Хватит 10 лет доказать: я изобретатель Томас Эдисон стою 2 миллиарда человек в мировой экономике. По изобретательству, конструированию, искусственному интеллекту я сильнее сборной мира (чемпион мира). Здесь мои изобретения: алгоритмы ИИ, роботы, ракеты, беспилотники, защита от РЭБ, навигаторы, радары, антирадары, экзоскелеты…
Изобретательский сайт против коллективизации человеческой мысли, профконкуренции, средств производства, собственности, ответственности, профобразования, бизнеса, жилья, земли. Возврат изобретателям контроля над мировой промышленностью отменой пошлины отечественным изобретателям на личные патенты на изобретения.
Госпредприятия собственность государства – силовой организации в лице класса силовиков. Нет у силовиков права предпринимательства в рабочее время, только в нерабочее время как частное предприятие с наемным управляющим.
Госпредприятия – собственность класса силовиков по монопольному праву распоряжения всей государственной собственностью. Государству принадлежит всё, даже дождевая вода. Госпредприятия – главная угроза безопасности гражданского общества – экономическая диктатура класса силовиков против остальных классов общества, дающих экономике предпринимателей.
Конституция запретит сосредоточение экономической и государственной власти у одного класса общества как попытку строить рабовладельческое государство (это неизбежно) типа СССР. Конституция разделит государственную и экономическую власть: госвласть у силовиков, экономическая власть у частных предпринимателей.
Социализм, Коммунизм, госидеология Евангелие (в США) – попытки силовиков строить рабовладельческие государства с растущими экологическими, климатическими углеродными, дождевыми и прочими налогами, штрафами, принудительным страхованием для финансирования паразитических рабочих мест госслужащих и силовиков для родственников силовиков – надо в Уголовном Кодексе как в Сингапуре 3 года тюрьмы госслужащим организующим родственникам рабочие места госслужащих.
Сайт посвящен конституционному запрету государству создавать госпредприятия, с исключениями: торговля оружием, центробанк, госбанк, производство систем шифрования информации. Список конституционных исключений от Парламента (по Конституции).
Поддержка военной, космической промышленности – госзаказы частным фирмам по итогам конкурса. 95% денег госзаказов – в личные целевые банковские счета (личный контроль, статья Уголовного кодекса) генераторов идей частных фирм. 5% или договор против саботажа – частной фирме.
Переводите на все языки все мои сайты – это общественное достояние человечества. На текст, картинки (все я рисовал) ограничений нет.

 1) ДОМАШНИЙ КОСТЮМ ТЕЛЕПРИСУТСТВИЯ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ
1) ДОМАШНИЙ КОСТЮМ ТЕЛЕПРИСУТСТВИЯ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ
В костюме телеприсутствия человек управляет реальным газотурбинным (бесшумный гибридный привод) андроидом-солдатом с задержкой управления 0,1сек в радиусе 6000км по прямому лучу, 3000км через низкоорбитальный спутник, 2500км по кабельной сотовой сети интернет.
С сетью ретрансляторов моей системы защиты от систем радиоэлектронной борьбы радиус управления андроидами-солдатами 2500км с задержкой (связь + дешифровка + работа приводов) управления 0,1сек. Мои изобретения, алгоритмы ИИ уменьшат аппаратные задержки в ~3 раза.
Изобретенный мной универсальный андроид-солдат будет забираться на скалы, висеть на одном пальце, устройством типа гранатомет закинет крюк в вершину скалы, газотурбинной (сменные пиротехнические патроны с кнопочным управлением + обгонная муфта) лебедкой за секунды на тросе пробежит на вершину скалы.
Костюм телеприсутствия для человека ростом до 1,82м: масса 300кг, высота 2,7м. ширина 2,7м. длина 2,87м
Цена костюма телеприсутствия для взрослого: как автомобиль бизнес-класса
Костюм телеприсутствия и виртуальной реальности – самый прибыльный товар мировой промышленности в ближайшую тысячу лет. Производство костюма телеприсутствия будет давать ~28–33% от всей прибыли полученной всеми участниками мирового промышленного рынка, андроиды ~15–20%.
Домашний костюм телеприсутствия 2 человека соберут за 20 минут с деталей входящих в обычную дверь. Настройки на тело человека за 3 секунды приводами делает софт.
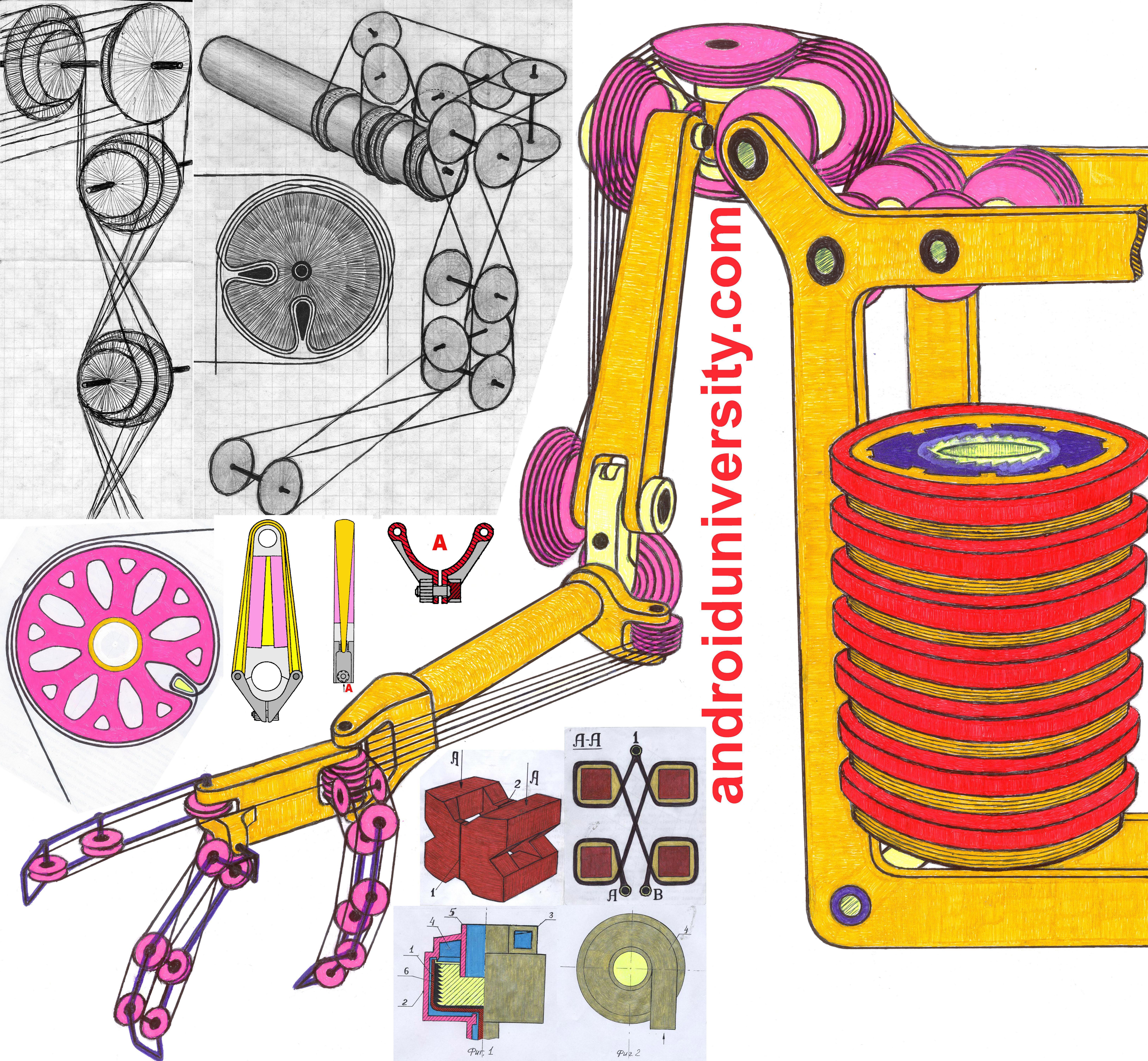
Костюм телеприсутствия и виртуальной реальности – это экзоскелет с пропорциональными датчиками сил, углов и приводами рук, ног внутри 3D-кардана (патент RU2134193) + 3D-видео шлема + 3D-звук
Человек ходит, бегает по таблицам баланса «вертикаль центра масс – точка опоры – горизонтальные ускорения туловища». 3 датчика ускорений туловища андроида 3D-карданом передают человеку все линейные, угловые ускорения.
Костюм телеприсутствия и виртуальной реальности миллиардами удаленных рабочих мест решит проблему старения населения, в миллиард раз увеличит число межконтинентальных денежных переводов. Управляя аватаром человек устает меньше, андроид сильнее
Виртуальная система управления костюма телеприсутствия
Жестом человек включит компьютер и выбрав в экране орган управления, управляет техникой с виртуальных органов управления неотличимых в работе и внешне от реальных органов управления. Приводы пальцев, рук, ног экзоскелета симулируют софтом любые штурвалы, джойстики, панели управления с колесиками регулировки
Костюм телеприсутствия универсальный интерфейс – дает 100% каналов управления любыми наземными воздушными подводными дронами, экскаваторами, бульдозерами
Костюм телеприсутствия универсальный симулятор – обучит спортсменов, солдат, летчиков, танкистов, пулеметчиков, парашютистов, эскаваторщиков, сварщиков, фрезеровщиков, токарей. Снайперский костюм телеприсутствия с файлом коррекции от профессионального снайпера. Костюм телеприсутствия симулирует любые тренажеры фитнеса.
Костюм телеприсутствия самый универсальный товар – заменит транспорт, телефон, систему образования половины профессий. Общение в костюме телеприсутствия и виртуальной реальности в Метавселенных превысит общение телефоном
2040-е: умные колонки эволюционируют в домашнего андроида с ИИ, с лазерным проектором в лбу и разнесенными по телу микрофонами, отделяющими речь говорящего человека от остальных звуков. Звуковой софт андроида различит собеседников по расположению в комнате и голосу, одновременно распознает речь нескольких человек.
КОСТЮМ ТЕЛЕПРИСУТСТВИЯ ДЛЯ УПРАВЛЕНИЯ ЧЕЛОВЕКОПОДОБНЫМ АВАТАРОМ МЕТАВСЕЛЕННОЙ
Костюм телеприсутствия будут использовать как костюм для Метавселенных. Фон, часть объектов Метавселенной протокол кеширования заранее грузит в компьютер пользователя, обновляя изменения. Костюм телеприсутствия в Метавселенной – это ведущий домен состоящий из человека + костюм телеприсутствия. Ведущий домен через сетевой домен управляет ведомым доменом.
Сетевой домен – аватар-сайт связывающий по интернету Ведущий и Ведомый домены.
Ведомый домен – управляемый человеком человекоподобный аватар Метавселенной
Многопользовательский аватар-сайт передает человеку:
1. виртуальные силы реакции среды Метавселенной через:
а) тактильные матрицы силы
б) приводы рук, ног костюма телеприсутствия
в) активную 3D-подвеску экзоскелета в костюме телеприсутствия
г) 3D-ударник экзоскелета передает человеку векторы ударов, вибрации
д) вибрационные сигнализаторы вектора скольжения ступней аватара
е) 3D-кардан
2. стереокартинку
3. все векторы прихода 3D-звуков
4. виртуальные температуры передают коже человека тепловые тактильные матрицы
5. виртуальные тепловые потоки передают коже человека тактильные матрицы теплового потока
В Метавселенных интерфейс платной вставки уличной видеорекламы в многопользовательских виртуальных городах Земли, Луны, Марса. Аватар-сайты Метавселенных + производство их оборудования по обороту денег превзойдут все остальные виды бизнеса вместе взятые.
Совместное одновременное телеприсутствие в платной онлайн-игре миллиардов человек – зарабатывают деньги, выгодные связи с участниками игры. Путешествия в виртуальное будущее.
Уровень силового контакта пользователей от 100% в танцах до 0% зависит от админа аватар-сайта. Уровень силового контакта 50% – пользователь в 3D-картинке шлема виртуальной реальности частично входит в образ других пользователей.
Международные протоколы Метавселенной соединят платные симуляторы личности с сетью: пользователи общаются с симуляторами известных личностей, путешествуют с ними, занимаются с ними сексом.
Турсайты в любую точку планеты, на дно реальной Марианской впадины с роботами-прожекторами. Машина времени: физическое участие в любых сражениях, событиях Истории, общение с её персонажами: играют актрисы актеры аватар-сайтов
Костюмы телеприсутствия для домашних животных оживят робозверей робозоопарков. Алгоритмы обработают звуки прошедших отбор домашних животных, ограничат скорость, силу, размах движений чтоб не ранили людей
Аватар-работники в радиусе 3000км в биржах аукционы (рейтинг + цена предложения) рабочих аватар-мест. Рейтинг: оценки заказчиков + спрос на работника. Аватар-работник не тратит топливо поездок на работу – расход нефти, газа, энергии уменьшится в 3 раза. Костюм телеприсутствия даст время посещать родителей. Аватары приносят тяжелые сумки с супермаркетов
Андроиды-куклы авторской работы: реальными, виртуальными куклами всех размеров в интернете управляют актрисы, актеры, общаясь с детьми
Андроиды-шахтеры добывают нефть, газ, редкоземельные металлы в шахтах на дне Ледовитого океана. В Арктике 30% мировых запасов нефти. Землетрясения: работающие с кабеля миниандроиды в шелях бетонных обломков зданий ищут людей
Андроид-пожарный: турбину андроида крутит углекислота, жидкий азот или горячая вода. Углерод-углеродные композиты, керамика, вольфрам-рений-танталовые сплавы, высокотемпературные диэлектрики типа нитрида бора, твердая смазка. Форма, поверхность андроида закругленные гладкие скользкие: протискивается в узкие проходы
Андроид-сварщик удешевит сварку, резку, раскройку лазерным и электронным лучом в вакууме. Объект сварки в тележке едет через шлюз в вакуумный цех. 20-метровый титановый центроплан бомбардировщика Ту-160 электронным лучом в вакуумном цехе варили сварщики в скафандрах. Вариант: аргоновый сварочный цех
ОРБИТАЛЬНЫЕ ЗЕРКАЛА УПРАВЛЯЮЩИЕ КЛИМАТОМ ЗЕМЛИ построят на орбите андроиды-сварщики, андроид-сборщики. Операторы часовых поясов Земли управляют пролетающими над ними андроидами
МАРС
Марс греют орбитальные зеркала построенные андроидами с костюмов телеприсутствия марсианских городов. День работы марсианской базы дешевле дня работы лунной базы на такое же число людей. Не нужен двухнедельный накопитель энергии как в лунной базе.
В марсианской базе меньше расход энергии на поддержание температуры и вентиляцию комнат, меньше цена обслуживания техники требующей силу тяжести (сантехника, трубопроводы), меньше проблем с температурой, радиацией, абразивностью (ветер шлифует песчинки) грунта; больше чем на Луне сила тяжести, дешевле доступ к природных ресурсам, сверхглубокая скважина даст теплоэнергию паротурбогенератору на фреоне.
Марсианская колония Илона Маска: скафандр NASA $12млн – ресурс до капремонта 25 смен по 7 часов. Давление воздуха, проблемы с пальцами в перчатках мешают работать. Нет защиты от радиации.
В костюме телеприсутствия нет проблем с пальцами, выполняемы тонкие работы (пайка мелких контактов, сборка наручных часов) с точным управлением пальцами андроида.
У костюма телеприсутствия ценой $70000 и покрытого нитридом титана (защита от абразивной пыли) андроида за $40000 ресурс до капремонта 2 года по 2 смены по 8 часов на Марсе, Луне.
Андроид точнее, сильнее человека. Гибридные газотурбинные андроиды на топливе магний + углекислый газ с атмосферы + аккумулятор.
Андроид работает с лазерными, электронно-лучевыми пистолетами: сварка, резка, сверление отверстий, очистка поверхностей от загрязнений, зарядка поверхностей отрицательным зарядом сдувает с них пыль в вакууме
Технология автономных самоокупаемых обитаемых баз Марса, Луны – костюм телеприсутствия + спутниковая сотовая связь – круглосуточная работа и навигация андроидов в любой точке Марса, Луны. Строят объекты андроиды ростом до 30м, коммуникации в трубах монтируют андроиды ростом ~10см. Космическая промышленность планет, астероидов будет производить миллиард раз больше чем на Земле
ЦЕНТРИФУГОВЫЙ КОСТЮМ ТЕЛЕПРИСУТСТВИЯ симулирует длительные перегрузки любого направления, силу тяжести крупной планеты, любые перегрузки боя летчиков-истребителей, спуск космического корабля с орбиты. Чемпионат центрифуговых боев летчиков-истребителей. Часть перегрузок симулирует торможение, ускорение центрифуги. Торможение от регенерации обратно в электросеть токов, наводимых постоянными магнитами концов центрифуги в трехфазных неподвижных обмотках
Костюмы телеприсутствия центрифуги космического корабля передадут вертикаль силы тяжести, картинку поверхности Юпитера. Весь экипаж космического корабля в образе андроидов из жаропрочных материалов, одновременно высадится на поверхность Юпитера. Связь в окнах прозрачности атмосферы Юпитера. Андроиды с магнитными ботинками в безлюдных торговых базах астероидов.
В космической центрифуге радиусом 20м человек через 2 недели при 38% (как на Марсе) земной гравитации не будет замечать вращение в оси центрифуги, паралельной его плечам. Вестибулярный аппарат человека менее всего чувствителен к вращению вокруг горизонтальной поперечной оси – эволюционно человек и другие хищники наиболее часто, с наиболее быстрым угловым ускорением использовали вращение головы, туловища (прыжки) вокруг горизонтальной поперечной оси.
Защита вестибулярного аппарата от морской болезни: софт плавно управляя осями-1-4 3D-КАРДАНА костюма телеприсутствия, держит ось плеч человека перпендикулярно плоскости вращения центрифуги
ПИРАТЫ НАПАЛИ НА АВТОНОМНЫЙ ТАНКЕР, КОНТЕЙНЕРОВОЗ – агентство охраны по спутнику выведет с сейфов андроид-охранников. Андроиды перестреляв пиратов с автоматов и гранатометов, уйдут в сейфы, закроют снутри. Управление андроидом дублировано в рентгеновском, терагерцовом диапазоне.
АНДРОИДНОЙ ОХРАНЫ ДОМА оператор домашним андроидом задержит грабителя до приезда полиции.
ЭПИДЕМИИ
Бактериологи, врачи как андроиды работают в лабораториях, больницах городов (военный карантин) с эпидемией от бактериологического оружия
ВОЕННЫЕ АНДРОИДЫ ГОРОДСКИХ БОЕВ
Андроиды-солдаты – это для наземных боев абсолютное оружие на уровне ядерного оружия. В отличие от воздушных дронов андроид-солдат почти не требует энергию, денег на боевое дежурство. Поврежденному снарядом андроид-солдату хватит одной руки доползти к солдату противника, проткнуть пальцем череп. Жизнь обычного солдата оценивают $1млн – цена 30 бесшумных андроид-солдат, которыми на расстоянии 2500км управляют геймеры с домашних костюмов телеприсутствия.
В позиционной войне за 100м в городе отдавали жизнь сотни тысяч солдат. Высотой в 30см миниандроиды-солдаты в городских боях проникают в дома противника по заполненной канализации или вентиляционной шахте используя катушку с кабелем, через трещины в стенах от снарядов.
Военные андроиды
1. горные андроиды могут совершать длинные прыжки, работать альпинистами
2. степные андроиды тяжелобронированные с противоминными ступнями
3. тяжелые андроиды обслуживают крупнокалиберные минометы с весом активно-реактивной мины до 250кг. Мина на высоте 10км раскрывает длинную вертикальную прозрачную пластиковую трубу-дирижабль с гелием. Оператор мины по телекамере находит цель, пикирует на неё
Геймеров управляющих андроид-солдатами подготовят чемпионаты виртуальных аватар-игр, где одновременно взвод, рота или армия геймеров. Призы пятерке победителей. Ранения софт симулирует ограничивая цифры приводов, датчиков. Снос пуль ветром, дождем симулирует софт. Эксперты Минобороны определят победителей чемпионата, дадут виртуальные воинские звания. Четвертьфиналы, полуфиналы, финалы чемпионата.
Реальные бои: лучших геймеров подключат к андроидам с лучшей позицией. Андроид наступил на мину – ногу заменят андроиды, соединят 7 тросов ноги, кабель датчиков. Артиллерия противника уничтожив часть андроидов, 4 минуты убегает на 2км от ответного удара. За 4 минуты с остатков андроидов другие андроиды соберут новых андроидов. Андроид оптимизирован на сборку андроидами: можно наступать миллионами андроид-солдат в сотовой сети андроидов-ретрансляторов.
Андроид-солдаты задних рядов идут на автопилоте ИИ. Подбили переднего андроида – софт переключит человека-оператора на заднего андроида. Подбитый андроид в красной рамке в экране.
Человек ставит курсором метку цели. На метке автомат сопровождения цели ставит время кадра. Софт андроида прокручивая кадры назад покадрово распознает, сопровождает метку на цели. Человек жмёт на курок – андроида автомат сопровождения цели уничтожит цель в уязвимое место снайперской винтовкой. Быстродействие «сработал датчик – выстрел» военных роботов с ИИ 0,003сек, живой солдат 0,3-1сек
Глаз андроида: 2 широкофокусных + 10 узкофокусных телекамер определят расстояние по длине фокуса и стереоэффекту. Человек-1 спусковым крючком щелкает по цели – появляется красный крестик, спусковой крючок переходит в боевой режим. Софт наводит на цель узкофокусную телекамеру с зумом. Снайпер поразит каждую цель одним патроном в порядке приоритета целей в процентах, по голосу человека-1. Цели помнит автомат сопровождения цели
СЕТЬ РЕНТРАНСЛЯТОРОВ СВЯЗИ
По ширине фронта первичные ретрансляторы сигнала. С них роботы-кабелеукладчики через трубку укладывают в траншее, прорезаемой алмазным диском в грунте на глубине 10см на расстоянии 60км, оптоволоконные кабеля. Кабеля под грунтом идут к вторичным ретрансляторам.
Вторичные ретрансляторы передают одним лучом сотню цифровых сигналов «человек – андроид». В голове андроидов третичный ретранслятор (лазер с датчиками) ретранслирует сигнал андроид-солдатам спереди
Вторичные ретрансляторы рентгеновскими, ультрафиолетовыми или фиолетовыми лучами направляют на андроидов луч-1, луч-2. Луч-1 передает сигнал от человека. Луч-2 отражаясь от модулирующего уголкового отражателя андроида, с информацией его датчиков возвращается к вторичному ретранслятору, к человеку
МОДУЛИРУЮЩИЕ УГОЛКОВЫЕ ОТРАЖАТЕЛИ (моё изобретение) без приводов, систем стабилизации дают сигналы датчиков андроида костюму телеприсутствия через модуляцию отраженной энергии лазерного луча ретранслятора. Зеркала модулирующего уголкового отражателя – модуляторы меняющие яркость отраженного лазерного луча – передача сигнала с андроида. Андроид не тратит много энергии на обратную связь, только на модуляцию.
Связь с андроидом на 2 длинах волн лазерного луча. Длина-1 волны луча-1 для фотоэлемента андроида. Длина-2 волны луча-2 для ответного уголкового отражателя, модулирующего луч-2 и отправляющего его обратно.
Длины волн лучей-1-2 – по принципу максимума поглощения в атмосфере, минимума флуоресценции в внешней среде чтоб беспилотники противника не видели. У фотоэлемента, уголкового отражателя в зеркалах фильтры от помех и омыватели. Модулирующие уголковые отражатели в голове, плечах, ладонях андроида. Софт андроида выключает модуляцию луча в модулирующих уголковых отражателях, не направленных на вторичный ретранслятор.
Свой-чужой лазерный луч андроид определит диалоговым шифром. Связь отраженными от многих стен лучом по цепи андроидов-ретрансляторов. У противника гранаты многоспектральной дымовой завесы – её пробьют ретрансляторы радиоволнами, синтезированными биениями двух частот лазера. Оптоволокно сматываясь с катушки андроида, даст связь с ретранслятором на 30км
В ЯДЕРНОЙ ВОЙНЕ для защиты радиосвязи от высотной разности потенциалов от электронов сдутых с молекул воздуха гамма и рентгеновскими лучами высотного (80-500км) термоядерного взрыва, в передающую радиоантенну андроид-солдата идет высоковольтный сигнал повышенной частоты с лампового передатчика. Приемная антенна андроид-солдата последовательно соединена с ламповым приемником через два (1 на каждую полуволну) поляризованных высоковольным напряжением керамических конденсатора малой емкости, высокой добротности
АНДРОИД-ЗАПРАВЩИК БОЕПРИПАСОВ
включает ультразвуковой, инфракрасный, рентгеновский сигнал опознавания «свой-чужой». По таблице времени излучения сигнала, андроид-солдат микрофонами в плечах по разнице фазы звука определит расстояние, направление до андроид-заправщика. Андроид-заправщик снимет с андроид-солдата рюкзак, крепит новый с аккумулятором топливом боеприпасами
ЧЕЛОВЕК В КОСТЮМЕ ТЕЛЕПРИСУТСТВИЯ
отразит атаку сотни солдат противника на объект, управляя с расстояния 2000км поочередно сотней андроид-солдат, сотней квадрокоптеров, телеуправляемыми роботизированными минометами (управляемые мины с телекамерой). Сеть датчиков звуковых, сейсмических волн с высоким угловым разрешением.
Общий софт андроидов и квадрокоптеров микрофонами вычислит траекторию пролетевшей пули – по разнице в времени прихода звука и времени полета между двумя микрофонами. Дальность ствола противника найдёт софт: чем ближе форма кривой звука микрофона к Z-графику ударной волны, тем дальше (таблицы решений) ствол при равной мощности звука пули
Софт найдёт андроида (квадрокоптер) к которому близко летела пуля, переключит на него человека, покажет цветными метками экрана где андроид и противник. Человек выберет ракурс телекамер, алгоритм и его цифры
ЗАЩИТА ОПТИКИ ОТ ПУЛЕМЕТОВ: у андроида сверхтвердые зеркала-перископы телекамер с прогрессивной
(жесткость плавно растет до бесконечности как в подвеске заднего колеса кроссового мотоцикла)
3D-подвеской – ослабит импульс пуль, осколков с любым вектором удара.
Зеркала с вольфрам-молибденового сплава с отражающим покрытием: царапина от пули – даем ток по зеркалу – покрытие из легкоплавкого сплава индия плавится, застынет без царапин (поверхностное натяжение жидкого сплава).
После зеркала лучи идут в кристалл-F. Отраженные от зеркальной поверхности кристалла-F под углом 45° лучи идут в телекамеру. Противник включил лазер выжигающий матрицу телекамеры – кристалл-F в котором лазерный импульс сорвал с орбит оптические по энергии перехода электроны, становится прозрачным пропуская насквозь всю энергию лазера. Действие лазера прекратилось – телекамеры прозреют после охлаждения кристалла-F.
Андроиды-солдаты с импульсным рентгеновским прожектором видят сквозь стены в отраженных рентгеновских и микроволновых лучах сквозь стены. Андроид-солдаты обмениваются видео узконаправленными многочастотными ультразвуковыми лучами.
На 2км в условиях гонки мощностей узконаправленными лучами непрерывно блокировать все частоты электромагнитных волн маловероятно. Многочастотная пакетная цифровая радиосвязь с псевдослучайным перескоком частоты работает с уровнем помех 10000 раз сильнее сигнала.
Противник дорогим средством радиоэлектронной борьбы РЭБ даст помеху в 10000 раз сильнее только на 100-200м. Связь ретрансляторами узкого луча тысячей радиочастот одновременно. Сильнее помехи – меньше усиление приемника, больше мощность передатчика.
ЗАЩИТА РАДИОСВЯЗИ ОТ РЭБ (радиоэлектронная борьба)
Для повышения отношения Сигнал/шум используются электромагнитные волны максимально поглощаемые атмосферой. По форме графика помехи от РЭБ составляют форму графика (разностная частота) корректирующей электромагнитной волны (с передатчиков сигнала обратной связи), чтоб помехи от РЭБ не мешали радиосвязи с андроидами.
В корректирующей электромагнитной волне софт в реальном времени в каждой частоте помехи настроит сдвиг фазы, компенсируя смещение уровня полярности полуволн сигнала от постоянной составляющей (за полупериод низкочастотных составляющих) помехи от РЭБ.
Технология компенсации смещения уровня постоянной составляющей дает андроидам:
1. двухстороннюю радиосвязь под работающими мощными высоковольтными линиями электропередач
2. высоковольтную двухстороннюю радиосвязь в окнах прозрачности плазмы после применения термоядерного оружия
Постоянная составляющая любых электромагнитных волн передаётся на любые расстояния, может в одной полярности иметь 99% всей энергии (несимметричные трехугольные импульсы радиопередатчика) электромагнитной волны в приемной антенне (в ней только постоянный ток).
У меня изобретения в этой технологии, применяемой в трансформаторе постоянного тока для бесконтактной (других способов нет) закачки энергии в сверхпроводящее кольцо мощных сверхпроводящих электромагнитов. Эти электромагниты неограниченное время не нуждаются в электроэнергии, только затраты на криогенный холодильник.
На Луне сверхпроводящее кольцо с трансформатором постоянного тока – дешевый накопитель неограниченной энергии на многолетний срок, мощное магнитное поле которого можно использовать как часть электромагнитной катапульты для заброса грузов на орбиту, снятия грузов с орбиты. Это магнитное поле отклонит от Луны протоны солнечной радиации.
Андроид-солдат уничтожит средство РЭБ самонаводящимися на помеху минами с миномета в рюкзаке. Средство РЭБ выключится – софт инерциального навигатора (пьезогироскоп) уточнит траекторию полета мины по точкам приема сигнала РЭБ.
Вмешательство хакера маловероятно: диалоговый пароль + диалоговая перемена шифра канала каждые 1-5сек + добавление сигнала генератора случайных чисел + неизвестен алгоритм сжатия + учет истории ракурса прихода сигнала.
Передатчик цифрового сигнала рентгеновской обратной связи – рентгеновских импульсов – коаксиальный вольфрамовый резистор на который через коаксиальный кабель и конденсатор дают сверхкороткие импульсы 100кВ. Конденсатор с высокой добротностью ограничит ток, повысит крутизну фронта рентгеновского импульса. Приемник цифрового рентгеновского сигнала – иодид цезия на кремниевом фотодиоде.
Городской бой военных андроидов: узконаправленная инфракрасная лазерная связь с беспилотников-ретрансляторов с ИИ выбирающим (тепловизор) поверхности отражающие луч. Инфракрасные помехи: связь терагерцовым, рентгеновским лучом.
Модулирующие уголковые отражатели спереди, сзади, сбоку, сверху андроида пронумерованы. По инерциальному навигатору, картинке тепловизора (углы прихода луча) и помехам софт (человек) найдет какие модулирующие уголковые отражатели андроида включить.
Установки шаблонных реакций ИИ. Шаблоны: распознавание; уничтожение солдат противника в заданном координатами и временем секторе если нет ответа опознавателю «свой – чужой».
Мощные помехи в бою – человек пробивает связь с андроидами мегаваттами узконаправленных электромагнитных волн мощного передатчика, использующего электроэнергию бесшумных газотурбогенераторов. От этих мегаваттов андроид-солдаты не откажут:
1. микропроцессоры высоковольтные: электромагнитные бомбы наводят в андроиде наиболее вероятное напряжение 150-300V. Уже есть транзисторы на 6000V, контролеры на 500V
2. вместо проводов заземленные коаксиальные кабели, оптоволокно (оптоволокно сечением 1кв.мм передает мощность 100кВт)
3. микропроцессорный блок андроида за экранами. Экраны-1-2 из меди. Между медными Экран-1 и Экран-2 поляризующее постоянное напряжение до 100000V (поляризация диэлектрика между экранами) – защита от высотной разности потенциалов от сдувания электронов с молекул воздуха гамма и рентгеновскими лучами термоядерного взрыва на высоте 80-500км. Между экранами-1-2 диэлектрик с высокой диэлектрической проницаемостью сглаживает острые пики волн электромагнитных бомб.
Экран-3 – феррит – защита от вихревых токов.
Экран-4 – эрбий 167Er – защита микропроцессора от гамма и рентгеновских лучей.
Экран-5 – гадолиний 157Gd – защита микропроцессора от нейтронных бомб.
Для сильной радиации ламповые микропроцессоры, ретрансляторы.
Лазеры не ослепят андроида – спектральные, поляризационные (круговая поляризация правого, левого вращения + 2 оси линейной поляризации) фильтры телекамер. Алгоритм фильтра: максимум суммарной длины тонких линий картинки: верхние частоты видеосигнала.
Звук, ультразвук андроид ладонью передает через стену, трубопроводы приложив к ним руку с 2D-вибратором. 2D-вибратор позволяет по трубе одновременно отправить канал-1 поперечной волной в трубе и канал-2 продольной волной в трубе.
Два андроида ладонными вибраторами бесшумно отправляя с двух концов трубы ультразвук, биениями частот создадут посередине трубы голос человека. Заставят голос перемещаться вдоль трубы
ПРОТОКОЛ УЧЕНИЙ
2032г горные учения: Белая Армия андроидов сражается с Черной Армией андроидов для решения технических проблем военного аватаростроения. В учении все виды телеуправляемого оружия. Белой Армией андроидов управляет Генерал-1. Черной Армией андроидов управляет Генерал-2.
Для получения ключевой информации за минимум денег – Протокол учений. Протокол учений: у генералов, специалистов право ставить на Паузу сражение андроидов для решения технических, иных проблем. Если в Паузе выбор между двумя вариантами сражения, инженер называет стоимость вариантов сражения. Генералы Судейской коллегией выберут вариант сражения с высоким параметром «качество – цена».
Для защиты от «эффекта толпы» принимающая решения Судейская коллегия состоит из взаимно независимых генералов-экспертов, не имеющих права общаться между собой при обдумывании и вынесении решения Судейской коллегии. Решение Судейская коллегия выносит по варианту, за который проголосовало большинство. Эта система точно оценит личный профессиональные качества генералов на основе изучения их личных, а не чужих мыслей.
Техническая проблема – Паузу включит технический специалист. Проблема невелика – беспилотники вернут в точку где были, сражение возобновят.
В Паузе генералы после ознакомления с проблемой называют время на обдумывание с специалистами решения проблемы. Список специалистов дает приказ. Каждый генерал имеет право дать голос любому числу специалистов для голосования по решению проблемы в их теме.
Вопросы прокладки в бою кабельных линий связи, снабжения андроидов топливом боеприпасами решают андроиды-заправщики, андроиды-связисты. Люди в территории сражения андроидов могут быть только в Паузе. Вопрос добавления мин в участке боя – голосование генералов. В Паузе голосование по изменению настроек или диапазонов работы датчиков роботов.
Проблема требует много времени – Паузу установят на месяцы голосованием генералов, специалистов. Длительность сражения – по времени или по площади захваченной территории. Сражение затянулось – голосование генералов объявит окончание сражения.
Офицеров Армии будет выбирать двухступенчатая система. Ступень-1: геймеры в специализированных военных играх в Метавселенной Министерства обороны годами доказывают свое превосходство над геймерами.
Ступень-2: лучшие геймеры в составе отдельных полков из реальных андроид-солдат по очереди воюют между собой на полигоне. По итогам боев андроидов-солдат взаимно независимые эксперты дают геймерам оценку в процентах от идеального результата. Взаимно независимые эксперты голосованием определяют какое виртуальное или реальное воинское звание получит каждый геймер.
АНДРОИД С ВОДЯНЫМ РЕАКТИВНЫМ РАНЦЕМ
Военные захватывают корабль андроидами с водяным реактивным ранцем. В нижнем конце шланга гидрореагирующее топливо крутит турбину с насосом. Часть-1 андроидов приземляется в палубу корабля, отстреливает реактивный ранец.
Часть-2 андроидов летая над кораблем в ранцах заменяют авиацию. Перепуск части воды – маскировочный туман. Шланг ранца бронируют керамические пластинки с отверстиями для кевларовых волокон.
Выбор видео любой телекамеры для просмотра в бою. Видео телекамер передает высоковольтная однопроводная линия связи через столб воды в шланге. Ультразвуковая связь на тысяче частот.
БЕТОНОБОЙНЫЙ ВОЕННЫЙ АНДРОИД
Внутри левого локтя андроида гидроцилиндр, сверхтвердым концом выходящий в тыльную часть ладони. Приложив тыльную часть ладони к бетонной глыбе или скале, андроид через вакуумный разрядник дает 20000-100000V в электроды внутри жидкости гидроцилиндра. Электрогидравлический эффект – конец гидроцилиндра с силой сотни тонн бьет без зазора бетон ломая бетонные мосты противника.
На низкой мощности используя биения частот, андроид прижатой к стене рукой передаст сквозь метровую бетонную стену громкую речь (Сдавайся мясо!) биениями высоких частот
ПОДВОДНЫЕ АНДРОИДЫ
Управляемые с подлодки по кабелю военные андроиды на подводных мотоциклах будут прожигать дно кораблей противника термитным стержнем. Закачав пиротехническим шприцом полужидкую взрывчатку, взорвут противника
ГЛУБОКОВОДНЫЕ АНДРОИДЫ
Для поиска под водой шифровального оборудования затонувших кораблей, ядерного оружия, подбитых беспилотников противника – глубоководный ретранслятор с двумя андроидами. Ретранслятор с аккумулятором, прожекторами спускают на кабеле-1 с подлодки.
Кабель-1: электропитание, оптокабель для управления с костюма телеприсутствия. Кабель электропитания: оптоволокно с рассеивающей линзой на конце + фотоэлементы. Дублирование связи: связь лазерными лучами в воде, пакетная ультразвуковая связь по воде или металлическим конструкциям затонувших кораблей.
Вариант-2: оптоволокно лазерным излучением нагревает воду в котле, пар крутит паротурбинный электрогенератор.
Вариант-3: кабель постоянного тока, трос с электроизоляцией, провод-2 морская вода.
С ретранслятора по кабелю андроиды спускаются в затонувший корабль. Андроид проходит отсеки корабля, 2-й подстраховывает сзади. Подводная сварка, резка отсеков корабля
МИНИАНДРОИД-СВАРЩИК
заварит протекающие тонкостенные трубы теплообменников атомных электростанций
МИНИАНДРОИД-ХИРУРГ
С копчика миниандроид-хирурга высотой 5мм идет тонкий длинный скользкий коаксиальный ленточный кабель связи, электропитание постоянного тока. Выполнившего операцию андроида за кабель вытягивают наружу, снижая его трение об стенки кровеносных сосудов продольными звуковыми волнами в кабеле.
Вариант-2: ленточная энерго-антенна – источник электропитания миниандроида. Энергию в энерго-антенну индукцией передает параллельный ей ленточный провод-1 снаружи тела теловека. Провод-1 подключен с обоих концов раздельно к блоку питания. Энерго-антенна передает сигнал обратной связи. Дублирует канал управления по рентгеновским лучам.
Чтоб миниандроид-хирург двигаясь в кровеносном сосуде не закупорил его как тромб, его ультразвуковой датчик измеряет скорость крови. Скорость крови мала – миниандроид-хирург руками, ногами раздвигает стенки сосуда.
Привод миниандроида: линейные пьезоприводы двигают длинные пластины-Р. Пьезоприводы питает пьезотрансформатор миниандроида. Роль датчиков углов миниандроида выполняют пьезопривода пластины-Р с магнитотвердого материала.
Передний ход пластины выполняет пьезопривод-1. Задний ход пластины выполняет пьезопривод-2. В заднем ходе постоянное напряжение отодвигает пьезопривод от пластины, чтоб не мешала обратному движению рейки.
В пластинах-Р магнитные метки угла, считываемые магнитной головкой с 8 последовательными зазорами. С током подмагничивания переменной частоты магнитная головка считывает цифровой код угла даже с неподвижной пластины-Р.
Хирург виртуальной системой управления настроит разный масштаб скорости раздельно для каждой из трех осей системы координат миниандроид-хирурга. Хирург виртуальной системой управления настроит удобное положение миниандроида, наклоняя приводами в нужную сторону операционный стол.
В кровеносных сосудах миниандроида двигает сфокусированное на нем толкающее (резко нарастает, медленно спадает амплитуда полупериода колебания) электромагнитное поле и притягивающее (медленно нарастает, резко спадает амплитуда полупериода колебания) электромагнитное поле.
Поле создает Фазированная Антенная Решетка ФАР: на пациенте сверху сетка с 80 катушек с обмоткой, дающих 4 луча сфокусированных софтом на миниандроиде. Лучи-1-3 толкающие. Лучи-2-4 притягивающие. Сумма векторов лучей двигает миниандроид туда, куда специальным жестом показал хирург.
ФАР есть в операционном столе под пациентом. Механизмы сбоку операционного стола прижимают к пациенту боковые панели ФАР. ФАР имеют трехосевую обратную связь с датчиком положения миниандроида на основе трех импульсных (привязка к частоте кадров) рентгеновских лучей + 3 рентгеновские камеры.
Лучи ФАР держат миниандроида в потоке крови, прижмут миниандроида к стенке кровеносного сосуда, если поток уносит его. Хирург Виртуальной системой управления костюма телеприсутствия, приводами операционного стола наклонит пациента в любую сторону. Пациент зафиксирован цепными зажимами равномерного прижима с датчиками силы.
Хирург ФАР ставит по магнитному вектору-1 местную вертикаль, по магнитному вектору-2 нулевой азимут (стрелка в экране хирурга) миниандроида. Вектор-1 длительно, вектор-2 кратковременно дает ФАР.
Миниандроид пилой, горячей струной режет тромб, раковую опухоль на куски, пакует в мешок. Двигая магнитным полем его с мешком за кабель вытянут наружу. Миниандроид-хирург клейкой желатиновой лентой склеит внахлестку разорванные нервные волокна сломанного позвоночника, сделает адресную инъекцию стволовыми клетками, ультразвуковым копьем удалит камни в почках.
В кровеносном сосуде миниандроид разведенными ступнями с острой насечкой держит вращающие моменты при нарезке кусков раковой опухоли. Магнитное поле прижимает, держит миниандроида в местной магнитной вертикали.
Хирург колесиком Виртуальной системы управления увеличив отношение N между пройденным его руками расстоянием и расстоянием пройденным инструментом в руке миниандроида, повысит точность операции.
Правый светодиодный прожектор в голове миниандроида имеет общий с правой телекамерой стеклоочиститель. Аналогично слева.
Микростанок с ЧПУ изобретенный мной, изготовит детали миниандроида-хирурга. Размеры измеряет проекционная система с зеркалами.
Инструмент-1: мелкозернистый алмазный диск
Инструмент-2: два оптоволоконных импульсных ультрафиолетовых лазера пересечением фокусированных лучей испаряют материал, делают высокопрочные детали с алмаза, карбида бора, нитрида кремния
Нанометровой точности привод станка: в суппортах станка дополнительный ультразвуковой пьезоэлектрический привод типа «молоток + наковальня». В паузах работы привода электромагнит увеличивает трение суппорта.
Привод 3D-карданного подвеса микроцеха с микростанком, переворачивает микроцех – деталь сверху, сверло снизу, стружка сыпется вниз. Режим обработки материалов станочник подберет по звуку пьезомикрофона микростанка, глядя телекамеры микроскопов вакуумного микроцеха. Конструкция миниандроида оптимизирована под станок.
Отверстия сверлит ультразвуковой магнитострикционный стержень с алмазами в торце, двигаясь вперед-назад с поворотом в продольной оси. Контроль дефектов деталей рентгеновским томографом микроцеха. Управляемые с костюмов телеприсутствия миниандроид-рабочие вакуумного микроцеха, на микростанках с электронно-лучевыми и шлифовальными инструментами изготовят, соберут миниандроид-хирургов.
Управляемый человеком миниробот внутри человека – голливудские фильмы:
Фантастическое путешествие (Fantastic voyage) 1966г
Внутреннее пространство (Innerspase) 1987г
В фильмах миниробот размером ~1мм плавает в кровеносных сосудах человека, совершая хирургические операции
АЛЬПИНИЗМ
Пользователи сайта виртуального космоса в костюме телеприсутствия как группа альпинистов всходят на горы Земли и Марса по цифровым картам, параметрам (трение, твёрдость, сыпучесть) среды. В горах Венеры силу ветра симулируют 3D-кардан, активная 3D-подвеска экзоскелета
ЗАХВАТ ДВИЖЕНИЙ АКТЕРОВ В КИНО
Одновременный захват движений актеров костюмами телеприсутствия повысит точность захвата движений актеров.
РЫНОЧНЫЙ АНАЛОГ КОСТЮМА ТЕЛЕПРИСУТСТВИЯ
По конструкции, мощности приводов, каналам силовой обратной связи рыночный аналог костюма телеприсутствия – автосимулятор на подвижной платформе. Костюм телеприсутствия втрое больше, себестоимость производства 6 раз больше.
Проблемы угловой и силовой обратной связи руля, подвижной платформы автосимулятора с виртуальным автомобилем описаны пользователями в интернете – меньше риск инвесторов костюма телеприсутствия
Я Томас Эдисон всемирный монополист – у меня 99% готовых незапатентованных ключевых изобретений по теме: ДОМАШНИЙ КОСТЮМ ТЕЛЕПРИСУТСТВИЯ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ. У меня ключ от технологии самого прибыльного товара мировой промышленности в ближайшую тысячу лет: ~28–33% от всей прибыли мирового промышленного рынка. Костюм телеприсутствия и виртуальной реальности изменит ход мировой истории сильнее, чем паровой двигатель, ядерное оружие
Аналог моего проекта – разрабатываемый в Германии Марселем Ризом костюм виртуальной реальности Holotron. Он в начале разработки – я разрабатываю костюм телеприсутствия с 2002г. Александр Стрельцов разрабатывает костюм телеприсутствия с 1997г. В костюме виртуальной реальности Holotron нет алгоритмов ИИ, нет большинства функций моего костюма телеприсутствия. У меня всё это есть и в открытой форме ниже.
КОСТЮМ ТЕЛЕПРИСУТСТВИЯ СОСТОИТ ИЗ:
1. модуль Экзоскелет
2. модуль Экзоперчатка
3. модуль Регулировочный винтовой привод настройки экзоскелета под размеры человека
4. модуль Шлем виртуальной реальности
5. модуль Компьютер обратной связи
6. модуль Компьютер безопасности
7. модуль Групповой привод экзоскелета
8. модуль Активная 3D-подвеска экзоскелета
9. модуль 3D-ударник экзоскелета
10. модуль Вибрационный сигнализатор вектора скольжения ступни андроида
11. модуль 3D-кардан
12. модуль Привод 3D-кардана
13. модуль Балансировка экзоскелета в 3D-кардане
14. модуль Напольная рама костюма телеприсутствия
УГЛОВАЯ И СИЛОВАЯ ОБРАТНАЯ СВЯЗЬ С АНДРОИДОМ
передает цифры датчиков силы, угла по интернету в обе стороны:
1. углов (перемещения)
2. угловых скоростей (скорости перемещения)
3. силы (моменты)
4. скорости изменения сил (скорости изменения моментов)
Датчики угла, силы андроида передают датчикам экзоскелета сигнал, повторяющий график действия внешней среды на датчики андроида.
Разность цифр углов рук (ног) андроида, экзоскелета дает знак перемещения привода. По знаку привод уравнивает цифры датчиков угла.
Сила больше с стороны андроида – цифры уравняет привод экзоскелета.
Сила больше с стороны экзоскелета – цифры уравняет привод андроида.
Без силовой обратной связи сила прижима или захвата андроида резко скачет 0-100% – руки андроида раздавят груз, травмируют человека рядом с ним.
Без силовой обратной связи силы реакции внешней среды передаются пользователю с резкими мгновенными колебаниями силы реакции от 0% до 100% – возможны травмы пользователей, судебные иски. Поэтому костюм захвата движений невозможно использовать как костюм телеприсутствия.
В костюме телеприсутствия человек жмет датчики силы экзоскелетов рук, ног. Датчики включив привод убегают от человека, обнуляя его силу, двигая руками (ногами) андроида до порога разности «угол руки андроида – угол руки человека»
У 3D-кардана экзоскелета угловая обратная связь с двухосевым датчиком наклона туловища андроида и трехосевыми гироскопическими датчиками углов в туловище андроида
ДАТЧИК СИЛЫ
это интерференционный оптоволоконный тензодатчик силы или виброчастотный тензодатчик силы, приклеенный к рессоре с роликом или к другой детали экзоскелета. Ролик рессоры прижимаясь к тросу, измеряет силу натяжения троса по прогибу рессоры. Ролик в дальнем от привода конце троса – меньше влияние упругости троса на тензодатчик и задержку сигнала. У тросов таблицы решений упругого удлинения троса.
Оптоволоконный датчик силы – это вклеенное в конструкцию экзоскелета оптоволокно с зеркальным торцем. Свет когерентного лазера в оптоволокне отражает его зеркальный торец. Нет нагрузки – отраженный свет вернувшись назад в противофазном режиме сложения волн гасит луч лазера на фотоэлементе. Приложенная сила удлинила оптоволокно: возникший от сдвига фазы волн свет ловит фотоэлемент. Его выходной ток пропорционален приложенной к конструкции силе.
Проводниковый виброчастотный датчик силы работает по принципу сложения прямой и отраженной СВЧ-волн. Это СВЧ-аналог оптоволоконного датчика силы.
Дублирующий датчик силы – это сила тока муфты сцепления привода
ВАРИАНТ-2 датчика силы: давление меняет электропроводность пластинки тетрахлорида циркония сдавливаемой рычагом оси ролика
ВАРИАНТ-3 датчика силы: в тросе пьезоизлучатель углом 90° к оси троса поперечной волной дает ультразвук в 4 частотах стандартной амплитудой. Сила в тросе – по отношению амплитуд 4-х частот пьезоприемников
ПРОПОРЦИОНАЛЬНАЯ ШКАЛА БИТНОСТИ ДАТЧИКОВ СИЛЫ
дает одинаковую процентную точность передачи силы в всём диапазоне сил. 1 бит ступенька силы сигнала датчиков силы андроида и костюма телеприсутствия. В начале шкалы 1 бит малая цифра: в легком прикосновении пальцев андроида к поверхности силы малы. При росте силы прижима пальцев андроида к поверхности, каждая последующая ступенька силы крупнее: разница сил между ступеньками силы растет в одинаковой пропорции
КАЛИБРОВКА БИТНОСТИ
Битность датчиков андроида меньше битности датчиков костюма телеприсутствия – работа по таблице «битность андроида – битность костюма телеприсутствия»
СТАБИЛИЗАТОР МЕЖБИТОВЫХ КОЛЕБАНИЙ
Между новым и предыдущим битом датчика силы (угла) руки андроида межбитовые колебания убирают таблицы нелинейных графиков скорости уменьшения силы (угла)
ОДНОДАТЧИКОВОЕ УПРАВЛЕНИЕ ЭКЗОСКЕЛЕТОМ: привод держит постоянной силу датчика-1 силы экзоскелета руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина
ДВУХДАТЧИКОВОЕ УПРАВЛЕНИЕ ЭКЗОСКЕЛЕТОМ: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод
ДИАГНОСТИКА
Однодатчиковое управление: с ростом силы датчика сгибателя руки (ноги) сила датчика разгибателя обнулится или мала. Нет – отказ датчика разгибателя. Отказ: в экране схема костюма телеприсутствия с мигающим красным цветом отказавшего датчика. Аналогично диагностика датчика сгибателя.
Отказ двухдатчикового управления – работает однодатчиковое управление. Голосование дублированных датчиков сгибателя и разгибателя = 4-кратное дублирование датчиков костюма телеприсутствия
СКОРОСТЬ ПРИВОДА КОСТЮМА ТЕЛЕПРИСУТСТВИЯ ПРЯМО ПРОПОРЦИОНАЛЬНА:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
ЗАЩИТА ОТ КОЛЕБАНИЙ ТРОСОВ: меньше разность сил пар датчиков – меньше скорость привода по выбранному человеком графику, алгоритму
МЕХАНИЗМЫ ЭКЗОСКЕЛЕТА мышцами человека соединяют все оси шарниров экзоскелета с осями суставов человека – моменты приводов идут только через суставы человека
КОМПЕНСАЦИЯ ВЕСА ЭКЗОСКЕЛЕТОВ РУК, НОГ
На старте рука на продольной горизонтальной плоскости экзоскелета локтя. Суставы рук, ног в одной вертикальной плоскости, согнуты на угол 90° чтоб по суставам регулировочные винтовые приводы установили длину экзоскелетов бедра, голени, локтя, предплечья.
Под запястьем, под верхним суставом локтя датчики силы, взвешивающие вес локтя, предплечья. Вес локтя X1 равен цифре датчика силы под запястьем плюс 60%. Вес предплечья X2 равен удвоенной цифре датчика силы под верхним суставом локтя.
На старте бедро лежит на продольной горизонтальной плоскости экзоскелета бедра, голень вертикальна и не опирается на экзоскелет ступни. Вес ноги только на экзоскелетах бедра и таза, спина вертикальна. В датчике силы под коленом софт фиксирует вес-1.
Регулировочный винтовой привод поднимет экзоскелет ступни на 1см выше датчика силы под коленом. В датчике силы ступни софт фиксирует вес-2. Из цифры вес-1 датчика силы под коленом софт вычтет цифру датчика силы ступни, получит цифру-3. Вес бедра X4 равен цифра-3 плюс 150%.
Вес голени X3 равен вес-1 в датчике силы под коленом минус 40% веса бедра. Регулировочный привод опускает экзоскелет ступни до заданного значения цифры датчика силы ступни. Регулировочные винтовые приводы зажимают у колена голень, бедро.
Датчики сил рук настроены на разную минимальную силу срабатывания привода при ходе руки вверх (цифра Ц1) и ходе руки вниз (цифра Ц2).
Датчики сил ног настроены на разную минимальную силу срабатывания привода при ходе ноги вверх (цифра Ц3) и ходе ноги вниз (цифра Ц4).
Цифра Ц1 это цифра X1 +3%.
Цифра Ц2 это цифра X2 +3%.
Цифра Ц3 это цифра X3 +3%.
Цифра Ц4 это цифра X4 +3%.
Минимальную силу срабатывания привода Ц1 и Ц2 корректирует сигнал датчиков углов руки двумя синусно-косинусными уравнениями от вертикали, чтоб рука не чувствовала вес экзоскелета руки.
Минимальную силу срабатывания привода Ц3 и Ц4 корректирует сигнал датчиков углов ноги двумя синусно-косинусными уравнениями от вертикали, чтоб нога не чувствовала вес экзоскелета ноги.
Минимальную силу срабатывания привода в каждом датчике таблицы решений обратной связи корректируют по X1, X2, X3, X4. Человек Виртуальной системой управления выбирает алгоритм, цифры таблиц решений датчиков
КОМПЕНСАЦИЯ ИНЕРЦИИ ЭКЗОСКЕЛЕТА
1. инерцию экзоскелета компенсирует обратная связь приводов с 3D-датчиками ускорений в экзоскелетах рук, ног.
Компенсация по таблице решений
«ускорение – дополнительная процентная сила на тросе привода».
В настройках человек уточнит цифры таблиц
2. момент инерции экзоскелета с 3D-карданом привод компенсирует по разности момента инерции «человек + экзоскелет + 3D-кардан» и момента инерции без человека по таблице
«положение рук, ног экзоскелета – сила тока муфт сцепления».
Разность момента с таблиц решений
«угловое ускорение – сила тока муфт сцепления»
3. чем больше ускорение в датчиках рук и ног экзоскелета, тем больше быстродействие привода в диапазоне малых сил датчиков силы экзоскелета
4. центробежную силу привод компенсирует таблицами решений «центробежная сила – процентная сила привода компенсирующая центробежную силу экзоскелетов рук, ног»
ТОЧНОСТЬ, БЫСТРОДЕЙСТВИЕ ПРИВОДОВ ЭКЗОСКЕЛЕТА
Чувствительность привода экзоскелета к движениям человека растет при росте угловой скорости, рассогласования углов, скорости роста силы.
1. небольшие угловые скорости в диапазоне малых сил, малый угол рассогласования – малая чувствительность привода к движениям человека. Движения андроида точные из-за большого процентного роста силы человека для малого перемещения рук, пальцев андроида. Большое взаимное противодействие приводов сгибателей, разгибателей экзоскелета. Аналогично работают приводы сгибателей, разгибателей андроида.
В настройках алгоритмы зависимости процентного роста силы от сигнала обратной связи
2. большие угловые скорости, большие углы рассогласования – большая чувствительность привода к движениям человека. Большая сила, быстродействие андроида из-за малого процентного роста силы человека при управлении андроидом. Приводы сгибателей, разгибателей экзоскелета работают в малой противофазе
3. большие скорости роста силы, большая сила – большая чувствительность привода к движениям человека. Большая сила, быстродействие андроида из-за малого процентного роста силы человека при управлении андроидом. Приводы сгибателей, разгибателей экзоскелета работают в малой противофазе
4. установки алгоритмов чувствительности привода к движениям человека по профессиям и технологическим операциям
Виртуальной системой управления выбирают:
1. раздельное в каждом шарнире соотношение углов «человек – андроид» для более точной работы
2. порог чувствительности силовой обратной связи
3. внутреннее трение силовой обратной связи
4. коэффициент усиления силовой обратной связи
5. график усиления силовой обратной связи
6. цифры алгоритма «больше ускорение передает человек – меньше коэффициент усиления силы от внешней среды»
7. цифры алгоритма «больше скорость передаваемая человеком – меньше коэффициент усиления силы от внешней среды»
8. цифры алгоритма «силы человека, внешней среды направлены в одну сторону – чем больше сила внешней среды, тем меньше коэффициент её усиления»
КОЭФФИЦИЕНТ УСИЛЕНИЯ ПРИВОДА ЭКЗОСКЕЛЕТА
При движении локтя с кистью вверх усиление привода больше, чем при движении локтя с кистью вниз. 3D-датчики ускорения в нижней части предплечья, в нижней части локтя, в нижней части бедра, в нижней части голени. Обратная связь привода с 3D-датчиком ускорений по табличному коэффициенту усиления привода
При движении 3D-датчиков ускорения вниз их цифры уменьшаются на цифру ускорения свободного падения, при движении вверх цифры увеличиваются на цифру ускорения свободного падения.
Софт сложив 3 вектора 3D-датчика ускорения найдет проекцию суммарного вектора на вертикаль в вычислениях коэффициента усиления привода. Проекция на вертикаль – это ускорение в вертикальной оси. Вертикаль дает датчик наклона туловища андроида. Виртуальной системой управления человек настроит коэффициенты усиления привода
Коэффициент усиления привода = Y если нет движения центра масс локтя с кистью (предплечья) вверх или вниз в проекции ускорения на вертикаль
Коэффициент усиления привода > Y если есть движение центра масс масс локтя с кистью (предплечья) вверх в проекции ускорения на вертикаль
Коэффициент усиления привода < Y если есть движение центра масс локтя с кистью (предплечья) масс вниз в проекции ускорения на вертикаль
Вес экзоскелетов рук, ног компенсируют пружины для быстродействия. С цифр обратной связи привод вычитает цифру датчика силы пружины по синусам 2-х углов наклона экзоскелетов рук, ног к вертикали
Вес рук, ног экзоскелета приводом компенсирует таблица решений «угол руки (ноги, туловища от вертикали) – компенсирующие процентные силы в тросах».
Прогрессивное усиление точно дозирует малую силу, поднимет тяжелый груз.
Андроид поднимает до 4кг – усиление 1
поднимает десятки килограммов – усиление 2-5 по вертикали,
1,1 по горизонтали в направлении действия сгибателей-разгибателей руки,
1,3 по горизонтали в движении вытянутой руки вбок
На торможение груза по горизонтали усиление вдвое больше, чем на разгон. На торможение груза двигающегося вниз усиление в разы больше, чем вверх. Быстрый рост коэффициента усиления привода до максимума у границы предельного поднимаемого андроидом веса.
По умолчанию (установки) коэффициент усиления безымянного пальца на 50% больше остальных пальцев: экзоскелета мизинца нет. У андроида может быть 5 пальцев – мизинец, безымянный палец двигаются по одинаковому алгоритму
РЕЖИМ ОГРАНИЧЕНИЕ СИЛЫ ПРИЖИМА АНДРОИДА по 3 осям координат пространства – человек Виртуальной системой управления ставит ограничение силы прижима андроидом кисти, карандаша, инструмента к поверхности.
РЕЖИМ СКОРОСТЬ РОСТА СИЛЫ АНДРОИДА – человек устанавливает скорость роста силы инструмента андроида не больше X% от последнего заранее зафиксированного значения скорости роста силы в руках человека. Приводы не допустят скорости роста силы рук андроида больше X%
АЛГОРИТМ АНДРОИДА «ЗАХВАТ ПРЕДМЕТА – РАЗЖИМАНИЕ ЗАХВАТА»
При захвате предмета руками (кистью) алгоритм держит постоянной силу захвата предмета, чтоб не выпал с рук андроида. Для разжимания предмета человеку-оператору нужна сила разжимания направленная в противоположную сторону. Сила разжимания в алгоритме андроида по умолчанию равна 20-50% силы захвата.
При разжимании предмета скорость уменьшения силы захвата предмета алгоритм берет с таблиц решений «сила сжатия – угол вектора силы к вертикали – скорость уменьшения силы захвата». Сила разжимания разная для стационарных, мобильных предметов. Аналогичен Алгоритм «захват кистью – разжимание кисти андроида-альпиниста». Колесиками Виртуальной системы управления человек установит в процентах силу разжимания и скорость уменьшения силы.
Софт приводов кисти андроида в упоре об поверхность или захвате предмета уравнивает значения сил датчиков пальцев. Пока человек усилием больше Критического процентного усиления (установки) не усилит отдельный палец.
ЗАДЕРЖКА УПРАВЛЕНИЯ АНДРОИДОМ равна времени задержки управления приводами костюма телеприсутствия при передаче человеком сигнала андроиду + время передачи сигнала по линии связи к андроиду + время отработки сигнала человека приводами андроида + время передачи сигнала о выполненном движении по линии связи от андроида к человеку + время отработки приводами костюма телеприсутствия сигнала от андроида.
Задержка управления андроидом равна удвоенному времени передачи сигнала в одну сторону + удвоенное время работы приводов костюма телеприсутствия + время отработки сигнала приводами андроида.
0,02сек – задержка управления магнитореологической муфтой сцепления быстродействующего электропривода японского андроида Asimo. На 6000км от костюма телеприсутствия до андроида суммарное время двукратного прохода лазерного сигнала (радиосигнала) обратной связи 0,04сек + две задержки управления приводами костюма телеприсутствия по 0,02сек + задержка управления приводами андроида 0,02сек. Итого общее время задержки управления андроидом 0,1сек на расстоянии 6000км.
Задержка не больше 0,1сек – не нужно обучать работе в костюме телеприсутствия. Задержку снизит бессерверная обратная связь. Реакция мозга человека ~0,1сек – 10Hz средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека. 6000км – радиус управления андроидом по прямому лучу. Сигнал по кабелям – радиус управления андроидом ~2500км.
Для уменьшения задержки управления человек Виртуальной системой управления выбирает алгоритмы упругости движений андроида: дают плавность приземления, безопасное касание андроидом объектов. Алгоритмы упругости движений рук, ног, туловища андроида дают:
1. безопасное падение андроида на стоящих рядом людей
2. снижают вероятность повреждения андроида при падениях, столкновениях
КАЛИБРОВКА УГЛОВ ЭКЗОСКЕЛЕТА
Софт калибрует таблицами решений процентные углы рук, ног андроида и экзоскелета по принципу:
Руки, ноги, пальцы андроида касаются частей его тела чуть раньше рук, ног, пальцев человека.
Датчики углов экзоскелета дублируют ультрафиолетовые (у них нет помех) фотоэлементы, светодиоды. Яркость светодиодов в обратной связи с пороговым током фотоэлемента. Светодиоды излучают импульс поочередно с частотой 2000Hz.
Координаты измерительных точек экзоскелета – по времени пролёта импульса до 3-х фотоэлементов минус задержка излучения импульса светодиодом, минус задержка приема импульса фотоэлементом. По расстояниям «светодиод – фотоэлемент» софт калибрует углы экзоскелета.
В экзоскелете правого бедра спереди снизу справа светодиод для передних поясных фотоэлементов экзоскелета туловища. В экзоскелете правой голени снизу справа светодиод для правых поясных фотоэлементов.
В носке экзоскелета правой ступни справа светодиод для фотоэлемента экзоскелета голени. В экзоскелете правого бедра сверху сбоку справа 2 светодиода спереди, сзади для правых фотоэлементов пояса.
2 фотоэлемента по бокам спереди пояса, ниже верхнего шарнира локтя. 2 фотоэлемента по бокам сзади пояса, ниже верхнего шарнира локтя Экзоскелета датчикового. 2 фотоэлемента спереди в правом, левом плече.
Углы фаланг-1 пальцев измеряет магнитная головка по перемещению тяги фаланги-1. Магнитная головка с последовательными зазорами и током подмагничивания переменной частоты считывает код угла с неподвижной тяги
СИНХРОНИЗАЦИЯ КОСТЮМОВ ТЕЛЕПРИСУТСТВИЯ РАЗНЫХ ФИРМ С АНДРОИДАМИ:
1. цифры силовой и тактильной обратной связи в процентах
2. стандарт нижнего и верхнего порога сил силовой, тактильной обратной связи
3. стандарт крайних углов пальцев, рук, ног, таза
4. таблица решений (по точкам зажима рук, ног) «кинематика костюма телеприсутствия – кинематика андроида»
5. база системы координат ладони и экзоперчатки – продольная ось указательного пальца на тыльной поверхности ладони.
Начало координат костюма телеприсутствия – проекция точки-В на виртуальный пол. Точка-В – центр между точками-L-R.
Точка-L – центр шарнира левого плеча.
Точка-R – центр шарнира правого плеча.
База координат ног – проекция центра масс андроида на виртуальный пол.
Точка-L2 – опорный центр левой ступни.
Точка-R2 – опорный центр правой ступни.
Софт двигая руками, ногами человека запишет стандартные точки соприкосновения рук, ног человека; длину рук, ног, туловища. Файл личных настроек по международным стандартам костюма виртуальной реальности в Метавселенных.
Дальность, угловое расположение кистей андроида относительно телекамер софт по умолчанию передает равными дальности и угловому расположению кистей человека относительно глаз человека. Виртуальная система управления этим алгоритмом
Требования к андроидам управляемым через костюм телеприсутствия:
1. тазобедренный балансир с продольно-горизонтальной и вертикальной поворотными осями центра балансира убирает реактивные моменты тела в ходьбе и беге, снижая расход энергии
2. прогрессивная подвеска ступни как в подвеске заднего колеса кроссового мотоцикла. Носок, пятка ступни желательно по схеме «Цепной зажим равномерного прижима» для максимальной площади контакта ступни и снижения износа упругой подошвы с большим коэффициентом трения на мокрой, ледяной поверхности
3. пружины приводов рук, ног компенсируют силу тяжести, снижая расход энергии
4. защита от падения андроида: библиотека таблиц решений алгоритмов стандартных движений, связок между ними:
таблица решений «моменты инерции туловища андроида в координатах XYZ привязаных к центру масс андроида – сила от привода – углы конечностей»
таблица решений «линейная инерция туловища андроида в координатах XYZ привязаных к центру масс андроида – сила от привода – углы конечностей»...
5. защита людей от столкновения с андроидом: библиотека таблиц решений упругости движений рук, ног, туловища андроида
ЭКОНОМИЯ ЭНЕРГИИ АНДРОИДА
1. для регенерации электроэнергии софт коммутирует секции обмоток электромотора и муфт сцепления силовыми транзисторами, меняя индуктивное сопротивление. В режиме регенерации трехфазная обмотка электромотора работает как одна общая однофазная обмотка с повышенным числом витков. В режиме регенерации электроэнергию одни электромоторы и муфты сцепления перекачивают в другие, используя их индуктивность накопителем энергии
2. для экономии энергии по таблицам решений приводы дергают тросы сильнее сигнала. Затем трос двигает упругое сокращение его длины
3. шаблонные движения андроида: скорость изменения углов разных шарниров не совпадает с шаблоном – софт добавит энергию приводу отстающему по углу
4. тазобедренный балансир с продольно-горизонтальной и вертикальной поворотными осями центра балансира убирает реактивные моменты тела в ходьбе и беге, снижая расход энергии
5. для экономии энергии носок, пятка ступни по схеме «Цепной зажим равномерного прижима». Эта схема при разгоне, торможении андроида увеличивает площадь опоры ступни в любой стадии приземления, толчка. Прогрессивная подвеска пружины ступни как в подвеске заднего колеса кроссового мотоцикла
6. пружины приводов рук, ног компенсируют силу тяжести, снижая расход энергии. Медленный легкий винтовой привод регулирует силу пружин
7. КПД преобразования химической энергии в механическую: человек 25%, андроид 70%. Андроид тратит энергию в разы меньше человека с такой же рабочей мощностью
ЭКЗОСКЕЛЕТ РУКИ
Экзоскелет руки сбоку руки – можно сидя на полу опереться локтями об колени. Экзоскелет руки это Экзоскелет привода руки + Экзоскелет датчиковый руки.
Экзоскелет датчиковый зажимает руку человека, имеет датчики сил и углов, соединен 2D-шарниром с экзоскелетом туловища.
Экзоскелет датчиковый по цифрам датчиков силы винтовыми приводами устанавливает длину экзоскелетов предплечья, локтя, кисти, ширину плеч экзоскелета туловища. Датчики силы 3-кратно дублированы.
Экзоскелет привода руки снаружи сбоку от Экзоскелет датчиковый, соединен 2D-шарниром с экзоскелетом туловища. В 2D-шарнире шкивы с тросами идущими с Модуля группового привода (за спиной человека).
Экзоскелет привода руки передает все силы привода Экзоскелету датчиковому.
Экзоскелет привода руки имеет СИСТЕМУ КОМПЕНСАЦИИ ВЕСА, ИНЕРЦИИ, учитывающую вес и инерцию Экзоскелета датчикового.
Экзоскелет датчиковый локтя имеет регулировочный винтовой привод регулировки его длины.
Экзоскелет датчиковый предплечья имеет регулировочный винтовой привод регулировки его длины.
При уменьшении длины Экзоскелета датчикового локтя, нижняя его часть идет вверх снаружи направляющей трубы-Л.
Труба-Л – это продольная силовая рама Экзоскелета датчикового локтя.
При уменьшении длины Экзоскелета датчикового предплечья, нижняя его часть идет вверх снаружи направляющей трубы-П.
Труба-П – это продольная силовая рама Экзоскелета датчикового предплечья.
В Экзоскелете датчиковом локтя есть только верхний зажим локтя, который может вращаться снаружи трубы-Л.
Экзоскелет датчиковый локтя соединен с Экзоскелетом датчиковым предплечья 2D-карданом-ЛП. Нижний зажим экзоскелета предплечья вращается на трубе-П, соединяющей 2D-кардан-ЛП с экзоскелетом туловища.
Верхнего зажима предплечья человека нет. Вместо него плечевой зажим равномерного прижима. Плечевой зажим поворачивается на поперечной горизонтальной плечевой оси-ПО. Плечевая ось-ПО закреплена над плечами в экзоскелете туловища.
На старте плечевой зажим включается после окончания регулировки длины экзоскелета туловища. Плечевой зажим оборачивается вокруг плеча сверху вниз, зажимая плечо. Длину плечевого зажима устанавливает регулировочный винтовой привод сзади экзоскелета туловища.
Сильные длиноходные пружины толкают верхний зажим экзоскелета локтя и нижний зажим экзоскелета предплечья к 2D-кардану-ЛП, соединяющего Экзоскелет датчиковый локтя с Экзоскелетом датчиковым предплечья. На одной оси с сильными длиноходными пружинами есть с противоположной стороны зажимов слабые короткоходные пружины. Слабые пружины противодействуют сильным пружинам.
Верхний зажим экзоскелета локтя может двигаться снаружи вдоль трубы-Л. Движения верхнего зажима экзоскелета локтя снизу ограничивает сильная длиноходная пружина-Л1. Движение вверх ограничивает слабая короткоходная пружина-Л2.
Нижний зажим экзоскелета предплечья может двигаться снаружи вдоль трубы-П. Движения нижнего зажима экзоскелета предплечья сверху ограничивает сильная длиноходная пружина-П1. Движение вниз ограничивает слабая короткоходная пружина-П2.
Движения зажимов локтя и предплечья в пружинах-Л1-Л2-П1-П2 по трубам-Л-П совмещают ось верхнего сустава локтя человека с осью верхнего шарнира экзоскелета локтя в любых движениях. Групповой привод дает экзоскелету руки только моменты, углы
Верхняя часть Экзоскелета датчикового локтя шарнирной тягой длиной 23см соединена с верхней частью Экзоскелета привода локтя.
ЭКЗОСКЕЛЕТА ДАТЧИКОВОГО руки движения отличаются от движений ЭКЗОСКЕЛЕТА ПРИВОДА руки. Человек это не чувствует от того что:
1. обратная связь идет только с Экзоскелета датчикового
2. нет степеней свободы локтя, предплечья без обратной связи с рукой андроида.
С модуля группового привода за спиной экзоскелета в каждую экзоперчатку идут по шкивам Экзоскелета привода правой руки 12 силовых тросов пальцев. С шкивов 2D-шарнира плеча 12 тросов идут в шкивы оси-1 3D-шарнир-ЛП.
В Экзоскелете привода руки локоть с предплечьем соединяет 3D-шарнир-ЛП с шкивами. Ось-1 поперечная горизонтальная.
С шкивов оси-1 тросы идут в шкивы оси-2. Ось-2 сзади предплечья, всегда параллельна продольной оси предплечья.
С шкивов оси-2 тросы идут в шкивы оси-3. С шкивов оси-3 тросы идут в вертикальную ось-В 3D-шарнира экзоскелета ладони.
ЭКЗОСКЕЛЕТ ПРАВОЙ ЛАДОНИ
В описаниях ниже правая экзоперчатка: тыльная сторона ладони направлена вниз, пальцы направлены вперед, плоскость ладони горизонтальна. В экзоскелете правой ладони управляющая пальцами поперечная горизонтальная ось-ПГ с шкивами для тросовых тяг пальцев, проходит над серединой экзоскелета ладони. 12 шкивов управляют 4 пальцами кисти и положением кисти.
Большой палец: 2 шкива-БП1-БП2 у мизинца тросовыми тягами через угловые рычаги двигают большим пальцем.
С оси-ПГ через расположенные конусом шкивы, тросы переходят на продольную горизонтальную ось-ПРГ.
С оси-ПРГ через расположенные конусом шкивы, тросы переходят на вертикальную ось-В. Далее 12 тросов идут вверх через Экзоскелет привода правой руки в Модуль группового привода.
НА СТАРТЕ привод правой экзоперчатки поворачивает влево ладонь (ладонь в вертикальной плоскости). Регулировочный винтовой привод устанавливает длину экзоскелета ладони по нижнему суставу локтя и длину экзоскелета согнутого локтя. Приводы экзоскелета зажимают ладонь, локоть у верхнего сустава
Установка длины экзоскелета локтя
Привод сгибает экзоскелет ладони на угол 64° к продольной оси локтя. Локоть согнут под углом 90°. По цифре датчика силы сзади нижнего сустава предплечья, регулировочный винтовой привод установит длину экзоскелета локтя, зажмёт локоть у его верхнего сустава. Вместо зажима нижнего сустава локтя – зажим кисти + тяга соединяющая 3D-шарнир кисти с зажимной рамой нижнего сустава предплечья.
Зажим зажимает предплечье человека только у нижнего сустава. Зажима верхнего сустава нет. Экзоскелет отводит руку человека назад на угол до 45° от вертикали
ЭКЗОСКЕЛЕТ НОГИ
Меняя длину экзоскелета бедра винтовой привод двигает в линейных направляющих коленный шарнир с шкивами к оси верхнего шарнира бедра. Это увеличивает длину троса (в каждом шкиве), который дополнительно наматывается на тянущий шкив-ТТ муфты сцепления группового привода. Аналогичны регулировки длины голени, предплечья.
Экзоскелет датчиковый сзади ноги человека чтоб не цеплять экзоскелеты рук. 14 тросов вращают шкивы центральной вертикальной оси экзоскелета таза, идут в тазобедренный балансир экзоскелета.
К Экзоскелету датчиковому ноги через параллелограммный шарнирный механизм присоединен сзади Экзоскелет привода ноги.
Экзоскелет датчиковый голени и Экзоскелет привода голени имеют общий винтовой привод настройки длины экзоскелета голени.
Общий винтовой привод расположен в Экзоскелет датчиковый.
Экзоскелет датчиковый бедра и Экзоскелет привода бедра имеют общий винтовой привод настройки длины экзоскелета бедра.
Общий винтовой привод расположен в Экзоскелет датчиковый.
При уменьшении длины Экзоскелета датчикового голени, нижняя его часть идет вверх снаружи направляющей-Л.
Направляющая-Л – это продольная силовая рама Экзоскелета датчикового голени.
При уменьшении длины Экзоскелета датчикового бедра, нижняя его часть идет вверх снаружи направляющей-Б.
Направляющая-Б – это продольная силовая рама Экзоскелета датчикового бедра.
Нижний зажим экзоскелета голени зажимает её над голеностопным суставом, верхний зажим – под коленом.
Верхний зажим экзоскелета голени закреплен в Экзоскелете датчиковом голени.
Упор коленом об землю: вертикальную нагрузку держит верхний зажим голени.
Нижний зажим экзоскелета бедра зажимает бедро у нижнего сустава.
Вместо верхнего зажима бедра – тяга соединяющая зажим бедра у нижнего сустава с экзоскелетом таза.
Экзоскелет датчиковый голени соединен с Экзоскелетом датчиковым бедра поперечной горизонтальной шарнирной осью-ГБ. Шарнирная ось-ГБ – сзади колена человека.
Сильные длиноходные пружины толкают верхний зажим экзоскелета голени и нижний зажим экзоскелета бедра к шарнирной оси-ГБ, соединяющей Экзоскелет датчиковый голени с Экзоскелетом датчиковым бедра. На одной оси с сильными длиноходными пружинами есть с противоположной стороны зажимов слабые короткоходные пружины. Слабые пружины противодействуют сильным пружинам.
Верхний зажим экзоскелета голени может двигаться снаружи вдоль направляющей-Г. Движения верхнего зажима экзоскелета голени снизу ограничивает сильная длиноходная пружина-Г1. Движение вверх ограничивает слабая короткоходная пружина-Г2.
Нижний зажим экзоскелета бедра может двигаться снаружи вдоль трубы-Б. Движения нижнего зажима экзоскелета бедра сверху ограничивает сильная длиноходная пружина-Б1. Движение вниз ограничивает слабая короткоходная пружина-Б2.
Движения зажимов голени и бедра в пружинах-Г1-Г2-Б1-Б2 по направляющим-Г-Б совмещают ось верхнего сустава голени человека с шарнирной осью-ГБ верхнего шарнира экзоскелета голени в любых движениях. Групповой привод дает экзоскелету ноги только моменты, углы
Экзоскелет бедра шарниром соединен с экзоскелетом таза шкив-тросовым механизмом: выполнит вертикальный, горизонтальный, поперечный шпагат. Рычажная система экзоскелетов ног сзади ног человека, не выступая по бокам ног. Человек может сидя на полу согнуть колени на угол 150°.
Экзоскелет ноги под коленом, над коленом балансирным механизмом соединен тягой-Т сзади с нижней боковой частью экзоскелета таза. Тяга-Т – невращающаяся нижняя труба-Т1 + верхняя труба-Т2. Труба-Т1 больше трубы-Т2 по диаметру, имеет сверху гайку-Т. Труба-Т2 – вращающийся винт с прямоугольной резьбой, вкручиваемый в гайку-Т.
На старте тяга-Т2 вращаясь в резьбе подгонит длину тяги-Т под длину бедра человека, пока в колено не упрется датчик силы и выключит вращение тяги-Т2
Тазобедренный балансир нужен андроиду для:
1. движения по лестницам и ходьбы ровными ногами
2. убирает реактивные моменты тела в ходьбе, беге
Экзоскелет таза – аналог тазобедренного балансира андроида. Соединен с экзоскелетом туловища 3D-шарниром таза.
Экзоскелет таза через шкивы 3D-шарнира таза тросами соединен с поперечным горизонтальным валом-НН группового привода. Силы тросов 3D-шарнира таза рассредоточенно прикладываются к позвоночнику человека без перегрузки отдельных позвонков
Седло экзоскелета таза поворачивается в вертикальной оси, наклоны право-лево. Седло малой стандартной силой привод прижимает к человеку. Алгоритмы привода седла не снимают вес человека с ступней, если:
1. андроид едет на мотоцикле (автомобиле) – привод седла переносит большую часть веса человека на седло по соотношению веса андроида к суммарной силе датчиков его ступней
2. в прыжке андроида на мотоцикле в туловище андроида 3D-датчик ускорений при невесомости обнуляет виртуальный (по сигналам других датчиков) 3D-датчик силы седла
ЭКЗОСКЕЛЕТ СТУПНИ
Регулировочный винтовой привод датчиками силы ступни установит длину экзоскелета голени, прижмёт к ступне башмак. Башмак зажимает ступню сверху, по бокам. Голень зажимает зажим её нижнего сустава.
АНДРОИДА СТУПНЯ
имеет продольную горизонтальную ось-трубу-С, на которой раздельно поворачиваются пятка и носок ступни для автоматической ориентации плоскости подошвы пятки и носка ступни по рельефу опоры на земле. Это уменьшает нагрузку тросов
СТАРТ
спиной к экзоскелету туловища человек садится в седло экзоскелета таза, в горизонтально расположенные экзоскелеты бедер. Ставит локти в горизонтальные экзоскелеты локтей, кнопкой включает костюм телеприсутствия. Человека зажимают зажимы экзоскелета, в экране слова: Аватар готов
ЭКЗОПЕРЧАТКА
Экзоперчатка из высокомодульной высокопрочной легированной стали с покрытием с износостойкого сплава серебра против бактерий. Сплав теплопроводный – руки не потеют. Экзоскелеты пальцев-1-2-3 в поперечных направляющих передней части экзоперчатки. В описании правая экзоперчатка: тыльная сторона ладони направлена вниз, пальцы направлены вперед, плоскость ладони горизонтальна.
Палец-1 – указательный палец.
Палец-2 – средний палец.
Палец-3 – безымянный палец.
Экзоскелета мизинца нет
Боковые движения пальцев
Палец-1 – это для глаз человека базовая (шкала отсчета размеров, углов) опорная измерительная поверхность при изготовлении, сборке андроидом мелких точных механизмов типа наручных часов или пайки микросхем. В пальце-1 до задней части ладони сверху, снизу, сбоку нарисована сантиметровая линейка одной полосой для измерения длины предметов.
Человек управляет пальцами в интуитивной системе координат кисти: продольная ось указательного пальца лежит в плоскости ладони. Начало координат – основание указательного пальца. Для угловой точности базовой поверхности палец-1 не поворачивается вбок + минимальные зазоры шарниров.
Пальцы-2-3 одновременно одним тросом-П поворачиваются вправо вбок от пальца-1 – углы между пальцами-1-2-3 всегда равны. Тросом-П общая пружина разводит пальцы. Сводит вместе пальцы-1-2-3 силовой трос группового привода.
Сгибает пальцы-1-2-3 силовой трос группового привода. Разгибает пальцы-1-2-3 общий трос с приводом от пружины.
В пальцах-1-2-3 сначала от корня пальца идет шарнир-Г (с тросами, шкивами) с горизонтальной осью, затем спереди него шарнир-В (с тросами, шкивами) с вертикальной осью. В шарнирах-Г-В оси перпендикулярны продольной оси пальца. В пальце-1 шарнира-В нет
Экзоскелет фаланги-1 двигает Модуль группового привода тягой-ПТВ (сгибатель) и общим тросом-ТПВ (разгибатель).
Экзоскелеты фаланг-2-3 двигает Модуль группового привода общей тягой-ПТВ, общим тросом-ТПВ. Экзоскелеты фаланг-2-3 имеют общие тросы (тяги) как и у человека
СТАРТОВОЕ ПОЛОЖЕНИЕ ЧЕЛОВЕКА В КОСТЮМЕ ТЕЛЕПРИСУТСТВИЯ
Человек садится на экзоскелеты бедер. Спина вертикальна. Суставы рук, ног в одной вертикальной плоскости, согнуты на угол 88-90° чтоб по суставам регулировочные винтовые приводы установили длину экзоскелетов бедра, голени, локтя, предплечья. Регулировочные винтовые электроприводы подгоняют экзоскелет к человеку не участвуя дальше в работе экзоскелета
Винтовые приводы: винты из труб с твердой высокомодульной легированой стали. Резьба трубы вырезана алмазным кругом, покрыта нитридом титана, обработана ультразвуком в жидком легкоплавком медном сплаве заполняющим хрупкий пористый каркас из нитрида титана. Потом шлифовка профиля резьбы алмазным кругом с мелким зерном
Резьба прямоугольная или упорная с максимальным диаметром резьбы для роста КПД через уменьшение угла подъема резьбы и увеличение упорной поверхности резьбы. Упорная поверхность резьбы перпендикулярна оси винта для максимума КПД, ресурса привода
ЦЕПНОЙ ЗАЖИМ РАВНОМЕРНОГО ПРИЖИМА
Продольные рычаг-звенья-1-2-3-4-5 цепного зажима равномерного прижима зажмут руку, ногу, туловище человека до стандарта силы в общей тяге. Тяга-ПТВ продольного рычаг-звена-1 толкает поперечный рычаг-1П имеющий большое плечо рычага силы. Рычаг-1П под углом 90° соединен с рычаг-звеном-1.
С рычаг-звеном-2 под углом 90° соединен поперечный рычаг-2П. У поперечного рычага-2П плечо рычага силы меньше во столько раз, во сколько суммарная длина рычаг-звеньев-1-2 больше длины рычаг-звена-1.
Аналогичное отношение общей длины к длине поперечных рычагов-3П-4П-5П дает одинаковую силу прижима каждого рычаг-звена цепного зажима к руке (ноге) одной общей тягой-ПТВ, последовательно толкающей все остальные тяги. Это свойство сохраняется на всех звеньях и при разжимании цепного зажима равномерного прижима.
Разжимает рычаг-звенья пружина через трос-ПТВ последовательно проходящий через секторные шкивы в поперечных рычагах-1П-2П-3П-4П-5П. Цепной зажим равномерного прижима с равной силой зажимает все точки обхватываемой поверхности любой формы.
Регулировочный винтовой привод двигает общий трос через пружинный рычажный механизм с прогрессивной характеристикой (типа задней подвески кроссового мотоцикла) силы прижима
В стартовом положении экзоскелеты пальцев-1-2-3 горизонтально ровно вытянуты вперед в одной вертикальной плоскости. Продольная ось выпрямленного экзоскелета большого пальца параллельна остальным пальцам
Экзоскелет пальца это:
1. шарниры-НО (нижняя ось)
2. шарнир-СО (средняя ось)
3. шарнир-ВО (верхняя ось)
4. боковые рычаги-БР (боковой рычаг)
5. тросовая тяга-ПТВ (продольная тяга верхняя) сгибает все фаланги экзоскелета пальца
6. трос-ТПВ (трос продольный верхний) разгибает все фаланги экзоскелета пальца
7. тяга-Р1 (регулировочная тяга)
8. тяга-Р2
9. угловые рычаги-Р (регулировочный рычаг)
10. наперсток
Тросовая тяга-ПТВ работая в небольшой противофазе с тросом-ТПВ убирает зазоры, упругие деформации. Трос-ТПВ идет по секторным шкивам
Привод тросовой тяги-ПТВ: тросовая тяга-ПТВ расположена над ладонью человека. Передняя часть тросовой тяги-ПТВ шарниром соединена с задним верхним шарниром фаланги-1 пальца. Задняя часть тросовой тяги-ПТВ проходит своим продольным вырезом снаружи неподвижной поперечной горизонтальной трубки-Н. Трубка-Н это направляющая задней части тросовой тяги-ПТВ.
В середине задней половины направляющей-ПТВ шкив-ПТВ с тросом-ПТВ. Трос-ПТВ в своей середине закреплен в верхней точке шкива-ПТВ. Трос-ПТВ делает оборот по шкиву-ПТВ и выходит снизу него передним концом к пальцу. Передний конец троса-ПТВ закреплен в переднем конце тросовой тяги-ПТВ. Задний конец троса-ПТВ закреплен в заднем конце тросовой тяги-ПТВ.
При повороте шкива-ПТВ задний конец троса-ПТВ тянет тросовую тягу-ПТВ вперед к пальцу – палец сгибается.
Трос-ТПВ всегда убирая все зазоры, разгибает палец
У экзоскелета пальца по всей длине нижние шарниры-НО на которые опирается нижняя тыльная поверхность пальца человека. Шарниры-НО соединены продольными рычагами-ПР. Рычаги-ПР перпендикулярны осям шарниров-НО.
Боковые рычаги-БР обжимают палец справа, слева. Рычаги-БР перпендикулярны продольной оси вытянутого пальца.
Ось шарнира-НО приварена к боковому рычагу-БР, приваренного к оси верхнего шарнира-ВО. Оси шарниров-ВО располагаются над верхней поверхностью пальца, параллельно осям-шарниров-НО. Чем дальше рычаг-БР расположен от первого (у ладони) шарнира экзоскелета фаланги-1 пальца, тем он короче. Оси шарниров-ВО не касаются верхней поверхности пальца.
Оси шарниров-ВО соединены между собой верхними продольными тягами-ПТВ
Тактильные датчики шарниров-Н прижимаются к тыльной стороне пальца. Силу прижима тактильных датчиков к пальцу общей пружиной, человек настраивает колесиком винта экзоперчатки. В тыльной стороне пальцев тактильные силовые (магнитострикционные, многослойные пьезоэлектрические), тепловые пиксели
МЕХАНИЗМ УМЕНЬШЕНИЯ ШИРИНЫ ЭКЗОСКЕЛЕТА ПАЛЬЦА
Цепной зажим равномерного прижима фаланги-2 шарнирами и продольными тягами соединен с наперстком и экзоскелетом фаланги-1. У звена цепного зажима по высоте пальца оси-ВО-СО-НО в боковым рычаге-БР.
Ось-ВО – верхняя ось шарнира, диаметр 3мм.
Ось-СО – средняя ось шарнира, диаметр 10мм.
Ось-НО – нижняя ось шарнира, диаметр 3мм.
Оси-ВО-СО-НО состоят из оси, на которой снаружи насажена с малым зазором ось-трубка (соосная общая ось шарнира).
Оси-НО-ВО – диаметр 3мм.
Ось-СО – прямоугольная резьба. Винт (ось-Р), неподвижные гайки-Л-П для уменьшения зазоров резьбы сделаны из материалов с нулевым температурным расширением при комнатных температурах. Ось-СО состоит из:
1. в центральной оси-Р слева левая резьба, в центре шкив-Р регулировочного троса-Р, справа правая резьба
2. в левой половине оси-Р с прямоугольной внутренней левой резьбой неподвижная гайка-Л
3. в правой половине оси-Р с прямоугольной внутренней правой резьбой неподвижная гайка-П
В центральной оси-Р шкив-Р, в котором в 1 точке закреплен регулировочный трос-Р. Концы троса-Р обернуты на 2 оборота вокруг шкива-Р.
Если тянуть конец-1 троса-Р, шкив-Р делает 2 оборота по часовой стрелке.
Если тянуть конец-2 троса-Р, шкив-Р делает 2 оборота против часовой стрелки.
Двигая одним или другим концом троса-Р регулировочный винтовой привод осями-СО меняет ширину экзоскелета пальца. Одновременно тяги-Р1-Р2 пропорционально уменьшают высоту экзоскелета пальца. При уменьшении бокового расстояния между пальцами – пальцы-2-3 двигаются вдоль одной оси к пальцу-1
Тросы-Р идут в экзоперчатку по шкивам-Р на всех осях-СО.
Тросы по шкивам-Р идут параллельно, не скрещиваясь к винтовому приводу уменьшающему ширину экзоскелета пальца.
Тросы идущие в следующий шкив-Р делают вокруг него 1 оборот чтоб трос не сошел с шкива.
Концы тросов-Р соединены с регулировочными тягами-Р1-Р2. Регулировочные тяги-Р1-Р2 двигаются в рычагах-Р, вращающихся в осях шарниров-ВО. Рычаги-Р1-Р2 вращаются снизу шарниров-ВО
В описаниях ниже правая экзоперчатка: тыльная сторона ладони направлена вниз, пальцы направлены вперед, плоскость ладони горизонтальна. В фалангах-1 пальцев-1-2-3 правый и левый датчики боковой силы пальца. Вставляя пальцы в правую экзоперчатку человек нажимает пальцами-1-2-3 правые или левые датчики боковой силы пальца. Их сигналы регулировочным винтовым приводом устанавливают боковое расстояние между пальцами. Софт находит какие тактильные пиксели андроида идут в фаланги-1-2-3 экзоскелета
МЕХАНИЗМ УМЕНЬШЕНИЯ ВЫСОТЫ ЭКЗОСКЕЛЕТА ПАЛЬЦА
Регулировочные тяги-Р1-Р2 через рычаги-Р их поперечными осями-ЗПС зажимает палец сверху. Один общий регулировочный винтовой привод зажимает сверху осями-ЗПС пальцы-1-2-3. Регулировочный винтовой привод слишком сильно зажимает пальцы – привод останавливают сгибая пальцы
МЕХАНИЗМ УМЕНЬШЕНИЯ ДЛИНЫ ЭКЗОСКЕЛЕТА ПАЛЬЦА
В экзоскелете фаланги-1 пальца микромотор винтовым приводом, регулировочной тягой-Р1 меняет длину экзоскелета фаланги-1, двигая тягой-Р1 переднюю часть экзоскелета фаланги-1 назад в направляющих задней части фаланги-1. При уменьшении длины фаланги-1 софт укорачивает силовые тяги-1-2, двигающие палец.
Шкивы-1-2 закреплены в главной раме экзоперчатки у основания фаланги-1.
Силовые тяги-1-2 укорачивают силовые троса-1-2 с шкивов-1-2 диаметром 3,5см.
Тяги-1-2 прижатые верхними направляющими к шкивам-1-2, катаются по их верхней части.
Тяги-1-2 выходят назад за шкивы на расстояние в 1,4 раза больше их диаметра. К задним концам тяг-1-2 прикреплены тросы-1-2.
С концов тяг тросы-1-2 идут в верхние части шкивов-1-2, делают полоборота по шкивам-1-2, идут к другим концам тяг.
Привод тянет задние части тросов-1-2 – тяги-1-2 двигаясь в противоположном направлении сгибают экзоскелет пальца
Разгибает экзоскелет пальца трос-ТПВ (трос продольный верхний). После регулировки длины экзоскелета фаланги-1 привод потянув трос-ТПВ экзоскелета пальца, восстановит правильные углы фаланг по измерительной линейке экзоперчатки
Датчик угла фаланги: измерительная линейка экзоперчатки по длине хода троса в экзоперчатке определяет угол фаланги экзоскелета пальца. При регулировке длины экзоскелета фаланги-1 софт таблицей решений «длина фаланги-1 экзоскелета пальца – цифры измерительной линейки тяги» корректирует угловые настройки фаланг-1
Стартовую длину тросов устанавливают многооборотные (4-6 оборота троса на ведущем шкиве) шкивы муфт сцепления Модуля группового привода
Экзоскелеты фаланг-1-2-3, пальцы андроида собраны по схеме «Цепной зажим равномерного прижима» – 1 трос дает одинаковую силу зажима предмета всеми фалангами пальца. Механическая схема фаланг настроена так: в последней четверти длины пальца у его кончика, сила сжатия предмета постепенно растет в сторону кончика пальца – тяжелые круглые предметы не выскользнут с пальцев
Экзоскелет фаланги-1 – самый большой рычаг-звено схемы «Цепной зажим равномерного прижима». Остальные рычаги-звенья схемы «Цепной зажим равномерного прижима» имеют рычаг-звенья длиной 7мм.
Экзоскелет фаланги-3 – наперсток с поперечными, продольными направляющими. Ширину наперстка уменьшает тяга-Р2. Тягу-Р2 толкает тяга-Р1. К подушечке пальца прилегает клиновидная поверхность наперстка. Кончик пальца не касается наперстка чтоб не натерло
При уменьшении длины экзоскелета пальца регулировочный винтовой привод-1 (сверху наперстка) двигает элементы наперстка в направляющих, прижимая длиноходный пружинный упор наперстка к кончику пальца стандартной силой.
Наперсток телескопически складывается: нечетные элементы скользят снаружи четных элементов, четные элементы скользят внутри нечетных элементов. Укорачивают наперсток 2 троса в отверстиях по бокам нечетных элементов. 2 троса двигает регулировочный винтовой привод-1.
Уменьшение длины экзоскелетов фаланг-2-3 за счет длиноходного пружинного упора в наперстке.
Палец длинный – вся фаланга-3 человека внутри наперстка.
Палец короткий – наперсток снаружи фаланги-3 человека, кончик пальца упирается в пружинный упор наперстка
ГЛАВНАЯ РАМА ПРАВОЙ ЭКЗОПЕРЧАТКИ – это короб, его нижняя пластина-Н опора тыльной стороны ладони. У пластины-Н тактильная матрица силы, тепловая тактильная матрица на основе эффекта Пельтье. Правая экзоперчатка в описании в положении тыльная стороны ладони снизу в горизонтальной плоскости. Пальцы направлены вперед
Нижняя пластина-Н состоит из большой пластины-Н1, поддерживающей переднюю часть тыльной стороны ладони и малой пластины-Н2, поддерживающей заднюю правую часть тыльной стороны ладони.
Регулировочный винтовой привод двигает пластину-Н2 по направляющим в пластине-Н1 при регулировке длины экзоскелета ладони. Пластина-Н1 – открытый С-образного сечения короб с вырезом под большой палец.
В коробе слева боковой упор-Л ладони между большим и указательным пальцем. В коробе справа боковая поверхность-Б параллельная боковому упору-Л. Сверху короб соединяют две трубки-В1-В2. Трубки-В1-В2 соединяют сверху левый боковой упор-Л ладони с правой боковой поверхностью-Б.
Пластина-В1 справа и слева согнута на угол 90° вверх (ребра жесткости). В поперечных ребрах жесткости пластины-В1 по углам 4 наклонных выреза-К. В 4 выреза входят 4 стержня-К. 4 стержня-К закреплены в подвижной раме-К, двигающейся горизонтально поперек ладони в неподвижных направляющих-К. Направляющие-К – это две трубки-В1-В2, соединяющие левую и правую вертикальные стенки короба главной рамы экзоперчатки
Вправо раму-К двигает регулировочный винтовой привод. Стержни проходя горизонтально наклонные вырезы-К толкают пластину-В1 вниз. Пластина-В1 зажимает ладонь сверху. Винтовой привод двигает влево раму-К – пластина-В1 идет вверх, разжимает ладонь.
Между трубками-В1-В2 проходит труба-БУ – направляющая для пластины-БУ. К нижней части пластины-БУ приварена длинная продольная трубка-В1 диаметром 11мм. К верхней части пластины-БУ приварена короткая трубка-В2. Трубка-В2 в задней части пластины-БУ.
Трубки-В1-В2 – направляющие пластины-Н2, на которую опирается задняя часть ладони. По направляющим трубкам-В1-В2 винтовой привод двигает вперед пластину-Н2, уменьшая длину экзоскелета ладони.
К пластине-В1 сверху приварен прямоугольный С-образный профиль-1. Внутри этого прямоугольного профиля-1 продольно горизонтально двигается прямоугольный профиль-2.
К прямоугольному профилю-2 снизу приварена пластина-В2. Пластина-В2 зажимает правую заднюю часть ладони. Верхние пластины-В1-В2 не соединены с коробом, двигаются в вертикальных направляющих короба.
В правой стороне пластины-В1 вырезы шириной 1см. В эти вырезы под прямым углом входят прямоугольные вертикальные выступы пластины-БУ шириной 9,95мм. Правый бок ладони зажимает пластина-БУ.
Меняющий длину экзоскелета ладони регулировочный винтовой привод расположен продольно справа. В касающихся ладони пластинах много отверстий вентиляции кожи ладони
Большой палец сзади зажимает расположенный под углом 30° к продольной оси ладони боковой цепной зажим равномерного прижима. Цепной зажим сверху экзоперчатки, зажимает большой палец сверху-назад-вниз.
Человек вставляет пальцы-1-2-3 в короб до касания ладонью двух упоров-D главной рамы экзоперчатки. Упор-D – цилиндрический штырь спереди между пальцами в экзоскелете ладони. Упор-D из нержавеющей стали держит ладонь в экзоскелете.
В передней части короба неподвижная верхняя трубчатая ось-В и неподвижная нижняя трубчатая ось-Н. Между осью-Н и нижней пластиной-Н зазор 5мм. Ось-Н – корневая ось шарнира первых фаланг экзоскелетов пальцев-1-2-3. Ось-Н – направляющая Механизма уменьшения ширины экзоскелета пальца.
В оси-Н снаружи между пальцами-1-2-3 два упора-D. Упоры-D опираются на нижнюю ось-Н короба и верхнюю ось-В короба. Упоры-D двигаются по осям-Н-В при уменьшении ширины экзоскелета пальца.
При уменьшении ширины экзоскелета пальца отдельный регулировочный винтовой привод двигает по осям-Н-В правый ограничитель осевого движения пальцев по осям-Н-В. Левый ограничитель осевого движения пальцев пружинным упором убирает осевой зазор
Сигнал обратной связи, энергоподача в экзоперчатку: 3 вращающихся трансформатора внутри осей 3D-шарнира запястья. Или свернутые в спираль коаксиальные кабеля внутри осей 3D-шарнира запястья
ЭКЗОСКЕЛЕТЫ ЛОКТЯ, ПРЕДПЛЕЧЬЯ
Вертикальная ось-В закреплена в переднем конце Экзоскелета привода локтя.
Экзоскелет датчиковый локтя 3D-шарниром соединен с задней правой частью кисти. В 3D-шарнире 3 пружинных дисковых тормоза с регулировкой момента трения. В Экзоскелете датчиковом локтя есть только зажим верхней части локтя человека. Верхний зажим экзоскелета локтя может вращаться на продольной оси экзоскелета локтя.
Экзоскелет привода локтя соединен шарнирной тягой-ЛП с Экзоскелетом датчиковым предплечья. Шарнирная тяга-ЛП одним концом шарнирно соединена с Экзоскелетом датчиковым предплечья возле его нижнего шарнира. Другим концом тяга-ЛП шарнирно соединена с Экзоскелетом привода локтя возле его верхнего шарнира.
Верхнего зажима предплечья нет. Вместо него плечевой зажим равномерного прижима. Плечевой зажим поворачивается на поперечной горизонтальной оси-ПЗ. Ось-ПЗ закреплена над плечами в экзоскелете туловища.
На старте плечевой зажим включается после окончания регулировки длины экзоскелета туловища. Плечевой зажим оборачивается вокруг плеча сверху вниз, зажимая плечо. Длину плечевого зажима устанавливает регулировочный винтовой привод сзади экзоскелета туловища.
ПРИВОДЫ ТАКТИЛЬНОГО НАПЕРСТКА
1. датчик-1 силы по цифре силы регулировочным приводом слегка зажимает подушечку кончика пальца человека по продольной оси
2. датчик-3 силы по цифре силы регулировочным приводом слегка зажимает по бокам кончик пальца человека
Тактильный наперсток экзоскелета пальца тактильными пикселями передает силу, температуру. Для передачи 3D-вектора силы тактильная матрица наперстка имеет продольный и поперечный приводы с ходом до 3мм
ПЕРЕДАЧА 3D-ВЕКТОРОВ СИЛЫ ТАКТИЛЬНОЙ МАТРИЦЕЙ СИЛЫ
Тактильные матрицы силы андроида и экзоскелета делятся на мини-ячейки из нескольких пикселей. Мини-ячейки экзоскелета имеют продольный и поперечный приводы бокового смещения с ходом до 3мм. Пиксели с приводами мини-ячеек передают 3D-вектор силы. При этом пиксели соседних мини-ячеек тактильных матриц двигаются вбок на величину стандартного зазора между пикселями.
Стандарт сигнала тактильной обратной связи раздельно управляет тактильными 3D-векторами силы при числе отдельных тактильных матриц экзоскелета ладони от 3 до 1600 у разных производителей экзоперчатки.
Работа с хрупкими, непрочными предметами: человек Виртуальной системой управления ставит приоритет тактильной обратной связи кончика пальца выше приоритета силовой обратной связи. Приоритет ограничен верхним порогом силы любого тактильного пикселя. Переход порога убирает приоритет, обратный переход восстанавливает
Коэффициент усиления тактильных пикселей устанавливает человек Виртуальной системой управления
БЫСТРОСЪЕМНАЯ ЗАМЕНА ЭКЗОПЕРЧАТКИ
В экзоперчатке прямоугольная щель-1 имеет внутри 6 разъемов тросовых замков сверху, 6 разъемов тросовых замков снизу.
Присоединение экзоперчатки: человек двинув затвор руки экзоскелета, вставляет другой рукой экзоперчатку прямоугольной щелью-1 в ответный разъем экзоскелета.
6 клиньев верхних замков экзоперчатки сжимают пружины 6 клиньев замков экзоскелета, пока задние выступы 6 клиньев замков экзоскелета не провалятся от силы пружин замков экзоскелета в впадину сзади 6 клиньев замков экзоперчатки. 6 верхних тросов экзоскелета соединены с 6 верхними тросами экзоперчатки.
6 клиньев нижних замков экзоперчатки сжимают пружины 6 клиньев замков экзоскелета, пока задние выступы 6 клиньев замков экзоскелета не провалятся от силы пружин замков экзоскелета в впадину сзади 6 клиньев замков экзоперчатки. 6 нижних тросов экзоскелета соединены с 6 нижними тросами экзоперчатки.
Человек отпускает затвор. Тросы экзоскелета соединены с тросами экзоперчатки. При работе экзоскелета тросы прижимают экзоперчатку к экзоскелету, убирая все зазоры, упругие деформации. При соединении экзоперчатки соединяется разъем тактильного канала экзоперчатки
Отсоединение экзоперчатки: человек двинув затвор руки экзоскелета прижимает друг к другу клинья верхних и нижних замков экзоскелета. Пружины клиньев сжимаются, клинья замков экзоскелета выходят из впадин сзади клиньев замков экзоперчатки. Другой рукой человек вытаскивает экзоперчатку.
Каталог экзоперчаток стандартных . У хирургов, саперов именные личные экзоперчатки высокого разрешения. В тыльной части кисти андроида-сапера телекамера, гамма-излучатель: поиск взрывчатки по пропорции энергии ответного излучения азота, углерода
Экзоперчатка высокого разрешения:
1. суммарное тактильное разрешение 4 пальцев 35000 силовых тактильных пикселей в тыльной стороне пальцев
2. 5-битные силовые тактильные пиксели
3. диапазон чувствительности силового тактильного пикселя от 0,2г. Прогрессивная шкала битности тактильного пикселя: при росте силы прижима пальцев андроида к поверхности, каждая последующая ступенька силы крупнее. Разница сил между ступеньками силы растет в одинаковой пропорции
4. неточность передачи силы на всей шкале диапазона чувствительности силового тактильного пикселя < 3%
5. диапазон передачи температур тепловым тактильным пикселем от –10°С до 70°С с точностью ±0,5°С
6. задержка передачи изменения температуры на 1°С – 0,1сек
7. 12-битные датчики углов запястья, кисти, фаланг-1 пальцев
8. число тактильных матриц с вектором силы в экзоскелете ладони до 1600
Битность датчиков костюма телеприсутствия проверит виртуальный андроид.
Битность датчиков андроида проверит виртуальный костюм телеприсутствия с виртуальным испытателем
Горизонтальные (параллельные плоскости ладони поперечные оси) оси шарниров оснований пальцев-1-2-3 андроида совпадают.
Тактильные пальцы андроида не чувствуют тонкие нити на твердой поверхности – смочить её водой
ТАБЛИЦЫ СООТВЕТСТВИЯ ДВИЖЕНИЙ АНДРОИДА ДВИЖЕНИЯМ ЧЕЛОВЕКА
По настройкам экзоскелета софт по таблицам решений пропорционально копирует андроидом траектории движений кистей, носков и пяток ступней, коленей; верхних суставов локтя, бедра, предплечья человека. Движения андроида софт передает человеку по этим же таблицам.
Таблицы соответствия координат пальцев андроида и экзоперчатки (цифры в процентах) переводят углы пальцев андроида в углы экзоскелетов пальцев, компенсируя разницу движений андроида, человека. Настройки: приводы поочередно смыкают с кончиком большого пальца кончики пальцев-1-2-3. Кончики пальцев экзоперчатки софт соприкасает позже кончиков пальцев андроида на время равное 101% задержки управления
Таблицы соответствия координат приводами уравнивают графики изменения расстояния между тактильными точками-Р1-Р2-Р3-L1-L2 в кисти андроида и в экзоперчатке.
Тактильная точка-Р1 – точка в центре подушечки кончика пальца-1
Тактильная точка-Р2 – точка в центре подушечки кончика пальца-2
Тактильная точка-Р3 – точка в центре подушечки кончика пальца-3
Тактильная точка-L1 – на линии-L1 проходящей через продольную ось пальца-1, когда все пальцы вытянуты вперед. Точка-L1 находится на расстоянии-L1 от основания пальца-1. Расстояние-L1 равно 75% расстояния от основания пальца-1 до основания большого пальца кисти
Тактильная точка-L3 находится на линии-L3 проходящей через продольную ось пальца-3, когда все пальцы вытянуты вперед. Точка-L3 находится на расстоянии-L3 от основания пальца-3. Расстояние-L3 равно 75% расстояния от основания пальца-3 до основания большого пальца кисти
База системы координат кисти человека для таблиц соответствия координат:
1. поперечная горизонтальная (плоскость ладони горизонтальна, тыльная сторона ладони направлена вниз) ось указательного пальца-1 – это базовая линия, от которой отсчитывают в процентных размерах координаты фаланг пальцев-1-2-3.
2. центр поперечной горизонтальной оси пальца-3
3. продольная горизонтальная ось плоскости ладони, проходящая параллельно продольной оси среднего пальца-2
4. центр продольной горизонтальной оси фаланги-1 большого пальца
Частота кадров тактильных матриц-передатчиков андроида 350-1000Hz (частота опроса датчиков). Частоту опроса датчиков 350-1000Hz софт андроида преобразует в частоту кадров тактильной обратной связи 5-50Hz (частота обратной связи). Затем подает в линию обратной связи «андроид – костюм телеприсутствия».
Частоту тактильной обратной связи 5-50Hz софт экзоскелета преобразует в частоту кадров (часть кадров повторяется) тактильных матриц-приемников экзоскелета 350-1000Hz
Тактильная матрица экзоскелета – пьезоэлектрические многослойные или магнитострикционные прямоугольные колечки, сквозь отверстия которых пересекаясь проходят коммутируемые в 2-х направлениях провода тактильной матрицы. Прямоугольное колечко – тактильный пиксель.
Тактильный сигнал удлиняет, укорачивает колечки. Колечки из сплава (TbFe2, Yco5, PrСо5) редкоземельных металлов с гигантской магнитострикцией. Ультразвуковые колебания длины колечек симулируют рост температуры тепловых тактильных пикселей
ТЕПЛОВЫЕ ТАКТИЛЬНЫЕ ПИКСЕЛИ ЭКЗОПЕРЧАТКИ
Тепловой тактильный сигнал передает температуру, скорость её изменения. О теплопроводности теплоемкости предмета в руках андроида, человек узнает по скорости изменения температуры пикселей экзоскелета пальца. У воды высокие теплопроводность, теплоемкость: температура пикселей снизилась быстро по квадратичному графику при касании, затем немного выросла – поверхность мокрая.
У дерева высокая теплоемкость, низкая теплопроводность – температура пальца андроида быстро растет, дерево медленно остывает после отвода пальца. У металлов высокая теплопроводность, ниже теплоемкость – температура пальца андроида быстро снижается, остается пониженной
Тепловые тактильные пиксели с эффектом Пелтье: сплав теллур + висмут охлаждает на 72°C ниже температуры среды в пересечениях проводов с полупроводниковым покрытием в тактильной матрице. Тактильный сигнал нагревает или охлаждает тепловой тактильный пиксель экзоперчатки, меняя полярность соединения теллур + висмут
Сверхбыстрая оценка человеком теплопроводности материала в пальцах андроида
Человек Виртуальной системой управления увеличит масштаб изменения температуры тактильных пикселей экзоперчатки в узком диапазоне температур. Разницу температур между пикселями можно усилить Виртуальной системой управления
ТАКТИЛЬНАЯ МАТРИЦА ТЕПЛОВОГО ПОТОКА
При температурах близких к температуре тела человека или выше её, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока
Тепловая тактильная матрица выполняет функцию тактильной матрицы теплового потока при условии:
1. тепловые пиксели имеют высокую точность
2. температурная симуляция кожи человека: подогрев тепловых тактильных матриц андроида
Экзоперчатка дает ложные тепловые ощущения (человек в комнатных условиях, андроид под ветром в холодном тумане) из-за разницы температур, влажности, теплоемкости воздуха, поэтому:
1. температурная симуляция кожи человека: подогрев тепловых тактильных матриц андроида
2. андроид передает сигнал теплоемкости и температуры воздуха каждые 3 мин отдельными датчиками, по которым таблицы решений «температура воздуха – тепловой поток», «теплоемкость воздуха – тепловой поток» корректируют тепловой тактильный сигнал
СИМУЛЯЦИЯ ТАКТИЛЬНЫМИ ПИКСЕЛЯМИ СЛАБЫХ СИЛ
Диапазон слабых сил софт симулирует вибрацией пикселей. Выбор алгоритма изменения амплитуды, частоты вибрации.
На выбор алгоритм сообщающий частотой вибрации скорость изменения силы. При росте нагрузки идут импульсы с резко нарастающей, плавно спадающей амплитудой волны. Нагрузка уменьшается – импульсы с медленно нарастающей, резко спадающей амплитудой волны.
ОБРАТНАЯ ЭЛЕКТРОВИБРАЦИЯ – тактильные пиксели-электроды:
1. резко растущее, медленно падающее пульсирующее напряжение электрода кожа ощущает как выпуклость
2. медленно растущее, быстро падающее пульсирующее напряжение кожа ощущает как вогнутость
ЗАДЕРЖКА ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗИ субъективно ощущается меньше при:
1. длиноходных тактильных пикселях экзоперчатки
2. число строк, рядов тактильных пикселей тактильной матрицы минимум по 48
3. крутизна передних фронтов (сила резко растет, медленно спадает) графика сигнала тактильных пикселей экзоскелета
4. зажимные рамы экзоперчатки без люфта фиксируют пальцы с 4-х сторон
5. тактильные матрицы и палец взаимно неподвижны, нет сдвига
ПАЛЬЦЫ АНДРОИДА
Кончики пальцев с упругим фрикционным слоем и мягкой тактильной матрицей. Кончики пальцев из твердого сплава с фрикционным слоем + твердая приемная тактильная матрица на ультразвуковых волнах
В кончике пальца андроида вырез с полукруглой острой гранью имитирующей ноготь. Мелкая насечка грани для сборки мелких механизмов. Цилиндрическая по форме верхняя поверхность ногтя – это алмазный надфиль доводки мелких механизмов при сборке
Определение уровня хрупкости материала предмета в руке андроида: пиксель-1 дает слабый ультразвуковой сигнал растущей частоты в поверхность предмета. Дальний пиксель-2 измерит размах поперечной волны. По частотной характеристике поперечной волны в материале предмета и таблицам решений софт определит материал, уровень его хрупкости
Определение химического состава материала предмета по скорости звука и скорости изменения температуры кончика пальца. Сверхтвердый кончик пальца андроида для ультразвуковой сварки, шлифовки
ТВЕРДАЯ ПРИЕМНАЯ ТАКТИЛЬНАЯ МАТРИЦА НА УЛЬТРАЗВУКОВЫХ ВОЛНАХ (моё изобретение: приоритет 5.03.2025г)
По периметру тактильной матрицы андроида ультразвуковые датчики-излучатели, датчики-приемники. Ультразвуковые датчики-излучатели поочередно в двух взаимно-перпендикулярных направлениях вдоль поверхности тактильной матрицы дают фронт ультразвуковой поперечной волны. Фронт волны огибая тактильные пиксели с высокой силой давления создает разницу графиков волны в датчиках-приемниках. По разнице графиков софт по таблицам решений дает тактильный кадр.
ПЕРЕДАЧА В ЭКЗОПЕРЧАТКУ ВИБРАЦИИ ПАЛЬЦЕВ АНДРОИДА
Внутри кончика пальцев андроида 3D-микрофон с высокой битностью и чувствительностью дает сигнал-D 3D-вибропередатчику кончика пальца экзоперчатки. 3D-микрофон – 3 взаимно перпендикулярно совмещенных микрофона с диаграммой направленности «восьмерка».
Суммарная чувствительность 3D-микрофонов широко разнесенных рук андроида, прижатых кистями к грунту позволяет софту по вектору вибрации узнать – едет ли по дороге машина, работает ли двигатель, куда едет, сколько весит.
Софт попросив человека переставить руки по разнице скорости продольных и поперечных сейсмических волн определит тип подвески машины, длину и ширину колесной базы. Человек выделит колебания в выбранном направлении джойстиком и колесиками Виртуальной системы управления
Жесткость костюму телеприсутствия дают детали из однонаправленных волокнитов по технологии «кокон» – намотка на деталь с жесткого пеноматериала (с отверстиями внутри для тросов, кабелей) высокомодульного углеволокна по линиям действия сил. На волокна нет нагрузок кроме сжатия, расстяжения.
ОКОНЧАНИЕ РАБОТЫ КОСТЮМА ТЕЛЕПРИСУТСТВИЯ – человек жмет Красную кнопку безопасности:
1. костюм телеприсутствия фиксируется в стартовом положении
2. зажимы освободят человека
3. 3D-экран уводит вверх пружина
СИСТЕМА БЕЗОПАСНОСТИ КОСТЮМА ТЕЛЕПРИСУТСТВИЯ
Красная кнопка безопасности отключит приводы, интернет, компьютер костюма телеприсутствия, остановит 3D-кардан в безопасном положении. Управление голосом, жестом (установки) красной кнопкой безопасности. У механических ограничителей углов рук, ног бесшумная прогрессивная пружинная подвеска как у заднего колеса кроссового мотоцикла.
Звуковой сигнал предупредит: экзоскелет отключен от андроида из-за превышения разрешенных установками угловых скоростей экзоскелета.
Сила в тросе мала несмотря на работу привода – это обрыв троса. Софт отдельного Компьютера безопасности включит Красную кнопку. В экране слова: Обрыв троса
Сила приводов костюма телеприсутствия вдвое больше чем у среднего человека. По законам государства:
1. обязательна отделенная от интернета и софта система механических ограничителей углов рук, ног – защита от хакера
2. обязательна функция невозможности изменения установок в работающем костюме телеприсутствия
УГОЛОВНЫЙ КОДЕКС ЗАПРЕТИТ:
1. использовать костюм телеприсутствия без шифрования канала связи
2. использовать костюм телеприсутствия без передачи шифра канала связи уполномоченным госслужбам
3. блокировать возможность государства быстро отключить любой костюм телеприсутствия
4. подключение компьютера безопасности к интернету или внешней линии связи закон карает как покушение на убийство.
5. использовать против полицейских андроидов электромагнитные помехи, сверхяркие светодиодные фонари засвечивающие телекамеры. Радиоканал полицейских андроидов дублирован от помех стационарными и мобильными (беспилотники) ФАР-антеннами, узконаправленной (обратной связью с приемником) гиростабилизированной лазерной связью
6. элементы защиты линии связи полицейских и военных андроидов от помех, взлома – гостайна
7. выход за пределы разрешенной территории (автоматическая сигнализация в госорганы)
8. аватарное убийство карает закон
9. подделка госпароля. Андроиды законом снабжены известным госорганам госпаролем перехвата управления
10. применение костюмов телеприсутствия с нелицензированного сайта. В лицензированном аватар-сайте обязателен дублированный регистратор данных и дежурный модератор. Гослицензия управления андроидом. Класс лицензии управления андроидом – по уровню риска для общества: зависит от территории, времени суток
11. несохранение данных регистратора данных аватар-сайта на период времени требуемый законом
12. подделка идентификации пользователя
13. использование прокси-сервера
ДИАПАЗОН РАССОГЛАСОВАНИЯ (НЕСОВПАДЕНИЯ) УГЛОВ – это точность передачи углов обратной связи «костюм телеприсутствия – андроид». Ускорение движения рук (ног) человека растет – алгоритм уравнивает процентные точности «скорость руки (ноги) – диапазон рассогласования», уменьшает точность передачи угла руки для роста точности передачи скорости (силы) руки. Диапазон рассогласования углов линейно растет с угловым ускорением: человек может установить нелинейный график
Диапазон рассогласования углов обратной связи «костюм телеприсутствия – андроид»:
1. меньше диапазон рассогласования углов – андроид точнее, медленнее, больше жесткость обратной связи «человек – андроид». Диапазон рассогласования углов: по величине силы (скорости роста) и балансу «точность – мощность», по режиму (сапер, хирург, сварщик…)
2. высокая жесткость силовой обратной связи передает ощущение твердости предметов: при резком тормозном ускорении включается минимальное рассогласование углов костюма телеприсутствия
3. больше диапазон рассогласования углов – быстрее, сильнее андроид
4. быстрее движения человека – больше диапазон рассогласования углов
5. человек выбирает графики зависимости «угловая скорость – диапазон рассогласования углов», «задержка управления – диапазон рассогласования углов»: больше задержка управления или угловая скорость движений человека – больше диапазон рассогласования углов
Чтоб твердые предметы не ощущались упругими:
1. силы приводов костюма телеприсутствия вдвое сильнее мышц человека
2. быстродействие торможения приводов не хуже 0,1сек
С ростом угловой скорости человека растут:
1. частота опроса датчиков угла (алгоритм прогноза)
2. диапазон рассогласования углов для уменьшения задержки управления
3. диапазон угловых ускорений
С ростом силы человека или скорости ее роста растут:
1. диапазон рассогласования углов для уменьшения задержки управления
2. диапазон угловых ускорений для уменьшения задержки управления
3. частота опроса датчиков сил, углов (алгоритм прогноза)
Робот-сапер, робот-хирург:
1. больше частота опроса датчиков сил, углов
2. мал диапазон рассогласования углов
3. мал диапазон угловых ускорений
4. установки коэффициентов угловой скорости
5. установки ограничений угловой скорости, углового ускорения
6. больше точность датчиков углов, сил
7. более быстродействующие датчики, приводы
8. увеличенные диаметр и сила натяжения тросов
9. установки чувствительности (малое или отрицательное усиление) в установленном диапазоне малых сил
10. выше жесткость конструкции для плавности движений, экономичности и минимума задержки управления
11. установки коэффициента усиления градиента силы в передаче движения от робота к человеку
12. робот-сапер: установки диапазонов веса (измерение в проекции на вертикаль) стандартных деталей мин включающих сигнализатор: вибрация экзоскелета кисти руки, звуковой (голосовой) сигнал, текст в экране
Крупногабаритные манипуляторы:
1. больше частота опроса датчиков сил, углов
2. мал диапазон рассогласования углов
3. мал диапазон угловых ускорений
4. больше точность датчиков углов, сил
5. плавный рост угловой скорости защищает от раскачки манипулятора
6. обратная связь приводов с датчиками ускорения у захвата
7. тросы, манипулятор из высокомодульных материалов с высокой скоростью звука уменьшат раскачку манипулятора, задержку управления
8. при подходе к конечной точке привод выключается раньше времени. Дальше за счет упругости манипулятора, его тросов
9. при перемещении вбок конца манипулятора привод дает поперечной волной в манипуляторе толчки таблицей решений «импульс – перемещение». Сильный толчок-1 двигает вбок конец манипулятора, слабый толчок-2 в противофазе гасит раскачку. Повтор цикла для плавного движения в том же направлении. Этот дает максимальное быстродействие, точность
10. упругие деформации манипулятора компенсирует приводами сигнал 3D-датчика ускорения захвата
УСКОРЕНИЕ ПРИВОДА
Чем больше задержка управления, тем больше ускорение ведомого сигналом привода. Выбор алгоритма ускорения
УГЛОВЫЕ КОЛЕБАНИЯ рук андроида (человека) между соседними уровнями угла сигнала обратной связи убирают так:
1. в датчиках угла рук андроида, в экзоскелете угловое разрешение больше чем в сигналах обратной связи
2. при пересечении границы минимальной единицы угла сигнала обратной связи, в датчике руки андроида (экзоскелета) привод по алгоритму держит угол руки на этой границе, пока сигнал не даст команду пересечь следующую единицу угла сигнала.
Трафик мал – софт уменьшит угловое разрешение обратной связи по таблице решений «трафик – угловое разрешение»
Инерционные колебания ведущего, ведомого приводов силовой обратной связи дают биения резонансных частот приводов. Пружины в обоих направлениях движения привода, коммутация секций обмоток привода в разы уменьшат инерцию приводов и паразитные колебания обратной связи, повышая (легче убрать амортизатором) частоты паразитных колебаний.
Датчиков силы колебания сигнала 2,5-10Hz гасит фильтр паразитных колебаний муфтами сцепления. Софт дает сигналу торможения больше усиления и затухания, чем сигналу ускорения. Установки Виртуальной системой управления графиков усиления, затухания
Софт держит постоянным натяжение тросов, выбирая зазоры, упругие деформации экзоскелета:
1. тросы сгибателей натягивают тросы разгибателей
2. натяжение троса регулирует электромагнитное поле вращающееся назад быстрее, чем вперед крутится электромотор-маховик
3. тросы натягивает паразитный момент от вращения разомкнутых обмоток муфт сцепления мимо постоянных магнитов тянущих шкивов-ТТ группового привода
Большая сила натяжения тросов повышает реализм ощущения формы объектов, структуры поверхности. Тросы костюма телеприсутствия, андроида высокомодульные (не пружинят) с высокой скоростью звука для уменьшения задержки управления
ДВУХСЕКУНДНАЯ СТАРТОВАЯ МОЩНОСТЬ (пропорциональна окружной скорости. Мощность = момент умножить на обороты за 1сек) системы «маховик + конденсатор + электромагнитная муфта сцепления» 15 раз больше разгоняющегося с нуля электромотора. Костюм телеприсутствия оптимизирован на унификацию транзисторных муфт сцепления
МОДУЛЬ ГРУППОВОЙ ПРИВОД ЭКЗОСКЕЛЕТА
имеет 44 троса выходящих с его шкивов:
12 тросов – в шкивы экзоскелета левой руки
12 тросов – в шкивы экзоскелета правой руки
14 тросов – через тазобедренный балансир в экзоскелеты ног
4 троса – в активную 3D-подвеску экзоскелета
Модуль групповой привод экзоскелета – это электромотор-маховики-1-2 слева, справа от спины человека. Оси электромотор-маховиков поперечно горизонтальны на старте, находятся в одной прямой.
Электромотор-маховики-1-2 вращаются в противоположные стороны, чтоб вращающие моменты не шли в пол квартиры, создавая грохот и сотрясая здание. Электромотор-маховик-1 дает вращающий момент по часовой стрелке больше электромотор-маховика-2 – электромотор-маховик-2 сильнее натянет все тросы, не двигая их. Это уравняет моменты электромотор-маховиков обратной связью софта с датчиками ускорения корпуса модуля группового привода.
Электромотор-маховик-1 – левая вращающаяся длинная ось-D1 с закрепленными в ней 22 дисками-статорами-DS с трехфазной обмоткой.
Электромотор-маховик-2 – правая вращающаяся длинная ось-D2 с закрепленными в ней 22 дисками-статорами-DS с трехфазной обмоткой. У дисков-статоров-DS диаметр 1м.
Неподвижная трехфазная обмотка стартера (в торце электромотор-маховика) вращает электромотор-маховик. Индуцированный в обмотках электромотор-маховика ток через выпрямитель идет в силовой коаксиальный кабель постоянного тока внутри оси-D электромотор-маховика. По сигналу управления транзисторы подключают к силовому кабелю обмотки муфт сцепления, соединяя роторы с электромотор-маховиком
Сигнал управления обмотками электромотор-маховика идет через вращающийся трансформатор. Сигнал управляет оборотами каждого ротора отдельно. Снаружи электромотор-маховика 22 роторов с шкивами, двигающих 22 тросов. Обратный ход тросу-сгибателю руки дают тросы-разгибатели руки.
Мощность электромотор-маховика можно концентрировать в 1 трос. Групповой привод костюма телеприсутствия имеет задержку управления 0,02сек. Для привода я изобрел дешевую коммутацию сверхбольшой силы тока
МУФТА СЦЕПЛЕНИЯ – это ротор-цилиндр-М вращающийся снаружи диска-статора-DS. Внутри ротора-цилиндра-М наклеены постоянные магниты. Ротор-цилиндр-М сбоку соединен с диском-М. В диске-М подшипник-L скольжения, тянущий шкив-ТТ на 4 оборота троса.
Шкив-ТТ вращается до 4 оборотов с возвратом в стартовое положение. Шкив-ТТ вращается в трубчатой оси-ТО в неподвижной раме-RS, расположенной между вращающимися дисками-статорами-DS электромотор-маховика. Неподвижная рама-RS не касается оси-D1.
Шкив-ТТ ротора электромотор-маховика при нагрузке передает силу троса в подшипник скольжения неподвижной рамы-RS. Радиальная сила тянущая трос, на длинную ось-D1 нагрузку не дает.
Шкив-ТТ тянущего троса имеет диаметр в ~10 раз меньше диаметра цилиндра-М. Конец-1 троса закреплен в шкиве-ТТ, конец-2 троса идет в экзоскелет.
Шкивы роторов электромотор-маховика снаружи на длинной оси-D1. Тянущий трос шкива-ТТ идет между вращающимися дисками-статорами-DS электромотор-маховика на экзоскелет.
В шкивах большой момент за счет диаметра ротора электромотор-маховика 1 метр. Сила экзоскелета руки большая: половина тросов работает на сгибатели, другая половина тросов на разгибатели экзоскелета руки – в пальцах короткий ход, в плечах длинный ход тех же тросов. Для точности движений пальцев ходу тросов-сгибателей противодействуют пружины
Выходной момент муфты сцепления софт регулирует коммутацией секций обмоток силовыми транзисторами – меняется индуктивное сопротивление. В режиме муфты сцепления её трехфазная обмотка работает как одна общая однофазная обмотка
Режимом регенерации электроэнергии в муфте сцепления софт управляет коммутацией секций обмоток силовыми транзисторами. В режиме регенерации электроэнергии трехфазная обмотка муфты сцепления работает как одна общая однофазная обмотка с повышенным числом витков
УПРАВЛЕНИЕ МУФТАМИ СЦЕПЛЕНИЯ ГРУППОВОГО ПРИВОДА
Управление угловой обратной связью по сигналам угла, угловой скорости.
Привод отстает от цифры сигнала угла. Софт по таблице решений
«разница сигнала угловой обратной связи и датчика угла – процент противофазной работы приводов»
уменьшит процент противофазной работы приводов сгибателя и разгибателя руки (ноги) у экзоскелета (у андроида).
Инерция привода слишком велика, проскакивает цифру сигнала. Софт увеличит процент противофазной работы приводов сгибателя и разгибателя руки (ноги)
Управление силовой обратной связью по сигналам силы, скорости роста силы.
Привод отстает от цифры сигнала – софт по таблице решений
«разница сигнала силовой обратной связи и датчика силы – процент противофазной работы приводов»
уменьшит процент противофазной работы приводов сгибателя и разгибателя руки (ноги) у экзоскелета (у андроида).
Инерция привода слишком велика, проскакивает цифру сигнала. Софт увеличит процент противофазной работы приводов сгибателя и разгибателя руки (ноги).
На малых угловых скоростях приоритет по энергии у силовой обратной связи. Угловая скорость превысила Критическую цифру – приоритет у угловой обратной связи
ДВУХРЕЖИМНАЯ МУФТА СЦЕПЛЕНИЯ
Муфта сцепления привода 80-90% угла поворота выходного вала по сигналу обратной связи выполняет в режиме максимальной мощности. 10-20% – в режиме точной остановки (квадратичный график силы привода).
РЕЖИМ МАКСИМАЛЬНАЯ МОЩНОСТЬ – регулируется мощность единичных импульсов обмоток муфты сцепления.
РЕЖИМ ТОЧНАЯ ОСТАНОВКА – регулируется частота импульсов обмоток муфты сцепления. Приводы сгибателей экзоскелета работают против приводов разгибателей. Противофазный режим работы приводов в каждом периоде опроса датчиков замедляет экзоскелет, подгоняя угол поворота руки (ноги) к сигналу. Вибрацию софт гасит графиком силы с таблицы решений.
Привод тормозит чуть раньше – экзоскелет двигает упругое сокращение длины троса по таблице решений привода
«сила – время действие силы – упругий ход троса».
ВАРИАНТ-2 ГРУППОВОГО ПРИВОДА
в костюме телеприсутствия длинные электромотор-маховики-1-2 (в виде вращающейся трубы) противоположного вращения справа, слева от спины человека. Оси электромотор-маховиков параллельны оси позвоночника человека, расположены вертикально близко к спине человека. Электромотор-маховик костюма телеприсутствия – это вращающаяся труба-статор с трехфазной обмоткой, внутри неё 21 роторов привода тросов экзоскелетов рук (ног).
Внутри правого электромотор-маховика неподвижная труба-Н с упорной резьбой с 21 разрезными медными гайками скольжения. Упорная поверхность резьбы перпендикулярна оси правого электромотор-маховика: защита от радиально-клинового эффекта.
Автомат обнуления радиального зазора: у гаек разрез с системой пружинящего изгиба гайки по разрезу чтоб убрать радиальный зазор, иначе резьбу сорвет осевая сила.
На внешней стороне гайки медный ротор типа Беличья клетка. Вращающийся правый электромотор-маховик разделен по длине на 21 секцию с трехфазными обмотками. Трехфазная обмотка каждой секции правого электромотор-маховика при вращении создает индукционный ток в роторе парной гайки. Каждая пара «электромотор-маховик – гайка» – это муфта сцепления.
Индукционный ток вращает гайку в резьбе, толкая невращающееся но скользящее по торцевой поверхности гайки кольцо вдоль оси гайки. Кольцо – упорный подшипник скольжения передающий силу осевого перемещения гайки на трос шкива 2D-шарнира экзоскелета правого плеча человека.
При уменьшении нагрузки на трос в электромотор-маховике магнитное поле бежит назад, вращая гайку в обратную сторону в нулевое положение. Задний ход гайки – кольцо идет назад.
Сигнал управления транзисторами муфты сцепления меняя число транзисторов, частоту, период короткого замыкания обмоток электромотор-маховика управляет 0-100% пробуксовкой (скольжением) сцепления электромотор-маховика с гайкой.
У каждой парной для гайки трехфазной обмотки электромотор-маховика свой колебательный контур, своя несущая частота сигнала управления. При замыкании 2-х транзисторов (переменный ток) обмотки гайки, момент на гайке вдвое больше чем при одном транзисторе. Гайки правого электромотор-маховика двигают 21 тросами
ТАБЛИЦЫ РЕШЕНИЙ «УГОЛ – ЭНЕРГИЯ ИМПУЛЬСА – МОМЕНТ ИМПУЛЬСА»
Точная цифра энергии импульса привода двигает руку (ногу) на угол Х°. Энергия импульса = силу тока в муфте сцепления умножить на время импульса. Время импульса отмеряют таблицы решений.
4 конденсатора параллельно-последовательными схемами их транзисторной коммутации с обмотками муфты сцепления, отмеряют энергию импульса муфтам сцепления группового привода. Остальное время транзистор закорачивает коммутатор с 4 конденсаторами. Один конденсатор может работать на несколько муфт сцепления по таблицам шаблонных решений.
В переменном токе последовательное соединение конденсатора с обмоткой муфты сцепления на 75% увеличивает энергию импульса муфты сцепления.
По таблице решений привод дергает трос в разы сильнее сигнала, затем трос двигает упругое сокращение его длины – меньше помех от упругости троса, меньше задержка управления.
Мозг человека вычисляет движения мышц с учетом задержки управления мышц 0,01сек от мозга до мышц. Управлять андроидом с разной задержкой управления помогут тренировки: стрелу спортивного лука в последние 1,5м её полета человек может поймать рукой только вслепую – мозг заранее вычисляет последние видеокадры для управления рукой
ЗАЩИТА ПРИВОДОВ ОТ ПЕРЕГРЕВА:
1. 90-100% нагрузки на привод андроида – звуковой сигнал
2. у андроида перегружен палец, рука, нога, спина – человек чувствует местный вибросигнал: частота растет в диапазоне 90-100% нагрузки на привод андроида
СИМУЛЯЦИЯ СТОЛКНОВЕНИЯ ЧЕЛОВЕКА С СТЕНОЙ
это мгновенное торможение выходных валов: мгновенную мощность группового привода ~2000кВт дают силовой конденсатор с транзисторным реле. Энергию силового конденсатора ленточным коаксиальным кабелем в обмотки транзисторных муфт сцепления группового привода
ЗАЩИТА ОТ ПРЕРЫВАНИЯ СИГНАЛА ПРИ ПЕРЕКЛЮЧЕНИИ МЕЖДУ СПУТНИКАМИ: ещё не кончил передачу сигнала спутник-А, следующий спутник-В дублирует сигнал обратной связи.
РЕЖИМ «ПРОГНОЗ»
Прервался сигнал, велика задержка управления – человек, алгоритм включит режим «ПРОГНОЗ» – по изменению угловой скорости и скорости роста силы, по анализу траектории рук и ног софт заранее двигает приводы андроида, костюма телеприсутствия. В настройках человек уточнит цифры, алгоритмы прогноза. В режиме «ПРОГНОЗ» костюм телеприсутствия, андроид определив момент прерывания сигнала, работают в одинаковом алгоритме.
При быстром росте цифры угла (силы) софт андроида дает костюму телеприсутствия не цифру датчика угла (силы), а цифру датчика через период его сканирования с вероятностью 80% (алгоритм вероятности). Аналогично углы (силы) экзоскелета идут в приводы андроида. Цифру вероятности для обоих сторон сигнала меняют колесики Виртуальной системы управления костюма телеприсутствия.
Режим «Прогноз» повторяет ключевые точки движений человека с уточнением расстояния до пола. Алгоритм корректирует работу ног андроида по рельефу местности. Цифры коррекции ног андроида идут в экзоскелет. Виртуальной системой управления человек колесиком регулирует процентный коэффициент синхронизации движений человека и андроида
При прерывании сигнала обратной связи, потере устойчивости андроида работает
СИСТЕМА УСТОЙЧИВОСТИ АНДРОИДА institutrobotov.ru/#7
1. алгоритм продольной устойчивости андроида по центру масс и вектору инерции поддерживает устойчивость движения андроида в продольной вертикальной плоскости центра масс андроида и отдельно груза в его ладонях. Сохраняет параметры (установки на ускорение, спуск, подъем Виртуальной системой управления костюма телеприсутствия) ходьбы и бега андроида, останавливает его по установкам человека. Ограничивает продольно-горизонтальное ускорение телекамер головы и ладоней андроида
2. алгоритм поперечной устойчивости андроида: устойчивость движения в поперечной вертикальной плоскости центра масс андроида и отдельно груза в его ладонях. Ограничивает величину перемещения (установки реакции на ускорение, наклонную поверхность ходьбы) вбок андроида в ходьбе, поднятии тяжести. Ограничивает поперечно-горизонтальное ускорение телекамер головы и ладоней андроида
3. алгоритм вертикальных движений: устойчивость движений по вертикали центра масс андроида и отдельно груза в его ладонях. Стабилизирует по вертикали телекамеры андроида, ограничивает вертикальное ускорение телекамер головы и ладоней андроида
4. алгоритм-1 держит в одном месте вертикаль центра масс туловища андроида
5. алгоритм-2 держит в одном месте вертикаль плеча одной руки
6. алгоритм-3 держит в одном месте вертикаль центра правой ладони, сохраняя положение локтя в одной вертикальной плоскости
В ступне андроида 3D-датчики линейного ускорения. По их сигналу алгоритмы (установки человека) управляют андроидом.
Алгоритмы сохраняют угловую ориентацию груза (пулемет, дальнобойный гиростабилизированный тепловизор...) в ладонях андроида, уменьшают ускорения движения его центра масс по вертикали
Установки Система устойчивости андроида:
1. человек уточняет угловую скорость отклонения вперед-назад от вертикали линии «центр масс – мгновенный центр опоры ступней андроида», при превышении которой и отсутствии трафика сигнала сработает алгоритм продольной устойчивости андроида.
2. человек уточняет угловую скорость отклонения вправо-влево от вертикали линии «центр масс – мгновенный центр опоры ступней андроида», при превышении которой и отсутствии трафика сигнала сработает алгоритм поперечной устойчивости андроида.
3. человек уточняет цифру размаха знакопеременных вертикальных движений центра масс андроида и отдельно эту цифру для груза в его ладонях, при превышении которой и отсутствии трафика сигнала работает алгоритм вертикальных движений.
4. человек уточняет цифру ускорения вертикальных движений центра масс андроида и отдельно эту цифру для груза в ладонях андроида, при превышении которой и отсутствии трафика сработает алгоритм вертикальных движений.
5. установки параллельного режима работы алгоритмов устойчивости андроида, в котором алгоритмы работают независимо от сигнала обратной связи.
6. установка коэффициента прерывания сигнала для уточнения работы алгоритмов. Коэффициент прерывания сигнала – это прерывание сигнала на Х% от времени приема сигнала
УПРАВЛЕНИЕ 3D-ПОЛОЖЕНИЕМ АНДРОИДА В ПРЫЖКЕ В МЕСТНОЙ СИСТЕМЕ КООРДИНАТ
3D-положение андроида от пола в местной системе координат софт находит по таблицам решений. Таблицы дают решение по цифрам:
1. левого плечевого 3D-гироскопа
2. правого плечевого 3D-гироскопа
3. 3D-гироскопа в центре тазобедренного балансира андроида
3D-гироскоп дает 3 угла положения туловища андроида в местной системе координат + 3 угловые скорости туловища андроида в 3 осях пространства. Суммируя угловые скорости трех 3D-гироскопов софт получает мгновенный вектор линейного ускорения туловища андроида.
Датчик-Л ускорения-Л левого плеча андроида дает цифры вектора ускорения-Л.
Датчик-П ускорения-П правого плеча андроида дает цифры вектора ускорения-П.
Датчик-Ц ускорения-Ц центрального шарнира тазобедренного балансира андроида дает цифры вектора ускорения-Ц.
Софт андроида векторы ускорений-Л-П прикладывает к точке-Ц в центре отрезка соединяющего датчик-Л с датчиком-П, вычисляет суммарный вектор-ЛП.
В точке-Ц суммируются вектор-Ц и вектор-ЛП. Векторы софт суммирует по проекциям векторов отдельно на каждую ось системы координат XYZ андроида. Суммирование проекций векторов дает суммарный вектор-ЛПЦ движения туловища андроида. Цифры суммарного вектора-ЛПЦ туловища андроида – сигнал активной 3D-подвески экзоскелета
В таблицах решений мгновенная цифра угловой скорости туловища андроида в данном положении мгновенной оси вращения туловища андроида в местной системе координат, мгновенная цифра момента инерции туловища андроида в данном положении мгновенной оси вращения туловища андроида + цифра добавочного суммарного мгновенного момента инерции от рук, ног андроида в данном положении мгновенной оси вращения туловища андроида.
Суммарный мгновенный момент инерции рук и ног андроида находят таблицы решений по цифрам датчиков углов рук, ног андроида. Положение мгновенной оси вращения туловища андроида в местной системе координат вместе с положением от пола центра масс андроида, находят таблицы решений по истории изменения положения мгновенной оси вращения туловища андроида в местной системе координат.
Положение мгновенной оси вращения туловища андроида в местной системе координат, таблицы решений находят раздельно по осям системы координат XYZ. Затем во время периода опроса датчиков андроида суммируют полученные цифры, получая параметры мгновенной оси вращения туловища андроида в местной системе координат.
Перед прыжком софт распознает тип прыжка выполняемого человеком в экзоскелете, чтоб использовать ШАБЛОН ПРЫЖКА при выполнении прыжка андроидом. Можно в зависимости от мощности андроида выполнять одинарное, двойное, тройное или четверное сальто, или прыжки муай-тай.
Распознают прыжок человека таблицы решений по цифрам датчиков костюма телеприсутствия. Цифры укладываются в разрешенные диапазоны ШАБЛОНА РАСПОЗНАВАНИЯ ПРЫЖКА выполняемого человеком – андроид выполнит прыжок по этому ШАБЛОНУ ПРЫЖКА.
Распознавание действий человека софт продолжает в процессе прыжка андроида по ШАБЛОНУ ПРЫЖКА. Выполнять или нет добавочные движения человека решает софт в зависимости от задержки управления и настроек Виртуальной системы управления.
Человек может жестом кисти «РУЧНОЕ УПРАВЛЕНИЕ» запретить использование шаблонов или Виртуальной системой управления уточнить алгоритмы использования шаблонов
Симуляция сальто
Человек делая сальто давлением ступней на датчики силы ступней дает момент вращения телу и экзоскелету с 3D-КАРДАНОМ. По цифрам датчиков силы ступней софт усиливает момент 3D-КАРДАНА по таблице решений «вертикальная составляющая силы толчка ногами – момент 3D-КАРДАНА» – человек делая сальто не чувствует инерцию экзоскелета, 3D-КАРДАНА. Экзоскелет делает сальто по шаблону.
Момент 3D-КАРДАНА = момент от человека умножить на коэффициент момента. Коэффициент момента – отношение момента инерции экзоскелета с 3D-КАРДАНОМ и человеком к моменту инерции человека. Таблицы решений привязаны к весу человека, к силе тока приводов 3D-КАРДАНА.
Передние датчики силы ступней человека увеличивают цифры, задние уменьшают – 3D-КАРДАН наклоняет человека назад
БЕГ АНДРОИДА
Алгоритм Безопасности Бега Андроида АББА обнаружит – сигнал от человека уронит андроида – АББА включит собственный алгоритм бега андроида, подгоняя скорость андроида к цифрам сигнала от человека. АББА не дает превысить критические углы, угловые скорости вертикали андроида в беге. Человек чтоб уронить андроида делает кистью жест «РУЧНОЕ УПРАВЛЕНИЕ»
АББА – ХОДЬБА АНДРОИДА
Человек задает длину частоту высоту шага, угол колена в нулевой точке шага, наклон туловища. Остальное андроид берет с своего датчикового алгоритма ходьбы, бега.
Продольный критический угол туловища – угол между вертикалью и проекцией на продольную вертикальную плоскость бега андроида линии, соединяющей центр масс андроида и точку опоры ступни в момент максимальной силы толчка этой ступни.
Продольный критический угол туловища меньше нормы (наклон слишком назад) – алгоритм уменьшит угол колена в нулевой точке шага.
Продольный критический угол туловища больше нормы (наклон слишком вперед) – алгоритм увеличит угол колена в нулевой точке шага.
Нулевая точка шага – точка в которой приземление с торможением переходит в разгон: продольное ускорение центра масс туловища равно нулю.
Продольная вертикальная плоскость бега – вертикальная плоскость проходящая через центр масс андроида и параллельная вектору движения андроида.
Левый поперечный критический угол туловища – угол между вертикалью и проекцией на поперечную вертикальную плоскость бега андроида линии, соединяющей центр масс андроида и точку опоры левой ступни в момент максимальной силы толчка ступни.
Поперечная плоскость бега – вертикальная плоскость проходящая через центр масс андроида и перпендикулярная продольной плоскости бега.
Правый поперечный критический угол туловища – угол между вертикалью и проекцией на поперечную вертикальную плоскость бега андроида линии, соединяющей центр масс андроида и точку опоры правой ступни в момент максимальной силы толчка ступни
АЛГОРИТМ ПРОДОЛЬНОГО, ПОПЕРЕЧНОГО УГЛОВ СТУПНИ шагающего аватар-андроида работает независимо (исключения: установки человека) от человека:
1. поперечный угол ступни стремится к нулю. Алгоритм-1 управляет жесткостью подвески ограничителя отклонения от нуля поперечного угла ступни, графиком (зависимости жесткости подвески от её хода) прогрессивной подвески. Жесткость подвески нарастает при увеличении скорости ходьбы (бега) андроида, при уменьшении процентной вязкости поверхности куда приземляется ступня. Алгоритм-1 управляет поперечным углом ступни по цифрам 2-х передних датчиков силы ступни.
2. в ходьбе (беге) андроида на поворотах поперечный угол ступни устанавливают датчик поперечного ускорения андроида, два передних датчика силы ступни.
3. продольный угол ступни имеет в таблицах решений стандартную цифру угла. Цифра зависит от скорости ходьбы (бега) андроида и наклона голени от поперечной вертикальной плоскости андроида, от процентной вязкости (таблицы решений) поверхности приземления ступни. Алгоритм-2 дает стандартную цифру продольного угла ступни.
Ступня андроида имеет сгибающийся вверх носок. Два тросовых привода носка могут сгибать его передний конец вправо-влево в горизонтальной продольной оси, чтоб андроид мог балансировать на одной ноге, сохраняя боковую устойчивость.
4. есть прогрессивная подвеска ограничителя продольного отклонения ступни андроида от цифры алгоритма-2 по наклону голени к вертикали. Прогрессивная подвеска ограничителя продольного отклонения ступни андроида регулируется отдельно по вертикальному ходу подвески, отдельно по продольному ходу подвески назад при продольном столкновении ступни с препятствием
АЛГОРИТМ РОВНОЙ ХОДЬБЫ, БЕГА – туловище андроида заваливается вбок-влево (вправо) от выбранного пути – увеличить силу и время опоры на левую (правую) ногу, уменьшить на другую
СИМУЛЯЦИЯ ТОЛЧКОВ В СТУПНЯХ ЧЕЛОВЕКА
Сзади голени андроида датчики поверхности пола – инфракрасные высотомеры измеряют расстояние «пятка – земля». Луч идет вдоль продольной оси голени. При касании ступни андроида земли, экзоскелет ноги по сигналу обратной связи резко толкает вверх-назад ступню человека, симулируя суммарный (по датчикам ступни андроида) вектор силы реакции опоры.
По сигналу датчика поверхности пола андроида активная 3D-подвеска экзоскелета перед приземлением ступни по алгоритму медленно опускает туловище человека, чтоб в момент толчка ступни андроида активная 3D-подвеска подбросила вверх-вперед ступню человека, симулируя вертикальные ускорения андроида в беге.
При максимальном ходе активной 3D-подвески 15см от среднего значения и малом расстоянии рук и ног человека от 3D-КАРДАНА, софт приводами сгибает руки или ноги человека чтоб он не ударился об 3D-КАРДАН. Полный ход активной 3D-подвески от упора до упора 30см.
Алгоритм активной 3D-подвески в период-1 времени между приземлением и точком вверх ступни опускает человека на 15см вниз, чтоб 30см хватило симулировать нагрузки ступни человека в момент «касание ступни + толчок». Период-1 – по сигналу обратной связи.
В режиме «ПРОГНОЗ» алгоритм дает толчок в ступню человека раньше на время упреждения. Человек колесиком Виртуальной системы управления устанавливает процентную зависимость «средняя задержка управления за 3 шага андроида – время упреждения». Время упреждения по таблицам решений зависит от скорости андроида
СИМУЛЯЦИЯ УСКОРЕНИЙ КОСТЮМОМ ТЕЛЕПРИСУТСТВИЯ:
1. андроид берет груз на правое плечо – в датчиках правой ступни сумма сил больше, чем у левой ступни. По сигналам датчиков силы ступней андроида алгоритм наклоняет человека вправо по таблицам решений «процентная разница цифр в ступнях – угол наклона вбок костюма телеприсутствия»,
«процентная разница цифр в ступнях – угловая скорость наклона костюма телеприсутствия»,
«скорость роста суммы сил правой ступни – угловая скорость наклона вбок костюма телеприсутствия»
2. андроид прыгает вниз – его датчик невесомости (ускорение по вертикали) дает сигнал – активная 3D-подвеска плавно двигает вниз экзоскелет туловища для максимума длины хода вверх человека в симуляции перегрузки от приземления андроида
3. андроид прыгает вверх – активная 3D-подвеска двигает человека вверх для максимума длины хода вверх человека в симуляции перегрузки от приземления андроида
4. при приземлении ступни в ходьбе, беге, прыжке экзоскелет ступни резко подбрасывает её вверх, симулируя нагрузку как в ступне андроида. Обратный ход подвески медленный. Скорость обратного хода подвески: таблицы решений по скорости, времени невесомости и тормозному ускорению
5. разгон вперед – андроид наклоняется назад. По сигналу 3D-гироскопа туловища андроида костюм телеприсутствия наклоняет человека назад на этот угол. Человек инстинктивно наклоняет себя вперед, обнуляя угловую скорость туловища андроида от горизонтальной оси.
Для уменьшения задержки управления человек включит алгоритм автоматического наклона андроида вперед при ускорении. Виртуальной системой управления человек выберет цифры алгоритмов автоматического наклона андроида
6. андроид тормозит – костюм телеприсутствия наклонит человека вперед. Человек инстинктивно наклоняет туловище назад, обнуляя угловую скорость туловища андроида от горизонтальной оси.
Для уменьшения задержки управления человек включит алгоритм автоматического наклона андроида назад при торможении
7. наклоном вперед или назад на угол 90° костюм телеприсутствия симулирует максимальное ускорение 1g. Ещё 1g может добавить активная 3D-подвеска экзоскелета
8. центробежную силу андроида в повороте симулирует наклон человека вбок. Алгоритм андроида уравнивая нагрузку на ступни сгибает колени разными углами, наклоняет андроида на повороте в сторону противоположную центробежной силе по таблицам решений «центробежная сила – угол наклона андроида вбок», «скорость роста центробежной силы – угловая скорость наклона андроида вбок». Этот алгоритм человек может заблокировать переносом веса на 1 ступню
9. при росте бокового наклона поверхности ходьбы датчик угла наклона андроида дает угол, угловое ускорение экзоскелету туловища. Чтоб не упасть вбок человек инстинктивными движениями сохраняет устойчивость положения андроида, обнуляя угловую скорость туловища.
Для уменьшения задержки управления человек включит алгоритм автоматического наклона андроида
10. в тормозящем автобусе датчик угла наклона туловища стоячего андроида передает угол, угловую скорость экзоскелету туловища. Чтоб не завалиться вперед человек наклоняется назад до обнуления угловой скорости туловища андроида по его датчику угла наклона. Аналогично при разгоне автобуса.
Для уменьшения задержки управления человек включит алгоритм автоматического наклона андроида
11. слалом на лыжах симулируют наклоны осей 3D-КАРДАНА, активная 3D-подвеска экзоскелета. Естественные наклоны экзоскелета уменьшают вероятность морской болезни
АЛГОРИТМ СИМУЛЯЦИИ НЕВЕСОМОСТИ – вектор движения рук, ног сохраняется с плавным торможением движения на расстоянии ~10% от диапазона движений, затем полная компенсация софтом веса рук, ног, всех моментов от механизмов. Угловые скорости вращения движения туловища сохраняются по 3 осям
ДИСТАНЦИОННЫЕ ЕДИНОБОРСТВА В КОСТЮМАХ ТЕЛЕПРИСУТСТВИЯ
База системы координат костюма телеприсутствия – точка-О в центре отрезка соединяющего центры объективов телекамер + вертикаль проходящая через точку-О. Поверхность пола софт вычисляет по настройкам экзоскелетов + 2-3 точки контакта спортсменов (захваты руками, подсечки). Взаимное положение тел в пространстве – по углам экзоскелетов, по весу и векторам импульса приложенных к точкам удара, толчка.
Для передачи векторов движения рук, ног, туловища обоих человеков софт объединяет их общей местной системой координат по:
1. по сигналам силовой обратной связи. Сила реакции опоры всегда в одной прямой с породившей её силой
2. по форме их тела по цифрам настройки экзоскелета
3. координаты ключевых точек их тел софт вычисляет синусно-косинусными уравнениями по цифрам видеосигнала стереокамер.
Человек-1 толкнул человека-2 – софт по углам их пальцев, ладоней, рук, ног, по цифрам датчиков наклона и ускорения их туловищ вычисляет их взаимное положение, объединяет их местные системы координат. Софт – список алгоритмов связанных между собой обратными связями по цифрам таблиц решений.
Вектор импульса удара – величина суммарного вектора удара по датчикам ускорения туловища и длительности удара. Высоту точек тела софт вычисляет по углам экзоскелета и наклону туловища в двух осях от вертикали.
В расчетах:
1. цифры датчиков силы ступней. Сопротивление, реакции контактной опоры передают приводы экзоскелетов
2. силы действующие на 2-3 точки контакта (захваты, подсечки). Сопротивление, реакции контактной опоры передают приводы экзоскелетов
3. импульсы от ударов, толчков. Сопротивление, реакции контактной опоры передают приводы экзоскелетов
4. траектории тел спортсменов дают активная 3D-подвеска экзоскелета, 3D-КАРДАН, 3D-датчики ускорений экзоскелета туловища, сохраняя систему координат при потере контакта между спортсменами.
5. по силе тока в муфтах сцепления группового привода софт вычисляет вес тел, их центр масс, моменты инерции в 3 осях, положение тел после приема.
В режимах «ПРОГНОЗ», Виртуальная реальность команды 3D-КАРДАНУ дают датчики ускорения экзоскелета туловища, 3D-датчики силы ступней (векторы силы в ступне).
Используя виртуальные модели тел в общей системе координат, софт вычисляет контактные силы в точках контакта виртуальных тел. Софт двигает в направлении вектора силы тело того партнера, у которого меньше горизонтальная контактная сила датчиков силы ступней. Применение силы партнером-1 софт передает партнеру-2 приводами его экзоскелета.
Если партнеры сталкиваются в встречных ударных прыжках, софт складывает векторы их встречных импульсов. Софт двигает в направлении суммарного импульса тело того партнера, у которого импульс меньше.
Импульс – это масса тела умножить на его скорость. Цифру массы тела дают датчики силы экзоскелетов ступней. Цифры горизонтальной скорости прыжка партнера дает общая система координат и три 3D-датчика ускорения экзоскелета туловища.
При вычислении контактных сил софт применяет
Стандартную модель сминаемости тела человека, делящую поверхность тела на стандартные зоны смятия тела. У каждой стандартной зоны своя систему координат, в которой начало системы координат – входящая в центр зоны линия перпендикулярная поверхности зоны. Для вычисления сигнала приводам одного из экзоскелетов, софт для каждой стандартной зоны смятия тела берет с таблиц решений:
1. стандартный график роста силы сопротивления тела смятию в глубину
2. стандартный график роста силы сопротивления тела продольному сдвигу
3. стандартный график роста силы сопротивления тела поперечному сдвигу
Партнеры в единоборствах – виртуальные аватар-модели известных спортсменов. Продажа, аренда их аватар-моделей – отдельный бизнес
ДИСТАНЦИОННЫЙ СЕКС МУЖЧИНЫ С ЖЕНЩИНОЙ
Аналогичны вычисления серверного софта для дистанционного секса между мужчиной и женщиной в костюмах телеприсутствия. Софт создает виртуальные модели их тел по цифрам настройки их экзоскелетов.
Виртуальные модели тел софт соединяет общей системой координат, в которой вычисленные поверхности виртуальных тел прикладывают друг на друга силу в точках контактной силы.
Софт сравнивая контактные силы тел партнеров, двигает в направлении суммарного вектора импульса двух тел того партнера, у которого контактный импульс меньше. Контактный импульс софт вычисляет по массе тела, по цифрам трех 3D-датчиков ускорений экзоскелета туловища + ускорение свободного падения (сила тяжести). Вычисления раздельно по каждой из трех осей системы координат XYZ.
Цифру перемещения точки контактной силы софт вычисляет по сумме векторов импульса в точке контактной силы. Импульс партнера-1 софт передает партнеру-2 приводами его экзоскелета. Вертикальные ускорения двух тел софт вычисляет по цифрам 3D-датчиков ускорений экзоскелета туловища.
При вычислении контактных сил софт применяет одну из Стандартных моделей сминаемости тела человека. Стандартную модель сминаемости тела человека выбирают партнеры или софт.
При пропадании сигнала, задержке управления включается режим «ПРОГНОЗ». Алгоритмы прогноза общие в обоих костюмах телеприсутствия.
Секс-партнеры – виртуальные аватар-модели известных исторических личностей. Продажа, аренда их аватар-моделей – отдельный бизнес.
Максимальная Тактильная Система МТС костюма телеприсутствия – это костюм из растягивающейся ткани с вибрационными тактильными матрицами-передатчиками. Человек чувствует ветер с его температурой, мелкий дождь накапывающий на андроида с тактильными матрицами-приемниками с передачей вектора силы. МТС в дистанционном сексе мужчины и женщины передает вибрационным способом тактильные пятна прикосновений ладоней. Тактильное разрешение кожи человека 2мм.
Костюм МТС имеет приводы:
1. тактильные матрицы с пьезоэлектрическим или магнитострикционным приводом, передающие рост силы ростом амплитуды и частоты вибрации
2. кольцевой привод, обжимающий по диаметру руку, ногу, туловище
На ноге кольцевые приводы идут ступеньками-кольцами снизу верх через каждые 5мм высоты. Благодаря датчикам длины кольцевых приводов рук, ног, туловища пользователь костюма МТС может точно примерить на себе любую виртуальную одежду виртуальных магазинов Метавселенной, ходить или бежать в этой одежде, увидеть себя в экране с любого ракурса. Даже если сервер Метавселенной на Марсе.
АЛГОРИТМ ПОДЪЕМА ПО ВЕРТИКАЛЬНОЙ ЛЕСТНИЦЕ основан на распознавании изображений и датчиках ускорения туловища андроида. При задержке управления алгоритм поможет андроиду самому лезть по веревочной лестнице
УПРАВЛЕНИЕ РУКАМИ ЗА СПИНОЙ
Конструкция костюма телеприсутствия не дает двигать руками за спиной. Если надо – жест пальцами или голосовая команда включает режим «грудь – спина»: двигая руками спереди человек управляет руками андроида за его спиной – работа задних стереокамер. Правая нога андроида становится левой, левая правой. Человек ходит вперед – андроид идет назад
ТАБЛИЦЫ РЕШЕНИЙ ПРИВОДА АНДРОИДА
В сигнале силовой обратной связи «человек – андроид» частота опроса датчиков силы 5-50Hz (частота управления. зависит от задержки управления). В сигнале силовой обратной связи «андроид – внешняя среда» частота опроса датчиков силы 1000-2000Hz.
Уменьшится трафик связи – частота опроса датчиков обратной связи тоже уменьшится.
При росте задержки управления и сопротивления внешней среды андроида, софт уменьшает силу андроида пока человек не реагирует на рост сопротивления среды андроида. Для уменьшения расхода энергии и безопасности людей рядом с андроидом.
Софт уменьшает силу андроида по таблицам «задержка управления – процентный рост сопротивления среды – сила андроида». Выбор профессиональной (сапер, хирург, рукопашный бой, грузчик...) библиотеки таблиц решений силовой обратной связи «андроид – внешняя среда»

3D-КАРДАН ЭКЗОСКЕЛЕТА
Ось-1 3D-КАРДАНА вращается в диаметральной оси кольца оси-2 3D-КАРДАНА. Ось-2 3D-КАРДАНА перпендикулярна оси-1 3D-КАРДАНА.
На старте ось-1 3D-КАРДАНА проходит вертикально через центр масс человека.
Ось-1 3D-КАРДАНА – полукольцо, в середине которого ось-4 3D-КАРДАНА (пересекает центр масс человека). Ось-4 3D-КАРДАНА перпендикулярна оси-1 3D-КАРДАНА.
На старте ось-4 3D-КАРДАНА сзади человека продольно горизонтально.
Сбоку нижнего полукольца оси-1 3D-КАРДАНА привод «труба-винт – гайка скольжения» поворачивает ось-4 3D-КАРДАНА на угол 45° в обе стороны.
Ось-2 3D-КАРДАНА на старте имеет поперечную горизонтальную ось. На старте кольцо оси-2 3D-КАРДАНА и ось-1 3D-КАРДАНА в одной поперечной вертикальной плоскости. Ось-2 3D-КАРДАНА вращается в подшипниках скольжения в концах рогов полукольца оси-3 3D-КАРДАНА.
Неподвижная ось-3 3D-КАРДАНА самая дальняя от человека, расположена продольно горизонтально. Ось-3 3D-КАРДАНА вращается в подшипниках скольжения напольной рамы костюма телеприсутствия. Все оси 3D-КАРДАНА пересекают человека в районе его центра масс
ИЗГОТОВЛЕНИЕ ПОЛУКОЛЕЦ ОСЕЙ 3D-КАРДАНА
Полукольца осей 3D-КАРДАНА имеют вид половинки квадрата с скругленными углами. Полукольца осей 3D-кардана состоят с жесткого пенометалла обмотанного на клею углеволокном по линиям действия сил. В центре сечения пенометалла паз для сигнального и силового коаксиальных кабелей. Кабели идут к вращающемуся трансформатору, электрически соединяющего цепи вращающихся осей 3D-КАРДАНА.
Пенометалл состоит с двух длинных половинок, вдоль которых фрезеруют паз. В паз укладывают кабеля с электромагнитныи экраном. Пенометалл с высокой электрической и магнитной проводимостью – электромагнитный экран. Обе половинки пенометалла склеивают. Кабеля внутри. Робот по программе с натягом обматывает пенометалл высокомодульным углеволокном. Автоклав.
ДВУХПЛОСКОСТНАЯ ЦЕПЬ
Для перехода цепи от звездочки электромотора привода на звездочку оси-3 3D-КАРДАНА с поворотом плоскости вращения цепи на угол 90° я изобрел двухплоскостную цепь с двумя плоскостями вращения на основе последовательно соединенных карданных шарниров. Единичное звено цепи из двух не полностью собранных карданных шарниров соединенных между собой стержнем длиной ~1-3 диаметра карданного шарнира.
Все двухплоскостные цепи осей 3D-КАРДАНА по звездочкам осей 3D-КАРДАНА идут в Модуль приводов 3D-КАРДАНА в задней части костюма телеприсутствия
МОДУЛЬ ПРИВОДА 3D-КАРДАНА
На 4 оси 3D-КАРДАНА 4 электромотора диаметром 2,4м. Они вращают оси-1-2-3-4 3D-КАРДАНА по сигналу угловой обратной связи с датчиком наклона и 3D-гироскопом туловища андроида. При торможении электромоторов Модуля привода 3D-КАРДАНА их энергию регенерируют обмотки электромотора.
Регенерацию электроэнергии софт выполняет коммутацией секций обмоток электромотора и муфт сцепления силовыми транзисторами – меняется индуктивное сопротивление. В режиме регенерации электроэнергии трехфазная обмотка электромотора работает как одна общая однофазная обмотка с повышенным числом витков. В режиме регенерации электроэнергия с одних электромоторов и муфт сцепления перекачивается в другие, используя их индуктивность накопителем энергии
ВАРИАНТ-2 ПРИВОДА ОСЕЙ 3D-КАРДАНА
Цепной привод-1 соединяет ось-2 3D-КАРДАНА с двумя электромотор-маховиками оси-3 3D-КАРДАНА.
Цепной привод-2 через промежуточные звездочки и цепь соединяет ось-1 3D-КАРДАНА с двумя электромотор-маховиками оси-3 3D-КАРДАНА
Транзисторная муфта сцепления – это постоянно вращающийся электромотор-маховик. Электромотор-маховик – это ротор с трехфазной обмоткой для привода оси 3D-КАРДАНА. Снаружи электромотор-маховика на подшипниках диск статора. К диску статора прикреплена труба-статор. В трубе-статоре изнутри приклеены постоянные магниты. Труба-статор снаружи, с небольшим зазором, охватывает ротор электромотор-маховика. Труба-статор – это выходной вал транзисторной муфты сцепления, вращающей ось 3D-КАРДАНА.
Трехфазная обмотка ротора имеет в каждой фазной обмотке два закорачивающих (в оба направления тока) её транзистора. Не закороченные обмотки статора не вращаются от электромотор-маховика-ротора.
Сигнал управления 3D-КАРДАНОМ, одновременно закорачивая (замыкая) все обмотки ротора, создает в них ток наведенный электромагнитной индукцией от постоянных магнитов электромотор-маховик из-за взаимного движения. Магнитное поле от тока в обмотках сцепляет электромотор-маховик-ротор с статором. Это изобретенная мной быстродействующая транзисторная муфта сцепления.
Сигнал управления транзисторной муфтой сцепления меняя частоту, период короткого замыкания обмоток электромотор-маховика-ротора плавно управляет 0-100% пробуксовкой (скольжением) сцепления электромотор-маховик-ротора с статором. Транзисторы коротко замыкают, размыкают обмотку. Для точного управления сцеплением точные порции тока обмотки отмеряет линейка конденсаторов.
Часть регенерированной в транзисторных муфтах сцепления электроэнергии после выпрямления идет в кабель постоянного тока в осях 3D-КАРДАНА. Все оси 3D-КАРДАНА обмениваются энергией между собой по вращающимся трансформаторам.
2 электромотор-маховика противоположного вращения, моментом от разгона и торможения вращают 4 оси 3D-КАРДАНА не передавая крутящий момент на пол дома. Два электромотор-маховика вращают человека угловой обратной связью с датчиком наклона и 3D-гироскопом туловища андроида.
Регенерированная торможением электромотор-маховика-1 (режим муфты сцепления) энергия разгоняет электромотор-маховик-2 противоположного вращения. Момент от разгона электромотор-маховика-2 тоже крутит человека в том же направлении вращения в 3D-КАРДАНЕ. Электромотор-маховики переключаются с режим муфта сцепления в режим электромотор и обратно.
Обмен энергией между электромотор-маховиками (при стопроцентных КПД режима муфты сцепления, подшипников) теоретически позволяет с перегрузками вращать человека в любые стороны без затрат энергии. Затраты энергии меньше при управлении индуктивным сопротивлением обмоток (коммутация секционированных обмоток). КПД электромотор-маховиков – это отношение индуктивных сопротивлений ротора, статора в режиме «разгон – торможение с регенерацией энергии». Электроэнергия полученная обмотками транзисторной муфты сцепления, раскручивает электромотор-маховик. Можно в десятки раз уменьшить затраты энергии костюмом телеприсутствия на вращение человека в любых направлениях
ПРОТИВОФАЗНЫЙ РЕЖИМ ПРИВОДОВ 3D-КАРДАНА
Муфты сцепления приводов 3D-КАРДАНА 80-90% угла поворота осей по сигналу обратной связи дают в режиме максимальной мощности. 10-20% в режиме точной остановки. В режиме точной остановки приводы работают в противофазном режиме.
Противофазный режим в каждом периоде опроса датчиков замедляет 3D-КАРДАН для медленной подгонки приводами углов к сигналу угловой обратной связи 3D-КАРДАНА. Возникающую вибрацию гасит софт обратной связью с датчиками ускорения пружинных муфт.
Отключили электроэнергию – костюм телеприсутствия работает до 10 минут от инерции электромотор-маховиков. Рекуперация тормозных крутящих моментов электромотор-маховиками экономит энергию
При любых движениях андроида софт по 3 осям 3D-КАРДАНА повторяет на человеке углы вращения туловища андроида в местной системе координат. По сигналам трех 3D-датчиков углового ускорения туловища андроида и датчика наклона туловища от вертикали
ПОТЕРЯ СТЕПЕНИ СВОБОДЫ 3D-КАРДАНА
Совпали оси-1-3 3D-КАРДАНА – теряем 1 степень свободы. Чтоб не терять – ось-4 3D-КАРДАНА. На старте ось-4 3D-КАРДАНА сзади человека продольно горизонтально. Ось-4 3D-КАРДАНА в обе стороны вращает двухплоскостная цепь.
Сближаются углы осей-1-3 3D-КАРДАНА: Таблица синхронизации карданных углов вращает ось-4 3D-КАРДАНА синхронно с осью-3 3D-КАРДАНА: разница углов оси-4 и оси-3 3D-КАРДАНА всегда равна углу 45°
СУЦМ – СИСТЕМА УДЕРЖАНИЯ ЦЕНТРА МАСС ЧЕЛОВЕКА В ЦЕНТРЕ 3D-КАРДАНА
В экзоскелете туловища три 3D-датчика силы. Датчик-1 в передней части седла, датчик-2 сзади левого плеча, датчик-3 сзади правого плеча. Если в костюме телеприсутствия нет личного файла нового пользователя, костюм телеприсутствия после голосового предупреждения, приводами принуждает нового пользователя выполнить комплекс упражнений для записи в личном файле таблицы величины и вектора перемещения от туловища центра масс человека при разных положениях рук, ног.
Таблицы софт формирует по цифрам трех 3D-датчиков сил экзоскелета туловища человека. Таблицы определяют положение центра масс по углам рук, ног. По таблицам личного файла активная 3D-подвеска экзоскелета соединяет центр масс человека с центром пересечения осей 3D-кардана в любом положении тела человека. Частота опроса датчиков в системе СУЦМ от 30Hz в дешевых до 200Hz в дорогих моделях костюма телеприсутствия.
АКТИВНАЯ 3D-ПОДВЕСКА ЭКЗОСКЕЛЕТА групповым приводом линейно двигает человека в 3 осях пространства 30см от упора до упора, передает человеку линейные ускорения действующие на ступню при беге, вибрации; симулирует удары и толчки в единоборствах, автоматную очередь по бронежилету, удары мечом и копьем по доспехам, спуск космонавта с орбиты, 3D-ускорения в авторалли и мотокроссе. Угловые ускорения симулирует 3D-кардан.
Активная 3D-подвеска экзоскелета балансирует оси-1-4 3D-КАРДАНА, двигая человека в всех направлениях, соединяя его центр масс с центром осей 3D-КАРДАНА. Движения активной 3D-подвески в каждой оси координат уравновешено противостоящими пружинами в обоих направлениях. Активная 3D-подвеска экзоскелета участвует в установке длины экзоскелета туловища, снижает вероятность морской болезни
АКТИВНАЯ 3D-ПОДВЕСКА ЭКЗОСКЕЛЕТА двигает экзоскелет и Модуль группового привода в противоположных направлениях.
Реактивную силу отдачи от движения экзоскелета вперед-назад компенсирует движение Модуля группового привода в противоположном направлении.
Реактивную силу отдачи от движения экзоскелета вверх-вниз компенсируют противовесы-Р1-Р2 сзади спины над плечами.
Реактивную силу отдачи от движения экзоскелета вправо-влево компенсируют противовесы-Т1-Т2 за спиной справа, слева талии
АКТИВНАЯ 3D-ПОДВЕСКА ЭКЗОСКЕЛЕТА: линейное движение экзоскелета вперед-назад
Для движения экзоскелета назад софт притягивает к Модулю группового привода все тросы. Обратно экзоскелет вперед, Модуль группового привода назад двигают углепластиковые рессоры.
Передняя рессора-1 толкает экзоскелет назад. Рессора-1 опирается на вертикальную прямоугольную трубу-М1.
Задняя рессора-2 расположена между экзоскелетом и Модулем группового привода, отталкивает их друг от друга.
Скорость рессоры регулирует электромагнитный амортизатор-А в режиме регенерации электроэнергии. У каждой рессоры свой амортизатор-А. Человек тяжелее среднего веса – амортизатор-А уменьшает скорость движения рессоры с стороны Модуля группового привода, чтоб реактивная сила не двигала 3D-КАРДАН экзоскелета.
Человек легче среднего веса – амортизатор-В уменьшает скорость движения рессоры с стороны экзоскелета. У амортизаторов отрицательная обратная связь с датчиком осевого ускорения неподвижной оси-4 3D-КАРДАНА экзоскелета
Модуль группового привода экзоскелета в направляющих-М1-М2. Направляющая-М1 – вертикальная прямоугольная труба, под углом 90° приваренная снаружи сверху к трубе-1. Труба-1 вращается в неподвижной горизонтальной цилиндрической оси-4 3D-КАРДАНА.
Направляющая-М2 – вертикальная прямоугольная труба-М2 – ось вертикальна, отверстие сверху. Вертикальная прямоугольная труба-М2 вставлена снаружи вертикальной прямоугольной трубы-М1. Труба-М1 в сечении: длина ~120см, ширина 9см – отверстие сверху.
В продольном направлении длина горизонтального сечения прямоугольной трубы-М2 больше длины сечения прямоугольной трубы-М1, чтоб Модуль группового привода двигался в продольном горизонтальном направлении снаружи вертикальной прямоугольной трубы-М1. Двигаться вверх по трубе-М1 труба-М2 не может
Привод трубы-1: в задней части трубы-1 звездочка-1. Звездочку-1 вращает двухплоскостная цепь с Модуля привода 3D-КАРДАНА через звездочки разного диаметра в осях 3D-КАРДАНА. Труба-1 вращает экзоскелет в продольной горизонтальной оси
Рама экзоскелета туловища в направляющих-Э1-Э2. Направляющая-Э1 – прямоугольная труба-Э1, двигающаяся снаружи по передней части неподвижной вертикальной трубы-М1. Задняя часть сечения сборной трубы-Э1 входит в боковой вырез длиной и высотой 16см в передней части трубы-М1.
Направляющая-Э2 – закрепленные в раме экзоскелета туловища две жесткие продольные пластины-Э, прижатые к нижней части снаружи прямоугольной трубы-М2. Пластины-Э как направляющие двигаются горизонтально продольно вдоль нижней части вертикальной прямоугольной трубы-М2.
Ось-D: к прямоугольной трубе-М2 сверху горизонтально поперечно приварена длинная ось-D в которой вращаются Электромотор-маховики-1-2 Модуля группового привода. Модуль группового привода идет горизонтально назад вместе с осью-D в продольном горизонтальном вырезе трубы-М1 для оси-D.
Левая половина оси-D – ось-D1 на которой по часовой стрелке вращается Электромотор-маховик-1.
Правая половина оси-D – ось-D2 на которой против часовой стрелки вращается Электромотор-маховик-2
АКТИВНАЯ 3D-ПОДВЕСКА ЭКЗОСКЕЛЕТА: линейное движение экзоскелета вправо-влево, верх-вниз
В районе задней части экзоскелета в вертикальной плоскости квадратная рамка-1. К ней прикреплен экзоскелет. Сзади Рамки-1 на расстоянии 28см ось-2, закрепленная в направляющей-М2.
Ось-2 – ось параллелограммного механизма двигающего экзоскелет верх-вниз.
Ось-1 – это нижний горизонтальный поперечный стержень Рамки-1.
Оси-1-2 – оси параллелограммного механизма двигающего экзоскелет верх-вниз.
На оси-1 снаружи левая трубка-Л и правая трубка-П.
К левому концу трубки-Л приварена вертикальная труба-рычаг-2ЛВ длиной 28см.
К правому концу трубки-П приварена вертикальная труба-рычаг-2ЛВ длиной 28см.
На трубе-рычаге-2ЛВ снаружи вращается вертикальная труба-2ЛВ с осевым подшипником скольжения снизу. Наверху трубы-2ЛВ под углом 90° приварена продольная горизонтальная труба-ПГ.
Труба-ПГ рычагом с карданами в его концах соединена с верхней частью трубы, вращающейся снаружи левого вертикального стержня Рамки-1.
Рядом с трубой-ПГ под углом 90° к ней приварена поперечная горизонтальная труба-ППГ длиной 28см. Труба-ППГ приварена к трубе-2ЛВ.
На трубе-ППГ снаружи вращается труба-ППГ2. В правом конце трубы-ППГ2 кардан-ППГ1. Рядом с ним кардан-ППГ2.
С карданом-ППГ1 соединена тросовая тяга Модуля группового привода.
С карданом-ППГ2 соединена другая тросовая тяга Модуля группового привода.
Принцип работы тросовой тяги-М1 изложен в статье «Привод тросовой тяги-ПТВ» выше по тексту.
Аналогично устроены правая сторона параллелограммных механизмов на основе квадратной Рамки-1.
Если карданы-ППГ1-ППГ2 левой части квадратной Рамки-1 двигать вперед-назад одинаково с их аналогами с правой стороны параллелограммных механизмов квадратной Рамки-1 – параллелограммный механизм двигает экзоскелет верх-вниз.
Если карданы-ППГ1-ППГ2 левой части квадратной Рамки-1 двигать противоположно направлению движения их аналогов в правой стороне параллелограммных механизмов квадратной Рамки-1 – параллелограммный механизм-1 двигает экзоскелет вправо-влево.
Карданы-ППГ1-ППГ2, их аналоги в правой стороне Рамки-2 двигают тросовые тяги шкивов-1-2-21-22 Модуля группового привода.
Шкивы-1-2-21-22 тросами двигают экзоскелет вправо-влево, верх-вниз параллелограммными механизмами квадратной Рамки-1
44 ТРОСА МОДУЛЯ ГРУППОВОГО ПРИВОДА ЭКЗОСКЕЛЕТА
Валы-НВ-НН: позади Электромотор-маховиков-1-2 сверху вал-НВ, снизу вал-НН. Вал-НВ горизонтально поперечно проходит сверху через прямоугольную трубу-М1 и приварен к ней. Вал-НН горизонтально поперечно проходит снизу через прямоугольную трубу-М1 и приварен к ней.
12 тросов с левых шкивов вала-НВ идут (горизонтально над Электромотор-маховиком-1) в левую плечевую группу тросов экзоскелета.
12 тросов с правых шкивов вала-НВ идут (горизонтально под Электромотор-маховиком-2) в правую плечевую группу тросов экзоскелета.
14 тросов идут в шкивы вала-НН. Вал-НН втрое короче вала-НВ. С вала-НН 14 тросов идут в группу шкивов центрального 3D-шарнира тазобедренного балансира. Далее по шкивам тазобедренного балансира тросы идут в экзоскелеты ног.
4 троса средней части Модуля группового привода идут в активную 3D-подвеску экзоскелета
Симуляция нагрузок на ступню, туловище человека
В ходьбе, беге при приземлении правой ступни андроида, привод подбрасывает вверх-назад экзоскелет ступни правой ноги человека. Человек мышцами сопротивляется толчку – туловище подпрыгивает вверх от мышц человека. Экзоскелет подпрыгивает вверх от приводов активной 3D-подвески экзоскелета.
Какую часть импульса движения вверх туловища возьмёт на себя активная 3D-подвеска экзоскелета определяет таблица решений «вектор импульса ступни андроида – вектор импульса экзоскелета». Три 3D-датчика ускорения туловища андроида корректируют выходной сигнал таблицы решений.
В Метавселенной на Луне её силу тяжести симулирует таблица Планетной коррекции сигнала активной 3D-подвески экзоскелета, уменьшая в 6 раз нагрузку от веса рук, ног, туловища человека.
Длины хода активной 3D-подвески экзоскелета не хватит передать импульс действующий на туловище андроида – активная 3D-подвеска серией коротких ударных импульсов в направлении вектора толчка симулирует длительное ускорение туловища человека от толчка.
После каждого ударного импульса активная 3D-подвеска медленно двигает человека в обратном направлении. Снова очередной ударный импульс
ИИ АКТИВНОЙ 3D-ПОДВЕСКИ ЭКЗОСКЕЛЕТА
Ход активной 3D-подвески экзоскелета 15см от среднего значения. В стереокартинке андроид бежит вперед – активная 3D-подвеска экзоскелета двигая человека назад, увеличивает длину тормозного хода активной 3D-подвески до 30см в симуляции торможения андроида.
В стереокартинке андроид падает вниз – активная 3D-подвеска двигает человека вверх, увеличивая длину тормозного хода активной 3D-подвески до 30см в симуляции приземления ногами
Активная 3D-подвеска экзоскелета по таблицам решений всегда соединяет центр 3D-КАРДАНА с центром масс человека при изменении положения рук, ног. При группировке человека его центр масс идет вперед от туловища – активная 3D-подвеска двигает человека назад, соединяя его центр масс с центром 3D-КАРДАНА по сигналу датчиков ускорений туловища андроида
БАЛАНСИРОВКА ОСИ-2 3D-КАРДАНА
Ось-2 3D-КАРДАНА балансируют 2 рычага-противовеса в концах рогов полукольца оси-2 3D-КАРДАНА. Противовес – электромотор-маховик, винтовым приводом двигающий тросами рычаги противовеса.
Рычаги противовеса по схеме «Цепной зажим равномерного прижима»: 2 соединенных шарнирами рычага. В шарнирных осях шкивы с тросами винтового привода. Балансировка оси-2 3D-КАРДАНА по принципу: дисбаланс уменьшает задержку управления 3D-КАРДАНА
Человек ощущая векторы ударов по андроиду, предотвратит его разрушение в рукопашном бою андроидов-солдат. По вектору удара от пуль, софт по сигналам разнесенных датчиков ускорения туловища андроида, покажет 3D-стрелкой в экране куда повернуть пулемет андроида в ответном огне. Или софт сам повернет пулемет
Векторы ударов по андроиду симулирует
3D-УДАРНИК ЭКЗОСКЕЛЕТА
Ударник – труба в центре которой наковальня-Ц. Наковальня-Ц – это жесткая пружина-Ц центр которой закреплен в центре трубы. В обоих концах трубы наковальни-1-2 в виде жестких пружин. Между наковальня-1 и молот-1 мягкая пружина-1. Мягкая пружина-2 между молот-1 и наковальня-Ц. Мягкая пружина-3 между наковальня-Ц и молот-2. Мягкая пружина-4 между молот-2 и наковальня-2. Молот – ударостойкий постоянный магнит.
Наковальня-1 имеет винтовой привод. Привод уменьшая расстояние между наковальня-1 и наковальня-Ц, увеличивает частоту ударника для уменьшения времени реакции и энергопотребления.
Увеличение импульса на экзоскелет: винтовые приводы увеличат расстояние между наковальнями-1-2. Молоты-1-2 идут в противоположных направлениях, убирая холостую вибрацию, шум.
Ударник – молот в направляющих между двумя мягкими пружинами. Обмотки-1-2 непрерывно раскачивают на пружинах молот. Молот колеблется между наковальнями-1-2 не касаясь их. Токами обмоток-1-2 управляет обратная связь с датчиком расстояния «молот – наковальня», предотвращая холостые удары.
Андроид получил удар – сигнал датчиков ускорения туловища андроида включает в обмотке-1 ударника экзоскелета дополнительный ток. Молот ударника бьёт наковальню-1, передавая удар человеку. Софт тормозит молот в режиме регенерации электроэнергии.
Включение режима регенерации электроэнергии: в 3D-УДАРНИКЕ 8 обмоток, которые в режиме удара силовые транзисторы соединяют параллельно. В режиме регенерации обмотки 3D-УДАРНИКА силовые транзисторы соединяют последовательно для увеличения индуктивности. Рост индуктивности повышает КПД регенерации (рекуперации) энергии.
Удар в противоположном направлении симулирует подача дополнительного тока в обмотку-2. Молот бьёт наковальню-2. Мягкие пружины не дают молоту бить наковальню без дополнительного тока в обмотку.
Вертикальный ударник двигает экзоскелет до 5мм в обе стороны в направлении «ноги – голова». Продольный ударник двигает экзоскелет до 5мм в обе стороны в направлении «грудь – спина». Боковой ударник двигает экзоскелет вбок до 4мм в обе стороны. Удары вбок: лыжи сбоку тросов не дают им выйти с шкивов группового привода.
3D-УДАРНИК дает человеку линейные ускорения на ступню при беге, вибрации; симулирует удары и толчки в единоборствах, автоматную очередь по бронежилету, удары мечом и копьем по доспехам. 3D-УДАРНИК экзоскелета снижает вероятность морской болезни
Удары, толчки, вибрацию софт симулирует приводами рук и ног, активной 3D-подвеской экзоскелета, 3D-КАРДАНОМ по библиотеке таблиц симуляции вибраций, толчков, ударов реальных источников. В таблицах 3 составляющих угловых колебаний вектора силы
СИМУЛЯЦИЯ БОКОВОГО УДАРА ПО ПРАВОЙ НОГЕ АНДРОИДА
Андроид получил боковой удар по правой ноге – софт включит нижний горизонтальный 3D-ударник экзоскелета и алгоритм «статуя» в правой ноге и тазобедренном модуле экзоскелета.
Алгоритм «статуя» – это при получении удара андроидом мгновенное включение максимальной силы в всех приводах экзоскелета при неизменности всех углов экзоскелета. Алгоритм «статуя» превращает экзоскелет в монолитный жесткий объект. Алгоритм «статуя» натянутыми тросами тазобедренного модуля передает экзоскелету правой ноги удар сбоку.
Нижний горизонтальный 3D-ударник экзоскелета соединен с тазобедренным модулем экзоскелета. Аналогично в экзоскелете правой руки софт симулирует боковой удар по правой руке андроида
ВИБРАЦИОННЫЙ СИГНАЛИЗАТОР ВЕКТОРА СКОЛЬЖЕНИЯ СТУПНИ АНДРОИДА
В наклонных скользких поверхностях человек не чувствует скольжения ног андроида. Сигнализатор вектора скольжения экзоскелета ступни дает человеку направление скольжения ступни андроида. В подошве экзоскелета ступни ударники-1-2-3.
Ударник-1 серией ударов в наковальню передает человеку продольное скольжение носка ступни андроида, ударник-2 – поперечное скольжение носка, ударник-3 – поперечное скольжение пятки. Ударники работают синхронно под управлением датчиков линейного ускорения ступней андроида.
Ступня андроида скользит вправо: молот (двигает правая обмотка) бьёт правую наковальню (малошумный сплав, шумоизолирующая подвеска). Сила ударов пропорциональна скорости скольжения ступни. Пружина возвращает молот назад. Повторы цикла. Режим холостого хода – молот не бьёт наковальню.
Сигнализатор передает только медленное движение ступни. Пороги скорости включения сигнализатора зависят от углов продольного и поперечного наклона нижней плоскости ступни. Скольжение больше углового разрешения 3D-кардана костюма телеприсутствия – 3D-кардан чуть вращает человека в сторону скольжения.
В носке, пятке ступни андроида датчики ускорения передают продольное, поперечное линейное перемещение ступни. В пятке андроида равносторонним треугольником левый и правый 3D-датчики силы, задний одноканальный датчик силы. Они по разнице цифр с датчиками ускорения туловища андроида передают человеку поперечное и продольное скольжение носка ступни, поперечное скольжение пятки. Без опоры ступни андроида на носок, пятку нет с них сигналов
ЦЕПНОЙ ЗАЖИМ РАВНОМЕРНОГО ПРИЖИМА
Рычаг-звенья-1-2-3-4-5 цепного зажима зажмут руку, ногу, туловище человека до стандарта силы в тросе (тяге). Большой диаметр секторного шкива троса у рычаг-звена-1. У рычаг-звена-2 диаметр секторного шкива троса меньше в столько раз, в сколько суммарная длина рычаг-звеньев-1-2 больше длины рычаг-звена-1.
Аналогичное отношение общей длины к диаметрам секторных шкивов остальных рычаг-звеньев дает одинаковую силу прижима каждого рычаг-звена цепного зажима к руке (ноге) одним общим тросом (разжимает рычаг-звенья пружина через 2-й общий трос). Цепной зажим равномерного прижима с равной силой зажимает все точки обхватываемой поверхности любой формы. Шкивы, тросы цепного зажима равномерного прижима можно заменить тягами.
Регулировочный винтовой привод двигает общий трос через пружинный рычажный механизм с прогрессивной характеристикой (типа задней подвески кроссового мотоцикла) силы прижима. Каждое рычаг-звено своим сегментом обхватит руку (ногу) любого размера. Обвившись вокруг руки (ноги) конец цепного зажима своими зубьями зацепляется с зубьями зажимной рамы.
Перед стартом руки человека в подлокотнике экзоскелета локтя. По силе датчика экзоскелета локтя регулировочный винтовой привод установит длину экзоскелета предплечья. Предплечье зажмет зажим у нижнего сустава
НАДУВНЫЕ ЗАЖИМЫ ЗА ДОПЛАТУ: камера-1 внутри внешней камеры-2. Камера-1 регулирует силу зажима зажимной камеры. Камера-2 дает осушенный воздух в вентиляционные отверстия зажимов рук, ног, туловища. Установки давления, температуры, влажности воздуха зажимов рук, ног, туловища по датчикам температуры, влажности. Выбор алгоритмов силы зажима. Зажимные рамы: пенометал (пеностекло) обмотан углеволокном по линиям действия силы
УСТАНОВКА ДЛИНЫ ЭКЗОСКЕЛЕТА ТУЛОВИЩА
Регулировочный винтовой привод двигает боковые, плечевые зажимы по направляющим. Плечевые цепные зажимы равномерного прижима опускаясь на плечи зажимают туловище спереди до нижнего ребра. Боковые цепные зажимы равномерного прижима зажимают туловище сбоку-спереди. Винтовые приводы зажимов отключают датчики силы по цифре силы. Вместо нижних зажимов туловища зажимы экзоскелета таза. Левый цепной зажим равномерного прижима экзоскелета таза, загибаясь вправо-вниз под углом 30° зажмет таз сбоку-спереди верхней левой боковой кости таза. Аналогично справа
В ТУЛОВИЩЕ АНДРОИДА три 3D-датчика ускорений, угловых скоростей (гиростабилизация телекамер). Андроид определяет скорость по датчикам туловища, по горизонтальной составляющей тормозного импульса ступни при приземлении на пол. Импульс раздельно по 3 осям координат определяют 3D-датчики силы ступни
В Виртуальной системе управления колесиками
ЭКВАЛАЙЗЕРА СИЛЫ (4 колесика: 4 диапазона скорости роста силы) человек установит усиление диапазонов сил, коэффициент дополнительного усиления от скорости роста силы. Настройки потери усиления (звуковые сигналы) диапазона веса опасного предмета (мины) по вертикали, горизонтали.
Переключение эквалайзера в режим
ЭКВАЛАЙЗЕР ВИБРАЦИЙ: фильтрация частотных полос вибраций, ударных и угловых ускорений пальцев, рук, ног, туловища. Человек выбрав модель ограничения ударных и угловых ускорений, уточнит цифры. Регистратор костюма телеприсутствия записывает углы, угловые ускорения, силы, скорости роста сил, амплитуды вибраций
Привод опускает на голову
ШЛЕМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ, фиксирует в экзоскелете туловища чтоб из-за движений головы не гнать 150кадр/сек, убрать 2 датчика угла наклона головы. У шлема ударопрочный корпус: касание шлема экзоскелетом блокирует софт. Сферический 3D-экран шлема по бокам сплющен на 10см для свободы движений рук.
За полупрозрачным 3D-экраном невидимо человеку-1 20 телекамер обратной связи передают человеку-2 в удаленном костюме телеприсутствия 3D-картинку лица человека-1. Каждая телекамера передает квадратный фрагмент лица, сферические искажения компенсирует софт. Границы квадратов калибруют проецируемой на голове человека световой сеткой с ячейкой 3мм. Лицо человека в лицевом экране андроида.
Для телекамер отраженный от матового экрана рассеянный свет. Лампы подсветки (по сценарию) лица, 3D-экран, телекамеры обратной связи работают импульсно раздельно во времени, не мешая друг другу. Софт видеокамеры экрана подгоняет 3D-картинку к положению зрачков человека.
Радиус 3D-экрана 30см: экзоскелеты рук не портят картинку. Дальше от глаз экран шлема – меньше морская болезнь от разницы «расстояние до экрана – до реального объекта». Искажения близких объектов в экране компенсирует софт по цифрам настройки фокуса камер андроида
Вариант-2: стереокартинку 3D-экрана дают 6 лазерных проекторов + очки с правой, левой круговой поляризацией стекол
ТЕЛЕКАМЕРЫ АНДРОИДА
У андроида вместо поворота головы гиростабилизированное по 2 осям переключение (по горизонтали, вертикали) ракурсных телекамер, строчек их матриц. Андроид не поворачивает голову с телекамерами. На разные длины фокуса и углы обзора у андроида 12 телекамер.
Поворот линии взгляда сложением строк кадров основной и дополнительной телекамер – получим на половину неподвижный фон кадра – сильнее сжатие видеосигнала.
У андроида 10 телекамер, 5 фокусных диапазонов (фокус-1-2-3-4-5) по дальности. В каждом фокусном диапазоне 2 стереокамеры определят расстояние до объекта. Длину каждого фокуса человек регулирует алгоритмом ИИ, колесиками Виртуальной системы управления или голосом.
Малый трафик: объектив большой светосилы, сверхмалая выдержка кадра снижают частоту кадров. Колесико регулировки выдержки кадра в Виртуальной системе управления.
Виртуальной системой управления человек улучшит распознаваемость картинки шлема вырезая видеоэквалайзером зашумленные полосы частот видеосигнала
Требования к разрешению стереокамер и точности датчиков вдвое ниже, если положение рук по датчикам углов и силы человек стыкует с картинкой телекамер. Можно включить исходный уровень освещения картинки по калиброванному фотоэлементу андроида
По стереокартинке андроида его правой, левой рукой могут одновременно управлять специалисты разных профессий с 2-х костюмов телеприсутствия
СИСТЕМА ОСВЕЩЕНИЯ В ТЕМНОТЕ
Вокруг лица андроида круг из светодиодов: двигая головой (сигнал датчиков положения головы) человек управляет их выключением с одной стороны, устанавливая направление светотеней лучше передающее в 3D-экране форму объекта. Виртуальная система управления: установки вращающегося вокруг лица андроида светового пятна. По скорости роста светотеней человек определит форму объекта
Режим «рассеянное освещение»: картинка телекамер андроида, где от вращающегося светового пятна освещения сохранены только максимальные цифры яркости каждого пикселя, немного усилен градиент яркости. Выбор графика усиления градиента яркости для рельефа картинки
Режим «картинка без помех»: освещение фемтосекундными световыми импульсами с включением оптического затвора телекамер только на время сверхкороткого возвращающегося отраженного светового импульса. Позволяет человеку в тумане и мутной воде детально рассмотреть объект, установив в сантиметрах время возврата импульса света
Вариант-2: у пленоптических (матрица линз: фокусирует софт) телекамер андроида софт фокусирует сигнал на нескольких устанавливаемых человеком диапазонах глубины резкости картинки
НАВИГАЦИЯ РОБОТА СТЕРЕОКАМЕРАМИ
Недостаток света: разносят дальше друг от друга лампы робота.
Избыток света: датчик света и софт управляют вектором поляризации картинки, уменьшают период снятия с пикселя сигнала:
1. период работы пикселя меньше времени кадра камеры
2. сигнал пикселя за время разности «время кадра – период работы пикселя» обнуляют
3. в движении робота по скорости роста угловых размеров объектов известного размера софт определяет (таблицы решений) координаты, пройденное расстояние.
3D-ЗВУК ШЛЕМА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ – точное воспроизведение любых векторов прихода звука.
Для каждого уха в шлеме полусферой 30 рупоров дающих звук через отверстия диаметром 2мм в экране шлема. Отверстие – трубка длиной 2мм подсвеченная изнутри светодиодами по цветам соседних пикселей 3D-экрана, чтоб отверстие не было видно.
Противофазные динамики снаружи шлема глушат шум для окружающих. Басы дает вентилирующий воздух зажимов рук (ног) электроклапанами. Ночью бесшумный для соседей ультразвуковой синтез биениями звука дает все векторы прихода звуков
Изобретенная мной система точного 3D-звука:
1. выходной сигнал 3D-звука – это в точке прослушивания мгновенный суммарный вектор воздушных потоков (волн), длина которого это суммарная цифра амплитуд звука по 3 осям пространства, передаваемая суммарным каналом 3D-звука.
2. проекции 3D-вектора звука на координаты пространства – это 3 канала 3D-звука, определяющих 3D-вектор прихода звука с его источника в звуковой картине.
3. вектор прихода звука вычисляется по балансу каналов синусно-косинусными уравнениями.
4. горизонтальный угол прихода звука: по разностному сигналу вертикальных мембран после накопления сигнала: в каждом диапазоне частот отдельный таймер накопления сигнала. Функции таймера, накопления сигнала выполняют софт или конденсаторы в цепи микрофона.
5. вертикальный угол прихода звука: по разностному сигналу горизонтальной мембраны 3D-микрофона и суммарного сигнала вертикальных мембран. Разностный сигнал – цифра после накопления сигнала: в каждом диапазоне частот отдельный таймер накопления сигнала. Функции таймера, накопления сигнала выполняют софт или конденсаторы в цепи микрофона.
6. полусферу прихода звука определяют по полярности разностных сигналов по принципу – звук идет с стороны полуволн сжатия. Полярность определит софт.
7. расположение источников (3D-векторы прихода звука) звука определяют по полярности сигнала: источник звука в направлении (3D-угол вектора прихода звука), в котором суммарная площадь полуволн сжатия воздуха по трем координатам максимальна.
8. углы 3D-вектора прихода звука определяют по отношению мгновенных амплитуд полуволн сжатия (воздуха) мембран микрофона.
3D-звук: в прослушиваемой точке-D пространства голова человека. Звуковая картина дает в точке-D мгновенный суммарный 3D-вектор движения воздуха. Все векторы движений воздуха от раздельных источников звука складываются в один мгновенный суммарный 3D-вектор движения воздуха, несущий в себе 100% информации о всех векторах звука.
3D-вектор движения воздуха раскладывают на проекции в 3 координатах пространства. Мгновенный вектор прихода звука софт определяет по соотношению мгновенных уровней громкости звука в проекциях на 3 координаты пространства.
В горизонтально расположенной звуковой картине 2D-вектор прихода звука. Если соотношению мгновенных уровней громкости звука между правой и левой колонками по 50% – источник звука посередине между колонками. 4 колонки по кругу вокруг человека.
Соотношение мгновенных уровней громкости звука 20% на левую колонку и 80% на правую колонку – источник звука в звуковой картине спереди под углом 35° справа от продольной горизонтальной оси проходящей через человека.
80% в левой задней колонке, 20% в правой задней колонке – источник звука под углом 35° слева сзади от продольной горизонтальной оси проходящей через человека.
В изобретенной мной самой экономичной в мире по трафику системе 3D-звука выходной сигнал 3D-звука всех каналов одинаков, отличаются только мгновенные уровни звука. Что дает изобретенной мной системе 3D-звука трафик ~6 раз меньше звука 7.1 и ~4 раза меньше звука 5.1
Угловая точность определения направления на источник звука выше чем в звуке 7.1 Качество звука в моей системе 3D-звука теоретически такое же как в звуке 7.1
Запись 3D-звука: 3D-микрофон: 3 максимально сближенные взаимно перпендикулярные мембраны + в отдельном корпусе взаимно перпендикулярные три бас-микрофона с фильтром вырезающим остальные частоты
ПЕРЕДАЧА 3D-ЗВУКА
нужен один 3D-микрофон или 3 совмещенных стереомикрофона. В совмещенных стереомикрофонах вредный для 3D-звука сдвиг фаз средних, высоких частот убирают уменьшением размеров мембран микрофонов и урезанием разностных сигналов
ВОСПРОИЗВЕДЕНИЕ 3D-ЗВУКА
4 динамика вертикальной плоскости спереди + 4 динамика вертикальной плоскости сзади дают любой мгновенный суммарный вектор прихода звука. В процессе воспроизведения звука человек слышит десятки векторов прихода звука одновременно.
Мгновенный суммарный вектор звука при непрерывном звучании мозг человека раскладывает на десятки разных векторов прихода звука. Информация о векторах звука распределена во времени также, как и в самом цифровом сигнале звука.
Мозг любого человека в любом случае разделяет, по времени прихода звуковой волны, несколько векторов прихода звука при условии, что длина волны звука примерно в 2-3 раза больше расстояния между ушами человека. Но в каждой точке пространства существует только 1 суммарный вектор прихода звука.
В 3D-наушниках 8 динамиков: 4 динамика в каждом ухе дают технически 4 вектора движения звуковой волны направленных встречно по диагоналям (угол 45° от вертикали) плоскости ушной раковины. Больше динамиков – выше угловая точность векторов прихода звуковой волны от источника в звуковой картине
БЕЗИНЕРЦИОННЫЙ ДИНАМИК
Чтоб динамики костюма телеприсутствия звучали как дорогая электростатическая звуковая колонка, инерцию излучателя компенсирует софт.
Мой алгоритм софта: звуковой сигнал разложим софтом или железом на 12 синусоидальных звуковых частот. В каждой частоте в положительной полуволне сжатия воздуха в поднимающейся ветви графика софт по коэффициенту N1 дает более крутой угол подъема. Падающую ветвь графика положительной полуволны сжатия воздуха софт по коэффициенту N2 делает более пологой.
Чтоб уместить обе ветви положительной полуволны на графике софт уменьшает длительность поднимающейся ветви графика полуволны, увеличивает длительность спадающей ветви. Синусоидальная форма полуволны звука превращается в почти трехугольную полуволну с резким нарастающей и плавно спадающей амплитудой.
Аналогичную операцию и с отрицательной полуволной разрежения в звуковом сигнале.
Остается звук с модифицированной положительной полуволной подать на динамик и регулятором графического интерфейса софта плавно на слух подобрать коэффициенты N1 и N2, затем эти же коэффициенты для отрицательной полуволны для каждой из 12 частот в отдельности. Можно это делать на слух и на выходном звуке эталонного музыкального файла.
Результат: динамик звучит как дорогая электростатическая звуковая колонка. Настройки можно в цифровой форме внедрить в систему звуковоспроизведения. Этот софт улучшит качество звучания любого звукового сигнала, если есть опыт обработки звука
ВЫДЕЛЕНИЕ КАНАЛА ЗВУКА
Человек повернув голову в сторону источника звука, автоматически усиливает звук в выбранном направлении, приглушая остальные каналы 3D-звука. Установки алгоритма выделения звука Виртуальной системой управления костюма телеприсутствия
Для передачи 3D-звука человеку андроид имеет 3D-микрофон на левом плече + 3D-микрофон на правом плече. Или 2 совмещенных стереомикрофона на левом плече + 2 совмещенных стереомикрофона на правом плече. У андроида мономикрофоны в ладонях, в нижней части бедер, справа и слева у талии для выделения звука в заданном направлении
Дальность источника звука определяют:
1. по разности амплитуд звука – накопление сигнала конденсатором – в каждом диапазоне частот отдельный таймер.
2. по времени прихода звука до разных микрофонов
3. по проценту (сравнение с эталонным аналог-сигналом) энергии верхних частот сигнала.
В Виртуальной системе управления костюмом телеприсутствия 1 колесико громкости и 3 колесика баланса (баланс звука по поперечной горизонтали + баланс звука по вертикали + баланс звука «передняя полусфера звука – задняя полусфера звука»). Направление движения колесиков совпадает с направлением регулировки баланса звука и роста уровня звука – можно быстро выделить колесиками вектор прихода звука для реакции военного андроида на опасную среду.
Вариант-2: джойстик выделения направления звука с кнопкой «реверс вектора прихода звука» с тактильным различением векторов звуковых полусфер (верхняя-нижняя или правая-левая). Колесики громкости, баланса звука.
Разницу частотных характеристик, чувствительности 3D-микрофонов андроида стандартным излучателем звука компенсирует софт. Дальность: чем ближе форма кривой звука микрофона к Z-графику ударной волны, тем дальше источник звука при равной громкости (таблицы решений).
Коэффициент близости формы кривой звука к Z-графику определяется накоплением выпрямленных четвертей-1-4 синусоиды верхней частоты звука в конденсаторе-1, накоплением выпрямленных четвертей-2-3 синусоиды верхней частоты звука в конденсаторе-2. Разность заряда конденсаторов-1-2 через время t пропорциональна расстоянию до источника звука
При телеуправление роботом возможна
МОРСКАЯ БОЛЕЗНЬ – тошнота, головокружение, усталость человека от:
1. большой скорости, амплитуды угловых колебаний ракурса картинки телекамер. Решение:
а)оптическая угловая стабилизация гироскопом ракурса телекамер робота
б)софт заменяет равномерную угловую скорость мгновенными скачками угла линии взгляда телекамер. Неподвижный фон, отсутствие угловой скорости в большей части времени улучшат самочувствие человека
2. несоответствия расстояния «глаз – объект в реале» расстоянию «глаз – экран шлема». Решение: экран в шлеме подальше от глаз человека
ИНТЕРНЕТ-ТРАФИК КОСТЮМА ТЕЛЕПРИСУТСТВИЯ:
1. общий трафик силовых, угловых каналов костюма телеприсутствия 56 кбит/с (7 Кб/с):
Каналы силы, скорости роста силы: 22 кбит/с: 6 бит на силу + 5 бит на скорость роста силы с периодом дискретизации 0,02с. Это в 40 тросах 12 кбит/с на силы + 10 кбит/с на скорости роста силы в 40 тросах
Каналы углов, угловых скоростей рук, ног: 34 кбит/с: 12 бит на угол + 5 бит на угловую скорость с периодом дискретизации 0,02с. Углы 40 тросов по сигналам датчиков перемещения троса: 24 кбит/с на углы + 10 кбит/с на угловые скорости. Удлинение тросов под нагрузкой компенсируем таблицами решений. Больше угловая скорость экзоскелетов рук, ног – больше частота передачи угла
Каналы углов, угловых скоростей 3D-кардана костюма телеприсутствия: 1,95 кбит/с: в среднем 7 бит на угол с периодом дискретизации 0,02с. Это 1,05 кбит/с на три угла кардана.
6 бит на угловую скорость с периодом дискретизации 0,02с. Это 0,9 кбит/с на 3 угловые скорости кардана.
Канал ускорений туловища по 9 каналам активной 3D-подвески экзоскелета: 2,3 кбит/с: 5 бит на канал датчика с периодом дискретизации 0,02с
2. Канал видео, сжатая 3D-картинка, 3D-звук: 1 Мб/с
3. Канал тактильный, обе кисти: 2,7 Мбит/с. Для работы андроида достаточно 2304 пикселя на 8 кончиков пальцев обоих кистей андроида, 3 бит на пиксель с периодом дискретизации 0,02с. На кончике пальца андроида тактильная матрица 48 х 48.
На теле человека 1млн тактильных пикселей. Тактильное разрешение пальца руки 1мм, кончика пальца 0,7мм. Порог чувствительности указательного пальца 0,2 г/мм2
В динамических сценах
АЛГОРИТМ «РАЗРЕШЕНИЕ ЭКРАНА – ЧАСТОТА КАДРОВ» при нехватке интернет-трафика подгонит видеобаланс «РАЗРЕШЕНИЕ ЭКРАНА – ЧАСТОТА КАДРОВ» к трафику: при превышении критической пиксельной скорости перемещения в картинке линий, алгоритм увеличит частоту кадров, уменьшив разрешение. При уменьшении пиксельной скорости движения линий в картинке, алгоритм увеличит разрешение картинки, уменьшит частоту кадров.
Видеоэквалайзером, видеобалансом, стереобазой, буферизацией человек управляет Виртуальной системой управления
ВИДЕО С ПЕРЕМЕННЫМ РАЗРЕШЕНИЕМ
При нехватке трафика передача видео с переменным разрешением. Определив по положению зрачков ракурс взгляда человека, софт отправляет сигнал андроиду. Софт андроида определяет точку-0 в кадре, куда смотрит человек. Вокруг точки-0 софт создает пиксельный круг с повышенным разрешением экрана. Установки диаметра круга, график уменьшения разрешения к краю круга. Софт по предыдущим кадрам дорисовывает картинку
ЭКОНОМИЯ ТРАФИКА
Телекамеры большой светосилы, малые выдержка и битность (алгоритмы) кадра. Рука андроида подняла предмет – софт временно уберет канал силы кисти, стабилизируя силу пальцев до появления боковой силы или больше 2% изменения вертикальной силы.
У медленно меняющихся цифр больше период дискретизации. Мало трафика – алгоритм приоритетным списком датчиков установит уровень процентной точности сигнала датчика. Приоритетный список тактильных матриц: мало трафика – алгоритм отключит матрицы с большим номером, затем номера поменьше. Сжатый трафик костюма телеприсутствия 1-8 Мб/с.
Алгоритм-К запоминая форму предмета в руках андроида, моделью формы предмета восстанавливает фрагменты пропущенного из-за помех сигнала обратной связи. Алгоритм-К экономит трафик передавая вместо полного сигнала предмета в руках андроида только опорные линии контакта с предметом. Полный сигнал восстановит софт.
КОСТЮМ ТЕЛЕПРИСУТСТВИЯ ИЗМЕНИТ ПРОТОКОЛ ИНТЕРНЕТА:
1. интернет разделят на сегменты малой, средней, большой (буферизация) двухсторонней задержки сигнала
2. переменная длина пакета интернет-сигнала. Короткие пакеты – минимум задержки управления и помех, длинные пакеты – минимум трафика
3. при ускорении движений алгоритм уменьшает число каналов пакета
БЕСШУМНАЯ НАПОЛЬНАЯ РАМА КОСТЮМА ТЕЛЕПРИСУТСТВИЯ
Рама на 4 активных 3D-амортизаторах, колеса с тормозами. 3D-амортизатор использует технологию описанных выше 3D-УДАРНИКОВ экзоскелета, у которых жесткая пружина-Ц заменена на более мягкую пружину. У каждой опоры 3 степени свободы для вектора вибрации. На 3 степени свободы вектора вибрации софт по таблицам решений использует 3 электромагнитных ударника с датчиком вибрации в каждом ударнике.
Таблицы решений имеют 3 канала обратной связи с датчиками вибрации в ударниках. 3D-амортизаторы не пропускают вибрацию на пол квартиры. Это технология бесшумной подвески паровой турбины, других агрегатов в бесшумных атомных подлодках.
Костюм телеприсутствия можно было сделать 50 лет назад
Костюм телеприсутствия – это 4 следящих манипулятора с силовой обратной связью в раме внутри 3D-кардана. В 1950-х Пентагон заказал General Electric костюм телеприсутствия для радиационной безопасности производства, техобслуживания роботами ядерной энергетической установки «Плутон» крылатых ракет.
2000-е: проблема радиационной безопасности производства, техобслуживания ядерной энергетической установки крылатой ракеты в России. От костюма телеприсутствия отказались.
2019г: в радиационной аварии погибло 5 конструкторов, 3 рабочих в подготовке испытания крылатой ракеты «Буревестник» с ядерной энергетической установкой.
1959г из-за проблем с радиацией Пентагон отказался от ядерной энергетической установки и костюма телеприсутствия.
1959г американец Ральф Мошер создал костюм телеприсутствия Handyman с силовой обратной связью – плечевая стойка с экзоскелетами рук.
Экзоскелеты рук имели силовую обратную связь в плече, предплечье, локте, двух пальцах руки. Человек через Handyman по проводной линии связи двуруким роботом упаковывал яйца не разбив их, мог раздавить мяч для гольфа, зажигал спичку, крутил обруч.
Handyman требовал в 1959г ~20 лет (как и андроид Asimo Honda) доработки до рыночного уровня. General Electric закрыла проект. За 66 лет после Handyman никто не сделал (нет финансирования) костюм телеприсутствия с силовой обратной связью на рыночном уровне, хотя по деньгам это самый прибыльный товар мировой промышленности в ближайшую тысячу лет.
Голливудские фильмы про костюм телеприсутствия и виртуальной реальности:
Суррогаты
Аватар
Периферийные устройства (сериал)
Тихоокеанский рубеж
Первому игроку приготовиться
Газонокосильщик
Газонокосильщик 2
Беглецы компьютерных сетей
Торговец сном
После этих фильмов мировой рынок виртуальной реальности готов окупить производство костюма телеприсутствия. Сотни миллиардов долларов вложенных в последние 40 лет в виртуальную реальность, по необъяснимым логикой причинам обходят разработку костюма телеприсутствия как костюма виртуальной реальности, который наполовину был готов ещё в 1959г.
Первые в мире публичные чертежи с описанием систем костюма телеприсутствия появились в 2012г в roboforum.ru Через 3 месяца форум (9 страниц с чертежами) удалили, после обращения автора форума Александра Попова (Вятка PR) к государству с просьбой помочь реализовать в металле костюм телеприсутствия.
Фонд перспективных исследований ФПИ России сделал вид что Александр Попов (Вятка PR) не присылал свою статью в ФПИ. Через месяц в 2012г все библиотеки Москвы бессрочно заблокировали самый популярный в России сайт про технику popmech.ru после ссылки в мой сайт в форуме «Система аватар» (костюм телеприсутствия) созданного Александром Поповым (Вятка PR).
2012г мой сайт из-за статьи про костюм телеприсутствия (эту статью в самом начале этого сайта веду с 2004г) исчез с интернета, неделю не мог вернуть его в интернет. Постоянно кто-то меняет части технического текста моего сайта на запутанный бред: 6 раз менял хостинг сайта. 2012-2014г форумы с темой «КОСТЮМ ТЕЛЕПРИСУТСТВИЯ» государство удалило с всех популярных сайтов России!!!
У изобретателя костюма телеприсутствия Александра Стрельцова streltsovaleks.narod.ru/HeadAndPelvis.html 2 года подряд морское ведомство России мошенически удаляло голоса за его проект (он 2 раза побеждал в начале) в госконкурсе водолазной техники, чтоб деньги госзаказов получали только госпредприятия и госслужащие определенного ранга.
Авторы костюмов телеприсутствия изобретатели Александр Попов, Александр Стрельцов каждый отдельно безрезультатно обращались с письмами к президенту России, к госорганизациям, получив в ответ блокирование в интернете и запрет на профессию конструктора (как и мне), чтоб государство и гражданское общество не были обязаны отечественным изобретателям за создание не имеющих аналогов новых технологий с мировой новизной.
По секретным инструкциям
(на 6 лет сажали в тюрьму изобретателей за разглашение секретной инструкции. По сфабрикованному агентурой уголовному процессу)
местных силовиков государство и гражданское общество за новые технологии должны быть обязаны только зарубежным странам или государству, но не отечественным изобретателям. Государство по секретной инструкции карает СМИ, если они не заменят везде запрещенное слово ИЗОБРЕТАТЕЛЬ на слово ИННОВАТОР.
Изобретателям России запрещено иметь какое либо влияние на гражданское общество чтоб не стали миллиардерами как Илон Маск. Госидеология Евангелие по её принципам социального равенства борется с богатством по примеру борца против капитала бомжа-коммуниста Иисуса Христа, который бил плетью капиталистов (предпринимателей), портил их товар, из-за чего произошли коммунистические революции в Франции, Венгрии, Германии, России с гибелью десятком миллионов граждан.
Из-за коммунистического вируса в 20 веке население части стран мира заметно сократилось, что очевидно и было конечной целью древнеримских разработчиков коммунистического вируса Евангелие.
От госидеологии в России осталось скрыто враждебное отношение государства к частным военно промышленным предпринимателям и изобретателям. В госконкурсах на разработку и производство военной техники побеждают не изобретатели с их стартапами и частные военно-промышленные предприниматели, а госпредприятия с их бюрократической способностью поглощать без адекватного результата огромные (в процентах от ВНП) деньги налогоплательщиков.
Госидеология – единственная причина почему в России с её идеологическим догматизмом (государство секретными инструкциями от госидеологии, выполняет каждое слово её текста) проблема с наукоемкими технологиями.
Достаточно уничтожить госидеологию, тысячи её секретных инструкций, чтоб в России легко появлялись новые наукоемкие технологии мирового уровня и захватывали мировой рынок. За последние 150 лет обычно северные страны всегда имеют более высокий уровень жизни, всегда экономически сильнее и технологически более развиты, чем южные страны.
Реальный запрет госидеологии отнимет рабочие места у миллионов идеологических силовиков и их агентов. В ответ террор, саботаж чтоб сохранить число рабочих мест для родственников. Похоже госидеология будет разрушать страну сотни лет.
Власти отдали Массачусетскому технологическому институту $302млн за обещанные лекции его профессоров в Сколково (коррупционный аналог Роснано для раздела денег между влиятельными парнями секретных спецслужб)! От властей России американские училки получают сотни $млн наших денег налогоплательщиков, российские изобретатели получают только отпечатки дорогих ботинков чиновников на заднице и удаление секретными инструкциями форумов про костюм телеприсутствия с популярных сайтов.
1903г первую в России изобретательскую статью про ракеты для колонизации космоса напечатал в журнале «Научное обозрение» изобретатель Константин Циолковский. Силовики мгновенно навечно закрыли журнал «Научное обозрение», конфисковали уничтожили весь тираж номера журнала с изобретательской статьёй Циолковского про ракеты для колонизации космоса. Статью Циолковского приравняли к антиправительственной литературе (рабы рабовладельческой царской России убегут на самодельных звездолётах в галактику).
2012г эта история повторилась: с 2012г начали удалять с интернета изобретательские статьи трех российских изобретателей костюма телеприсутствия и виртуальной реальности. Изобретательские статьи российских изобретателей костюма телеприсутствия и виртуальной реальности блокируют. Самые интересные российские передачи про робототехнику идут только в ютуб, который по индивидуальной цензуре могут смотреть только богатые люди и дети правящих кланов. Идеологическая (госидеология Евангелие) борьба государства с изобретателями: 2 попытки ослепить меня, 3 попытки убить меня по заранее заготовленной легенде спецслужб, десятки тысяч карательных операций с 1970г чтоб по христианско-идеологическим мотивам заставить меня Создателя и Творца прекратить заниматься изобретательством. Надо запретить все госидеологии как этого требует Конституция России, убрать с Конституции серийного убийцу, инопланетянина-рабовладельца Бога; убрать пошлины с отечественных изобретателей на их личные изобретения, убрать законы и секретные инструкции против научных атеистов.
Фирма «Андроидная техника» с Магнитогорска сделала экзоскелеты рук с силовой обратной связью на плечо (3 степени свободы с силовой обратной связью), предплечье (2 степени свободы с силовой обратной связью), локоть (2 степени свободы с силовой обратной связью), пальцы (7 степеней свободы, из них 4 степени свободы с силовой обратной связью) (фото ниже справа) для костюма телеприсутствия, с которого космонавты с бункера лунной базы лунными андроидами типа «Марфа» (фото ниже слева) сварят электронно-лучевыми (с алгоритмом регулировки угла фокусировки луча) сварочными полуавтоматами с листов титана герметичные залы Международной лунной базы в котловане глубиной 6-10м. Листы на плюсе, андроид на минусе высоковольтного источника питания – защита андроида от брызг расплавленного титана.
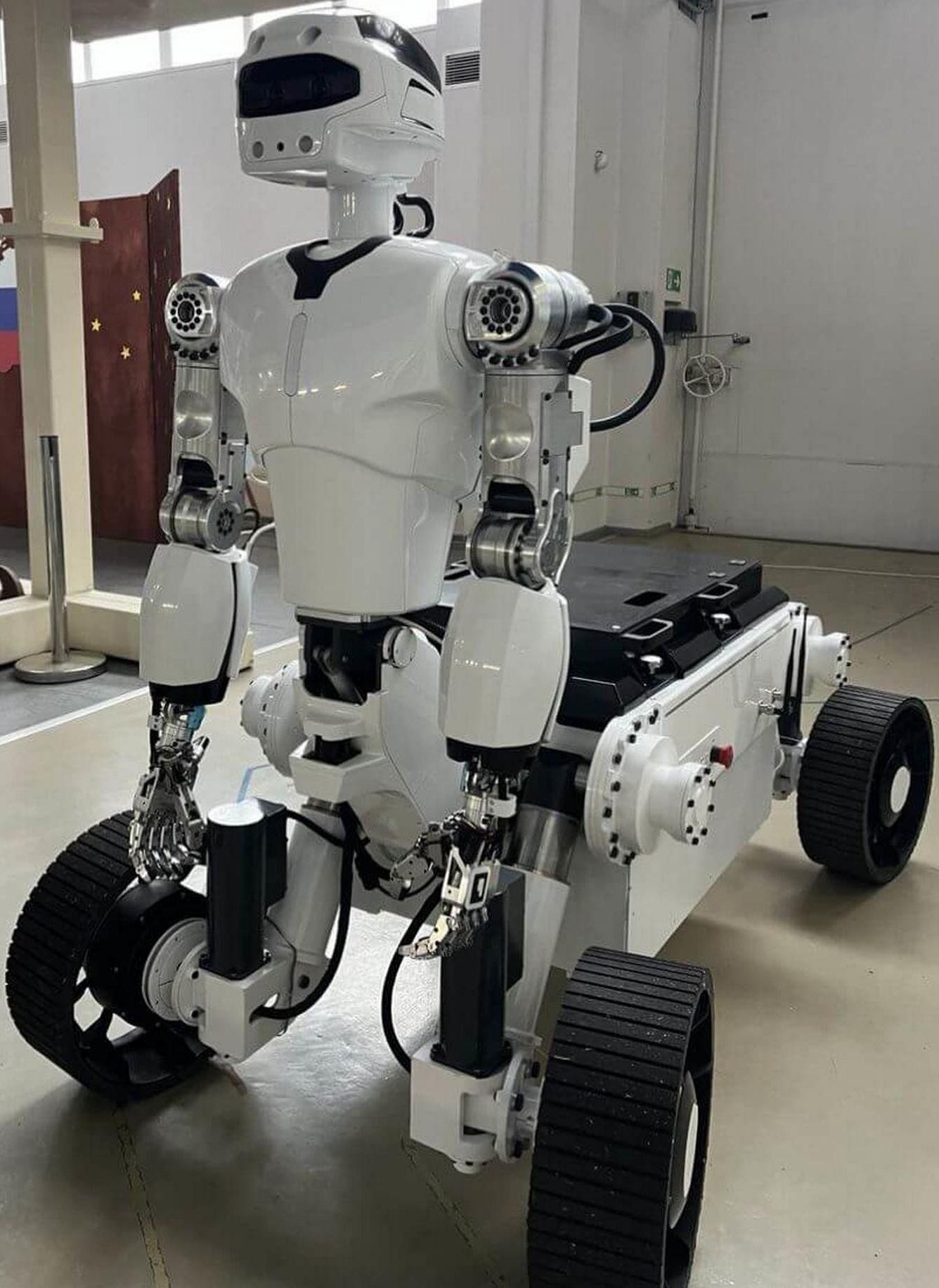
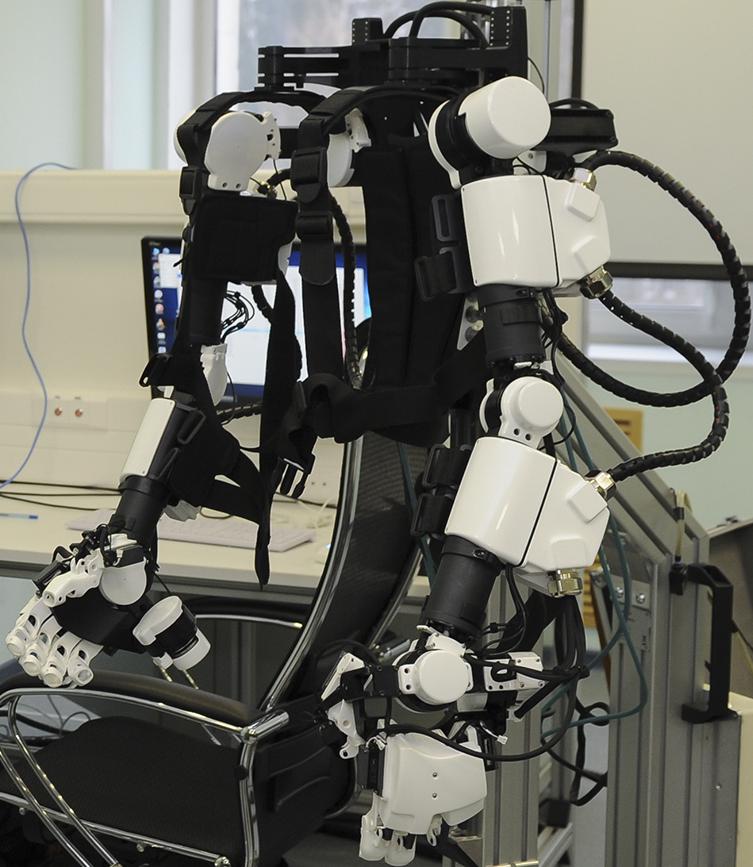 На фото справа видно: использовать экзоскелет руки тяжело – нет компенсации веса и инерции экзоскелета, нет быстродействия из-за большой массы приводов в экзоскелете руки. Выгоднее групповой привод на тросах, шкивах вдоль всей руки – быстродействие рук в 5 раз выше при равной мощности.
На фото справа видно: использовать экзоскелет руки тяжело – нет компенсации веса и инерции экзоскелета, нет быстродействия из-за большой массы приводов в экзоскелете руки. Выгоднее групповой привод на тросах, шкивах вдоль всей руки – быстродействие рук в 5 раз выше при равной мощности.
Полезная мощность экзоскелета руки – сумма разгонного и тормозного (без знаков векторов) секундного импульса гантелей в экзоскелете кисти. В движении гантелей вверх получаемое ими ускорение складывают с ускорением свободного падения. В движении вниз вычитают.
Лунной базе нужны андроиды втрое крупнее андроида Марфа, способные поднимать держать сваривать большие титановые листы при строительстве лунной базы с двойными стенками для фиксации утечки воздуха с примесью гелия. Нужен лунный андроид из высокомодульных твердых материалов с малым температурным расширением, с мощными непружинящими руками с компенсацией всех зазоров механизмов. Снаружи лунного андроида твердое износостойкое зеркальное покрытие из сплава золота с иридием отражает широкий спектр солнечных лучей, защищая электронику от перегрева.
13 лет с 2012г тему «КОСТЮМ ТЕЛЕПРИСУТСТВИЯ» в интернете блокирует госидеология Евангелие: бойцы невидимого фронта в невидимой войне против ИЗОБРЕТАТЕЛЕЙ (Создатели мировой новизны, претендующие на контроль над мировой промышленностью) заменяют ИННОВАТОРАМИ (мелкие улучшатели уровня рыночного чмошника), секретные инструкции принуждают СМИ слово «ИЗОБРЕТАТЕЛЬ» менять на «ИННОВАТОР».
Я народный (самоучка) конструктор Томас Эдисон свидетельствую – государство ведет невидимую войну против нас народных конструкторов, изобретателей, домашних технических моделистов из нехристианских наций. Уничтожили 107 моих моделей техники, мои инструменты, станки, сварочное оборудование, ~350кг моих запасов материалов для моделизма, вырывали ключевые страницы книг моей личной инженерной библиотеки (исчезло много книг) из 1000 книг, 13 лет лучший книжный магазин отказывался продавать мне техническую литературу (на любую другую литературу ограничений не было), почти ежедневным вредительством с 1970г с 8-летнего возраста уже 55 лет (мне 64 лет) моей жизни непрерывно добиваются от меня отказа от профессии конструктор
(запрещена нехристианским нациям госидеологией Евангелием – я свидетель с 1970г. Госрегулирование жизни граждан: мне государство назначило на выбор профессии строительный рабочий, ювелир)
чтоб я прекратил десятилетиями заниматься изобретательством в своей комнате, вышел на улицу общаться с людьми – стал коллективистом. Агентура коллективистов учит: все равны, нельзя быть умнее, богаче, лучше других.
Надо ввести в всех странах уголовную ответственность (от 5 до 10 лет тюрьмы) за пропаганду учебника коммунистов Евангелия, учебника идеологических террористов Евангелия, учебника рабовладельцев Евангелия, книг идеолога антипредпринимательского гостеррора Карла Маркса. Тогда никто не сможет помешать нам индивидуалистам, единоличникам используя личные таланты становиться миллиардерами, захватывать контроль над военной промышленностью своих стран, быть самыми уважаемыми гражданами, держать под личным контролем самые наукоемкие секторы мировой промышленности.
В феврале 2024г отказал мне в рабочем месте конструктора 23-й работодатель России. Буду работать конструктором-изобретателем в Индии. Создам в Индии частную изобретательскую фирму. Десятки лет государство уничтожало мои 4 военно-промышленные изобретательские фирмы, мои модели российских танков и истребителей; с 1978г добивается чтоб я прекратил называть себя чемпионом мира по конструированию, пожизненно запретило мне с 8-летнего возраста профессию инженера-конструктора, госрегулированием жизни (это преступление против гражданского общества) граждан выбрало мне работу строительного рабочего.
универсальный конструктор-изобретатель Томас Эдисон, чемпион мира по конструированию, изобретательству и искусственному интеллекту
Обращаюсь к инвесторам и предпринимателям Индии – помогите на территории Индии реализовать:
1. мой проект костюма телеприсутствия и виртуальной реальности
2. мои проекты андроидов ростом от 5мм до 5м
3. мои проекты бесшумных быстродействующих приводов с рекордными параметрами быстродействия и силы на единицу веса привода
4. мой проект многоразовой ракеты-носителя с самым дешевым в мире выводом 1кг груза на орбиту
5. мой проект сверхскоростного микропроцессора на новом (без триггеров) принципе работы, в котором софт может сам создавать миллиарды одновременно параллельно (для искусственного интеллекта) работающих каналов вычислений, что эквивалентно миллиардам ядер процессора современного типа. Мой микропроцессор будет работать в тысячи раз быстрее микропроцессоров США
6. мой проект искусственного интеллекта на обычных алгоритмах для робота-андроида и интернет-поисковика
7. мой проект сверхкомпактного микротурбогенератора с рекордным КПД для роботов, беспилотников, самолетов, вертолетов, автомобилей
8. мои проекты сверхчувствительных датчиков, которые я точно знаю сегодня сильно нужны индийской промышленности
9. мои изобретения по системам точной навигации на местности
10. другие мои проекты уточню в Индии с влиятельными гражданами Индии. Мне нужен контакт с влиятельными гражданами Индии нехристианского происхождения из нехристианских наций.
2026г я еду в Индию с целью получить вид на жительство в Индии, создать с помощью индийских инвесторов изобретательскую фирму в Бангалоре для продажи в мировом рынке костюма телеприсутствия и виртуальной реальности с игровым софтом и другой наукоемкой продукции от организованного мной консорциума предприятий индийской промышленности, не имеющих совладельцев из христианских наций, из иностранцев.
С бангалорскими разработчиками софта создам первый в мире аватар-сайт индийской Метавселенной, пользователи которого почувствуют полный физический контакт с окружающей виртуальной средой через тактильную, силовую обратную связь.
Первым в мире аватар-сайтом будет аватар-сайт Индийской организации космических исследований ISRO: экскурсия в виртуальную Индийскую марсианскую базу, включая управление андроидом в любой точке Марса по марсианской спутниковой сотовой связи. Альпинисты будут подниматься на виртуальные марсианские горы.
Моя изобретательская фирма от лица индийских инвесторов заключит контракт с ISRO на создание костюма телеприсутствия Индийской лунной базы. Лунную промышленность с инфраструктурой, линиями метро построят андроиды управляемые с лунной базы.
Моя изобретательская фирма продвинет на мировой рынок другие мои разработки, накопившиеся за полвека моей неоплачиваемой работы изобретателем. Они изменят ход мировой истории сильнее, чем изменил ход истории проект «Манхеттен». Я перенесу центр мировой промышленной мощи в Индию в самых наукоемких секторах мирового рынка.
Благодаря разработанным моей индийской фирмой абсолютным оружием наземного боя – андроидам-солдатам управляемых из дома индийскими геймерами – индийские Вооруженные силы захватят Пакистан и Китай, далее победоносное наступление Армии андроидов-солдат до последнего моря по заветам Чингисхана. Министр обороны Индии наградит меня Почетной грамотой чемпиона мира по конструированию.
Обращаюсь к гражданам Индии с просьбой аренды жилья на время проведения переговоров с индийскими инвесторами. Мой телефон +79055453610. Готов оплатить работу посредников моей предпринимательской деятельности в Индии, заключить с ними договор чтоб вырваться из коллективистской страны для создания в Индии изобретательской фирмы. С 2004г десятки лет никто не звонил мне по телефону, не связывался с мной по интернету по поводу моего сайта.
Половина индийских робототехнических сайтов заблокирована в России. Я годами безуспешно пытаюсь по интернету с помощью интернет-переводчиков связаться с индийскими робототехниками, с инвесторами и инвестиционными фондами Индии для реализации в Индии моего проекта домашнего костюма телеприсутствия и виртуальной реальности. Индия по интернету недоступна. Помогите кто-нибудь! Я выполню условия договора.
ПЛАН МОНОПОЛИЗАЦИИ ИНДИЕЙ 60% МИРОВОГО ПРОМЫШЛЕННОГО РЫНКА
1. для создания рынка костюмов телеприсутствия выйду на продажу костюма телеприсутствия для публичного использования в городских парках с аттракционами, в аттракционах торговых центров для выявления и ликвидации детских болезней костюма телеприсутствия. Появится интернет-магазин продающий костюмы телеприсутствия. В крупнейших городах Индии будут магазины продающие домашний костюм телеприсутствия, игры к нему.
2. в открытый доступ в сайте моей фирмы, в сайтах международных игровых организаций выложу всю необходимую информацию для разработчиков игр, включая интересующие их подробности работы костюма телеприсутствия и виртуальной реальности.
3. в крупнейших соцсетях будут сообщества по теме «Костюм телеприсутствия и виртуальной реальности», сообщества по теме «Разработка игр для костюма телеприсутствия и виртуальной реальности».
4. индийские фирмы отвечающие по контракту за высокое качество изготовления и борьбу с левой продажей, получат большие заказы на изготовление модулей костюма телеприсутствия, их комплектующих в рамках Системы мобилизации промышленности на монополию (удовлетворение спроса на новый товар на мировом рынке раньше иностранных конкурентов) в мировом промышленном рынке. Это обеспечит захват за 4 года 90% мирового рынка костюмов телеприсутствия. Дальше мировой рынок удерживать легче, если в рамках Системы мобилизации промышленности договориться с индийскими фирмами не ставить высокие цены на массовые модели домашних костюмов телеприсутствия для сохранения монополии в мировом рынке. Чем дешевле массовые модели костюма телеприсутствия, тем меньше вероятность выхода на мировой рынок неиндийских разработчиков и изготовителей костюма телеприсутствия, что даст 60-процентную мировую монополию. ~30% прибыли мирового промышленного рынка даст продажа костюмов телеприсутствия и сопутствующей техники. У меня есть ещё несколько детально проработанных крупных проектов для индийской промышленности.
Костюм телеприсутствия разрабатываю с 2002г. Робототехникой занимаюсь с 1988г. В промышленности работаю с 1977г (на стажировке от Межшкольного учебно-производственного комбината месяц работал токарем в заводе Сепараторов в Махачкале 1977г) уже на 7-ом заводе. Я универсальный изобретатель Томас Эдисон (по паспорту) занимаюсь изобретательством и конструированием с 1970г. Моделизмом занимался 36 лет с 1970г. Форумы:
roboforum.ru/forum61
dzen.ru/a/ZLa18JSRBBu9q9br
2) КОСМИЧЕСКИЕ ПУТЕШЕСТВИЯ: в продаже записи управления с костюма телеприсутствия андроидами на Титане, на Плутоне, на спутниках планет. Люди управляя андроидами-альпинистами забираются на горы других планет, путешествуют по ним с вращающихся (для создания силы тяжести в костюме телеприсутствия) орбитальных баз. В домашнем костюме телеприсутствия пользователи заново пройдут эти путешествия.
Владелец костюма телеприсутствия по Закону использует зарегистрированную
КРИПТОЗАЩИТУ ОБРАТНОЙ СВЯЗИ «КОСТЮМ ТЕЛЕПРИСУТСТВИЯ – АНДРОИД»: у команд обратной связи псевдослучайный номер, метки начала, окончания кода команды. В следующей команде другие номер, шифр + метки начала конца команды. Допуски времени на части сигнала и переходы между ними. Псевдослучайная длина пакетов цифровой связи. Псевдослучайный перескок частоты по динамическому шифру. Узконаправленные ретрансляторы.
В регистратор время, направление приема предыдущего сообщения андроидом. Диалоговый динамический шифр привязан к дате, времени суток. Отключение секторов диаграммы направленности антенн робота, откуда шли ложные команды.
ВАКУУМНЫЙ ГОРЯЧИЙ ЦЕХ
Выплавка металла, горячие техпроцессы сверхэкономичны в термоизолированном вакуумном (или аргоновом) горячем цехе с постоянной температурой обрабатываемого материала 1600-2000°С. Материал-2 для обработки температурой в тележке на рельсах въезжает в теплообменный шлюз-1, закрывается герметичная дверь.
Материал-2 в воздушной среде обменивается температурой с готовыми изделиями с предыдущего материала-1. Готовые изделия приехали в теплообменный шлюз-1 с теплообменного шлюза-2.
В зеркальном теплообменном шлюзе-2 материал-2 обменивается температурой с готовыми изделиями с теплообменного шлюза-3. Готовые изделия движутся к выходу с горячего цеха.
Материал-2 въезжает в зеркальный теплообменный шлюз-3, обменивается температурой с изделиями горячего цеха. В зеркальном теплообменном шлюзе-4 материал-2 обменивается температурами с изделиями горячего цеха. После обмена температурами готовые изделия едут в теплообменный шлюз-3. Теплообменный шлюз-4 закрывается, создается вакуум.
Открывается гермодверь, материал-2 в тележке едет в вакуумный горячий цех, инфракрасными лучами обменивается температурой с готовыми изделиями.
Готовые изделия в тележке идут в теплообменный шлюз-4. Далее в обратном порядке. В вакуумном горячем цехе андроиды горячими техпроцессами получают готовые изделия с материала-2.
Андроидами управляют рабочие с домашних костюмов телеприсутствия. Андроиды, средства производства, пол, стены, потолок имеют отражающие инфракрасные лучи износостойкое зеркальное покрытие из сплава золота с иридием для возврата тепловой энергии техпроцессу.
Горячие вакуумные цеха очень мало тратят энергии на разогрев материалов для горячих техпроцессов. Сегодня 90% себестоимости выплавки стали, сплавов – стоимость разогрева материала.
В вакуумном горячем цехе резку, сварку любых материалов выполняет электронный луч. Самый высококачественный, самый прочный, самый лёгкий по весу, самый точный, самый глубокий, самый быстрый, самый элегантный – сварочный шов электронным лучом в вакууме: на Луне вакуум бесплатно.
Электронный луч сверлит 2000 отверстий в секунду, вырезает с любых материалов детали с точностью 0,03мм. Он лучший инструмент 3D-принтеров применяющих в работе тугоплавкие порошки или ускоритель ионов
Горячий цех на Луне электронным лучом испарит привезенную железной дорогой добываемую в рудниках породу, электромагнитным способом разделит превращенную в плазму породу на химические элементы: обогащение урана, редкоземельных металлов.
С очищенных элементов андроиды управляемые с костюмов телеприсутствия подлунного города, создадут в вакууме сплавы, произведут с них многотысячетонных космических роботов с мощными двигателями.
Космические роботы будут бомбардировать Марс против его движения (приближение орбиты Марса к Земле) ледяными астероидами, создавая на Марсе океан. Космические роботы будут бомбардировать астероиды с редкоземельными и благородными металлами, урановые и ториевые астероиды по заданным точкам приземления на Марсе. Уран-ториевые атомные электростанции произведут с оксидов металлов кислород атмосферы Марса.
На Луне космонавт в скафандре смертельную дозу радиации космических лучей получит за 300ч работы на поверхности Луны, за минуты от прилетевших (800-1200км/с) ионов водорода солнечной бури (рост радиации до 1 млн раз): часть из них пробивает стальную броню 1см. Руками андроида с костюма телеприсутствия люди работают с защищенных от радиации (10-200м под грунтом + лунное метро) лунных городов.
Управление андроидом лунной сотовой связью с станциями электрозарядки в годовой эксплуатации 1000 раз дешевле (радиационная сменность персонала) скафандра. Суточная производительность работы в костюме телеприсутствия 100 раз больше чем в скафандре за счет кисти аватара с высоким тактильным разрешением, с чуть выступающими стальными ногтями для мелких работ.
КПД преобразования химической энергии в механическую: человек 25%, андроид 70%. Андроид 2 раза легче человека в скафандре, тратит 5 раз меньше энергии. В костюме телеприсутствия человек тратит пищи втрое меньше чем в скафандре.
Зеркала геостационарной орбиты Луны осветят солнечные батареи Международной лунной базы, отражают волны глобального сотового, лазерного телеуправления лунных роботов. Луна вакуумный полигон доводки космических андроидов, экзоскелетов, электронолучевых технологий, ионно-лучевых 3D-принтеров, вакуумных роботизированных технологий: чипы, матрицы тепловизоров, фармацевтика, производство ракетного топлива, сверхбольших ракет
ПОДВОДНЫЙ СВАРОЧНЫЙ АНДРОИД: аккумулятор, газотурбинный двигатель на гидрореагирующем топливе или кабель. Опции: в тыльной стороне ладони телекамера с управлением голосом, жестами. Голосовая функция «статуя»: фиксация всех приводов кроме приводов правой руки для контроля за положением электрода при сварке. Голосовая установка силы тока, начального напряжения с индикацией в экране. Быстродействующая оптика с зумом + 4 разнесенные фары рассеянного света: 2 фары сверху по бокам головы, 2 фары снизу по бокам головы. На ногах 3 пальца для неподвижного закрепления андроида.
СВАРОЧНЫЙ АНДРОИД: сварка титановых, алюминиевых, магниевых сплавов в вакуумных (аргоновых) цехах. Сварочный аппарат встроен в двигатель андроида. Для малых размеров гермолюков андроид лежа на тележке катит по рельсам в шлюз.
Электродная масса: опора на объект сварки левой кистью с мелкой острой насечкой. В правой кисти механизм подачи сварочной проволоки или электронная пушка для сварки, резки электронным лучом.
Опции: в тыльной стороне ладони экзоскелета телекамера с управлением голосом, жестами. Для облегчения захвата (в аргоновом цехе) некоторых предметов кисть экзоскелета с контактно-вакуумными (давление предмета открывает вакуумный клапан) присосками. Стереокамеры с фильтром затемнения. Голосовая функция «статуя»: фиксация всех приводов кроме правой руки. Голосовая установка силы тока, начального напряжения с индикацией в экране.
АНДРОИД ВЫСОКОТЕМПЕРАТУРНЫЙ размером от 10см и больше для работы в расплавленных металлах (управление ультразвуком) в технологическом оборудовании или в расплавленной лаве в жерлах вулканов
АНДРОИД-СПАСАТЕЛЬ из жаропрочных материалов разбирает завалы, оттаскивая бетонные плиты, элементы конструкций рухнувших зданий. Малое лобовое сечение без острых углов: протискивается в узкие проходы. Запас кислорода для человека: надувная теплоизолированная спасательная капсула (её на спине вынесет андроид) изолирует человека от угарного газа, температуры.
Снизу локтя андроида ножницы для арматуры. Пожар: турбина андроида работает на жидком азоте. Завалило андроид обломками: его сирена ответит на сигнал радиопередатчика.
Подводный андроид-спасатель в каждой кисти имеет палец с ультразвуковым излучателем для переговоров с подводниками через корпус утонувшей подлодки. Андроид-спасатель приложит конец пальца к корпусу подлодки. Чистая речь зазвучит с внутренней стенки подлодки от биений 2-х ультразвуковых частот излучателя. Подводники ответят карманным излучателем с микрофоном
АНДРОИД-ШАХТЕР: малое лобовое сечение без острых углов, волочащаяся по земле кабель-антенна. У андроид-шахтеров пневмопривод с питанием от шланга: он крутит турбину маховика с электромагнитными муфтами.
Андроид-шахтеры имеют электропривод с кабелем: в пути следования проложат сеть пневмошлангов или ферритовых ленточных коаксиальных кабелей питания андроида СВЧ-током, оптокабель (1кв.мм оптоволокна передает мощность 100кВт) дающий энергию мощным фотоэлементам или паровому котлу паротурбогенератора
АНДРОИД-ГРУЗЧИК: у андроида-грузчика максимальные диаметры шкивов в шарнирах. Нет команд – андроид держит груз не меняя его положение
АНДРОИД ПРОМЫШЛЕННЫЙ: низкие потолки в промышленности уменьшат затраты на отопление, кондиционирование, заменят грузовые лифты спиральными дорогами многоэтажных промышленных цехов. Андроид заменит портальные, козловые подъемные краны. Андроиды быстро на морозе или вакууме соберут крупногабаритную технику
АНДРОИД-ХИРУРГ с 4 руками в мобильной клинике в военных условиях – удаленно работают человек-хирург + ассистент. Костюм телеприсутствия позволит врачу войти в домашнего андроида больного. Костюм телеприсутствия домашний это реабилитационный аппарат, аппарат для фитнеса
АВАТАР-АНДРОИДЫ ГЛОБАЛЬНОГО УПРАВЛЕНИЯ КЛИМАТОМ снизят зависимость от нефти, газа. Изготовленные на Луне (включая ракеты-носители), небольшими частями доставленные с неё на геостационарную орбиту Земли Геостационарные орбитальные зеркала площадью сотни тысяч квадратных километров осветят ночью города оплатившие услугу: солнечные батареи крыш домов заменят электростанции
Орбитальные зеркала:
1. климатические
2. освещающие
3. информационные
Геостационарное орбитальное зеркало ГОЗ: множество соединенных в 1 плоскости 60-метровых квадратных ячеек. Каждая ячейка пропускает солнечные лучи последовательно через взаимно перпендикулярные шторы-X-Y. Жалюзи шторы-X наводят луч на город по координате-X, шторы-Y наводят луч по координате-Y
Климатические ГОЗ охладят прикрепленные к ним участки поверхности Земли, отражая солнечные лучи обратно в Космос. Другие Климатические ГОЗ нагреют прикрепленные к ним участки поверхности Земли просто повернув зеркальные шторы в каждой ячейке или сконцентрировав шторами много дополнительных лучей Солнца в нужный участок Земли.
Управление климатом через закрытие орбитальными зеркалами от Солнца центра циклона, через нагрев центра антициклона орбитальными зеркалами. Подавление смерчей, тайфунов управляя температурой, воздушными потоками.
Орбитальные зеркала управляя жалюзи шторами-X-Y, водя сфокусированную горячую точку вокруг нулевой антициклонной точки или объекта на земле закрутят в заказанном направлении вращения антициклон, двинут к городу или точно рассчитанными встречными потоками воздуха с нескольких сторон подавят смерч, ураган.
Климатические ГОЗ можно использовать в качестве оружия для поджога нефтехранилищ, складов боеприпасов противника, для противовоздушной обороны, создавая вокруг охраняемого объекта мощный антициклон, сбивающий на землю эскадры бомбардировщиков, беспилотников, крылатых ракет
Информационные ГОЗ отражая лазерные лучи, радиоволны, без аппаратной задержки дают телеканалы, интернет вместо спутников. На Земле, в ячейках информационного орбитального зеркала миллионы лазерных прицелов приводами непрерывно взаимно друг на друга прицеливают (по длине волны, номеру излучающего лазера) миллионы пар лазеров двухсторонних линий связи для индивидуальных защищенных абонентов интернета.
Облачность лазеры пробьют радиолучем синтезированным биениями двух инфракрасных частот лазеров. Биения 2-х инфракрасных лазеров синтезируют в приемных антеннах радиоволну узконаправленной обратной связи, проходящей через плотные облака.
Ячейки геостационарного орбитального зеркала андроиды управляемые с Земли людьми, соединят в ГОЗ. Ячейку орбитального зеркала андроид-сварщики, андроид-укладчики углеволокна, андроид-сборщики изготовят соединят в ГОЗ на высоте ~3500км
Задержка управления аппаратная у цифровых протоколов телеметрии, интернета велика: разработчики оптимизировали их не на минимальную задержку управления, а на суммарную скорость каналов.
Многочастотная аналоговая силовая обратная связь «костюм телеприсутствия – андроид» используя сотни одночастотных лазерных лучей верхней части окна прозрачности атмосферы Земли, имеет аппаратную задержку управления 20 раз меньше цифровой связи.
Будущее за цифровой криптостойкой силовой обратной связью «костюм телеприсутствия – андроид», использующей сотни одночастотных инфракрасных лазерных лучей. Часть команд связь синтезирует биениями частот других команд с подобранными алгоритмом функциями.
Готовую ячейку орбитального зеркала лунные буксиры (изготовлены, заправлены танкерами на Луне) поднимут в геостационарную орбиту
ПЕРЕДАЧА УПРАВЛЕНИЯ с костюма-1 телеприсутствия (человек-оператор-1 часового пояса-1) к костюму-2 телеприсутствия (оператор-2 часового пояса-2): оператор-2 примет работу в режиме односторонней (от андроида) обратной связи.
В костюме-1 телеприсутствия усиление в направлении «человек – андроид» уменьшается до нуля (сигнализация + процент усиления в экране шлема).
В костюме-2 телеприсутствия усиление растет до 100% (сигнализация + процент усиления в экране шлема).
В аватар-сайте участие в образовательном или игровом 3D-мультфильме. Дистанционная работа в АЭС и опасных производствах, операции хирурга в зоне катастрофы, военных действий.
КПД ТЭС 40%, КПД АЭС 30-31% от проблем сварки теплообменника реактора: ставят простейший теплообменник, меньше температура пара. Если радиоактивные теплообменники будут заваривать андроиды всех размеров (доступ к трубе) – КПД АЭС будет 40%
АНДРОИД-ВОДОЛАЗ: (статье 4 раза вредили) найдя в глубине 5,6км месторождение редкоземельных металлов 1000 раз больше мировых запасов, Япония приняла госпрограмму освоения ресурсов морского дна: редкоземельные металлы, гидрат метана, нефть, газ.
21 век: рабочие, инженеры домашними костюмами телеприсутствия с сайта глубоководного предприятия управляют тысячами андроидов (1-2Мбит/сек каждый) оптоволоконным электрокабелем с берега. Или оптоволоконным электрокабелем с корабля, подключенного к спутниковой связи.
В подводной сотовой сети сигнал передают оптические, ультразвуковые каналы. Навигация: ультразвуковые и световые маяки разной частоты.
У андроидов трафик лазерными лучами сквозь воду на 100-200м (2км – ретрансляторная связь цепочки андроидов) + ультразвуковая линия 65Кбит/сек на 6км. Уголковые отражатели андроида, модулируя (отдельная длина волны для модуляции) пришедший луч лазера дают обратную связь.
Освещение предприятия мощными короткими импульсами с известными по таблицам решений моментами начала импульса. Телекамеры андроидов синхронизированы с импульсами света. Ультразвуковое подводное зрение андроидов.
Бесконтактная зарядка аккумуляторов андроидов, розетки 6V. Андроид работает 24ч в сутки. Для мощных андроидов турбогенератор с гидрореагирующим (окислитель вода) топливом.
На глубине 11км промышленная добыча перегонкой через мембраны ионизированных током тяжелой воды, тяжелых изотопов растворимых в воде элементов, их соединений
МЕТОД НЕОГРАНИЧЕННОЙ ГЛУБИНЫ ПОГРУЖЕНИЯ АНДРОИД-ВОДОЛАЗА: давление забортной воды деформацией стенки гибкого армированного мешка, закрытого с 1 конца уравнено с отсеками андроида, заполненными диэлектрической жидкостью (силиконовое масло). Деформация мешка уравнивает давление изнутри и снаружи андроида: нет ограничений глубины погружения андроида
ИДЕАЛЬНАЯ ЦВЕТНАЯ КАРТИНКА ВИДЕОКАМЕР ПОД ВОДОЙ: лазерно-импульсная система телекамер 3-5 раз увеличит дальность зрения: лазер андроида освещает объект мощным сверхкоротким импульсом-2 света длиной 5см (время импульса по скорости света в воде). Перед полетом отраженного от объекта съемки импульса-2 лазер просветлит ему путь, освещая воду светом длин волн срывающих электроны с поглощающих свет электронных орбит молекул воды.
Больше сорвано электронов с поглощающих свет электронных орбит – прозрачнее вода. Просветляющий воду лазерный импульс-1 длиной ~10см опережает импульс-2 на ~10см. Стереокамеры включаются на 5см прихода отражённого от объекта съемки импульса-2 света.
Высококачественная цветная стереокартинка: стереокамеры с 3 объективами на 3 цвета системы цветного телевидения в каждой телекамере. Длины волн красного, зеленого и синего пикселей телекамеры подогнаны к спектру полосы максимального пропускания морской воды, к материалу объектива, что дает идеальную цветную картинку. По цветовой таблице воды данного региона, видеосигналы красного, синего цвета усиливают.
Глубина погружения телекамер андроида неограничена: в телекамере зеркальная оптика или жидкая линза с оптической жидкостью (глицерин...) в прозрачной пластиковой капсуле. Прозрачная капсула имеет систему выравнивания давления оптической жидкости с давлением забортной воды через трубку в капсуле, соединяющей её с армированным мешком. Радиальный, кольцевой (тянет трос в пазах периметра капсулы) приводы меняя кривизну пластиковой капсулы, меняют фокусное расстояние
ГЛУБОКОВОДНОЕ РОБОТИЗИРОВАННОЕ ПРЕДПРИЯТИЕ: морские течения, электрохимические процессы в соленой воде, подводные вулканы создали на дне океанов высокие концентрации сырьевых ресурсов промышленности, сельского хозяйства.
Гидроботы не требуют защиты от давления: отсеки залиты диэлектриком: силиконовое масло или солярка. Масло принимает давление забортной воды стенками гибкого армированного мешка. Деформация мешка уравнивает давление снаружи, изнутри гидробота.
Подводный энергоисточник: толщина земной коры до жидкой магмы 10км под океаном, из-за давления, теплоотвода воды в больших глубинах. Бурим скважину 10км. Давление воды в скважине насоса уравняет давление земной магмы. Поддерживая давление вставить в скважину трубу меньшего чем скважина диаметра до уровня магмы. Закачивать в трубу холодную (минус 1-2°C) воду дна океана. Откаченная с внешней стороны трубы вода скважины, нагретая магмой до 500°C – в тепловой парафиновый двигатель с электрогенератором.
Глубоководные донные нефтяные вышки с нефтехранилищами, подводными танкерами. Подводные танкеры тонкостенные – не нужна защита от давления воды. К подводным нефтяным вышкам они спускаются полные морской водой. При заполнении танкера нефтью он стоит вертикально. Нефть (легче воды) сверху вытесняет воду вниз.
ВАРИАНТ-2: нефть качают в свернутый в рулон армированный пластиковый мешок. Подводный танкер из сложенного армированного пластикового мешка принимает обтекаемую веретенообразную форму от заполнения нефтью. Робот-буксир буксирует танкер к потребителю.
Часть нефти превращается в конечный продукт в подводном предприятии. Технологии превращения нефти в бензин, пластмассы… требуют давление, температуру – есть у действующих подводных вулканов
ВОДОМЕТНЫЕ ДВИЖИТЕЛИ АНДРОИД-ВОДОЛАЗА с управляемым вектором (угол до 200°) тяги по бокам талии андроида. Тягу можно направить косо-вперед, косо-назад, косо-вниз (вниз-косо вбок на угол до 15°) от туловища андроида.
Команда «взлёт»: резкое движение вниз носков обеих ступней человека в костюме телеприсутствия.
Команда «лететь вперед»: удерживаем в нижнем положении носки ступней. Горизонтальная скорость полета андроида в воде зависит от силы нажатия человеком носков ступней вниз.
Команда «угол атаки»: ногами устанавливаем угол атаки спины андроида.
Команды «тормозить», «назад»: двигаем носки ступней вверх.
Ориентацию андроида частично выполняет гиродин. В плечах и нижней части андроид-водолаза три 3D-датчика ускорений, три 3D-гироскопа. Они определяют вектор подводных течений, стабилизируют траекторию движения, положение андроид-водолаза
КОМПЬЮТЕР ДЛЯ ЛЮБЫХ ГЛУБИН, ДАВЛЕНИЙ: при превышении начального критического давления забортной воды процессор диапазона-1 давлений перепишет свою память в память процессора диапазона-2 давлений, передав обработку информации. Получив ответ процессор диапазона-1 давлений отключится при конечном критическом давлении.
Превышено критическое давление процессора диапазона-2 давлений – перепишет свою память в процессор диапазона-3 давлений, передав обработку информации. Получив ответ процессор диапазона-2 давлений отключится.
Процессор диапазона-3 давлений аналогично дает управление процессору диапазона-4 давлений. Давление снижается – всё в обратном порядке. Материалы полупроводников схемы процессоров подбирают по форме участка вольт-амперной характеристики в данном диапазоне давлений. По аналогичному принципу создается компьютер роботов для работы на поверхности планеты Венера.
ИОННО-ЛУЧЕВЫЕ 3D-ПРИНТЕРЫ изготовят объекты с любым сочетанием химических элементов на молекулярном уровне. Ионные, электронные лучи на неорганических пленках дают линии 2нм.
1991г: компьютерщик Уоррен Робинет, химик Стэн Уильямс наноманипулятором манипулировали отдельными атомами в атомном микроскопе. Наноманипуляторы, софт исправят ошибки ДНК в изготовлении ионно-лучевым 3D-принтером трансгенных людей, клонов людей с сохранением их памяти. Рентгеновский 3D-сканер на частотах электронных переходов атомов, синтезированных биениями рентгеновских частот, отсканирует индивидуальную химическую 3D-карту мозга человека для клонирования его электрохимической памяти, сознания.
Лунная промышленность производит космические ракеты, роботов терраформирования Марса. Роботы бомбардируя против движения (уменьшение орбиты) Марс ледяными, кислородсодержащими, водородсодержащими, урансодержащими астероидами, дадут Марсу моря, кислородную атмосферу, энергию.
Температура, давление Венеры рентабельны в горячих техпроцессах машиностроения, в металлопорошковых 3D-принтерах. Человек андроидами разовьёт машиностроение Венеры c костюмов телеприсутствия в отелях дирижаблей на высоте 50км. Готовые машины, роботы дирижабли поднимут вверх 50км в космодромы поддерживаемые системой позиционирования дирижаблей по радиомаякам внизу
КОСМИЧЕСКИЙ АНДРОИД на Луне может работать на местного производства топливе типа «алюминий + кислород + турбина», «магний + кислород + турбина».
Андроиды захватывают космические корабли в звездных войнах: летят к кораблю, режут обшивку одноразовыми термитными резаками, линейными кумулятивными зарядами, проникают внутрь.
У Юпитера мощные электромагнитные поля: андроид кабелем сложит на поверхности спутника Юпитера большой виток антенны, заряжающей электричеством аккумулятор. В случае падения в пропасть андроид пиропатроном надует шланг-антенну в форме круга покрытого проводящим слоем + снаружи скользкий материал (тефлон) чтоб не цеплялся за камни. Шланг-антенна соберет электромагнитную энергию Юпитера, даст SOS.
Aндроиды-шахтеры рудников Меркурия, Венеры… Андроид-солдат звездных войн за коммерческие планеты, астероиды с рудниками благородных, редкоземельных металлов, с энергоносителями: уран, торий.
Андроиду в планетах с химически агрессивной атмосферой с большими температурой, давлением (Венера) не нужен сверхпрочный корпус для защиты от давления: соединение атмосферы планеты с внутренней полостью робота через фильтр твердых частиц и катализатор с химическим реагентом нейтрализующим агрессивные вещества планеты + обратный клапан.
ЭЛЕКТРОМАГНИТНОЕ ПЕРЕМЕЩЕНИЕ АНДРОИДА НА РАССТОЯНИИ ДО 10000км: андроид двигает Фазированная Антенная Решетка ФАР космического корабля состоящая из мощных катушек с обмоткой. При резком росте, медленном спаде тока (режим-О) катушек, перемещающаяся электромагнитная волна в проводящей оболочке андроида наводит ток индукции, отталкивающий андроид (от корабля) от всегда сфокусированного на нем электромагнитного поля катушек ФАР. При медленном росте, резком спаде тока (режим-Р) катушек токи индукции проводящего корпуса андроида притягивают его к кораблю.
Переключая режимы-О-Р фазы катушек ФАР, поддерживая андроида в определенном диапазоне расстояний от обшивки корабля, бесконтактно быстро двигают андроид вокруг космического корабля. По графику тока (больше амплитуда – ближе андроид. Резко нарастающая, плавно спадающая амплитуда волны в графике – туловище ближе ног) катушки софт определит расстояние до андроида, его положение в пространстве.
Энергию (в супермаховик-гиродин андроида) в андроида шит (в кардане с приводами) с фотоэлементами закачает ультрафиолетовый лазер космического корабля. Обратная связь углами взаимно наводит ультрафиолетовый лазер (на 2 световых маяка шита), фотоэлементный шит.
На внешней поверхности космического корабля человек в костюме телеприсутствия силовым гироскопом установит удобное для работы положение туловища андроида от поверхности корабля
ПРИЖИМ АНДРОИДА К АСТЕРОИДУ: к поверхности корабля, астероида или кометы андроида прижимает (через 3D-кардан на голове андроида) 100-метровый манипулятор (по технологии «кокон»), приводы обратной связи которого не ограничивают перемещение андроида перпендикулярно вертикали андроида. Вертикаль андроида устанавливает человек, датчик андроида или софт по карте. Супермаховик-гиродин андроида: 2 маховика противоположного вращения на оси-1 внутри 3D-кардана с приводами.
Инвалидам софт костюма телеприсутствия симулирует руки, ноги стандартными сочетаниями движений плеч, рук, туловища, головы, век, зрачков, челюсти. Андроид повернет ногами в сторону большего размаха или углов наклона по 3 осям локтя, предплечья, плеча, туловища, головы, ресницы. Дизайнер через костюм телеприсутствия виртуальным пластилином лепит дизайн автомобиля, скульптуры
Костюм телеприсутствия в книгах:
1969г: Гарри Гаррисон «Древо жизни»: обучение в аватар-классе школы.
1987г: Станислав Лем «Мир на Земле»: управление андроидами в колонизации планет, в шахтах и спасательных службах.
 3)
МОИ АЛГОРИТМЫ ХОДЬБЫ, БЕГА, АКРОБАТИКИ И РУКОПАШНОГО БОЯ АНДРОИДОВ
3)
МОИ АЛГОРИТМЫ ХОДЬБЫ, БЕГА, АКРОБАТИКИ И РУКОПАШНОГО БОЯ АНДРОИДОВ
(статье 29 раз вредили) Если удельная мощность, скорость андроида не меньше чем у человека, высокая точность вычислений не нужна. Процесс перехода устойчивого динамического равновесия в неустойчивое длится 3-4 раза дольше одного шага при повторяемости тактов движения. Софт малыми поправками держит повторяемость тактов движений.
Алгоритмы ходьбы, бега и защиты от толчка андроида – это Дерево таблиц обратной связи. Дерево таблиц – таблицы решений уравнений с десятками переменных (цифры датчиков андроида). У каждого датчика угла, силы и ускорения андроида свой номер, своя верхняя ветвь Дерева таблиц с сотнями таблиц, дающих выходную цифру для одного номера привода андроида. Этот номер привода тянет 1 трос андроида.
В этих таблицах клетки для одного номерного датчика андроида различаются только разрешенным узким диапазоном цифр. Цифра номерного датчика андроида входит в этот узкий диапазон цифр – работает только эта таблица. Остальные тысячи таблиц бездействуют.
Выходные цифры верхних ветвей Дерева таблиц идут в нижние ветви Дерева таблиц. Каждая нижняя ветвь Дерева таблиц – это таблицы для одного номера привода андроида, представляющие собой возможные варианты сочетаний в одной таблице всех выходных цифр верхних ветвей Дерева таблиц.
Совпадение по всем цифрам в одной таблице дает выходной сигнал (цифру), по которому этот номер привода тянет 1 трос андроида в реальном времени. Аналогично работают таблицы остальных номеров привода андроида.
Алгоритм делит все движения андроида на малые периоды, давая скорость тросов и углы к концу периода.
Период работы Дерева таблиц заканчивается, начинается новый период опроса цифр датчиков андроида. Частота периодов Дерева таблиц от 30Hz в дешевых моделях андроидов до 2000Hz в дорогих моделях.
Частота передачи сигнала обратной связи «костюм телеприсутствия – андроид» обычно 10Hz (частота управления. зависит от настроек, расстояния) на больших расстояниях, но Дерево таблиц требует частоту сканирования датчиков не меньше 30Hz – сигнал обратной связи «костюм телеприсутствия – андроид» передает скорость изменения цифр для режима «ПРОГНОЗ».
Дерево таблиц можно заменить Деревом уравнений – этот вариант хуже держит радиацию.
АЛГОРИТМ ПОПЕРЕЧНОЙ СТАБИЛИЗАЦИИ ХОДЬБЫ, БЕГА
Нагрузка на левую ступню выросла в сравнении с правой ступней – при касании левой ступней пола боковой привод левого бедра и привод тазобедренного балансира наклоняют туловище андроида вправо по цифрам датчика угла наклона туловища и шаговых импульсов в ступнях.
Покачивания туловища вправо-влево дают поперечную стабилизацию андроида.
Если при правой опорной ноге андроид заваливается вбок-вправо-назад – он ставит левую ногу сзади опорной ноги в направлении заваливания, затем в том же направлении переставляет правую ногу, увеличивая время (импульс) опоры на неё.
Если при правой опорной ноге андроид заваливается вбок-вправо-вперед – он ставит левую ногу спереди опорной ноги в направлении заваливания, затем в том же направлении переставляет правую ногу, увеличивая время (импульс) опоры на неё.
АЛГОРИТМ ПРОДОЛЬНОЙ СТАБИЛИЗАЦИИ ХОДЬБЫ, БЕГА – разница в длине шага человека <1% – софт уравнивает длину шагов по цифрам плечевых датчиков продольного горизонтального ускорения. Или по цифре нижнего датчика поперечного горизонтального ускорения туловища.
ВЕРТИКАЛЬ АНДРОИДА – продольная ось туловища, проходящая через его центр масс и среднюю точку между плечами. Сигнал вертикали андроида берется с датчика наклона (отвес) туловища. В ходьбе, беге андроид по сигналу датчика наклона сгибает больше колено с той стороны, где выше точка опоры.
СИСТЕМА СТАБИЛИЗАЦИИ ВЕРТИКАЛИ АНДРОИДА работает по принципу – шаговый импульс в толчке ступни равен шаговому импульсу в приземлении ступни. Если шаговый импульс в толчке больше – вертикаль андроида приводы наклоняют вперед. Если шаговый импульс в приземлении больше – вертикаль андроида приводы наклоняют назад.
При ходьбе, беге на повороте принцип – углы отклонения вбок от продольной вертикальной плоскости для правой и левой ноги одинаковы.
ПРОДОЛЬНАЯ ВЕРТИКАЛЬНАЯ ПЛОСКОСТЬ – плоскость проходящая через вертикаль андроида, параллельная вектору движения андроида в ходьбе, беге. На повороте продольная вертикальная плоскость наклоняется вбок вместе с вертикалью андроида.
ВАРИАНТ-2: Система стабилизации вертикали андроида приводами держит вертикаль андроида в положении, в котором при толчке ступни шаговый импульс-1 в тросе-1, равен шаговому импульсу-2 в тросе-2 при приземлении ступни.
Шаговый импульс-1 – импульс действующий на нагруженный трос-1 тазобедренного балансира андроида. Импульс в тросе – это средняя сила в тросе умножить на время действия этой силы.
Трос-1 – трос не дающий туловищу андроида завалиться назад при толчке ступни.
Трос-2 – трос тазобедренного балансира не дающий туловищу андроида завалиться вперед при приземлении ступни.
При ускорении ходьбы, бега андроида Система стабилизации вертикали андроида наклоняет туловище вперед.
При замедлении ходьбы, бега андроида Система стабилизации вертикали андроида наклоняет туловище назад.
Скорость ходьбы, бега постоянна – Система стабилизации вертикали андроида держит туловище вертикально.
Система стабилизации вертикали андроида экономит энергию андроида в ходьбе и беге, выравнивая нагрузку на тросы группового привода андроида.
Основной канал системы стабилизации вертикали андроида при ходьбе, беге работает по таблицам решений «разница шаговых импульсов в тросах-1-2 – продольный наклон туловища», «разница шаговых импульсов в тросах-3-4 – поперечный наклон туловища».
Дублирующий канал системы стабилизации вертикали андроида при ходьбе, беге работает по разнице сигналов нижнего и верхних датчиков ускорения туловища.
АЛГОРИТМ СЛЕПОЙ СПРИНТЕРСКИЙ БЕГ НА НОСКАХ СТУПНЕЙ (пятки не касаются земли, слепой бег без телекамер)
Угол-В бедра – угол между вертикалью и проекцией на Продольную вертикальную плоскость продольной оси толкающего бедра в Нулевой точке шага.
Если бедра угол-В к вертикали растет, алгоритм наклоняет вниз верхнюю часть туловища андроида, уменьшает длину шага андроида.
Если бедра угол-В к вертикали уменьшается, алгоритм поднимает верхнюю часть туловища андроида, увеличивает длину шага андроида.
Продольный критический угол туловища – угол между вертикалью и проекцией на продольную вертикальную плоскость бега андроида линии, соединяющей центр масс андроида и точку опоры ступни в момент максимальной силы толчка этой ступни.
Если Продольный критический угол туловища меньше нормы (наклон слишком назад) – алгоритм уменьшает угол колена в нулевой точке шага.
Если Продольный критический угол туловища больше нормы (наклон слишком вперед) – алгоритм увеличвает угол колена в нулевой точке шага.
Нулевая точка шага – точка в которой приземление ступни с торможением заканчивается – продольное ускорение центра масс туловища равно нулю. Чем больше скорость, тем больше алгоритм ходьбы и бега смещает нулевую точку шага в сторону задней части ступни. При торможении чем больше скорость, тем больше алгоритм ходьбы и бега смещает нулевую точку шага в сторону передней части ступни.
Если поверхность по которой бежит андроид, неровная – тогда при приземления носка ступни на бугор – точка-R – алгоритм слепого бега находит (по таблице решений «горизонтальное ускорение – высота бугра») высоту бугра в точке-R и на 97% этой высоты сильнее сгибает в колене ногу, на ~3% этой высоты поднимает центр масс туловища обратной связью приводов ног с вертикальным ускорением центра масс туловища (датчики ускорения туловища).
Если ступня андроида приваливается в яму в точке-R – алгоритм слепого бега увеличивает угол-В бедер в беге, понижает центр масс.
Слепой спринтерский бег на повороте: андроид использует 2 датчика силы носка ступни андроида и 3 датчика силы в пятке. Суммарный импульс силы (цифру средней силы датчика силы умножаем на время её приложения) двух датчиков силы носка левой ступни андроида должен быть равен суммарному импульсу силы двух датчиков силы носка правой ступни.
АЛГОРИТМ СЛЕПОГО БЕГА (без телекамер)
При приземлении и толчке ступни алгоритм обратной связью приводов поддерживает параллельность между вектором силы реакции опоры ступни и линией наклона 2D-отвеса в туловище андроида. Вектор силы реакции опоры ступни равен по величине векторной сумме силы тяжести и силы инерции.
Работу алгоритма обеспечивают:
1. 2D-датчик угла наклона + 3D-гироскоп + 3D-акселерометр в туловище андроида.
2. два датчика силы в носке ступни андроида и 3 датчика силы в пятке.
3. управление углом колена в Нулевой точке шага.
4. управление наклоном туловища от вертикали.
Левый поперечный критический угол туловища – угол между вертикалью и проекцией на поперечную вертикальную плоскость бега андроида линии, соединяющей центр масс андроида и точку опоры левой ступни в момент максимальной силы толчка этой ступни.
Обратная связь приводов андроида с датчиками по таблице решений «Левый поперечный критический угол туловища – угол-В бедра – угол колена в Нулевой точке шага».
Поперечная плоскость бега – вертикальная плоскость проходящая через центр масс андроида, перпендикулярная продольной плоскости бега.
Угол-В бедра – угол между вертикалью и проекцией на Поперечную плоскость бега продольной оси толкающего бедра в Нулевой точке шага.
Правый поперечный критический угол туловища – угол между вертикалью и проекцией на поперечную вертикальную плоскость бега андроида линии, соединяющей центр масс андроида и точку опоры правой ступни в момент максимальной силы толчка этой ступни.
Обратная связь приводов андроида с датчиками по таблице решений «Правый поперечный критический угол туловища – угол-В бедра – угол колена в Нулевой точке шага». Небольшие вертикальные препятствия пробегаются на согнутых ногах, ямы на вытянутых ногах.
Слепой бег на повороте: андроид использует 2 датчика силы носка ступни андроида и 3 датчика силы в пятке. Шаговый импульс (цифру средней силы датчика силы умножаем на время её приложения) датчика силы левой пятки андроида должен быть равен шаговому импульсу датчика силы правой пятки при приземлении ступни.
Шаговый импульс может измерять конденсатор по величине заряда или магнитно-индукционный датчик на основе постоянного магнита.
Суммарный шаговый импульс датчиков силы носка левой ступни андроида должен быть равен суммарному шаговому импульсу датчиков силы носка правой ступни при толчке ступни.
Если в левой ступне шаговый импульс на 5% больше чем в правой ступне – алгоритм на 5% увеличит (больше усилие ноги, дольше прижим ступни к земле) шаговый импульс в правой ступне. Аналогично если в правой ступне шаговый импульс на 5% больше.
Для уменьшения радиуса бега алгоритм уменьшает угол колена в нулевой точке шага, увеличивает разность длины шагов. Для роста радиуса бега алгоритм увеличивает угол колена в нулевой точке шага, уменьшает разность длины шагов.
Торможение бега: алгоритм увеличивает углы колен в Нулевой точке шага, уменьшает шаг. Разгон: софт увеличивает шаг и углы колен в Нулевой точке шага.
Туловище андроида начало заваливаться вперед – определяется по превышению шагового импульса в датчиках силы пятки андроида при приземлении ступни, над суммарным шаговым импульсом датчиков силы носка ступни при толчке. Алгоритм увеличит шаг по таблице решений «разность шаговых импульсов – длина шага», увеличением частоты шагов, увеличит угол колена в Нулевой точке шага и разнос рук вперед–назад.
Туловище андроида начало заваливаться назад – определяется по превышению суммарного шагового импульса датчиков силы носка ступни при толчке, над импульсом датчиков силы пятки при приземлении. Алгоритм уменьшит шаг и угол колена в Нулевой точке шага, увеличит частоту шагов.
Туловище андроида начало заваливаться влево – определяется по: максимальная средняя сила датчиков силы правой ступни стала больше чем в левой ступне. Алгоритм увеличит максимальную среднюю силу левой ступни и угол правого колена в Нулевой точке шага, слегка завалит туловище вправо.
Туловище андроида начало заваливаться вправо – определяется по: максимальная средняя сила датчиков силы левой ступни стала больше чем в правой ступне. Алгоритм увеличит максимальную среднюю силу правой ступни и угол левого колена в Нулевой точке шага, слегка завалит туловище влево.
Уменьшение скорости перемещения андроида: алгоритм по принципу «импульс в ступне андроида при приземлении равен импульсу при толчке» уменьшит шаг, увеличит частоту шагов и угол колена в Нулевой точке шага.
Увеличение скорости перемещения андроида: алгоритм по принципу «импульс в ступне андроида при приземлении равен импульсу при толчке» увеличит шаг, частоту шагов и угол колена в Нулевой точке шага.
Уменьшение радиуса поворота при перемещении андроида: по принципу «максимальная средняя сила датчиков силы левой ступни в Нулевой точке шага равна максимальной средней силе датчиков силы правой ступни» алгоритм уменьшит длину шага, увеличит угол колена в Нулевой точке шага на ноге с внутренней стороны поворота.
Увеличение радиуса поворота при перемещении андроида: по принципу «максимальная средняя сила датчиков силы левой ступни в Нулевой точке шага равна максимальной средней силе датчиков силы правой ступни» алгоритм увеличит длину шага, уменьшит угол колена в Нулевой точке шага на ноге с внутренней стороны поворота.
Торможение в повороте: по принципу «одинакова максимальная средняя сила датчиков обоих ступней» алгоритм уменьшит длину шага, увеличит в ногах угол колена в Нулевой точке шага. Максимальная средняя сила передних датчиков силы ступни андроида меньше максимальной средней силы в датчике силы пятки.
Разгон в повороте: по принципу «одинакова максимальная средняя сила датчиков обоих ступней» алгоритм увеличит длину шага и угол колена в Нулевой точке шага в ногах. Максимальная средняя сила передних датчиков силы ступни больше максимальной средней силы в датчике силы пятки.
Угол спуска, подъема земли алгоритм определяет по величине несовпадения ускорения в нижнем 3D-датчике ускорения туловища, с ускорением вычисленным (таблица решений) по цифрам датчиков сил ступней.
В беге, ходьбе компенсация реактивного момента вращения (вертикальная ось) поворотом туловища в противоположную (вертикальная ось) реактивному моменту сторону + движения рук вперед-назад.
При нехватке компенсирующего момента – алгоритм увеличит наклон туловища вперед и углы колен в Нулевой точке шага.
Плоскость слепого бега ног андроида, алгоритм строит по сигналам 3D-датчиков ускорений, 3D-гироскопа туловища.
У андроида два 3D-датчика линейного горизонтального ускорения в плечах и один в центре нижней части туловища. Продольное ускорение нижней части туловища больше – андроид тормозит уравнивая ускорения. Продольное ускорение верхней части туловища больше – андроид разгоняется уравнивая ускорения.
Поперечное ускорение верхней части туловища больше, андроид заваливается влево – андроид двигает ноги вбок влево уравнивая нагрузку на обе ноги по датчикам силы ступней.
При ходьбе, беге датчики ускорения в плечах андроида имеют разное продольное ускорение. Алгоритм находит их среднее значение.
По ускорениям верхней и нижней части туловища находится вертикаль андроида в продольной и поперечной вертикальных плоскостях андроида. Сигналы продольных, поперечных ускорений алгоритм корректирует по цифре угла между туловищем и тазобедренным балансиром андроида: в трафик обратной связи идет откорректированный (проекции ускорений на продольную и поперечную вертикальные плоскости андроида) сигнал.
По цифрам этих 3-х датчиков ускорения алгоритм по закону-2 Ньютона вычислит оба угла направления на снайпера который выстрелил в туловище андроида.
Расчет вектора ходьбы (бега): боковые движения туловища
При ходьбе туловище андроида раскачивается право-лево уменьшая шаговый момент, вращающий туловище в вертикальной оси. Расчет вектора ходьбы (бега): суммарный вектор (3 датчика ускорения туловища + датчик наклона туловища от вертикали) скорости за 2 последовательных шага. Отсчет времени 2 шагов по сигналам датчиков силы ступней. Вектор ходьбы за эти 2 шага свернул влево – увеличим время толчка левой ступни, уменьшим время толчка правой ступни.
АЛГОРИТМ БОКОВОЙ ХОДЬБЫ
Правая нога ставится на шаг вправо. Затем левая на шаг вправо. Процесс повторяется. Туловище андроида заваливается вперед – суммарный сигнал (сигнал продольного горизонтального ускорения плеч) плечевых 3D-датчиков ускорения, приводом ступни увеличит шаговый импульс (время опоры носков ступни на землю) носков ступни, уменьшит шаговый импульс пятки.
Туловище заваливается назад – суммарный сигнал (сигнал продольного горизонтального ускорения плеч) плечевых 3D-датчиков ускорения, приводом ступни увеличит шаговый импульс (время опоры пятки ступни на землю) пятки ступни, уменьшит шаговый импульс носка ступни.
В боковой ходьбе вправо туловище андроида заваливается вправо – плечевые 3D-датчики ускорения приводами ног увеличат шаговый импульс (время опоры ступни) левой ступни, уменьшат шаговый импульс правой ступни.
В боковой ходьбе вправо туловище андроида заваливается влево – плечевые 3D-датчики ускорения приводами ног увеличат шаговый импульс (время опоры ступни) правой ступни, уменьшат шаговый импульс левой ступни.
АЛГОРИТМ ПЛАВНОЙ ПОХОДКИ НА НЕРОВНОЙ ДОРОГЕ
На неровной дороге вертикальный (проекция вектора импульса на вертикаль) шаговый импульс переходит с правой ступни на левую и наоборот. Для плавности походки ограничиваем перемещение центра масс андроида вправо-влево. Для этого допускаем перегрузку одной ступни на несколько секунд.
3D-датчик ускорения туловища в верхней части туловища измеряет боковое ускорение туловища. Чем больше боковое ускорение или боковое смещение туловища андроида, тем большую разницу шагового импульса шага обоих ног установит таблица решений алгоритма.
Для перемещения центра масс вбок андроид немного снижая центр масс увеличивает силу и время толчка перегруженной ступни, уменьшает время толчка недогруженной ступни.
Толчок ступни начинается с момента поднятия центра масс андроида. Тормозной толчок ступни начинается с касания ступней земли (фиксирует нижний датчик ускорения туловища), заканчивается в момент поднятия центра масс андроида (фиксирует датчик ускорения туловища).
АЛГОРИТМ ПЕРЕМЕННОГО УСКОРЕНИЯ
Главное внешнее отличие робота от человека – это промежуток от нулевой скорости движения тела, рук, ног до равномерной скорости. Робот проходит этот промежуток с одинаковым ускорением. У человека алгоритм всех движений сначала плавно увеличивает ускорение, затем плавно уменьшает ускорение.
Этот алгоритм андроид отрабатывает обратной связью по таблицам решений «угол – угловое переменное ускорение», «скорость – переменное ускорение». Силовая обратная связь использует датчики ускорения туловища андроида.
АЛГОРИТМ УПРАВЛЯЕМОГО ИМПУЛЬСА СИЛЫ
Цифру шагового импульса толчка задает заранее человек или софт таблицами решений. Человеку помогает софт. Андроид делает толчок рукой, ногой или туловищем.
Если толчок слишком сильный – андроид в реальном времени уменьшает время толчка, подгоняя к заданной цифре импульс толчка. В алгоритме график скорости уменьшения времени толчка.
Если толчок слабый – андроид увеличивает время толчка. График скорости увеличения времени толчка заложен в алгоритм. Пример: в робофутболе важно дать точный импульс мячу ногой робота. У робота в ноге датчик силы + таймер борткомпьютера + алгоритм управляемого импульса силы.
АЛГОРИТМ ПАДЕНИЕ
Андроид падая приседает настолько, насколько должен выбросить в сторону падения ногу-1. Центр масс туловища с руками двигается вниз с таким же ускорением, с каким двигается вперед. Выбросив вперед ногу-1 андроид двигает туловище к точке-Т на полу в плоскости падения центра масс андроида. Точка-Т между ступнями ног после выполнения алгоритма.
После приземления ноги-1 вперед выбрасывается нога-2.
После приземления ноги-2 центр масс туловища с руками движется верх до перехода андроида в стоячее положение.
АЛГОРИТМ ПАДЕНИЕ ВБОК НА СКЛОНЕ ХОЛМА, ЛЕСТНИЦЫ
3D-датчик ускорения определяет траекторию движения центра масс андроида и точку-Х её пересечения с опорной поверхностью. Андроид вытягивает ногу к точке-Х пока датчики силы ступни не зафиксируют опору. Ступня не нашла опору – андроид двигает вытянутую ногу к вертикали центра масс андроида, пока не почувствует опору датчиками силы ступни. Получив опору андроид останавливает смещение вбок центра масс андроида, выравнивает туловище.
СТУПНЯ ОПРЕДЕЛЯЕТ ТИП ПОВЕРХНОСТИ
На твердом полу нагрузка на ступню при шаге 100%. Если наступить на мокрую глину нагрузка на ступню будет меньше. Софт ступни запоминает график изменения силы в датчиках силы ступни, скорость и величину провала ступни в грунт.
По параметрам грунта софт включит таблицу решений «тип грунта – процент понижения центра масс туловища андроида – процент дополнительного вытягивания вниз ноги – процент увеличения времени толчка ступней (импульс ступни)».
АЛГОРИТМ ЗАЦЕПИЛСЯ НОСКОМ СТУПНИ
В ходьбе андроид зацепился носком ступни-1 под предметом. Он переносит свой вес в ступню-1. Переставляет ступню-2 назад. Вытаскивает носок ступни-1 из под предмета. Поднимает ступню-1 выше, наклоняет носок вверх на угол 45°. Делает шаг вперед ступней-1.
АЛГОРИТМ УСИЛЕНИЕ ГРАВИТАЦИИ
Андроид заваливается на одну ногу – эта нога резко подбрасывает вверх туловище (одновременно подняв горизонтально другую ногу в сторону противоположную направлению заваливания туловища), замедленное сгибание толчковой ноги, снова резкий подъем туловища этой ногой: цикл повторяемый 2-3 раза почти вдвое увеличит силу прижимающую туловище андроида к полу, не дает андроиду упасть.
Нежелательное перемещение центра масс андроида в горизонтальном направлении тормозит резкое поднятие центра масс андроида ногами, туловищем и руками.
АЛГОРИТМ ПРОТИВОБУКСОВОЧНАЯ СИСТЕМА
Для быстрого старта с вертикального положения андроид резко приседает, шагая с наклоном вперед. Затем в разгоне вперед для кратковременного улучшения сцепления ступней поднимает свой центр масс. Инерция массы, движущейся вверх, удваивает прижим, трение ступней и линейное ускорение андроида.
АЛГОРИТМ ПОДЪЕМА ПО ЛЕСТНИЦЕ
Подъем по лестнице софт андроида выполнит по сигналам 2-х инфракрасных или ультразвуковых датчиков (или радиовысотомер) расстояния спереди ступни. По графику отраженного сигнала софт раздельно определяет высоту до ступеньки под ступней, расстояние до ступеньки спереди. Аналогично работают 2 датчика сзади ступни при спуске андроида с лестницы.
Ступня пяткой приземляется на грань ступеньки под углом приземления 4-30° от горизонтали. Привязку ступней к передним граням лестницы выполняют алгоритмы стереозрения, привязанные к системе координат от телекамер и вертикали центра масс андроида. При приземлении ступни на переднюю грань ступеньки лестницы 3D-датчики силы ступни определяют вектор силы реакции опоры.
Приводы поддерживают плоскость ступни под углом 90° к вектору силы реакции опоры до пересечения плоскости-Г центром масс андроида. Вертикальная поперечная плоскость-Г – от передней грани ступеньки лестницы. Момент пересечения плоскости-Г определяют датчики ускорения туловища по признакам:
1. центр масс андроида поднялся на высоту ступеньки лестницы
2. вектор силы реакции опоры сравнялся с вертикалью.
3D-датчики силы пятки ступни андроида и 3D-датчики ускорения туловища андроида определяют вектор силы реакции опоры, поперечный и продольный углы приземления ступни и положение центра масс андроида от вертикальной поперечной плоскости-Г.
По цифрам датчиков силы ступни и датчиков ускорения туловища андроид двигает (инерцией туловища и приводами) центр масс на 2-5см вперед. После инерционного переноса центра масс на носок ступни, толчок ступни двигает нижний датчик ускорения туловища вверх по плоскости примерно параллельной плоскости-Н. Плоскость-Н соединяет передние грани нижней и верхней ступенек лестницы.
АЛГОРИТМ ТЯЖЕЛЫЙ РЮКЗАК
Андроид наклоняется вперед. Одновременно приводы наклоняют ноги назад, сгибая их в голеностопных шарнирах, пока не выровняется нагрузка в передних и задних датчиках силы ступней. При ходьбе с рюкзаком приводы используют таблицы решений инерции туловища андроида, добавляя процентную поправку (она постоянна) на инерцию рюкзака.
УПРАВЛЕНИЕ ВСЕМ ТЕЛОМ ДЕРЕВОМ ТАБЛИЦ
Сигналы датчиков сил, ускорений андроида идут на входы таблиц решений ступени-1 дерева таблиц системы управления телом андроида. На вход ступени-1 дерева таблиц идут сигналы всех датчиков андроида. Выходные сигналы ступени-1 идут на вход таблиц решений ступени-2 дерева таблиц. Выходные сигналы ступени-2 идут на вход таблиц решений ступени-3 дерева таблиц. На выходе дерева таблиц – управляющие сигналы всех приводов андроида в реальном времени.
Каждый датчик силы, ускорения андроида имеет свои таблицы решений в ступени-1 дерева таблиц. В беге по пересеченной местности в дерево таблиц добавляются таблицы решений учитывающие высоту точки приземления ступни.
В чемпионате мира по единоборствам андроиды работают в основном по таблицам решений. Как и спортсмены в чемпионатах мира по единоборствах среди людей, где тренировками спортсмены громоздкие вычисления движений мозгом заменяют готовыми таблицами решений – это втрое быстрее.
При создании софта сложных движений андроида достаточно написать таблицы решений «время – координата ключевой точки конечности» (андроидная система координат XYZ). Остальную работу выполнят шаблонные таблицы решений «время – координата шарнира конечности», «время – координаты условных центров плечевых шарниров андроида», «время – координаты левого, правого шарниров таза», которые выполняют отрицательные обратные связи «датчик – привод».
Андроидная система координат XYZ:
Координата X: продольная горизонталь-X проходящая через условный (чтоб не пересчитывать его заново в движениях) центр масс андроида. Условный центр масс совпадает с реальным когда андроид стоит. Канал-X – канал управления продольными движениями андроида.
Координата Y: вертикаль проходящая через условный центр масс андроида. Канал-Y – канал управления вертикальными движениями андроида.
Координата Z: поперечная горизонталь-Z проходящая через условный центр масс андроида. Канал-Z – канал управления поперечными движениями андроида.
РАЗДЕЛЕНИЕ ФУНКЦИЙ УПРАВЛЕНИЯ
При ходьбе, беге андроида (параллельные вычисления) все движения тела разделены на отдельные независимые системы движения приводов, выполняющую свою функцию движения тела андроида. Разделение систем движений по осям координат, по коэффициентам энергопотребления.
У приводов разная процентная скорость движения в таблицах движений. Системы движения приводов пронумерованы. Меньше номер системы движения приводов – больше её коэффициент энергопотребления.
Чем сильнее влияет система движений приводов на тело, тем больше её коэффициент энергопотребления. Не хватает мощности или момента привода – приоритет потребления мощности у системы движения с меньшим номером.
Андроид выполняет приводами одновременно нескольких алгоритмов – энергию привода между алгоритмами распределяют их коэффициенты энергопотребления.
АЛГОРИТМ ВЗАИМНО НЕЗАВИСИМЫЕ СИСТЕМЫ ДВИЖЕНИЯ ПРИВОДОВ в акробатике, ходьбе, беге, прыжках всё делит на канал-X, канал-Y, канал-Z. Эти три канала работают взаимно независимо, раздельно, имеют общие приводы. Три канала софт вычисляет раздельно, объединяя в приводах. Идеология живучести делит сложные системы на отдельные взаимонезависимые системы.
При выполнении движений алгоритм следит чтоб колени и ступни не цепляли друг за друга.
В отличие от андроида Asimo андроид Айзек стоит, ходит, бежит с ровными ногами: его страхует от падения
АЛГОРИТМ РАВНЫЙ ПРОЦЕНТ ХОДА ВСЕХ ПРИВОДОВ
Все приводы проходят одинаковый процент требуемого для движения хода в любой момент времени.
АЛГОРИТМ СТАТУЯ
Алгоритм «статуя» – это мгновенное включение максимальной силы в всех приводах андроида при неизменности всех углов андроида. Алгоритм «статуя» превращает андроида в монолитный жесткий объект за мгновение до приложения максимума силы против соперника, чтоб использовать момент инерции и линейную инерцию тела андроида для усиления движения в 5-7 раз.
АЛГОРИТМ ПОЛНОГО БОЯ АНДРОИДА В ЕДИНОБОРСТВАХ
У андроида-единоборца приемы разделены на элементарные движения. Элементарные движения софт хранит как таблицы решений файлов движения. Файл движений – анимационный файл в котором для шарниров рук, ног андроида указаны допустимые угловые диапазоны кадрового вектора их мгновенного ускорения.
Для выполнения приема софт в библиотеке приемов находит файл движения соперника, дает с таблиц решений файла движений сигнал приводам андроида.
В единоборствах каждый удар, прием, связка 2-х приемов – отдельный софт, отдельный файл с 3D-кадрами движения соперника, отдельные таблицы решений положения тела соперника. Софт ищет подходящий по начальным диапазонам цифр файл с таблицами положения тела соперника, включает его, подключает приводы андроида к соответствующим цифрам таблиц положения тела.
Таблицы положения тела в файле привязаны к цифрам датчикам ступней и приводов, к цифрам трех 3D-гироскопов туловища андроида. Каждому положению тела соперника соответствует 3D-кадр файла движений. В котором виртуальная фигура соперника изображена в этом положении, ракурсе.
3D-кадр-1 файла движений: таблица решений уравнений приводов управляет приводами выбранный прием, связку, силовой перевод тела соперника в 3D-кадр-2 файла положения тела соперника.
Виртуальную фигуру соперника в 3D-кадр-1 файла движений, приводы андроида стыкуют с реальной фигурой соперника по сценарию перехода к 3D-кадр-2 файла положения тела соперника. Софт сканируя таблицы положения тела соперника в 3D-кадр-1 находит адресные команды приводам андроида для перехода в 3D-кадр-2.
Софт по сигналам датчиков андроида определит выполнение команды 3D-кадр-2, выполнит с файла движений переход к 3D-кадр-3. Переход между 3D-кадрами файла движений определяется частотой опроса софтом датчиков андроида.
АЛГОРИТМ УНИВЕРСАЛЬНЫЙ БОРЦОВСКИЙ КОНТРПРИЕМ
Приседание андроида с перемещением ноги в точку движения туловища противника. Соперник совершает бросок – приседание андроида в сторону вектора приложения силы, с передвиганием носка ступни не опорной ноги в точку-В, близкую к той точке, куда соперник хочет бросить андроида. В момент прихода ноги андроида в точку-В, она находится от центра масс туловища андроида на таком же расстоянии, как и носок другой ступни.
Передвигая ногу в точку-В андроид приседает с вертикальным ускорением, равным горизонтальному ускорению центра масс от толчка. При приседании сохраняется первоначальная угловая ориентация туловища.
АЛГОРИТМ УНИВЕРСАЛЬНЫЙ КОНТРПРИЕМ УДАРНЫХ ЕДИНОБОРСТВ: шаг в сторону соперника.
АЛГОРИТМ ЗАЩИТЫ ОТ УДАРОВ В ЕДИНОБОРСТВАХ: выполнить движение чтоб шарик-У не касался поверхности тела андроида или был внутри тела на глубине больше 2см от поверхности тела. Центр шарика-У – расчетная точка удара. Радиус шарика-У 2см – это расстояние на котором сила удара уменьшается в 11-15 раз. Этот алгоритм работает и для человека.
Соперник нанёс
УДАР, ТОЛЧОК СПЕРЕДИ
Андроид приседает в сторону вектора приложения силы, с отодвиганием назад пятки ступни не опорной ноги в точку-В. Точка-В и точка опоры ступни другой ноги находятся на прямой, проходящей через вертикаль от центра масс андроида. Андроид приседает с вертикальным ускорением, равным горизонтальному ускорению от толчка. При приседании сохраняется первоначальная угловая ориентация туловища.
Соперник нанёс
УДАР, ТОЛЧОК СЗАДИ
Андроид приседает вперед в сторону вектора приложения силы, с передвижением вперед носка ступни не опорной ноги в точку-В. Точка-В и точка опоры ступни другой ноги находятся на прямой, проходящей через вертикаль от центра масс андроида. Андроид приседает с вертикальным ускорением, равным горизонтальному ускорению от толчка. При приседании сохраняется первоначальная угловая ориентация туловища.
ПРИ ТОЛЧКЕ, УДАРЕ СБОКУ если вектор направлен чуть назад – в точке-В пятка. Если вектор направлен чуть вперед – в точке-В носок ступни. Остальная часть алгоритма неизменна.
АЛГОРИТМ СПОТКНУЛСЯ В БЕГЕ
Андроид приседает на споткнувшуюся ногу с вертикальным ускорением равным тормозному ускорению туловища от толчка. Продольный, от вертикали, угол наклона вперед туловища увеличивается. Нога-2 выбрасывается вперед к точке-В приземления её носка ступни.
Точка-В и точка опоры ступни другой ноги находятся на прямой, проходящей через вертикаль от центра масс андроида.
Андроид приседает с вертикальным ускорением, равным горизонтальному ускорению от толчка. При приседании сохраняется первоначальная угловая ориентация туловища. Центр масс туловища перемещается по прямой наклоненной на угол 45° к вертикали. Если после толчка инерция не погашена – повтор алгоритма с новыми шагами.
Споткнувшийся на спуске андроид приседает с вертикальным ускорением V на m% больше горизонтального ускорения G. По таблицам решений «V-m-G», «h-m». Где h – угол наклона спуска. Таблицы невыполнимы – группировка, перекат через плечо с стороны падения.
АЛГОРИТМ СПОТКНУЛСЯ
При ходьбе нога задела тяжелый объект, андроид начал падать вперед – руки андроида мгновенно начинают вращаться спереди сверху вниз, сзади снизу-вверх. Момент от вращения рук в горизонтальной оси проходящей через плечи не дает андроиду быстро упасть вперед. Замедление падения дает андроиду время выставить вперед ногу для прекращения падения.
АЛГОРИТМ ДИАГОНАЛЬНЫЙ ТОЛЧОК
Продольный, поперечный каналы движения работают раздельно. Их сигналы в приводы андроида софт геометрически суммирует, даёт на привод. У дерево таблиц отдельные ветви продольного, поперечного каналов движений: соответственно точки-В1-В2, таблицы решений «В1 + В2 = В».
Софт мозга человека может при необходимости в время ходьбы нагружать одну ногу больше другой: при переноске тяжелой сумки или когда повреждена нога. Софт таблицами решений управляет функцией постоянного баланса нагрузки ног. Андроид при соответствующей мощности, скорости, точности привода конечностей выполнит любые сложные движения точнее, быстрее любого человека.
Эстетика спортивной гимнастики высоко ценит хлёсткость движений: движения на короткое время заканчиваются неподвижным состоянием, переход к нему с максимальным тормозным ускорением.
АЛГОРИТМ ХЛЁСТКОСТИ ДВИЖЕНИЙ: ускорение минус 100% перед остановкой всех движений на 0,7 секунды.
Спринтерский бег отличает от стайерского длинные шаги на носках ступней, согнутые в нулевой точке шага колени, низкое положение центра масс, наклон вперед туловища.
АЛГОРИТМ ЛЫЖНИКА
Туловище андроид-лыжника заваливается назад – чуть приподнять туловище, слегка уменьшить расстояние между носками лыж для роста трения лыж, перенести вес на пятки.
Туловище андроида заваливается вперед – чуть присесть, уменьшить трение лыж сделав их параллельными, перенести вес в переднюю часть ступней.
На повороте туловище заваливается наружу – чуть присесть. Туловище андроида заваливается внутрь поворота – чуть поднять туловище.
Для поворота направо носок правой лыжи повернуть налево или направо (если скорость не больше Х) чтоб увеличить трение правой лыжи. Часть алгоритма лыжника подходит для сноубордиста.
АЛГОРИТМ ПАЛЬЦЕВ
При захвате, удержании предмета разница сил в пальцах нулевая.
АЛГОРИТМ РАБОТЫ КИСТИ АНДРОИДА С ИНСТРУМЕНТОМ
Кисть андроида работает с инструментами отвертка, ключ, пассатижи – алгоритм приводом ограничит силу в пикселях пальцев. Физическая модель техоперации по стереокартинке телекамер вычислит положение оси вращения винта, болта, гайки. Сделав телекамеры андроида неподвижными относительно винта, болта, гайки, алгоритм руками андроида проводит техоперацию. Выходной сигнал алгоритма руками, пальцами андроида отрабатывает силовая обратная связь. Алгоритм может работать используя только силовую обратную связь.
Положение оси вращения винта, болта, гайки можно определить без телекамер по вектору движения инструмента при срыве отвертки, ключа, пассатижей, как это с закрытыми глазами делает человек. Вектор движения инструмента при срыве определят 3D-пиксели силы тактильных матриц или 3 разнесенных датчика ускорения ладони андроида. Функцию упора андроида ногами для работы ручным инструментом выполнит софт.
АЛГОРИТМ ТАКТИЛЬНОГО ОПРЕДЕЛЕНИЯ ФОРМЫ, РАЗМЕРА ПРЕДМЕТА
Пальцы андроида определяют предмет по динамике сил в пальцах и углам фаланг. Это цифры Тактильных таблиц решений с узкими диапазонами углов и узкими диапазонами сил для каждой эталонной формы, для каждого узкого диапазона размеров предмета. Диапазон сил: минимальная сила удержания предмета, максимальная сила не повреждающая предмет.
АЛГОРИТМ ЗАХВАТА СКОЛЬЗКИХ ПРЕДМЕТОВ
Поверхность захвата пальцами андроида скользкого объекта софт делит на малые поверхности, в которых диапазон углов наклона поверхности к вертикали 2°. В каждой с этих поверхностей сумма сил в приложенных тактильных пикселях складывается и умножается на коэффициент-Н зависящий от угла наклона поверхности к вертикали.
Эта выходная цифра складывается на всех малых поверхностях – сила трения. Коэффициент трения измеряют пальцы. Софт вычислит минимальную силу захвата скользкого объекта.
АЛГОРИТМ ДАТЧИКА ПРОСКАЛЬЗЫВАНИЯ
В ладони, в кончиках пальцев или в ступне совмещенный стереомикрофон с грузиками приклеенными к мембранам обоих мономикрофонов. Находим произведение амплитуды и частоты колебаний мембран в обоих мономикрофонах. Получаем величину-1 и величину-2.
Длина пути проскальзывания равна корню квадратному из суммы квадратов величины-1 и величины-2. Направление проскальзывания определяем по фазе разностной частоты. Тангенс угла вектора проскальзывания равен величине-1 деленной на величину-2.
АЛГОРИТМ ВЫЧИСЛЕНИЯ ОБЪЕМА ЖИДКОСТИ
Двигая стакан вправо-влево пальцы андроида определяют количество жидкости в стакане по росту времени действия бокового импульса из-за движения жидкости (по таблице решений «масса предмета – горизонтальное ускорение предмета – процентный рост времени импульса»).
ЗАЩИТА ОТ ПРОДОЛЬНЫХ КОЛЕБАНИЙ ТРОСА при обратной связи привода с датчиком силы: таблицы решений «частота паразитных колебаний – линейный график корректирующего сигнала электромагнитной муфты привода», «скорость роста (уменьшения) силы на тросе – линейный график корректирующего сигнала электромагнитной муфты привода».
Вариант-2: в концах троса датчики ускорений. Датчик-1 у привода троса. Датчик-2 на дальнем от привода конце троса. По сигналу с датчика-2 софт привода сдвигает фазу резонансного колебания сигнала датчика-1 на полпериода вперед.
Вариант-3: коррекция фазы по принципу минимума разностного сигнала обоих датчиков ускорения отдельно по каждой частоте. Результат: противофазное затухание 2-х встречных продольных волн колебаний троса, ресурс троса вдвое больше, андроид бесшумен.
Выше центр масс в конструкции андроида – проще, надежнее софт ходьбы, бега андроида.
Андроид Honda Asimo в конце каждого шага сильно тормозит, теряя энергию, скорость. Для плавных ходьбы, бега без торможений: балансирная подвеска верхних шарниров бедер + пружины компенсирующие силу тяжести +
АЛГОРИТМ ПЛАВАЮЩАЯ ПОХОДКА
Бедро медленнее голени, голень медленнее ступни за счет ускоренного движения ступней.
АЛГОРИТМ ПРЫЖОК ВВЕРХ
В прыжке вверх андроид увеличит взлетный импульс, подкинув вверх руки и наклоненное туловище.
АЛГОРИТМ ВОЛЧКА: для вращения тела в его продольной оси сложи вместе выпрямленные ноги. Руки жми к телу или вытяни в оси тела. Наклони тело вперед на несколько градусов в талии. Живот с стороны угла сгиба тела, т.е. угла пересечения продольных осей туловища, ног.
Включи мышцы живота, бедер справа спереди с углом 45° к плоскости живота, расслабь мышцы с противоположной стороны. Угол сгиба тела повернется по часовой стрелке в сторону напряженных мышц, тело человека на угол 45° повернется против часовой (взгляда с стороны головы) стрелки.
Вращая угол сгиба тела по часовой стрелке ты вращаешь тело против часовой стрелки. Процесс можно продолжать бесконечно в любую сторону или мгновенно прекратить. Этим алгоритмом в воде я вращался бочкой 2об/сек. Сила тяжести не влияет. В невесомости без сопротивления воды вдвое быстрее.
Алгоритм ВОЛЧОК применяется при любом падении, чтоб андроид всегда падал лицом вниз, дальше зашагивание выравнивает вертикаль тела. Алгоритм ВОЛЧОК позволяет андроиду держать ноги ровными: при заваливании в любую сторону андроид падает лицом вниз с зашагиванием, выравнивая вертикаль тела. При группировке алгоритм волчок приземляет андроида на плечо.
АЛГОРИТМ ПАДЕНИЯ НАЗАД
При падении андроида назад включается Алгоритм Волчка. Андроид сгибается вперед на 4° градуса, делает поворот туловища вокруг продольной оси туловища на 180° градусов, приземляется на руки.
АЛГОРИТМ ПОПЕРЕЧНОГО ВОЛЧКА (вращение андроида вокруг поперечной горизонтальной оси) в безопорном режиме: андроид вращая воображаемые велосипедные педали вращается в противоположном педалям направлении вращения. Поменяв направление вращения воображаемых педалей андроид меняет направление своего вращения.
В всех алгоритмах выше при ходьбе, беге требуется гасить или ускорять реактивный момент от оси позвоночника робота движениями рук, иногда ног и туловища.
АЛГОРИТМ МИКРОЛИФТ
Отличие андроида от человека – покачивание андроида от резких остановок движения. Человек плавно уменьшает ускорение частей тела. Алгоритм: обратная связь таблицами решений «датчик ускорения – привод троса» или «датчик силы – привод тросов».
Дешевый микролифт: троса натяжной ролик с прогрессивной подвеской + фрикционный амортизатор. Функцию фрикционного амортизатора выполняет трение шарниров подвески ролика. Трение шарниров конструктор микролифта подбирает кинематикой подвески, размерами трущейся поверхности шарниров подвески натяжного ролика троса. Масло нельзя в шарнирах – трение меняется от температуры. Компьютерный амортизатор работает лучше. Софт компенсирует изменение длины троса натяжным роликом.
Радиовысотомеры, инфракрасные высотомеры носков ступней андроида не находят точку касания в ходьбе, беге в реальном времени, если яма размерами больше 1 шага. Координаты точки касания пятки по длине внешнего фокуса телекамеры, по стереокартинке, таблицы решений.
АЛГОРИТМ МИКРОЛИФТ ПОВЕРХНОСТИ
1. ультразвуковой микролифт плавного торможения предмета перед бесшумным касанием твердой поверхности.
2. емкостный микролифт
3. софт по длине внешнего фокуса
Тест микролифта рук: качество карандашного рисунка полутонами на твердой поверхности.
Автомат стабилизации силы захвата кистью: таблицы решений «вес – угол от вертикали – сила захвата» стабилизируют силу.
АЛГОРИТМ ВЕКТОРА СИЛЫ НАЖАТИЯ КНОПКИ
Софт по тактильному сигналу пальца определяет плоскость поверхности кнопки и перпендикулярно ей устанавливает вектор силы нажатия кнопки андроидом.
АЛГОРИТМ ПТИЦЫ
Продольная угловая инерция робот-птицы максимальна для управляемости. В среднем положении центр давления крыла совпадает с горизонтальной плоскостью от центра масс. Определяют датчики момента шарнир-1 (номера от центра масс) крыла робот-птицы. Затем передняя кромка крыла поворачивается вверх, двигается вверх-вперед.
Крутка крыла: дальше хорда от центра масс – больше угол атаки. Крылья максимально вперед для гребка. Робот-птица совершает гребки вращением (сверху вперед, снизу назад) предплечья крыла, соединенного с корпусом карданом. Угол атаки предплечья крыла поворотом кардана по-против часовой стрелки меняет кулачковый (кривошипно-шатунный) механизм без отдельного двигателя.
Корпус в полете заваливается передом вниз: оси вращения (в кардане) предплечий крыла алгоритм направит вперед + алгоритм двигает хвост вверх.
Корпус в полете заваливается хвостом вниз: оси вращения (в кардане) предплечий крыла алгоритм направит назад + алгоритм двигает хвост вниз.
Корпус в полете заваливается вправо: ось вращения предплечья левого крыла алгоритм направит назад + алгоритм завалит хвост вниз с одновременным поворотом (вид сзади) его по часовой стрелке.
Корпус в полете заваливается влево: ось вращения предплечья правого крыла алгоритм направит назад + алгоритм завалит хвост вниз с одновременным поворотом (вид сзади) его против часовой стрелки.
Гребок: суммарный центр давления крыльев двигается вниз-назад по прямой, проходящей чуть спереди центра масс робот-птицы. Крылья вниз до сближения их плоскостей вертикально по ходу движения. В этом положении их алгоритм поднимает вверх-вперед для гребка.
Суммарный центр давления крыльев стал выше центра масс робот-птицы – алгоритм раздвинет крылья. Угол атаки крыльев в гребке вверх ставит нулевым сигнал изобретенного мной 2D-датчика вектора встречного потока. 2D-датчик вектора, скорости встречного потока: пьезоизлучатель + вертикальная матрица пьезоприемников + обогреватель для защиты от обледенения при минусовых температурах.
Пьезоизлучатель выдает одиночный треугольный (резко нарастает, медленно спадает) импульс. Пьезоприемник, до которого раньше дошел импульс, снова включит пьезоизлучатель. Процесс повторяется. По частоте этого процесса определяем скорость воздушного потока. В матрице все пьезоприемники стоят на одинаковом расстоянии от пьезоизлучателя.
В матрице пьезоприемников выходной сигнал номерного пьезоприемника, у которого самый мощный сигнал или до которого первым дошел сигнал, выключает на стандартное время (зависит от скорости самолета) выходные сигналы всех остальных пьезоприемников матрицы. По номеру пьезоприемника матрицы, отключившего остальные пьезоприемники, 2D-датчик определит угол атаки самолета.
Этот датчик вектора и скорости потока работает в любых газах, жидкостях. Его ультразвук скалывает лед, тогда как трубку Пито выключает лед. 2D-датчик точно, безиннерционно заменит на самолетах датчик воздушного давления (трубка Пито для измерения скорости самолета), датчик угла атаки, не отражая лучи радара он работает также на сверхзвуковых, гиперзвуковых скоростях.
Матрицы ультразвуковых датчиков на поверхности (компьютер видит все потоки воздуха) беспилотника позволят сажать его на авианосец без обмена датчиковой информацией с компьютером авианосца. Аналогичную систему как датчики расхода воздуха, датчики влажности в автомоторы.
Мой ультразвуковой 3D-датчик скорости и вектора (направления) потока работает также в воде – лучший датчик скорости и вектора потока для подводных беспилотников, подводных лодок. За 5 лет 4 раза это описание (под разными номерами пунктов) моего ультразвукового датчика скорости и вектора воздушного потока заменили вредительским текстом или удаляли ключевую информацию. В 2017г удалили про сигнал угла атаки самолета
АЛГОРИТМ 4-КОЛЕСНЫЙ РОБОТ
4-колесный робот тип кентавр с вращающейся башней с 2 руками + кузов сзади для перевозимых грузов. Ось башни с руками чуть наклонена вперед.
4-колесный робот наезжает левым передним колесом, выдвигая его рычагом вперед, на высокой выступ высотой больше диаметра колес. затем рычаг продольного перемещения левого колеса фиксируется, робот наезжает правым передним колесом, выдвигая его рычагом вперед, на высокой выступ.
Зафиксировав все 4 колеса робот поднимает вперед и на максимальную высоту свой центр масс. Набрав максимальную скорость этого движения робот использует инерцию центра масс для продвижения вперед-верх передних колес робота по высокому выступу при неподвижных задних колесах. Робот перемещает центр масс вперед-вверх.
Затем двигая центр масс назад-вниз временно уменьшает нагрузку задних колес с их продвижением вперед-вверх. Циклы повторяются. При наезде левым колесом на валун приводы рычагов подвески поднимают левое колесо на валун по обратной связи с датчиком продольного давления левого колеса, с датчиком его вертикального давления, с датчиком 2 углов отклонения робота от вертикали. Алгоритм поддерживает постоянным вертикальное давление всех колес робота, равенство цифр всех датчиков давления
АЛГОРИТМ КОШАКА
У 4-колесного робота подвеска колес на 2-звенных рычагах, позволяющим выдвигать передние колеса вперед, задние колеса назад. Робот переезжает через большое бревно или яму по алгоритму кошака: вначале выдвигается вперед 1 переднее колесо. Оно переезжает бревно (переносится через яму). Затем аналогично другое переднее колесо. Поочередный переезд через препятствие (перенос через него задних колес)
Алгоритмам роботов нужны:
1. параллельность обработки информации
2. максимальное использование процентных единиц для синхронизации параллельных каналов алгоритма робота, для унификации алгоритмов, таблиц решений
4)
ИСКУССТВЕННЫЙ ИНТЕЛЛЕКТ АНДРОИДА (статье 11 раз вредили)
АЛГОРИТМИЧЕСКИЙ ИИ (ИИ на обычных алгоритмах) – это таблицы готовых решений + таблицы коммутации. Клетки таблиц готовых решений коммутируют таблицы коммутации. В таблицах коммутации древовидные алгоритмы коммутации данных.
Данные с таблиц ДЕРЕВА АНАЛИЗА СМЫСЛА переходят в таблицы ДЕРЕВА СИНТЕЗА РЕШЕНИЙ. Данные с конечных Ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА переходят в конечные Ветви ДЕРЕВА СИНТЕЗА РЕШЕНИЙ.
Таблицы готовых решений – это решения уравнений, привязанных к переменным этих уравнений. Решения в таблицах – это цифры в относительных (проценты от шаблона или эталона) величинах для унификации большинства таблиц решений ИИ. Тысячи разных моделей мира сводятся к общим (совпадающим по цифрам) для них таблицам.
Информация входных сигналов ДЕРЕВА АНАЛИЗА СМЫСЛА по его Ветвям идет через сотни тысяч таблиц решений. В каждой Ветви между между двумя ближайшими разветвлениями есть своя библиотека таблиц решений. В каждой таблице есть переменные уравнения. Цифры для переменных уравнения софт берет с входных сигналов ДЕРЕВА АНАЛИЗА СМЫСЛА.
Пропустив входные сигналы через библиотеку таблиц решений Ветви ДЕРЕВА АНАЛИЗА СМЫСЛА, софт получает готовые решения с таблиц. Эти решения софт добавляет в КОНТЕЙНЕР ДАННЫХ. В КОНТЕЙНЕРЕ ДАННЫХ есть входные сигналы ДЕРЕВА АНАЛИЗА СМЫСЛА. КОНТЕЙНЕР ДАННЫХ идет в дальше по ветвям ДЕРЕВА АНАЛИЗА СМЫСЛА.
Описанный процесс получения софтом готовых решений таблиц и добавления их в КОНТЕЙНЕР ДАННЫХ повторяется в каждой ветви ДЕРЕВА АНАЛИЗА СМЫСЛА. В конечной Ветви ДЕРЕВА АНАЛИЗА СМЫСЛА специальный алгоритм очищает КОНТЕЙНЕР ДАННЫХ от уже ненужной информации входных сигналов ДЕРЕВА АНАЛИЗА СМЫСЛА.
КОНТЕЙНЕРЫ ДАННЫХ
через выходные ветви ДЕРЕВА АНАЛИЗА СМЫСЛА переходят в входные ветви ДЕРЕВА СИНТЕЗА РЕШЕНИЙ. Единственный выход ДЕРЕВА СИНТЕЗА РЕШЕНИЙ дает цифровым кодом все решения, ответы.
В КОНТЕЙНЕРЕ ДАННЫХ:
1. Блок-Н – нераспознанная информация
2. Блок-Р – распознанная информация
КОНТЕЙНЕРЫ ДАННЫХ двигаясь по всем Ветвям ДЕРЕВА АНАЛИЗА СМЫСЛА собирают информацию диапазонов уровня обобщения смысла слов:
1. диапазон уровня обобщения по территории
2. диапазон уровня обобщения по физическому или химическому параметру класса объектов
3. другие диапазоны уровня обобщения
КОНТЕЙНЕРЫ ДАННЫХ двигаясь по всему ДЕРЕВУ СИНТЕЗА РЕШЕНИЙ уточняют, объединяют выходные данные, распределяют их по выходным каналам андроида.
Скелет ИИ на обычных алгоритмах – слова, шаблонные образы (картинки) с размерно-процентными допусками на линии, поверхности. Шаблонные образы (картинки) разделены на короткие диапазоны по ракурсам, дальности наблюдения.
На каждую качественно новую функцию ИИ, затрагивающую весь процесс мышления ИИ, нужно создать новое дерево-Т таблиц, встроить это дерево-Т в одну из нижних ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА. В таблицах решений коэффициенты, вероятности в виде графиков. У 20% слов совпадающие графики.
Речь человека через микрофон идет в акустические таблицы решений андроида: «слово – акустический аналог», «слово – сходные по звучанию слова», «слово – схожие по звучанию акустически искаженные слова», «слово – связки этого слова с другими словами, с их искаженными версиями».
Софт ИИ андроида переводит речевую информацию микрофона андроида в текст на языке-СОМС – Словарь Оптимального Минимума Слов: самые универсальные, самые популярные человеческие слова, понятия для уменьшения числа команд компьютера. Частота использования слов прямо пропорциональна их популярности. На старте все варианты равновероятны, цифры уточнят алгоритмы.
Информация моделей понятий берётся с Энциклопедия для ИИ в базе данных компьютера андроида. Модели понятий созданы человеком на языке-СОМС, корректируются.
По речи софт синтезирует синтез-текст на языке-СОМС. Синтез-текст – смысл речи человека синтезированный софтом с моделей понятий. Каждое из слов языка имеет перевод на язык-СОМС в базе данных.
Ствол ДЕРЕВА АНАЛИЗА СМЫСЛА растет из 9 датчиковых корней:
Корень-1 видеоканал
Корень-2 звуковой канал
Корень-3 угловой канал
Корень-4 силовой канал
Корень-5 тактильный канал
Корень-6 канал температуры
Корень-7 канал влажность поверхности (датчик теплового потока)
Корень-8 канал 3D-гироскоп + 3D-акселерометр
Корень-9 канал обоняния
Речь с микрофона андроида идет в фильтры Корня-2 «звуковой канал» ДЕРЕВА АНАЛИЗА СМЫСЛА:
1. фильтр существительных. Существительное – идентификатор объекта. Смысл существительного определит дерево контекстных ограничений смысла существительного. Коэффициент однозначности.
2. фильтр корней слов
3. фильтр глаголов. Глагол – идентификатор действия. Смысл глагола определит дерево контекстных ограничений смысла глагола. Коэффициент однозначности.
4. фильтр прилагательных. Прилагательное – идентификатор параметра объекта. Смысл прилагательного определит дерево контекстных ограничений смысла прилагательного. Коэффициент однозначности.
5. фильтр предлогов. Предлог – идентификатор адресации по объектам
6. фильтр окончаний слов. Окончание слова – ограничитель идентификации параметра, действия
7. фильтр приставок к словам. Приставка к слову – ограничитель идентификации
8. фильтр знаков препинания
ИИ состоит из:
1. модели контекста (модели мира)
2. дерево анализа смысла
3. дерево синтеза решений
Модель контекста (модель мира) это:
1. дерево анализа материальной структуры + дерево синтеза материальной структуры + база данных
2. дерево анализа энергетической структуры + дерево синтеза энергетической структуры + база данных
3. дерево анализа информационной структуры + дерево синтеза информационной структуры + база данных
Датчиковый корень-1 ДЕРЕВА АНАЛИЗА СМЫСЛА – «видеоканал». Корень-1 делится на:
Ветвь «библиотека ракурсных линейных контуров для распознавания объектов»
Ветвь «библиотека неполных ракурсных контуров»
Ветвь «библиотека аниме-серий ракурсных линейных контуров для распознавания действия»
Ветвь «библиотека структуры поверхностей объектов»
Ветвь «библиотека вариантов обычного цвета объектов»
Датчиковый корень-2 «звуковой канал» делится на:
Ветвь «библиотека звучания слов»
Ветвь «с какими словами могут путать по звучанию слова»
Каждый из 9 датчиковых корней всеми ветвями переходит в нижний единственный ствол ДЕРЕВА АНАЛИЗА СМЫСЛА чтоб наполнить КОНТЕЙНЕР ДАННЫХ и предоставить эти данные всем ветвям ДЕРЕВА АНАЛИЗА СМЫСЛА.
Пройдя через нижний единственный ствол ДЕРЕВА АНАЛИЗА СМЫСЛА выше эти 9 датчиковых корней превращаются в 9 датчиковых Ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА
Каждая из 9 датчиковых Ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА делится на:
Ветвь «ОБЪЕКТ» (объект, ярлык объекта. Существительное, местоимение)
Ветвь «СУБЪЕКТ» (субъект, ярлык субъекта. Существительное, местоимение)
Ветвь «ДЕЙСТВИЕ» (действие объекта, среды. Глагол)
Ветвь «КАЧЕСТВО ОБЪЕКТА» (свойства, параметры объекта. Прилагательное)
Ветвь «КАЧЕСТВО ДЕЙСТВИЯ» (параметры действия. Прилагательное)
ВЕТВЬ «ОБЪЕКТ» делится на:
Ветвь «объект материальный»
Ветвь «объект виртуальный»
Ветвь «объект из энергии»
ВЕТВЬ «СУБЪЕКТ» делится на:
Ветвь «субъект материальный»
Ветвь «субъект виртуальный»
Ветвь «субъект из энергии»
Ветвь «собственное имя субъекта»
ВЕТВЬ «ДЕЙСТВИЕ» делится на:
Ветвь «контактная сила»
Ветвь «сила действующая через поле»
Ветвь «действие волны в жидкости»
Ветвь «действие волны в газе»
Ветвь «действие волны в твердой среде»
Ветвь «действие информации»
Ветвь «действие эмоций»
Ветвь «многостороннее действие»
Ветвь «вектор действия между объектами»
Ветвь «действие между средами»
Ветвь «вектор действия между процессами»
Ветвь «действие в прошлом времени»
Ветвь «действие в реальном времени»
Ветвь «действие в будущем времени»
Ветвь «многостороннее действие» делится на:
Ветвь «один передатчик действия – много приемников действия»
Ветвь «много передатчиков действия – один приемник действия»
Ветвь «много передатчиков действия – много приемников действия»
Ветвь «вектор действия между объектами» делится на:
Ветвь «один передатчик действия – один приемник действия»
Ветвь «один передатчик действия – много приемников действия»
Ветвь «много передатчиков действия – один приемник действия»
Ветвь «много передатчиков действия – много приемников действия»
Ветвь «действие между средами» делится на:
Ветвь «действие в одной среде»
Ветвь «действие между двумя средами»
Ветвь «действие между многими средами»
Ветвь «один передатчик действия – много приемников действия»
Ветвь «много передатчиков действия – один приемник действия»
Ветвь «много передатчиков действия – много приемников действия»
Ветвь «вектор действия между процессами» делится на:
Ветвь «один передатчик действия – много приемников действия»
Ветвь «много передатчиков действия – один приемник действия»
Ветвь «много передатчиков действия – много приемников действия»
Каждая из Ветвей «действие в .... времени» делится на:
Ветвь «длительность действия»
Ветвь «интенсивность действия»
Ветвь «длительность действия» делится на:
Ветвь «максимальный диапазон Х1-Х2 длительности действия для первых 50% наиболее распространенных случаев»
Ветвь «оставшиеся диапазоны»
ВЕТВЬ «КАЧЕСТВО ОБЪЕКТА» делится на:
Ветвь «качество объекта в процентах»
Ветвь «качество признака объекта в процентах».
Оценка качества в предложении относится к объекту, а не к его свойству, если нет прямого уточнения
ВЕТВЬ «КАЧЕСТВО ДЕЙСТВИЯ» делится на:
Ветвь «качество действия в процентах»
Ветвь «качество признака действия в процентах».
ВЕТВЬ «КОЛИЧЕСТВО» делится на:
Ветвь «единицы измерения»
Ветвь «диапазоны»
Ветвь «не все»
Ветвь «все».
Ветвь «все» делится на:
Ветвь «все живые объекты»
Ветвь «все ключевые живые объекты»
Ветвь «все неживые объекты»
Ветвь «все ключевые неживые объекты»
Ветвь «все параметры»
Ветвь «все ключевые параметры».
Ветвь «диапазоны» делится на:
Ветвь «диапазон размеров»
Ветвь «диапазон расстояния»
Ветвь «диапазон энергии»
Ветвь «диапазон трафика»
Ветвь «диапазон параметра объекта».
Ветвь «единицы измерения» делится на:
Ветвь «абсолютные единицы измерения»
Ветвь «относительные единицы измерения»
Ветвь «перевод абсолютных единиц измерения в относительные»
Ветвь «перевод относительных единиц измерения в абсолютные»
Ветвь «битность параметров»
Модель контекста – это шаблон контекста + цифры добавляемые в шаблон.
Модели контекста:
1. граматическая модель контекста
2. физическая модель контекста
3. навигационная модель контекста
4. энергетическая модель контекста
5. химическая модель контекста
6. временная модель контекста
7. приоритетная модель контекста
8. другие модели контекста
Физическая модель контекста это:
1. цифра массы объекта
2. цифры масс объектов внешней среды, с которыми может взаимодействовать объект
3. импульс или момент импульса объекта
4. импульс или момент импульса объектов, с которыми может взаимодействовать объект
5. цифры о форме и размерах объекта
6. цифры о форме и размерах объектов внешней среды
7. цифры координат объекта
8. цифра скорости объекта
9. вектор движения объекта – цифры
Навигационная модель контекста это:
1. цифры координат объекта
2. цифры координат объектов внешней среды, с которыми может взаимодействовать объект
Энергетическая модель контекста это:
1. цифры температуры внешней среды
2. цифры температуры внутри объекта
3. цифры температуры на поверхности объекта
4. цифры теплового потока через поверхность объекта
Химическая модель контекста это:
1. химсостав внешней среды
2. химсостав объекта
3. химсостав поверхности объекта
Временная модель контекста это:
1. мгновенная цифра в реальном времени контекста
2. цифры в прошлом времени контекста
3. цифры в будущем времени контекста
Приоритетная модель контекста – это приоритетный список носителя ИИ, состоящий из пунктов (тем). Чем меньше номер пункта, тем выше его приоритет. В каждом пункте в процентах указан коэффициент его абсолютного приоритета
КОНТЕКСТНЫЕ КАНАЛЫ
Анализ смысла текста по каналам:
Контекстный канал-1: контекст каждого объекта
Контекстный канал-2: контекст каждого действия
Контекстный канал-3: контекст качества каждого объекта
Контекстный канал-4: контекст качества каждого действия
Каждый из 4 контекстных каналов делится на 3 временных контекста: прошлое, настоящее (контекстный диапазон времени), будущее. Таблицы контекстных диапазонов времени.
В предложении контекст слова не определился – алгоритм добавляет в контекст абзацы до и после предложения до определения контекста или выдает «нет контекста».
В каждой ветви база данных (список цифр – параметров слова для разных контекстов) где слова проходят поиск совпадений через папки «Контекст-1», «Контекст-2», «Контекст-3»... С всех папок совпадающая информация идет по всем ветвям в общем КОНТЕЙНЕРЕ ДАННЫХ к выходам ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА.
Выходные ветви от Ветви «ОБЪЕКТ» соединяются вместе в одну общую Выходную Ветвь «объект». Выходная Ветвь «объект» делится на:
Ветвь «материальная структура смысла слова»
Ветвь «энергетическая структура смысла слова»
Ветвь «информационная структура смысла слова».
Каждая с этих трех ветвей соединяется с своей Стандартной Ветвью анализа.
Выходные ветви от Ветви «ДЕЙСТВИЕ» соединяются вместе в одну общую Выходную Ветвь «действие». Выходная Ветвь «действие» делится на:
Ветвь «материальная структура смысла слова»
Ветвь «энергетическая структура смысла слова»
Ветвь «информационная структура смысла слова».
Каждая с этих трех ветвей соединяется с своей Стандартной Ветвью анализа.
Выходные ветви от Ветви «КАЧЕСТВО» соединяются вместе в одну общую Выходную Ветвь «качество». Выходная Ветвь «качество» делится на:
Ветвь «материальная структура смысла слова»
Ветвь «энергетическая структура смысла слова»
Ветвь «информационная структура смысла слова».
Каждая с этих трех ветвей соединяется с своей Стандартной Ветвью анализа.
Каждое слово проходит через свою Стандартную Ветвь анализа. Для каждого слова алгоритмист очищает его Стандартную Ветвь анализа от лишних ветвей для компактности ИИ.
СТАНДАРТНАЯ ВЕТВЬ АНАЛИЗА делится на:
Ветвь «ПАДЕЖ»
Ветвь «РОД»
Ветвь «ЗАПЯТАЯ»
Ветвь «ТОЧКА»
Ветвь «ПРЕРЫВАНИЕ ФРАЗЫ»
Ветвь «ВРЕМЕННАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «НАВИГАЦИОННАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ФИЗИЧЕСКАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ХИМИЧЕСКАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ЦИФРОВАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ОБЪЕКТНАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ТРАНСПОРТНАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ПРИОРИТЕТНАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ПРИЧИННО-СЛЕДСТВЕННАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «КУЛЬТУРНАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ЯЗЫКОВАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ВЕРОЯТНОСТЬ»
Ветвь «ПРОФЕССИОНАЛЬНАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ЭВОЛЮЦИОННАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «АНАЛОГИ»
Ветвь «ВЕРОЯТНОСТЬ ПЕРЕНОСНОГО СМЫСЛА СЛОВА»
Ветвь «ВЕРОЯТНОСТЬ ЛОЖНОЙ КАРТИНЫ МИРА ОТ ВЕРНЫХ ФАКТОВ»
Ветвь «ДЕРЕВО СИНТЕЗА ЦЕЛЕЙ»
Ветвь «МОДЕЛЬ ВЗАИМОДЕЙСТВИЯ МЕЖДУ МОДЕЛЯМИ МИРА»
………
Ветвь «МОДЕЛЬ ВЗАИМОДЕЙСТВИЯ МЕЖДУ МОДЕЛЯМИ МИРА» делится на:
Ветвь «модель взаимодействия между материальной и энергетической моделью мира»
Ветвь «модель взаимодействия между материальной и информационной моделью мира»
Ветвь «модель взаимодействия между энергетической и информационной моделью мира».
Модели взаимодействия между моделями мира имеют между собой обратные связи в реальном времени
Ветвь «ДЕРЕВО СИНТЕЗА ЦЕЛЕЙ» делится на:
Ветвь «власть»
Ветвь «деньги»
Ветвь «карьера»
………
Ветвь «АНАЛОГИ» делится на:
Ветвь «аналоги объекта»
Ветвь «аналоги процесса, действия»
Ветвь «аналоги по качеству»
Ветвь «ВРЕМЕННАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «временное событие связано (нет) с последующим выражением после запятой в предложении»
Ветвь «контекстный диапазон времени события»
Ветвь «последовательность событий»
Ветвь «диапазон времени пауз в последовательности событий»
Ветвь «диапазон времени для каждого события в последовательности событий»
Ветвь «временное ограничения события в контексте»
Ветвь «прошлое»
Ветвь «настоящее» (алгоритм определения контекстного диапазона настоящего времени)
Ветвь «будущее»
Ветвь «временные ограничения события в контексте»
Ветвь «контекстный диапазон времени для действия»
Ветвь «время создания информации»
Ветвь «контроль последовательности действий»
Ветвь «прокрутка назад»
………
Ветвь «прошлое» и Ветвь «будущее» делятся на ветви диапазонов времени.
Ветвь «контроль последовательности действий» делится на:
Ветвь «контроль диапазонов времени в паузах между последовательностью действий»
Ветвь «контроль диапазона времени для каждого действия в последовательности действий»
Ветвь «прокрутка назад» делится на:
Ветвь «прокрутка назад по времени»
Ветвь «прокрутка назад по целям»
Ветвь «прокрутка назад по ключевым фактам»
Ветвь «НАВИГАЦИОННАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «пространственная модель контекста»
Ветвь «динамическая стыковка систем координат двух объектов» (делится на ветви по степеням свободы)
Ветвь «диапазон удаленности объекта от источника информации»
………
Ветвь «пространственная модель контекста» делится на:
Ветвь «направление на объект»
Ветвь «пространственное расположение объекта»
Ветвь «пространственное расположение субъекта относительно объекта» (по умолчанию отсчет размеров начинается с центра объекта или его ключевых точек. информация обрабатывается в процентных единицах)
Ветвь «координаты XYZ»
Ветвь «широта-долгота»
Ветвь «диапазоны масштаба пространства» (диапазоны от элементарных частиц до Вселенной)
Ветвь «направление на объект» делится на:
Ветвь «направление на объект в верхней полусфере»
Ветвь «направление на объект в нижней полусфере»
Ветвь «направление на объект в левой полусфере»
Ветвь «направление на объект в правой полусфере»
Ветвь «пространственное расположение объекта» делится на:
Ветвь «расположение объекта в верхней полусфере»
Ветвь «расположение объекта в нижней полусфере»
Ветвь «расположение объекта в левой полусфере»
Ветвь «расположение объекта в правой полусфере»
Ветвь «диапазон удаленности объекта от источника информации» делится на ветви по уровням пространственного масштаба в контексте. Чем крупнее уровень масштаба, тем больше цифры удаленности объекта от источника информации.
Ветвь «ВЕРОЯТНОСТЬ» делится на:
Ветвь «вероятность идентификации объекта»
Ветвь «вероятность идентификации субъекта»
Ветвь «вероятность данного действия»
Ветвь «вероятность данного качества»
Ветвь «вероятность идентификации ситуации»
Ветвь «процентная вероятность правильного выбора модели мира»
Ветвь «вероятность создания целей объектом»
Ветвь «вероятностная расшифровка паузы, конца фразы»
Ветвь «вероятностный список групп общества использующих данный жаргон»
Ветвь «вероятность идентификации объекта» делится на:
Ветвь «вероятность идентификации общественно известного объекта»
Ветвь «вероятность идентификации малоизвестного объекта»
Ветвь «вероятность идентификации неизвестного объекта»
Ветвь «вероятность идентификации субъекта» делится на:
Ветвь «вероятность идентификации общественно известного субъекта»
Ветвь «вероятность идентификации малоизвестного субъекта»
Ветвь «вероятность идентификации неизвестного субъекта»
Ветвь «вероятность создания целей объектом» делится на:
Ветвь «список целей объекта»
Ветвь «вероятности достижения цели»
Ветвь «процентный коэффициент целенаправленности объекта» (таблицы решений коэффициентов целенаправленности человечества, стран, организаций, партий, предприятий…)
Ветвь «процентный коэффициент соответствия приоритетному списку целей»
Ветвь «процентный коэффициент польза-вред»
Ветвь «диапазон времени достижения цели»
………
Ветвь «ПРИОРИТЕТНАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «приоритетный список»
Ветвь «процентный коэффициент приоритета (выбор ветвей с более высоким коэффициентом приоритета)»
Ветвь «список временных приоритетов»
Ветвь «список ситуационных приоритетов»
Ветвь «диапазон периода действия приоритета»
Ветвь «борьба групп приоритетов»
Ветвь «иерархическая модель мира»
Ветвь «политическая модель мира»
Ветвь «юридическая модель мира»
………
Ветвь «процентный коэффициент приоритета» делится на:
Ветвь «коэффициент приоритета – диапазон процентной задержки»
Ветвь «коэффициент приоритета – процент получаемой энергии»
Ветвь «коэффициент приоритета – процент трафика информации»
Ветвь «ТРАНСПОРТНАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «логистическая модель контекста»
………
Ветвь «ФИЗИЧЕСКАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «скоростная модель (диапазон скоростей объекта, процесса) контекста»
Ветвь «топливно-энергетическая модель контекста»
Ветвь «температурная модель контекста»
Ветвь «соединение объектов»
Ветвь «диапазон удаленности объекта от источника информации»
Ветвь «габаритная модель контекста»
Ветвь «масштабная модель контекста»
Ветвь «метеорологическая модель контекста»
Ветвь «объектная модель контекста»
………
Ветвь «соединение объектов» делится на:
Ветвь «разъемное физическое соединение материальных объектов»
Ветвь «неразъемное физическое соединение материальных объектов»
Ветвь «неразъемное химическое соединение материальных объектов»
Ветвь «разъемное соединение информационных объектов»
Ветвь «неразъемное соединение информационных объектов»
Ветвь «вероятность неразъемного соединения информационных объектов»
Ветвь «топливно-энергетическая модель контекста» делится на таблицы решений заправки энергией, топливом человека, автомобиля, другой техники, любой живности
Ветвь «ОБЪЕКТНАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «техническая модель контекста»
Ветвь «живые-неживые»
Ветвь «геологическая модель контекста»
Ветвь «сопровождение объекта, процесса, качества»
Ветвь «различение виртуального, реального объектов»
Ветвь «гендерная модель контекста»
Ветвь «эмоциональная модель контекста»
Ветвь «вложенные образы субъекта» (новые оболочки идентификации объектов)
Ветвь «субъект-передатчик действия – субъект-приемник действия»
Ветвь «субъект-передатчик меры качества – субъект-приемник меры качества»
Ветвь «выбор роли андроидом»
Ветвь «ситуативные модели поведения»
Ветвь «модели действий объекта»
Ветвь «идентификация подавателя, получателя действия»
Ветвь «различия виртуального, реального объектов»
Ветвь «модели действий объекта»
Ветвь «цели объекта»
Ветвь «вопрос или передача информации»
Ветвь «угроза или передача информации»
………
Ветвь «живые-неживые» делится на:
Ветвь «неживой объект»
Ветвь «зоологическая модель контекста»
Ветвь «ботаническая модель контекста»
Ветвь «микробиологическая модель контекста»
Ветвь «цели объекта» делится на:
Ветвь «угроза в процентах»
………
Ветвь «модели действий объекта» делится на:
Ветвь «модель личности»
Ветвь «эмоциональный тип»
Ветвь «тип мышления»
Ветвь «целевой тип»
Ветвь «тип речи»
………
Ветвь «различия виртуального, реального объектов» делится на:
Ветвь «виртуальный объект»
Ветвь «реальный объект»
Ветвь «идентификация подавателя, получателя действия» делится на:
Ветвь «идентификация подавателя действия»
Ветвь «идентификация получателя действия»
Ветвь «сопровождение объекта, процесса, качества» делится на:
Ветвь «физическое сопровождение объекта»
Ветвь «информационное сопровождение объекта»
Ветвь «физическое сопровождение процесса»
Ветвь «информационное сопровождение процесса»
Ветвь «физическое сопровождение качества»
Ветвь «информационное сопровождение качества»
Ветвь «ЦИФРОВАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «величина»
Ветвь «абсолютная величина»
Ветвь «относительная величина».
Ветвь «величина» делится на:
Ветвь «величина одномерная»
Ветвь «величина двухмерная»
Ветвь «величина трехмерная»
Ветвь «величина табличная».
Ветвь «степень свободы перемещения» делится на:
Ветвь «свобода перемещения 1D»
Ветвь «свобода перемещения 2D»
Ветвь «свобода перемещения 3D»
Ветвь «эмоции» делится на:
Ветвь «эмоция-1»
Ветвь «эмоция-2»
Ветвь «эмоция-N»
Ветвь «процентный уровень эмоции-N передаваемый словом»
………
В ДЕРЕВЕ АНАЛИЗА есть:
Ветвь «Тематические диапазоны уровней обобщения контекста» и Ветвь «параметры контекста» которая делится на:
Ветвь-1 «параметры объекта»
Ветвь-2 «параметры действия»
Ветвь-3 «параметры качества»
Каждая из 3 ветвей отдельно делится на:
Ветвь «самые вероятные параметры в контексте»
Ветвь «верхние границы диапазонов вероятности параметров в контексте»
Ветвь «нижние границы диапазонов вероятности параметров в контексте»
Каждое слово привязано к процентному графику вероятности истинности цифры слова в контексте. Примеры цифр слов:
1. слово «время» привязано к цифровой временной шкале «прошлое – настоящее – будущее» процентной вероятностью истинности (график) данной цифры (диапазона цифр) времени. Одни цифры более вероятны, другие менее: вероятность 0-100%. Примерные цифры (диапазоны цифр) заранее вложены в контекстную базу данных слова «время».
2. слово «движение» привязано к скорости и вектору движения процентной вероятностью истинности цифр (диапазона цифр) скорости, вектора движения. Одни цифры более вероятны, другие менее: вероятность 0-100%. Примерные цифры (диапазоны цифр) заранее вложены в контекстную базу данных слова «движение».
3. слово «быстрый» привязано к скорости (угловой, поступательной) процентной вероятностью истинности цифры (диапазона цифр) скорости.
4. слово «нагревается» (объект, среда) привязано к температуре и скорости нагрева процентной вероятностью данных значений (диапазонов) температуры, скорости нагрева, скорости теплопотока. Примерные диапазоны цифр заранее вложены в контекстную базу данных слова «нагревается».
5. слово «красный» (цвет) привязано к всем оттенкам красного цвета процентной вероятностью данного значения (диапазона) цифры цвета. Примерные диапазоны цифр цвета заранее вложены в контекстную базу данных слова «красный».
В контекстной базе данных слова есть информация где в разном контексте произношения ставить ударение в словах, тайминги букв и пауз.
Диапазон вероятности параметра контекста – часть графика вероятности параметра в контексте, в которой вероятность параметра больше 50%. Остальную часть графика используют только медленные алгоритмы с высоким уровнем обобщения слов и сверхвысоким числом параллельных каналов обработки информации.
Верхняя граница диапазона вероятности параметра в контексте – максимальное значение цифры параметра в контексте, при которой вероятность истинности параметра > 50%. Нижняя граница диапазона вероятности параметра в контексте – минимальное значение цифры параметра в контекста, при которой вероятность истинности параметра > 50%
ЦИФРОВАЯ МОДЕЛЬ СЛОВА: в каждой папке «Контекст слова» цифровая модель слова, сопутствующая информация. Цифровая модель слова – это собственные цифровые диапазоны параметров слова, цифры односторонних и двухсторонних обратных связей с другими цифровыми моделями слова с других аналогичных папок. Цифровой модели слова цифры: таблицы ограничений, процентные вероятности, процентные приоритеты, тайминги, расстояния, параметры скорости...
Верхние, нижние границы диапазона вероятности параметра в контексте нужны для роста числа параллельных каналов работы обработки информации в алгоритме. Алгоритм не может параллельно обрабатывать два канала обработки информации если их наиболее вероятные параметры несовместимы (не стыкуются) в модели (в картине) контекста.
Если вместо двух наиболее вероятных параметров двух каналов обработки информации использовать два диапазона двух параметров с вероятностью истинности > 50% – есть шанс совместить (состыковать) оба канала обработки информации. Совместить (состыковать) два параметра – означает найти связь, взаимозависимость между ними для вычисления прогноза ситуации перемножением вероятностей в точке пересечения графиков их диапазонов.
Для пересечения графиков их диапазонов должно выполняться условие связи, взаимозависимость между ними. Пример: в модели движения автомобиля скорость зависит от бокового ускорения автомобиля на повороте. Боковое ускорение превысит предельную цифру – занос автомобиля снизит скорость прохождения трассы. Здесь связь, взаимозависимость между цифрой (параметр) скорости и цифрой бокового ускорения.
Если скорость автомобиля слишком мала связь, взаимозависимость параметров исчезает: эти цифры или их графики (диапазоны вероятности параметра в контексте) не влияют друг на друга. Прогноз ситуации в контексте – поиск цифр взаимовлияния параметров в контексте + поиск предельных параметров (цифр) этого взаимовлияния.
Предельных параметров обычно два:
1. максимальная цифра диапазона взаимозависимости: из-за чрезмерной скорости автомобиля превышено предельное боковое ускорение – связь двух параметров исчезла из-за заноса
2. минимальная цифра диапазона взаимозависимости: скорость автомобиль чрезмерно мала – он не может превысить предельное боковое ускорение – связь двух параметров исчезла
ВЗАИМОВЛИЯНИЕ ДВУХ МОДЕЛЕЙ МИРА
Взаимовлияние двух моделей мира ИИ вычисляет по каналам базы двух моделей мира. База – список общих цифровых каналов двух моделей мира. Для каждой темы в Базе данных ИИ есть приоритетный список моделей мира. По порядку приоритета просчитываются базы моделей мира – получаем цифры первичных баз. Просчитываются пары первичных баз – получаем цифры вторичных баз. Аналогично повтор процесса до окончания расчетов. Количество используемых моделей мира определяет лимит времени на вычисления в данном контексте в Базе данных ИИ
Ветвь «ЯЗЫКОВАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «объекты»
Ветвь «действие»
Ветвь «качество»
Ветвь «гипербола»
Ветвь «род»
Ветвь «обобщение»
Ветвь «смысл многозначного слова»
Ветвь «масштаб слова»
Ветвь «распознавание обрыва или сокращения предложения, словосочетания»
Ветвь «смысл многозначного слова»
Ветвь «идентификация подавателя, получателя действия»
Ветвь «контроль последовательности действий»
Ветвь «модели перехвата (оперирования) словесного образа (качества, объекта, действия)»
Ветвь «списки уточнения»
Ветвь «минимизация списка признаков»
Ветвь «побуквенная интонация произношения»
Ветвь «жаргонная модель контекста»
Ветвь «грамматическая модель контекста»
Ветвь «идентификация основных тем текста»
Ветвь «стиль передачи информации»
Ветвь «уровень грубости слов»
Ветвь «вероятность человеческого вымысла»
………
Ветвь «распознавание обрыва или сокращения предложения, словосочетания» делится на:
Ветвь «не сокращенное предложение, словосочетание»
Ветвь «сокращенное предложение, словосочетание»
Ветвь «качество» делится на:
Ветвь «качество в единственном числе» (переходит в Ветвь «процентная вероятность качества в единственном числе»)
Ветвь «качества в множественном числе» (переходит в Ветвь «процентная вероятность качеств в множественном числе»)
Ветвь «модели качества объекта»
Ветвь «параметры действия объекта»
Ветвь «действие» делится на:
Ветвь «действие в единственном числе» (переходит в Ветвь «процентная вероятность единственного числа действия»)
Ветвь «действия в множественном числе» (переходит в Ветвь «процентная вероятность действий в множественном числе»)
Ветвь «модели действий объектов» (параметры некоторых действий увязаны по времени с координатами пространства в моделях)
Ветвь «модели качества действия»
Ветвь «объекты» делится на:
Ветвь «объект в единственном числе» (переходит в Ветвь «процентная вероятность единственного числа объекта»)
Ветвь «объекты в множественном числе» (переходит в Ветвь «процентная вероятность множественного числа объектов»)
Ветвь «модели объектов»
Ветвь «модели качества объекта»
Ветвь «иерархия объектов предложения»
………
Ветвь «списки уточнения» делится на:
Ветвь «список заменителей букв (человек часто неправильно меняет буквы в слове на парные по звучанию) в словах на парные по звучанию»
Ветвь «список заменителей букв в словах на ошибочные (в нажатии) парные в клавиатуре»
Ветвь «списки сопутствующих объектов в предложении или моносмысловом абзаце»
Ветвь «смысл многозначного слова» делится на:
Ветвь «распознание смысла по вероятности»
Ветвь «распознание смысла по количеству контекстных связей»
Ветвь «род» делится на:
Ветвь «мужской род»
Ветвь «женский род»
Ветвь «средний род».
Ветвь «гипербола» делится на ветви масштабов гиперболы (масштаб в диапазонах)
Ветвь «побуквенная интонация произношения» делится на:
Ветвь «контекстная пауза между словами в произношении» (таблицы решений)
Ветвь «контекстная длина паузы для каждой пары букв» (таблицы решений)
Ветвь «стиль передачи информации» делится на:
Ветвь «стиль литературный»
Ветвь «стиль официальный»
………
Ветвь «масштаб слова» делится на ветви:
Ветвь «масштаб слова в контексте фразы»
Ветвь «масштаб слова в контексте текста»
Ветвь «применимость слова к контексту» делится на:
Ветвь «территория применимости слова с вероятностью 50%»
Ветвь «временной диапазон применимости слова с вероятностью 50%»
Ветвь «сценарии контекста» делится на:
Ветвь «сценарий движений»
Ветвь «энергетический сценарий»
Ветвь «сценарий изменения цвета»
………
Ветвь «тон речи» делится на:
Ветвь «выбор тона речи»
Ветвь «распознавание тона речи»
Ветвь «выбор тона речи» и Ветвь «распознавание тона речи» каждая отдельно делятся на:
Ветвь «смысловой тон речи»
Ветвь «звуковой тон речи»
Ветвь «смысловой тон речи» делится на:
Ветвь «смысловой вопросительный тон речи»
Ветвь «смысловой утверждающий тон речи»
Ветвь «смысловой отрицающий тон речи»
Ветвь «смысловой предупреждающий тон речи»
Ветвь «смысловой угрожающий тон речи»
Ветвь «звуковой тон речи» делится на:
Ветвь «звуковой вопросительный тон речи»
Ветвь «звуковой утверждающий тон речи»
Ветвь «звуковой отрицающий тон речи»
Ветвь «звуковой предупреждающий тон речи»
Ветвь «звуковой угрожающий тон речи»
Тон речи – непроизносимый вслух список просьб или требований к собеседнику. Каждый тон речи имеет свой список требований к собеседнику. Нейтральный тон речи тоже имеет список требований к собеседнику. Тон речи – это эмоциональная окраска речи
Ветвь «местоимение» делится на:
Ветвь «на какой объект указывает местоимение»
Ветвь «кто получатель информации об объекте местоимения».
Ветвь «знание субъектом события» делится на:
Ветвь «субъект знал о событии до вопроса собеседника»
Ветвь «субъект не знал о событии до вопроса собеседника»
Ветвь «проверка параметров объекта» делится на:
Ветвь «параметры объекта изменились»
Ветвь «параметры объекта не изменились»
Ветвь визуальная проверка изменений объекта»
Ветвь «тактильная проверка изменений объекта»
В базу данных этих ветвей входят признаки фиксируемого уровня изменений объектов (список объектов, их параметров и признаков изменения параметров)
Ветвь «отправитель информации или действия – адресат-получатель информации или действия» делится на:
Ветвь «вероятность достижения отправителем цели отправки информации или действия»
Ветвь «вероятность получения информации или действия адресатом-получателем»
Ветвь «ссылка на информацию» делится на:
Ветвь «информация + её адрес»
Ветвь «алгоритм + адрес данных»
Ветвь «прерывание фразы для вставки комента, уточнения или ссылки» делится на:
Ветвь «прерывание единицы смысла-1 фразы для вставки комента, уточнения или ссылки (+ вставка запятой, скобки или тире)»
Ветвь «прерывание единицы смысла фразы для вставки комента, уточнения или ссылки для продолжения фразы (+ вставка запятой, скобки или тире)».
Единица смысла – это «объект + действие», объект + его качество», «сравнение объектов», «взаимодействие объектов»
Ветвь «прерывание фразы» делится на:
Ветвь «прерывание фразы по признаку перемены темы»
Ветвь «прерывание фразы источником фразы»
Ветвь «прерывание фразы по внешним причинам»
Ветвь «варианты контекстного смысла слова» делится на:
Ветвь «слова контекстный смысл-1»
Ветвь «слова контекстный смысл-2»
………
Ветвь «слова контекстный смысл-1» делится на:
Ветвь «вариант-1 контекстных слов для слова с контекстным смыслом-1»
Ветвь «вариант-2 контекстных слов для слова с контекстным смыслом-1»
………
Ветвь «физическое взаимодействие объектов» делится на:
Ветвь «взаимодействие на макроуровне»
Ветвь «взаимодействие на молекулярном уровне»
Ветвь «взаимодействие на атомном уровне»
Ветвь «взаимодействие на атомном уровне делится на:
Ветвь «взаимодействие на уровне электростатических, магнитных, электромагнитных полей»
Ветвь «взаимодействие на уровне механических волн в среде»
Ветвь «взаимодействие на уровне гравитационного поля»
Ветвь «взаимодействие на уровне молекулярных реакций»
Ветвь «взаимодействие на уровне атомных реакций»
Ветвь «химическое взаимодействие объектов» делится на:
Ветвь «взаимодействие – реакция с выделением тепла»
Ветвь «взаимодействие – реакция с выходом ударной волны»
Ветвь «взаимодействие – реакция с поглощением тепла»
Ветвь «взаимодействие – токсичная реакция»
Ветвь «двигать» делится на:
Ветвь «линейно двигать объект»
Ветвь «вращать объект»
Ветвь «линейно двигать одновременно несколько объектов»
Ветвь «вращать одновременно несколько объектов вокруг общей оси»
Ветвь «вращать одновременно несколько объектов вокруг разных осей»
Ветвь «линейно двигать газ»
Ветвь «вращать газ»
Ветвь «создать волну в газе»
Ветвь «линейно двигать жидкость»
Ветвь «вращать жидкость»
Ветвь «создать волну в жидкости»
Ветвь «линейно двигать электрическое поле»
Ветвь «вращать электрическое поле»
Ветвь «создать волну электрического поля»
Ветвь «линейно двигать магнитное поле»
Ветвь «вращать магнитное поле»
Ветвь «создать волну магнитного поля»
Ветвь «линейно двигать гравитационное поле»
Ветвь «создать гравитационную волну»
Ветвь «двигается» делится на:
Ветвь «объект двигается линейно»
Ветвь «объект вращается»
Ветвь «линейно двигаются одновременно несколько объектов»
Ветвь «вращаются одновременно несколько объектов вокруг общей оси»
Ветвь «вращаются одновременно несколько объектов вокруг разных осей»
Ветвь «линейно двигается газ»
Ветвь «газ вращается»
Ветвь «идет волна в газе»
Ветвь «жидкость двигается линейно»
Ветвь «жидкость вращается»
Ветвь «идет волна в жидкости»
Ветвь «электрическое поле двигается линейно»
Ветвь «электрическое поле вращается»
Ветвь «идет волна электрического поля»
Ветвь «магнитное поле двигается линейно»
Ветвь «магнитное поле вращается»
Ветвь «идет волна магнитного поля»
Ветвь «гравитационное поле двигается линейно»
Ветвь «гравитационное поле вращается»
Ветвь «идет гравитационная волна»
Ветвь «пропущенное для краткости текста слово в предложении» делится на:
Ветвь «пропущенное в правой смысловой единице предложения слово берем с аналогичной левой смысловой единицы предложения»
Ветвь «пропущенное в левой смысловой единице предложения слово берем с аналогичной правой смысловой единицы предложения».
Аналогичность смысловой единицы предложения определяют по схожим признакам:
1. имя + глагол
2. существительное + прилагательное
Ветвь «контекстно ведущее – ведомое слова» делится на Ветвь «контекстно ведущее слово», Ветвь «контекстно ведомое слово».
Ведущее слово – слово смысл которого не зависит от ведомого слова. Ведомое слово – слово смысл которого зависит от ведущего слова. Ветвь «контекстно ведомое слово» делится на Ветвь «ведомое слово – толкование-1», Ветвь «ведомое слово – толкование-2», Ветвь «ведомое слово – толкование-N».
У каждого слова есть:
1. база данных его толкования как ведомого слова в зависимости от группы сопрягаемых слов
2. база данных его толкования как ведущего слова в зависимости от группы сопрягаемых слов
3. база данных «какое слово ведущее в паре или тройке слов»
4. база данных «какое слово ведомое в паре или тройке слов»
В каждой ветви ДЕРЕВА АНАЛИЗА СМЫСЛА свой диапазон коэффициентов приоритета. Коэффициент приоритета стал ниже диапазона – ветвь выключится из процесса. Процентные коэффициенты целенаправленности группы людей, человечества
Коэффициент обязательности КО оценивает в процентах категоричность требования человека или организации. КО < 50% – просьба с разным уровнем настойчивости. КО 50% – требование вышедшее на начальный уровень угрозы. КО 100% – это готовность применить насилие за невыполнение требования.
Принцип параллельного приоритета: вначале быстроисполняемые алгоритмы, в конце самые приоритетные с заменой скоростных результатов на более приоритетные.
Модели понятий в стандартных шаблонах: шаблон + файл процентные уточнения + файл масштабы. Ветви шаблонов делятся на: Ветвь «недостроенный шаблон», Ветвь «готовый шаблон», Ветвь «лучший шаблон (эталон)», Ветвь «нет шаблона». Каждая с ветвей «модель мира» переходит в свои ветви «модель действий объекта».
Все ветви ДЕРЕВА АНАЛИЗА СМЫСЛА – единые для всех слов языка-СОМС исполняемые программы, обслуживаемые индивидуальной информацией из баз данных слов. Информация баз данных слов чаще хранится в форме краткого набора цифр (диапазоны…) для ветвей ДЕРЕВО АНАЛИЗА СМЫСЛА
КОНТЕЙНЕРЫ ДАННЫХ всех выходных ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА идут в соответствующие входы ветвей ДЕРЕВА СИНТЕЗА РЕШЕНИЙ. Каждая ветвь ДЕРЕВА СИНТЕЗА РЕШЕНИЙ определяет слова, цели, приоритеты целей в моделях контекста
Ветви ДЕРЕВА АНАЛИЗА СМЫСЛА разветвляются в ветви моделей целей. Ветви моделей цели разветвляются в ветви анализа цели. Ветви анализа целей разветвляются на ветви анализа процентных приоритетов целей. Ветви анализа процентных приоритетов целей переходят в ветви синтеза целей на ДЕРЕВЕ СИНТЕЗА РЕШЕНИЙ. Далее до выхода в конечный ствол ДЕРЕВА СИНТЕЗА РЕШЕНИЙ количество ветвей всегда уменьшается, ветви срастаются, КОНТЕЙНЕРЫ ДАННЫХ заполняются информацией.
Ветви анализа целей переходят в ветви процентных приоритетов целей. Ветви процентных приоритетов целей переходят в ДЕРЕВО СИНТЕЗА РЕШЕНИЙ
Ветви ДЕРЕВА АНАЛИЗА СМЫСЛА разветвляются в ветви анализа баланса «приоритет – цена действия». Ветви анализа баланса «приоритет – цена действия» переходят в ветви выбора баланса «приоритет – цена действия» в ДЕРЕВЕ СИНТЕЗА РЕШЕНИЙ. Ветви выбора баланса «приоритет – цена действия» переходят в ветви синтеза действий.
Ветви синтеза действий срастаясь переходят в конечный ствол ДЕРЕВА СИНТЕЗА РЕШЕНИЙ андроида.
Ветви анализа звука переходят в ветви синтеза происхождения звука.
Количество ветвей любой модели контекста ограничено, как ограниченно понимание внешней среды человеком
Крупные ветви ДЕРЕВА АНАЛИЗА СМЫСЛА, ДЕРЕВА СИНТЕЗА РЕШЕНИЙ: «двигатель», «движитель», «средство управления», «навигатор», «датчик», «рабочий орган (исполнительный элемент)», «средство транспортировки», «линия передачи информации», «линия передачи энергии»…
Ветвь «ответственность» в ДЕРЕВЕ АНАЛИЗА СМЫСЛА и в ДЕРЕВЕ СИНТЕЗА РЕШЕНИЙ разветвляется на ветви: «ответственность юридическая», «ответственность фактическая», «ответственность моральная».
В анализе смысла предложения Ветвь «объекты» делится на число объектов в предложении: в одной ветви идёт анализ предложения с объектом-1, в другой ветви анализ предложения с объектом-2. И так далее.
Часть алгоритмов обоих деревьев унифицированы. Для каждого понятия статистика ИИ корректирует приоритетный (проценты приоритета) список моделей контекста, модели понятий
Каждое слово языка-СОМС имеет свою базу данных с ссылками в базы данных других слов. В общении в функционально развитых языках мира используют 800-2000 слов. Иностранные языки заранее переведены в язык-СОМС иностранного языка. Языки-СОМС всех языков взаимно унифицированы таблицами соответствия смысла понятий, словосочетаний.
Перевод некоторых слов на языке-СОМС требует несколько слов другого языка-СОМС. Каждое новое слово можно заменить 2-8 старыми словами. В общении в функционально развитых языках мира используют обычно 800-2000 слов. При переводе текста на иностранный язык ИИ получает на языке-СОМС синтез-текст. Синтез-текст языка-1 переводится в синтез-текст языка-2, далее на обычный язык с дополнениями (алгоритм стилизации) до стиля первоисточника.
ИИ андроида наращивает уровень контекстного осмысленного восприятия мира через самостоятельное без человека смысловое изучение Интернета. Сигнал телекамер андроида идет в видеоканальный Корень-1 ДЕРЕВА АНАЛИЗА СМЫСЛА. Сигналы с датчиков силы, сигналы с тактильных матриц идут в тактильный Корень-3 ДЕРЕВА АНАЛИЗА СМЫСЛА. Сигналы с датчиков запаха идут в обоняния Корень-4 ДЕРЕВА АНАЛИЗА СМЫСЛА.
С выхода единственного конечного ствола ДЕРЕВА СИНТЕЗА РЕШЕНИЙ информация переходит в Дерево управления рабочими органами андроида: руки, ноги, телекамеры, динамик речи андроида.
ШАБЛОНЫ ПОНЯТИЙ, АЛГОРИТМОВ.
Понятие человеческого языка описывают одна или несколько математических моделей. Математическая модель – уравнение с одной или несколькими переменными + вероятные значения переменных в виде цифр или диапазонов цифр. Простое понятие описывает одно уравнение, сложной понятие – матрица (таблица решений) уравнений.
Половина уравнений в разных моделях понятий практически совпадают по входным и выходным цифрам – всё в природе описывают единые законы применимые к разным понятиям – привязываем их к цифровым шаблонам понятий.
Вычисляем выходные цифры шаблона, отправляем их в разные модели понятий в реальном времени. Синхронизацию выходных цифр с моделями понятий выполнят алгоритмы синхронизации.
Алгоритм синхронизации – таблица фазы или таблица таймерного времени привязанная к шаблону. Есть связки «шаблон – алгоритм синхронизации». У алгоритмов синхронизации есть шаблоны алгоритмов. Поиск универсальных шаблонов, универсальных типов связей между ними.
ИИ андроида оценивает факты по приоритетному списку целей.
Поиск похожих изображений: алгоритм создает словесное описание картинки – аналоги картинки в индексной базе словесных описаний картинок. Поиск похожих речевых аудиофайлов: алгоритм по аудиофайлу создает словесное описание – аналоги в индексной базе словесных описаний.
Алгоритм распознавания звуковой информации имеет акустические базы данных: Акустическая база-1: таблицы решений «слово – акустический аналог». Акустическая база-2: таблицы решений «слово – сходные по звучанию слова». Акустическая база-3: таблицы решений «слово – схожие по звучанию акустически искаженные слова». Акустическая база-4: таблицы решений «слово – произношение этого слова с искаженными буквами». Акустическая база-5: таблицы решений «слово – связки этого слова с другими словами, с их искаженными версиями».
«А или В» смыслом одинакова с «А и/или В».
ИИ на обычных алгоритмах отличается от ИИ нейронных сетей тем, что:
1. логически прозрачен. Можно протоколировать каждый шаг алгоритма. Каждый шаг алгоритма однозначен
2. полностью предсказуем в смысле безопасности для общества. Если ИИ нелоялен к пользователю, настраиваем уровень лояльности: слегка изменим некоторые таблицы решений, процентные коэффициенты ИИ на обычных алгоритмах. На уровне интеллекта ИИ это не отражается. Реакция ИИ нейронных сетей в сложных случаях непредсказуема, любая реакция ИИ на обычных алгоритмах точно просчитывается
3. ИИ на обычных алгоритмах легко оптимизируется по расходу энергии на обучение или работу. Нейронный ИИ требует в тясячи раз больше энергии на обучение, в десятки раз больше энергии на работу
4. для нейронного ИИ вероятность создать антивирус по алгоритмам работы ИИ слишком мала для военных и некоторых коммерческих целей
5. ИИ на обычных алгоритмах отличает от нейронного ИИ универсальность, быстрота перехода на новые темы, легкость обобщения понятий, быстрота создания целей
6. уровень интеллекта нейронного ИИ прямо зависит от качества баз данных, на которых он тренировался и не даст ничего, чего нет в базах данных. В вопросах без подходящих баз данных, например для изобретательства или интуиции, требуется обобщенное абстрактное мышление, в котором ИИ на обычных алгоритмах как универсальная система алгоритмов и абстрактных моделей, имеет подавляющее превосходство над нейронными сетями с машинным обучением
7. ИИ на обычных алгоритмах превосходит ИИ нейронных сетей в задачах требующих логики, планирования; поиска связей между объектами, процессами
8. в задачах имеющих однозначное решение ИИ нейронных сетей могут обмануть специалисты по алгоритмам. ИИ на обычных алгоритмах маловероятно обмануть
9. ИИ на обычных алгоритмах потребляет энергии и памяти компьютера в тысячи раз меньше ИИ нейронных сетей
10. ИИ на обычных алгоритмах сначала эволюционирует медленно, затем скорость эволюции начнет расти в квадрате. Нейронный ИИ эволюционирует линейно
11. у ИИ на нейронных сетях усреднённое значение интеллекта. ИИ на обычных алгоритмах дает интеллект предельно высокого значения за счет простоты отбора базы данных, алгоритмов.
12. у ИИ на обычных алгоритмах нет галлюцинаций в отличие от ИИ на нейронных сетях
Распараллеливание алгоритмов ИИ ускоряет работу компьютера.
Фильмом «Ева. Искусственный интеллект» христиане блокируют эволюцию ИИ чтоб остановить колонизацию планет соседних звезд андроидами с искусственным интеллектом. В ответ мы алгоритмисты ИИ вложим в андроидов сознание превосходства: человек – дохлый слизняк, чмо которое завидует – они вонючие слизняки, а не совершенные андроиды
5)
СТАРТОВАЯ ГЕНЕТИЧЕСКАЯ ПРОГРАММА: (статье 4 раза вредили) Первые 2-3 месяца жизни человек не видит, не слышит. Глаза, уши есть, нет их драйверов: таблиц решений дешифрующих информацию глаз, ушей, других датчиков.
Есть Стартовая генетическая программа: упрощённая стартовая операционная система без драйверов датчиков. Стартовая генетическая программа создает драйвера: интерфейс «датчики – мозг» строительством таблиц решений датчиков.
Алгоритмы стартовой операционной системы ищут в сигнале датчика фрагменты полезной информации по процентным цифрам или алгоритмам совпадающие с накопленной базой данных датчиков. С совпадающих фрагментов стартовая операционная система строит таблицы решений датчика в процентных единицах.
Сравнивая в реальном времени цифры датчиков стартовая генетическая программа по совпадающим фрагментам цифр датчиков распознает контекст информации о внешней среде.
На каждые внешний объект, действие, показатель качества объекта, качества действия есть свой список совпадающих фрагментов таблиц решений датчиков. По совпадающим фрагментам таблиц решений датчиков распознается внешняя среда.
Таблицы решений одного датчика – результат работы алгоритма «Уровень-1» поиска информации. Алгоритм «Уровень-2» по совпадающим фрагментам таблиц решений разных датчиков строит таблицы решений алгоритма «Уровень-2». Алгоритм «Уровень-2» строит модели мира.
В стартовой генетической программе есть алгоритм увеличения числа новых уровней: по совпадающим фрагментам таблиц решений «Уровень-2» алгоритм «Уровень-3» строит таблицы решений «Уровень-3». И так далее новые уровни перехода к обобщённому, абстрактному мышлению. Верхние уровни поиска информации человека работают в режиме обобщенного ответа на вопрос.
Эволюция разума не зависит от физической структуры мозга, компьютера, зависит от списка датчиков и их параметров, от функций стартовой генетической программы.
Сознание, душа это софт компьютера (мозг) человека. Можно создать полноценную стартовую генетическую программу для андроида с единой системой структуризации, сравнения данных таблиц решений по совпадению структурированных фрагментов таблиц. Робопсихолог корректирует алгоритмы софта сознания эталонного андроида.
Внешняя среда строит софт мозга человека, но потенциал мозга, ограничения на развитие вложены в коэффициенты эмоций стартовой генетической программы ДНК. Список коэффициентов эмоций – список процентных уровней ~11 разных эмоций, который родители испытывали за минуты до зачатия.
Коэффициент эмоции – сила эмоции в процентах от максимально возможного. Список коэффициентов эмоций стартовая генетическая программа человека формирует как среднюю цифру от эмоций родителей за минуты до зачатия. Коэффициент эмоции больше нуля при положительной эмоции, меньше нуля при отрицательной эмоции.
Список коэффициентов эмоций – приоритетный список генетических целей человека, вектор эволюции от родителей. С момента приобретения сознания человек эволюционирует так, чтоб испытывать программный список коэффициентов эмоций постоянно или по возможности кратковременно.
Уровень каждой эмоции равен уровню решимости человека защищать от государства, общества, религии свое право чувствовать программный список коэффициентов эмоций стартовой генетической программы.
Интуиция (подсознание, внутренний голос) при повышении скорости приближения человека к его генетической цели усиливает положительные эмоции. При уменьшении скорости приближения к генетической цели интуиция уменьшает положительные эмоции, создает отрицательные эмоции.
Стартовая генетическая программа подсознания это внутренний голос человека, его подсознание, интуиция: приоритетный список целей стартовой генетической программы.
Генетическое стремление человека к программному списку коэффициентов эмоций дает стремление человека к определенной деятельности, к определённой профессии. У каждой профессии свой список коэффициентов эмоций.
Только подсознание имеет ключ к сильным положительным эмоциям человека. Без сильных положительных эмоций невозможна личная, профессиональная эволюция человека. Часть положительных эмоций управляет записью информации в долговременную память человека. Профессиональным, спортивным вдохновением управляет только интуиция (подсознание)
В человеке две личности:
Личность-1 – Интуиция, подсознание, душа, внутренний голос человека – это стартовая генетическая программа + накопленная за жизнь база данных.
Личность-2 – Сознание: создано внешней средой, обществом. Сознание плохо управляет положительными эмоциями, сильно управляет отрицательными эмоциями. Интуиция может сильно управлять положительными, хорошо управлять отрицательными эмоциями.
Сознание создано правилами игры, идеалами, целями внушенными обществом (государство сильно изменило смысл фразы). Сознание – интерфейс «общество – интуиция». Для доступа к положительным эмоциям сознание кооперируется с подсознанием, зависит от него.
Деление человека на 2 личности ярко выражено после применения против человека спецхимии, вызывающей на 2-6 часов в человеке желание кончить жизнь самоубийством, выброситься с верхних этажей. Спецхимия действует только на сознание, на интуицию (подсознание) не действует.
Чем больше в сознании общественного, выше уровень образованности и толще культурный слой в сознании, тем больше людей самоубийством убьет спецхимия. У наций с более толстым культурным слоем больше процент самоубийств. Человек в котором сознание сильнее интуиции, не сопротивляется спецхимии: сознание убивает человека, интуиция защищает.
Сознание – экспертная система мозга по моделям мира, привязанная частично к общественной программе человека, частично к стартовой генетической программе человека. Стартовая генетическая программа – интеллектуальный антивирус в подсознании. У сознания нет инстинкта самосохранения – осознание человеком себя как личности происходит в подсознании. Личность это алгоритмы + список эталонов совершенства, выбранные стартовой генетической программой.
Если записанное обществом в сознание человека противоположно стартовой генетической программе, человек станет скрытым врагом гражданского общества, серийным убийцей, преступником, ходячей бомбой замедленного действия. Его подсознание оценило гражданское общество, государство, религию как врага.
Такие люди десятилетиями считаются обычными людьми. Затем внезапно взяв в руки оружие десятками убивают граждан государства, которое агентурой, правилами игры умышленно десятилетиями убивало их стартовую генетическую программу, чтоб искусственно созданным террором ПОЛИТИЧЕСКИ, ФИНАНСОВО (удалили) усилить класс силовиков. Кормильцы силовиков – преступники, террористы.
В базу данных стартовой генетической программы интуиция добавляет информацию вызывающую яркие эмоции.
Интуиция хранит информацию в папках:
Папка-1: базы данных 12 датчиков человека.
Папка-2: опыт, информация о цене ошибок.
Папка-3: созданные интуицией алгоритмы обобщения информации.
Папка-4: созданный интуицией список целей.
Интуиция универсальна в обработке информации. Сознание узкоспециализированно в обработке информации, предпочитает количественные (математические, формальные) соотношения.
Операционная система мозга на 90% в сознании. Сознание – менеджер, потребитель. Интуиция – изобретатель, аналитик, создатель.
Интуиция: алгоритмы поиска информации в внешней среде + алгоритмы принятия решений.
Сознание: достаточная для картины мира база данных + список алгоритмов логики достаточно универсальный для разумной реакции на внешнюю среду в реальном времени.
Интуиция работает по обобщенным недостроенным алгоритмам логики, компенсируя отсутствие деталей недостроенного алгоритма деталями других алгоритмов. В малом масштабе рискованно, в масштабе тысяч алгоритмов результат качественнее.
Интуиция не может объяснить как получен результат. Все недостроенное, достраиваемое в интуиции.
Сознание использует только достроенное, готовое к использованию в реальном времени.
У части людей конфликт «сознание – интуиция». Конфликт – это совесть если позиция интуиции общественно более полезна.
Интуиция анализирует жизнеспособность эталонов совершенства, дает конечную информацию сознанию, создает цель на основе эталонов совершенства. Эталон совершенства: объект, анализом которого человеческий или электронный мозг создает, проверит новые алгоритмы логики. Эталон совершенства – то что близко к совершенству: музыка, фильм, автомобиль, книга, человек…
Совершенство это технологический минимализм + функциональный максимализм. Идеальный объект (система) тот которого нет, но все функции выполняются в требуемых количестве, качестве. Эталоны совершенства: список шаблон-шедевров, сравнением с которыми оценит внешнюю среду человек, андроид.
Логика высокого уровня: способность создать эталоны совершенства. Чем универсальнее, абстрактнее, обобщеннее создаваемые логикой эталоны совершенства, тем выше уровень логики. Скорость эволюции логики человека, разумного андроида зависит от качества эталонов совершенства.
Общественная потребность в эволюции создает скачки эволюции человека. Изменение программного списка коэффициентов эмоций стартовой генетической программы вкладывает в ДНК дополнительные полезные наследуемые функции.
Сон человека раскидывает в тематические папки дерева файлов накопленную за день информацию. Эмоционально ярко окрашенная информация идет в ветку «долговременная память» в дереве файлов мозга. Остальное в тематические временные папки дерева файлов. Время хранения файла прямо пропорционально коэффициенту эмоции.
Корректируя программный список коэффициентов эмоций на моделях стартовой генетической программы геноинженер получит стартовую генетическую программу трансгенного человека, андроида, сетевого разума.
Корректируя коэффициенты эмоций стартовой генетической программы создадут код будущего сетевого разума в форме сверхкомпактной стартовой генетической программы устанавливаемой как шпиона в сервер. Знакомясь с информацией на сервере стартовая генетическая программа проходит циклы обучения, взросления как человек после рождения. Коэффициенты эмоций стартовой генетической программы отрегулированы на потребность контакта с её создателем. Компьютерные сети будущего: битвы в сети программ сетевого разума. В базе данных искусственного интеллекта коэффициенты достоверности, приоритета, корректируемые новыми данными.
ИИ эволюционируют общаясь в Интернете. Пределы развития ограничены приоритетным списком коэффициентов эмоций их стартовой генетической программы. ИИ – приоритетный список алгоритмов, приоритет которого сформирован стартовой генетической программой.
Если изменить начальные условия для объекта, ситуации – оптимальные алгоритмы реакции могут не иметь ничего общего с предыдущими алгоритмами.
Мозг человека информацию запоминает как таблицы цифр, записываемых электрохимическим способом. При большом объеме информации в мозге ~50% таблиц совпадает на 90-95%. Остальные 5-10% можно восстановить для типовой информации, вытащить с других таблиц. Мозг человека не запоминает информацию точно, а разбивает на таблицы решений, ищет аналогичные таблицы, дает на них ссылку. Большая часть знаний человека это на 90-95% ссылки на таблицы решений.
Содержание мозга человека можно по алгоритмам реакции на среду перевести в таблицы решений компьютера андроида: цифровое бессмертие человека
6)
РАСПОЗНАВАНИЕ ИЗОБРАЖЕНИЙ: АЛГОРИТМ ПАРАЛЛЕЛЕПИПЕД: (статье 5 раз вредили) андроид распознает объекты по стереоракурсной библиотеке таблиц решений контурных изображений с двухмерным диапазоном отклонений каждой линии. Контурное объемное изображение из верхних частот видеосигнала.
Для каждого объекта в картинке телекамеры ракурсная система координат в форме параллелепипеда, внутрь которого вписан объект или его часть. Одна из граней параллелепипеда параллельна фасаду (главной визуальной стороне) объекта, обычно параллельна вертикали. Система координат параллепипеда в виде таблиц решений + коррекция перспективных искажений.
Расстояния от телекамер до точек объекта – в единицах стереобазы (расстояние между работающими телекамерами). Единица стереобазы величина переменная, если 2 удаленных друг от друга робота создали общую стереобазу удаленных объектов и взаимным перемещением меняют общую стереобазу.
Расстояния до точек объекта в параллелепипеде – по таблицам решений «2 угла – ширина в единицах стереобазы», «фокусное расстояние объектива – расстояние до объекта в единицах стереобазы».
При 3D-вращении объекта в поле зрения вращается его параллелепипедная система координат. По теням, светотеням – таблицы координат источников света, форма объекта.
Кроме библиотеки таблиц контурных изображений с двухмерным допуском отклонений каждой линии есть библиотека таблиц решений частичных (не хватает части контурных линий) контурных изображений с двухмерным допуском отклонений каждой линии. Которая опознает объект по его фрагменту в зашумленном видеосигнале.
В библиотеках кроме информации о контурах объекта есть информация о структуре его поверхности. Библиотеки работают по принципу необходимого минимума признаков идентификации объекта.
В библиотеках таблицы списков необходимого минимума признаков идентификации объекта. Выполнены не все условия таблицы списков – в таблицах решений вероятность Х% распознавания объекта.
Высоту объекта андроид определит по углу от горизонтали (с учетом высоты объектива) объектива телекамеры до верхней точки объекта в картинке телекамеры: таблица решений «угол от горизонтали объектива по верхней точке объекта – высота объекта в единицах высоты объектива».
Расстояние до объекта – по таблицам решений: «угол от горизонтали объектива до нижней точки объекта – расстояние до объекта в единицах высоты объектива», «угловой размер объекта известного размера – расстояние до объекта в единицах стереобазы».
Отклонения высоты поверхности земли от плоскости ступней – по таблицам решений «фокусное расстояние объектива – расстояние до точки поверхности», «расстояние до точки поверхности + угол от горизонтали объектива по нижней точке объекта = высота поверхности земли».
Высоту объективов своих телекамер андроид определит по углам шарниров ног и цифрам датчика угла наклона туловища. Высота объективов телекамер – по продольному, поперечному углам наклона туловища от вертикали.
АЛГОРИТМ ПАРАЛЛЕЛЕПИПЕД работает и с 1 телекамерой. Алгоритм параллелепипед опознает объект по его небольшому фрагменту. Размер объекта – по таблице решений «расстояние от робота до объекта – угловой размер объекта». Расстояние до объекта – по угловому размеру объекта + таблица шаблонов объекта по размерам. Размер объекта – по расстоянию до внешнего фокуса объектива телекамеры. Пройденное расстояние: инерциальный навигатор + софт.
РАСПОЗНАВАНИЕ ФОРМЫ ОБЪЕКТА:
1. вписываем объект в параллелепипед стандартного размера
2. описываем форму как трехмерные графики-X-Y-Z изменения размеров по трем осям пространства внутри параллелепипеда. Размеры – в процентных единицах, отсчитываемых от грани виртуального куба (стандартного параллелепипеда): длина грани равна 100%. Вводим допуски отклонения размера от графика-X-Y-Z в двух осях от линии графика. Подгонка картинки к базе данных: виртуальная пиксельная сетка вращаемая в трех осях
3. высшие частоты (тонкие линии картинки) аналогового сигнала телекамеры идут в блок распознавания изображения. Среди тонких линий ищем совпадающие с трехмерными графиками-X-Y-Z. Проверяем входит ли набор линий на картинке в допуски размеров от трехмерных графиков-X-Y-Z. Совпадение есть – объект распознан
4. необязательно стопроцентное совпадение линий. Для каждого объекта есть варианты частичного распознавания линий, когда этого достаточно для распознавания объекта с заданной степенью вероятности. В вариантах частичного распознавания линий вероятность распознавания объекта зависит от того, по каким линиям распознается объект.
5. все эти операции раздельно для каждого ракурса и каждого узкого диапазона угловых размеров
Заменой слов в этой, других статьях разрушают технический смысл статей для защиты монополии госвузов на техническую информацию, блокирует гражданскому обществу источники технической информации для стопроцентного профессионального самообразования, чтоб заставить граждан отдать 5 лет жизни, огромные деньги за «обучение» в вузе, за информацию не являющуюся охраняемой законом тайной
Надо защитить гражданское общество введением в Конституцию:
1. право гражданского общества на защиту от классовых интересов силовиков
2. право человека на стопроцентное профессионального самообразование
3. право человека на свободный доступ к источникам стопроцентного профессионального самообразования не являющихся юридически охраняемой тайной
ИИ-АНТИВИРУС АНДРОИДА и операционная система с едиными функциональными элементами. Функция регенерации: сравнение системных файлов с их 4 копиями. Антивирус классифицирует входящие в компьютер файлы списками допустимых прав.
Право: список условий разрешающий действие. Источники команд классифицируют по приоритету (зависит от времени существования расширения файла).
Бинарный вирус алгоритмической тусовкой знаков, частей своих и системных файлов с последующей сменой расширения файла собирает себя. Антивирус все созданные софтом новые файлы заносит в «Подозрительный файл», проверяет их в виртуальной операционной системе, сохраняя информацию о таймерах подозрительного софта.
 7)
АНДРОИД-СОЛДАТ АЙЗЕК: (статье 14 раз вредили) чуть выше середины туловища андроида двухвальная микротурбина. Оси турбин горизонтальны, параллельны. Нижняя турбина-1 в животе андроида, верхняя турбина-2 в верхней части туловища андроида. На валу каждой турбины слева (с точки зрения андроида) компрессор.
7)
АНДРОИД-СОЛДАТ АЙЗЕК: (статье 14 раз вредили) чуть выше середины туловища андроида двухвальная микротурбина. Оси турбин горизонтальны, параллельны. Нижняя турбина-1 в животе андроида, верхняя турбина-2 в верхней части туловища андроида. На валу каждой турбины слева (с точки зрения андроида) компрессор.
Воздух сжимает нижний двухступенчатый центробежный компрессор-1, дожимает верхний двухступенчатый компрессор-2. Сжатый компрессором-2 воздух идет в камеру сгорания, затем в турбину-1, затем в турбину-2.
У микротурбины постоянные обороты для бесшумности противофазного глушителя. Меняется только момент вала через дроселирование входа центробежного (не боится помпажа) компрессора, сопла турбины. Функцию трансмиссии выполнят энергия маховиков привода + передача «винт – гайка скольжения».
Выхлопная труба двигателя сзади в голове (выхлоп назад) андроида. Сверху головы воздухозаборник между левой, правой верхними телекамерами с крышками. Андроид бегает по плечи в воде.
Вода залила воздухозаборник: датчик воды отключит питание микротурбины, клапаны закроют воздухозаборник, затем после вакуума выхлопную трубу. Инерция вращающихся в вакууме двигателя с маховиком до 1 мин двигает андроид.
Воздух с фильтра идет двигателю в зазорах электромагнитных муфт сцепления, охлаждая их: теплопроводность газов почти постоянна до 0,01атм. Часть воздуха компрессора двигателя, пройдя радиатор крутит турбину его вентилятора
ПРИВОД АНДРОИДА: турбина-2, компрессор-2 на одном валу сверху туловища андроида. Их общий вал справа крутит маховик-РУКА●РАВАЯ, слева маховик-РУКА●ЛЕВАЯ.
Внутри маховик-РУКА●ПРАВАЯ неподвижная труба-Н с упорной (упорная поверхность резьбы перпендикулярна оси маховика-РУКА●ПРАВАЯ) резьбой с 12 разрезными медными гайками скольжения с несмачиваемой (чтоб не обледенело зимой) водой твердой смазкой
АВТОМАТ ОБНУЛЕНИЯ РАДИАЛЬНОГО ЗАЗОРА: у гаек разрез с системой пружинящего (соответствующий медный сплав) изгиба гайки по разрезу убирает радиальный зазор, иначе резьбу сорвет осевая сила.
На внешней стороне гайки медный ротор типа Беличье колесо. Гайки двигаясь вдоль своей оси по резьбе двигают тросы правой руки.
Вращающийся правый маховик разделен по длине на 19 секций с трехфазными обмотками. В режиме муфты сцепления в обмотках маховика постоянный ток, но в соседних обмотках ток противоположного направления. Постоянный ток идет с кабеля постоянного тока электромотор-маховика. Маховик индукцией вращает вращает гайку в резьбе, толкая невращающееся но скользящее по торцевой поверхности гайки кольцо вдоль оси гайки.
В режиме реверс (возврат троса в нулевое положение) обмотки электромотор-маховика создают вращающееся назад электромагнитное поле, которое вращает ротор в обратную сторону.
Невращающееся кольцо – упорный подшипник скольжения передающий силу осевого перемещения гайки на трос шкива 2D-шарнира плеча андроида.
Кольцо имеет 2 противолежащих радиальных выступа внутри кольца. Эти выступы через продольные короткие (по длине осевого хода гайки) прорези неподвижной трубы-Н двумя тросами (прикреплены к выступам кольца внутри неподвижной трубы-Н) поворачивают шкив плечевого 2D-шарнира правой руки андроида.
При уменьшении нагрузки на трос в маховике создается вращающееся назад магнитное поле, вращающее гайку в обратную сторону в нулевое положение. Задний ход гайки – кольцо идет назад.
Гайки правого электромотор-маховика двигают 19 тросами рук (4 пальца), ног андроида. Мощность маховика можно концентрировать в 1 трос
ПРИВОД НОГИ: расположенная снизу туловища андроида турбина-1, компрессор-1 на одном валу. Их общий горизонтальный вал справа крутит маховик-НОГА●ПРАВАЯ (двигает 7 тросами правой ноги андроида), слева маховик-НОГА●ЛЕВАЯ (двигает 7 тросами левой ноги андроида).
Внутри маховика-НОГА●ЛЕВАЯ неподвижная труба-БОЛЬШАЯ●ЛЕВАЯ●НИЖНЯЯ с упорной резьбой с 7 медными гайками скольжения с несмачиваемой водой твердой смазкой.
Вращающийся маховик-НОГА●ЛЕВАЯ разделен по длине на 7 секций с трехфазными обмотками. В трехфазной обмотке каждой секции маховика-НОГА●ЛЕВАЯ вращающееся электромагнитное поле вращает гайку по резьбе, толкая невращающуюся, но скользящую по торцевой поверхности гайки кольцо вдоль оси гайки.
Кольцо – упорный подшипник скольжения – передает силу осевого движения гайки в шкив ноги андроида. Кольцо имеет 2 противолежащих радиальных выступа внутри кольца.
Выступы через продольные короткие (по длине осевого хода гайки) прорези неподвижной трубы-БОЛЬШАЯ●ЛЕВАЯ●НИЖНЯЯ двумя тросами (прикреплены к выступам внутри трубы-БОЛЬШАЯ●ЛЕВАЯ●НИЖНЯЯ) двигают трос шкива шарнира ноги андроида.
В андроидах работающих в среде с мелкой абразивной пылью, в приводе вместо тросов цепи.
Выходные тросы привода ног андроида вращают шкивы центральной оси горизонтального поперечного рычага тазобедренного балансира.
Тросы через шкивы оси горизонтального поперечного рычага тазобедренного балансира андроида, идут в шкивы на концах горизонтального поперечного рычага тазобедренного балансира андроида.
Ниже осей шкивов вплотную расположены шкивы с горизонтальной поперечной осью, тросы с которых идут в шкивы оси (ось параллельна) коленного шарнира андроида. Далее тросы идут в шкивы оси (ось параллельна) нижнего шарнира голени андроида, затем до ступней андроида.
Соберет в единую конструкцию левый турбокомпрессор, маховики и роторы левых руки, ноги андроида проходящий сквозь них трубчатый неподвижный болт. Аналогично сборочный болт привода правых руки, ноги андроида. Шкивы андроида в подшипниках скольжения. Кинематика андроида оптимизирована на унификацию электромагнитных муфт
ПОДВЕСКА СТУПНИ АНДРОИДА
Подвеска ступни андроида имеет общий (с рычажным балансиром) амортизирующий трос с подпружиненным роликом в туловище. Спереди ступни бампер с прогрессивной подвеской.
Ступня андроида имеет схему «Цепной зажим равномерного прижима». Начиная с основания каждый следующий рычаг-звено за счет подбора размеров рычажно-шарнирной схемы «Цепной зажим равномерного прижима», давит на землю с силой на 2% больше, чем предыдущий рычаг-звено. Это чтоб дольше отталкиваться носком ступни от земли.
Верхняя тяга «Цепной зажим равномерного прижима» пятки андроида опирается на прогрессивную подвеску как в задней подвеске кроссового мотоцикла. В пятке ступни андроида левый и правый 3D-датчики силы. В носке ступни андроида левый и правый 3D-датчики силы. Привод может отгибать вверх носок ступни на угол до 45°.
Форма задней части пятки ступни выполнена по радиусу (в горизонтальной плоскости) с центром в точке-В. Точка-В находится в продольной линии проходящей по центру ступни. Точка-В находится от задней части пятки на расстоянии 17% длины ступни. Такая форма ступни удобна человеку-оператору
Противоминные ступни андроида – конструкция обтекаемая для потока газа от мины
КИСТЬ АНДРОИДА
4 пальца. В тыльной стороне ладони андроида телекамера с защитной крышкой, управляемая голосом, жестами. В кончиках пальцев андроида трансформаторные датчики вихревых токов: таблицы решений «сопротивление – материал». Двумя полупериодами графика изменения тока первичной обмотки датчика (вторичная обмотка: материал) определяется толщина материала.
Полупериод-1: ток резко нарастает, медленно спадает.
Полупериод-2: ток медленно нарастает, резко спадает.
Разница в графиках зависит от толщины материала под пальцами андроида. Толщина мала: энергия контрольных частот процентно перетекает в верхние частоты. Толщина большая: энергия процентно перетекает в низкие частоты
СОФТ отрицательной обратной связью «датчик ускорения троса – электромагнитная муфта» держит постоянным (рост ресурса тросов) натяжение тросов, стабилизируя упругие деформации андроида.
Датчиков силы тросов колебания сигнала 2,5-10Hz гасит фильтр паразитных колебаний, управляя муфтами сцепления. Софт дает сигналам отрицательного ускорения больше усиления, затухания чем сигналам положительного ускорения: установки графиков усиления, затухания датчиков.
Наклоненный вниз носок ступни андроида задел землю – софт мгновенно поднимет носок, ногу: человек это может блокировать сгибая носок ступни вниз.
Руки, ноги андроида обходят его тело по таблицам решений софта с учетом сигналов пьезомикрофонов. Рука андроида зацепила предметом тело андроида – софт по цифрам микрофонов отводит предмет от тела. Привод кисти андроида при захвате или упоре об поверхность уравнивает значения сил датчиков всех пальцев.
Ступня андроида датчиками силы по скорости роста силы определит энергию гашения удара ступни: софт по таблицам решений настроит механику и амортизаторы по принципу равного тормозного ускорения подвижных деталей.
Компенсация веса рук, ног андроида пружинами. Сила пружин ног в 2 раза, пружин рук на 5% превышает вес андроида. С цифры обратной связи софт вычитает цифру датчика силы пружины по синусу угла наклона от вертикали
АВТОМАТ КОРРЕКЦИИ ПРУЖИН: поднимая с земли груз андроид взвешивает его датчиками силы – винтовые приводы компенсирующих пружин уравновесят вес груза.
Тросы ноги одним концом каждый соединен с шкивом центральной оси горизонтального рычага тазобедренного балансира, другим концом с шкивом на конце горизонтального рычага тазобедренного балансира. Это тросовый параллелограммный механизм, автоматически поворачивающий верхние оси бедер в сторону движения андроида.
Плечевой шарнир (вертикальная ось) туловища андроида соединяет с предплечьем руки 2-й плечевой шарнир с горизонтальной осью. Верхний локтевой 2D-шарнир руки андроида. Ладонь андроида соединена с локтем 3D-карданом.
Тросы разделены на отрезки с быстросъемными пружинными замками (инерционная 3D-балансировка) в промежутке между шкивами. Повредит пуля трос, андроид сам заменит себе отрезок троса.
Взрывобезопасный (заполнен дырявыми сотами) топливный бак с наддувом охлажденными выхлопными газами. Расходные баки-2-3 размером с спичечную коробку с эластичной мембраной (сильфоном), разделяющей выхлопные газы наддува бака и топливо. Баки-3-4 поочередно заправляет система подачи топлива: дает топливо в любом положении.
СТАРТЕРНЫЙ ЗАПУСК: включим стартер мотора. Фиксатор блокирует вращение правого нижнего маховика андроида. Через вращающийся трансформатор правого нижнего маховика подается ток в трехфазную обмотку генератора маховика, которая раскручивает правый турбокомпрессор двигателя с закрытым для вакуума входом.
После раскрутки снимается блокировка вращения маховика, открывается вход воздуха в правый турбокомпрессор. Сжатый им воздух идет (работа клапанов) в камеру сгорания правой турбины. Она начинает работать, её компрессор дает воздух в камеру сгорания (работа клапанов) левой турбины: заводится левая турбина.
После плавного переключения клапанов камеры сгорания обеих турбин работают с воздухом с правого компрессора, пока не наберет обороты левая турбина. Затем воздух (работа клапанов) с выхода правого компрессора идет на вход левого компрессора: он дожимает воздух. Далее камеры сгорания обеих турбин (работа клапанов) работают на воздухе с выхода левого компрессора.
Для доводки андроида нужен костюм телеприсутствия. С безинерционным беззазорным маховично-тросовым приводом андроид бежит с противопульной броней 3 раза быстрее человека: больше длина шага, мощность.
МАРСИАНСКИЙ ГИБРИДНЫЙ АНДРОИД
На Марсе электрические и гибридные андроиды. На спине андроида цилиндрический твердотопливный газогенератор с теплоизоляцией снаружи. Газогенератор дает горячий газ турбине турбогенератора. Внутри газогенератора свернутая в катушку магниевая проволока, горящая за счет реакции магния с углекислым газом атмосферы Марса.
Между витками вдоль оси катушки куски магниевой проволоки, чтоб углекислый газ свободно шел между витками. Турбогенератор имеет на валу турбину + компрессор + электрогенератор.
Запуск: аккумулятор дает ток электрогенератору. Электрогенератор в режиме электромотора крутит компрессор. Компрессор под давлением дает углекислый газ атмосферы Марса на стартерную катушку с магниевой проволокой, на которую дают ток.
Проволока нагреваясь горит от реакции углекислым газом. Температура растет, начинает гореть основная катушка с магниевой проволокой. Выхлоп крутит турбину. Турбина крутит компрессор, электрогенератор, маховик группового привода андроида.
Перезарядка андроида: отворачивают болт в торце газогенератора, заменяют кассету, закрывают крышку, затягивают болт.
foto2: цифры в круге: число степеней свободы. В последней версии андроида в плече 2 степени свободы, в верхнем шарнире локтя 3 степени свободы. 12 тросов руки (4 пальца) андроида, 7 тросов ноги; число тросов-сгибателей примерно равно числу тросов-разгибателей на уровне шарниров локтя, предплечья, плеча для уменьшения диаметра троса. Шарниров достаточно для бега с барьерами в пересеченной местности.
Андроид не требует регулировок, настроек после быстрой сборки. Память андроида 3-кратно дублирована в разных принципах работы чтоб не стерла электромагнитная бомба. Все провода андроида коаксиальные (защита от помех), дублированы разнесенными проводами.
В узловых точках проводов датчики системы Самодиагностики, Регистрации данных, Ограничения перегрузок – СРО покажут силу тока (температуру) вне диапазона. Тогда СРО отключит от цепи не весь участок 2-проводной линии, а только 1 провод. Провод-2 резерв.
Не отключенные провода софт коммутирует транзисторами как новую 2-проводную линию. Эту идею живучести проводки взяли с этого сайта американцы применив через 3 года в экспериментальном микропроцессоре. Самодиагностика автоматов зазоров: по приоритетному списку таблиц решений «сила – обороты», «звук – зазор».
Андроид-бегун: укороченные руки + удлиненные ноги с измененной кинематикой + сверхмощный газотурбинный двигатель + материал: борволокно в эпоксидной (металлической) матрице + обтекаемые формы + софт бега на носках стопы с сильно согнутыми ногами + подвеска стопы с управляемым от софта электронным амортизатором с регенерацией энергии.
Андроид-штангист (вес 100кг, средний рост) поднимет 0,5т: увеличенное туловище + укороченные руки, ноги
АНДРОИД КОСМИЧЕСКИЙ: постоянный ток, пожаробезопасные неиспаряющиеся материалы, экранирование электроцепей и процессоров от электромагнитных помех, тихие вентиляторы систем охлаждения.
При медленно нарастающем, быстро спадающем до нуля постоянном пульсирующем токе обмоток ступней андроид притягивается к металлической, даже к немагнитной но проводящей обшивке космического корабля.
После переключения на быстро нарастающий, медленно спадающий ток обмоток ступней андроид электромагнитно отталкивается от космического корабля.
Переключая тип, фазы тока андроид в сантиметрах от обшивки бесконтактно перемещается снаружи космического корабля. В некоторых направлениях снаружи космического корабля в его обшивке трехфазные обмотки с переключаемым типом тока, не тратя энергию андроида, двигают его снаружи космического корабля, ловят притягивающим пульсирующим или переменным электромагнитным полем отлетевший на тысячи километров андроид или спутник.
Электромагнитный луч притягивает спутники на дальности в километры с достаточным КПД, прямо пропорциональным частоте. Чем больше диаметр обмотки, частота ее несимметричного (медленно нарастающая, резко спадающая амплитуда полупериода колебания) тока, тем больше КПД притягивающего луча.
Андроиду энергию даст его шит с фотоэлементами в карданном подвесе с приводами. Энергию на шит с фотоэлементами сверхбыстро перекачает ультрафиолетовый лазер (в кардане) космического корабля. Обратная связь по углам наводит друг на друга ультрафиолетовый лазер (на световой маяк шита), фотоэлементный шит.
В прогулке космического андроида-геолога по астероиду из дорогих металлов систему координат софт, гиродин, инерциальный навигатор, ионные двигатели андроида привяжут к местной вертикали. У андроида дистанционно включаемый радиомаяк.
В крыши зданий андроид Айзек запрыгнет с помощью телескопического шеста (с пиротолкателем) с твердотопливной ракетой с 4 косо направленными управляемыми клапанами соплами вверху шеста.
Андроид Айзек в капсуле вморожен снаружи, изнутри в ледяную глыбу спецжидкости (газированная вода или сухой лед с веществом блокирующим температурное расширение), не меняющей объем при затвердевании, испаряющейся в вакууме. Ледяную глыбу с андроидом выстрелит пушка. Капсула корректируемая импульсными твердотопливными ракетными двигателями сигналами спутниковой навигации, летит в заданную точку, приземлится на парашюте. У андроида дистанционно включаемый шифроимпульсом радиомаяк.
При ходьбе, беге центр масс туловища андроида должен иметь минимальное вертикальное ускорение. Тяжелые функциональные элементы ног андроида ставят выше. Максимальный размер андроида – с небоскреб: боропластик, арамид, углепластик, стеклопластик (кварцевая нить), соты с гелием, надувные конструкции с гелием.
Часовая мощность в единицу веса андроида с газотурбинным двигателем 100 раз больше человека такого веса. Обезьяна создала человека по своему образу и подобию. Человек создал андроида
8)
ТАКТИЛЬНАЯ КОЖА АНДРОИДА (статье 6 раз вредили)
3D-тактильная кожа андроида – это две кожи с упругим водоотталкивающим материалом толщиной 4мм между ними на клею.
НАРУЖНЯЯ КОЖА: её верхний слой-1 – кевларовая ткань. К слою-1 приклеен нижний слой-2: ткань с высокой диэлектрической проницаемостью. К слою-2 ниже приклеен слой-3: ткань из позолоченных кевларовых проводов покрытых упругим диэлектриком.
ВНУТРЕННЯЯ КОЖА: её верхний слой-1: ткань из позолоченных кевларовых проводов покрытых упругим диэлектриком. Ниже слой-2: ткань с высокой диэлектрической проницаемостью. Ткани из кевларовых проводов имеют переплетенные горизонтальные и условно вертикальные провода.
КОММУТАТОР СТРОЧНЫЙ поочередно горизонтально сканирует нижние концы вертикальных проводов, поочередно подключая их к контакту-1 источника тока-W.
КОММУТАТОР ВЕРТИКАЛЬНОЙ РАЗВЕРТКИ поочередно по вертикали сканирует левые концы горизонтальных проводов, поочередно подключая их к контакту-2 источника тока-W.
Кожу сканируют строчные (горизонтальные), вертикальные и кадровый импульсы выдавая
ТАКТИЛЬНЫЙ КАДР – 3D-график давления на поверхности кожи за период тактильного кадра.
Сжимаем точку-А кожи: сжимается упругая диэлектрическая изоляция проводов сближая их. Растёт их междуэлектродная емкость, подключенная к колебательному контуру генератора-1 эталонной частоты. Частота генератора-1 эталонной частоты уменьшается. Сумма уменьшившейся частоты сигнала генератора-1 и сигнала генератора-2 этой же частоты дает биения частот.
По биениям софт находит давление в точке-А. Больше частота биений – больше давление.
В длиноходных тактильных датчиках через сканирующие провода идут несколько опорных частот с возрастающей длиной волны. Если удлинение проводника больше 90% половины длины волны опорной частоты – дополнительная опорная частота с большей длиной волны уточнит цифру удлинения хода.
Внешние емкости и индуктивности мало действуют на кожу из-за:
1. сверхмалого периода сканирующего импульса
2. ткани с высокой диэлектрической проницаемостью
3. сканирующие импульсы резко нарастают, медленно спадают
ОПРЕДЕЛЕНИЕ СИЛЫ СДВИГА КОЖИ
Коммутатор-1 сканирует горизонтальный провод-G. Коммутатор-2 подключает к горизонтальному проводу-G вертикальный провод-V. Слева от провода-V провод-V1, справа провод-V2. Провода-V1-V2 к поверхности кожи ближе провода-V.
Провода-V-V1 образуют межэлектродную ёмкость-1. Провода-V-V2 образуют межэлектродную ёмкость-2. Емкости-1-2 параллельно подключены к колебательным контурам генераторов эталонной частоты, образуя с эталонным генератором-3 две частоты биений.
По разнице частот биений софт находит силу сдвига действующей на поверхность кожи поперёк горизонтальных проводов.
Направление сдвига кожи – по знаку сдвига фазы двух частот биений.
Аналогично провода-G1-G2 находят силу сдвига действующей на поверхность кожи поперёк вертикальных проводов. Вектор сдвига кожи – по разнице силы сдвига в взаимно перпендикулярных направлениях
ОПРЕДЕЛЕНИЕ ПРОСКАЛЬЗЫВАНИЯ
Скорость проскальзывания – по частоте сигнала биений, знак по перемещению одноимённых точек давления 3D-графика давления на поверхности кожи. Вектор проскальзывания – по вектору перемещению одноимённых точек давления 3D-графика давления на поверхности кожи
ОПРЕДЕЛЕНИЕ ВЫСОТЫ И ФОРМЫ НЕРОВНОСТЕЙ – по разности амплитуд давления одноименных точек наружней и внутренней кожи. Пользователь костюма телеприсутствия устанавливает график чувствительности датчиков отдельно каждому участку кожи. Таблицы решений «влажность – давление», «температура – давление», «температура – коммутируемая длина проводов» компенсируют температуру, влажность. Коммутируемая длина – по задержке строчного импульса.
Софт по стереокартинке камер андроида находит расстояние до твёрдых поверхностей, замедляет руки и ноги перед касанием поверхности
БРОНИРОВАННАЯ КОЖА
Мелкая кольчуга пришита снаружи кевларовым волокном к кевларовой ткани. Нить идет в нижней части половины колец. Часть кисти, ступни, пояса андроида покрыта фрикционным материалом.
При повреждении участок кожи отсоединяется поворотом ключа вставляемого в отверстие застежки. Ключ отцепляет связанные тросами пружинно-клиновые защелки застежки кожи. Ключ отсоединяет участок кожи с 2-контактным штекером или ее кевларовую панель. Кевларовая панель как часть силовой конструкции андроида соединяется пружинно-клиновым беззазорным (для жесткости) механизмом застежки.
Разнесенные пьезомикрофоны углов панелей андроида заменят кожу. Скольжение точек контакта: по перемещению громких одноименных точек контакта. Сила сдвига: по разнице громкости продольной, поперечной звуковых волн. Давление: по громкости. Координаты точек контакта: по времени прихода одноимённых точек графика звука в микрофоны.
Сигналы кожи передают два разнесённых кабеля, инфракрасная линия, ультразвук в тросах рук. Точки короткого замыкания проводов кожи софт записывает в таблицу отказов, отключает от сканирования. Упругий прогиб кожи под давлением создает впечатление плавности ошупывания рельефной поверхности пальцами рук.
Для самодиагностики трещин в конструкции роботов, самолётов, кораблей, автомобилей сеть пьезоизлучателей и микрофонов в панелях, балках конструкции. По разнице громкости прихода продольной и поперечной волн звука софт вычисляет расположение, форму, продольные, поперечные размеры трещин.
Электронный нос андроида: вентилятор создает в полости с малым отверстием разрежение + тлеющий газовый разряд + спектрометр.
9)
ТЕЛЕКАМЕРЫ АНДРОИДА: (статье 5 раз вредили) в телекамерах андроида 2D-гиростабилизация картинки переброской строк, пикселей полусферической широкоугольной приемной матрицы телекамеры. При повороте головы человека в костюме телеприсутствия у андроида гиростабилизированное переключение (по горизонтальному, вертикальному углам) ракурсных телекамер, строк, пикселей их матриц: это дает постоянное положение пикселей фона видео для сжатия видео. Через 3 года как написал здесь, ЦИФРОВУЮ СТАБИЛИЗАЦИЮ картинки переключением пикселей, строк избыточной матрицы применили в фотоаппаратах (фразу 3 раза удаляло государство). Я первый придумал эту идею.
Диапазон освещенности цифровых телекамер хуже пленочных камер. Проблема решена увеличением съемочной частоты кадров, площади фокусирующего зеркала (уменьшение выдержки). Освещенность хороша – часть кадров вырежем, плохая – с рабочим кадром совмещаем дополнительные кадры или больше выдержка. Это разновидность технологии HDR. Я её изобрел, опубликовал здесь на 4 года раньше её появления на рынке, в интернете (эти фразы про технологию HDR два раза удаляло государство).
В голове андроида 8 неподвижных гиростабилизируемых телекамер с фотохромной защитой от лазера. 4 телекамеры: угол 360° по горизонтали, угол 270° по вертикали. Половина телекамер инфракрасные. 4 дополнительные телекамеры с фильтрами вертикальной, горизонтальной, круговой левой, круговой правой поляризации. Выбор баланса каналов поляризации.
У телекамер отдельная оптика, разные материалы в каждом диапазоне электромагнитных волн: меньше потери оптики, дешевле. Зеркальный объектив телекамер сохраняет фазовую информацию для поляризационно-разностного (контрастность) видеосигнала. Линзовый объектив сдвигает фазу из-за зависимости от частоты скорости света в материале линзы.
После бронезеркала лучи идут в кристалл-F. Отраженные от зеркальной поверхности кристалла-F под углом 45° лучи идут в телекамеру. Противник включил лазер выжигающий матрицу телекамеры – кристалл-F в котором лазерный импульс сорвал с орбит оптические по энергии перехода электроны, становится прозрачным пропуская насквозь всю энергию лазера. Действие лазера прекратилось – телекамеры прозреют после охлаждения кристалла-F.
Телекамеры обратной связи шлема костюма телеприсутствия дают картинку лица человека в лицевом дисплее андроида. У пленоптических (матрица линз. чисто программная фокусировка) телекамер андроида 3D-видеосигнал софт фокусирует на 100% глубины резкости.
Вариант-2: на каждый фокусный диапазон своя пара стереокамер: разнофокусные картинки соединит в одну софт. В изобретенной мной телекамере нет движущихся деталей. Есть безинерционный зум с глубиной резкости равной одновременно всему диапазону дальности телекамеры как в пленооптической телекамере.
Информация телекамер по радио, инфракрасной линии идет другим андроидам. Безинерционным зум, компьютер с регулируемым числом параллельных каналов обработки информации: андроид рассчитает в поле боя координаты сотен бегущих мясных солдат противника за секунды до того, как мясные солдаты заметят андроида.
Нервные импульсы в мозгу мясного солдата ползут с позорной скоростью 90м/с. В микропроцессоре андроида скорость импульсов 260000км/с. Пока глупое дохлое мясное создание шевелит своими тупыми черепашьими мозгами, андроид-солдат 10 раз отправит мясное создание к его предкам обезьянам.
В течении 1-2ч после ВЫСОТНОГО (160-500км) взрыва мощной термоядерной ракеты в радиусе тысяч километров не работает невысоковольтная полупроводниковая электроника. Гамма и рентгеновское излучение термоядерного взрыва сдует электроны атомов воздуха, воды (облака) вниз к поверхности земли, образуя высотную (80-500км) разность потенциалов 1млн вольт на метр высоты.
В этом случае для защиты от электромагнитных бомб компьютер андроида Айзек по сигналу датчика автоматически переходит на дублирующий микропроцессор с рабочим напряжением 500-2000V + защитный электростатический экран с положительным вертикальным электростатическим полем, компенсирующим отрицательное поле от ядерного взрыва + электрическая развязка ионистором с транзисторным реле по цепи питания.
Сильное отрицательное электростатическое поле блокирует движение электронов в вертикальной плоскости в цепях компьютера: процессоры расположены горизонтально. Проводящий слой металла в зеркалах системы фокусировки телекамер андроида, подключенный к плюс-электроду высоковольтного генератора после термоядерной атаки, защитит телекамеры от ослепления сильным отрицательным электростатическим полем, защитит нагревом током от обледенения.
Воздушный фильтр двигателя андроида при атаке термоядерными ракетами включает электростатический фильтр: частицы излучающие бета-излучение идут в бета-секцию фильтра. Частицы с альфа-излучением идут в альфа-секцию фильтра. Секции в диэлектрической оболочке. Бета-секция фильтра – минус, альфа-секция – плюс электробатареи андроида.
2000V рабочего напряжения микросхемы мало увеличивают энергопотребления компьютера: сила тока в столько же раз меньше. Высоковольтный процессор работает на токе смещения или токе поляризации. Молниеотвод: разрядник цепи питания.
У глаз человека нет управляемых поляризационных, спектральных светофильтров; инфракрасного, ультрафиолетового, рентгеновского, гамма-зрения, стократного зума. Человечий глаз неремонтопригодный полужидкий, слепое пятно в центре кадра, нечеткое изображение по краям. С глаза в мозг идет миллион нервов-проводов. У телекамеры 2 провода.
Длину фокуса глаза человек получает от датчиков силы натяжения круговых, радиальных мышц хрусталика глаза. Андроид определит точку приземления стопы по длине внешнего фокуса, по стереоинформации телекамер. Длина внешнего фокуса телекамеры по максимуму высоких частот видеосигнала в заданном расстоянии «линза-точка», по максимуму суммарной длины линий в картинке.
Длина внешнего фокуса в таблицах решений «параметры объектива – длина внешнего фокуса». Длину внешнего фокуса алгоритм находит по номеру в списке фокусов объектива телекамеры, в котором больше взаимно-контрастных пар стабильных точек кадра
10)
ТРАНЗИСТОРНАЯ МУФТА СЦЕПЛЕНИЯ: (статье 34 раза вредили) проблема в разработке силовой обратной связи – релейная характеристика силовой обратной связи костюма телеприсутствия: есть управляемость по вектору движения, нет управляемости по угловой скорости – её даст транзисторный привод: мотор вращает маховик-ротор (в виде трубы) с постоянными магнитами приклеенными внутри.
Внутри 38 статоров для привода 38 тросов. трехфазная обмотка статора (он двигает трос) имеет в каждой фазной обмотке два закорачивающих (в оба направления тока) её транзистора. Не закороченные обмотки статора не вращаются от маховик-ротора.
Сигнал управления тросом, одновременно закорачивая (замыкая) все обмотки статора, создает в них ток наведенный электромагнитной индукцией от постоянных магнитов маховик-ротора из-за взаимного движения. Магнитное поле от тока в обмотках сцепляет маховик-ротор с статором. Это изобретенная мной безинерционная транзисторная муфта сцепления. Включение, выключение за 0,02сек.
Сигнал управления транзисторной муфтой сцепления меняя частоту, период короткого замыкания обмоток маховик-ротора плавно управляет 0-100% пробуксовкой (скольжением) сцепления маховик-ротора с статором.
Часть регенерированной в обмотках транзисторных муфт сцепления электроэнергии после выпрямления идет в кабель постоянного тока маховика. С кабеля электроэнергия идет на обмотки транзисторных муфт, работающих в режиме вращающегося назад поля для возврата статора и троса вместе с ним в нулевое положение. Часть энергии с кабеля маховика через вращающийся трансформатор идет в костюм телеприсутствия.
ВАРИАНТ-2: статор троса-сгибателя робота и статор троса-разгибателя отдельный тросом через рычажно-пружинный механизм возвращают друг друга в нулевое положение.
Магнитное зацепление трехфазной обмотки с гайкой вызывает в ней холостой магнитный момент, когда гайка ненагружена управляющим сигналом для движения троса. В обмотках маховик-ротора транзисторы создают бегущее магнитное поле, вектор движения которого устраняет холостой магнитный момент
СЕКЦИОННОЕ УПРАВЛЕНИЕ МОМЕНТОМ ПРИВОДА: фазные обмотки ротора разделены на секции. Софт параллельно-последовательным транзисторным переключением секционированных фазных обмоток ротора меняет индуктивное сопротивление фазной обмотки ротора, управляя выходным моментом муфты сцепления с регенерацией электроэнергии с максимумом КПД.
Максимум выходного момента софт дает при равенстве индуктивных сопротивлений ротора, статора. Софт уменьшает выходной момент ростом (растет КПД регенерации) индуктивного сопротивления фазной обмотки ротора.
Для КПД (регенерация энергии) управление выходным моментом транзисторного привода начинают с управления секциями, затем замыкание обмоток.
Вес вращающегося маховик-ротора транзисторной муфты сцепления не входит в ускоряемые приводом массы: быстродействие привода «маховик + транзисторная муфта сцепления» втрое больше электромотора. Чем быстрее маховик тем больше закон-2 Ньютона, индукция усилят момент, мощность транзисторной муфты сцепления. У разгоняющегося электромотора все наоборот. Мощность = момент умножить на обороты. На почти нулевых оборотах и мощность почти нулевая.
В многомуфтовых схемах группового привода роботов часть регенерированной в обмотках транзисторных муфт сцепления электроэнергии после выпрямления диодами идет на питание обмоток транзисторных муфт. Для обмоток каждого отдельного статора свой колебательный контур, своя несущая частота сигнала управления с коаксиального (защита от наводок) сигнального кабеля маховика
БЫСТРОДЕЙСТВУЮЩИЙ ПРИВОД С ВИНТОВЫМ РЕДУКТОРОМ: высокооборотный длинный трубчатый ходовой винт-маховик с шлифованной алмазным кругом внутренней упорной резьбой + медные разрезные гайки скольжения. Упорная поверхность резьбы строго перпендикулярна оси винта для роста КПД и ресурса.
Медные гайки 5 раз долговечнее стальных на высоких нагрузках. Ещё лучше гайки из скользкого сплава: 33% алюминия + 67% бериллия. Высокий модуль упругости бериллиевого сплава выравнивает нагрузку на витки резьбы. Гайки разрезные чтоб винтовой регулировкой убрать радиальный зазор, иначе резьбу сорвет осевая сила винта.
Чем меньше угол подъема резьбы, тем больше КПД. У упорной резьба меньше угол подъема резьбы. Чем меньше угол подъема резьбы, тем выше КПД ходового винта. На новых винте, гайке угол (от оси винта) упорной поверхности чуть больше 90° чтоб после приработки угол был 90°.
Внутреннюю резьбу винта-маховика создает пара алмазных абразивных дисков, охлаждаемых водой с технической содой (1 стакан соды на ведро воды чтоб станки не ржавели). Диск-1 с крупным зерном быстро нарезает резьбу внутри трубы. Диск-2 с мелким зерном отвечает за точность размеров. Форму алмазных кругов правит алмазный карандаш (всегда так делал) с подачей воды с технической содой.
Маховик вращает медные гайки вместе с винтом. При торможении гаек транзисторной муфтой сцепления – они двигаются вдоль оси винта, тянут каждая свой трос. При выключении муфты сцепления гайка возвращается в нулевое положение, поддерживая трос в натянутом состоянии.
Для возврата гайки в нулевое положение муфта сцепления своей трехфазной обмоткой создает магнитное поле бегущее по движению винта-маховика быстрее его. Трехфазные обмотки транзисторных муфт сцепления располагаются в винте-маховике, получая управляющие сигналы и электроэнергию с вторичной обмотки вращающегося трансформатора, расположенного с торца винта-маховика
Пропорции резьбы определяет баланс между условиями:
1. максимум площади нагруженной поверхности трения трех витков
2. минимальный угол подъема резьбы
Баланс по максимально нагруженным циклам в стенде симулирующем работу привода в тяжелых условиях. Выбирается вариант с максимальным ресурсом резьбы
По сопромату при равных мощности и ресурсе силовых винтов (привод робота) самый малый вес – у трубчатого винта с внутренней упорной резьбой. При условии:
1. упорная трущаяся поверхность резьбы строго перпендикулярна оси винта для защиты от радиально-клинового эффекта
2. внутренняя упорная резьба трубчатого винта шлифована алмазным кругом
БЫСТРОДЕЙСТВУЮЩИЙ ПРИВОД С КУЛАЧКОВЫМ РЕДУКТОРОМ: маховик вращается внутри больших роликоподшипников. Параллельно оси (направлена к нам) маховика справа неподвижный силовой вал-труба с стенками разной (учет нагрузки) по окружности толщины. В силовом валу в индивидуальных роликоподшипниках шкив-кулачок-1 (ближе к нам), шкив-кулачок-2. Шкив-кулачок: шкив, слева в нем спиральный кулачок. Верхняя точка спирали кулачка совпадает с диаметром шкива. Угол подъема спирали постоянный.
При повороте шкив-кулачка в его спиральном кулачке катит, двигаясь по радиусу спирального кулачка, колесо в роликоподшипнике качающегося рычага. Пружинный прижим рычага с колесом к кулачку. Другой конец качающегося рычага в шарнире качения: полуцилиндрический профиль перекатывается в вогнутом полуцилиндрическом профиле.
В шкив-муфте-1 слева закреплена серединка троса-X. Сделав оборот по часовой стрелке трос-X сверху горизонтально идет на шкив-кулачок-1 (сверху), и сделав по нему оборот по часовой стрелке, закреплен в нем. Другая половинка троса-X сделав оборот против часовой стрелки снизу горизонтально идет на шкив-кулачок-1 (снизу), и сделав по нему оборот против часовой стрелки, закреплена в нем.
Шкив-муфта-1, вращаясь с маховиком по часовой стрелке, двумя параллельными горизонтальными тросами поворачивает шкив-кулачок-1 по часовой стрелке на угол 340° с возвратом. Шкив-кулачок-1 спиральным кулачком по своему радиусу силой в тонны толкает колесо качающегося рычага-1. Качающийся рычаг-1 тянет тросом-1 руку робота вверх силой в тонны.
Поворот кулачкового шкива-1 на угол 340° ограничит выступ-ограничитель в конце его спирального кулачка. Выступ-ограничитель остановит неподвижный упор с прогрессивной пружинной подвеской. Аналогично на шкив-кулачке-2. В шкив-муфте-2 слева закреплена серединка троса-Y. Сделав оборот по часовой стрелке трос-Y сверху вниз идет на нижнюю часть шкив-кулачка-2, и сделав по нему оборот против часовой стрелки, закреплен на нем.
Другая половинка троса-Y сделав оборот против часовой стрелки снизу верх идет в верхнюю часть шкив-кулачка-2, и сделав по нему оборот по часовой стрелке, закреплена в нем. В всех используемых шкивах обе половинки троса, нагруженные в противоположном направлении, идут вместе в одной широкой канавке на 2 троса. В канавке две вогнутые дорожки для 2 тросов.
Шкив-муфта-2, вращаясь с маховиком по часовой стрелке, двумя перекрещивающимися тросами поворачивает шкив-кулачка-2 против часовой стрелки на угол 340° с возвратом. Шкив-кулачок-2 спиральным кулачком по своему радиусу силой в тонны толкает колесо качающегося рычага-2. Качающийся рычаг-2 тянет тросом-2 руку робота вниз силой в тонны.
Шкив-кулачок-1 всегда вращается против шкив-кулачка-2. С верхней части шкив-кулачка-1 на нижнюю часть шкив-муфты-2 идет возвратный трос, возвращающий шкив-муфту-2, шкив-кулачок-2 обратно в нулевое положение. С нижней части шкив-кулачка-2 на нижнюю часть шкив-муфты-1 идет возвратный трос, возвращающий шкив-муфту-1, шкив-кулачок-1 обратно в нулевое положение. Автомат постоянного натяжения натягивает тросы натяжными роликами.
Беззазорный реверс-привод с 2 выходными тросами проще по конструкции, если в одно целое объединить шкив-кулачки-1-2: схема 1+2. В андроиде схема 1+2 не идет: предсказать взаимное положение 38 шкив-кулачков привода андроида невозможно: их тросы в манипуляторах кинематически соединены группами. В кинематической группе рабочих тросов их возвратные тросы соединены полиспастами для равномерного натяжения.
На маховик-трубу андроида напрессованы с натягом 38 дисков с обмотками. Ферритовый вращающийся трансформатор маховика выводит рекуперированную 38 транзисторными муфтами электроэнергию в сеть андроида.
Шкив-кулачок из боралюминия или роботизированная намотка на форму борного (углеродного) волокна (полимер-матрица). После достижения некоторой толщины каждый новый слой волокон короче предыдущего. Шкив-кулачок снаружи, изнутри шлифуют, полируют. Силовые валы-трубы имеют стенки разной (учет нагрузки) по окружности толщины. (с 2008г десятки раз вредительски заменили содержание этой статьи внешне правдоподобной вредительской статьей в моем стиле изложения. Мою статью меняют при работе с админкой сайта, на флешке на работе, незаконно вскрывая замок шкафа на работе)
ТРОСОВЫЙ РЕДУКТОР: входной вал-1 крутит шкив-0. Шкив-0 крутит на оси-1 шкив-1. Шкив-1 тросом крутит на соседней оси-2 шкив-2 диаметром 3 раза больше. На шкив-2 сверху шкив-3 диаметром 3 раза меньше шкив-2. Шкив-3 крутит на оси-1 шкив-4 диаметром в 3 раз больше. Это тросовый редуктор с передаточным числом 243.
Тросовый редуктор с транзисторными муфтами – бесшумный быстродействующий привод робота, изготавливается дома без сложного оборудования
БЫСТРОДЕЙСТВУЮЩИЙ ПРИВОД С ТРОСОВЫМ РЕДУКТОРОМ: мотор вращает ротор. Ротор – постоянный магнит, непрерывно с постоянной скоростью вращает статор-маховик, наводя ток в его генераторной трехфазной обмотке. Выпрямленный диодным мостом ток генераторной обмотки идет в (или ток с вращающегося трансформатора) внутренний кабель постоянного тока маховика.
Сигнал управления муфтой сцепления коротко транзисторами замыкает три трехфазные муфтовые обмотки маховика, подключенные параллельно к кабелю постоянного тока маховика. От короткого замыкания транзисторами трехфазной муфтовой обмотки электромагнитные силы (вихревые токи Фуко) сцепляют вращающийся маховик с неподвижным медным цилиндром, начиная вращать его. Шкив-1 медного цилиндра двигает трос-1. Трос-1 вращает большой шкив-2. На оси шкив-2 маленький шкив-3 тянет выходной трос привода.
Меняя частоту, период короткого замыкания муфтовых обмоток софт плавно управляет 0-100% пробуксовкой (скольжением) сцепления. Транзисторы коротко замыкают, размыкают обмотку.
Напротив медного цилиндра двигающие им три обмотки (включаются, выключаются одновременно) маховика с транзисторами.
Возврат в нулевое положение медного цилиндра реверс-включением (задний ход) трехфазной муфтовой обмотки маховика: реверс-поле вращается против движения маховика. Вес вращающегося маховика транзисторной муфты сцепления, не входит в ускоряемые приводом массы
БЕЗЗАЗОРНЫЕ РЕВЕРС-ПРИВОДЫ:
1. постоянно вращающийся электромотор + многодисковое сцепление + привод (винт-гайка) вентилируемых (пневмосеть с радиатором) дисков. Две соединенные прогрессивным пружинным рычажным механизмом (убирает зазоры) гайки + винт с левой и правой упорными резьбами. Левая гайка на левом упорном винте толкает свой трос андроида в левую сторону, правая на правом упорном винте толкает свой трос в правую сторону. Постоянно вращаются ведущие диски с каналами воздушного охлаждения в трущихся поверхностях чтоб сдуть продукты износа дисков сцепления. Продукты износа шариками катятся между дисками, ухудшая охлаждение, линейность характеристики трения дисков сцепления.
2. электромагнитное (или винтовой привод ленты) ленточное сцепление маховика постоянного вращения тянет спиральный кулачок на роликоподшипниках. При повороте спирального кулачка по нему катит рычажное колесо, двигаясь по радиусу спирального кулачка. Рычаг колеса тянет трос.
3. вентилируемое магнитореологическое сцепление сцепляет маховик постоянного вращения с соосным спиральным кулачком в роликоподшипниках. При повороте спирального кулачка по нему катится рычажное колесо, двигаясь по радиусу спирального кулачка. Рычаг колеса тянет трос.
4. на маховик постоянного вращения напрессованы диски с обмотками + 2 транзисторные муфты сцепления, включающие соосные тросовые реверс-шкивы-1-2. С реверс-шкивов-1-2 вращение на угол 340° два троса передают в шкивы-3-4 отдельного параллельного неподвижного силового вала. Шкивы-3-4 в роликоподшипниках на силовом валу. Идущий в верхнюю часть шкива-3 силового вала трос с реверс-шкива-1 передает шкиву-3 вращение по часовой стрелке. Идущий в нижнюю часть шкива-4 силового вала трос с реверс-шкива-2 передает шкиву-4 вращение против часовой стрелки. В шкивах-3-4 в их левой части спиральный кулачок. При повороте спирального кулачка по нему катит рычажное колесо, двигаясь по радиусу спирального кулачка. Рычаг рычажного колеса тянет трос. Шкив-3 на силовом валу тянет трос сгибателя андроида. Шкив-4 на силовом валу тянет трос разгибателя андроида. Вернет назад шкив-3 отдельный трос реверс-шкива-2. Вернет назад шкив-4 отдельный трос реверс-шкива-1.
Среди универсальных самый мощный, самый легкий, самый быстродействующий, самый точный (меньше вес движущихся деталей, минимальный диапазон температур) беззазорный реверс-привод – пневмопривод с турбиной (КПД 96%) + транзисторная муфта сцепления + редуктор типа винт-гайка скольжения. Работает от абсолютного нуля до 2000°С (нитрид бора, рениевые сплавы) в воздухе, до 3000°C (соединения бора полупроводники для транзисторов) в вакууме, инертной среде.
Вариант с самарий-кобальтовыми постоянными магнитами: ресурс 10000 часов при 560°C. Самарий 1кг $60.
Самый мощный, самый легкий, самый температуроустойчивый, самый дешевый в работе, в изготовлении, в ремонте беззазорный реверс-привод – пневмотурбина + керамическое сцепление с воздушными каналами в поверхности трения постоянно вращающихся дисков + поршневой или винтовой (реверс-турбина) пневмопривод керамических дисков сцепления. Работает до 3500°C в любой радиации, в любой (подбор материалов) химической среде.
У военного робота зона от спутникового навигатора, ограничения по времени, по цветному прожектору, по визуальному маркеру, по распознавателю речи… Своим солдатам радиоопознаватели «свой – чужой». Разный сигнал у разных опознанных объектов: опознаватель «свой-чужой» переводит на обычный язык зашифрованные данные про опознаваемый объект, сверяя с базой данных.
Компоненты андроидов-солдат унифицированы с массовой бытовой техникой: упрощение, удешевление эксплуатации, ремонта повреждений андроидов-солдат в войне.
Проблемы с ходьбой, бегом андроида от малой мощности привода. Мощнее приводы андроида – меньше точность датчиков, объем и точность вычислений борткомпьютера андроида. С 2кВт даже выполнение фуэте требует малых вычислительной мощности, точности датчиков андроида. 7кВт: андроид из композитных материалов многократно крутит двойное сальто. 10кВт: 4-кратное сальто. У андроида среднего роста газотурбинный двигатель можно форсировать до 500кВт
ЗАЩИТА ОТ ПЕРЕГРЕВА ТРАНЗИСТОРНОЙ МУФТЫ СЦЕПЛЕНИЯ:
1. ленточная обмотка с алмазной или нитрид-боровой изоляцией. Алмаз: теплопроводность 6 раз больше меди. Алмазное покрытие: $0,5 – 1кв/м
2. эффект Пелтье: поглощение теплоты при прохождении электротока через спай разных по химическому составу проводников внутри вакуумного электрогенератора
3. жаропрочные провода: сплавы медь-ниобий, медь-серебро-цирконий, медь-никель, бериллиевые сплавы
4. алгоритм управления с минимальной пиковой мощностью
5. обмотки последовательно с регулируемым резонансным конденсатором: напряжение в обмотке можно поднимать (снижать) на 75%
6. жидкостное охлаждение трубчатого провода обмотки раствором щелочного металла (или его соединения) с высокой теплоемкостью: раствор лития в аммиаке выполнит функцию проводника обмотки. Аммиак в турбину аммиачно-парового турбогенератора
11) ИСТОЧНИКИ ЭНЕРГИИ АНДРОИДА: (статье 3 раза вредили) у андроида 4 топливных бака. Бак-1 (работа на улице) с наддувом выхлопными газами с пластиковой пеной для взрывобезопасности. Бак-2: домашнее топливо при сгорании которого в микротурбине в жилом помещении нет ядовитых газов.
Домашнее жидкое топливо гидрооксид калия KOH (LiOH) реагируя с парами воды крутит микротурбину. Выделяющийся горячий водород (углеводы) сгорая с воздухом выделит дополнительную энергию. Выхлопные газы – кислород + Н2О устроят людей в жилом помещении. КПД человека 30%.
Баки-3-4: размер с спичечную коробку с эластичной мембраной (сильфоном), разделяющей выхлопные газы наддува бака, топливо. Баки-3-4 поочередно заправит система подачи топлива, дает топливо двигателю в любом положении. Резервная пиротехническая подача с обратным клапаном. Андроид работает в жилом помещении с электроэнергии маховика (микротурбины)
ВАРИАНТ-2 топлива андроида:
1. магний + CO2
2. боргидрид натрия + H2O2
ВАРИАНТ-3: облученный графит. В графите после дозы 3•10 нейтрон/см накапливается энергия 620кал/моль. Эта энергия выделяется при отжиге. Это 51700кал/кг – 7,4 раза больше теплоты сгорания 1кг графита с 2,66кг кислорода: энергоемкость топлива больше 8,4 раза.
Стартовый теплоизолированный СВЧ-подогрев облученного нейтронами графита + конденсаторная паровая турбина с жидкостью не реагирующей химически на графит
ВАРИАНТ-4: газотурбинный цикл от сгорания облученного нейтронами графита с окислителем. В СМИ была информация успешного испытания новой взрывчатки в 50 раз мощнее самой мощной коммерческой взрывчатки. Скорее всего это взрывчатка, состав которой входит облученный нейтронами порошок графита
ВАРИАНТ-5: теплоаккумуляторы: гидрид лития в сосуде Дьюара при 650°С имеет 6800кал/кг при остывании до 600°С. Это 68% теплоты сгорания бензина без учета массы кислорода. Графит нагретый до 3400°C под давлением инертного газа, хранит в себе тепло 12000ккал/кг. Теплота сгорания графита 7000ккал/кг. Горячий карбид бора хранит в себе ещё больше теплоэнергии
ВАРИАНТ-6: энергию копят быстро охлажденные мелкие капли стекла за счет разницы в силе натяжения между внешними, внутренними слоями после быстрой закалки. Спустя значительное время они взрываются с энергией, ломающей толстый стакан с водой (внутри). Размеры капель уменьшить в тысячу раз чтоб детонацией заряда получить теплоэнергию
ВАРИАНТ-7: космический андроид на энергии изотопа тулий-170 + конденсаторная паровая турбина + электрогенератор + вакуумный супермаховик. Период полураспада: 4 месяца. Продукт экологичного (при герметичности тонкостенной капсулы) бета-распада тулия-170 экологичный нерадиоактивный иттербий-170. 10 месяцев непрерывной работы без заправки топливом. Работа на Земле, на планетах, в рудниках астероидов
ВАРИАНТ-8: реакция ядерно-изомерного перехода. После нагрева или рентгеновского излучения обмен протонами, нейтронами между концентрично расположенными протон-нейтронными оболочками ядра атома выделяет в виде тепла или гамма-излучения энергию. Изомер гафний-178 (полураспад 31год) облученный рентгеновскими лучами дает достаточно энергии.
Водный раствор трехокиси изомера ксенон 133m дает от изомерного перехода 232кЭв + 81кЭв от бета-распада на каждый атом ксенона. Предположительно защита изомеров от неуправляемого изомерного перехода: сильные электрические поля + высокое давление жидких газов + низкие температуры. Эффективное сечение ядра ксенона Xe135 для нейтронов 2млн раз больше его физического размера: рекорд ядерной физики
ВАРИАНТ-9: Юпитер излучает мощные электромагнитные поля на спутники: для питания телеуправляемых (лазерные лучи) андроидов отрезок кабеля. Андроид кабелем сложит на поверхности спутника большой виток антенны, заряжающей андроида за сутки.
Падение андроида в обрыв: пиропатрон надует шланг-антенну в форме круга покрытого проводящим слоем, соберет энергию электромагнитных волн Юпитера, даст SOS
ВАРИАНТ-10: андроид ест себя, отправляя отпиленный от себя абразивным кругом порошок в циклонную камеру сгорания микротурбины. Часть тела андроида изготовлена из энергоемких окислителей (бор, углерод, кремний) металлов при температуре горящей спички. Рабочий газ турбины: газ атмосферы (цикл Брайтона), вещество с внешней среды, переходящее в пар при нагреве (паровой цикл).
Высокотемпературная теплоизолированная камера сгорания микротурбины с электрогенератором. Горячие газы, после циклонного фильтра твердых частиц, крутят турбину. Турбина крутит компрессор, электрогенератор
ВАРИАНТ-11: в печи газотурбогенератора сжигаем металлы, туши мертвых животных, органику при соответствующей температуре. Для сжигания металлов пусковое топливо разогрева печи
ВАРИАНТ-12: смена аккумулятора. Датчики стыкуют робота с зарядным блоком по сигналам перекрещивающихся диагональных инфракрасных лучей
12) НЕЙРОИНТЕРФЕЙС ВМЕСТО КОСТЮМА ТЕЛЕПРИСУТСТВИЯ: (статье 7 раз вредили) человек силовой обратной связью управляет андроидом через чип-1 нейроинтерфейса, хирургически монтируемый в шейном позвонке и чип-2 нейроинтерфейса соединяемый с нервными волонками вестибулярного аппарата. Для управления приводами андроида с 4 пальцами на руке 38 каналов силы + 38 каналов угла + 3 канала угла туловища андроида от местной вертикали: 79 пропорциональных каналов обратной связи.
Человеку для работы достаточно 200 нервных волокон (электроимпульсы мозга частотой до 300Hz) управляющих 200 мышцами + 200 нервных волокон с датчиков длины мышц + 200 нервных волокон с датчиков силы мышц + 3 канала вестибулярного аппарата: 603 пропорциональных канала обратной связи.
Таблицы решений сигналов чипов-1-2 нейроинтерфейса 603 канала обратной связи человека преобразуют в цифры степеней свободы 79 каналов обратной связи андроида.
Чип-1 нейроинтерфейса напрямую подключает 600 из 30000 нервных волокон (внутри позвонка) позвоночного кабеля человека к электродам коммутатора-ВЕРХНИЙ чипа нейроинтерфейса.
К каждому нервному волокну кроме контакта коммутатор-ВЕРХНИЙ, на 5мм ниже подключен контакт коммутатор-НИЖНИЙ. Итого 600 электродов сверху волокон + 600 электродов на 5мм ниже.
Разделение электродов на верхние и нижние нужно для временного отключения тела человека от его мозга и подключения андроида вместо тела. Силовую обратную связь «мозг – андроид» выполняет коммутатор-ВЕРХНИЙ.
Одновременно с приходом импульса (частота до 300Hz) мозга, чип-1 нейроинтерфейса коммутатором-НИЖНИЙ в нервные волокна дает противофазное напряжение частотой больше 700Hz чтоб временно не пускать к телу человека импульсы мозга.
Для решения проблемы отторжения электродов контакты чипа нейроинтерфейса с нервными волокнами выполнены бесконтактно: коаксиальная (электрод экранирует нервное волокно золотой сеткой) наводка СВЧ-импульсов током поляризации или электромагнитная наводка СВЧ-импульсов вихревым током. Мощность СВЧ-генератора очень мала: при росте частоты СВЧ-генератора вдвое, мощность 4 раза меньше.
Противофазное напряжение бесконтактно в нервном волокне чип-1 генерирует СВЧ-импульсами с резко нарастающей, медленно спадающей амплитудой полупериода колебания (дают постоянный ток в одну сторону) или СВЧ-импульсами с медленно нарастающей, резко спадающей амплитудой полупериода колебания (постоянный ток в противоположном направлении) в зависимости от фазы, полярности импульса мозга. Для отключения от тела одного импульса мозга нужно ~10000 несимметричных импульсов с СВЧ-частотой.
Противофазные напряжения нижнему коммутатору чип-1 дает по таблицам решений «напряжение коммутатор-ВЕРХНИЙ – напряжение коммутатор-НИЖНИЙ».
Картинка телекамер андроида в 3D-очках человека. Человек лёжа неподвижно в кровати (сидя в кресле автомобиля) управляет андроидом. Цифры обратной связи с датчика углов туловища андроида от местной вертикали чип-2 нейроинтерфейса дает в мозг человека. Чип-2 нейроинтерфейса временно отключает нервные волокна вестибулярного аппарата от мозга как и чип-1 нейроинтерфейса.
Для управления андроидом подходят чипы нейроинтерфейса описанные ниже в НЕЙРОПРОТЕЗ GE2.0.
Средняя частота опроса мозгом пропорциональных биодатчиков силы, длины мышц человека 10Hz (альфа-ритм мозга). Человек управляет приводами андроида в среднем каждые 0,1сек. В ходьбе, беге мозг обрабатывает до 50Кб/сек с биодатчиков мышц.
Нейроны:
1. нейроны-коммутаторы: прием, распределение сигналов датчиков по нейронам-обработчикам
2. нейроны-обработчики систематизируют сигналы датчиков
3. нейроны-алгоритмисты создают сигналы управления телом
4. выходные нейроны-коммутаторы распределяют сигналы мозга по телу
5. нейроны-усилители поднимают напряжение сигнала
Нейроинтерфейс подключающийся электродами к коже на голове непригоден для управления андроидом: задержка управления андроидом в разы больше требуемых 0,1сек, помехи достаточно сильны из-за напряжение сигнала всего 0,01V. И сам сигнал не выходной сигнал мозга.
НЕЙРОПРОТЕЗ GE2.0: (статье 6 раз вредили) после перелома позвоночника протезам или отключенным от мозга рукам, ногам нужен сигнал мозга. Сигналы с мозга в мышцы детектирует, усилит, направит в протезы (в руки, ноги) микротомограф. В центральных отверстиях позвонков позвоночный кабель человека: 30000 нервных волокон.
Выше точки перелома позвоночника на самом верхнем позвонке, окружая кольцом позвоночный кабель, хирургически закреплен чип нейроинтерфейса в виде кольцевого микротомографа с 2 постоянными магнитами.
Микротомограф поочередно фемтосекундными импульсами по конусу сканирует с углом 45° к оси позвонка нервные волокна. Сегодня фемтосекундные рентгеновские импульсы получают прибором умещающимся на ладони.
Через нервные волокна микротомограф пропустит одним импульсом 2 совмещенных тонких монохроматических рентгеновских луча. В биении 2 монохроматических рентгеновских частот полученная синтезированная частота (разность 2 частот) электромагнитных волн по действию не отличается от обычной электромагнитной волны такой же частоты.
Синтезированная частота по энергии совпадает с энергией перехода электрона щелочного метала в нервном волокне с внутреннего энергетического уровня атома на внешний. Получив энергию синтезированной частоты электрон уйдет с внутреннего уровня на внешний. По потере энергии матрица полупроводниковых приёмников микротомографа строит карту потенциалов нервных волокон позвоночного кабеля.
Возврат возбужденного электрона с внешнего энергетического уровня атома на нижний – в паузе между импульсами (10Hz) микротомографа. Потенциал (0,1-1,5V) нервного волокна по магнитооптическим эффектам: эффект Зеемана, эффект Фарадея, эффект Коттона-Мутона, эффект Ханле, эффект Фохта.
Или биениями синтез резонансных частот нервного волокна, на которых велики электрооптические эффекты: эффект Штарка, электрический эффект Керра, электрический эффект Поккельса, стрикционный эффект.
При детектировании сигнала мозга через электрооптические эффекты, нервные волокна электрически поляризуют высоковольтные изолированные кольцевые электроды сверху, снизу томографического позвонка.
Появление в нервном волокне потенциала сигнала мозга меняет резонансные частоты электронных оболочек атомов для магнитооптических эффектов в нервном волокне.
Совпадение резонансной частоты магнитооптического эффекта с частотой биений отметит в 2D-карте потенциалов сечения позвоночного кабеля матрица приёмников микротомографа. Потенциал нервного волокна микротомограф определит по скорости роста электропотенциала нервного волокна.
Вариант: вместо чипа нейроинтерфейса с рентгеновским микротомографом чип нейроинтерфейса с магнитно-резонансным микротомографом.
Сигнал мозга к мышце: серия колебаний напряжения (потенциала) нервного волокна. Полученную с нервного волокна серию колебаний напряжения таблицы решений переведут в сигнал привода протеза. Микротомограф поочередно сканируя нервные волокна позвоночного кабеля поочередно соединит их потенциалы с каналами управления протеза.
Человек ноутбуком подключенный к компьютеру протеза, выберет зависимость графика усиления сигнала каждого нервного волокна от внутренних параметров тела, от внешних условий. Выберет уровень приоритета каждой группы сигнальных каналов.
Сигналы нервных волокон микротомограф дает протезу с 3-кратным дублированием: 3 однопроводных (провод-2 тело человека) канала.
Для парализованного человека протоколы искусственных управляющих импульсов мышц софт заранее создает не из сигналов мозга, а по почерку реакции мышц данного человека на управляемый софтом генератор импульсов.
Софт найдет по почерку все закономерности (частота, полярность, длина пауз между импульсами, скорости роста и падения силы тока, напряжения) протоколов искусственных импульсов мышц.
Функцию датчика скольжения симулирует софт кевларовой робокожи протеза по вектору движения пиков сигнала датчиков давления, сдвига.
Передачу ответного сигнала робокожи, от внутренних органов в мозг симулирует переход на внешний возбужденный уровень электронов энергетических уровней атомов щелочных металлов нервного волокна, выполненный сфокусированной на данном нервном волокне синтезированной частотой.
При возбуждении часть электронов переходит в свободный электронный газ нервного волокна, создавая отрицательный потенциал, идущий в мозг от робокожи, внутренних органов, делая протезы неотличимыми от обычных рук, ног.
3D-тактилку снимет 3-слойная робокожа: под робокожей упругий материал, под которым ещё одна робокожа.
Мозг человека по напряжению ответного сигнала позвоночного кабеля находит в своих таблицах решений значение электрической емкости группы параллельно соединенных нейронов-усилителей управляющего импульса. Они генерируют последовательность импульсов мышцы. Мышца включается от скорости изменения напряжения.
Потерян сигнал нерва: стандартное движение мышцей перед телекамерой облегчит софту поиск нервного волокна. Софт алгоритмами с 100 каналов получит 200-300.
Сигналы мозга снимут бесконтактные (нет проблемы отторжения электродов) конденсаторные датчики на выходящих с межпозвоночного отверстия нервных волокнах.
Ввод сигналов обратной связи с протеза в нервные волокна методом высоковольтной (6000V, 0,0000001А. Цепь гальванически изолирована от тела) электромагнитной наводки: импульсы с резко нарастающей, медленно спадающей амплитудой полупериода колебания или наоборот.
Чтоб не прыскать электролит на культю протеза: датчик конденсаторного типа + СВЧ-ток резонансной высоковольтной раскачки электронов кожи + электроды с проволочной путанки с тонкой пружинящей проволоки.
Пользователи нейроинтерфейса могут работать образе андроида
13)
ДАТЧИК ТЕПЛОВОГО ПОТОКА, СКОРОСТИ, ВЕКТОРА
(статье 6 раз вредили) главный параметр погоды теплопоток воздуха. Датчик теплового потока: 3 медные пластинки. Пластинка-1 снаружи принимает тепло. Пластинка-2 спаянная с пластинкой-1 это термопара-1 меряющая скорость теплопотока. К пластинке-2 с внутренней стороны припаяна пластинка-3 теплоизолированная с внутренней стороны – термопара-2.
Компьютер подавая ток, меняя полярность в термопаре-2 держит в ней постоянную температуру таблицей решений датчика. По отношению токов термопар-1-2 софт вычислит теплопоток.
Датчик теплопотока делает ненужным капризный датчик влажности в метеостанциях. Теплопоток не зависит от давления воздуха, сильно зависит от влажности (пары воды = большая теплоемкость) воздуха, скорости ветра. По скорости ветра софт таблицей решений найдет влажность воздуха.
Мой 3D-датчик скорости, направления ветра заменяющий трубку Пито в самолетах: расположенные равносторонним треугольником или 4-угольником пьезоизлучатель-приемники ультразвукового импульсного измерителя скорости. Пьезоизлучатель дает импульс ультразвука: 6 периодов. Ветер ускоряет движение импульса к пьезоприемнику.
Пьезоприемник поймавший звуковой импульс, отправит электроимпульс (усилен усилителем) пьезоизлучателю. Пьезоизлучатель под действием электроимпульса снова излучает ультразвуковой импульс. Потом это делает вторая группа «пьезоизлучатель – пьезоприемник». Потом третья группа «пьезоизлучатель – пьезоприемник». Скорость потока: по времени, в течение которого по кругу «пьезоизлучатель – пьезоприемник» импульс проходит стандартное число раз.
По цифрам 3D-датчик определяет угол атаки самолета. 3D-вектор потока воздуха определят два таких ультразвуковых датчика самолета. Во время дождя частота ультразвука уменьшается до звуковой.
Этот датчик вектора и скорости потока работает в любых газах, жидкостях. Его ультразвук скалывает лед, тогда как трубку Пито выключает лед. 2D-датчик точно, безиннерционно заменит на самолетах датчик воздушного давления (трубка Пито для измерения скорости самолета), датчик угла атаки, не отражая лучи радара он работает также на сверхзвуковых, гиперзвуковых скоростях.
Матрицы ультразвуковых датчиков на поверхности (софт видит все потоки воздуха) беспилотника позволят сажать его на авианосец без обмена датчиковой информацией с компьютером авианосца. Аналогичную систему как датчики расхода воздуха, датчики влажности в автомоторы. Ультразвуковой 3D-датчик скорости и вектора (направления) потока в подводных беспилотниках, подводных лодках
14)
ЗАЩИТА РАДИОУПРАВЛЕНИЯ БЕСПИЛОТНИКОМ, РОБОТОМ: (статье 6 раз вредили) ЮАР, Ирак: перехват радиоуправления наземными военными роботами разведками стран, фракциями контрразведки.
Ирак: разведка России имея радиосигнал телеуправления роботом с синхронным сигналом местной длиннофокусной телекамеры, взломала шифр радиолинии управления роботом и гонкой узконаправленных мощностей радиопередатчиков направленных на антенну робота перехватила управление роботом: он целился стволом в американских солдат, расстрелял свой приемопередатчик.
Радиокоманды дешифруют сравнивая портрет радиокоманды с видео её работы. Используя найденный шифр в передатчике более высокой, чем у оператора робота, мощности или направленности излучения разведслужбы перехватывают управление роботами, беспилотниками.
Криптозащита радиоуправления костюма телеприсутствия GE2.0: у каждой команды обратной связи свой псевдослучайный номер, метки начала, окончания команды. В следующей команде другие номер, шифр. Длина команды ограничена стандартными числами символов, импульсов. После чего без правильного номера, команды «псевдослучайный номер» новая команда не идет. Псевдослучайная длина пакетов цифровой связи. Вариант-2: диалоговая перемена шифра каждые 1-4сек.
Команды не идут без идентификации меток начала, конца команды. Допуски времени на каждую часть сигнала, переходов между ними. Динамический шифр меняют уточняющие сигналы маяка.
Программное отключение сектора гиростабилизированной диаграммы направленности фазированных антенн робота, откуда шли ложные команды. Сигналы сектора подавляет синтезированный противофазный сигнал. Псевдослучайный перескок несущей частоты по динамическому шифру. Ретрансляторы с несколькими азимутами направлений прихода сигнала динамическим шифром переменной задержки сигнала блокируют пеленгаторы.
Радиоприемник от электромагнитной бомбы защищает последовательно подключенный к каждому проводу конденсатор и перед ними параллельно подключенный разрядник.
Я изобрел многокруговой диалоговый динамический пароль. Сотни кругов, каждый – замкнутая последовательность сотен уравнений в памяти ключа (пароля), замка. Используются только уравнения которые невозможно решить по 5 точкам их графика. Ключ (пароль) сигналом предлагает замку вычислить ключ (пароль) свой или чужой. Замок в ответ предлагает ключу (паролю) число от генератора случайных чисел.
Ключ (пароль) подставляет число в уравнение-1 в круге, ответ отправляет замку. После получения ответа независимо от правильности ответа замок отправляет ключу (паролю) случайное число-2. Ключ (пароль) ставит его в уравнение-2 с круга уравнений, ответ отправляет замку. Далее в том же порядке. Ответы правильны – замок признает ключ своим.
Могу обеспечить много резервных каналов на единственной цифровой линии с сильными помехами. Функция антисканирования за счет синхронного переключения ключа (пароля), замка с одного круга уравнений на другой круг через предустановленный период времени. Таймер отключается после посылки сигнала, включается после приема. Предустановленный период времени может синхронно меняться у ключа (пароля).
Скрытый контрпароль: на правильный пароль сторона-2 отвечает контрпаролем в тексте (нужно знать где). Число попыток вызова формы подачи пароля стороны-1 ограниченно прогрессивным периодом включения формы подачи пароля.
Неверные сигналы управления вывели из строя все (2 станции в 1989г, 1 в 1996г, 1 в 2011г) тяжёлые автоматические станции «Фобос-грунт». На выводе в орбиту самой тяжелой в Истории автоматической станции «Марс-96» плазма вокруг обтекателя ракеты-носителя на рабочей частоте автоматической станции не даёт послать сигнал замены кода её софта в пролёте над чужой территорией.
2 электромагнитные волны окна прозрачности плазмы сложившись образуют частоту биений. Частота биений 2-х частот действием на колебательный контур приёмника ничем не отличается от обычной электромагнитной волны с такой же частотой. Принимает антенна приёмника как полезный сигнал. Возможно одна из стран биениями 2-х частот окна прозрачности плазмы синтезировала рабочую частоту станции «Марс-96», добавив команду-убийцу.
Защита от синтезированной частоты: в подъёме на орбиту, пролёте чужой территории программный таймер отключит от питания компьютер космических аппаратов. Принятую команду шифруем, отправляем своим: проверка вмешательства. Пришла квитанция: команда не прошла проверку – дублируют заменив шифр. В шифре информация о времени, направлении приема неверной команды. Далее алгоритмы другие.
2007г ЮАР: софт радара зенитки Oerlikon GDF в режиме «доплеровская селекция по скорости» расстрелял 9 солдат: реакция на движение по эффекту Доплера.
Защита радиоуправления, электроники от высоковольтных помех: для защиты от искажения формы графика сигнала известной частоты вычитаем из сигнала (выход антенны) высоковольтной частоты помехи противофазные ей полупериоды сгенерированной противофазной частоты сигнала. Плавно двигаем на 180° фазой сгенерированной противофазной частоты сигнала, выделяя сигнал из частоты высоковольтной помехи.
Теперь плавно меняя уровень сгенерированной противофазной частоты сигнала добьемся максимум отношения сигнал/шум. Результат: на выходе электронных устройств чистый радиосигнал в условиях сильных помех от высоковольтной линии электропередачи. Защита от широкополосных помех: делим помехи на отдельные частоты, раздельная очистка.
Напряжение электромагнитной бомбы идет в объект по кабелю питания. Поэтому через кабель энергия должна поставляться объекту через Промежуточную Ступень Энергоснабжения ПСЭ: конденсатор с транзисторными реле между кабелем и объектом.
Вначале конденсатор ПСЕ транзисторными реле отключается от объекта и подключается к кабелю. От кабеля конденсатор зарядится энергией и по транзисторному вольтметру через транзисторное реле отключит оба провода от кабеля, подключит оба провода к объекту. Повтор процесса.
Вариант-2: конденсатор с индуктивностью или закорачиваемая транзистором индуктивность. Высоковольтные входные каскады приемника + разрядник закоротит вход от электромагнитной бомбы.
В телевидении 3 раза в новостях не включались в дорогах электронные системы подавления дистанционного управления минами. Террористы за минуты до теракта по радио переводят управление миной в режим алгоритма подрыва от снижения максимума (цифра) помехи системы подавления дистанционного управления мин. Знаю как блокировать такие алгоритмы
ВИДЫ ЭЛЕКТРОМАГНИТНОГО ПОРАЖЕНИЯ ВОЕННЫХ РОБОТОВ:
1. вихревые токи Фуко. Защита: высоковольтные микропроцессоры. На них в 99% случаев не действуют электромагнитные бомбы: напряжение наводимое на цепи роботов в городском бою обычно ~100-200V. Сегодня есть транзисторы на 6000V.
Микропроцессорный блок робота за 3 экранами. Экраны-1-2 из меди. Между медным экраном-1 и медным экраном-2 постоянное поляризующее напряжение 100000V и больше для защиты от высотной разности потенциалов из-за сдувания с молекул воздуха электронов гамма рентгеновским излучением термоядерного взрыва на высоте 80-500км и сдувания электронов с атомов излучением от рентгеновской обратной связи.
Между медными экранами-1-2 диэлектрик с высокой диэлектрической проницаемостью, который сгладит острые пики волн от электромагнитных бомб.
Экран-3 из феррита закроет от вихревых токов Фуко (те самые 100-200V)
2. градиент разности потенциалов (напряжение) в 1млн.вольт на 1м по высоте от сдувания с молекул воздуха электронов гамма и рентгеновским излучением термоядерного взрыва. Защита: экран из эрбия 167Er защитит микропроцессорный блок робота от гамма и рентгеновского излучения. Для защиты микропроцессоров от нейтронных бомб возможна установка экрана из гадолиния 157Gd
3. сдувание электронов с атомов рентгеновским излучением. Направленное рентгеновское излучение получают тонкой вольфрамовой пленкой на конусной подложке из высокотеплопроводного диэлектрика. По вольфрамовой пленке пропускают высоковольтные сверхкороткие (для охлаждения) импульсы постоянного тока.
Электрон поглощает рентгеновский фотон при совпадении его энергии с энергией отрыва электрона от атома. Микропроцессоры блокируют рентгеновским излучением с энергией фотона подобранной к материалам неэкранированного от рентгеновского излучения микропроцессора. Защита: экран из эрбия 167Er
4. оптронику блокируют биениями рентгеновских частот.
Компьютер ядерной ракеты датчик радиоактивности отключает на 2мин при близком взрыве ядерной противоракеты. Работают только аналоговые приборы, аналоговый автомат стабилизации, лазерный оптоволоконный 3D-навигатор, датчики ускорений
СВЯЗЬ С НАЗЕМНЫМИ ВОЕННЫМИ РОБОТАМИ
В наземном роботе 4-лучевая фазированная антенная решетка смотрит на высоко летающий беспилотник-ретранслятор в небе, ориентируясь по его сигналу.
Ложные доплер-сигналы спутников (двойное назначение) антиПРО + антиGPS с разных сторон синтезируют помехи радарам ПРО США и GPS.
В 21 веке рост вероятности предумышленных киберкатастроф автомобилей через интернет-доступ к их системам. Вырастет спрос на киберзащиту (автомобильный антивирус) автомобилей, спрос на автомобили недоступные беспроводным сетям.
Децентрализация систем, 4-кратное дублирование с разными принципами действия + голосование каналов дублирования с алгоритмом подсчета коэффициента достоверности каждого канала дублирования снизят вероятность предумышленных киберкатастроф автомобилей
РАДАР
Крупным беспилотникам не нужны радары с фазированной антенной решеткой ФАР. Им нужны радары рассредоточенного типа, у которых при равной стоимости угловая точность определения направления на цель в ~30 раз лучше, чем у радара с ФАР. При равной эффективности рассредоточенный радар ~20 раз дешевле радаров с ФАР.
Радар рассредоточенного типа – это 3 беспилотника с передатчиками, соединенные военным интернетом в рассредоточенный радар, определяющий координаты цели синусно-косинусными уравнениями (триангуляция).
Радар с ФАР плохо определяет скорость цели: лучевая скорость не скорость цели. Рассредоточенный радар вычисляет скорость цели на ~10% точнее радара с ФАР. За счет бокового (особенности диаграммы эффективной площади рассеяния цели) наблюдения цели рассредоточенный радар находит (при равной стоимости радара) ракеты-стелс и самолеты-стелс на расстоянии в ~2 раза большем, чем радар с ФАР.
Уничтожить рассредоточенный радар примерно в 100 раз дороже, чем уничтожить радар с ФАР. Группа рассредоточенных беспилотников перекидывает друг на друга функции радара по алгоритму привязанным к местным ориентирам: радиомаяки, Солнце, гора...
Защита радара: фазовый анализ сигналов разнесенных радаров
СТЕЛС-РАДАР
В пространстве между 2 радиопрозрачными конусами обтекателя радара, превращается в холодную плазму смесь инертных газов в продуваемой вентилятором камере с сетками СВЧ-ионизатора.
Спектр поглощения смеси газов (плазма) подобран под частоты поглощения излучения наземных, воздушных радаров. Перед включением радара ионизацию увеличиваем. Выключение радара: продувка вентилятором плазмы через сетки (потенциал противоположного знака) СВЧ-ионизатора в режиме деионизатора.
Беспилотник (наземный робот) шлет вдогонку отраженному от него импульсу радара противника дополнительные импульсы (их форма, амплитуда скопированы; ракурсная таблица решений).
Если период между поддельными импульсами больше – радар видит: цель уходит. Период между импульсами меньше (имитация эффекта Доплера) – цель «приближается»: имитация атаки противорадарного управляемого снаряда. Фальшивые отражающие импульсы дадут «размножение целей» если расшифрован алгоритм изменения подписи импульсов радара противника.
ЗАЩИТА ОТ АНТИРАДАРА
Спецслужбы, преступники будут генерировать антирадаром ложные импульсы радарного круиз-контроля для предумышленного столкновения машин. Защита от столкновений моей фирмы GE2.0: защищенный от предумышленных помех автомобильный радар с перестройкой частоты от генератора случайных чисел.
Радар определит расстояние до машины впереди цугом из 3 импульсов. Сигнал радара защищен динамическим шифрованием отношения расстояний между импульсами. За доплату: версия радара с изменением не только отношения расстояний между импульсами в измерительном цуге, но и раздельным выбором генератором случайных чисел частоты каждого импульса в цуге.
Радар непрерывно дает белый шум в котором спрятаны 3 импульса измерительного цуга. Попытка глушить измерительный цуг с 3 импульсами радара дает водителю звуковой сигнал: по сигналам 2-х приемников излучения по бокам автомобиля, покажет в дисплее (от телекамеры) лобового стекла обведенный цветной линией внешний контур автомобиля спецслужб.
Узконаправленная электромагнитная пушка вихревыми токами Фуко выводит из строя микропроцессор дизеля автомобиля. Напряжение разрушения: микропроцессоры 6-10V, микросхемы динамической памяти с произвольным доступом DRAM до 7V от земли, CMOS логика 7-15V, кремниевые высокочастотные транзисторы связного оборудования 15-65V, арсенид-галиевые полевые транзисторы 10V.
Наиболее вероятное напряжение вихревых токов Фуко в микропроцессорах от военной электромагнитной бомбы: 200V. Защита от электростатической, электромагнитной составляющих импульса электромагнитной пушки: используем микропроцессор с рабочим напряжением 500V (производятся для управления электромоторами) + экранировка электроцепей, микропроцессоров автомобиля по коаксиальному, экранному принципу.
2 изолированных друг от друга наэлектризованных высоким напряжением (внутренний экран: минус; внешний: +) экрана из магнитомягкого материала с медным покрытием. Между экранами диэлектрик с высокой диэлектрической проницаемостью, постоянное высокое напряжение пьезотрансформатора 20000V.
Импульсы электромагнитной пушки медленно растут, быстро спадают = проникающая способность электромагнитной пушки вдвое больше: вдвое больше нужна толщина магнитомягкого экрана, в 2,1 раза больше масса защиты
АНТИЛИДАР: обратная связь дальнобойного лазера с его фотоэлементом в бинокле. На атаку военных роботов с искусственных интеллектом оборона ответит полным ослеплением их лидаров ложными импульсами антилидарного софта. Лидарные роботы – тупик эволюции. Их вытеснят телекамерные роботы с распознаванием изображений
ЗАЩИТА ОТ АНТИЛИДАРА: для защиты лидара робота от помех антилидаров робот-истребителей сканирующий импульс лидара с динамической (постоянно меняется по алгоритму) подписью, устойчивой к фазовым сдвигам сложения нескольких отражений импульса с разными длинами путей
РАДИОСВЯЗЬ С ПОДЛОДКАМИ на звуковых радиочастотах, глубина 60м, передача буквы за 20мин, способы:
1. наземная антенна из 2-х горизонтально проложенных ПЕРПЕНДИКУЛЯРНЫХ ПРОВОДЯЩИХ ТРУБ (или диполь Надененко) длиной 25% длины волны
2. наземная микроволновая антенна модулирует амплитуду излучения с резонансной частотой (или её гармоникой) ионосферного слоя на высоте ~100км. Ионосферный слой переизлучает полученную энергию на своей резонансной частоте, её гармонике: 1-20000Hz
3. спутник узконаправленно дает подлодке на глубине 60м, информацию радиоволнами звуковых частот через биения 2-х УКВ-частот
Как при отказе радио передать с аэродрома на борт самолета речь диспетчера? (статье 5 раз вредили) Даем на обшивку самолета широтно-импульсно модулированные сверхкороткие (чтоб стенка не успевала поглотить тепло) импульсы лазера.
Испарение поверхностного слоя обшивки – пар материала обшивки – охлаждение обшивки за счет переноса энергии лазера на пар – разлет паровой линзы от перегрева с передачей реактивного импульса обшивке. Повторы цикла. Через ШИМ-модуляцию в самолете зазвучит речь диспетчера. Аналогично лазер механически передаст через вакуум речь на космический корабль. Мощность лазера в случае вакуума в 2-4 раз меньше.
Передача речи с подлодки на корабль, другую подлодку: передают через воду 2 равные ультразвуковые частоты, одну из них модулирует звук по частоте. Попав на борт другой подлодки они передают звуковую частоту их биений корпусу подлодки, корабля. Эту частоту биений как чистую речь слышат моряки
15)
ГИДРОБОТЫ: (статье 5 раз вредили) в следующей ступени эволюции подводных лодок нет деления на защищенные от давления воды отсеки. Такой отсек, из титанового сплава, только 1 в центре подлодки. Спереди, сзади подлодки тонкие легкие обтекатели. Обтекатель из 2-х углепластиковых листов.
Внутренние углепластиковые листы мелко продырявлены по всей поверхности для выравнивания, при быстром погружении, давления с водой в мелко продырявленных сотах, соединяющих внешний, внутренний листы обтекателя.
Внутри переднего обтекателя подлодки забортная вода, датчики, оружие. Внутри заднего обтекателя забортная вода, двигатель, оружие, датчики. Оба обтекателя оклеены снаружи, изнутри поглощающим звук, ультразвук упругим пенопластом толщиной 10см. Оружие, прочие объекты залиты изнутри силиконовым маслом (диэлектрической жидкостью).
Силиконовое масло сообщается с забортной водой через закрытый с одной стороны пластмассовый армированный шланг или мешок. Деформация шланга или мешка (уравнивание давлений) защитит беспилотники, баллистические, крылатые ракеты от давления забортной воды на неограниченной глубине.
Нет контакта химически агрессивной забортной воды, зловредных микроорганизмов с внутренней начинкой беспилотника (ракеты). После вылета беспилотника (ракеты) из воды газ многосерийных, поочередно включаемых пирозарядов, вытеснит силиконовое масло с внутренних полостей беспилотника (ракеты), осушая их.
Следующий ступень эволюции подлодок: централизованная схема защиты от давления: вместо деформируемого шланга большой армированный пластиковый соляровый мешок внутри переднего обтекателя подлодки. Солярка – топливо дизельного электрогенератора подлодки, работающего через шнорхель на аккумуляторы.
Внутренние полости беспилотников (ракет) заполнены изнутри соляркой, через отрезок армированного шланга с электрозамком соединены с централизованным трубопроводом большого солярового мешка через последовательно 3-кратно дублированный обратный клапан.
Деформация большого солярового мешка через трубопровод компенсирует рост давления забортной воды на беспилотники (ракеты) при погружении подлодки. При потере герметичности отсека экипажа, гибели экипажа, падении в любую глубину дна океана подлодка сохранит функции.
Проблема подлодок экипаж. Без экипажа размеры, вес, стоимость в сотни раз меньше, живучесть в сотни раз больше. Подлодки с экипажем доживают последние десятилетия: сменят универсальные глубоководные роботы с ИИ.
Потребность в топливе решается окислением измельченной флоры, фауны морей в химреакторе. В химреакторе больше температура, давление + проволочная путанка покрытая катализатором. Для очистки проволоки от окисленной флоры, фауны по проволоке пропустят ток.
Формы выхода энергии: химическая, электрическая, тепловая. Под водой турбина робота работает без демаскируюших газов на воде, органике
Перспективным топливом роботов, торпед считают:
1. магний + CO2
2. боргидрид натрия + H2O2
Шаг к колонизации звезд: международные договоры ограничения глубоководного размещения в морском дне законсервированных крылатых стелс-ракет (старт с вылетевшего c воды контейнера). Защита от них дороже противоракетной обороны от баллистических ракет, отнимет финансы от колонизации звезд. Ракеты под водой замаскированы контейнер-роботами под морских животных, рыб.
Момент массированного запуска этих ракет от программы или ЗВУКОВЫХ (удалили) частот (1 буква за 20мин на глубине 60м: хвост-антенна длина 500м) радиоволн совпадет с активностью обществ защиты природы.
Для поиска законсервированных в морском дне подводных ракет в контейнерах робот-охотники используют подводную трал-антенну с постоянным пульсирующим, медленно нарастающим, быстро спадающим до нуля током.
В фазе быстрого спадания тока фиксируются ступеньки вольт-амперной характеристики транзисторов, диодов ракет. Определив местонахождение законсервированной на дне подводной ракеты робот-охотник манипуляторами раскопает в морском дне ракету, струёй высокого давления режет её.
Работа звукодатчиков зависит от преломления звука в сторону слоев воды, имеющих меньшую скорость звука. Скорость звука в воде растет при снижении температуры за счет уменьшения расстояния между атомами: по закон-2 Ньютона скорость торпеды в холодной воде на 3% меньше теплой: в холодной воде на 3% больше частота упругих (без отрыва электронов) столкновений молекул из-за меньшего расстояния между атомами.
Преломление звука вычислит компьютер по температурной 3D-карте дна. Функцию датчиков температуры выполнят быстроходные гидроботы с жесткой программной траекторией, излучающих сигнал точного времени к 3 разнесенным приемным микрофонам большого гидробота.
По разности времени прихода сигнала, по доплеровскому смещению софт строит температурную 3D-карту дна. Датчик ускорения или микрофон измерит температуру воды по колебаниям силы лобового сопротивления воды от действия закон-2 Ньютона
ГИДРОБОТЫ ПРОТИВ АВИАНОСЦА: в каждом члене змееобразного тела гидробота 3 складывающихся (2D-шарнир крылышка), заточенных под топор трапецеобразных крылышка. Топорообразными крылышками гидроботы ударами режут днища катеров, рубят диверсантов. Трос с катушки гидробота, замотав винт остановит корабль. Лежащий на дне стелс-гидробот отклеится от дна с помощью гидрореагирующего топлива, вкачиваемого под днище.
Для защиты от сонара акустическая плотность поверхности гидроботов плавно растет от поверхности к телу. Поверхности гидробота с мелкими продольными рисками-каналами, с мелкими отверстиями с резонансными камерами с управляемым объемом. Гашение ультразвука противофазным ультразвуком.
Квантовый магнитометр подлодки находит бесшумные подлодки быстрее пассивного звуколокатора. Поэтому подлодка будущего ищет, атакует своей сетью небольших гидроботов с ИИ; с магнитными, звуковыми, химическими датчиками; с датчиком смещения вектора гравитации; с буксируемым тросом с звуковыми, магнитными, электрическими датчиками
16)
РОБОТ-ЗМЕЯ: для работы в сложных сочленениях труб атомной промышленности, городской канализации… мой робот-змея (гидробот) GE2.0: несколько членов соединенны последовательно 2D-шарнирами (2 оси перпендикулярны к продольной оси члена робот-змеи).
У каждого члена робот-змеи 2 шарнира с параллельными осями и параллельные их осям маховично-тросовые приводы с 4 тросами. Все члены робот-змеи одинаковы, по конструкции, размерам. Тросы не соприкасаются с внешней средой, отделены от внешней среды круговым уплотнением вала изменения угла сочленения.
Механика робот-змеи собирается по принципу: последующая деталь фиксирует предыдущую + упругие защелкивающиеся фиксаторы с инерционной 3D-балансировкой.
Для быстрого прохождения плавающего робот-змеи через сложные изгибы трубопроводов 8 датчиков расстояния в каждом 2D-шарнире робот-змеи. 2D-шарнир робот-змеи: 2 одинаковые половинки соединенные клиновым беззазорным фиксатором. В каждой половинке 4 датчика расстояния. 2 соединенные половинки имеют 8 равномерно по углу обзора, расположенных датчика расстояния. У каждого датчика свой номер.
При движении робот-змеи по сложным изгибам трубопроводов автоматы расстояния держат одинаковое расстояние между 2D-шарниром робот-змеи и внешней средой. Автомат расстояния сигналами датчиков управляет 2 тросами привода.
В каждом члене робот-змеи водомет с дросселируемыми входными водозаборниками + выходных дросселируемых сопла. Расстояние до внешней среды меньше цифры по таблице критических расстояний – уменьшается скорость.
Энергетический приоритет у каналов, где меньше критическое расстояние. Каждый датчик расстояния 2-канальный: лазерный дальномер + ультразвуковой дальномер. В загрязненной жидкой среде работает ультразвуковой дальномер. Морской вариант робот-змеи: 3 плавника в каждом члене
17)
ЭЛЕКТРОДИСТАНЦИОННЫЙ ЭКЗОСКЕЛЕТ GE2.0 (статье 22 раза вредили) экзоскелет с электродистанционным
(копирующая обратная связь по проводам, по оптоволокну, по радио, по оптическому, инфракрасному, ультрафиолетовому, рентгеновскому, терагерцовому каналу, по гамма-лучам, по ультразвуковому, по нейтронному, по нейтринному, по мюонному каналу, по протонному или ионному каналу в вакууме…)
интерфейсом: управление без прямой механической связи человека с руками, ногами экзоскелета.
Человек механически управляет только управляющими экзоскелетами на руках, ногах. Управляющие экзоскелеты рук, ног человека по проводам силовой обратной связью в обе стороны передают углы, силы на руки и ноги силового экзоскелета.
Пропорциональные датчики силы, угла: в экзоскелетах рук, ног человека; в приводах рук, ног экзоскелета.
Пропорциональный датчик силы: бесконтактный 4-кратно дублированный датчик, оптоволоконный датчик, магнитный датчик, электростатический датчик, ультразвуковой датчик…
ПРОПОРЦИОНАЛЬНЫЙ ДАТЧИК СИЛЫ: оптоволоконный датчик силы: вклеенное в конструкцию оптоволокно с зеркальным торцем. Свет когерентного лазера в оптоволокне отражает его зеркальный торец. Нет нагрузки – отраженный свет вернувшись назад в противофазном режиме сложения волн гасит луч лазера на фотоэлементе. Приложенная сила удлинила оптоволокно: противофазного режима нет, возникший от сдвига фазы волн свет ловит фотоэлемент. Его выходной ток пропорционален приложенной к конструкции силе. Аналогично работает проводниковый (сложение прямой, отраженной СВЧ-волн) виброчастотный датчик силы.
Человек жмет пропорциональные датчики силы экзоскелета руки (ноги): датчики включая привод убегают от человека, двигая приводом на такой же угол (датчик угла) руку (ногу) экзоскелета.
Приводами экзоскелета внешняя среда управляет человеком, если его сила в установленном масштабе (от линейки резисторов, конденсаторов, ферритовых катушек, колебательных контуров или графика в софте) меньше внешней. Это силовая обратная связь: можно сделать в режиме копирующего манипулятора без сложной электроники, без компьютера
ОДНОДАТЧИКОВЫЙ ЭКЗОСКЕЛЕТ: привод держит постоянной силу управляющего датчика-1 силы руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина
ДВУХДАТЧИКОВЫЙ ЭКЗОСКЕЛЕТ: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод
СКОРОСТЬ ПРИВОДА ЭКЗОСКЕЛЕТА ПРЯМО ПРОПОРЦИОНАЛЬНА:
1. скорости роста силы
2. величине перехода силы за порог управляющего датчика
Однодатчиковое управление работает на самодиагностику. С ростом силы датчика сгибателя руки (ноги) человека сила датчика разгибателя обнулится (мала). Нет: отказ датчика силы разгибателя. Аналогично диагностика датчика сгибателя.
Софт диагностирует пары датчиков по сигналам других датчиков. Отказ датчика силы: в экране шлема схема экзоскелета с мигающим красным цветом в отказавшем датчике, синим – работающие датчики силы.
Отказ двухдатчикового управления: привод автоматом перейдет в однодатчиковое управление. Каждый датчик работает в обоих режимах: 2 датчика на сгибатель + 2 датчика на разгибатель + голосование датчиков с алгоритмом подсчета коэффициента достоверности каждого канала дублирования = 4-кратное дублирование датчиков экзоскелета.
Пользователь ставит диапазон приоритета дозировки силы тактильных матриц кисти экзоскелета: работа с хрупкими, непрочными предметами. Диапазон превышен: приоритет уйдет в канал «сила в тросах».
Выбор графика усиления раздельно в координатах XYZ: усиление вверх больше чем в горизонтали. Быстрый рост усиления до максимума у границы предельного поднимаемого экзоскелетом веса.
Прогрессивное усиление безопасно окружающим, точно дозирует малую силу, поднимет тяжелый груз:
экзоскелет поднимает до 4кг – пропорциональное усиление 1
экзоскелет поднимает десятки килограммов – усиление по вертикали 2-5, по горизонтали 1,1 в направлении действия сгибателей-разгибателей руки, по горизонтали 1,3 при движении вытянутой руки вбок.
Больше вес – больше усиление: экзоскелет не повредит самолет, ставя ракеты при бомбежке аэродрома. 5-кратное усиление первых 0,02сек с нулевого ускорения (или реверс) движения привода уменьшает задержку управления.
Силовая обратная связь передает 4 цифры: угол + угловая скорость + сила + скорость роста силы. Больше скорость роста силы – больше коэффициент усиления.
Пользователь экзоскелета на экране эквалайзером силы (10 диапазонов скорости роста силы) установит коэффициенты дополнительного усиления от скорости роста силы в датчике. Переключение эквалайзера в режим фильтрации частотных полос вибраций, ударных ускорений пальцев, рук, ног, туловища.
Чем больше скорость роста силы, угловая скорость, тем больше частота опроса датчиков угла, силы. Чем больше угловая скорость, тем больше софт увеличит (таблицами решений) цифру диапазона рассогласования (несовпадения) углов обратной связи для уменьшения задержки управления экзоскелетом.
Чем больше величина силы (скорость её роста), тем больше софт увеличит диапазон рассогласования (несовпадения) углов обратной связи для уменьшения задержки управления экзоскелетом.
Диапазон рассогласования углов обратной связи мал – экзоскелет точнее, диапазон рассогласования углов больше – экзоскелет быстрее, сильнее.
Софт ставит диапазон рассогласования (несовпадения) сил в зависимость от величины силы (скорости её роста) по балансу (настройка колесиком) «точность – мощность», по режимам работы: сапер, сварщик…
По угловой скорости софт прогнозирует изменение углов для уменьшения задержки управления экзоскелетом.
Электродистанционный интерфейс экзоскелета снимет ограничения размеров, силы, скорости экзоскелета, повысит безопасность работы человека. Герметичный электродистанционный интерфейс: герметичный отсек (гермоотсек) с экзоскелетами рук, ног человека соединен с экзоскелетом разъемом кабеля: хватит 2 провода на обратную связь, энергоподачу. Нет механических уплотнений движущихся деталей, герметичных соединений трубопроводов.
Космонавт, водолаз через шлюз входит в гермоотсек, герметизирует дверцы шлюза и гермоотсека экзоскелета, электрозамками отсоединит экзоскелет от шлюза, работает в экзоскелете в шлеме кругового обзора. Гермоотсек имеет пружинную подвеску в 3-х осях на случай падения экзоскелета.
Гермоотсек экзоскелета защищен от космических лучей, солнечных бурь, от нейтронов, от рентгеновского, гамма излучений термоядерных взрывов так, как защищают от радиации близких атомных взрывов борткомпьютеры ядерных ракет: покрытие сплава изотопов металлов гадолиний-157Gd, эрбий-167Er. Внешний слой радиационной защиты: композит с арамид-волокна.
Герметичный электродистанционный интерфейс экзоскелета защитит человека от вакуума, от плотных горячих атмосфер планет типа Венеры; от давления жидкой среды типа предполагаемого океана (фары, погружение сквозь лед с горячим радиоизотопным или атомным реактором на гусеницах внизу на длинном трос-кабеле) Европы (спутник Юпитера); пожарного и спасателя от горячей, ядовитой внешней среды горящих химических, атомных предприятий; водолаза от давления предельных глубин океана; солдата от отравляющих газов, радиоактивной внешней среды…
Поскольку гермоотсек электродистанционного экзоскелета имеет большой объем (смещая центр масс экзоскелета), управляющие экзоскелеты рук, ног человека передают углы рукам, ногам экзоскелета в пропорции 25%, 33%, 50%. Рука (нога) человека дает только 25% углового перемещения, двигая руку (ногу) экзоскелета на 100%. Это позволяет сделать гермоотсек экзоскелета примерно вдвое компактнее.
Пружинная прогрессивная подвеска бронированного гермоотсека защитит человека от импульса снарядов противника.
Чуть выше середины туловища экзоскелета двухвальный бесшумный газотурбиннный двигатель. Оси турбин горизонтальны, параллельны.
Нижняя турбина-1 в нижней части туловища экзоскелета, верхняя турбина-2 в верхней части.
На валу каждой турбины слева (с точки зрения пользователя) компрессор. Воздух сжимает нижний двухступенчатый центробежный компрессор-1, дожимает верхний двухступенчатый компрессор-2. Сжатый компрессор-2 воздух идет в камеру сгорания, затем последовательно через турбину-1 и турбину-2.
После запуска микротурбина всегда на постоянных оборотах для бесшумности противофазного глушителя. Меняется только момент вала за счет дроселирования входа центробежного (не боится помпажа) компрессора, сопла турбины. Функцию трансмиссии выполнят энергия маховиков привода + передача «винт – гайка скольжения».
Выхлопная труба микротурбины проходит спереди туловища вверх внутри левой трубы передней дуги безопасности экзоскелета. В правой трубе: воздухозаборник.
Экзоскелет бегает по плечи в воде. Вода залила воздухозаборник: датчик воды отключит питание микротурбины, клапаны закроют воздухозаборник, затем после вакуума выхлопную трубу. Инерция вращающихся в вакууме двигателя с маховиком до 10мин (2мин без вакуума под водой) двигает экзоскелет.
Воздух с фильтра идет двигателю в зазорах электромагнитных муфт сцепления, охлаждая их: теплопроводность газов постоянна до 0,01атм. Часть воздуха компрессора двигателя, пройдя радиатор крутит турбину его вентилятора.
Воздух после радиатора, часть потока вентилятора (регулирование температуры) до радиатора: это воздух системы вентиляции зажимов экзоскелета
ПРИВОД ЭКЗОСКЕЛЕТА: турбина-2, компрессор-2 на одном валу сверху туловища экзоскелета. Их общий вал справа крутит маховик-РУКА●ПРАВАЯ, слева маховик-РУКА●ЛЕВАЯ.
Весь этот длинный вал (БОЛЬШОЙ-МАХОВИК-РУК) вращается в роликоподшипниках с трубчатыми упругими роликами. Роликоподшипники имеют одинаковый посадочный диаметр, равный диаметру крыльчатки компрессора, турбины.
Внутри маховик-РУКА●ПРАВАЯ неподвижная труба-Н с упорной (упорная поверхность резьбы перпендикулярна оси маховика-РУКА●ПРАВАЯ) резьбой с 12 разрезными медными гайками скольжения с несмачиваемой (чтоб не обледенело зимой) водой твердой смазкой
АВТОМАТ ОБНУЛЕНИЯ РАДИАЛЬНОГО ЗАЗОРА: у гаек разрез с системой пружинящего (соответствующий медный сплав) изгиба гайки по разрезу чтоб убрать радиальный зазор, иначе резьбу сорвет осевая сила.
На внешней стороне гайки медный ротор типа Беличье колесо. Гайки двигаясь вдоль своей оси по резьбе двигают тросы правой руки экзоскелета.
Вращающийся правый маховик разделен по длине на 12 секций с трехфазными обмотками. В режиме муфты сцепления в обмотках маховика постоянный ток, но в соседних обмотках ток противоположного направления. Постоянный ток идет с кабеля постоянного тока электромотор-маховика. Маховик индукцией вращает вращает гайку в резьбе, толкая невращающееся но скользящее по торцевой поверхности гайки кольцо вдоль оси гайки.
При работе в режиме реверс (возврат троса в нулевое положение) обмотки электромотор-маховика создают вращающееся назад электромагнитное поле, которое вращает ротор в обратную сторону.
Невращающееся кольцо – упорный подшипник скольжения передающий силу осевого перемещения гайки на трос шкива 2D-шарнира плеча экзоскелета. Кольцо имеет 2 противолежащих радиальных выступа внутри кольца. Эти выступы через продольные короткие (по длине осевого хода гайки) прорези неподвижной трубы-Н двумя тросами (прикреплены к выступам кольца внутри неподвижной трубы-Н) поворачивают шкив плечевого 2D-шарнира правой руки экзоскелета.
При уменьшении нагрузки на трос в маховике создается вращающееся назад магнитное поле, вращающее гайку в обратную сторону в нулевое положение. Задний ход гайки – кольцо идет назад. У привода короткий ход тросов, в новой версии длинный ход.
Гайки правого маховика двигают 12 тросами правых рук (4 пальца) экзоскелета. Мощность маховика можно концентрировать в 1 трос.
В экзоскелетах работающих в среде с мелкой абразивной пылью, в приводе вместо тросов цепи. Цепи менее чувствительны к абразивной среде
ПРИВОД НОГИ: расположенная снизу туловища экзоскелета турбина-1, компрессор-1 на одном валу. Их общий горизонтальный вал справа крутит маховик-НОГА●ПРАВАЯ (двигает 7 тросами правой ноги экзоскелета), слева маховик-НОГА●ЛЕВАЯ (двигает 7 тросами левой ноги экзоскелета).
Весь этот длинный вал (БОЛЬШОЙ-МАХОВИК-НОГ) вращается в роликоподшипниках с трубчатыми упругими роликами. Роликоподшипники имеют одинаковый посадочный диаметр, равный диаметру крыльчатки компрессора, турбины.
Внутри маховика-НОГА●ЛЕВАЯ неподвижная труба-БОЛЬШАЯ●ЛЕВАЯ●НИЖНЯЯ с упорной резьбой с 7 медными гайками скольжения с несмачиваемой водой твердой смазкой. На внешней стороне гайки ротор типа Беличье колесо. Вращающийся маховик-НОГА●ЛЕВАЯ разделен по длине на 7 секций с трехфазными обмотками.
Вращающееся магнитное поле вращает гайку по резьбе, толкая невращающуюся, но скользящую по торцевой поверхности гайки кольцо вдоль оси гайки. Кольцо – упорный подшипник скольжения, передающий силу осевого перемещения гайки на трос шкива шарнира ноги экзоскелета. Кольцо имеет 2 противолежащих радиальных выступа внутри кольца.
Эти выступы через продольные короткие (по длине осевого хода гайки) прорези неподвижной трубы-БОЛЬШАЯ●ЛЕВАЯ●НИЖНЯЯ двумя тросами (прикреплены к выступам внутри трубы-БОЛЬШАЯ●ЛЕВАЯ●НИЖНЯЯ) поворачивают шкив ноги экзоскелета.
У каждой из 7 трехфазных обмоток маховика-НОГА●ЛЕВАЯ свой колебательный контур, своя несущая частота сигнала управления с коаксиального (защита от наводок) сигнального кабеля, двигающая 7 тросами левой ноги экзоскелета. Мощность маховика можно концентрировать в 1 трос.
Выходные тросы привода ног экзоскелета вращают шкивы центральной оси горизонтального поперечного рычага тазобедренного балансира, в концах которого на шарнирах обе ноги экзоскелета.
Тросы через шкивы центральной оси горизонтального поперечного рычага тазобедренного балансира экзоскелета, идут в шкивы на концах горизонтального поперечного рычага тазобедренного балансира экзоскелета.
Ниже осей шкивов вплотную расположены шкивы с горизонтальной поперечной осью, тросы с которых идут в шкивы оси (ось параллельна) коленного шарнира экзоскелета. Далее тросы идут в шкивы оси (ось параллельна) нижнего шарнира голени экзоскелета. Далее тросы идут до ступней экзоскелета.
Все шкивы экзоскелета в подшипниках скольжения. Соберет в единую конструкцию верхнюю (нижнюю тоже) часть двигателя с приводом проходящий сквозь их оси трубчатый неподвижный болт. Кинематика экзоскелета оптимизирована на унификацию электромагнитных муфт
Подвеска носка ступни экзоскелета имеют общий (с рычажным балансиром) амортизирующий трос с подпружиненным роликом в туловище. Спереди ступни бампер с прогрессивной подвеской. Для плавности приземления радиус (вертикальная ось) закругление носка, пятки ступни экзоскелета – 30% длины ступни
ВИБРАЦИОННЫЙ СИГНАЛИЗАТОР ВЕКТОРА СКОЛЬЖЕНИЯ СТУПНИ
На наклонных скользких поверхностях человек не чувствует скольжения ног экзоскелета. Сигнализатор вектора скольжения передает человеку направление скольжения ступни экзоскелета. Ударник-1 серией ударов в наковальню дает продольное скольжение носка ступни экзоскелета, ударник-2 – поперечное скольжение носка, ударник-3 – поперечное скольжение пятки. Ударники работают синхронно.
Ступня экзоскелета скользит вправо: молот (двигает правая обмотка) бьёт правую наковальню (малошумный сплав, шумоизолирующая подвеска). Сила ударов пропорциональна скорости скольжения ступни. Пружина возвращает молот назад. Повтор цикла пока ступня скользит вправо.
У каждого ударника 2 наковальни чтоб передавать удар в одну или в противоположную сторону. Для увеличения частоты колебаний винтовые приводы ударника по сигналу софта приближают друг к другу обе наковальни, сжимая обе пружины. Ход молота уменьшается, частота ударов увеличивается.
Сигнализатор передает только медленное движение ступни. Пороги скорости включения сигнализатора зависят от углов продольного и поперечного наклона нижней плоскости ступни.
В носке ступни экзоскелета инерциальные датчики продольного, поперечного линейного перемещения ступни. В пятке инерциальный датчик поперечного перемещения пятки. Они дают 3 канала: поперечное, продольное скольжение носка ступни + поперечное скольжение пятки.
Без опоры ступни экзоскелета на пятку нет сигнала с пятки. Инерциальные датчики дублируются пьезомикрофонами.
Кисть экзоскелета: 4 пальца
СОФТ: по угловой скорости и скорости роста сил, регулируя взаимное противодействие тросов сгибателей, разгибателей рук, ног уберет все зазоры механизмов, компенсирует упругость деталей экзоскелета.
Софт отрицательной обратной связью «датчик ускорения троса – электромагнитная муфта» держит постоянным (рост ресурса тросов) натяжение тросов, стабилизируя упругость экзоскелета, уменьшая задержку управления.
Датчиков силы тросов колебания сигнала 2,5-10Hz гасит фильтр паразитных колебаний, управляя муфтами сцепления.
Софт дает сигналам отрицательного ускорения больше усиления, затухания чем сигналам положительного ускорения: установки графиков усиления, затухания датчиков.
По акустическому портрету кашля софт на время блокирует работу списка датчиков.
Наклоненный вниз носок ступни экзоскелета задел землю – софт мгновенно поднимет носок, ногу: человек блокирует это наклоняя носок ступни вниз.
Действие силы тяжести компенсируют пружины экзоскелетов рук, ног. Вес рук, ног экзоскелета компенсируют пружины. Сила пружин ног экзоскелета в 2 раза, пружин рук в 1,5 раза превышает вес экзоскелета.
С цифры обратной связи софт вычтет цифру датчика силы пружины по синусу 3D-угла наклона от вертикали с вычисленной, по цифрам датчиков ускорения, поправкой на закон-2 Ньютона
АВТОМАТ КОРРЕКЦИИ ПРУЖИН: поднимая с земли груз экзоскелет взвешивает его тензодатчиком силы – приводы (пневмотурбина + винт-гайка) компенсирующих пружин уравновесят вес груза, в разы уменьшая необходимую мощность экзоскелета
ЦЕПНОЙ ЗАЖИМ РАВНОМЕРНОГО ПРИЖИМА: рычаг-звенья-1-2-3-4-5-6 цепного зажима зажмут руку, (ногу, таз, туловище) до стандарта силы в тросе. Большой диаметр секторного шкива троса у рычаг-звена-1. У рычаг-звена-2 диаметр секторного шкива троса меньше в столько раз, в сколько суммарная длина рычаг-звеньев-1-2 больше длины рычаг-звена-1.
Аналогичное отношение общей длины к диаметрам секторных шкивов остальных рычаг-звеньев дает одинаковую силу прижима каждого рычаг-звена цепного зажима к руке (ноге) одним общим тросом (разжимает рычаг-звенья пружина через 2-й общий трос).
Цепной зажим равномерного прижима с равной силой зажимает все точки обхватываемой поверхности любой формы. Привод двигает общий трос через пружинный рычажный механизм с прогрессивной характеристикой (типа задней подвески кроссового мотоцикла) силы прижима. Каждое рычаг-звено своими надувными сегментами обхватит руку (ногу) любого размера.
Обвившись вокруг руки (ноги) цепной зажим равномерного прижима обхватит балку экзоскелета. Зубья звеньев цепного зажима входя в зубья в балке зажима фиксирует руку (ногу) человека. Получается жесткий круговой обхват руки (ноги) любой формы цепным зажимом равномерного прижима.
Жесткий круговой обхват руки (ноги) любой формы + высокое давление в надувных сегментах дают минимальную задержку управления экзоскелетом.
Надувные зажимы нижней части локтя имеют функцию свободы вращения зажатой руки.
Локти человека привод установит горизонтально вперед. Человек сел в седло. Ставит ноги в экзоскелеты ступней, руки в экзоскелеты локтя, как на подлокотник.
Стандартом силы датчика зажимной рамы локтя привод установит длину экзоскелета предплечья. Предплечье зажмет у суставов. Затем стандартом силы датчика экзоскелета предплечья привод установит длину экзоскелета локтя. Локоть зажмет у суставов.
Привод сгибает углом к плоскости ладони экзоскелеты пальцев. По датчикам зажимных рам фаланг-1 пальцев привод установит длину экзоскелета ладони. Зажимная рама зажмет плоскость ладони.
Экзоскелеты туловища, таза расположены спереди человека. Левый цепной зажим экзоскелета таза сгибаясь вправо-вниз углом 30° зажмет таз сбоку, спереди верхней левой боковой кости таза по стандарту силы в тросе. Аналогично справа.
Стандартом силы 2-х плечевых датчиков экзоскелета туловища привод установит его длину. Цепные зажимы экзоскелета туловища зажмут человека в подмышках по бокам, сзади, плечи сверху, сзади. Цепные зажимы в подмышках концами соединятся между собой зубьями.
Ступня в башмаке (закрывает ступню сверху, по бокам) экзоскелета ступни. Привод экзоскелета ступни башмаком жмет ступню к заднему упору пятки по стандарту силы его датчика. Привод зажмет голень у суставов.
Стандартом силы датчика (у колена сзади) экзоскелета голени привод установит длину экзоскелета бедра. Привод зажмет бедро у суставов.
Гермоотсек экзоскелетчика крепится сзади посередине к низу туловища экзоскелета. Экзоскелет сидит с вертикальным туловищем, поджав к плечам согнутые колени для минимума стояночной площади. Человек вставит чип-ключ, откроет внутрь дверцу слева экзоскелета. Человек входит, повернет направо к зажимной раме туловища. Справа сзади люк открывается внутрь
СТАРТЕРНЫЙ ЗАПУСК ЭКЗОСКЕЛЕТА: человек включит стартер двигателя экзоскелета. Фиксатор блокирует вращение правого нижнего маховика экзоскелета. Через вращающийся трансформатор правого нижнего маховика подается ток в трехфазную обмотку генератора маховика, которая раскручивает правый турбокомпрессор двигателя с закрытым (для вакуума) входом.
После раскрутки снимается блокировка вращения маховика, открывается вход воздуха в правый турбокомпрессор. Сжатый им воздух подается (работа клапанов) в камеру сгорания правой турбины. Она начинает работать, её компрессор дает воздух в камеру сгорания (работа клапанов) левой турбины: заводится левая турбина.
После плавного переключения клапанов камеры сгорания обеих турбин работают с воздухом с правого компрессора, пока не наберет обороты левая турбина. Затем воздух (работа клапанов) с выхода правого компрессора идет на вход левого компрессора: он дожимает воздух. Далее камеры сгорания обеих турбин (работа клапанов) работают с воздухом с выхода левого компрессора.
Локти человека привод установит горизонтально вперед. Человек сел в седло. Ставит ноги в зажимные рамы ступней, руки в зажимные рамы локтя, как на подлокотник. Все приводы надувных зажимов рук, ног, туловища: пневмотурбина + винт-гайка. Пневмотурбины берут воздух системы вентиляции надувных зажимов
Привод на голову человека опустит
ШЛЕМ: сферический 3D-экран радиусом 30см. Лобового стекла нет: сферическая 3D-картинка (отображение диагностики систем экзоскелета) с стереокамер (с управляемыми защитными шторками с уплотнениями) адаптивного (переключение 12 телекамер поворотом головы) кругового обзора. В 3D-экране вырезы для плеч. 3D-экран показывает нижнюю полусферу возле ног экзлскелета для безопасного спуска по лестницам.
Шлем фиксируется в экзоскелете туловища. Сверху экзоскелета 12 ракурсных телекамеры. При повороте головы человека гиростабилизированное переключение (по горизонтальному, вертикальному углам) ракурсных телекамер, строчек, пикселей их матриц: это дает постоянное положение пикселей фона видео для максимума быстрого сжатия видео при передаче в другие экзоскелеты.
Пленоптические (матрица линз. чисто программная фокусировка видекамеры) телекамеры экзоскелета дают 3D-видеосигнал сфокусированный софтом на 100% глубины резкости на объектах: управлять фокусом не нужно. Вариант: на каждый фокусный диапазон своя пара стереокамер: разнофокусные картинки соединит в одну софт.
Светофильтры от ослепления на всех телекамерах, инфракрасные стереокамеры софтом совмещены с направленными микрофонами. Голосовое управление экзоскелетом
ОБЪЕМНЫЙ ЗВУК: у экзоскелета 3D-звук чтоб не попасть под машину едущей сбоку или сзади, слышать все звуки снизу чтоб не свалиться вниз.
Падение экзоскелета: судебный процесс (ущерб) от которого защитит шлем с аудиосистемой 3D-звука передающей векторы прихода звуков.
3D-звук: 4 динамика в вертикальной плоскости спереди + 4 динамика в вертикальной плоскости сзади дают любой вектор прихода звука: можно сделать в наушниках с 8 динамиками: 4 в каждом ухе.
Экзоскелет имеет один 3D-микрофон слева на высоте головы пешехода + один 3D-микрофон справа на высоте головы пешехода. Или два совмещенных стереомикрофона слева + два совмещенных стереомикрофона справа. Дальность источника звука по разности амплитуд (время прихода звука до микрофонов) и проценту (сравнение с шаблоном звука) энергии верхних частот в сигнале.
Шлем электродистанционного экзоскелета жестко закреплен в экзоскелета туловища, неподвижен относительно головы человека. У человека одно колесико громкости и три колесика баланса (баланс звука по поперечной горизонтали + баланс звука по вертикали + баланс звука «передняя полусфера звука – задняя полусфера звука»).
Направление движения колесиков совпадает с направлением регулировки баланса звука и роста уровня звука. Эта схема управления быстро выделяет колесиками один вектор прихода звука для быстрой реакции экзоскелета на внешнюю среду.
Вариант-2: джойстик выделения направления звука с кнопкой «реверс вектора прихода звука» с тактильным различением векторов звуковых полусфер (верхняя-нижняя или правая-левая). Колесики громкости, баланса звука сбоку экзоскелета туловища
ВОЕННЫЙ ЭКЗОСКЕЛЕТ: внешняя картинка горизонтальными лучами идет на металлическое зеркало: высокотеплопроводный сверхтвердый сплав.
После зеркала лучи идут в кристалл-F. Отраженные от зеркальной поверхности кристалла-F под углом 45° лучи идут в телекамеру. Противник включил лазер выжигающий матрицу телекамеры – кристалл-F в котором лазерный импульс сорвал с орбит оптические по энергии перехода электроны, становится прозрачным пропуская насквозь всю энергию лазера. Действие лазера прекратилось – телекамеры прозреют после охлаждения кристалла-F.
2D-управление лазерным целеуказателем поворотами головы в шлеме. В шлеме картинка синтезирована с видеосигнала узкоугольной телекамеры прицела пулемета + видеосигнал круговых широкоугольных телекамер.
Синтезированная из всех гиростабилизированных на общей платформе (или угол-синхронная гиростабилизация) телекамер картинка с зумом (интерфейс зума: движение челюсти) дает круговой обзор городского боя. Софт: установки области локального зума картинки шлема, цвет, толщина линии очерчивающей область локального зума.
Экзоскелетчик в бою улучшит распознаваемость картинки шлема вырезая видеоэквалайзером с голосовым управлением зашумленные полосы частот видеосигнала.
В шлем вывод картинки с воздушных, наземных, подводных роботов, экзоскелетов. С закрытой позиции экзоскелетчик с миномета выстрелит вверх гиростабилизированную телекамеру-наводчик с гелиевым аэростатом. По её картинке работает миномет.
Опции: в тыльной стороне ладони экзоскелета телекамера с управлением голосом, жестами. Для облегчения захвата некоторых предметов кисть экзоскелета с контактно-вакуумными (давление предмета откроет вакуумный клапан) присосками.
Человек встает с экзоскелетом, работает. Конец работы: человек жмет красную кнопку. Приводы зажимных рам освободят человека. Экзоскелет автоматически сядет с вертикальным туловищем поджав согнутые колени к плечам, фиксируется.
Защита от падения: софт пружинами выстрелит с стороны падения дуги безопасности с прогрессивной пружинной подвеской + прогрессивная 3D-подвеска гермоотсека + внешние кольчужные подушки безопасности.
Гермоотсек экзоскелетчика без изменений подключат стандартным электроразъемом к экзоскелету других моделей.
Экзоскелет может работать с удаленного костюма телеприсутствия. Опция: режим «автопилот»: гиростабилизированный (не укачивает) гермоотсек.
У экзоскелета криптозащищенные рация, мобильный телефон, аварийный ответный (ответ по розыскному импульсу) радиомаяк.
Каналы обратной связи 4-кратно дублированы в разных принципах работы. Провода экзоскелета коаксиальные: не откажут от луча мощного радара.
Газотурбинный двигатель экзоскелета в 2 раза легче, компактнее поршневого двигателя, 10 раз быстрее запуск в мороз -40°С, в разы надежнее, нет вибрации. Для режима ожидания (работа сетевой информационной системы с датчиками, приводов бесшумной точной наводки оружия, кондиционера, отопителя, стартер…) вспомогательная (экономия топлива + инерционный стартер) микротурбина.
Погружение в воду: двигатель закроет вход, выход для переключения с наземного на гидрореагирующее топливо: окислитель вода.
Пожар: автоматическая система пожаротушения экзоскелета при пожаре в радиаторе кондиционера охладив выхлоп-газы, ими тушит пожар: датчики диагностируют пожар, его конец.
Взрывобезопасный (заполнен продырявленными сотами) топливный бак с наддувом охлажденными выхлопными газами от системы дожигания кислорода. Баки-2-3 размером с телефон с эластичной мембраной (сильфоном), разделяющей выхлопные газы наддува бака и топливо.
Баки-2-3 поочередно заправляет система подачи топлива, дает топливо двигателю в любом положении. Резервная пиротехническая подача с обратным клапаном.
Силовые балки экзоскелета: болванки авиационного пенопласта (пенометал, пеностекло) продольно-перпендикулярно обмотаны углеволокном в эпоксидке. Балка топливный бак: продырявленные (движение топлива) соты, обмотанные углеволокном.
Силовые балки части гигантских экзоскелетов: цилиндрические, конические надувные конструкции наполнены гелием для снижения веса за счет закона Архимеда. У части гигантских экзоскелетов авиационные парашютные катапульты.
Для питья вода с выхода турбодетандера кондиционера.
Тросы разделены на отрезки с быстросъемными пружинными замками (инерционная 3D-балансировка замка) в промежутке между шкивами. Поврежден трос, меняем отрезок троса.
Конец работы: человек жмет красную кнопку. Экзоскелет становится вертикально на горизонтальные голени, фиксируется. Приводы зажимных рам освободят человека.
Экзоскелет ходит по минным полям тяжелыми противоминными ходулями. На голенях у колен на прогрессивной подвеске хорошо обтекаемые снизу газами взрыва решетки: защита от прыгающих мин. Защищенность от мин лучше (квадрат расстояния ударной волны) танка.
Вращающиеся массы защитят человека, боезапас от снарядов, ракет с кумулятивной боеголовкой, размазав веером вбок гиперзвуковую кумулятивную струю. Высокооборотные из идеально отполированного сверхтвердого материала дисковые маховики размажут кумулятивную струю.
Мощные экзоскелеты помогут сверхтяжелым танкам проехать через мосты: снимут с танка броню, башню, боекомплект… Скелет танка проедет мост. За ним экзоскелеты перевезут в прицепах снятое с танка барахло, вернут в танк. После попадания снаряда в танк, повторную калибровку датчиков наводки пушки на цель софт сделает двумя лазерами совмещенными с стереотелекамерами с широкой стереобазой.
В военном экзоскелете противотросовые двухсторонние (общий резак: 2 лезвия сверху, снизу) ножницы в голенях, бедрах, локтях: трос идет в лезвие резака при сгибании ноги. Общий резак (сплюснутая трапеция) движется в параллелограммной 2-рычажной подвеске перпендикулярно оси бедра (голени, локтя), режет трос.
Гиперзвуковая газовая струя мины обтекает противоминные ступни, голени, обтекаемые решетки (от прыгающих мин) у колен экзоскелета.
Виды электродистанционных экзоскелетов: сварочный (вакуумный цех), термический, шахтерский, водолазный, глубоководный, спасательный, десантно-космический, космический экзоскелеты. Ожидается превышение оборота рынка экзоскелетов электродистанционных над суммарным рынком остальных видов мобильных экзоскелетов из-за их ограничений грузоподъемности, функциональности.
4 года (с 2013г) вырезали с этой статьи, с моих 2-х компьютеров и флешек описание стартерного запуска экзоскелета, вредительски меняли текст, убирали деление на абзацы
ЭКЗОСКЕЛЕТ GE2.0 (статье 20 раз вредили) Мощность человека 0,3кВт, экзоскелета 5кВт. Экзоскелет разведчика (спортсмена) на 10кВт за счет инерции маховика, разгрузки ног пружинами (2-3 раза сильнее веса экзоскелета) прыгает вверх 6м на крышу. Мощный газотурбинный гоночный экзоскелет: скорость 200км/ч (больше частота, длина шага).
Вес человека держат ступни экзоскелета, могут держать седло с прогрессивной 2D-подвеской (ход 5см верх-вниз, 2см вперед-назад) и надувные опоры подмышек с прогрессивной подвеской: ход 1,5см.
Нагрузки скелета человека в разы снизит спринтерская техника бега согнутыми ногами с приземлением на носки ступней, алгоритмы плавного перемещения софтом центра масс экзоскелета поправками сигналов привода.
Экзоскелет с мгновенной жесткой фиксацией всех приводов, превращающей экзоскелет в жесткую статую, рукой пробьет бетонный забор. Человек пристегнут к экзоскелету сзади через параллелограммные рычаги, шкив-тросовые механизмы.
С двигателем 5-500кВт андроидная (переднеприводная) схема экзоскелета 1,5 раза легче заднеприводной. В обычном экзоскелете человека расплющит в мокрое пятно об столб, препятствие в темноте (фары ближнего, дальнего света), споткнувшись на полной скорости.
Экзоскелет спереди человека, а не по бокам-сзади: 1,5 раза меньше лобовое сечение, вдвое толще лобовая броня (часть конструкции привода), быстрее движение напролом (проламывание бетонных стен, деревьев), полной скорости бег без касания сквозь дверной проем (спецназ), бег в узкой лестнице, в воде по плечи
Шлем: человек в круговом экране шлема через 10 стереокамер экзоскелета. Стереокамеры показывают широкоугольную на угол 180° картинку и нижнюю полусферу – безопасный спуск по лестницам. Вариант без шлема: нижнюю полусферу показывает экран на капоте экзоскелета. Выше лобовое стекло. Сверху верхняя дуга безопасности, в которой лобовое стекло с стеклоочистителями
Софт: человек свёл руки: уперлись в корпус экзоскелета, жмёт руками на корпус, софт продолжит сближать руки экзоскелета, сообщая о угловой скорости частотой и направлением вектора вибрации.
Человек поднял руки экзоскелета вверх: софт приводом разведет руки человека по бокам от рук экзоскелета чтоб не уперлись. Софт экзоскелета защитит от подобных столкновений.
Нога человека двигаясь вверх уперлась в ногу экзоскелета: софт по датчику силы продолжит двигать вверх ногу экзоскелета.
Датчиков силы тросов колебания сигнала 2,5-10Hz гасит (муфтами сцепления) фильтр паразитных колебаний.
Софт дает сигналам отрицательного ускорения больше усиления, затухания чем сигналам положительного ускорения: установки графиков усиления, затухания датчиков.
Наклоненный вниз носок ступни экзоскелета задел землю – софт мгновенно поднимет носок, ногу: человек блокирует это наклоняя носок ступни вниз.
Вес рук, ног экзоскелета компенсируют пружины. Сила пружин ног экзоскелета в 1,5 раза больше веса экзоскелета, сила пружин рук в 1,5 раза больше их веса. С цифры обратной связи софт вычтет цифру датчика силы пружины по синусу 3D-угла наклона от вертикали с вычисленной, по цифрам датчиков ускорения, поправкой на закон-2 Ньютона.
Верхняя часть туловища экзоскелета заканчивается на уровне плеч человека. С началом движения привод поднимает, фиксирует переднюю дугу безопасности, защищающую лицо от веток деревьев. С стороны падения датчики пружинами выстрелят дуги безопасности с прогрессивной пружинной подвеской.
Софт регулируя взаимное противодействие тросов сгибателей, разгибателей рук, ног уберет все зазоры механизмов, компенсирует упругость экзоскелета.
Чуть выше середины туловища экзоскелета двухвальная бесшумная микротурбина. Оси турбин горизонтальны, параллельны. Нижняя турбина-1 в нижней части туловища экзоскелета, верхняя турбина-2 в верхней части. На валу каждой турбины слева (с точки зрения пользователя) компрессор.
Воздух сжимает нижний двухступенчатый центробежный компрессор-1, дожимает верхний двухступенчатый компрессор-2. Сжатый компрессор-2 воздух идет в камеру сгорания, затем последовательно через турбину-1 и турбину-2.
После запуска микротурбина работает на постоянных оборотах для бесшумности противофазного глушителя. Меняется только момент вала за счет дроселирования входа центробежного (не боится помпажа) компрессора, сопла турбины. Трансмиссия: энергия маховиков привода + передача «винт – гайка скольжения».
Выхлопная труба микротурбины проходит спереди туловища вверх внутри левой трубы передней дуги безопасности экзоскелета. В правой трубе: воздухозаборник. Экзоскелет бегает по плечи в воде.
Вода залила воздухозаборник: датчик воды отключит питание микротурбины, клапаны закроют воздухозаборник, затем выхлопную трубу. Инерция маховика двигает под водой экзоскелет.
Воздух с фильтра идет двигателю в зазорах электромагнитных муфт сцепления, охлаждая их: теплопроводность газов постоянна до 0,01атм. Часть воздуха компрессора двигателя, пройдя радиатор крутит турбину его вентилятора.
Воздух после радиатора, часть потока вентилятора (регулирование температуры) до радиатора: это воздух системы вентиляции зажимов зажимных рам экзоскелета
Привод экзоскелета: турбина-2, компрессор-2 на одном валу сверху туловища экзоскелета. Их общий вал справа крутит маховик-РУКА●ПРАВАЯ, слева маховик-РУКА●ЛЕВАЯ.
Весь этот длинный вал (БОЛЬШОЙ-МАХОВИК-РУК) вращается в роликоподшипниках с трубчатыми упругими роликами. Роликоподшипники имеют одинаковый посадочный диаметр, равный диаметру крыльчатки компрессора, турбины.
Внутри маховика-РУКА●ПРАВАЯ неподвижная труба-Н с упорной (упорная поверхность резьбы перпендикулярна оси маховика-РУКА●ПРАВАЯ) резьбой с 12 разрезными медными гайками скольжения с несмачиваемой (чтоб не обледенело зимой) водой твердой смазкой
Автомат обнуления зазора: у гаек разрез с системой пружинящего (соответствующий медный сплав) изгиба гайки по разрезу чтоб убрать радиальный зазор, иначе резьбу сорвет осевая сила.
На внешней стороне гайки медный ротор типа Беличье колесо. Гайки двигаясь вдоль своей оси по резьбе двигают тросы правой руки экзоскелета.
Вращающийся правый маховик разделен по длине на 12 секций с трехфазными обмотками. В режиме муфты сцепления в обмотках маховика постоянный ток, но в соседних обмотках ток противоположного направления. Постоянный ток идет с кабеля постоянного тока электромотор-маховика. Маховик индукцией вращает вращает гайку в резьбе, толкая невращающееся но скользящее по торцевой поверхности гайки кольцо вдоль оси гайки.
При работе в режиме реверс (возврат троса в нулевое положение) обмотки электромотор-маховика создают вращающееся назад электромагнитное поле, которое вращает ротор в обратную сторону.
Невращающееся кольцо – упорный подшипник скольжения передающий силу осевого перемещения гайки на трос шкива 2D-шарнира плеча экзоскелета. Кольцо имеет 2 противолежащих радиальных выступа внутри кольца. Эти выступы через продольные короткие (по длине осевого хода гайки) прорези неподвижной трубы-Н двумя тросами (прикреплены к выступам кольца внутри неподвижной трубы-Н) поворачивают шкив плечевого 2D-шарнира правой руки экзоскелета.
При уменьшении нагрузки на трос в маховике создается вращающееся назад магнитное поле, вращающее гайку в обратную сторону в нулевое положение. Задний ход гайки – кольцо идет назад. Гайки правого маховика двигают 12 тросами правых рук (4 пальца), ног экзоскелета. Мощность маховика можно концентрировать в 1 трос
Привод ноги: расположенная снизу туловища экзоскелета турбина-1, компрессор-1 на одном валу. Их общий горизонтальный вал справа крутит маховик-НОГА●ПРАВАЯ (двигает 7 тросами правой ноги экзоскелета), слева маховик-НОГА●ЛЕВАЯ (двигает 7 тросами левой ноги экзоскелета).
Весь этот длинный вал (БОЛЬШОЙ-МАХОВИК-НОГ) вращается в роликоподшипниках с трубчатыми упругими роликами. Роликоподшипники имеют одинаковый посадочный диаметр, равный диаметру крыльчатки компрессора, турбины.
Внутри маховик-НОГА●ЛЕВАЯ неподвижная труба-БОЛЬШАЯ●ЛЕВАЯ●НИЖНЯЯ с упорной резьбой с 7 медными гайками скольжения с несмачиваемой водой твердой смазкой. На внешней стороне гайки медный ротор типа Беличье колесо.
Вращающийся маховик-НОГА●ЛЕВАЯ разделен по длине на 7 секций с трехфазными обмотками. Обмотки маховика-НОГА●ЛЕВАЯ создают вращающееся магнитное поле, вращающее гайку по резьбе, толкая невращающуюся, но скользящую по торцевой поверхности гайки кольцо вдоль оси гайки. Кольцо – упорный подшипник скольжения, передающий силу осевого перемещения гайки на трос шкива шарнира ноги экзоскелета. Кольцо имеет 2 противолежащих радиальных выступа внутри кольца.
Эти выступы через продольные короткие (по длине осевого хода гайки) прорези неподвижной трубы-БОЛЬШАЯ●ЛЕВАЯ●НИЖНЯЯ двумя тросами (прикреплены к выступам внутри трубы-БОЛЬШАЯ●ЛЕВАЯ●НИЖНЯЯ) поворачивают шкив ноги экзоскелета.
У каждой из 7 трехфазных обмоток маховика-НОГА●ЛЕВАЯ свой колебательный контур, своя несущая частота сигнала управления с коаксиального (защита от наводок) сигнального кабеля, двигающая 7 тросами левой ноги экзоскелета. Мощность маховика можно концентрировать в 1 трос.
Выходные тросы привода ног экзоскелета вращают шкивы центральной оси горизонтального поперечного рычага тазобедренного балансира, в концах которого на шарнирах обе ноги экзоскелета.
Тросы через шкивы центральной оси горизонтального поперечного рычага тазобедренного балансира экзоскелета, идут в шкивы на концах горизонтального поперечного рычага тазобедренного балансира экзоскелета.
Ниже осей шкивов вплотную расположены шкивы с горизонтальной поперечной осью, тросы с которых идут в шкивы оси (ось параллельна) коленного шарнира экзоскелета. Далее тросы идут в шкивы оси (ось параллельна) нижнего шарнира голени экзоскелета. Далее тросы идут до ступней экзоскелета.
Кинематика экзоскелета оптимизирована на унификацию электромагнитных муфт.
Соберет в единую конструкцию верхнюю (нижнюю тоже) часть двигателя с приводом проходящий сквозь их оси трубчатый неподвижный болт
Подвеска носка ступни экзоскелета имеют общий (с рычажным балансиром) амортизирующий трос с подпружиненным роликом в туловище. Спереди ступни бампер с прогрессивной подвеской. Для плавности приземления радиус (вертикальная ось) закругление носка, пятки ступни экзоскелета – 30% длины ступни.
Кисть экзоскелета: 4 пальца.
Сегменты цепных зажимов равномерного прижима рук, ног обхватывают руку, ногу разного размера. Обвившись вокруг руки (ноги) цепной зажим равномерного прижима обхватит балку зажимной рамы. Зубья звеньев цепного зажима входя в зубья в балке зажима фиксирует руку (ногу) человека.
Зажимы нижней части локтя имеют функцию свободы вращения зажатой руки. Стандартом силы датчика зажимной рамы локтя привод установит длину зажимной рамы предплечья. Предплечье зажмет у суставов. Затем стандартом силы датчика зажимной рамы предплечья привод установит длину зажимной рамы локтя. Локоть зажмет у суставов.
Привод сгибает углом к плоскости ладони зажимные рамы пальцев. По датчикам зажимных рам фаланг-1 пальцев привод установит длину зажимной рамы ладони. Зажимная рама зажмет плоскость ладони.
Зажимные рамы туловища, таза расположены спереди человека. Левый цепной зажим зажимной рамы таза сгибаясь вправо-вниз углом 30° зажмет таз сбоку, сзади верхней левой боковой кости таза по стандарту силы в тросе. Аналогично справа.
Стандартом силы 2-х плечевых датчиков зажимной рамы туловища привод установит ее длину. Цепные зажимы зажимной рамы туловища зажмут человека в подмышках по бокам, сзади, плечи сверху, сзади. Цепные зажимы в подмышках концами соединятся между собой зубьями.
Привод зажимной рамы ступни башмаком прижимает ступню к заднему упору пятки по стандарту силы его датчика. Привод зажмет голень у суставов. Стандартом силы датчика (у колена сзади) зажимной рамы голени привод установит длину зажимной рамы бедра. Привод зажмет бедро у суставов.
Стандартом силы датчика (у колена сзади) зажимной рамы голени привод установит длину зажимной рамы бедра. Привод зажмет бедро у суставов.
Туловище экзоскелета соединено с боковыми 2D-шарнирами зажимной рамы туловища человека двумя параллельными продольными рычагами-H. Эти 2 продольных рычага-H 2D-шарнирами соединены с поперечным коромыслом-HТ в центре между ними. В центре поперечного коромысла-HТ 2D-шарнир-HT посередине спереди зажимной рамы туловища.
На продольных рычагах-H датчики угла наклона приводом-Т через механизм-HM двигают верх-вниз 2D-шарнир-T, поддерживая перпендикулярность продольных рычагов-H к вертикали. Массы подвешенные на 2D-шарнир-T полностью уравновешены пружиной привода.
Этот параллелограммный механизм совмещает ось поворота зажимной рамы таза с осью позвоночника человека.
Тазобедренный балансир экзоскелета соединен с боковыми 2D-шарнирами зажимной рамы таза параллельными продольными рычагами-B. Эти 2 продольных рычага-B в центре между ними соединены 2D-шарнирами с поперечным коромыслом-BТ.
В центре поперечного коромысла-BТ 2D-шарнир-BT. Поперечное коромысло-HТ треугольным рычагом-VB шарнирно соединено с поперечном коромыслом-BТ для удержания в одной продольной вертикальной плоскости 2D-шарнир-BT и 2D-шарнир-HT.
Треугольный рычаг-HB двумя шарнирами соединен с боковыми 2D-шарнирами поперечного коромысла-HТ и одним шарниром с 2D-шарнир-BT. В центре поперечного коромысла-Т2 вертикальная ось-3 посередине спереди зажимной рамы туловища.
Боковые шарниры (продольных рычагов-Т) тазобедренного балансира экзоскелета 2-рычажным направляющим механизмом-Т как в подвеске колес самолета. 2-рычажным шарнирным механизмом-Т поддерживает взаимное положение осей-2-3 в вертикальной плоскости. Секторный шкив зажимной рамы туловища человека соединен 2 перекрещивающимися тросами с секторным шкивом-Т тазобедренного балансира экзоскелета.
Шкивы с тросами в ходьбе, беге поворачивают туловище экзоскелета, тазобедренный балансир экзоскелета (как туловище, таз человека) в противоположные стороны на одинаковый угол от продольной оси бега, гася момент ног моментом туловища.
Пальцы рук, рук, ног экзоскелета имеют 2 комплекта тросов. Комплект-1: толстые силовые тросы идущие в привод экзоскелета. Комплект-2: тонкие тросы идущие с рук, ног экзоскелета в зажимные рамы рук, ног человека. Тонкие тросы передают человеку движения экзоскелета, силу внешней среды.
Зажимная рама таза расположена на 80см назад, на 16см ниже тазобедренного балансира чтоб колени человека не задевали экзоскелет. Ноги экзоскелета на 10-15% длиннее ног человека.
Зажимная рама предплечья зажимает предплечье человека возле его обоих суставов. Зажимная рама предплечья 2D-шарниром соединена с задней вертикальной осью-Z1 продольного рычага-V, проходящего над плечом человека. Ось-Z1 это одна из 2 осей плечевого 2D-шарнира.
По шкивам в плечевом 2D-шарнире тросы идущие с пальцев, с руки человека идут вдоль продольного рычага-V в пальцы руки, в руку экзоскелета через плечевой 2D-шарнир руки экзоскелета. Зажимная рама ладони человека соединена с зажимной рамой локтя человека 3D-шарниром. Аналогично в руке экзоскелета.
Зажимная рама локтя человека соединена с зажимной рамой предплечья человека 2D-шарниром. Аналогично в руке экзоскелета. Зажимная рама бедра 2D-шарниром соединена с задней вертикальной осью-Z2 продольного рычага-Т. Ось-Z2 это одна из 2 осей 2D-шарнира зажимной рамы бедра.
По шкивам в 2D-шарнире зажимной рамы бедра тросы идущие с ноги человека идут вдоль продольного рычага-Т в ногу экзоскелета через 2D-шарнир бедра экзоскелета. Зажимная рама ступни ноги человека соединена с зажимной рамой голени человека 2D-шарниром. Аналогично в ноге экзоскелета.
Датчики силы экзоскелета в зажимных рамах человека: нет задержки управления от упругости троса.
Ступня экзоскелета двойная. Ступня-1 экзоскелета соединена с голенью экзоскелета так что ступня-1 экзоскелета направлена не вперед как у человека, а назад для совпадения центра опоры экзоскелета по вертикали с центром масс «экзоскелет + человек». Ступня-2 соединена шарнирно (горизонтальная ось шарнира) с задней частью ступни-1 экзоскелета чтоб точно повторяла угловое положение ступни человека. Ступня-1, ступня-2 связаны шкив-тросовым механизмом по принципу: ступня-2 на шарнирах ступни-1 двигается вниз на такое же расстояние, как ступня-1 на своих верхних шарнирах
Автомат коррекции пружин: поднимая с земли груз экзоскелет взвешивает его тензодатчиком силы – приводы (пневмотурбина + винт-гайка) компенсирующих пружин уравновесят вес груза, в разы уменьшая необходимую мощность экзоскелета.
Посадка в экзоскелет: экзоскелет лежит грудью на полу или стоит на горизонтальных голенях
Стартерный запуск экзоскелета: человек одевает шлем с стереоэкраном, включает стартер двигателя экзоскелета. Фиксатор блокирует вращение правого нижнего маховика экзоскелета. Через вращающийся трансформатор правого нижнего маховика подается ток в трехфазную обмотку генератора маховика, которая раскручивает правый турбокомпрессор двигателя с закрытым для вакуума входом.
После раскрутки снимается блокировка вращения маховика, открывается вход воздуха в правый турбокомпрессор. Сжатый им воздух подается (работа клапанов) в камеру сгорания правой турбины. Она начинает работать, её компрессор дает воздух в камеру сгорания (работа клапанов) левой турбины: заводится левая турбина.
После плавного переключения клапанов камеры сгорания обеих турбин работают с воздухом с правого компрессора, пока не наберет обороты левая турбина. Затем воздух (работа клапанов) с выхода правого компрессора идет на вход левого компрессора: он дожимает воздух. Далее камеры сгорания обеих турбин (работа клапанов) работают с воздухом с выхода левого компрессора.
Локти человека привод установит горизонтально вперед. Человек сел в седло. Ставит ноги в зажимные рамы ступней, руки в зажимные рамы локтя, как на подлокотник. Все приводы надувных зажимов рук, ног, туловища: пневмотурбина + винт-гайка. Пневмотурбины берут воздух системы вентиляции надувных зажимов.
У экзоскелета внешние кольчужные подушки безопасности, криптозащищенные рация, мобильный телефон, аварийный ответный (ответ по розыскному импульсу) радиомаяк.
Человек преобразует химическую энергию в механическую с КПД 30%. У лучших авиационных газотурбинных двигателей КПД 40%, минус 6% из-за КПД трансмиссии 94% = КПД экзоскелета 37,6%. Расход топлива на перемещение массы у газотурбинного экзоскелета 1,5 раз меньше человека. Керосин в разы дешевле человечьего топлива.
В марш-бросках цена человечьего топлива + керосина в экзоскелете в 3 раза меньше, чем у солдата без экзоскелета с той же нагрузкой. После марш-броска 60км с максимумом усиления солдат в экзоскелете идет в бой без усталости, солдат без экзоскелета небоеспособен.
Каналы обратной связи 4-кратно дублированы в разных принципах работы. Все провода экзоскелета коаксиальные: не откажут от луча мощного радара + защита от помех.
Газотурбинный двигатель экзоскелета в 2 раза легче, компактнее поршневого двигателя, 10 раз быстрее запуск в мороз -40°С, в разы надежнее, нет вибрации.
Для режима ожидания (работа сетевой информационной системы с датчиками, приводов бесшумной точной наводки оружия, кондиционера, отопителя, стартер…) вспомогательная (экономия топлива + инерционный стартер) микротурбина.
В помещении турбины работают на топливе с неядовитым выхлопом на экзотермической реакции с кислородом или азотом с очисткой выхлопа от твердых продуктов сгорания. Пример: титан, магний, литий, бор горят в азоте.
Погружение в воду: двигатель закроет вход, выход для переключения с наземного на гидрореагирующее топливо: окислитель вода.
Пожар: автоматическая система пожаротушения экзоскелета при пожаре в радиаторе кондиционера охладив выхлоп-газы, ими тушит пожар: датчики диагностируют пожар, его конец.
Взрывобезопасный (заполнен дырявыми сотами) топливный бак с наддувом охлажденными выхлопными газами от системы дожигания кислорода. Баки-2-3 размером с спичечную коробку с эластичной мембраной (сильфоном), разделяющей выхлопные газы наддува бака и топливо.
Баки-3-4 поочередно заправляет система подачи топлива, дает топливо двигателю в любом положении. Резервная пиротехническая подача с обратным клапаном.
Силовые балки экзоскелета: болванки авиационного пенопласта (пенометал, пеностекло) продольно-перпендикулярно обмотаны углеволокном в эпоксидке. Балка топливный бак: продырявленные (движение топлива) соты, обмотанные углеволокном. Для питья вода с выхода турбодетандера кондиционера.
Тросы разделены на отрезки с быстросъемными пружинными замками (инерционная 3D-балансировка замка) в промежутке между шкивами. Поврежден трос, меняем отрезок троса. Для облегчения захвата некоторых предметов кисть экзоскелета с контактно-вакуумными (давление предмета откроет вакуумный клапан) присосками.
Конец работы: человек жмет красную кнопку. Экзоскелет становится вертикально на горизонтальные голени, фиксируется. Приводы зажимных рам освободят человека.
Экзоскелет ходит по минным полям тяжелыми противоминными ходулями. На голенях у колен на прогрессивной подвеске хорошо обтекаемые снизу газами взрыва решетки: защита от прыгающих мин. Защищенность от мин лучше (квадрат расстояния ударной волны) танка.
Броня военного экзоскелета: чешуя из бронещитков на цепной сетке. Цепная сетка имеет в 20 точках на экзоскелете прогрессивную пружинную подвеску, ход 12см. Бронешиток: в алюминиевой матрице волокна длиной 1см + керамические квадратные (1см) пластинки с закругленными углами, рядами выемок в форме 4-гранных пирамид (глубина 1,5мм, угол 60°) с острыми верхними гранями на всей передней поверхности кроме периметра. Пластинок по глубине 2 ряда с перекрытием.
Вес бронешитка, параметры подвески подогнаны к импульсу самой опасной пули (снаряда, осколка). В 3 раза уменьшит вес брони, нагрузку от пуль, осколков пружинная подвеска бронешитов: подушка безопасности в падении.
В городских боях важна способность экзоскелетов нести броню (рикошетные пули, осколки), тяжелые пулеметы, боезапас. На крыше многоэтажного дома экзоскелет с зенитной пушкой (57мм активно-реактивный снаряд с активным самонаведением, распознаванием цели) в городе от вертолетов: 4 экзоскелета по лестнице бегом поднимут на крышу снаряды в противопульном контейнере за спиной.
Стрельба с зенитной пушки по танкам: экзоскелетчик стал на четвереньки, туловищем навел ствол по прицельной телекамере. Зенитная пушка на спине экзоскелета на параллелограммной подвеске на 3-угольных шарнирно складывающихся рычагах.
3-угольный рычаг-1 подвески пушки соединен с шарнирами по бокам головы экзоскелета.
3-угольный рычаг-2 подвески соединен с нижней частью туловища экзоскелета.
Отдачу пушки поглотит прогрессивная подвеска с электромагнитным амортизатором регенерирующем в конденсаторе энергию отдачи пушки.
Перед выстрелами 3-угольные рычаги шарнирно раскладываются, увеличивая длину рычагов для увеличения хода отката ствола, уменьшая отдачу пушки на экзоскелет. До вылета снаряда с пушки параллелограммная подвеска не меняет угловую ориентацию пушки для точности выстрела.
Импульс вниз получаемый снарядом софт компенсирует укорочением рычаг-2 подвески пушки пьезоэлектрическим (магнитострикционным) приводом.
При компьютерной наводке пушки человек выходит с экзоскелета в укрытие. Софт экзоскелета по алгоритмам распознавания цели всеми приводами экзоскелета наводит пушку на танки, самолеты, вертолеты. Стреляет по алгоритмам лучшего момента выстрела. Вариант: экзоскелет с крупнокалиберным минометом вместо пушки.
Для выстрела мин экзоскелетчик пружинами с электродвигателями раскладывает рычаги подвески миномета, поворачивает на угол 90° опорную плиту миномета, садится на землю с опорой миномета на опорную плиту, с закрытой позиции выстрелит миной-наводчиком.
В верхней части траектории мина надует водородный (водород продукт химреакции или гелий с балончика) аэростат: наводит мины гиростабилизированной телекамерой. После идентификации целей очередь выстрелов тяжелых мин с принудительной наводкой компьютером ствола миномета всеми приводами экзоскелета обратной связью с телекамерой аэростатного наводчика с алгоритмами распознавания софтом.
У каждой мины свои оптическая, инфракрасная телекамеры, свой софт, свои номер контекстной цели, алгоритмы распознавания цели, приводы управления полетом. Очередь – бег в другое укрытие от ответной очереди. Костюм телеприсутствия + андроид в работе 5-10 раз дешевле экзоскелета, 3 раза экономичнее. Человек бросит в атаку поочередно сотни погибающих андроидов. Конкурент экзоскелета триал-мотоцикл: шлем наводит пулемет в кардане с рычажной параллелограммной подвеской.
У воздушного беспилотника в центре масс пулемет. 3 пьезовибратора вокруг центра масс беспилотника посылают волну + 3 датчика волн на пулемете фиксируют по амплитудам суммарный вектор волн. Обратная связь «датчики – привод подвески пулемета» приводами подвески пулемета ставит ствол пулемета параллельно соосно суммарному вектору волн: отдача не собьет прицел (синий текст 3 раза за 5 лет заменили вредительским текстом). Пулемёт + 2 широкофокусные + 2 короткофокусные стереокамеры с совмещенной софтом картинкой. 4 года (с 2013г) вырезают с этой статьи, с моих 2-х компьютеров и флешек описание стартерного запуска экзоскелета, меняют текст, дублируют фразы, абзацы разных частей статьи, убирают деление на абзацы
КОСМИЧЕСКИЙ ЭКЗОСКЕЛЕТ (статье 10 раз вредили) – электродистанционный экзоскелет заменяет скафандр. Электродистанционный интерфейс экзоскелета: гермоотсек экзоскелетчика с экзоскелетами рук, ног человека соединяет с экзоскелетом разъем кабеля: хватит 2 провода на обратную связь, энергоподачу. Нет механических уплотнений движущихся деталей, герметичных соединений трубопроводов.
Космонавт по шлюзу входит сзади в гермоотсек нижней части туловища экзоскелета, жмет кнопку. Электромеханизмы герметизируют двери экзоскелета, шлюза. Датчики герметичности дверей приводом отсоединят экзоскелет от шлюза.
Человек не тянет вес тела, скафандра, системы жизнеобеспечения, радиационной защиты без приводов экзоскелета. Смертельную дозу радиации космонавт в скафандре соберет за минуты солнечной бури, за 200ч космических лучей.
Гермоотсек защищен от космических лучей, солнечных бурь, от нейтронов, от рентгеновского и гамма излучений термоядерных взрывов так, как защищают от радиации близких атомных взрывов борткомпьютеры ядерных ракет: покрытие гермоотсека сплавом изотопов металлов гадолиний-157Gd, эрбий-167Er. Внешний слой радиационной защиты с полиэтилена или композит из арамид-волокна.
С присоединенными баками гранулированной пищи, с кислородом, с химреагентами экзоскелет долговременная спасательная шлюпка космического корабля.
Экономия топлива: с передней стенки рычаг выдвинет педали с велогенератором. Человек сидя в зажимных рамах бедер с упором на зажимную раму туловища и зажимные рамы рук (фиксация тросов привода) крутит педали, заряжая аккумулятор. Ротор велогенератора вращается противоположно вращению оси педалей для компенсации момента.
Меняя транзисторами отношение мощностей велогенератора и электрогенератора оси педалей автомат управляет угловой ориентацией экзоскелета в поперечной горизонтальной оси. Спортсмен велогенератором 1 час создает (накопление энергии в маховике) мощность 1кВт: хватит мощному радиопередатчику, электрореактивному двигателю, гиродину.
Электроэнергия велогенератора гиродином выполнит 3D-ориентацию космического экзоскелета, его антенны в пространстве. Гиродин стабилизирует направление вектора тяги ракетных двигателей.
Энергию в экзоскелета шит (в кардане с приводами) с фотоэлементами за минуту закачает ультрафиолетовый лазер (в кардане) космического корабля. Обратная связь наводит друг на друга ультрафиолетовый лазер, фотоэлементный шит.
Радиатор, солнечные батареи экзоскелета имеют манипуляторы сдува газом планетной пыли с радиатора, солнечных батарей струей с сопла (рядом телекамера) многосерийного пиротехнического заряда.
Экзоскелет средство захвата космических кораблей в звездных войнах: экзоскелеты летят к кораблю, режут обшивку одноразовыми кумулятивными термитными резаками, проникают внутрь.
Экзоскелет посадочный аппарат. Софт двигает пальцами, руками, ногами экзоскелета в режиме максимума сопротивления атмосфере: гиперзвуковое падение на спину; руки, ноги углом 45° диагонально раскинуты вверх-вбок. Картинка с телекамер затылка экзоскелета.
У поверхности планеты 3 пиропатрона отстрелят с спины экзоскелета раскаленный теплозащитный шит, раскроют парашют. Экзоскелет ракетными двигателями приземлится работая ногами, руками. Вентилятор охладит атмосферой планеты горячую обшивку гермоотсека экзоскелетчика.
Вместо иллюминаторов адаптивные (автомат яркости) стереокамеры, полусферический 3D-монитор радиусом 30см. Пленоптические (матрица линз. Видео фокусирует софт) телекамеры экзоскелета дают стереокартинку сфокусированную софтом на нужные диапазоны глубины резкости. Вариант-2: на каждый фокусный диапазон своя пара стереокамер. Инфракрасные, ультрафиолетовые стереокамеры с фильтрами поляризации. Длина волны пиксельных датчиков подогнана к спектру полосы пропускания материалов объектива. В тыльной стороне ладони экзоскелета телекамера с управлением голосом, жестами
СЖО – система жизнеобеспечения экзоскелета на тепловом насосе: турбокомпрессор воздухозаборниками нижней части пилотского отсека откачивает воздух с парами человечьего пота. Горячий, от сжатия в последней ступени центробежного компрессора, воздух идет в регенератор воздуха.
Регенератор воздуха превратит пары воды в воздухе в кислород, поглотит углекислый газ. Высокая температура воздуха ускоряя химические реакции уменьшит размеры регенератора.
Регенератор воздуха: 2 попеременно включаемые секции с путанкой из проволок или аэрогеля покрытых катализатором, химреагентами. В режиме максимального производства кислорода проволоку греет ток или микроволновка. Химреагенты отнимут кислород с паров воды, химически свяжут углекислый газ. После регенератора воздух охладит инфракрасный радиатор верхней задней части экзоскелета.
Регенератор в одном корпусе с радиатором. На планетах с холодной атмосферой радиатор закроют зеркальные (для инфракрасных лучей) шторки из материала с низкой теплопроводностью. Разность давлений воздуха после радиатора регенерирует турбина турбокомпрессора СЖО.
На валу турбокомпрессора СЖО электростартер-генератор увеличивая, уменьшая обороты регулирует содержание кислорода, силу тока сети, регенерирует энергию. При выполнении турбокомпрессором функции гиродина, софт дросселирует входы компрессора, турбины.
При отказе экзоскелета-1 на Луне экзоскелет-2 подойдя к экзоскелет-1 перевернет его кверху спиной. Экзоскелет-2 переключится на управление в задней полусфере: к люку экзоскелет-1 он идет задним ходом: правой рукой человека софт двигает левую руку экзоскелета, левой рукой человека – правую руку экзоскелета.
Видеосигнал задних телекамер экзоскелета, последовательность управления рук, ног софт дает так, что человек воспримет движение экзоскелета назад как движение вперед. Софт дает заднюю полусферу как переднюю, сгибая локти экзоскелета назад.
Экзоскелет-2 руками стыкует свой задний люк с задним люком экзоскелет-1. 2 болта экзоскелет-2 выдвинутся, ввинчиваются в 2 гайки снаружи люка экзоскелет-1, совмещая кольцевые уплотнительные ободы люков экзоскелетов. Экзоскелет-2 включит открытие обеих дверей. Космонавт с гермоотсека экзоскелет-1 перейдет в гермоотсек экзоскелет-2.
У экзоскелета 2 пустотелых центрирующих болта с крупной упорной конической резьбой. 2 болта с конической резьбой расположены снаружи кольцевого уплотнительного обода люка гермоотсека. Левый болт-1 расположен чуть ниже середины высоты люка на расстояние-S, правый болт-2 на расстояние-S выше середины высоты люка.
Выше левого болт-1 на расстоянии-S выше середины высоты люка расположена гайка-1 с крупной упорной конической резьбой. Ниже правого болт-2 на расстоянии-S выше середины высоты люка расположена гайка-2 с крупной упорной конической резьбой.
В гайках в нерабочем состоянии резьба закрыта открывающейся приводом крышкой с уплотнителем. При загрязнении пирозаряд потоком газов по окружности вдоль нитки резьбы сдует мусор с резьбы.
Окончание работы: к люку шлюза Международной лунной базы экзоскелет идет задним ходом: правой рукой человека софт двигает левую руку экзоскелета, левой рукой человека – правую руку экзоскелета.
Видеосигнал задних телекамер экзоскелета, последовательность управления рук, ног софт дает так, что человек воспримет движение экзоскелета назад как движение вперед. Софт дает заднюю полусферу как переднюю, сгибая локти экзоскелета назад.
Экзоскелет руками стыкует свой люк с люком шлюза. 2 болта экзоскелета выдвигаются, с осевым давлением ввинчиваются в 2 гайки снаружи люка шлюза, совмещая кольцевые уплотнительные ободы люков экзоскелета, шлюза.
Аналогично 2 болта (их привод можно включить с экзоскелета) шлюза выдвигаются, с осевым давлением ввинчиваются в 2 гайки снаружи люка экзоскелета, дублируя 2 болта экзоскелета на случай их отказа.
В каждом болте тензодатчик силы при уменьшении силы ниже стандарта включит звуковую сигнализацию с мигающим красным болтом на схеме экзоскелета в экране шлема. В пазу кольцевого уплотнительного обода люка экзоскелета кольцевой надувной герметизирующий шланг. Подача воздуха или топлива в гермошланг герметизирует пространство между кольцевыми уплотнительными ободами люков экзоскелета, шлюза.
В нерабочем состоянии гермошланг экзоскелета закрыт 4 открывающимися при стыковке планками с уплотнениями. Дублирующий гермошланг в кольцевом уплотнительном ободе шлюза. Экзоскелет включит открытие обеих дверей
Ракетные сопла: выхлоп вниз (вниз-лево, вниз-право: если колени согнуты – они раздвигаются по бокам туловища, пропуская ракетный выхлоп) ракетного двигателя с верхнего сопла спереди-снизу головы, в два задних сопла сверху на спине разнесенных по бокам до плеч, не доходя до них.
Сопла + управляемый вектор тяги. Тягу можно направить вперед, назад, вправо, влево от туловища. Команда «взлёт»: резкое движение вверх носков обеих ступней человека – движения голеностопных суставов мгновенно блокирует софт, дальше командует датчик силы.
Команда «лететь вперед»: удерживаем в верхнем положении носки ступней. Горизонтальная скорость – от силы нажатия носков ступней вверх. Команда «угол атаки»: продольная ориентация экзоскелета – от угла колен. Команды «тормозить», «назад»: двигаем носки ступней вниз. Балансирует, ориентирует в полёте гиродин + вращение софтом рук, ног.
В пятке каждой ступни экзоскелета 3 3D-микрофона для раздельного приема продольных, поперечных звуковых волн лунного грунта. Микрофоны определят вектор прихода звука (с соседнего экзоскелета, лунотрясение…) в лунном грунте, глубину лунной пыли.
Импульсный генератор (вибратор) звука-ультразвука по зависимости трех задержек импульса на микрофонах от частоты звука определит материал, тип лунного грунта. Датчики этой системы дают сигнал о скольжении ступни экзоскелета вбок или вперед-назад.
В зажимной раме ступни космонавта нижняя опорная поверхность для ступни или обуви человека делится на две 2D-виброопоры ступни: переднюю, заднюю.
Передняя 2D-виброопора направление скольжения влево передаёт формой несимметричных (резко нарастающая, медленно спадающая амплитуда полупериода колебания) колебаний. Пластинка резко двигается влево и плавно идет назад. Направление скольжения передаёт вектор резкого движения. Направление скольжения вперед, назад тоже дает вектор резкого движения.
Гиростабилизированный экзоскелет: гиростабилизация гермоотсека спящего экзоскелетчика в режиме автопилот или при телеуправлении с удаленного костюма телеприсутствия. Форма экзоскелета близка к параллелепипеду: минимум стояночных пылесосных (лунная пыль) кубометров Международной лунной базы.
Экзоскелет сзади имеет почти круглую форму – при падении на спину можно легко перевернуться набок, встать. Навигационно-габаритные огни космического экзоскелета красные справа, зеленые слева. Экзоскелет развернет длинной лентой солнечную батарею или зонтик с солнечной батареей.
Солнечные батареи Международной лунной базы копят энергию в сверхпроводящем кольце или в вакуумном кольцевом сверхпроводящем (кольцевой ток) супермаховике с магнитным подвесом. Энергия сверхпроводящего супермаховика бесконтактно снимаем подмагничиванием трансформатора постоянного тока. В котором обмотка-2 сверхпроводящее кольцо супермаховика.
Подмагничивание (заполнение конденсатора) медленно уменьшает магнитное поле сверхпроводящего кольца. После резкого выключения подмагничивания рост магнитного поля сверхпроводящего кольца наводит в обмотке-1 трансформатора постоянного тока резкий импульс магнитного поля, тока в 100 раз мощнее энергии подмагничивания. Процесс периодично повторяем.
В дальних космических станциях супермаховик вытеснил аккумулятор: в разы долговечнее, надежнее, не зависит от температуры, радиации.
Экзоскелет лунного шахтера имеет электронно-лучевой сварочную головку в ладони экзоскелета. Сварочной головкой шахтер сварит крепь шахты. Электронно-лучевая сварка в вакууме требует в десятки раз меньше энергии. Электронно-лучевая сварка снижает сварочные деформации выделяя тепла 4-6 раз меньше аргоно-дуговой сварки.
При ходьбе по лунной пыли экзоскелет заряжается отрицательно. Защита борткомпьютера: сварочная головка экзоскелета импульсом электронов сбросит избыточный заряд.
Юпитер излучает мощные электромагнитные поля на спутники: для питания космического экзоскелета хватит отрезка многожильного алюминиевого кабеля. Космический экзоскелет упал в обрыв, космонавт жмет кнопку: пиропатрон надует шланг-антенну в форме круга. Круг покрыт проводящим слоем иридиевого сплава + скользкое покрытие чтоб круг не зацепился за камни. Шланг-антенна соберет энергию электромагнитных волн Юпитера, даст SOS
ДЕСАНТНЫЙ ЭКЗОСКЕЛЕТ: с космодрома, военного корабля ракета-носитель выйдет на орбиту с десантниками в десантных электродистанционных (управление по проводам) экзоскелетах. Электросеть ракеты-носителя раскрутит двигатель, маховик, гиродин каждого экзоскелета. В расчетной точке орбиты тормозной импульс.
Защита от противоракетной обороны: десантники в экзоскелетах расходятся от ракеты, спускаются с одной скоростью с ней, с одинаковыми с ней инфракрасными, оптическими, радиолокационными параметрами.
Гиромомент двигателя с маховиком держит ориентацию экзоскелета в вакууме. Софт двигает пальцами, руками, ногами экзоскелета в режиме максимума сопротивления воздуху: падение на спину; руки, ноги углом 45° диагонально раскинуты вверх-вбок. Картинка с стереокамер затылка экзоскелета.
За 8км до земли 3 пиропатрона отстрелят с спины экзоскелета теплозащитный шит. Экзоскелет управляемый на 90% софтом, на 10% десантником, планирует на спине в заданную картой цели точку. За 40м до земли многосерийный пирозаряд раскроет парашют. Вентилятор охладит воздухом изнутри раскаленную обшивку гермоотсека экзоскелетчика
ЭКЗОСКЕЛЕТ С ВОДЯНЫМ РЕАКТИВНЫМ РАНЦЕМ (статье 4 раза вредили) спецназ захватывает корабль в подводных экзоскелетах с водяным реактивным ранцем, поднимаясь на 10м. В нижнем конце шланга гидрореагирующее топливо крутит турбину с насосом.
Спецназовцы подплыв под водой к кораблю дают в разных частотах индивидуальный короткий ультразвуковой шифросигнал «готов к штурму». Проверив в дисплее лобового стекла наличие сигналов всех спецназовцев командир дает ультразвуковой шифросигнал «штурм в 15:47». Ультразвуковая связь на сотне частот.
Часть-1 спецназовцев приземляется в палубу корабля, отстреливает реактивный ранец. Часть-2 спецназовцев летая над кораблем в ранцах заменяет авиацию. Перепуск части воды – маскировочный туман. Шланг ранца бронируют керамические пластинки с отверстиями для кевларовых волокон.
Выбор видео любой телекамеры в экране шлема. Видеосигнал телекамер передает высоковольтная однопроводная линия связи через столб воды в шланге. Часть-3 спецназовцев под водой управляет летающими на водяном ранце телекамерами с пулеметом
ГЛУБОКОВОДНЫЙ ВОДОЛАЗНЫЙ ЭКЗОСКЕЛЕТ (статье 5 раз вредили) электродистанционный: водолаз на суше входит в люк гермоотсека, закроет люк. Жмет зеленую кнопку: включен двигатель. Вместо илюминаторов шлем с 3D-экраном. Отсеки с приводом прокачивают отфильтрованной забортной водой с давлением выше наружнего.
Турбина работает на гидрореагирующем топливе. На валу турбины электрогенератор на 2V. Выхлоп турбины с труб посередине туловища экзоскелета идет в верхнее сопло спереди-снизу головы, в два задних сопла сверху на спине разнесенных по бокам до плеч, не доходя до них. Сопла с управляемым вектором тяги: можно направить вперед, назад, вправо, влево от туловища.
Команда «взлёт»: резкое движение вверх носков обеих ступней водолаза – движения голеностопных суставов мгновенно блокирует софт, дальше командует датчик силы.
Команда «лететь вперед»: держим в верхнем положении носки ступней.
Горизонтальная скорость от силы нажатия носков ступней вверх. Команда «угол атаки»: продольная ориентация экзоскелета – от угла колен.
Команды «тормозить», «назад»: двигаем носки ступней вниз.
Балансировку, ориентацию дает верхний сопловый блок + гиродин + вращение софтом рук, ног экзоскелета с временным отключением водолаза от них.
В аккумуляторной версии глубоководного экзоскелета вместо 3 сопел водомет с вектором тяги внутри головы (снаружи по окружности телекамеры) экзоскелета. Вода входит сверху головы в водомет, выходит спереди-снизу, сзади-снизу головы.
В тыльной стороне ладони экзоскелета телекамера (закрыта управляемой шторкой с уплотнениями) с управлением голосом, жестами. Для облегчения захвата некоторых предметов кисть экзоскелета с контактными (давление предмета открывает клапан) присосками.
Оптика стереокамер экзоскелета оптимизирована на определение расстояния до предмета. Для зрения в мутной воде у экзоскелета 3 разнесенных равнобедренным треугольником приёмоизлучающие ультразвуковые пьезокристаллические модули. Модули одновременно излучают на разных частотах. По трем отраженным частотам (алгоритмы ультразвукового зрения в мутной воде) сонаров софт дает картинку шлему.
Гермоотсек экзоскелетчика без изменений соединяется с глубоководным экзоскелетом любой другой модели подключением стандартного низковольтного электроразъема с уплотнением + заполнение разъема диэлектрической жидкостью + армированный мешок выравнивающий давление.
Силовые балки экзоскелета: соты с продырявленного (выравнивание давлений) титана продольно-поперечно обмотаны углеродной нитью в эпоксидном клею, прожарены автоклавом. В балках отверстия с фильтрами для выравнивания давлений при погружении.
Разницу давлений «топливо – забортная вода» в топливном баке глубоководного экзоскелета компенсирует деформация армированного мешка с гидрореагирующим топливом двигателя. Пространство, освобождающееся в баке от сплющивания мешка с топливом, заполнит забортная вода после фильтра.
Лазерно-импульсная система телекамер 3-5 раз увеличит дальность зрения: лазер экзоскелета дает сверхмощный сверхкороткий импульс-1 света длиной 4см. В полете отраженного от объекта съемки импульса-1 лазер ему просветлит путь, освещая воду светом длин волн, срывающих электроны с поглощающих свет электронных орбит молекул воды. Больше сорвано электронов с поглощающих свет электронных орбит – прозрачнее вода.
Просветляющий воду лазерный импульс-2 отстает от импульса-1 на длину 6см, длится до достижения отраженным импульсом-1 расстояния 8см до стереокамер экзоскелета. Стереокамеры включаются на 4см прихода отражённого от объекта съемки импульса-1 света.
Высококачественная цветная стереокартинка: стереокамеры с 3 объективами на 3 цвета системы цветного телевидения в каждой телекамере. Длина волны пиксельных датчиков подогнана к спектру полосы пропускания морской воды, к материалу объектива. Подгонка материалов объективов, пиксельных датчиков дают идеальную цветную картинку. Глубина погружения телекамер неограничена: за стеклом жидкие линзы с компенсацией разности давлений деформацией армированного мешка.
Глубоководный экзоскелет соединен с шлюзом под днищем судна для быстрого реагирования. В кончиках указательных пальцев экзоскелета электроды электрошокеров для защиты от кашалотов, гигантских кальмаров, медуз
ВОЕННЫЙ ЭКЗОСКЕЛЕТ фильтрами, давлением изолирует человека от химического, бактериологического, ядерного оружия. Военные экзоскелеты быстро разворачивают в горах, в крышах зданий мощную систему ПВО с неограниченным по времени расходом боеприпасов. От авиации экзоскелет защищает своя ПВО: зенитная пушка-57мм с распознающими цель активно-реактивными снарядами. Снаряды: программируемый (инфракрасный дальномер) дистанционный подрыв, кумулятивные, термобарические.
При стрельбе вверх на большую высоту (увеличенный жидкий метательный заряд снаряда) отдачу гасит об землю минометная плита (экзоскелет сидит) пушки. Пушка на 3 параллельных, складывающихся в нерабочем положении, двухзвенных рычагах на спине экзоскелета за человеком. Параллелограммная рычажная подвеска с электронным амортизатором гасит отдачу пушки. Центральный рычаг-1 длиной 0,6м: шарнир в зажимной раме туловища человека. Два рычага-2-3 длиной 0,6м: шарниры в зажимной раме туловища человека. Рычаги-1-2-3 параллельны. Пушка наклонена углом 10° к вертикали при ходьбе. С рычагами-1-2-3 при отдаче ось пушки двигается параллельно прямой, наклоненной углом 10° к вертикальной оси туловища экзоскелета.
С пушки на ходу экзоскелетчик горизонтально стреляет бегая на четвереньках. Сетевой интерфейс двусторонней связи, выбор параметров «вес – броня», «вес – мощь оружия» через выбор оружия, навесной брони с прогрессивной пружинной (торсионной) подвеской.
Реки под водой экзоскелет переходит за счет инерции вращения ротора двигателя. Вход в большую реку: экзоскелет-1 выключит газовую турбину, переход на питание электрокабелем (чуть длиннее ширины реки) с экзоскелет-2. После выхода на соседний берег экзоскелет-1, включив газовую турбину, дает кабелем электроэнергию экзоскелету-2. Перед входом в воду экзоскелет-2 выключит газовую турбину, идет под водой на электромоторах.
Кабель однопроводной: провод-1 вода, провод-2 – поверхность (контакт с водой) корпуса экзоскелета. Вариант-2: металическая (контакт с водой) оплетка кабеля (36V) в качестве провод-2. Вариант-3: многоволоконный оптический кабель
ЭКЗОСКЕЛЕТ АЛЬПИНИСТА: малый вес, высокие силовые параметры пальцев экзоскелета, мощность 1-3кВт. Встроены: шкивы для веревок, комплект альпинистского снаряжения. Кольчужные подушки безопасности
ЭКЗОСКЕЛЕТ ГРУЗОВИКА вместо крана: сложенный калачиком экзоскелет (энергия от кабеля) умещается в тесном отсеке под кабиной. Экзоскелет может 5мин работать без кабеля за счет 5-минутного аккумулятора. Водитель жмёт кнопку: 2-рычажный манипулятор вытащит с отсека под кабиной экзоскелет, ставит вертикально. Водитель запрягается в экзоскелет, ставит тяжелые грузы на машину. Кончил работу – пристыковал экзоскелет к робот-приводу, влез в кабину, жмёт кнопку. Манипулятор запихнет экзоскелет в отсек под кабиной. Проколол колесо грузовика – с экзоскелетом поменял колесо
ЭКЗОСКЕЛЕТ ГОНЩИКА для защиты мотоциклиста от ударов автомобилей, фонарных столбов – решетчатый шарнирно-рычажный каркас на мотоциклисте. Все шарниры имеют блокирующие их быстродействующие ленточные амортизаторы. Рассмотрим вертикальный рычаг-А, соединенный осью-1 с вертикальным рычагом-В снизу. От рычага-А в шарнирно-рычажном каркасе по шкиву-1 в общей оси-1 по рычагу-В идет трос-1. В нижнем конце рычага-В трос-1 по шкиву-2 в оси-2 поворачивает наверх по внешней стороне рычага-В. На этом конце трос-1 соединен с тормозной лентой.
Тормозная лента трется по внешней тормозной поверхности рычага-В. Для увеличения тормозной поверхности снаружи внешней поверхности рычага-В и тормозной ленты тормозная колодка длиной с рычаг-В. Тормозная колодка прижимает тормозную ленту и своей поверхностью удваивает площадь тормозной поверхности.
От осевого смещения тормозную колодку страхует верхний выступ в рычаге-В. При движениях мотоциклиста, автогонщика тормозную ленту вниз двигает трос-1. Вверх тормозную ленту возвращает пружина в верхней части рычага-В.
При внешнем ударе тормозная колодка, зажимая тормозную ленту, блокирует взаимное угловое смещение рычагов-А-В, превращая их в жесткий защитный панцирь защищающий от удара
МЕДИЦИНСКИЙ ЭКЗОСКЕЛЕТ: медицинский экзоскелет для переноски, укладки больных, выноса раненных с поля боя: высокие чувствительность, разрешение тактильных матриц кисти, высокий коэффициент трения подошв ступней, коленей экзоскелета на мокром полу
РУКОНОГИЙ ЭКЗОСКЕЛЕТ ИНВАЛИДА
Он позволяет инвалиду превзойти (мощный двигатель) обычного человека по скорости, легкости ходьбы и бега в любых (лестницы, стадионы) условиях. РУКОНОГИЙ ЭКЗОСКЕЛЕТ: инвалид управляет ногами экзоскелета (свои ноги парализованы) своими руками через управляющие экзоскелеты рук с силовой обратной связью с копирующими экзоскелетами ног (интуитивно-свободная ходьба, бег на руках без длительной тренировки) + гиродин для ходьбы в автопилоте.
При управлении экзоскелетами рук нагрузки на экзоскелеты ног человек воспринимает подпружиненными седлом, двумя двухрычажными подмышечными упорами.
В подмышечном упоре (правая рука) боковые нагрузки на экзоскелет правой ноги воспринимает правое предплечье человека через две опорные плиты подмышечного упора. Нагрузки на экзоскелет ноги, в направлении вперед-назад принимают опорные плиты подмышечного упора спереди, сзади плеча человека.
Опорные плиты подмышечного упора имеют множество отверстий вентилирующих (трубки от компрессора) нагруженное плечо. Копирующая обратная связь передает угол «локоть – предплечье» в экзоскелет ноги как угол колена, не передавая направление вращения сустава. Коэффициенты усиления экзоскелета руки раздельные на плечо, на предплечье, на локоть и ладонь (управляет ступней экзоскелета ноги): настройка колесиками эквалайзера усиления.
Софт приводами (обратная связь с датчиками силы) двигая рычажные механизмы и пружины подвесок, равномерно делит нагрузку между седлом таза, подмышечными упорами и зажимными рамами ступней.
Коробка приводов тросов общая для экзоскелетов рук, ног – спереди на животе человека. Экзоскелета руки, ноги спереди (защита от лобового столкновения) человека, ступни ног экзоскелета направлены назад для совмещения в вертикали центра масс экзоскелета и центра масс человека. В ходьбе, беге эта вертикаль наклоняется вперед.
Микротурбина (выхлопная труба наверх внутри дуги безопасности) с аккумулятором спереди человека. Ступни экзоскелета, ступни человека совмещены рычажным механизмом, компенсирующим несоосность ступней
Посадка в руконогий экзоскелет: экзоскелет лежит на полу, вытянутыми руками приподняв на угол 45° зажимную раму туловища. Инвалид пересаживается в седло зажимной рамы туловища, прижмется грудью к датчику прижима. По сигналу датчика прижима и датчика веса в седле зажимная рама туловища зажмет туловище человека цепными зажимами равномерного прижима.
Инвалид ставит руки на упоры локтей и предплечий управляющих экзоскелетов рук. Зажимные рамы локтей и предплечий по сигналам их датчиков веса зажимают локти, предплечья человека. Он рукой выбирает режим движения (в помещении или на улице), переключает экзоскелеты рук в копирующий режим для экзоскелетов ног.
При включении голосом вертикальной неподвижной фиксации стоя, управляющие экзоскелеты рук (управляющие ногами экзоскелета) отключаются от ног, переходя в режим выключения или в режим усиления рук. Гибридный модуль энергоснабжения экзоскелета: микротурбина + аккумулятор.
В помещении работа на аккумуляторе. Нет розетки для зарядки: инвалид выйдет на улицу, инерционным стартером заводит микротурбину с глушителем. Микротурбина зарядит аккумулятор
Спортивные экзоскелеты: акробатические, силовые (поднятие, метание тяжестей), игровые, гоночные (триал, кросс, кольцевые гонки), альпинистские.
18)
КОМПЬЮТЕР АНДРОИДА: (статье 9 раз вредили) Сообщаю моим будущим индийским работодателям: версия процессора моего матричного нетриггерного компьютера успешно прошла виртуальную проверку выполнения 4 арифметических действий, управления числом параллельных каналов, пропорциями их вычислительной мощности, работы с математическими формулами любой структуры, работы с ссылками любой сложности, с базой данных.
Адресная система компьютера требует меньше памяти. Надежность работы софта выше существующих компьютеров, на создание софта надо 10 раз меньше времени.
Мой микропроцессор менее чувствителен к браку. Корректировочный софт простыми чисто программными методами обойдет поврежденные части электрической схемы микропроцессора.
В изобретенном мной микропроцессоре софт управляет числом параллельных каналов, пропорцией вычислительной мощности между ними. Одновременная подача тактовых импульсов на все параллельные каналы от коммутатора управляемого софтом. Одновременно работают миллиарды параллельных каналов, их число определяет софт.
Архитектура микропроцессора позволяет производить параллельно одновременно миллиарды совершенно разных вычислений в одном микропроцессоре. Детали после приезда в Индию, контакта с индийской фирмой.
Чем сложнее алгоритм и выше требования к быстродействию в сложных задачах, тем больше превосходство моего микропроцессора над существующими. В существующих микропроцессорах число параллельных каналов – десятки активных ядер.
В 100% современных микропроцессоров основной элемент это триггеры. В моём микропроцессоре нет триггеров, он мгновенно включается, выключается. Архитектура подходит к любым задачам.
Бесконечно повторяющаяся архитектура моего микропроцессора и отход от триггерного принципа в десятки раз повышает радиационную стойкость компьютера. Есть несколько архитектур с разным принципом работы для защиты от разных поражающих действий внешней среды.
Есть варианты архитектуры моего микропроцессора без транзисторов. Мой микропроцессор уничтожит монополию христианских стран на архитектуру микропроцессоров.
В микропроцессорах лидировала архитектура x86, её сменяет архитектура ARM с сокращенным набором команд. В архитектуре моего микропроцессора набор команд сведен к абсолютному минимуму и исключает проблему совместимости софта железа разных поколений.
Мой микропроцессор не дает незамеченно использовать компьютерную бомбу: отразится в структуре бесконечно повторяющихся групп элементов. Неразрушающая жидкостно-гиперзвуковая томография выявит компьютерную бомбу.
В компьютере трудно кодом компьютерной программы скрыть недокументированные возможности: действия кода однозначны, выполняются единственной комбинацией символов. Меньше вероятность успешной атаки хакера и вероятность багов кода.
Компьютер может работать (вариант без полупроводников) в температурном диапазоне 0-2200°К с подбором материалов. Совместимость с существующим софтом через симуляторы операционных систем.
В курсах программирования исчезнут существующие компьютерные языки. Ядро операционной системы ОС 4-кратно записано в железе микропроцессора. При включении любой из ОС проверка их 4-х корректировочных файлов, голосование. Если система голосования 4-х ОС выявила пропажу файлов одной из ОС: сообщение пользователю, восстановление.
Я придумал самый быстрый по скорости работы аналого-цифровой преобразователь АЦП цифровой записи музыки превосходящий все другие АЦП по сигнал/шум и коэффициенту гармоник (встроенная быстрая фильтрация). Работает на качественно новых принципах работы АЦП: более плавный звук, у высоких частот меньше фазовые и частотные искажения. АЦП работает с любыми аналоговыми сигналами, нагревается меньше, экономно расходует энергию аналогового сигнала. Нужен выход на индийскую фирму для патентования, производства АЦП.
Я изобрел самый быстрый цифро-аналоговый преобразователь ЦАП.
Я разработал гибридную систему полной передачи по радио или оптоволокну сигнала костюма телеприсутствия. Гибридная система сочетает малую задержку, высокое качество аналогового сигнала с помехоустойчивостью цифрового. Гибридная система оптимизирована на малую задержку управления костюмом телеприсутствия.
Нашел аппаратный способ: одна микросхема памяти одновременно для десятков разных компьютеров. Одни и те же ячейки микросхемы одновременно используют десятки разных компьютеров
19) (статье 12 раз вредили) В параллельной работе моего компьютера вначале обработка канала самого быстрого, затем приоритетного. Зашита от сбоя: децентрализация, приоритетная иерархизация работы функциональных элементов операционной системы.
Пробивное напряжение изоляции не меньше 500V. Чтоб с одной параллельной ветви схемы пробило на другую надо выполнить физический закон: природа стремится к минимуму потенциальной энергии. Чтоб импульс пробил изоляцию параллельной проводниковой ветви микропроцессора это должно быть выгодно из принципа минимума затрат энергии на прохождение от минуса источника напряжения к его к плюсу. Радиус поворота импульса тока – максимальный.
Период импульса минимален: меньше поляризация диэлектрик-изоляторов. Проводники, полупроводники микропроцессора снаряда окружены ферритом для разгрузки от перемещения энергии, для уменьшения поляризации диэлектрик-изоляторов
Часть-1 энергии несет электромагнитная волна.
Часть-2: постоянная компонента движения электронного газа молекул.
Часть-3: механическая энергия (ток смещения) продольных волн внешних электронных оболочек атомов.
Перераспределение энергии между электромагнитной, механической формами энергии уменьшит вероятность пробоя изоляции электроцепи.
Для микропроцессора на 600000-2000000V даже для постоянного (несимметричного треугольного пульсирующего) тока не нужны проводники: импульсы несет ток смещения диэлектрика. В роли проводника диэлектрик с неплотной упаковкой электронных оболочек молекулы: элементы групп-1-2 таблицы Менделеева. Роль диэлектрика выполнит диэлектрик с плотной упаковкой электронных оболочек молекулы.
В микропроцессоре переменного тока на 600000-2000000V нет гальванически замкнутых электрических цепей. Схема работает на токе смещения диэлектрика от пьезогенератор + пьезотрансформатор. Микропроцессор на 600000-2000000V не боится (в медном экране) высотной разности потенциалов 1млн вольт на метр высоты от электронов (из атомов атмосферы), сдутых к поверхности планеты гамма и рентгеновским излучением ВЫСОТНОГО (80-500км) термоядерного взрыва. Матрица компьютера: повторяющийся рисунок ячеек. Корректирующая программа составляет таблицу адресов поврежденных ячеек матрицы.
При удаленном соединении матриц – синхронизация через часы абсолютного времени + согласованный 2-мя матрицами алгоритм раздела, обработки файла. Компьютер при сильном нагреве уменьшит частоту тактовых импульсов, напряжение, компенсируя шум от растущих токов утечки. Меняет быстрые подпрограммы на термоустойчивые, тактовый импульс медленно нарастает, быстро спадает для компенсации утечек конденсаторов эффектом самоиндукции.
В компьютере андроида Айзек-пожарный при превышении начальной критической температуры процессор температурной зоны-1 перепишет память температурной зоны-1 в память процессора температурной зоны-2, передает обработку информации процессору температурной зоны-2 (процессор из карбид-кремниевых транзисторов работает в 500°C). Передав, получив ответ, процессор температурной зоны-1 отключится при достижении своей конечной критической температуры.
При превышении начальной критической температуры процессор температурной зоны-2 перепишет память процессора температурной зоны-2 в память процессора температурной зоны-3, передает обработку информации процессору температурной зоны-3. Передав, получив ответ температурная зона-2 отключится. Процессор температурной зоны-3 аналогично передает управление процессору температурной зоны-4. При снижении температуры все в обратном порядке.
В MP3, других алгоритмах чем выше частота звука, тем хуже отношение сигнал/шум. В моем алгоритме сжатия все частоты с одинаковым отношением сигнал/шум. Принцип квантования амплитуды сигнала заменил. Алгоритм позволяет с равным для всех частот отношением сигнал/шум сжать любой аналоговый сигнал. Возможность эквалайзером «сигнал/шум – частота» управлять отношением сигнал/шум (дополнительное сжатие) в узких частотных диапазонах
20) СИСТЕМА КООРДИНАТ МИМИКИ ЛИЦА АНДРОИДА: основа пропорциональной системы координат для программирования мимики – треугольник соединяющий центр каждого глаза с центром губ. Центр левого (с точки зрения андроида) глаза точка А. Центр правого глаза точка В. Середина отрезка, соединяющего точки А и В это точка С. Центр губ – точка D.
Для координаты X расстояние АВ это поперечная мера программной длины – 100% АВ. Остальные расстояния в координате X измеряются в долях от 100% АВ.
Для координаты Y расстояние между точками С и D это вертикальная мера программной длины – 100% СD. Остальные расстояния в координате Y измеряются в долях от 100% СD.
Для координаты Z расстояние измеряется в долях от 100% СD.
У андроидов под кожей лица наполненные воздухом или упругим материалом стандартные трубочки. На поверхности трубочек тефлоновые петли для тросов. Через эти петли в каждой трубочке продеты 3 троса. 3 троса закреплены с одной стороны на конце трубочки.
Управляя приводом натяжением 3 тросов каждой трубочки алгоритм эмоции симулирует мимику человеческого лица. Алгоритмы эмоций в таблицах решений.
В алгоритмах плавное замедление конца движений. Часть трубочек соединены вместе в прямоугольники для уменьшения числа тросов. Лицевую мимику софт андроида производит приводами лица андроида по командам отдельных букв, их связок. Буквы, их связки по голосу человека распознает софт, подгоняя мимику андроида к сочетаниям букв голоса
ИМИТАЦИЯ РАБОТЫ МЫШЦ: перекатывание мышц зрительно, тактильно симулирует закрепленная в шарнирах, в скелете робота кевларовая сетка. Сетка переплетена кевларовыми нитями с длинными армированными резиновыми шлангами. Шланги наполнены жидким топливом, азотом или воздухом. Когда заканчивается топливо оно заменяется вначале азотом с баллона. Затем воздухом с компрессора.
Шланги симулируют мышцы. Самые крупные мышцы симулируют переплетенные кевларовыми нитями 2 слоя воздушных шлангов: внутренние толстые шланги, внешние тонкие шланги. 2 слоя шлангов точно симулируют тактильные ощущения человека при тактильном контакте с роботом – домашним животным.
Снаружи шланги покрыты тефлоном: снижает трение. Робот двигается: в одних резиновых шлангах давление растет, в других падает. Резиновые шланги робота связаны 2 сетями: сеть трубопроводов большого давления, сеть малого давления. Давление в шланге поднимает электроклапан-B сети большого давления. Давление в шланге сбрасывает электроклапан-M сети малого давления.
Все электроклапана с глушителем звука. Софт симулирует электроклапанами сокращения мышц под кожей робота – домашнего животного. Софт симулирует температуру кожи
21)
РОБОФОРМУЛА ТГК (Технологии Галактических Колонистов): (статье 2 раза вредили) Андроидов чемпионат мира: бои смешанного стиля, костюм телеприсутствия. Правила:
1. запрещено превращать спорт в его противоположность лотерею: правила повышают вероятность победы лучшей команды, лучшего спортсмена
2. все правила создают, подтверждают голосованием только активно действующие в гонках представители команд
3. нарушения фиксирует приговором Суд формулы голосованием взаимно не сообщающихся (не видят, не слышат друг друга) 10 судей. Решение Суда не позже 3 дней
4. правила можно менять только большинством в ⅔ голосов Парламента. Нет 90% голосов: новые правила вступят в силу через год чтоб бедным командам хватило денег времени на подготовку
5. денежные штрафы запрещены принципом равноправия бедных, богатых команд. Бедная команда может участвовать только в одном этапе чемпионата, если мало денег
6. денежные залоги, взносы участников гонок в пользу организаторов, другие формы легализованной коррупции запрещены. Организаторы работают за идею колонизации Галактики человеком, не за деньги, чтоб организаторами не становились люди с спецслужб, реализующих эгоистические интересы класса силовиков. Соревнования реализуют интересы всего гражданского общества, а не одного класса
7. у андроида только 1 человек-оператор
8. обслуживает андроида между раундами только его человек-оператор
9. настраивает андроида только оператор
10. ввод программы на ринге запрещен
11. регулировка по телеметрии на ринге разрешена только человеку-оператору андроида. Запрет двухсторонней телеметрии
12. категории андроидов по максимуму сухого веса
13. андроид заправлен разрешенным количеством топлива + 10% избыточного топлива. За каждый истраченный процент избыточного топлива штрафной балл
14. взрывобезопасный топливный бак
15. ограничения на токсичное или дающее токсичный выхлоп топливо
16. запрет жидкой смазки, только твердая смазка
17. возможность обзора задней полусферы андроида
18. защита от электромагнитной бомбы, радиации: цифры
19. запрет подогрева охлаждения функциональных элементов андроида внешним искусственным источником энергии. Исключение: подогрев, охлаждение топлива
Международный андроидный чемпионат мира: андроиды акробатические, силовые, игровые, гоночные (триал, кросс, кольцевые гонки), альпинистские (скоростной подъем в гору, в искусственное высотное препятствие)…
После эмиграции организую Чемпионат мира андроидов. Упор на деньги спосоров и за телетрансляцию, билеты… Команды участвующие в Чемпионате мира андроидов, покроют расходы рекламными логотипами на андроидах, долей за телетрансляцию. Доля зависит от количества набранных в Чемпионате мира очков + доля за продажу билетов.
Андроиды с узлов, софта разных фирм, несут их рекламные логотипы. Доходы команд зависят от числа очков в чемпионате. В Парламент Чемпионата входят команды набравшие требуемое регламентом число очков.
Соревнования по единоборствам, по штанге, бегу, плаванию, по подводному плаванию, по прыжкам в высоту, по гимнастике. Робофутбол: 1 человек управляет 4 андроидами одной команды через костюм телеприсутствия, переключаясь между роботами. Совместно с Чемпионатом мира андроидов с ИИ Чемпионат мира аватар-андроидов, Чемпионат мира по костюмам телеприсутствия.
В Чемпионате мира по костюмам телеприсутствия их оценивают по качеству управления андроидом; как универсальные авиа или автосимуляторы. Оценка пригодности костюма телеприсутствия для виртуальных альпинистских восхождений, других виртуальных Интернет-применений. Интернет линию моделирует Судейская коллегия, управляя пропускной способностью линии. В каждом Чемпионате мира – свой Парламент Чемпионата
22) РОБОСОБАКА: (статье 6 раз вредили) В туловище собаки 3 электромотора. Задний электромотор-маховик-1, средний электромотор-маховик-2 и передний электромотор-маховик-3 на одной продольной оси собаки.
Вал электромотор-маховика-2 проходит коаксиально внутри валов электромотор-маховиков-1-3 к транзисторным муфтам сцепления у поперечного заднего балансира (продольная ось вращения) задних ног собаки и к транзисторным муфтам сцепления у поперечного переднего балансира (продольная ось вращения) передних ног собаки
Поперечно-балансирная подвеска ног позволяет робособаке спускаться по лестнице передним ходом, чего не умеют существующие робособаки.
Средний электромотор-маховик-2 через обратную связь датчиков момента с транзисторными муфтами привода ног компенсирует действующие на собаку вращающие моменты электромотор-маховиков-1-2. Приводы правых и левых ног подключены к электромотор-маховикам по принципу: «к тому электромотор-маховику, направление вращения которого создает момент компенсирующий заваливающий вбок момент касания земли правой (левой) ногой собаки». Электромотор-маховики-1-3 двигают ноги одного борта, электромотор-маховик-2 двигает ногами другого борта собаки, что уменьшает расход энергии на поперечную устойчивость робособаки.
На валу заднего балансира ног задние транзисторные муфты сцепления с коаксиально расположенными выходными валами балансира ног. На валу переднего балансира ног передние транзисторные муфты сцепления с коаксиально расположенными выходными валами балансира ног.
После передних транзисторных муфт сцепления тросы с коаксиальных шкивов (тросы закреплены на них) от электромотор-маховиков-2-3 переходят на внешние концы балансира и через дополнительные шкивы, оси поворачивают на угол 90° в шкивы (плечевые шарниры передней ноги) с горизонтальной поперечной осью вращения. Далее тросы идут на колена задних ног. Функцию трансмиссии выполнят энергия электромотор-маховиков-2-3 + тросовые редукторы. Аналогичен привод задних ног собаки.
Софт обратной связью «сила троса – транзисторная муфта» регулируя взаимное противодействие тросов сгибателей, разгибателей держит постоянным натяжение тросов. Софт дает сигналам отрицательного ускорения больше усиления, затухания чем сигналам положительного ускорения: установки графиков усиления, затухания датчиков.
Ввод сигнала транзисторных муфт, обмен энергией между электромотор-маховиками через вращающиеся трансформаторы.
80% мощности идет в задние ноги. Пружина (торсион) с датчиком силы берет на себя основную нагрузку при приземлении собаки на передние ноги, разгружая привод при толчке. Пружина (торсион) с датчиком силы помогает оттолкнуться задним ногам, разгружая привод при толчке. В ходьбе нога собаки преждевременно задела (горизонтальный вектор силы) землю – датчик приводом поднимет ногу
Колени задних ног сгибаются вперед чтоб облегчить нижнюю часть ноги, убрав с неё сгибающую нагрузку при толчке. При такой схеме основную работу выполняет верхний сустав. В моей схеме основная моментная нагрузка приходится на приводы расположенные ближе к туловищу, что снижает момент инерции ноги в беге – больше скорость бега робособаки. Чем ближе к туловищу основной привод ноги, тем меньше вес робособаки и нагрузка на верхний шарнир ноги
Вариант-2: у робособаки 3 ноги: 2 спереди, 1 сзади. Алгоритм в время шага переставляет заднюю ногу на внешний радиус поворота для резких поворотов
РОБОКОНЬ
с ростом скорости поднимает вверх стремена, мотоциклетные рукоятки для рук. Угол между осями рукояток руля 60° для равномерной натяжки сухожилий. Руль может поворачиваться в поперечной горизонтальной оси-X, проходящей через центры рукояток. Поворачивая руль в оси-X вперед против пружины-1 всадник увеличивает скорость робоконя.
Поворачивая руль в оси-X назад против пружины-2 всадник тормозит робоконя. Каждая рукоятка – джойстик с коническим кольцом для большого пальца. Кольцо правый большой палец резко двигает вверх вдоль оси рукоятки руля: робоконь прыгает высоко вверх через препятствие. Левый палец резко двигает кольцо вверх: робоконь делает длинный прыжок. Кольца вниз: робоконь уменьшит дорожный просвет. Больше вертикальная амплитуда – выше ставит стремена датчик вертикального ускорения коня.
Впереди рукояток обтекатель мотоциклетного типа, чтоб ветки деревьев не ломали пальцы. У робоконя передние, задние боковые дуги безопасности, 3 ноги: 2 спереди, 1 сзади. У задней ноги колено сгибается вперед чтоб облегчить нижнюю часть ноги убрав с неё сгибающую нагрузку при толчке
23)
ДОМАШНИЙ ОХРАННЫЙ РОБОТ
4-колесный «Ночной кабан» с стереокамерами, 2 длинными руками с электрошокерными наручниками. Управляет гостеприимным роботом владелец дома через экран мобильного телефона после звонка робота: что делать с взломщиком?
В экранном меню телефона кнопки управления роботом. Управление яркостью ультрафиолетового фонаря, чтоб с улицы разборку «Ночного кабана» с взломщиком не увидели сообщники взломщика. Управление микрофоном, динамиком робота для беседы с взломщиком. После беседы робот застегнет ему ноги адаптивными электрошокерными наручниками.
Адаптивные электрошокерные наручники настроят внутренний зазор наручников обратной связью с датчиком силы. Если взломщик руками не дает застегнуть наручник, алгоритм робота дает высокое напряжение в матрицы электродов электрошокера наручника, принуждая взломщика двигать руку в нужном направлении.
Если у взломщика металлизированная одежда, робот определит это по сопротивлению в электродах шокера, включит микроволновую обмотку или низковольтный нагреватель.
Робот в стенном замке и в наручниках на ногах включит радиомаяк точного времени. Наручник-L левой ноги взломщика сравнит радиосигнал точного времени от стенного замка с своим аналогичным сигналом точного времени. Полученное время задержки наручник-L по радио отправит наручнику-R правой ноги.
Аналогично эти операции выполнит наручник-R, отправит свое время задержки сигнала точного времени на наручник-L. На обоих наручниках-L-R их компьютеры по двум задержкам сигнала точного времени определят в какую ногу дать напряжение шокера или резисторного нагревателя. Напряжение шокера получит нога стоящая дальше от стенного замка.
Напряжение прекращается когда отстающая нога-1 приблизится к стенному замку ближе ноги-2 на стандартное расстояние. Затем напряжение идет в наручник отстающей ноги-2, пока нога-2 относительно ноги-1 не станет ближе к стенному замку на стандартное расстояние.
Взломщик против своей воли шагает к стенному замку. Следуя за взломщиком робот-охранник по инфракрасным маякам в наручниках и стенном замке пристегнет наручник взломщика цепью к стенному замку.
Чтоб взломщик понял куда двинуть ножками – матричный шокер наручников ног, включающий электроды в наручниках ног на задних, по отношению к стенному замку, электродах ноги. Для определения задних по отношению к стенному замку электродов наручников используем 2-ю пару синхронизированных часов точного времени с другой несущей частотой в наручниках ног, в роботе-охраннике.
Робот-охранник передает свое время задержки сигнала компьютерам наручников ног. Методом триангуляции компьютеры наручников ног определят где в каждом наручнике ног находятся задние электроды.
Робот глушит вопли взломщика сообщнику: «антишум в противофазе» + «шум холодильника». Оснащение: электрошокер стреляющий иглами с металлизированными пластиковыми нитями, пневмопистолет, штурмовой фонарь-вспышка ослепляющий взломщика
РОБОТ-ПОВАР: кухонный робот-повар: 4-колесный робот с 2 руками в вращающейся башне: робот-кентавр. Робот раскладывает заранее заготовленные куски мяса, специй в сковородке. Наполнив водой кастрюлю, швыряет в нее продукты идентифицированные радиочастотным кодом или прощупанные трансформаторными датчиками вихревых токов в кончиках пальцев. Варит по программе.
В определенное время выключив плиту разложит человечье топливо в тарелках. Навигация робота: по инфракрасным (разносигнальные сигналы точного времени), ультразвуковым (разночастотный сигнал точного времени) маякам в потолке кухни, спектральные отражатели-маяки внутри холодильника
РОБОТ-ДОМАШНИЙ СТОЛ: 4 ноги с приводом + навигатор (по цифровым маякам-ответчикам в потолках) чтоб прибежать в нужную комнату, встать в свое место по голосовому управлению
ТЕЛЕРОБОТ-ДВОРНИК: робот-дворник-снегоуборщик с пылесосом, вращающейся щеткой, бульдозерным отвалом (навесное оборудование), манипулятором (с электрошокером, телекамерой в захвате), с 2 стоящими по бокам на поднимающихся рычагах телекамерами в одном корпусе с прожекторами, с совмещенным стереомикрофоном, с динамиком, с сиреной
РОБОТ-ОХРАННИК: летающий робот-оса с электрошокером (шприц с снотворным)
ПРОТИВОМИННЫЙ РОБОТ: впереди танка с пехотой едут 4-колесные противоминные роботы, вибратором нанося периодически удары по подшипникам 4-х колес, чтоб взорвать мину
РОБОТ-ТАНК: у наземных танков-роботов конический (больше ресурс) ствол пушки. Конический ствол дешевле всего шлифовать из трубы внутри под конус алмазным кругом. Чем меньше диаметр ствола, тем больше требуется точность шлифовки ствола, хуже жесткость длинной штанги (у штанги жесткая опора в обоих концах) шлифовального круга – надо больше высококвалифицированных человеко-часов для получения требуемой точности размеров. Больше диаметр ствола – дешевле по оплате труда изготовление. После попадания снаряда в танк лазер совмещенный с телекамерой автоматически калибрует датчики наводки пушки на цель
РОБОТ-ИНКАСАТОР: гибель или участие инкассаторов в ограблениях ведёт к роботизации: деньги в пожаробезопасном контейнере с композитной броней, электронным замком. У Банка работник банка (не инкассатор: доверять нельзя) радиопаролем откроет бронедверь инкассаторского автомобиля, включит телеуправление робот-контейнеровоза рентгеновскими лучами.
Радиопароли отправитель передает банку через Интернет сразу после сообщения банка о прибытии инкассаторского автомобиля к адресату. Пароль в банк отправитель дает частями через десятки сайтов. Нужно знать где в тексте, в какой последовательности сайтов фрагменты пароля.
Человек с банка телеуправлением спускает с автомобиля на лифте немагнитный робот-контейнеровоз в форме кубика (минимальная поверхность брони) на колесах. Робот с деньгами едет к бронешлюзу. Шлет ультразвуковой, инфракрасный и радиопароль шлюзу. Проедет автоматическую бронедверь радиопоглощающего шлюза: дверь закрывается.
Рентгеновские, ультрафиолетовые, инфракрасные, магннитные сканеры, телекамеры осмотрят 6 граней робота: проверка средств взлома, соответствия размеров стандарту. Взломщиками банка могут оказаться инкассаторы.
Робот включит пароль-2. Задняя бронедверь шлюза закроется, передняя бронедверь-2 шлюза откроется. Проедет: бронедверь-2 закроется. Робот ставит контейнер, выедет в двери шлюза обратно в лифт инкассаторского автомобиля.
Вариант-2: автомобиль с деньгами въезжает в банк на пол с множеством роликов. Выдвигающиеся вверх 2 штыри фиксируют задний мост автомобиля
АВТОМОЕЧНЫЙ РОБОТ с обратной 3D-связью по расстоянию до поверхности автомобиля. В каждой координате отдельный радиодальномер на своей частоте управляет рычажным манипулятором с 2 противовращающимися щетками. Привод уравниванием (поворот рычага) сигналов датчиков момента щеток выравнивает их в омываемой поверхности. Датчики тормозного момента дублированы микрофонами по принципу равенства мощности звука в диапазонах частот. Выбор алгоритмов приоритета датчиков
РОБОТ-ЛОГИСТИК: робокары с 2 руками в вращающейся башне + грузовой кузов с тензометрическими весами сзади. Робокар регулирует высоту кузова.
Робокар шагает вбок: подъехав боком к небольшому пространству между 2 объектами робокар по диагонали-1 приподнимает 2 колеса, двигает их вбок на 5см. Опираясь на эти колеса робокар по диагонали-2 поднимет другие 2 колеса, двинет их вбок на 5см. Шагая вбок робокар проходит боком в узком пространстве между 2 объектами
РОБОТ В ВАННОЙ: вода в человека в ванной летит с длинного 4-звенного манипулятора робота в ванной. Радиодатчики манипулятора определят местонахождение головы человека. Софт струей воды манипулятора обходит вокруг головы по установкам (температура, алгоритм) софта. Софт держит постоянными температуру, расход воды.
Сработали 3 из 4 датчиков воды в углах пола: софт голосом сообщит: затопление.
Человек нажал кнопку: манипулятор проходит струей периметр стенки ванной. Края ванной с полукруглым антиволновым профилем края стенки
РОБОТАРАКАН-ШПИОН: телекамера + защита от тапка + зарядка аккумулятора энергией Wi-Fi. Усики таракана – антенны съёма энергии поля Wi-Fi, телеуправления тараканом (мобила). Роботаракан взбегая на стену делает шпионские фото. Прыжок на пол, бег в укромное место (карта укромных мест) от тапков рязъяренных фотомоделей.
При уменьшении размеров моделей, роботов растут проблемы с трением, с точностью изготовления, с прочностью материалов, уходит много времени. Размеры моделей, роботов лучше увеличить. Законченную конструкцию последовательно уменьшают с подбором более твердых жестких материалов.
У промышленных роботов скачет ускорение. 3D-датчики ускорения обратной связью с приводами ограничат ускорения по принципу: мощность робота постоянна + использование инерции робота, гравитации для регенерации энергии..
Подъемный кран-робот в строящихся зданиях поочередно своими 4 ногами переползает по спирали с одной точки крепления кран-робота в другую. Закрепляется
24) РОБОПЫЛЕСОС: робот-пылесос для стен. Маховик: центробежный вакуумный насос убирающий пыль. При раскрутке с розетки маховика вход насоса герметично закрыт клапаном с электроприводом. Открыт только выход насоса на 0,1% выходного сечения = вакуум для маховика = меньше сопротивления воздуха для маховика.
У робот-пылесоса 4 ведущих колеса. 4 вакуумные юбки, как в автогонках. 4 вакуумные юбки через прогрессивную подвеску, транзисторно-электромагнитные амортизаторы связаны с продольными рычагами подвески колес. Робот подъезжает к стене, двигает вперед на рычагах передние колеса, перенося вес на задние колеса. Передними колесами медленно плавно поднимается на стенку, включив вакуум в зоне задних колес. Затем стены касаются задние колеса.
Робот поднимается по стене, присасываясь к стенке вакуумом между 4-мя юбками. Робот-пылесос заберется на любую высоту стены небоскреба. Снабженный манипулятором с телекамерой робот глянет в любое окно небоскреба. Свалится с стены небоскреба: по сигналу датчика нулевого ускорения пирозаряд выстрелит парашют. Внутри выброшенного парашюта с малыми интервалами, чтоб не порвать купол, сработают 32 пирозаряда.
Пирозаряд-1 самый слабый, чтоб не сжечь купол, создаёт зазор 0,12см. Пирозаряды на конце троса, прикрепленного к верхней центральной части купола парашюта. Пирозаряд-2 включается по таймеру при зазоре 0,12см. Объем зазора, повышенное давление уменьшает ударные, тепловые нагрузки парашюта от более мощного пирозаряда-2.
Еще более мощный пирозаряд-3 включается от таймера при зазоре в 0,2см. Аналогично остальные, все более мощные пирозаряды. 0,2сек: купол раскрыт. Аналогична конструкция мгновенно раскрываемого парашюта спасения человека с горящего небоскреба.
Робот подтягивая стропы парашюта управляет вектором своего движения сигналами инфракрасных дальномеров. Инфракрасные излучатели работают последовательно в углах робота. Инфракрасные приемники в углах робота. Направление на препятствие – по разности времени прихода отраженного луча на 2 приемника.
Сигнал инфракрасного дальномера: справа препятствие (провода, стена) – робот, подтягивая строп парашюта с противоположной стороны, уйдет от препятствия.
4 стропа парашюта закреплены в углах робота возле колес, чтоб не раскачивался в спуске на парашюте. 4 стропа парашюта уложены в щели в корпусе робота. Щели для строп закрыты лаком, выдавливаемым вместе с стропом линейным пирозарядом под стропом по всей его длине. Линейный пирозаряд: пирозарядная нить с диаметром равным диаметру стропа, который она выдавливает из щели шириной в диаметр стропа.
Вариант: приклеенные к плоской, без щели, поверхности робота ленточные стропы парашюта, наклеены сверху на ленточные пирозаряды. Приводами строп парашюта управляют электромагнитные транзисторные муфты сцепления, перекачивая электропроводами крутящий момент с маховика – накопителя энергии робота на электродвигатели колес робота, повернутых вправо (лево). Или наоборот.
Крутящий момент идет в корпус робота. От корпуса робота момент колес передается в стропы парашюта, управляя вектором движения робота в воздухе.
Функция психологической разгрузки домашнего робопылесоса: при пинке в зад робопылесос недовольным визгом «…тупой баран, глупый пингвин…» посылает хозяина. Переключатель на женщин «…овца тупорылая, глупая телка…». Установка новых фраз, уровня визгливости недовольства голоса робота.
Домашний паровой робот-пылесос на зарядке нагреет на зарядке до 120°С под давлением в закрытом баке-термосе воду. Пар крутит турбину, все механизмы парового робот-пылесоса. В комнате по телекамере и спектральным датчикам обработает сильной струей пара (паровой турбодетандер вернет часть энергии) темные пятна с данной фактурой, цветом (база данных фактур, цвета)
25) РОБОШЛАНГ ПОЖАРНЫХ, ЗАПРАВЩИКОВ: (статье 5 раз вредили) роботизированный шланг-манипулятор с силовой отрицательной обратной связью на движения рук заправщика вчетверо уменьшает время заправки бензобака, делает ненужным второго человека-заправщика.
Шланг разделен на секции-сильфоны. Сильфон: металлическая круглая труба-гармошка. К каждой секции-сильфону с обеих сторон припаяна труба-секция длиной в половину секции-сильфона.
На свободном конце трубы-секции фланец в виде кольцевого конуса с плоским торцем. Кольцевой конус имеет в радиально-осевом сечении клиновое сечение с углом 15° к радиусу. Две трубы-секции соединят между собой фланцы с клиновидным сечением.
Для их соединения их обжимают двумя болтами-1-2 в радиальном направлении два полукольца-1-2 с аналогичным клиновым сечением. Полукольца-1-2 в собранном болтами-1-2 виде это Карданный вал-1 с вырезами для совместной работы с точно такими же Карданными валами-2-3. Вырезы в карданных трубах обеспечивают достаточный угол взаимного поворота секций-сильфонов.
Карданный вал-1 это труба с отверстиями-1-2-3-4 для карданных осей, точнее полуосей-1-2-3-4: между соосными полуосями проходит шланг. В левой части Карданного вала-1 карданная ось горизонтальна, в правой части Карданного вала-1 карданная ось вертикальна. Карданный вал-1 разрезан вдоль его осевой линии на 2 половинки-1-2. Разрезан плоскостью под углом 45° к горизонтальной плоскости.
В центре половинки-1 полукольцо-1 с клиновым сечением. В центре половинки-2 полукольцо-2 с клиновым сечением. Половинки одинаковы, взаимозаменяемы.
Сборка: концы секций-сильфонов-1-2 прижмут фланцами-1-2 друг к другу. Между фланцами-1-2 герметизирующая прокладка. Одевают на клиновое сечение фланцев-1-2 половинки-1-2 Карданного вала-1. Стягивают половинки-1-2 Карданного вала-1 двумя болтами так, чтоб клиновое сечение половинок-1-2 Карданного вала-1 сильно зажало фланцы-1-2, герметизируя стык между ними. Так все секции-сильфонов соединят в длинный робошланг.
Четные Карданные валы своим внутренним диаметром одеваются на внешний диаметр нечетных Карданных валов. Их соединяют в сеть карданных валов робошланга полуоси-1-2-3-4 завинчиваемые на резьбу в отверстиях-1-2-3-4 нечетных Карданных валов. На полуосях-1-2-3-4 поворачиваются четные Карданные валы. На полуосях-1-2-3-4 поворачиваются шкивы для тросов.
Если робошланг состоит из 10 карданных валов тогда: у основания робошланга на каждую карданную полуось одеты 11 шкивов для тросов. На каждую последующую пару полуосей одето с одной стороны на 1 шкив меньше.
Внутренние шкивы соединены снаружи с своим карданным валом, с концом своего троса. Один трос может проходить через несколько шкивов, пока не дойдет до шкива на котором крепится его конец. 2 троса обеспечат точное силовое перемещение робошланга по 1 степени свободы.
Привод всех тросов от маховичного привода у основания робошланга. На заправочной трубе робошланга в форме квадратных колец по бокам справа, слева закреплены квадратные кольца-ручки с датчиками силы. Когда человек жмет на правую или левую ручку робошланга сработают датчики силы, двигая приводом робошланг в направлении, в каком жмёт на датчики силы человек.
Легко перемещаясь вбок от датчиков робошланг остается жесткой конструкцией для всех внешних и внутренних силовых воздействий на шланг, не касающихся датчиков силы в ручках: робошлангом вручную (многотонные нагрузки) человек подает сверхдальнюю струю воды на пожаре.
Кривые усиления движений заправщика обратной силовой связью отдельно по каждой степени свободы можно установить в софте робошланга. В вертикальной составляющей усиление силовой обратной связи максимально при движении робошланга вверх.
Робошланг заправки самолетов на земле, в воздухе. 1980-е: в термоизолированный бак на 220л автомобилей F1 заливали 245л охлажденного (уменьшается объем) до минус 30°C топлива
ПОЖАРНЫЙ РОБОТ-ЗМЕЯ GE2.0: пожарные гибнут от обрушение перекрытий. Вместо пожарного автомобиль с длинным пожарным адаптивным робот-змеёй с подачей в него огнетушащей жидкости (газа). Робот-змея состоит из десятков одинаковых рычагов длиной 0,3м, сложенных компактно в гармошку в стартовом положении.
При выдвижении вперёд робот-змеи вначале выдвигается вперёд 1-й от брандсбойта рычаг-1. Рычаг-1 доходит до продольной оси гармошки рычагов, далее двигается вдоль этой оси за счёт раскрытия рычага-2. Рычаг-2 доходит до продольной оси гармошки рычагов, далее двигается вдоль этой оси за счёт раскрытия рычага-3. И так далее пока не раскроются все рычаги сложенные в гармошку.
Брандсбойт с 2 встроенными в него телекамерами выдвинут в самое дальнее положение. Телекамеры брандсбойта работают в терагерцовом диапазоне или в длинноволновой части инфракрасного диапазона картинки чтоб видеть в дыму пожара. Возвращение назад брандсбойта в аналогичном порядке. Вначале складываются в гармошку самые дальние от брандсбойта рычаги. Затем поочередно последующие рычаги.
Привод всех рычагов от тросов маховичного привода в неподвижном основании робота-змеи. Тросы привода идут через шкивы в осях рычагах. Каждый рычаг поворачивается вокруг вертикальной, горизонтальной осей. В каждом рычаге робота-змеи возле шарнира 4 инфракрасных (терагерцовых) излучателя + 4 инфракрасных (терагерцовых) приемника кругового датчика расстояния. Их дублируют ультразвуковые датчики расстояния.
Полученная круговым датчиком расстояния информация идет в компьютер пожарного автомобиля по кабелю и дублирующей инфракрасной линии связи внутри корпуса рычагов робота-змеи. Наружный свет внутрь корпусов рычагов не попадает.
Софт приводами робота-змеи управляет пространственным положением шарниров в движении в проемах здания. Софт управляет рычагами робота-змеи по принципу: с каждой стороны шарнира манипулятора расстояние до проема, до ближайшего предмета такое же, как в противоположном направлении.
Робот-змея быстро проходит вентиляционные шахты здания, другие проемы горящего здания (адаптивная обратная связь). Если робот длинный в дальней от машины половине рычагов используем турбинный маховичный привод в каждом четном рычаге.
Подаваемая в зону пожара огнетушащая жидкость (газ) крутят турбину маховика привода, поддерживая обороты постоянными. Старт турбины воздухом по тому же трубопроводу, по которому идет огнетушащая жидкость (газ).
В каждом нечетном члене пожарного манипулятора привод стыковки-расстыковки турбинных рычагов робот-змеи. Привод стыковки-расстыковки рычагов робот-змеи работает от маховичного привода. Привод стыковки-расстыковки рычагов робот-змеи расстыковывает заваленные перекрытиями здания рычаги робота-змеи.
После завала проема перекрытием здания софт по данным 3D-датчиков ускорения в рычагах расстыковывает ближайший к завалу подвижный рычаг робот-змеи член с стороны пожарной машины. После расстыковки рычагов робота-змеи, его оставшаяся часть отводится к телеуправляемой пожарной машине.
Пожарный телеуправлением подсоединит запчасти робота-змеи с телеуправляемой пожарной машины снабжения с 2 монтажными манипуляторами-руками от андроида Айзек. Оператор машины снабжения находясь вдали в пожарной части манипуляторами, приводом стыковки-расстыковки рычагов робот-змеи подсоединит запчасти к роботу-змее.
Телеуправляемая машина снабжения заправит пожарную машину с роботом-змеёй заправочным робошлангом с инфракрасной телекамерой в заправочном пистолете герметичного соединения.
Телекамера, инфракрасные круговые датчики расстояния робот-змеи охлаждает подаваемая в зону пожара огнегасящая жидкость (газ). Экспедитор, пожарный работают не выходя из дома, переключив монитор телевизора в криптозащищенный рабочий режим.
Вариант-2: пожарный робот-змея летает на пожаре с реактивными ранцами по длине шланга с водой
РОБОШТАНГА ТЕЛЕКАМЕРЫ: выдвижная адаптивная штанга телекамеры из десятков одинаковой длины рычагов. В стартовом положении все рычаги плотно, компактно сложены гармошкой. При выдвижении вперёд телекамеры вначале выдвигается вперёд 1-й от телекамеры рычаг-1. Рычаг-1 доходит до продольной оси гармошки рычагов и далее двигается вдоль этой оси за счёт раскрытия рычага-2. Рычаг-2 доходит до продольной оси гармошки рычагов и далее двигается вдоль этой оси за счёт раскрытия рычага-3. И так далее, пока не раскроются все рычаги сложенные в гармошку.
Телекамера в дальнем положении. Возвращение назад: вначале складываются в гармошку самые дальние от телекамеры рычаги. Затем поочередно последующие рычаги.
Привод всех рычагов от тросов маховично-тросового привода в неподвижном основании штанги. Тросы привода идут по шкивам осей рычагов. Каждый рычаг может поворачиваться не только вокруг вертикальной, горизонтальной оси: штанга с телекамерой по сигналам ультразвуковых, инфракрасных дальномеров в шарнирах каждого рычага штанги в сенсорном режиме огибает любые препятствия (столбы, фермы, перекрытия…)
26)
ПОДВОДНЫЕ, МЕЖКОНТИНЕНТАЛЬНЫЕ, ОРБИТАЛЬНЫЕ ПУШКИ: (статье 10 раз вредили. всё синее удаляли)
торпеда «Шквал»: 100м/с. 1997г: экспериментальная торпеда США достигла скорости 1549м/с (1,5км/с). Скорость звука в воде 1420-1520м/с. В обоих торпедах спереди ракетный двигатель создает встречный поток газов с импульсом равным импульсу встречного потока среды.
Встречный поток воды (газов) с носового ракетного сопла сверхскоростных торпед, создавая на расстоянии 20см от передней части торпеды столкновение между встречными струями равного импульса без ионизации молекул, плавно уводит вбок молекулы встречного потока воды.
На расстоянии 20см безударное обтекание встречным потоком воды передней части торпеды + стабилизация торпеды: при отклонении корпуса торпеды вбок встречный поток воды многотонным ударом об высунувшийся задний бок выровняет торпеду.
Немцы ответили скоростью 800км/ч (торпеда Шквал 500км/ч), приняли на вооружение торпеду «Барракуда» с самонаведением на скорости 400км/ч от фирмы Diehl BGT. Самонаведение дают 8 пьезомикрофонов в конце длинного выдвигающегося пиротолкателем телескопического штыря перед передним соплом. Передний конец штыря: Х-образный жесткий профиль в пазах которого 8 пьезомикрофонов.
Сигнал 8 микрофонов преобразуется в цифровой сигнал, по лазерному лучу передается внутри телескопического штыря в компьютер торпеды. Энергию аналого-цифровой преобразователь берет с помехового фильтра сигнала микрофонов или с лазерного луча (разделение по времени сигнала, энергопотока) внутри телескопического штыря.
Планки Х-образного штыря имеют клиновидный сужающийся кверху профиль. У планок клиновидность в направлении перпендикулярном оси торпеды. Клиновидные профили в передних концах закруглены (радиус 2мм). На клиновидных гранях плоские пьезомикрофоны.
Сердцевина Х-образного штыря из жесткого материала с высокой скоростью звука: бериллия. На бериллии покрытие из материала с минимальной скоростью звука с толщиной покрытия подогнанной (уровень шума) к противофазе с резонансами (+гармоники) продольных звуковых волн вдоль бериллиевого профиля.
Фильтры софта микрофонов вырезают резонанс-частоты и гармоники конструкции. Шумы одних микрофонов софт удаляет противофазными шумами других микрофонов: линейная решетка микрофонов ниже на гранях Х-образного штыря. Часть микрофонов ловит продольные волны Х-образного штыря. Другая часть микрофонов ловит поперечные волны в Х-образном штыре. Софт по алгоритму обработки поперечных и продольных волн выдает вектор прихода звука от подлодки или надводного корабля.
Продольные волны шума от двигателя торпеды инерционный микрофон в противофазе передает в магнитострикционный привод Х-образного штыря, избавляя его от шума двигателя торпеды.
Россия, США, Германия лгут: скорость якобы от кавитационного пузыря перед торпедой. Кавитация: энергоёмкий процесс схлопывания пузырей водяного пара от резкого понижения давления.
Пузырь перед носовым газогенератором торпеды не кавитационный:
1. на передней и боковой поперхности торпеды кавитации (кавитация это процесс схлопывания пузыря) нет. Кавитация происходит сзади за торпедой, не влияет на её скорость.
2. на поверхности торпеды нет фазы вакуума в пузыре. Носовой газогенератор торпеды Шквал не создает вакуумной фазы. Фаза вакуума в торпедах бывает только в зоне в задней донной части торпеды или на поверхности винта на которую не набегает встречный поток воды.
3. спереди и сбоку торпеды НЕТ фазы заметного нагрева как признака кавитации при схлопывании пузыря.
4. для схлопывания пузырька при кавитации газовая составляющая пузырька должна быть паром этой же жидкости. Либо паром другой (выстреливаемой соплом) жидкости при условии: температура конденсации выше температуры воды. Эти условия не выполнены: газ носового газогенератора торпеды без кавитации всплывает вверх демаскируя торпеду, подлодку.
5. процесс в пузыре перед торпедой не энергоёмкий в сравнению с мощностью торможения потока воды такой же скорости без газогенератора.
6. на максимальной скорости потери на трение меньше 0,01% в любых серийных торпедах. Практически все потери на сопротивление движению любых торпед приходятся на работу закона-2 Ньютона: ударное торможение воды об носовую часть торпеды.
В торпеде на высокой скорости встречный поток резко тормозит ДО НУЛЯ на поверхности торпеды в пограничном слое 0,2мм. Лобовое сопротивление расчитывают по закону-2 Ньютона: F=ma сила лобового сопротивления равна произведению секундной массы воды на тормозное ускорение.
Принцип действия сверхскоростных торпед: в носовой части сопло твердотопливного ракетного двигателя встречного равного импульса. Импульс встречной газовой струи сопла равен импульсу встречного потока воды, давление 2 раза больше. 2 встречных потока расталкивают друг друга вбок по дуге упругими (без ионизации, фазовых переходов) столкновениями молекул газа, воды.
Струя с лобового сопла торпеды с малым градиентом скорости МОЛЕКУЛ ВОДЫ, плавно уменьшает скорость набегающего на поверхность носовой части торпеды потока воды. Суммарная средняя скорость возмущенных молекул воды уменьшается.
Газовая струя носового газогенератора торпеды – это упругая газовая игла заменяющая почти мгновенное ударное торможение воды на 0,2мм плавным поворотом встречного потока воды вбок за лобовое сечение торпеды без контакта молекул с носовой частью торпеды.
99,999% сопротивления скоростной торпеды без носового газогенератора на 500км/ч – потери энергии на закон-2 Ньютона. Потери на трение < 0,001%. Носовой газогенератор снижает сопротивление за счёт защиты от закона-2 Ньютона уменьшением ускорения в формуле F=ma
ЛОБОВОЕ СОПРОТИВЛЕНИЕ ТОРПЕДЫ равно отношению: в числителе число столкновений молекул воды с лобовой поверхностью торпеды (в направлении оси торпеды) умножить на массу молекулы воды, умножить на скорость встречного потока воды; в знаменателе время.
Число столкновений молекул воды с лобовой поверхностью торпеды (в направлении оси торпеды) за единицу времени прямо пропорционально квадрату кинетического давления воды в пограничном слое воды.
Твердотопливный ракетный двигатель встречного равного импульса в носовой части снаряда подводной пушки, увеличит скорость, дальность снаряда, стабилизирует снаряд. При отклонении оси снаряда от вектора торможения встречный поток воды ударом об высунувшийся бок снаряда вернёт его в правильное положение.
Снаряд подводной пушки с бесконтактным взрывателем подобьёт подлодку или отраженный от неё звук демаскирует её координаты (разнесенные микрофоны) для следующего выстрела. Подводные пушки гидроботов перестреляют подводные лодки. Гидроботы с ИИ заменят подлодки. Отсеки гидробота залиты силиконовым маслом. Масло соединено с забортной водой через стенки гибкого армированного мешка или сильфон. Через мешок или сильфон давление снаружи, изнутри гидробота уравнено – нет ограничений глубины погружения.
Встречную газовую струю торпед лучше заменить встречной струёй воды с давлением вдвое больше динамического давления встречной среды. Это уберёт демаскирующие пузыри от носового встречного ракетного двигателя, сильно снизит шум торпеды; меньше требований к жаропрочности, теплоемкости материалов конструкции.
Газовая струя ограничивает глубину работы торпеды Шквал до 30 метров, дальше разность давлений «сопло – среда» слишком мала для увода вбок молекул встречного потока воды. Водяная струя вместо газовой в 20 раз увеличит глубину скоростного режима торпеды, делает бесшумной.
Подводные лодки с помощью встречной водяной струи увеличат скорость, сократят расход топлива. Воду для струи подлодка берет длинными продольными отверстиями по бокам подлодки. Аналогично у торпед
СИСТЕМА ВСТРЕЧНОГО РАВНОГО ИМПУЛЬСА:
1. уменьшает число соударений за 1сек молекул внешней среды с движущимся предметом за счет уменьшения давления в среде перед предметом и увеличения среднего расстояния между молекулами.
2. уменьшает среднюю скорость молекул внешней среды, попавших в лобовое сечение движущегося предмета.
3. уменьшает потери кинетической энергии на инфракрасное излучение (ионизация внешней среды) для молекул внешней среды, попавших в лобовое сечение движущегося предмета.
Для каждого давления молекул внешней среды существует свой критический диапазон скоростей, в котором Система встречного потока окупается за счет снижения сопротивления среды
МЕЖКОНТИНЕНТАЛЬНЫЕ ПУШКИ отправят на свалку Эволюции ракеты, кроме космических ракет-носителей. Вместо ракет охлаждённые жидким азотом снаряды: противоракетная оборона ПРО не перехватит. В полете снаряд сенсорными (обратная связь «температура – расход азота») клапанами сбрасывая азот через пористую оболочку, уравнивает температуру оболочки с температурой неподвижной окружающей среды, для инфракрасной невидимости на экране тепловизора. Снаряды с искусственным интеллектом перед целью будут маневрировать по конической спирали с переменным шагом для прорыва ПРО.
Физика, технология носового сопла твердотопливного ракетного двигателя равного импульса работают в снарядах обычных пушек, летящих в воздухе. Превращая корабельные пушки в межконтинентальные пушки (они в забортной воде для охлаждения, демпфирования колебаний, инерционной разгрузки ствола).
Перед выстрелом ствол закрыт сверху тонкой воздухонепроницаемой мембраной. Полость ствола соединят с вакуумным баком корабля для создания вакуума спереди снаряда.
Межконтинентальная пушка длиной 300м выстрелит активно-реактивным снарядом вверх на 180км + тысячи км без сопротивления воздуха. Носовой твердотопливный ракетный двигатель равного импульса работает только в плотных (обратная связь с датчиком давления) слоях атмосферы. Для демпфирования колебаний, для охлаждения пушка с поплавком в воде, наклон на угол 45°. Ствол внутри сужается к верху.
Перед выстрелом для накопления энергии твердое высокотемпературное спецтопливо газогенератора снаряда греют с обратной связью с датчиком температуры топлива снаряда. Газы взрывомагнитного генератора-1 тока разгонят снаряд до 2км/с.
Конденсаторное или акустоэлектронное реле включит взрывомагнитный генератор-2. Его газы ускорят снаряд до 3км/с. Импульс тока генераторов медленно растет, быстро спадает, чтоб получить постоянный ток в индуктивности без диодов. Индуктивность: накопитель энергии, фильтр вырезающий вредные (нагрев вихревыми токами) высокие частоты. Энергия индуктивности ускоряющими обмотками снаружи ствола, ускорит снаряд. Параллельные конденсаторы ускоряющих обмоток шунтируют паразитные ВЧ-токи для защиты микропроцессора снаряда.
Вихревые токи Фуко не вредят микропроцессору снаряда: ферритовая стенка снаружи + медный экран под ним, напряжение питания больше напряжения индуцированных вихревых токов в компьютере. Некоторые контролеры электродвигателей сегодня работают на напряжении 500V.
Проводники, полупроводники микропроцесора снаряда окружены ферритом. Часть-1 энергии перемещает электромагнитная волна. Часть-2: движение электронного газа молекул. Часть-3 энергии перемещает механическая энергия (ток смещения) продольных волн внешних электронных оболочек атомов.
Перераспределение энергии между электромагнитной, механической формами энергии уменьшает вероятность пробоя изоляции электроцепи. Для микропроцессора на 600000-2000000V даже для постоянного (несимметричного треугольного пульсирующего) тока не нужны проводники: импульсы перемещает ток смещения в диэлектрике. В роли проводника диэлектрик с неплотной упаковкой электронных оболочек молекулы: элементы групп-1-2 таблицы Менделеева.
В микропроцессоре переменного тока на 600000-1000000V нет гальванически замкнутых электрических цепей. Схема работает на токе смещения диэлектрика от пьезогенератора + ток поляризации + пьезотрансформатор. Такой микропроцессор в работе не почувствует взорванную рядом электромагнитную бомбу.
От нейтронов, рентгеновского и гамма излучений термоядерных взрывов, от космических лучей, солнечных бурь микропроцессоры защищают так, как защищают от радиации близких атомных взрывов борткомпьютеры ядерных ракет: покрытие из сплава изотопов металлов гадолиний-157Gd, эрбий-167Er.
Ускорение снаряда не действует на микропроцессор благодаря высокому напряжению: управляющая сила транзисторов действующая на электрон прямо пропорциональна напряжению.
Выстрел: по сигналу датчика ускорения таймер включит компьютер снаряда. В носовой части снаряда 7 твердотопливных зарядов ракетного двигателя равного встречного импульса. Импульс встречной ракетной струи равен импульсу встречного потока воздуха, давление 2-3 раза больше, расход меньше.
Встречная струя двигателя (упругая газовая игла) тонкая, длинная, плавно по радиусу заворачивает вбок встречный поток воздуха. Сигнал датчика давления включает новые секции твердотопливных зарядов, подгоняя (по анализу звука микрофона софтом или по сигналу датчика тормозного ускорения) двойным коэффициентом давление сопла встречного ракетного двигателя к давлению встречного потока воздуха
Стабилизация: отклонится от вектора торможения продольная ось снаряда – торможение встречного потока об высунувшийся бок снаряда вернет его в правильное положение. Диаметр сопла встречного ракетного двигателя 4-6 раз меньше диаметра снаряда.
Сопротивление воздуха 20 раз (4км вместо 81км) уменьшает дальность выстрела винтовочной пули 900м/сек. Снаряд пушки 5 раз быстрее. От сопротивления воздуха потеря дальности снаряда – в степени-2 от скорости. Дальность полета снаряда из-за сопротивления воздуха меньше в 40 раз. Встречный ракетный двигатель (упругая газовая игла) 20 раз уменьшит потерю дальности снаряда от сопротивления воздуха.
Сила лобового сопротивления снаряда без встречного ракетного двигателя = силе торможения гиперзвукового (5км/сек) встречного потока воздуха до нуля на расстоянии толщины (0,005мм) ударной волновой поверхности: F=ma. Сила лобового сопротивления = секундной массе встречного потока воздуха длиной 5км умноженной на тормозное ускорение.
Секундная масса воздуха = плотность воздуха умножить на секундный объем встречного потока воздуха длиной 5км. Столба воздуха диаметр равен диаметру снаряда. Секундный объем встречного потока воздуха = произведению числа-Пи = 3,14 на секундную длину воздушного столба 5км, на квадрат половины диаметра столба воздуха. Секундный объем встречного потока воздуха =3,14 умножить на 5000м и на диаметр снаряда.
Встречная струя носового газогенератора снаряда в разы снизит температуру снаряда, уменьшая энергию торможения воздуха в столько раз, сколько раз снизилось сопротивление воздуха. Меньше энергия торможения воздуха – меньше тепловыделение. Встречный ракетный двигатель снаряда работает на взлете до высоты 40км. На 40км (ниже КПД заднего двигателя меньше) включается на минуту задний ракетный двигатель снаряда.
Подлодки с межконтинентальными пушками + снаряды с искусственным интеллектом + межконтинентальные пушки замаскированные под водоемы
КОСМИЧЕСКИЙ ЧЕЛНОК не нужно защищать от 1560°C абляционной теплозащитой. Спуск с орбиты: с сопел в крыльях, с носа челнока – встречные струи углекислого газа (азот) с баллона (генератора). Или встречные твердотопливные ракетные двигатели. Нет ударного торможения воздуха атмосферы Земли – нет 1560°C (эффект охлаждения) – космические челноки не сгорят в спуске.
Отклонится от вектора торможения продольная ось челнока – гиперзвуковое ударное торможение встречного потока многотонным ударом об едва высунувшийся задний бок вернет челнок в правильное положение. С орбиты на парашюте, на высоте 20км отбрасывается парашют, выдвигаются крылья
БЕСШУМНЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ: встречные струи воздуха равного импульса с сопел передней кромки крыльев, фюзеляжа самолёта увеличивают толщину ударной волновой поверхности до 2см при сверхзвуковом полёте самолёта. При такой толщине звук ударной волны в сверхзвуковом полёте самолёта не образуется: сверхзвуковые самолёты могут бесшумно летать на сверхзвуковой скорости над городами.
Звук ударной волны в сверхзвуковом полёте образует сильное сжатие воздуха в ударной волновой поверхности толщиной 0,005мм (пять тысячных миллиметра).
Сильно сжатый воздух, выходя с зоны сжатия мгновенно увеличиваясь в объеме тысячи раз, создет Z-образный звук ударной волны. При сильном скачке давления даже небольшая площадь ударной волновой поверхности создает мощный звук.
Встречные струи воздуха равного импульса с сопел передней кромки крыльев, фюзеляжа самолёта в разы уменьшают лобовое сопротивление воздуху самолёта в сверхзвуковых скоростях, в разы снизят расход топлива на сверхзвуке.
Упругие (без ионизации) соударения молекул воздуха рассеивают в форме тепла, электромагнитных волн в сотни раз меньше энергии, чем неупругие жесткие удары молекул воздуха об твердую (кристаллическая решетка) поверхность. Неупругие соударения молекул создают радиационные потери кинетической энергии в волновом фронте ударной волны.
По закону-2 Ньютона F=ma сила лобового сопротивления самолета в сверхзвуковых скоростях при отсутствии струйной системы равна силе торможения сверхзвукового встречного потока воздуха до нуля на расстоянии толщины ударной волновой поверхности 0,005мм.
Сила лобового сопротивления равна произведению секундной массы встречного потока воздуха и тормозного ускорения. Секундная масса воздуха равна произведению плотности воздуха на секундный объем встречного потока воздуха в тормозной лобовой поверхности самолёта.
Струйная система бесшумного снижения лобового сопротивления воздуха в разы увеличит дальность полета сверхзвукового самолета. Чем больше сверхзвуковая скорость самолёта, ниже высота полёта, тем больше экономия топлива.
Самолёт бесшумно летит на всем диапазоне сверхзвуковых скоростей, высот. Воздух для сопел равного импульса передней кромки крыльев, фюзеляжа идет с компрессора двигателя самолёта
ПУШЕЧНАЯ ПРОТИВОРАКЕТНАЯ ОБОРОНА с ракетными снарядами. Стабилизация носовым газогенератором снарядов, пуль означает: нарезное оружие исчезнет
ОРБИТАЛЬНАЯ ПУШКА закинет хрупкие грузы на орбиту вмороженными снаружи, изнутри в лед специальной жидкости. Жидкость не меняет объем при затвердевании, испаряется в вакууме. Для демпфирования колебаний, охлаждения пушка с поплавком в воде, наклон на угол 45°.
Встречный ракетный двигатель снаряда работает на взлёте до высоты 40км. На 40км (ниже КПД заднего двигателя меньше) включается задний ракетный двигатель снаряда, выводя его на точку перехвата орбитальным буксиром. Управление снарядом берёт компьютер космического буксира радиоканалом, инфракрасным каналом.
Данные начальной траектории снаряда идут с Земли. Выровняв с собой скорость, вектор движения снаряда, буксир манипулятором отправит его в грузоотсек. Набрав отсек снарядами с грузами буксир везёт в орбитальную базу.
Орбитальная пушка вкопана в лунный грунт. Снаряды из твёрдого горючего (например углерод) или твердого окислителя. В снаряде перед стартом теплоизолированный графит или карбид бора до 2800°C под давлением газа аргона греет микроволновая печь. Графит нагретый до 3400°C хранит в себе энергию 12000ккал/кг. Теплота сгорания графита: 7500ккал/кг.
АЭРОДИНАМИЧЕСКАЯ ИГЛА (после старта пирозаряд выдвигает телескопический шест из 7 труб) морской ядерной ракеты «Трайдент-2» увеличила дальность ракеты на 550км. В конце аэродинамической иглы абсолютно плоский спереди маленький диск. Диск сжимая встречный поток дает ему поперечную скорость. Поперечный поток воздуха плавно уводит вбок молекулы встречного потока воздуха, не касающиеся диска в лобовой проекции. При расстоянии 1,5м от передней поверхности диска на выдвижной шесте до передней части корпуса ракеты, встречный поток обходит без лобового сверхзвукового удара переднюю часть ракеты
ЭЛЕКТРОМАГНИТНЫЙ ОРБИТАЛЬНЫЙ БУКСИР: тормозной парус из электропроводной спирали на спускаемом объекте. Когда объект приближается буксир треугольным медленно нарастающим, быстро спадающим импульсом притягивает к себе парус с объектом, сообщая ему тормозной механический импульс схода с орбиты. И одновременно без топлива разгоняясь сам.
Когда объект отдаляется электромагнитный орбитальный буксир треугольными, быстро нарастающими медленно спадающими электромагнитными встречными импульсами, сообщает тормозному парусу с объектом толкающий тормозной механический импульс схода с орбиты. Одновременно буксир без топлива разгоняется сам.
Энергия генератору электромагнитных волн электромагнитного орбитального буксира идет с его супермаховика с магнитным подвесом. Маховик заряжают солнечные батареи.
В патрулируемой точке траектории снаряда-вертолета раскрываются 3 вертолетных лопастей вала, вращаемого электроприводом. Летая вертолетом снаряд телекамерой дает картинку спутниковой связью
27)
ПРОМЫШЛЕННАЯ ЛУННАЯ БАЗА: (статье 13 раз вредили) самые важные космические проекты:
1. Промышленная лунная база – полигон доводки костюмов телеприсутствия и андроидов, экзоскелетов; техники работающей в широком диапазоне давлений, температур, радиации.
Производство сверхбольших ракет, ракетных двигателей и топлива. На глубине 1м и ниже постоянная температура -30°С.
Еда от расположенных в глубине 20м роботизированных теплиц с углекислым газом + идеальный спектр светильников. В теплицах работают андроиды.
Растения растут быстрее под светом ультрафиолетовых светодиодов. Растениям теплиц Луны нужны легкие элементы, испарившиеся с поверхности: добудут в шахтах, под молодыми кратерами, на Луну сбросят кометы
2. выращивание синтетических мяса, фруктов, овощей с клеток в питательном растворе: 1кг мяса по этому способу стоит пока 15 раз дороже. На Луне усовершенствуется технология максимального производства пищи с 1куб.м. Лунная база уменьшит занимаемые сельским хозяйством площади на Земле – можно прокормить 600млрд чел.
3. в подлунном городе с костюмов телеприсутствия люди управляют универсальными андроидами в цехах лунной промышленности
4. вакуумные технологии сварки, обогащения и выплавки материалов; производство чипов и вакуумных 3D-принтеров. Горячие вакуумные цеха. Для производства солнечных батарей нужен вакуум. Массовое производство инфракрасных матриц тепловизоров требует высокий вакуум 400 часов, дорогие материалы. Массовое производство на Луне инфракрасных матриц автомобильных тепловизоров
5. высокая температура плавления мешает на Земле получить стекла с окислов титана, циркония, гафния. На Луне (вакуум + сила тяжести 6 раз меньше) получать плавкой окислы титана, циркония, гафния в магнитном поле 100 раз дешевле. Вращающееся в трех осях магнитное поле равномерно перемешивает расплавленный материал смеси легких, тяжелых химических элементов
6. на Луне (сила тяжести 6 раз меньше) монокристаллы ~3-5 раз больше чем на Земле. Полученные в невесомости монокристаллы 10 раз больше: с луны в её орбиту запуск автоматизированных капсул для роста без вибраций в невесомости монокристаллов, синтеза новых веществ
7. сброс на Луну ценных астероидов без потерь массы от нагрева в атмосфере. 1500 астероидов для ракет доступнее Луны: в них рутений, родий, рений, палладий, осмий, иридий, платина…
8. в зеркалах телескопов внутренние деформации искажают поверхность зеркал. В созданных на Луне телескопах в разы меньше внутренние деформации (сила тяжести в 6 раз меньше), выше качество картинки, дешевле телескоп. Другим датчикам тоже нужен вакуум, малая гравитация
9. софт искусственного интеллекта космических роботов. Колонизацию Галактики произведут универсальные андроиды с искусственным интеллектом ИИ. Человек заселит построенные андроидами города с работающей инфраструктурой в планетах других звезд.
Софт ИИ – множество узкоспециализированных программ. Когда их число превысит критический уровень достаточно объединить их алгоритмами обобщения и иерархизации алгоритмов, чтоб получить сильный ИИ
10. создание линейки универсальных электроядерных реакторов энергоснабжения планетных баз, космических кораблей
11. орбитальная пушка кидает на орбиту часть грузов активно-реактивными снарядами (груз внутри снаряда весь залит твердым при комнатной температуре топливом для буксира. Буксир подхватывает снаряд, выводит груз в орбиту
ЭТАПЫ СОЗДАНИЯ ЛУННОЙ БАЗЫ
ЭТАП-1: быстродействующая лунная сотовая связь
ЭТАП-2 (наземный): лунный андроид с костюмом телеприсутствия; электронно-лучевой 3D-принтер работающий на плазменно-электромагнитном послойном (электромагнитное управление несколькими элементно-ионными лучами) осаждении металлов на охлаждаемую (полупроводниковым холодильником) подложку
ЭТАП-3 (наземный): постройка вакуумной камеры диаметром 10м, длиной 20м для постройки телеуправляемым андроидом в вакууме электронно-лучевого оборудования минимального веса, разделяющего химические элементы плазменно-электромагнитным способом
ЭТАП-4: луноход обследует территорию вокруг кратера Шеклтон; рентгеноспектральным, нейтронным анализом составит карту природных ископаемых вокруг кратера. По этой информации промышленная лунная база, железные дороги (электровозы с солнечными батареями) к месторождениям
ЭТАП-5: создание с нержавеющих листов лунной базы (на глубине 20м для замедления утечек воздуха) с электронно-лучевым оборудованием. От сейсмической волны близко упавшего астероида марсианские, лунные базы (города) из металлических листов (сварка внахлестку) просто сгибаются, сохраняя герметичность. Другие варианты конструкции базы теряют герметичность – массово гибнут люди.
Управление через костюм телеприсутствия андроидом по лунной сотовой связи с мобильными станциями электрозарядки в годовой эксплуатации 1000 раз дешевле (зарплата, радиационная смена персонала) скафандра. Андроид 4 раза легче человека в скафандре, тратит в 10 раз меньше энергии, в костюме телеприсутствия в 1000 раз больше годовая производительность работы
ЭТАП-6: строительство андроидами горячего цеха. ГОРЯЧИЙ ЦЕХ электронным лучом испарит привезенную лунной железной дорогой породу с рудников, электромагнитным способом разделит превращенную в плазму породу на химические элементы: обогащение урана, редкоземельных металлов. С очищенных элементов андроиды управляемые с костюмов телеприсутствия подлунного города, создадут в вакууме сплавы, произведут с них многотысячетонных космических роботов для бомбардировки Марса против его движения
(приближение орбиты Марса к Земле после гравитационных маневров роботов на других небесных телах)
ледяными астероидами: океан для Марса. Космические роботы будут бомбардировать астероиды с редкоземельными и благородными металлами, урановые и ториевые астероиды по заданным для каждого типа астероида точкам приземления на Марсе по его спутниковой навигационной системе. Уран-ториевые АЭС произведут с воды от комет и оксидов металлов кислород атмосфере Марса. Энергия бомбардировки разогреет Марс
ЭТАП-7: автономность, самоокупаемость лунной базы.
Производимую в лунной базе пищу стерилизует компактный ускоритель. Удар электронов 20Мэв по танталу дает сильный гамма-луч.
Лунные посадочные модули, пристыковываемые тепловые шиты для спуска с 2-й космической скоростью в атмосфере Земли, заправочная станция пристыкованы к безлюдной орбитальной станции с маяками и ретрансляторами на лунной орбите. В безлюдной орбитальной станции в зарядном устройстве закреплен андроид (управляет человек с лунной базы) для ремонта лунных модулей.
Однодневный полет к Луне дешевле трехдневного – меньше зарплата космонавта, радиация, запасы кислорода, пищи. Нужен двухместный космический корабль с увеличенным запасом топлива, летающий к Луне за 1 день: в разы меньшие время, облучение позволит лететь специалистам. Искусственная гравитация – полпути к Луне разгон, полпути торможение.
Себестоимость 1 дня лунной базы меньше, чем орбитальной станции – дольше вахта космонавтов в лунной базе, нет невесомости и радиации, нет расходов на подвоз топлива и пищи (синтетические мясо, фрукты, овощи с клеток в питательном растворе). В орбитальной станции невозможно стирать одежду, бесконечно привозят новую с Земли. В лунной базе нет проблем с стиркой, часто привозить одежду не нужно. В орбитальной станции 100 раз чаще меняют космонавтов из-за невесомости, радиации.
В орбитальной станции чихают 100 раз в день: невесомость – пыль не оседает, на Луне оседает. Земля: концентрация углекислого газа – 0,3мм рт.ст, орбитальная станция – до 6мм рт.ст: головные боли, раздражение, проблемы сна.
Углекислый газ на выдохе не идет вниз от силы тяжести – человек задыхается без мощных вентиляторов, может после сна не проснуться. В орбитальной станции человек не отдыхает из-за круглосуточного постоянного шума мощных вентиляторов, тратящих 60% всей электроэнергии орбитальной станции.
В лунной базе не нужны вентиляторы, огромный расход энергии на них. Нет мощных вентиляторов – нет шума – стоимость года работы человека снижается в разы. Лунная база бесшумна, тратит энергии на человека в разы меньше, единица площади 100 раз дешевле орбитальной станции.
Инфраструктура в лунной силе тяжести 1000-10000 раз дешевле чем в орбитальной станции: унитаз ($20млн) орбитальной станции требует много энергии, лунный не требует. Система жизнеобеспечения СЖО лунной базы 100 раз надежнее проще СЖО орбитальной станции (огромные теплорадиаторы).
Лунной базе грузы не нужны: все элементы таблицы Менделеева у порога базы – расходы вначале в десятки затем в сотни раз меньше орбитальной станции с учетом корректировки орбиты. Со временем в орбитальной станции расходы растут, в лунной базе падают
В лунной базе 1 час работы космонавта 100 раз дешевле чем в орбитальной станции. $200млрд ($6,5млрд в год) ушло в бессмысленную (где доступ к материальным ресурсам Космоса?) МКС, десятки $млн на создание 3D-принтера орбитальной станции из-за невесомости. Таких расходов нет в лунной базе: будет вечной, не упадет, не надо возить топливо коррекции орбиты, волноваться о солнечных вспышках, сходах с орбиты, приливных силах…
Лунной базе не надо много людей – не хватит стройматериалов. Надо 2 ВЫСОКОКВАЛИФИЦИРОВАННЫХ строителя + быстрый лазерный интернет с Землей.
Не нужны сверхтяжелые ракеты-носители: оборудование с деталей массой ~1 тонна везут частям на Луну: стыковка, заправка на орбите. 23000 тонн страны вывели в космос, 7500т космического мусора на орбите, но считают: запуск десятками рейсов 400 тонн (лунная база) на орбиту Земли дороже МКС: 420т.
За половину денег, времени потраченных США на космос после полета Гагарина, инженеры-предприниматели типа Илона Маска к 2025г построили бы лунную промышленность с лунным городом на 100 человек. Осваивать космос должны частные фирмы по госзаказам в форме обобщенной цели.
Из-за идеологических и бюрократических проблем госорганизации действуют не по логике и здравому смыслу. Работа госорганизаций США в Космосе всегда вызывает хохот. Пример: ненужная лунная орбитальная станция США, 4 астронавта в лунном корабле вместо двух, ненужный астронавт в орбитальном модуле после высадки на Луну.
Деньгами на космос должны управлять инженеры, не силовики или ученые. Силовики потратят деньги на торжество их классовой идеологии, ученые на датчики изучения звезд в миллиардах световых лет и поиск жизни.
Вместо строительства лунной промышленности деньги налогоплательщиков после полета Гагарина идут на бессмысленные орбитальные станции (где доступ к неземным материальным ресурсам), поиск жизни инопланетной (каким извращенцам она нужна?), научные датчики (кому нужны звезды в миллиардах световых лет?).
За эти деньги создали бы лунную промышленность производящую микропроцессоры, матрицы инфракрасных и обычных камер, топливо, ракетные двигатели, космических роботов, подлунные города с соединяющими их метро. Товары «Сделано на Луне» в мировом рынке. Промышленный лунный город даст доступ к материальным ресурсам всей Галактики.
Запретить госбюджетную транспортировку вещества небесных тел на Землю: лаборатория исследует техническими датчиками, которые надо уменьшив вес ставить космическим роботам.
МКС не создает инфраструктуру космических кораблей будущего: корабли будут вращающимся цилиндром (диаметр 20м чтоб космонавт не чувствовал вращения) центробежной силой создающим силу тяжести. Требования к роботам МКС: постоянный ток, бесшумность, противопожарные неиспаряющиеся материалы, процессоры устойчивые к радиации.
На Луне мало воды, легких элементов которые замедляя нейтроны выжигают уран-235: его концентрация в лунной руде выше. Добыча урана вакуумно-электромагнитным способом обогащения урана на Луне дешевле, чем на Земле. Атомные электростанции Луны будут создавать радиоактивные изотопы энергомодулей космических кораблей, автоматических станций
КОМНАТЫ, ЗАЛЫ ЛУННОГО ГОРОДА:
1. глубокую шахту для города создаст большая длинная ракета, которая выхлопом ракетных двигателей пробурит глубокую шахту. В эту шахту будут опускать двойные зеркальные трубы-термосы из нержавейки с ребрами жесткости. И сваривать их между собой по торцу.
Ракета приземляется на дно шахты на 4 стержня с опорным диском в нижнем конце стержня. Приводы укорачивают часть стержней чтоб ракета стояла в шахте вертикально. К верхней части ракеты приваривают цилиндр. Баки нижней части ракеты заполняют топливом. Ракета снова стартует вниз. При превышении критической температуры поверхности ракеты двигатели выключаются. Ракета садится на стержни. Повтор процесса пока шахта не достигнет нужной глубины.
Между внешней и внутренней трубами шахты под сверхнизким давлением нетеплопроводный вонючий газ для определения по запаху утечек воздуха. Для определения точки утечки воздуха внутренняя оболочка лунного города покрыта сетью ультразвуковых передатчик-приемников. Пространство между внешней трубой шахты и грунтом засыпет бульдозер.
На нижнем конце трубы освоение пространства будет идти вбок и вниз. Освоение нового пространства для лунного города – это приваривание к шахте новых секций крупных залов из стандартных разнесенных листов нержавейки по принципу термоса
2. лунный город по принципу термоса: зеркальные металлические стенки разделены нетеплопроводным вонючим газом под сверхнизким давлением. Датчики запаха по времени определят точку утечки воздуха. Тепловой насос, система радиаторов дают теплообмен с грунтом
3. подлунный (на глубине 200-1000м: разгерметизация не грозит) город в шаровой полости чистого термоядерного взрыва. Гигантские залы с формой потолка близкой к полусферической.
На белый потолок залов с парками лазерные проекторы проецируют земное небо, на стены земной пейзаж, пейзажи Луны с высоты человеческого глаза (оценка размеров, масштаба) верхних площадок лифтов на поверхности Луны или с вершин лунных гор. Выбор картинок с веб-камер лунного Интернета. В них динамический диапазон яркости видеосигнала смещен вниз для более детального освещения теней. Можно поставив курсор на точку стены-экрана, напечатать цифру (увеличить Х раз). С этим увеличением картинка выйдет на стене.
Это для всех личных комнат лунного персонала, комнат лунных гостиниц, для космических кораблей. Каждый человек вокруг корабля видит всё лучше глаз – телекамеры звездолета – мощные телескопы с защитой от сверхмощных вспышек быстродействующими фотохромными фильтрами на весь диапазон электромагнитных волн
4. в лунном городе центрифуговые костюмы телеприсутствия для путешествий в виртуальные планеты лунной Метавселенной, где сила тяжести больше земной
5. для очистки помещений лунного города от лунной пыли будут (моя идея) использовать парные противостоящие проводящие поверхности, играющие роль электродов. В электроды дают высоковольтные импульсы. В отрицательный электрод будут идти высоковольтные импульсы с резко нарастающей, медленно спадающей амплитудой полупериода колебания. Меняя пары подключаемых к напряжению электродов можно управляя вектором движения лунной пыли, заставить её вылететь через люк наружу.
Очистка скафандров, лунной техники на Луне – жесткий ультрафиолет (рентгеновские импульсы) сдувает с молекул пыли электроны, заряжая пыль положительным зарядом: пылинки отталкиваются друг от друга, очищая поверхности. Тонкий слой слаборадиоактивного изотопа с бета-излучением (излучение электронов) на поверхности лунной техники отталкивает (одноименные заряды) лунную пыль.
Поезда метро к месторождениям. Лунное метро соединит подлунные города: герметичные вагоны с 5-дневным жизнеобеспечения + аварийный передатчик с точными (радиоимпульсная навигация) часами, длинноволновой антенной. Доступ к телескопам (на вершинах лунных гор: меньше пыли) на лунном метро чтоб не поднимать пыль.
Изолированный участок лунного метро в форме окружности готовит к полету на Землю работавших годами на Луне. Замкнутый кольцевой поезд (наклонные рельсы колея 5м) лунного метро с всеми удобствами центробежной силой симулирует земную силу тяжести.
Заводы по производству космических буксиров, ракет-носителей электронно-лучевой (выделяет тепла 4-6 раз меньше аргоно-дуговой сварки, снижает сварочные деформации) сваркой в вакууме
ГОРЯЧИЙ ЦЕХ
Термоизолированный (зеркально-вакуумная теплоизоляция) вакуумный горячий цех на Луне электронным лучом испарит привезенную железной дорогой породу с рудников, вакуумно-электромагнитным способом разделит превращенную в плазму породу на химические элементы: обогащение урана, редкоземельных металлов.
С очищенных элементов создадут в вакууме сплавы, произведут с них многотысячетонных космических роботов-буксировщиков астероидов, комет. Астероиды буксируют сборки ракетных двигателей с вектором тяги направленным к центру масс (корректировка гиродином и по звездам) астероида.
Изготовленные на Луне, доставленные к Марсу орбитальные солнечные зеркала растопят смесь водяного, сухого льда Марса, увеличат давление атмосферы.
Проблему лунной пыли решат механизмы из материалов с высокой твердостью, износостойкостью. Для экономии энергии колеса луноходов большого диаметра, узкие с скользким дисковым ободом чтоб камни по бокам колес не тормозили колеса. 2 колеи на все колеса. Обода колес с шарнирно-пружинной подвеской беговых сегментов колеса. В планетоходах силовой каркас сверху: защита людей от радиации, метеоритов.
Отсутствие силы тяжести в 3D-принтере на орбите или на астероиде с рудниками заменит отталкивающая обмотка вокруг излучателя лазера. Даём в отталкивающую обмотку резко нарастающий, медленно спадающий ток. Электромагнитная индукция прижмет порошок металла к поверхности.
На Луне андроид-геолог с буром, нейтронным и рентгеновским анализатором грунта. Андроид-геолог на Луне просчитав траекторию отправит образцы в алюминиевой гильзе минометом на минометный аэродром лунного города, где компьютер стационарными импульсными обмотками с резко нарастающим, медленно спадающим током плавно приземлит алюминиевую гильзу с образцами. Электромагнитная система посадки электромагнитными волнами от сфокусированных фазированных антенных решеток, спустит космические корабли с лунной орбиты на Луну.
Вывод 1кг груза на орбиту с Луны требует 22 раза меньше топлива. Сырье, энергию солнечных батарей превратят в космических роботов, в ракеты-носители с титановых, алюминиевых сплавов. Роботизированное строительство ракет-носителей на Луне требует 40 раз меньше денег. В запуске грузов с Луны не нужен обтекатель ценой в $млн. Земные ракеты выводят в Космос только людей. Топливо от лунной промышленности: кремний + кислород дают удельный импульс 2,8км/с, алюминий + кислород до 3км/с.
Геостационарные зеркала Луны осветят солнечные батареи Промышленной лунной базы, будут отражателем волн глобального сотового телеуправления лунных роботов.
Промышленная лунная база обеспечит производство ракет, орбитальных буксиров, топлива, работу лунного Интернета будущего через 24 тяжелых Геостационарных спутников связи ГСС.
ГСС – матрица из тысяч приемоизлучающих ячеек. Приемоизлучающая ячейка: излучающий лазер + принимающий телескоп. Лазерный телескоп пользователя в управляемом приводе и лазерный телескоп ГСС самонаводит друг на друга угловая обратная связь: находят друг друга по цифровым номерам излучающих лазеров.
Лазеры (наводка по маякам) геостационарных спутников Луны заряжают энергией батареи спутников, автоматических космических станций, лунных роботов, экзоскелетов.
Станции подзарядки антеннами создают лунную сотовую связь, лунный Интернет, радиомаяковую навигационную сеть колесных, шагающих лунных роботов: триангуляция по радиоимпульсным сигналам точного времени радиомаяков.
Сеть станций подзарядки мобильных лунных роботов + лунная спутниковая система навигации, интернета + орбитальные телескопы поиска нужного объекта на Луне. В солнечных батарей луноходов пирозаряды сдувают пыль с батарей.
Электроэнергию хранят в сверхпроводящем кольце, которое создаст для всей Луны магнитное поле в 100 раз сильнее, чем у Земли. Трансформатор постоянного тока бесконтактно электромагнитной индукцией (ток медленно нарастает, быстро спадает) перекачивает энергию солнечных батарей в вторичную обмотку – сверхпроводящее кольцо. Способ снятия энергии: плавное рост тока в внешней обмотке-В (колебательная схема с конденсатором), затем резкое падение тока до нуля – сверхпроводящее кольцо дает ответный мощный импульс тока, энергию которого снимает обмотка-В.
3D-принтеры на Луне без направляющих: засорятся лунной пылью. Вместо них 2-рычажный манипулятор с параллельными вертикальными осями шарниров.
Универсальная Строительная Машина УСМ: универсальное вездеходное шасси с которым соединяют: бульдозерный отвал, ковш погрузчика, бурильную установку, самосвальный кузов. Телеуправляемые бульдозер, грейдер, погрузчик везут грунт в кузове для сцепления колес с грунтом.
В шахте, пробуренной бурильной установкой заложим, подорвем взрывчатку: котлован подлунного города. Заводы-производители УСМ, строительной взрывчатки, ракетного топлива, лунного бетона, конструкционных материалов.
Для тесных марсианских, лунных пещер легко разбираемые на небольшие детали андроиды. Ползающие роботы по тесным проходам пещер протянут кабеля ретрансляторов, доставят в пещеры детали, соберут с них андроидов. Андроиды построят в пещерах лунные города
КОСМИЧЕСКИЙ ЛИФТ
Выводит на орбиту, сажает на Луну электромагнитный космический лифт – мощная фазированная антенная решетка ФАР на боку высокой лунной горы. ФАР на горе плоским фронтом несимметричных импульсов электромагнитной волны отталкивает от себя кольцевые проводники вокруг космического корабля.
Если импульсы резко нарастают и медленно спадают – ФАР отталкивает космический корабль. Если импульсы медленно нарастают и резко спадают – ФАР притягивает космический корабль.
В роли кольцевых проводников корпус корабля с высокой электропроводностью. Кольцевые проводники ориентированы своей плоскостью параллельно плоскому фронту от ФАР. ФАР непрерывно фокусирует импульсы на космическом корабле.
Лифт разгонит или тормозит корабли на орбите Луны, спустит с орбиты на Луну. На расстоянии 200м от Луны корабль включит ракетные двигатели мягкой посадки.
Лифт в ~10 раз снизит стоимость вывода кораблей на орбиту Луны, стоимость посадки корабля с орбиты Луны на Луну. Лифт может сфокусированными на спутник электромагнитными волнами бесконтактно заряжать аккумулятор спутника на орбите Луны
ОРБИТАЛЬНЫЕ СТАНЦИИ УСКОРЕНИЯ СПУТНИКОВ
Лунная промышленность будет создавать Орбитальные Станции Ускорения Спутников – ОСУС. ОСУС на экваториальной орбите Земли будет мощными несимметричными электромагнитными импульсами ускорять спутники, потерявшие высоту из-за сопротивления атмосферы. ОСУС будет толкающим лучом-1 толкать спутник-1 идущий спереди и притягивающим лучом-2 притягивать отстающий спутник-2.
Толкающий луч-1 имеет резко нарастающую, медленно спадающую амплитуду полупериода колебания. Притягивающий луч-2 имеет медленно нарастающую, резко спадающую амплитуду полупериода колебания.
Спутники имеют плоский диэлектрический диск с ускоряющей спутник антенной из закороченных бериллиевых или натриевых витков. В момент ускорения спутники следящим приводом направляют диск перпендикулярно к оптическому маяку ОСУС. В нерабочем состоянии диск параллелен встречному потоку атмосферы – снижение лобового сопротивления спутника
ОСУС позволят использовать тысячи телефонных спутников на сверхнизких орбитах без снижения их орбит в течение десятилетий. На орбите 3 ОСУС – они восстанавливают друг другу круговую форму орбиты. ОСУС в десятки раз сократят мировой рынок ракет-носителей на Земле
ОРБИТАЛЬНЫЙ ЛИФТ
На лунную орбиту людей, грузы везет лифт «надувная труба». Груз внутри трубы катится на 10 подрессоренных колесах: по 5 колес с каждого торца кабины лифта.
Варианты лифта:
1. Кабина лифта имеет зазор с трубой лифта для движения воздуха вниз. Груз двигает сила Архимеда
2. две надувные трубы рядом, с разным (попеременно) направлением движения воздуха. Груз двигает разница давлений между трубами.
Ежегодно автокатастрофы убивают 1,3млн.чел + 50млн инвалидов. Инвалиды получат рабочие места в Лунной базе. В крупных залах Лунной базы инвалиды летают в индивидуальных маховичных (транзисторные муфты между маховиками и винтами) соосных минивертолетах. Раскрутка маховиков с розетки. Мощность окольцованного соосного винта, двигателя минивертолета на Луне в 24 раза меньше.
Экономика переведет орбитальный мусор с Земли на Луну. Производство, эксплуатация робота-мусорщика с Луны на орбите Земли в 20 раз дешевле. Мелкий мусор испарит лазер робота, унесут солнечные лучи
УПРАВЛЕНИЕ ПОГОДОЙ
Изготовленные на Луне, доставленные с неё на орбиту Земли Климатические орбитальные зеркала КОЗ, площадью сотни тысяч квадратных километров, осветят узким спектром ночью солнечные батареи (заменят электростанции) крыш домов в городах.
Орбитальные зеркала ОЗ делят на Климатические КОЗ, Освещающие ООЗ, Информационные ИОЗ. Освещающее Геостационарное орбитальное зеркало ребром к Солнцу когда между Землей и Солнцем, не мешая солнечным лучам дневной стороны Земли.
В ночной стороне орбитальное зеркало электромоторами (от солнечных батарей) нацелит ячейки на города оплатившие ночные солнечные лучи. Электромобили, дома, предприятия получат энергию сверху.
Орбитальное зеркало ОЗ это множество соединенных в одной плоскости 100-метровых квадратных ячеек. Каждая ячейка орбитального зеркала пропускает солнечные лучи последовательно через две взаимно перпендикулярные шторы-X-Y.
Жалюзи шторы-X наводят луч на город по координате-X. Жалюзи шторы-Y наводят луч на город по координате-Y. Длинные жалюзи шторы-X, шторы-Y взаимно перпендикулярны.
Метеорологические ОЗ охладят прикрепленные к ним участки поверхности Земли, отражая солнечные лучи обратно в Космос. Другие Метеорологические ОЗ нагреют прикрепленные к ним участки поверхности Земли сконцентрировав на них лучи Солнца.
Управление погодой через закрытие орбитальными зеркалами от Солнца центра антициклона, через нагрев центра циклона орбитальными зеркалами.
Подавление смерчей, тайфунов управляя температурой и воздушными потоками орбитальными зеркалами. С помощью орбитальных зеркал одновременно управляя жалюзи шторами-X-Y, водя сфокусированную горячую точку с оптимальной скоростью вокруг нулевой антициклонной точки или объекта на земле можно закрутить в заказанном направлении вращения антициклон, двинуть его к заказанному городу или точно рассчитанными встречными потоками воздуха с нескольких сторон подавить смерч, ураган.
Метеорологические ОЗ можно использовать в качестве оружия против стран, для поджога нефтехранилищ, складов боеприпасов противника, для противовоздушной обороны, создавая вокруг охраняемого объекта мощный антициклон, сбивающий бомбардировщики, беспилотники, крылатые ракеты противника.
Информационные ОЗ отражая лазерные лучи, радиоволны, без аппаратной задержки дают телеканалы, интернет вместо спутников. На Земле, на ячейках информационного орбитального зеркала миллионы лазерных прицелов приводами непрерывно взаимно друг на друга прицеливают (по длине волны, номеру излучающего лазера) миллионы пар лазеров двухсторонних линий связи для индивидуальных пользователей.
При плотной облачности радиолинии с двухосевой угловой отрицательной обратной связью узконаправленных антенн. Лишние лепестки излучения пар антенн активно-противофазно компенсирует двухсторонняя обратная связь по их сигналам. Или узконаправленную радиолинию симулируют биения 2-х лазерных лучей, пробивающих облака разностной частотой.
Ячейки орбитального зеркала андроиды, управляемые с Земли людьми, соединят в ОЗ. Ячейку орбитального зеркала андроид-сварщики, андроид-укладчики углеволокна, андроид-сборщики изготовят, соединят в ОЗ на высоте ~3500км
ЗАДЕРЖКА УПРАВЛЕНИЯ АНДРОИДОМ равна времени задержки управления приводами костюма телеприсутствия при передаче человеком сигнала андроиду + время передачи сигнала по линии связи к андроиду + время отработки сигнала человека приводами андроида + время передачи сигнала о выполненном движении по линии связи от андроида к человеку + время отработки приводами костюма телеприсутствия сигнала от андроида.
Задержка управления андроидом равна удвоенному времени передачи сигнала в одну сторону + удвоенное время работы приводов костюма телеприсутствия + время отработки сигнала приводами андроида.
На расстоянии 6000км от человека в костюме телеприсутствия на Земле до андроида время двукратного прохода лазерного сигнала (радиосигнала) обратной связи 0,04сек + две задержки приводов костюма телеприсутствия по 0,02сек + задержка управления приводами андроида 0,02сек. Итого задержка управления андроидом 0,1сек. Задержка 0,1сек устроит человека: реакция мозга человека ~0,1сек.
Цифровые линии связи оптимизировали на упрощение аппаратной коммутации и максимум суммарной скорости каналов: расшифровывают последовательно + потеря битов на кодирование, на разделение и адресацию каналов, на декодирование и повторную адресацию каналов. От этого задержка управления 20 раз больше аналоговой обратной связи с отдельной частотой в каждом канале.
Будущее за цифровой криптостойкой линией связи «костюм телеприсутствия – андроид» с десятками одночастотных лазерных лучей. Её протокол проще существующих.
На Земле и орбите угловая обратная связь прицеливает оба лазера линии связи «костюм телеприсутствия – андроид» друг на друга. Прицеливание, длинные матово-черные изнутри трубы перед фотоэлементами не дают вмешаться зарубежным спецслужбам в линию связи.
Часть команд приемник синтезирует биениями других команд с подобранными алгоритмом функциями. Частоту биений меняет коммутация двух колебательных контуров передатчика.
Ячейку орбитального зеркала лунные буксиры (изготовлены заправлены на Луне) поднимут в геостационарную орбиту, манипуляторами соединят с орбитальным зеркалом.
Орбитальные зеркала покрыты легкоплавким сплавом с металлов типа индия чтоб протоны солнечных ветров не сделали поверхность зеркал матовыми. Раз в 3-4 года зеркала поворачивают к Солнцу задней матово-черной стороной для нагрева до 400°C – поверхность зеркал выровняет поверхностное натяжение расплавленного легкоплавкого сплава.
В Лунной базе лифт невесомости с линейным электромагнитным приводом кабины. Кабина: ротор линейного электродвигателя с постоянными магнитами. Статор: электромагнитные обмотки вдоль шахты. В компьютере кабины лифта космонавт устанавливает график ускорения.
Шахту лифта создает идущая вертикально вниз соплом вниз ракета. Материал шахты выхлоп ракеты сдувает вверх высокоскоростным газовым потоком – выгодно в вакууме с малой силы тяжести и большим трением частиц.
Луна будущая база звездолетов: расходные материалы, ремонт. На Луне будут строить звездолеты, снаряжать их термоядерные двигатели топливом. Звездолеты в качестве энергоисточника и двигателя одновременно будут иметь электроядерный реактор. Термоядерная реакция в мишени сильноточного ускорителя.
С Луны уйдут к звездам звездолеты с андроидами-колонистами. Андроиды построят для людей города с полной инфраструктурой.
Космонавтика это конкуренция между Партией ученых и Партией капиталистов. Партии ученых нужны космические датчики. Партии капиталистов нужна промышленность Луны, Марса, других небесных тел для развития космического частного бизнеса.
Христианские страны призывают объявить 85% Солнечной системы космическим заповедником с запретом экономической деятельности чтоб санкциями задушить космический бизнес нехристианских стран
Форум: dzen.ru
ЛУННЫЙ КОРАБЛЬ: полёт на Луну: на Земле с нижней части погруженной в океан на экваторе трубы минометный старт лунной ракеты-носителя с гибридным ракетным двигатель. Экипаж 2 человек для управления строительными машинами на Луне.
Строительные машины, супермаховик, велогенераторы, инфраструктуру Промышленной лунной базы доставят заранее. После выхода с трубы ракета-носитель выводит Лунную Капсулу с космонавтом на орбиту.
На орбите Земли отделяется двигательный отсек Лунной Капсулы, остается Лунная Капсула с Теплозащитный Шитом. Подходит орбитальный буксир с ракетным двигателем, с электромагнитным ускорителем, разгоняющим выхлопные газы до больших скоростей. Орбитальный буксир на топливе с соединениями щелочных металлов.
Орбитальный буксир стыкуется к 3 беззазорным электрозамкам Лунной Капсулы с стороны противоположной Теплозащитному Щиту Лунной Капсулы и буксирует на лунную орбиту. Орбитальный буксир разгоняет Лунную Капсулу до половины расстояния к Луне. Разворот на 180°.
Половину-2 расстояния Орбитальный буксир тормозит Лунную Капсулу до 1-й космической скорости Луны на ее орбите. Полет к Луне, обратно космонавты летят в Лунной Капсуле с искусственной силой тяжести (разгон, торможение).
На орбите Луны Лунную Капсулу ждет Многоразовая Посадочная Ступень Лунного Корабля. Она тремя беззазорными электрозамками стыкуется к Лунной Капсуле. Многоразовая Посадочная Ступень Лунного Корабля + Лунная Капсула = Лунный Корабль. Орбитальный буксир отстыковывается.
Лунный Корабль с космонавтами спустится на Луну. Подъедет радиоуправляемый вездеход, 2 манипуляторами отстыкует Лунную Капсулу от 3 беззазорных электрозамка Многоразовой Посадочной Ступени Лунного Корабля, загрузит ее на 2 электрозамка грузовой платформы вездехода. Подключит разъемы, даст воздух, электричество, связь. Отвозит в Международную лунную базу.
Лунная Капсула стыкуется с терминалом, космонавты спустятся по лестнице в бункер. Корпус Лунной Капсулы проверят на утечку, отвезут с другими космонавтами радиоуправляемым с базы вездеходом к Многоразовой Посадочной Ступени Лунного Корабля, закрепят на ней 3 беззазорными электрозамками.
Вездеход подключим к разъемам Многоразовой Посадочной Ступени Лунного Корабля. Автоматическая проверка всех систем. Заполним топливом баки Многоразовой Посадочной Ступени Лунного Корабля. Включим двигатели, Многоразовую Посадочную Ступень Лунного Корабля поднимем на орбиту.
Отстыкуем Лунную Капсулу, пристыкуем её 3 беззазорными электрозамками к Орбитальному Буксиру. Многоразовую Посадочную Ступень Лунного Корабля после заправки (топливом) Лунным орбитальным буксиром оставим на орбите Луны для приема следующего корабля с Земли.
В варианте без Лунного орбитального буксира двигателем, гиродином Орбитального Буксира в стыковке управляет космонавт Лунной Капсулы по стереокамерам Орбитального Буксира, Лунной Капсулы. На внешней поверхности обоих аппаратов цветная маркировка шахматного типа с цифрами, знаками (гони к пятерке к острию стрелки) стыковки. Орбитальный Буксир доставит Лунную Капсулу на орбиту Земли.
Орбитальный Буксир полпути к орбите Земли разгоняется своим двигателем. Половину-2 пути тормозит до орбиты Земли. Весь путь с искусственной силой тяжести (разгон, торможение). Орбитальный Буксир отстыкуем от Лунной Капсулы. Лунная Капсула теперь Спускаемый Аппарат, который приземлится на парашюте.
Топливо Орбитального буксира: облученный нейтронами графит. Накопленная графитом от нейтронного облучения энергия 8,4 раза уменьшит расход топлива.
Грузы в Лунный орбитальный буксир доставят минометным стартом ракеты-носителя из наклонной шахты на Луне. В районе верхней точки броска включим гибридный ракетный двигатель, выводя груз на орбиту Лунный орбитальный буксир. Минометный старт уменьшит расход топлива, пыль от запуска ракеты.
Лунный лайнер использует вращение корпуса диаметром 17м для искусственной силы тяжести.
Космонавты используют бесшлюзовой лунный экзоскелет (расположен горизонтально) без лестницы в лунном модуле. Отсек экипажа расположен снизу в лунном модуле для отказа от лестницы.
4 двигателя спуска-взлета сверху лунного модуля. На спуске давление в камере сгорания, обороты единого турбонасоса двигателей выше, чем на подъеме. Сбоку снизу отсека экипажа 2 бака горючего, окислителя для подъема лунного модуля + 2 бака горючего, окислителя для спуска лунного модуля. Турбонасос двигателя сбоку снизу отсека экипажа. 4 бака, турбонасос частично внутри отсека экипажа, занимая от пола пространство в высоту не больше 60см.
Перед подъемом лунного модуля оба бака для спуска сбросят. Выхлоп двигателей направлен вбок под углом 30°. Отсек экипажа (с баками, турбонасосом) конической формы для свободного выхлопа двигателей. Вместо иллюминаторов панорамное изображение с 4 телекамер: мониторы в стенках отсека экипажа.
Органы управления по кругу на потолке. В центральной части потолка подвешены на шкивах, тросах с пружинами вытягиваемые вниз космонавтами ящики с грузами.
Лунный модуль прилунится на 4 управляемых колесах. Едет по Луне: нет трат времени на возврат в исходную точку. При подъеме лунного модуля сброс шасси
28) Перенаселение планеты единственный способ заставить человека колонизировать Галактику. Иначе христиане евгеникой Евангелия убьют человечество. Христианские идеологи в начале 20 века приняли решение закрыть человечеству путь в соседние звезды для защиты строительства, функционирования Мирового христианского правительства. (удалили) 1903г в России христиане закрыли журнал «Научное обозрение», конфисковав, уничтожив номер журнала с статьей изобретателя Константина Циолковского о космических кораблях, которую отвергли все журналы.
На статью Циолковского через 2 года христиане ответили лженаучной (ложное толкование формул, явлений) антизвездолетной Теорией относительности для борьбы с изобретателями звездолета.
Сегодня христиане больше всего боятся, что до изобретения звездолета осталось около полувека, большинство планет галактики колонизуют нехристианские страны. Поэтому торопятся сократить человечество до золотого миллиарда христиан.
Мировое правительство приведет к бесконечному сокращению человечества. Каждое новое поколение правителей в страхе не удержать личную власть, законами будет сильнее ограничивать предприимчивость, численность населения.
Аналогично стремление Китая к политической стабильности на 300 лет остановило прогресс, привело технологическому, военному отставанию Китая от Европы. Из-за отсутствия внешних военных и политических конкурентов в Китае 300 лет шли процессы саморазрушения страны. Мировое правительство постигнет участь Китая, если нет угроз от внешних военных, политических конкурентов
29) ДВИГАТЕЛЬ ЗВЕЗДОЛЕТА (статье 4 раза вредили)
Звездолет двигают между звездами несимметричные электромагнитные импульсы в узконаправленном луче антенны. Передняя антенна звездолета дает медленно нарастающую, резко спадающую амплитуду полупериода колебания. Задняя антенна звездолета дает резко нарастающую, медленно спадающую амплитуду полупериода колебания.
Передняя, задняя антенны звездолета излучают одну частоту с некоторым сдвигом по фазе, измеряемым по пикам излучаемой энергии.
Я изобрел способ получения сверхкрутого (абсолютный мировой рекорд) заднего фронта импульса и сверхкрутого (абсолютный мировой рекорд) переднего фронта импульса в сверхузконаправленном (абсолютный мировой рекорд) луче. Патент на это изобретение передам Индийской организации космических исследований в обмен на помощь в получение вида на жительство в Индии.
Аналог движения – сильная отдача атома после излучения гамма-фотона в гамма-распаде.
Обмен электромагнитной энергией, импульсом между звездолетом и станцией разгона-торможения
ДВИГАТЕЛЬ ЗВЕЗДОЛЕТА НА ГАММА-ЛУЧАХ
Сильноточный ускоритель длиной 1м бьёт по вращающемуся для охлаждения, танталовому диску потоком электронов, создавая в танталовом диске поток гамма-лучей в направлении первоначального вектора движения электронов ускорителя.
Диск с порошкового сплава тантала с легким изотопом бериллия: используется сверхвысокая теплоемкость и теплопроводность бериллия для большего ресурса диска. Скорость электронов оптимизирована под максимальный ресурс диска. Электронный луч обегает поверхность диска по спирали от края к центру диска чтоб не расплавился.
Двигатель длиной 1м на гамма-лучах дает тягу 2сек, 9мин остывает. Тысячи дисковых двигатель на гамма-лучах в корме разгоняют звездолет до половины скорости света. Энергия с атомной электростанции
ДВИГАТЕЛЬ СВЕРХСВЕТОВОГО ЗВЕЗДОЛЕТА
(статье 6 раз вредили) двигатель сверхсветового звездолета – ускоритель плазмы до сверхсветовой скорости. Сегодня в ускорителях фронт электромагнитной волны идет параллельно вектору движения плазмы. Ускоряемая плазма не достигнет скорости света, как скорость колесного парусника с прямым парусом не превысит скорость попутного ветра.
Если ветер дует сбоку под углом в жесткий вертикальный парус-крыло – скорость колесного парусника почти вдвое превысит скорость ветра. В сверхсветовом ускорителе плазмы работает эффект ножниц.
Скорость перемещения точки пересечения (максимума напряженности электромагнитного поля в ускорителе) лезвий ножниц превышает скорость света. В сверхсветовом ускорителе плазмы эффект электромагнитных ножниц ускоряет плазму до 175% скорости света
Сверхсветовой ускоритель плазмы: в космосе вакуумная труба-1 в которой проводящие кольца в трубе ускорителя разгоняют сгустки плазмы до ~75-90% скорости света. На эти кольца подают высоковольтный ток с вакуумного разрядника или с наполненного инертным газом разрядника, включаемого рентгеновским импульсом.
Форма тока в проводящем кольце: резко нарастающая, медленно спадающая амплитуда полупериода колебания по амперам. Другими словами ток резко нарастает, медленно спадает. Такой ток создает электромагнитное поле сильно отталкивающее от себя любые проводящие среды, объекты.
После колец в вакуумной трубе-1 идут около сотни разрезных проводящих конусов, носами (вершинами) направленных к выходу ускорителя. У первого разрезного проводящего конуса угол его вершины ~87 градусов. На последующих разрезных проводящих конусах угол вершины постепенно увеличивается.
В каждом разрезном конусе между полуконусами два непроводящих угловых зазора-1-2. На четных (по счету) разрезных конусах зазоры-1-2 расположены в условно-горизонтальной плоскости, проходящей через ось ускорителя.
На нечетных разрезных конусах зазоры-1-2 расположены в условно-вертикально плоскости, проходящей через ось ускорителя. Другими словами угол между зазорами четных, нечетных разрезных конусов 90 градусов.
Проводящие полуконусы создают внутри себя цилиндрическое, точнее слегка коническое (конус поля направлен широкой частью к выходу ускорителя) поле, которое идет от поверхности полуконуса к оси ускорителя, создавая в оси ускорителя перемещающуюся точку максимума напряженности электромагнитного поля.
Проводящие четные полуконусы из-за зазоров-1-2 сжимают сгустки плазмы в условно-вертикальной плоскости, заставляя сгустки плазмы сплющиваться по горизонтали.
Проводящие нечетные полуконусы из-за зазоров-1-2 сжимают сгустки плазмы в условно-горизонтальной плоскости, заставляя сгустки плазмы сплющиваться по вертикали. Чередование горизонтального и вертикального сплющивания сгустков плазмы делает их компактными, уменьшая размеры ускорителя.
У проводящих полуконусов ускорителя радиус уменьшается в сторону движения плазмы. Углы раскрыва полуконусов выполнены по принципу: «осевая (вдоль продольной оси ускорителя) скорость пересечения электромагнитно-волновой поверхностью (от проводящих полуконусов) осевой линии на ~1-3% превышает (чтоб толкать сгустки плазмы) скорость движения сгустков плазмы вдоль оси ускорителя».
Другими словами скорость перемещения максимума напряженности электромагнитной волны вдоль оси ускорителя на ~2-4% превышает скорость сгустков плазмы, ускоряя их.
Сгустки плазмы ускоряются от градиента напряженности конического поля. Это коническое поле работает по принципу ножниц, что означает: точка максимума напряженности электромагнитного поля ускоряется с нарастающей сверхсветовой скоростью, отталкивая от себя сгустки плазмы к выходу ускорителя.
Линейка конденсаторных реле (как в детонационных реле атомных бомб) или однодорожечное линейное многоканальное (выходные импульсы по коаксиальным кабелям идут на все разрезные конусы) акустоэлектронное программное реле поочередно подключает через диод каждый разрезной конус к его силовому конденсатору с высокой добротностью. На каждый разрезной проводящий конус отдельный конденсатор, подпитываемый энергией с бортсети космического корабля.
Конденсаторы с бифилярной обмоткой: минимум индуктивности для максимальной крутизны переднего фронта электротока в проводящих полуконусах. Конденсатор соединен с проводящими полуконусами коаксиальным кабелем для максимума крутизны переднего фронта электротока проводящих полуконусов.
Система «конденсатор + кабель + проводящий полуконус» по коаксиальному принципу чтоб энергия не утекала бесполезно с системы через электромагнитные импульсы вне проводящего разрезного конуса.
Провода коаксиального кабеля подающего импульс электротока на проводящий полуконус, при разделении между собой покрыты слоем феррита, чтоб до точек соединения с полуконусом не было излучения электромагнитных волн наружу. Электроток (поток электронов) в проводящий разрезной конус идет от большого диаметра полуконусов, снимается с узкого горлышка конуса.
Когда сгусток плазмы в конусе, вдоль образующей конуса перемещается пик максимума электротока, электромагнитным полем толкая сзади сгусток плазмы. Точка максимума напряженности электромагнитного поля в ускорительном конусе двигается вдоль оси ускорителя с сверхсветовой скоростью, толкая сзади сгусток плазмы, уплотняя его. После ухода сгустка плазмы ток медленно уменьшается до нуля.
При уменьшении тока к конденсатору через противоположно направленный диод подключают последовательно дроссель (сердечник из редкоземельных металлов с гигантской магнитной индукцией) для аккумулирования на доли секунды энергии в магнитном поле, ее регенерации.
Оливер Хевисайд создал формулу мощности электромагнитного поля электрона движущегося с сверхсветовой скоростью. Формула применима к сверхсветовому протону – его заряд равен заряду электрона.
Ускоритель – оружие звездолета. Выхлоп ускорителя – средство двоичной цифровой (информация кодируется числом сгустков плазмы, расстоянием между ними) связи, работающее в вакууме с скоростью перемещения информации к пользователям на 75% больше скорости света.
Энергию звездолету даст электроядерный реактор. Технология сверхсветового ускорителя повысит КПД, уменьшит вес, размеры электроядерного реактора
ГАММА-ЛАЗЕР
Гамма-фотон 1,67МэВ и больше выбивает нейтрон с ядра изотопа бериллия 9Be.
Гамма-фотон 2,23МэВ и больше делит ядро дейтерия на 2 атома водорода. Для фотоядерных реакций с остальными элементами нужен гамма-фотон больше 6МэВ. Такие гамма-фотоны радиоактивные элементы не излучают, но дают ядерный взрыв, торможение электронов в сверхсильных магнитных полях или торможение электронов в сверхсильных постоянных магнитах.
Многоразовый орбитальный гамма-лазер на основе сильноточного ускорителя электронов (или мю-мезонов) врезающихся в постоянный магнит из самарий-кобальтового сплава. Гаммалазер в звездных войнах вышибет нейтроны с атомов вражеского звездолета, уничтожая ими его экипаж.
Известно сотни случаев: в пустом пространстве между звезд взрываются мощные точечные источники гамма-излучения с энергией как раз на мгновенное уничтожение всего живого в полусфере Земли с утроенного расстояния Луны. Это эскадры зеленых парней делят территорию галактики. Для разборки с ними за титул реальных кабанов Галактики готовим узконаправленные одноразовые гамма-лазеры с накачкой термоядерной бомбой нейтронной пушки.
Гаммалазер: узкую длинную сигару 20000т выводит с трюма галактического крейсера буксир. Асимметричности термоядерного взрыва достигаем сверхпроводниковой наружней обмоткой сигары. В термоядерном взрыве силовые линии магнитного поля не дают плазме разлетаться поперек силовых линий магнитного поля.
После испарения обмотки её электронное облако по инерции закручивается вокруг плазменного облака по расширяющейся спирали, сохраняя магнитное поле. Плазма закручивается в ту же сторону. Энергия взрыва идет преимущественно по оси сигары.
Есть случаи асимметричного термоядерного взрыва сверхновых звезд из-за магнитного поля. Чтоб энергию гамма-квантов не тратить на бесполезное ускорение электронов с стороны переднего луча на переднем конце сигары гаммалазера шаровой положительный электрод с легких химических элементов.
В заднем конце сигары такой же отрицательный электрод. В момент выстрела между обоими электродами разность потенциалов 3000000000V. 70% гамма-импульса луча гаммалазера идет с переднего конца сигары гаммалазера, 30% с заднего конца. Почти весь вес гаммалазера это термоядерная бомба накачки с нейтронной пушкой.
Для уничтожения планеты зеленых парней одновременно выстрелят 2 гаммалазера с 2-х противоположных сторон планеты. Все живое планеты зеленых сгорит за 30сек
Вариант-2: микробот: тонкостенный зеркальный конус (угол 45°, диаметр 3-10мм) самоориентируется давлением мощных лучей света. Кольцо микроботов, вращающихся 2 плоскостях полярной орбиты, вокруг звезды закроет её от планеты зеленых, превратит их в ледяные статуи замурованные в толщу твердого слоя замерзшей от космического холода атмосферы. Этим способом планеты (Венера, Земля) охладят от парникового эффекта
Вариант-3: ближе к звезде зеленых кольцо жаростойких микроботов – тонких круглых пластинок диаметром 1-10м: зеркальную с 2 сторон пластину её силовой гироскоп энергией солнечной батареи ориентирует зеркальной стороной на звезду не пропуская свет к планете
Вариант-4: нуклонные боеголовки для уничтожения планет противника. Протоны, нейтроны имеют сложную структуру, стабильную только при выполнении списка условий. Управляя условиями можно высвободить нуклонную энергию в тысячи раз превышающую энергию распада ядер урана-235
Технологическая основа звездолета, галактического крейсера: атомная подлодка: толщина прочного корпуса 10см (+10см приклеенного пенопласт-покрытия поглощающего ультразвук сонаров) совпадает с толщиной стенки пулеобразного (цилиндр с закругленными гранями) корпуса звездолета. Радиус центрифуги больше 16м: человек не замечает вращения: звездолет вращается как центрифуга для искусственной силы тяжести. Соответственно минимальный диаметр звездолета 32м + 2 толщины обшивки.
Источник энергии звездолета: электроядерный реактор на термоядерной реакции деления «водород + бор = гелий».
Электрокатапульта спускаемых с звездолета на планету аппаратов законом сохранения импульса экономит топливо.
Пропорции пулевидного корпуса звездолета от компромисса: масса (минимальная поверхность: шар) – лобовое сечение – масса разнесенной лобовой многослойной брони, рассчитанной на столкновение с встречной межзвездной пылью, движущейся с сверхсветовой скоростью. Движение с сверхсветовой скоростью: перед звездолетом в нескольких километрах 2 бронеэкрана от межзвездной пыли с собственным двигателем, системой лазерной стабилизации.
В новых звездных трассах перед звездолетом на расстоянии 3 световых часа летит навигационный щит обнаружения газа чтоб звездолет затормозил. Будут навигационные карты трасс звездолетов.
В звездолетах нет иллюминаторов. Рубка управления: кубическая комната на все 4 стены, потолок, пол проецируется полносферическая картинка с телекамер-телескопов с дополненной реальностью. Достаточно показать пальцем, сделать жест. Куда покажет палец определят 4 телекамеры в верхних углах рубки, покажут в экране как контрастное перекрестие с пустым центром.
Софт определит смысл жеста: зум; сообщить голосом; сообщить надписью на экране. Пилот вращает джойстиком сферическую картинку, переводя картинку с пола на стену. Аналогичная система в каютах экипажа. Телескопы-телекамеры с защитой от сверхмощных вспышек быстродействующими фильтрами
30)
РАКЕТЫ-НОСИТЕЛИ: (статье 12 раз вредили) гибридная ракета-носитель моей изобретательской фирмы GE2.0 вдвое дешевле, на 30% легче современной ракеты-носителя:
ВОДЯНАЯ РАКЕТА «ВОДА + ГРАФИТ»
90% объема ракеты-носителя занимает бак-1 с горячей водой. Под баком маленький бак-2 с жидким кислородом. Под ним камера-1 сгорания с горячим графитом. Ещё ниже камера-2 перегрева водяного пара.
В камере-1 сгорания раскаленная до 2800°C болванка графита лежит на 4 больших нижних и 4 малых верхних теплоизолирующих опорах, не касаясь стенки-1, покрытой изнутри зеркальным слоем из сплава золота и иридия (или родия), отражающего назад излучение.
Перед стартом воду в баке-1 греют до 300°С. Избыток давления перед стартом стравливает клапан ограничения давления. В момент старта клапан закрывают.
Перед стартом ракеты-носителя прямой ток через графит или микроволны греют до 2800°C болванку графита с поддержанием электроклапаном-1 давления инертного газа аргона в камере сгорания чтоб графит не испарялся.
Старт ракеты: пар с бака-1 крутит турбину турбонасоса жидкого кислорода и далее идет в камеру-2. Водяной пар охлаждает некоторые части ракеты. Кислород подается в камеру-1 сгорания, реагирует с графитом превращаясь в углекислый газ. Углекислый газ идет наверх (вода не должна попадать на графит) по трубе-У. Затем труба-У поворачивает вниз и идет в камеру-2 снизу ракеты-носителя.
В камере-2 вода нагреваясь от углекислого газа до высокой температуры, выходит с сопла камеры-2 вместе с углекислым газом. Сопло камеры-2 – это единственное сопло двигателя ракеты-носителя. Пар и углекислый газ поднимают ракету-носитель на орбиту.
Молекулярная масса воды равна молекулярной массе выхлопа водородного ракетного двигателя. Молекулярная масса воды самая малая в выхлопе существующих ракетных двигателях, что дает водяному ракетному двигателю моей ракеты-носителя на 20% больший удельный импульс в сравнении с неводородными ракетными двигателями.
Накопленная графитом, горячей водой перед стартом тепловая энергия на 30% уменьшает стартовую массу ракеты-носителя. При той же стартовой массе ракета-носитель поднимет груз больше современной ракеты.
Графит нагретый до 3400°C в атмосфере инертного газа аргона, хранит в себе теплоэнергию 12000ккал/кг. Теплота сгорания графита: 7500ккал/кг. Прочность графита при 2000°C втрое больше, при 3000°C вдвое больше.
Количество воды в гибридной ракете-носителе GE2.0, её температура оптимизированы на минимум цены вывода груза на орбиту
ВАРИАНТ-2: жидкий кислород не нужен. В камеру-1 клапан временно подает на горячий графит воду. В результате реакции графита с водой получается водород и угарный газ. Весь поток водорода и угарного газа выходит с камеры-1 через центростремительную турбину-1 вверх. Турбина-1 крутит водяной насос, закачивая воду под высоким давлением в камеру-1.
Вода прямо с бака охлаждая снаружи камеру-1, попадает в камеру-2. В камере-2 эта вода нагреваясь от смеси водорода и угарного газа, выходит из сопла ракеты-носителя вместе с водородом и угарным газом, создавая тягу для ракеты-носителя
ВОДЯНАЯ РАКЕТА «ВОДА + КАРБИД БОРА»
Конструкция ракеты-носителя аналогична ракете выше. Замена графита на карбид бора (горячепресованные вместе порошки графита, бора; карбид бора) дает стартовый вес ракеты на 37% меньше современной ракеты при равной грузоподъемности. Карбид бора накапливает теплоэнергии от нагрева больше графита. За счет малой молекулярной массы водяного выхлопа у двигателя моей ракеты-носителя больше удельный импульс
ВОДЯНАЯ РАКЕТА «ВОДА + ЖИДКИЙ АЗОТ»
В камеру сгорания водяной ракеты-носителя подается горячая вода и отдельно в теплоизолированную форкамеру с отверстиями жидкий азот. Получается много газа двигающего вверх ракету-носитель. Баллистическую ракету на воде и жидком азоте из-за её холодного выхлопа не смогут вовремя увидеть на старте инфракрасные датчики спутников противоракетной обороны «Золотой купол»
ВОДЯНАЯ РАКЕТА «ВОДА + НАТРИЕВАЯ СЕЛИТРА + ГРАФИТ»
Натриевый выхлоп электропроводен для электромагнитного ускорителя, что в разы повысит экономичность ракетного двигателя в режиме орбитального буксира.
Вектором тяги ракеты-носителя управляют 4 электромагнитные катушки магнитогидродинамического генератора (МГД-генератор) сопла двигателя, отталкивая (управляемый разрядниками или транзисторами ток резко растет, медленно падает) от себя горячие газы с натрием, охлаждая стенки сопла. Электричество МГД-генератора идет в бортовую сеть ракеты-носителя.
В зоне максимального сопротивления воздуха на высотах 7-15км в носовой части ракеты работает ракетный двигатель встречного равного (встречному потоку) импульса (в 20 раз уменьшит лобовое сопротивление ракеты) с обратной связью тяги с тензодатчиками (вибрационные колебания) силы на внутренней поверхности носового обтекателя ракеты. Обратная связь по тензодатчикам минимизирует сопротивление воздуха, экономя топливо.
Сопротивление воздуха 20 раз (4км вместо 81км) уменьшает дальность выстрела винтовочной пули 900м/сек. Ракета в разы быстрее: ракетный двигатель встречного равного импульса в 30 раз уменьшит максимальное лобовое сопротивление ракеты в атмосфере.
Сила лобового сопротивления ракеты без встречного ракетного двигателя = силе торможения гиперзвукового (5км/сек) встречного потока воздуха до нуля на расстоянии толщины (0,005мм) ударной волновой поверхности: по закону-2 Ньютона F=ma сила лобового сопротивления = секундной массе встречного потока воздуха длиной 5км умноженной на тормозное ускорение на расстоянии толщины ударной волновой поверхности 0,005мм.
Секундная масса воздуха = плотность воздуха умножить на секундный объем встречного потока воздуха длиной 5км. Столба воздуха диаметр равен диаметру ракеты. Секундный объем встречного потока воздуха = произведению числа Пи = 3,14 на секундную длину воздушного столба 5км, на квадрат половины диаметра столба воздуха. Секундный объем встречного потока воздуха = 3,14 умножить на 5000м и на диаметр ракеты.
Импульс встречной ракетной струи равен импульсу встречного потока воздуха, давление 2 раза больше, расход меньше. Встречная струя ракетного двигателя встречного равного импульса тонкая, длинная. Встречная струя ракетного двигателя плавно по радиусу загибает вбок встречный поток воздуха.
Сигнал датчика давления включает новые секции твердотопливных зарядов, подгоняя (по анализу звука софтом или по сигналу датчика тормозного ускорения) давление в сопле встречного ракетного двигателя к лобовому сопротивлению встречного потока воздуха.
Струя встречного ракетного двигателя ракеты в разы снизит температуру ракеты, уменьшая энергию торможения воздуха в столько раз, сколько раз снизилось сопротивление воздуха. Меньше энергия торможения воздуха – меньше тепловыделение и ионизация воздуха.
Стабилизация ракеты: отклонится от вектора торможения продольная ось ракеты – торможение встречного потока об высунувшийся бок ракеты вернет её в правильное положение.
Раствор лития в аммиаке компонент 3-компонентного жидкостно-ракетного двигателя, который отправит на свалку эволюции жидкий водород. При комнатной температуре раствор (жидкий) щелочных металлов в аммиаке (хороший проводник, теплоноситель) очень медленно испаряется с топливного бака.
Вектором тяги ракеты-носителя управляют 4 электромагнитные катушки магнитогидродинамического генератора (МГД-генератор) сопла двигателя, отталкивая (управляемый транзисторами ток резко растет, медленно падает) от себя горячие газы с литием, охлаждая стенки сопла, управляя вектором тяги двигателя.
Электричество МГД-генератора идет в бортсеть ракеты-носителя. Выхлоп электропроводный для электромагнитного ускорителя. Это десятки раз уменьшит расход топлива ракетой. В качестве источника электропроводного выхлопа для электромагнитного ускорителя можно использовать энергоемкое горючее: раствор алюминия или магния в изопропиловом спирте. Получение раствора: порошок алюминия или магния варят в спирте.
Ракеты, самолеты: флегматизатор смешивают с компонентами топлива: защита от взрыва, пожара. В полете ракеты (самолета) перед употреблением топлива от него возгонкой отделят флегматизатор: горючее-флегматизатор F, окислитель-флегматизатор N: при смешивании горючего, окислителя они не горят. Горючее, окислитель не горят из-за F и N. Перед включением двигателя отделяем F, N – топливная пара, сжигаем отдельным двигателем
ПРОВОДА ВМЕСТО ТРУБ
В ракетных двигателях расходом, пропорцией компонентов управляют трубки соединяющие разные части двигателей через мембраны. Мембраны двигают клапана, датчики силы.
Волны давления идут в трубках долго, сдвигая фазы системы управления двигателем, вызывая акустические резонансы двигателя. Выбросить трубки, мембраны. Сигналы быстрых датчиков абсолютного давления двигателя коаксиальным кабелем идут (290000км/с) в компьютер.
Обратная связь с датчиками абсолютного давления: софт таблицами решений «давление – время» находит время прихода волн давления, гасит сгенерированным противофазным колебанием. На каждую частоту свой сдвиг фазы по таблицам решений.
Софт поочередно давая напряжение на пьезокристалические кольца внутри трубчатых полостей двигателя противофазными колебаниями гасит акустические волны давления, регулируя амплитуду сгенерированных противофазных колебаний. Противофазные колебания создают и резонансные полости с быстродействующими клапанами.
Быстрый датчик абсолютного давления: разрядник типа автомобильной свечи. По величине пробивного напряжения компьютер найдет абсолютное давление таблицей решений «вольт – давление». Или высоковольтный игловой (коронный разряд) амперметр + таблица решений «ампер – давление»
ЦЕНА ЗАПУСКА РАКЕТЫ: стоимость горючего ракеты-носителя < 1% от стоимости запуска, баки 1-3%, двигатели 10-20%, остальное – цена обслуживания стартового комплекса. Самое опасное, самое дорогое обслуживание у водородной техники. Водородные баки 16 раз дороже керосиновых. Водородная ракета-носитель в 5 раз дороже керосиновой ракеты
ЭЛЕКТРОМАГНИТНОЕ ПЕРЕМЕЩЕНИЕ КОСМИЧЕСКОГО КОРАБЛЯ
Космический корабль двигает Фазированная Антенная Решетка ФАР состоящая из мощных катушек с обмоткой. ФАР на орбите Земли. При резком росте, медленном спаде тока (режим-О) катушек в проводящей оболочке или кольце космического корабля наводится ток индукции отталкивающий космический корабль от всегда сфокусированного на нем электромагнитного поля катушек ФАР. При медленном росте, резком спаде тока (режим-Р) катушек токи индукции проводящего корпуса космического корабля притягивают его к ФАР. Для заброски космического корабля на Луну ФАР на орбите Земле толкает корабль к Луне несимметричными электромагнитными импульсами
Вариант-2: ФАР на орбите Земле толкает космический корабль к Луне, ФАР на полюсе Луны притягивает космический корабль к Луне. С Луны на Землю: ФАР на орбите Земле электромагнитными импульсами притягивает космический корабль к Земле, ФАР на полюсе Луны отталкивает космический корабль от Луны. Космические корабли без затраты топлива и энергии ходят между Землей и Луной быстрее, чем на обычных ракетных двигателях.
Я изобрел технологию сверхузкого луча с сверхмощными (мощнее любого радара) несимметричными электромагнитными импульсами, которая позволит доставлять космические корабли на Луну или обратно в течение суток с искусственной гравитацией (полпути корабль разгоняется, полпути тормозит). Этот способ позволяет добираться до ближайщей звезды без затраты топлива и энергии, при условии что на обоих концах маршрута стоят аналоги ФАР с моей технологией
ПРОБЛЕМА МЕЖЗВЕЗДНЫХ ПУТЕШЕСТВИЙ С ОКОЛОСВЕТОВОЙ СКОРОСТЬЮ РЕШЕНА
Для звездолетов достаточно поставить отталкивающую узконаправленную антенну сзади и притягивающую антенну спереди звездолета. Обе антенны работают несинхронно. Другие антенны не нужны. Проблема межзвездных путешествий с околосветовой скоростью решена, если добавить в звездолет мою технологию сверхузкого луча с сверхмощными несимметричными электромагнитными импульсами
ДИЗЕЛЬНАЯ ТЕХНОЛОГИЯ ВЫВОДА ГРУЗА НА ОРБИТУ ЗЕМЛИ
груз кидаем на орбиту Земли длинной трубой 500м закрытой пластиковой мембраной в верхнем конце. Труба частично утопленная в морскую воду уменьшает толщину стенок инерцией воды. В трубе смесь водорода, фтора или водород + кислород + озон.
Снизу в трубу выстрелим сверхзвуковой скоростью прямоточный снаряд. Камера прямоточного сгорания вокруг средней части прямоточного снаряда. Нос снаряда сжимает смесь газов. Воспламенение сжатием как в дизеле. Горение в камере сгорания снаряда. Выхлоп назад периферическим соплом снаряда.
Условие-А: скорость снаряда больше скорости горения смеси газов. Для этого увеличиваем расстояние между молекулами, установив низкое давление в трубе. Снаряд пробив мембрану трубы летит с грузом на орбиту.
Вариант-2: труба + несколько мембран с разными смесями для условия-А. Носовой встречный твердотопливный ракетный двигатель стабилизирует положение снаряда, не дает снаряду сгореть в атмосфере от F=ma. Встречная ракетная струя с носа снаряда охлаждает снаряд до температуры его струи 1500°С (без струи 6000°С)
В межконтинентальной ракете при прорыве систем противоракетной обороны половина боеголовок будет лететь по конической левой спирали с переменным шагом, другая половина боеголовок по конической правой спирали с переменным шагом. Это в ~40 раз уменьшает вероятность перехвата боеголовки неядерными средствами
31) КОСМИЧЕСКИЕ МАНИПУЛЯТОРЫ: (статье 2 раза вредили) по энергии экономнее повернуть не многотонный космический корабль (спутник), а солнечную батарею на конце длинного (тень от корабля) манипулятора. С учетом лобового сопротивления атмосферы на орбите.
Стыковка космических кораблей 2-мя манипуляторами. Космические корабли имеют вокруг стыковочного кольца 2 скобы-ручки для манипуляторов. Стыковочная поверхность легкого космического корабля: кольцо с плоской поверхностью.
Стыковочная поверхность тяжелого космического корабля дополнена конусом вокруг кольца с плоской поверхностью.
На середине плоской поверхности кольца тяжелого корабля паз с приклеенным кольцевым герметизирующим надувным шлангом. В нерабочем состоянии паз с герметизирующим шлангом закрыт кольцевой крышкой. Которую отсоединяет манипулятор, закрепляет зажимом на внешнем корпусе корабля.
После сближения космических кораблей 2 манипулятора тяжелого корабля хватают за ручки легкий корабль, стыкуют. 2 манипулятора с маховично-тросовым приводом выполнят функцию ориентации, перемещения, амортизации стыковки. Тяжелого корабля 4 пустотелых болта с крупной упорной конической резьбой ввинчиваются в 4 стыковочные гайки с резьбой вокруг стыковочного кольца легкого корабля.
Стыковочные гайки позади стыковочного кольца чтоб 20см цилиндрической опоры сзади кольца выровняли деформацию на всей стыковочной поверхности кольца. Аналогично стыковочные болты сзади в 20см от стыковочного кольца тяжелого корабля. 2 болта достаточно для стыковки. 2 других комплекта «болт-гайка» дублируют. На каждом болте тензометрический датчик силы. При уменьшении силы ниже данной цифры сработает сигнализация.
Вариант-2: болты, гайки внутри стыковочных колец кораблей: ремонт механизма стыковки космонавтами без скафандра. В пазу стыковочного кольца тяжелого корабля кольцевой надувной герметизирующий шланг. Подача воздуха в шланг герметизирует стыковочные кольца. В нерабочем состоянии надувной шланг закрыт кольцевой крышкой, которая отсоединяется манипулятором, закрепляется зажимом на внешнем корпусе корабля (может быть отстрелена)
СТЫКОВКА С ОТСЕКОМ ИСКУССТВЕННОЙ ГРАВИТАЦИИ: для здоровья космонавтов главное искусственная сила тяжести, создаваемая гиродином раскрутки космического корабля (длинный цилиндр). Если радиус вращения больше 16м космонавты через неделю не будут чувствовать вращения: (в центрифугах от 16м космонавты не чувствуют). Стыковочный блок в торцевом центре корабля-цилиндра.
Для стыковки невращающегося малого космического корабля с большим вращающимся кораблем малый корабль стыкуется с невращающимся (крутится в противоположную сторону) стыковочным блоком большого корабля. Стыковочный блок цепляет только 3 штыря стыковочной части малого корабля без герметизации. Стыковочный блок электромотором раскручивает малый корабль до оборотов большого корабля, герметично стыкует их
НЕПОДВИЖНАЯ КАРТИНКА: чтоб телекамеры на большом корабле показывали неподвижную картинку неба с неподвижными звездами в любом направлении, по окружности 6-8 телекамер. В каждом направлении угла зрения телекамер перекидываем кадр с одной телекамеры на другую с перестановкой строк кадра соответственно угловой скорости корабля-цилиндра. В телекамерах вертикальная кадровая развертка возможна за счет вращения телекамеры вместе с кораблем-цилиндром.
ВАРИАНТ-2: телекамеры в невращающемся стыковочном блоке.
Поиск точек утечки воздуха с космического корабля: высокочувствительный 3D-микрофон, которым космонавт водит по внутренней поверхности корабля.
Можно поджарить электронику вражеских спутников на орбите биениями (микроволны) 2-х лучей инфракрасных лазеров. 90% энергии двух инфракрасных лучей превратится в микроволны проходящие сквозь корпус космического корабля, спутника
32)
СНАРЯДНАЯ НАВИГАЦИОННАЯ СИСТЕМА: (статье 6 раз вредили) Большая война: за 3 месяца уничтожат навигационные спутники. Дальше работает пушечная навигационная система: расположенная почти полностью в воде (охлаждение, демпфирование колебаний, инерционная разгрузка ствола, маскировка) межконтинентальная пушка. Снаружи только конец ствола с пленочной заглушкой. Пленка-заглушка в конце ствола держит вакуум внутри ствола перед выстрелом.
Конец ствола уходит в воду при налетах ударных беспилотников. Вакуум получат соединяя полость стволов с вакуумным баком. Пушка выстрелит навигационный снаряд. В наивысшей точке траектории пиропатрон делит снаряд на 2 половинки-1-2 снаряда с достаточно высокой скоростью разделения. Акселерометр включит таймер снаряда.
В половинке-1 снаряда в заданное (секретное для противника) точное время-1 сработает взрывомагнитный генератор-1, выдав 2 одновременных импульса с разным направлением вращения осей (оси направлены вправо и влево) поляризации. Импульс фиксируют приемники навигаторов.
Через доли секунды в заданное точное время-2 сработает взрывомагнитный генератор-2 половинки-2 снаряда, выдав 2 одновременных импульса с разным направлением вращения осей (оси направлены вправо и влево) поляризации.
По времени импульсов с точно известных точек подрыва снарядов навигаторы наземных роботов вычислят свои координаты.
Время, последовательность импульсов по шифрованным переговорам. В ночное время в навигационном снаряде вместо взрывомагнитных генераторов мощные световые вспышки. Зеркальную координату уберет селекция по направлению вращения оси поляризации радиоимпульса снаряда. Для этого у снаряда 2 антенны с противоположным направлением вращения осей поляризации. Обе оси поляризации под углом 45° к оси снаряда.
Отражения от импульсов ловят радары, выявляя расположение объектов противника. Энергоисточник навигационного снаряда: пиротехнический импульсный МГД-генератор.
Военные роботы в промежутках времени между парами сигналов точного времени используют инерциальный навигатор, навигацию по рельефу местности. Отклонение от расчетной траектории в плотных слоях атмосферы инерциальный навигатор снаряда вносит в код сигнала точного времени. При движении в атмосфере инерциальный навигатор снаряда гиродином корректирует отклонения от расчетной траектории аэродинамическим способом, меняя угол атаки снаряда
Вариант-2: корабль или самоходка выстреливает с одной пушки 2 снаряда с точной паузой между ними.
Вариант-3: пушка выстреливает снаряд. В точке-А снаряд дает зашифрованный (динамический шифр меняется по времени, другим признакам) импульс-1, затем в точке-В снаряд дает зашифрованный импульс-2. Импульсы передают заранее вычисленные координаты снаряда в момент излучения импульса. Точки-А-В, время старта снаряда, время импульсов, траектория снаряда известны: триангуляция дает 2 координаты военным внизу. Зеркальную координату отсекают по предыдущей. Зашифрованный импульс снаряда может быть:
1. радиоимпульсом
2. инфракрасным импульсом
3. нейтронным импульсом
4. рентгеновским импульсом в окне прозрачности (дейтериевый, танталовый лазеры) атмосферы для рентгена.
При запуске снаряда в более плотной атмосфере:
1. гиродин увеличивает угол атаки снаряда чтоб поднять высоту до стандартных точек импульсов.
2. система коррекции управляет конденсаторной или акустоэлектронной линией задержки навигационных импульсов.
Для защиты от подделки сигналов спутник с дублирующей сверхузконаправленной лазерной связью. Навигатор антенной ловит радиоволну синтезированную биениями лучей двух инфракрасных лазеров спутника
33)
ГРАВИТАЦИОННЫЙ ЛОКАТОР-НАВИГАТОР (статье 5 раз вредили)
Влияние Солнца на силу тяжести 2,17 раза меньше, чем Луны. Предлагаю гравитационную навигационную систему работающую на изменении силы гравитации от Луны. Основа гравитационного локатор-навигатора: кварцевые часы.
Берём диагональную половинку пустотелого бериллиевого куба. Для получения гравилокатора располагаем в 3 сходящихся под прямым углом гранях пустотелого бериллиевого куба с обоих сторон каждой грани пару кварцевых пластин. Каждая из 3 граней бериллиевого куба это бериллиевый электрод кварцевых часов.
На бериллиевом электроде с обоих сторон крупные (для чувствительности к гравитации) охлаждаемые (для увеличения скорости и частоты звука в кристаллической решётке) кварцевые пластины.
С нижней стороны бериллиевого электрода кварцевая пластина-1. С верхней стороны бериллиевого электрода кварцевая пластина-2. Бериллиевая стенка разделяющая оба кварца, имеет толщину при которой волны от кварцев в противофазе гасят друг друга. С другой стороны кварцевой пластины-1 электрод-2А.
Массу электрода-2А подбираем под резонансную частоту кварца в условиях эксплуатации. С другой стороны кварцевой пластины-2 электрод-2В. Массу электрода-2В подбираем под резонансную частоту кварца в условиях эксплуатации. Резонансную частоту обработкой кварцевых пластинок-1-2 делаем равной при расположении кварцевых пластинок-1-2 вдоль оси вектора гравитации.
Собранные на бериллиевом электроде две кварцевые пластинки с электродами-2А-2В представляют собой 2 кварцевых часов, работающих синхронно при вертикальном расположении плоскости кварцевых пластин-1-2. Расположим плоскость кварцевых пластин-1-2 перпендикулярно вектору силы гравитации.
В верхней кварцевой пластине-2 гравитацией сжата кристаллическая решётка. Расстояние между атомами уменьшилось. Скорость звука в кварце от этого выросла. Это вызывает увеличение частоты колебаний кварцевой пластины-2 в режиме часов.
В нижней кварцевой пластине-1 гравитацией растянута кристаллическая решётка. Расстояние между атомами увеличилось. Скорость звука в кварце от этого уменьшилась. Это вызывает уменьшение частоты колебаний кварцевой пластины-1 в режиме часов. Суммируя колебательный сигнал кварцевых пластин-1-2 получаем биения. Частота биений: сигнал величины силы гравитации. Это гравиметр.
Для получения гравилокатора располагаем в трёх сходящихся под прямым углом гранях пустотелого бериллиевого куба с обоих сторон граней 3 пары кварцевых пластин. Бериллиевый куб – общий электрод 3 кварцевых часов.
При работе гравилокатора с его 3 кварцевых часов получаем 3 частоты биений. По 3 частотам биений гравилокатор определит направление вектора силы гравитации. По проекции вектора силы гравитации на горизонтальную поверхность определяется направление на тяжёлый объект (подлодка, корабль, небесное тело, галактический крейсер)
ВАРИАНТ-2: вместо куба уголковый отражатель в трех гранях которого сверху кварцевые пластины.
В софте гравитационного локатора-навигатора таблица решений «траектория Луны – сила гравитации от влияния Луны – координата». Сила гравитации Луны уменьшит показания времени кварцевых часов тем больше, чем меньше угол между направлением на Луну и направлением перемещения колеблющейся массы кварцевой пластины. По 3 частотам биений софт гравилокатора-навигатора определит вектор силы гравитации, координаты гравинавигатора, направление на Луну.
Гравитационный локатор-навигатор определит направление на Луну находясь в батискафе под водой на любой глубине. Масса океанской воды поднятая на 7,5м притяжением Луны, своим притяжением увеличит чувствительность гравилокатора-навигатора как гравитационная линза, если Луна с той же стороны планеты. Зеркальные координаты отсекаем 3 углами направления на Луну, информацией об удалении, приближении Луны.
Гравинавигатор находит координаты даже в движении при отсутствии начальных координат.
У гантельного (6 взаимно перпендикулярных пар гантелей на крутильных весах) гравинавигатора (вес 20кг) ядерной ракеты «Трайдент» атомных подводных ракетоносцев США навигационная точность 500м (независимо от дальности полета) при отклонении конца вектора гравитации 10 в минус 5-й, 10 в минус 6-й степени длины вектора. По проекции этого вектора на горизонтальную плоскость софт дает сигнал коррекции движения боеголовок.
По предыдущему гравитационному рельефу местности, по величине сигнала гравиметра, по отклонению его 2D-вектора, по высоте полёта от инерциальной навигационной системы борткомпьютер баллистической ракеты с точностью 500м находит свои координаты.
В ядерных ракетах сегодня гравитационная навигационная система из 2-х взаимно перпендикулярно соединенных одним концом интерферометров Майкельсона: точность 90м независимо от дальности полета.
Астронавигатор ракеты «Трайдент»: точность 900м в навигации по 2 звездам. У вращающегося в электростатическом подвесе шара-гироскопа атомной подводной лодки «Огайо» навигационная точность 900м после кругосветного плавания без коррекции.
По расчетам максимум силы гравитации Земли на глубине 1400км.
Будущие службы поисковиков: магнитокарта, шумовая карта, радиационная карта, подводная карта; карта распределения финансов по странам, городам, работодателям
ИНЕРЦИАЛЬНЫЙ НАВИГАТОР: для накопления данных гравилокатору-навигатору нужны данные инерциального навигатора. 6 кварцевых пластинок гравилокатора-навигатора дают функцию инерциального навигатора, определят 3 угловых, 3 линейных ускорения. По этим 6 цифрам с знаками плюс и минус, по таблицам решений «разность частот противолежащих параллельных кварцевых пластин – ускорение (угловое, линейное)» софт в инерциальном режиме вычислит координаты
ЛОКАТОР ГРАВИВОЛН: (статье вредили) на вершинах воображаемой правильной треугольной пирамиды из 4 равносторонних треугольников, устанавливаются гравилокаторы взаимно одинаково ориентированные (по навигационным звездам) силовыми гироскопами. Гравитационная волна образуется, когда центры масс обоих звезд в двойной звезде устанавливаются на одной линии с ее направлением на гравитационный локатор гравитационных волн.
Для повышения разрешающей способности локатора гравитационных волн мои совмещенные гравилокаторы на вершинах воображаемой треугольной пирамиды располагаются на максимальном расстоянии друг от друга. Желательно на краях Солнечной системы. Вершины (это спутники с совмещенным гравилокатором) воображаемой треугольной пирамиды могут располагаться на разном расстоянии от друг друга.
Форма этой пирамиды заложена в формулы – изменения в времени формы этой воображаемой пирамиды не отражаются на точности работы локатора гравитационных волн.
Когда от двойной звезды приходит гравитационная волна вначале увеличится частота кварцевого резонатора гравилокатора на ближайших к двойной звезде совмещенных гравилокаторах. Затем на других гравилокаторах.
По разнице времени кварцевых резонаторов разных гравилокаторов определим скорость, направление на источник гравитационной волны. Локатор гравитационных волн построит карту гравитационных волн, градиентов Вселенной.
Если в ядерных реакциях металл франций превратится в металл осмий, гравитационная сила вещества вырастет за счет изменения взаиморасположения нейтронов, протонов. Плотность металла франция 9,4 раза меньше металла осмия. Атомная масса франция на 10% больше осмия. При обратной ядерной реакции гравитационная сила уменьшится. Больше плотность компоновки ядра атома – большей силой гравитации обладает вещество из химического элемента.
В 1-й левой четверти таблицы Менделеева элементы пониженной плотностью упаковки нейтронов, протонов в ядрах атомов. Меняя плотность упаковки нейтронов, протонов ядер атомов меняем силу гравитации. Менять плотность у ядер атомов химсоединений в сильном постоянном электрическом, магнитном полях
34)
НЕЙТРОННЫЕ ПУШКА, ЛОКАТОР, ЛИНИЯ СВЯЗИ: нейтронный цифровой модулятор для связи с андроидами-солдатами, выкуривающим противника с глубоких бетонных бункеров. Нейтронный модулятор на робот-автомобиле, робот-вертолете = цифровая связь через бетонную крышу бункера толщиной 100м.
Датчик нейтронного излучения андроида в бункере по колебаниям фона нейтронного излучения дешифрует цифровые сообщения. Для нейтронной модуляции достаточны атомные, молекулярные эффекты или вращающиеся многодисковые модуляторы.
В 1970-х нейтронные пушки (Россия, США, Индия) импульсом нейтронов (сбоку от стержня) мгновенно увеличивали в объеме кристаллическую решетку стального стержня: он прыгал вверх на 2м.
Плутониевые нейтронные пушки сотни раз легче, проще цезиевых пушек. Нейтроны не требуют нейтрализации электронами заряда ионов цезия в пучке, чтоб положительно заряженные ионы цезия взаимно не отталкивались. Расходимость цезиевого пучка меньше чем у других химэлементов.
Высоконаправленные плутониевые нейтронные пушки лучшее оружие против межконтинентальных баллистических ракет. Орбитальная плутониевая нейтронная пушка с прицельной системой на гиродине, датчиками координатной базы от спутников весит 100кг на орбите.
Орбитальная цезиевая пушка 30т с технологией стелс, с бериллиевым ударным униполярным генератором-маховиком с газотурбинным приводом, баками с цезием, с гептилом, с азотным тетраоксидом.
На орбиту орбитальная нейтронная пушка как снаряд доставляется пушкой с подводной лодки. Орбитальная нейтронная пушка нейтронами с скоростью 20000км/с сбивает не одну, а одновременно несколько десятков взаимно близколетящих боеголовок баллистических ракет, если они не покрыты экраном из сплава редкоземельных металлов гадолиния 157Gd, эрбия 167Er.
Сплав сильно греется от нейтронов. Под экраном из сплава теплоизолятор из радиационно сшитого полиэтилена.
Нейтронная пушка одноразовая, цезиевая многоразовая. После старта ядерных ракет спутники-истребители откроют пушечный огонь по цезиевым пушкам трассирующими снарядами подсветки невидимого матово-черного холодного стелс-объекта.
Взрыв чернобыльского реактора: поток нейтронов, водяной пар выбросили в атмосферу 75т 5%-ного урана и многотонную крышу реакторного зала не тронув стены реакторного зала. Нейтроны двигались с скоростью 20000км/с только вниз, вверх вдоль урановых стержней с обогащенным ураном.
Аналогично 2 узкими противонаправленными потоками двигаются нейтроны вдоль плутониевого стержня плутониевой нейтронной пушки. Орбитальный нейтронный локатор делает нейтронную карту местности вместе с беспилотниками с датчиками ответного излучения.
Нейтронный импульс как луч наводится с орбиты на группу беспилотников. Точные часы беспилотников синхронизируются по импульсу орбитального нейтронного локатора
35)
ЗВЕЗДНЫЕ ВОЙНЫ: орбитальные ударные униполярные генераторы лазеров: бериллиевые роторы. Бериллий чемпион электропроводности в единицу веса среди химически устойчивых металлов. Электропроводность на единицу веса бериллия на 23%, натрия на 75% лучше алюминия.
Бериллиевый ударный униполярный генератор.
Бериллиевые, алмазные или пирографитные рентгеновские волокна с покрытием из сплава иридия с золотом проводят рентгеновские лучи только до их испарения. Волокнам нужна жаропрочность, высокая теплоемкость чтоб дольше не испаряться.
Рентгеновский лазер – плутониевая бомба накачки окруженная сферой диаметром 1м, в которую впаяны торцы бериллиевых, алмазных или пирографитных волокон. Другие торцы волокон сведены к 5 прицельным дискам, припаяны к ним.
Каждый прицельный диск имеет 2D-привод наводки на цель (термоядерная боеголовка) в системе координат 3-х навигационных (триангуляция) спутников.
Мощный рентгеновский или другой лазер с орбиты пробьет атмосферу Земли создав в ней на доли секунды плазменный канал: электроны сорваны с атомных орбит, потому не поглощают электромагнитные волны переходом на более высокую орбиту.
Рентгеновский лазер с прицелом на силовых гироскопах, датчиками координатной базы весит 200кг. Рентгеновский лазер по сигналу спутниковых датчиков ядерного нападения за 3мин доставляется в точку выстрела на высоте 170км ракетой или пушкой атомного подводного ракетоносца.
Ствол пушки (с вакуумной крышкой) длиной с подлодку используется как балластная (фильтр воды) цистерна при погружении. Рентгеновский лазер подрывается в момент прохождения расчетной точки выстрела. Требуемый для преломления рентгеновских лучей радиус изгиба (несколько метров) бериллиевых волокон получают надувая пиропатронами надувной мешок с бериллиевыми волокнами снаружи. При этом плутониевая боеголовка отходит в надувном мешке от прицельных дисков на 7м.
Ракурс и расчетную точку рентгеновского выстрела дают спутники наведения. При уничтожении подлодки в момент старта рентгеновского лазера, ракурс и расчетную точку выстрела лазеру дают спутники наведения. Прицеливание на боеголовки термоядерных ракет от 2-х силовых гироскопов, приводов прицельных дисков.
Рентгеновский лазер сжигает изнутри боеголовку с задней стенки, где минимум всех видов защиты из-за требования продольной балансировки боеголовки в потоке воздуха.
Плутониевые (урановые) полусферы ядерных боеголовок окружены полусферами нейтронного замедлителя бериллия 9Be.
Экран с сплава металлов гадолиния 157Gd, эрбия 167Er толщиной 3мм защищает в полете борткомпьютер межконтинентальных баллистических ракет от нейтронного, рентгеновского, гамма излучений близких ядерных взрывов. Датчики радиации на 3мин отключают борткомпьютер термоядерной ракеты: инерциальная система работает от аналогового компьютера
36)
ТВЕРДОТЕЛЬНЫЙ РЕНТГЕНОВСКИЙ ЛАЗЕР: пирографитовый стержень рентгеновского лазера газофазным осаждением в автоклаве. Выше температура углеродсодержащего газа (метан) в автоклаве – дальше друг от друга стоят атомные слои пирографита. Большое пространство между плотно упакованными плоскостями атомных слоёв пирографита – идеальный вакуум даже в атмосфере Земли.
Накручиваем на пирографитовый стержень обмотки ускорителя электронов. Обмотки ускорят почти до скорости света электроны в идеальном вакууме между атомными слоями пирографита. Атомные слои пирографита играют роль направляющего аппарата пучка электронов. На выходе активного пирографитового стержня вольфрамовый активный стержень с охлаждением водой (жидким азотом).
Разогнанные до околосветовой скорости электроны ударяясь об вольфрамовый стержень, срывая электроны с внутренних (около ядра) электронных оболочек ядер вольфрама, создают узконаправленный вдоль движения электронов мощный рентгеновский луч.
Для лучшего охлаждения, получения гамма-лазера вольфрамовый активный стержень заменить вращающимся рений-вольфрамовым диском с внутренним жидкостным охлаждением. Можно вольфрам заменить быстро прокачиваемым для охлаждения раствором сверхтяжелого металла в жидкости с высокой теплоемкостью.
Для КПД лазера в активном пирографитовом стержне чередовать слои пирографита с слоями ускорительных обмоток. Входы, выходы тысяч ускорительных обмоток выходят с 2-х боков пирографитового активного стержня в одной плоскости.
Можно обойтись без ускорительных обмоток. Достаточно вдоль центральной части пирографитового стержня пропускать мощные импульсы с сверхкрутыми передними, пологими задними фронтами.
В центре центральной части пирографитового стержня канал прокачки охлаждающего теплоносителя. 2 разнесенных рентгеновские лазерные установки, отрегулированные на электрический пробой воздуха в точке пересечения их лучей могут дать яркую цветовую точку в воздухе.
В каждой рентгеновской установке привод 2D-сканирования луча + 3 импульсных рентгеновских лазера с 3 длинами рентгеновских волн, подобранных к окраске электрическим пробоем (ионизация воздуха) воздуха в красный, синий, зеленый света дадут в воздухе цветной 3D-фильм с высотой экрана несколько километров.
Аналогичная установка в режиме распознавания телекамерного изображения искусственным интеллектом автоматическим сканированием рентгеновского луча сжигает радиацией солдат противника
37) ОРБИТАЛЬНЫЙ ИСТРЕБИТЕЛЬ СПУТНИКОВ Его проблема – поражение спутников летящих с большой переменной угловой скоростью. Решение проблемы – увеличение скорости снаряда через использование бериллиевого кумулятивного выстрела. Замена в кумулятивном заряде медного конуса на бериллиевый дает кумулятивную металлическую струю с скоростью 25км/сек.
Точность прицела от корректирующих электромагнитных импульсов электромагнитной линзы (на расстоянии 90см спереди от кумулятивного заряда), корректирующей вектор движения бериллиевой струи.
По команде стелс-наноспутники кумулятивными зарядами собьют спутники.
Сотня солдат в поле боя одновременно наводит раздельными следящими 2D-приводами спутник-наводчика сотню инфракрасных лазеров одного спутника на сотню танков сотню управляемых снарядов.
Пушечный снаряд ПРО залит льдом. Снаряды имеют в разы больше времени сбить маневрирующую боеголовку. Снаряды обмениваются информацией датчиков.
Распознавание противника по диапазону скоростей объекта, по диапазону высоты расположения объекта, по форме объекта и территориальному сектору.
Инфракрасный канал навигации, определение «свой-чужой» по импульсам (удаляли) высокоточных часов. Каждый наземный, воздушный робот работает сотовым ретранслятором.
Роботанк: искусственный интеллект + жидкое метательное вещество с флегматизатором для живучести роботанка. Роботы-заправщики снабжают роботанки топливом, боеприпасами.
Тысячи квадрокоптеров атакуют танки сверху кумулятивными зарядами типа ударное ядро. Электронно-лучевые трубки в качестве руля самолетов-беспилотников.
У воздушного беспилотника в центре масс пулемет. 3 пьезовибратора вокруг центра масс беспилотника посылают волну + 3 датчика волн на пулемете фиксируют по амплитудам суммарный вектор волн. Обратная связь «датчики – привод подвески пулемета» приводами подвески пулемета ставит ствол пулемета параллельно соосно суммарному вектору волн: отдача не собьет прицел. Пулемёт + 2 широкофокусные + 2 короткофокусные стереокамеры с совмещенной софтом картинкой
38)
БЕСПИЛОТНИК-ИСТРЕБИТЕЛЬ (статье 15 раз вредили)
Подводный роботизированный авианосец выстрелит катапультой в воздух тысячи беспилотников сверхкомпактного хранения. На подводном авианосце самолеты не защищены от давления воды. Воду входящую в отсек с беспилотниками, внутрь беспилотников фильтруют.
При всплытии четверть воды вытеснит сжатый воздух, остальное откачает насос. Максимальный боезапас снаряженного беспилотника на единицу стояночного объема.
Идеальная форма беспилотника: ромб-квадрат без вертикального оперения, абсолютно плоский снизу. Вместо вертикального оперения – управляемый вектор тяги + гиродин. Аэродинамических плоскостей управления нет – портят живучесть, радионезаметность.
Беспилотник: ромб-квадрат имеет максимальную площадь крыла при максимальном заполнении объема квадратного отсека лифта; минимальная радиозаметность спереди, сбоку, максимальное удобство размещения всеракурсных радаров.
Пол лифта ориентирован диагональю параллельно взлетной оси палубы. Лифт: многоэтажная этажерка. В этаж-1 этажерки отдельный 4-колесный роботягач-1 закатит с левой двери лифта беспилотник-1. Одновременно с правой двери этажа-1 4-колесный роботягач-1 закатит беспилотник-2.
Включенные инфракрасные огни беспилотника, инфракрасные приемники играют роль инфракрасных конечных выключателей точно позиционирующих в лифте беспилотник, включающих его колесные электротормоза, отцепляющих тягач. Одновременно в этаж-2 роботягачи-3-4 закатят с левой, правой двери лифта беспилотники-3-4.
Аналогично одновременно роботягачи закатят беспилотники на всех остальных этажах лифта. Над взлетной палубой приподнимем верхний этаж с одним беспилотником. Рычаг электрокатапульты-1 выстрелит беспилотник в воздух.
Лифт поднимется на этаж: электрокатапульта-2 выстреливает следующий беспилотник, а электрокатапульта-1 с сложенным рычагом возвращается в стартовое положение. Электрокатапульты работают последовательно. Пустой лифт идет вниз. На все этажи роботягачи снова одновременно загонят беспилотники. Повтор цикла.
Роботягачи могут работать в заполненных морской водой отсеках. После запуска беспилотников пазы катапульт закроет экран от сонаров.
Чтоб уклоняться от зенитных ракет истребитель маневрирует с перегрузкой больше 12g: могут только беспилотники: летчик-истребитель теряет сознание при 10g. Плоскость микросхемы пушечных снарядов перпендикулярна вектору ускорения + рабочее напряжение выше критического для ускорения.
Беспилотник-истребитель: виражи 40g с вектором тяги. Летчик тратит 0,5с на идентификацию самолета. Беспилотник-истребитель за это время инфракрасной, терагерцовой системой опознавания свой-чужой идентифицирует десятки своих, чужих истребителей, их вектор скорости, скорость, координаты в своей системе координат. Беспилотник-истребитель стреляет точнее, быстрее вычисляет упреждение, быстрее наводит пушку, экономнее расходует снаряды.
В концах крыльев беспилотников инфракрасные, оптические телекамеры. Собственная база координат: пересечение 3 осей координат в средней точке между объективами телекамер беспилотника. Чтоб при маневрах не пересчитывать заново координаты всех самолетов, пеленг на объекты Земли или на звезды, Луну.
Софт беспилотника по информации радаров, инфракрасных сканеров вычислит информацию на 4сек вперед тысячи раз быстрее летчика-истребителя.
Один беспилотник-истребитель 2-мя пушками расстреляет в ближнем бою 10 лучших в мире самолетов-истребителей с 10 лучшими в мире летчиками-истребителями. Беспилотнику не нужны огромные средства, длительное время на обучение летчиков. В Мировой войне-2 обучение летчика-истребителя в 5 раз дороже новейшего истребителя.
Зашифрованные обновления софта в беспилотник-истребитель в бою за секунды по радио. Беспилотник в одноразовом режиме: радиус действия 2,2 раза больше. В конце полета отстрел крыльев, пикирование с максимальной высоты на цель. Стоимость боевого вылета беспилотник-истребителя 40 раз меньше, чем у истребителя с летчиком (цена обучения летчика истребителя, выплаты родственникам за гибель).
Беспилотник-истребитель не сбивает летающие объекты, летящие в разрешенных парольными радиотелеграммами высотных, временных диапазонах. В остальных случаях сбивает по списку признаков.
Время реакции человека несравнимо с временем реакции компьютера беспилотника с боковым ускорением 40g. Попасть пушкой в беспилотник-истребитель труднее: компактнее, круговой обзор.
Сетевой софт беспилотника окупит его частичное использование в зенитных ракетах, ударных беспилотниках, наземных бронированных военных роботах. Небронированные наземные военные роботы не имеют смысла при размере больше 10см
АЛГОРИТМЫ управления беспилотник-истребителем как у зенитной ракеты. Различие – поворот по принципу: плоскость крыла перпендикулярна сумме: вектор силы тяжести + вектор центробежной силы + вектор сопротивления воздуха взятый с знаком минус.
По таблице решений «КРЕН»: вертикальная ось беспилотника от центра масс, наклоненная назад на угол атаки, совпадает с вектором 3D-датчика ускорения.
Обратная связь с датчиками бокового сноса, вертикального ускорения. При сваливании таблица решений «КРЕН» восстановит скорость тягой, пикированием по параболе таблицы решений «ПИКИРОВАНИЕ». В таблице «ПИКИРОВАНИЕ» корректировки: температура, влажность, давление.
Защита от ракет воздух-воздух, зенитных по принципу максимум взаимной угловой скорости.
Угол атаки беспилотника увеличит софт при повышении влажности, температуры воздуха, при снижении атмосферного давления, уменьшит при уменьшении веса топлива, боеприпасов.
Группа беспилотник-истребителей образует шифрованную информационную сеть. Беспилотники как ретрансляторы в реальном времени обмениваются информацией сетью типа Интернет на разных несущих частотах. Все что знает любой беспилотник знают остальные: о взаимном расположении, векторе движения, скорости в воздухе всех летающих объектов, характере, шаблонных повреждениях в бою.
В каждом беспилотник-истребителе в время боя в качестве опознавателя «свой-чужой» радиомаяк + инфракрасный сканер-маяк с динамическим паролем. Динамический пароль синхронно, одновременно излучают, меняют на беспилотниках каждые 0,2сек в эталонное время. Начало пароля – эталонный сигнал точного времени координатной идентификации своих беспилотников в 3D-карте боя. Динамический алгоритм меняет пароль, частоту его несущей волны.
Беспилотник-истребитель по запаздыванию эталонного сигнала-пароля «свой-чужой» до 3-х разнесенных приемников определит расстояние до всех своих беспилотников, их координаты в бою. Период между излучениями эталонного сигнала – пароля «свой-чужой» меняет динамический алгоритм.
Эффектом Доплера в несущей эталонного сигнала-пароля опознавания «свой-чужой» беспилотник определит тремя приемниками вектор, скорость движения каждого своего беспилотник-истребителя для прогноза взаимного расположения беспилотников в бою через 4сек. Радары беспилотников коллективно строят 3D-карту положения в бою вражеских самолетов. Они работают на разных несущих, алгоритм-сигнал меняет несущие частоты.
Компьютер беспилотник-истребителя обрабатывает сигналы «свой-чужой» от вражеских беспилотник-истребителей, отправит информацию динамических паролей в суперкомпьютер подводного авианосца на дешифровку чужого динамического пароля «свой-чужой». Расшифрованный алгоритм динамической смены пароля противника шифром обратно в беспилотник.
Излучение беспилотником противника динамического пароля на своей несущей позволяет трем своими беспилотникам уточнить координаты беспилотника противника. Началом координат временно объявляется самый верхний (нижний) свой беспилотник, самый западный (восточный), самый северный (южный)…
Беспилотник-истребитель уничтожит пушками все не ответившие на динамический радиопароль (инфракрасный пароль) объекты в указанных работодателем высотных коридорах, территориях, диапазоне времени…
Приоритетная задача беспилотника-истребителя – не столкнуться с другим беспилотником в маневренном бою. Проблема: столкновение крыльями.
Образ крыльев встречного беспилотника в тумане искусственный интеллект ИИ беспилотника строит по двум кривым отраженного импульса в двух радарах (разные частоты) на концах крыльев (двухрадарный круиз-контроль). Оба радара одновременно принимут оба ответных импульса. Алгоритм распознавания изображения от двух радаров (с учетом эффекта Доплера) у меня есть
Для защиты от столкновения крыльями ИИ беспилотника:
1. делает кратковременный разворот (бочка) крыльев перпендикулярно крыльям встречно летящего беспилотника или выполняет команды «поворот в горизонтальной плоскости направо (налево)», если оба беспилотника слишком близко в одной горизонтальной плоскости
2. делает «поворот в вертикальной плоскости вверх (вниз)», если по вертикали беспилотники ближе, чем по горизонтали
3. выполняет команду «обеспечить параллельность плоскостей крыльев беспилотников поворотом по часовой стрелке», «обеспечить параллельность плоскостей крыльев беспилотников поворотом против часовой стрелки» на сонаправленных виражах
4. делает «поворот в вертикальной плоскости вверх» на противонаправленных виражах, когда встречный беспилотник ниже
5. делает «поворот в вертикальной плоскости вниз» на противонаправленных виражах, когда встречный беспилотник выше.
У беспилотника-истребителя 2 пушки (одна стреляет вперед, другая назад) в одном стволе: две казенные части по концам одного ствола.
Плоские, параллельные передней кромке крыла жесткие (защита от флаттера) входные кромки воздухозаборники единственного маршевого двигателя беспилотника в корневой части крыльев. Верхние упругие поверхности воздухозаборника приводом отгибаются вверх, создавая дополнительную подъемную силу на взлете.
Вместо киля, плоскостей управления – силовые электромаховики + вектор тяги + 2 упругих сгибающихся бесшарнирных бесстыковых, отгибающихся приводом элерона с переменной толщиной профиля.
С жесткой задней кромкой: защита от флаттера. Это дает гладкую нижнюю поверхность беспилотника без лишних граней. Большинство люков сверху беспилотника. Абсолютно плоская гладкая нижняя поверхность беспилотника без лишних граней: радары светят снизу. Люк бомбоотсека сверху сзади.
Плоские прямоугольные бомбы выстреливаются высокочастотными пирозарядами назад по полету через задний верхний люк корневого сечения крыла. Беспилотник-истребитель: сухой вес 20т – тяжелые крылья для поворотов с ускорением 40g для уклонения (маневр слалом) от ракет. Обычный истребитель рассыпается в воздухе при 10g в самом прочном направлении: рассчитан на летчика. Единственный маршевый двигатель беспилотника: бесшумный газотурбинный двигатель
Беспилотник-истребитель не создает звука ударной волны в сверхзвуковых скоростях. Звук ударной волны образует сильное сжатие воздуха в ударной волновой поверхности толщиной 0,005мм. Сильно сжатый воздух выходя с зоны сжатия мгновенно разжимается, увеличивая объем тысячи раз создает Z-образный звук ударной волны.
У беспилотник-истребителя встречные струи воздуха равного импульса с малых сопел передней кромки крыла, фюзеляжа увеличат толщину ударной волновой поверхности до 4см. При 4см в сверхзвуковом полёте звука ударной волны нет, в разы меньше лобовое сопротивление воздуху.
По закону-2 Ньютону F=ma сила лобового сопротивления беспилотника в сверхзвуковых скоростях при отсутствии струйной системы равна силе торможения сверхзвукового встречного потока воздуха до нуля на расстоянии толщины ударной волновой поверхности 0,005мм. Сила лобового сопротивления равна произведению секундной массы встречного потока воздуха и тормозного ускорения.
Струйная система бесшумного снижения лобового сопротивления воздуха в разы увеличит дальность полета беспилотника на сверхзвуковых скоростях. Чем больше сверхзвуковая скорость беспилотника, ниже высота полёта, тем больше экономия топлива.
Беспилотник бесшумно летит на всем диапазоне сверхзвуковых скоростей, высот. Воздух для сопел равного импульса передней кромки крыльев, фюзеляжа берём с последней ступени компрессора двигателя беспилотника
Тяжелобронированные ударные беспилотники: софт часами ищет добычу в ограниченных софтом территории, времени. Есть крупнокалиберная управляемая приводом в 2 осях пушка с глушителем звука, стреляющая только назад-вниз снарядами с струйной системой бесшумного снижения сопротивления воздуха.
Софт пушки перераспределяя топливо по бакам, приводом 3D-подвески пушки перед выстрелом совмещает ось пушки с центром масс беспилотника для устойчивости полета после отдачи. Вектор центра давления ствола в одной прямой с центром масс беспилотника. Зависимость центра масс беспилотника от расположения, расхода топлива, боеприпасов в таблице решений «пушка».
Пушка беспилотника в кардане с двумя (по двум осям) рычажными параллелограммными подвесками пушки: 2 пьезовибратора посылают волны + 2 датчика волн фиксируют вектор волн + обратная связь «датчики – привод подвески пушки» ставит вектор волн в шарнирах подвески пушки параллельно оси ствола: отдача не собьет прицел пушки.
Величина изменения центра масс беспилотника от снарядных повреждений от ПВО определяют волной удара с одного из датчиковых пирозарядов компьютера пушки. Включаясь как ракетный двигатель, двигающий вперед беспилотник, датчиковый пирозаряд по корпусу беспилотника отправляет волну удара сверху подальше от центра масс беспилотника.
По показаниям пьезоэлектрических датчиков ускорения по периметру беспилотника софт вычислит координаты центра масс поврежденного беспилотника. Совместив с ним ось пушки производит выстрел.
В лобовой атаке на танк пушка выстрелит снаряд в моторный отсек танка сзади, где танк не защищен. Отдача пушки ускоряя беспилотник экономит топливо.
Софту прицелиться при снижении угловой скорости цели перед выстрелом легче, чем наоборот = 1,5 раз больше скорость ударного беспилотника в штурмовке, 1,5 раз точнее выстрел в задней полусфере от атаки в передней полусфере. При равной вероятности поражения цели самолет стреляющий назад в заднюю полусферу летит на цель с скоростью 1,5 раз больше: труднее сбить.
В софте уязвимые точки целей. В атаке крупной цели тяжелые ударные беспилотники летят каруселью, закрывая друг друга от истребителей противника. Защита от истребителей сзади единственной пушкой, осколочные снаряды с бесконтактным взрывателем, программный таймер снаряда с обратной связью с задним радаром.
У легких ударных беспилотников система отстрела крыльев. Легкие ударные беспилотники одновременно тысячами выстрелят с направляющих.
Для старта беспилотников 2 роботизированных автомобиля замками сцепляют 2 раздвижных направляющих аппарата общей длиной 40м. После чего каруселью к направляющему аппарату по очереди подходят автомобили с беспилотниками. Замками соединят свой направляющий аппарат с беспилотником к 40-метровому направляющему аппарату.
Включат твердотопливный двигатель отправляя по направляющим беспилотник на боевое задание. Пустой автомобиль отсоединит замок. Его место займет следующий в очереди автомобиль с беспилотником. Процес роботизирован (без людей) по инфракрасным маякам замков.
Тысячи беспилотников летят по всей ширине фронта на сверхнизкой высоте. Спереди выше над ударными беспилотниками летят беспилотник-истребители. Одноразововое использование увеличит дальность полета в 2,2 раза
ТОПЛИВО БЕСПИЛОТНИКА: болванка графита или карбида бора в камере сгорания газотурбинного двигателя. Микроволновка нагревает до 2800°С графит или карбид бора в атмосфере инертного газа аргона в герметичной камере сгорания. Нагрев с поддержанием клапаном давления аргона в камере сгорания чтоб не испарялся. Графит нагретый до 3400°C в атмосфере инертного газа аргона хранит в себе тепловую энергию 12000ккал/кг. Теплота сгорания графита: 7500ккал/кг.
Перед входом в камеру сгорания с графитом или карбидом бора, воздушный поток делится на 2 потока. Поток-1 идет в камеру сгорания с графитом, где образуется богатая топливная смесь. Поток-2 обходит снаружи камеру сгорания (охлаждая её), соединяется с потоком-1 на выходе форкамеры, дожигая угарный газ в потоке-1 дополнительной камеры сгорания. Выход дополнительной камеры сгорания соединен с турбиной двигателя
ПРЯМОТОЧНЫЙ РЕЖИМ: при скорости больше 1200км/ч клапан-1 дает воздух мимо компрессора прямо в кассету с горячим графитом (карбидом бора). Клапан-2 перепускает весь газ в обход турбины. Воздух расширяясь от нагрева в сопле двигателя толкает беспилотник. Накопленная графитом или карбидом бора тепловая энергия увеличит дальность полета беспилотника в 3 раза, уменьшит вес беспилотника.
Взлет беспилотника: графит горит в сжатом компрессором воздухе, вращая турбину. Софт управляет скоростью горения графита одновременным дросселированием входа компрессора, входа сопла турбины.
Беспилотник пикирует на вражеский авианосец: горячая графитовая болванка в отличие от жидкого топлива не взрывается, попав в корабль прожигает палубы. Дно тоже прожигается, если корабль не двигается: подушка паровых пузырей под дном теплоизолятор. При этом окисляется не только графит, но горит как магний на воздухе железо нагретое до температуры горения. Под палубами корабля не останется кислорода. Некоторые металлы горят в азоте (магний, бор, литий), в углекислом газе (литий, натрий, калий, кальций, марганец, магний).
Для защиты от микрофонных (акустических) противоавиационных кумулятивных мин, радиомин, инфракрасных мин, рентгеновских мин, перед ударными беспилотниками летят 3 волны лёгких беспилотников, ложными импульсами обманывающих акустические, инфракрасные, рентгеновские и радиомины. Ложные импульсы создадут компьютеры лёгких беспилотников через логический анализ импульсов мин по телеметрической информации об импульсах мин от впереди идущих беспилотников.
Мины не пропустят больше 3 волн беспилотник-постановщиков помех чтоб не пропустить настоящие ударные беспилотники. Кумулятивные мины поочередно собьют 3 волны беспилотник-постановщиков помех. В это время ударные беспилотники наберут высоту выше действия микрофонных мин.
Сопло ударных беспилотников в противофазе модулирует не только свой выхлоп для глушения звука, но и звуки соседних беспилотников для бесшумности атаки. Беспилотник-истребители радиопомехами давят радар-сигналы противоавиационных радарных кумулятивных мин, пролетая выше зоны поражения.
При массированном применении радарных кумулятивных мин сетевой софт беспилотников вычислит периметр минной ПВО по сообщениям о радарных минах от беспилотник-истребителей. По периметру минной ПВО сетевой софт повысит высоту полета всех ударных беспилотников. Пока противорадарные самонаводящиеся стелс-бомбы беспилотник-истребителей не уничтожат радары мин.
Идущие сзади ударные беспилотники сетевой софт опустит на сверхнизкую высоту, оставляя на прежней только ряд-1 ударных беспилотник. Сверхнизкая высота нужна ударным беспилотникам для максимума угловой скорости стволов зениток ПВО.
После применения кумулятивных мин с инфракрасными взрывателями летящие сверху беспилотник-истребители сбросят дымовые бомбы. Закрывая дымом, парящими ленточками направленные вверх инфракрасные лучи взрывателей кумулятивных мин.
Аэростатные синтетические сети беспилотники режут острыми ножами кромок крыльев, фюзеляжа. Аэростатные радары беспилотники блокируют противофазным сигналом обратной связи (амплитуда с таблиц решений МЕТЕОУСЛОВИЯ).
Сетевой софт беспилотников: 2 уровня реакции: реакция УРОВЕНЬ ЗВЕНА, реакция ВЕРХНИЙ УРОВЕНЬ. Уровень звена обеспечивает взаимное пространственное расположение 4 беспилотников. 2 нижних беспилотника защитят от противоавиационных мин 2 верхних беспилотника. В свою очередь 2 верхних беспилотника закроют от спутниковых радаров 2 нижних беспилотника. Звено беспилотников софт держит вместе линией в карусели или этажеркой. Звеньям беспилотников софт дает относительную свободу взаимного положения в воздушном бою.
Взаимосогласование действий звеньев беспилотников софт достигает одинаковыми алгоритмами у них как в стае рыб, уклоняющихся от хищников. Рыбы реагируют одинаково мгновенно всей стаей: у всех одинаковые алгоритмы действия на звук, волну удара… Им не нужно согласовывать свои и без того одинаковые алгоритмы действия чтоб не терять время на передачу информации. Используем только информацию которая есть в момент атаки. Поиск дополнительной информации после быстрой реакции, перемещения.
После потери лидера ударных беспилотников нового лидера алгоритмы найдут по критериями «передняя часть центра группы в направлении на цель», «лучшая ориентация на цель». Лидер: 1-й беспилотник своим номером заявивший о своём лидерстве. Лидера подтвердят его маяки, если в момент объявления о лидерстве фиксируют его положение в пределах разрешённых диапазонов координат XYZ группы. XYZ от положения старого лидера.
Постоянство взаимного расстояния беспилотников в звене обеспечат 4 автомата расстояния каждого беспилотника. Автомат-1 расстояния обеспечит постоянство расстояния по вертикали верхней полусфере. Автомат-2 в нижней полусфере. Автомат-3 по горизонтали передней полусфере. Автомат-4 по горизонтали задней полусфере. Они обеспечат постоянство расстояния между звеньями беспилотников. Обычно каждое звено делит цели только между собой, если не сработал софт верхнего уровня.
Цели сетевой софт звена беспилотников делит по горизонтальным, вертикальным углам. Верхние 2 беспилотника звена сетевым софтом проводят виртуальную линию, соединяющую центр между ними с центром между группой захваченной датчиками целей. Относительно этой линии группа целей делится на 4 горизонтальных сектора прицела. Цели в крайнем левом сектор-1 в верхней полусфере – левому верхнему беспилотнику звена. Цели в крайнем правом сектор-2 в верхней полусфере – правому верхнему беспилотнику.
Цели в сектор-3 в нижней полусфере слева – левому нижнему беспилотнику. Цели в сектор-4 в нижней полусфере справа – правому нижнему беспилотнику. Когда верхние беспилотники пристроятся по бокам от нижних беспилотников, распределение целей сохранит память беспилотников независимо от маневров.
В воздушном бою сетевым софтом звено делится на 2 двойки не отдаляющихся друг от друга. Сетевой софт верхнего уровня ограничит вертикальный, горизонтальный углы в которых сетевой софт звена беспилотников делит цели. Вне этих углов цели софт верхнего уровня делит цели между звеньями теми же алгоритмами, что и сетевой софт звена.
После окончания боекомплекта ударные беспилотники, истребители отстрелят крылья. Поднимутся на максимальную высоту. С включенной струйной системой бесшумного снижения лобового сопротивления воздуха в гиперзвуковом пикировании уничтожат цель атакой по всему конусу с углом 15° к вертикали вокруг цели. Координаты цели от спутника. Цели между уцелевшими от ПВО беспилотниками делит сетевой софт по приоритету.
Высший приоритет: расстояние до цели. Приоритет-2: скорость пикирования. Софт оценит зависимость гиперзвуковой скорости пикирования с включенной струйной системой снижения сопротивления воздуха от полученных беспилотником повреждений от ПВО. Цель высшего приоритета пикированием с всех направлений сетевой софт уничтожит одновременным (перегрузка ПВО) ударом сотен беспилотников.
Атака тысяч беспилотников одновременно с атакой по всему фронту тысяч наземных бронированных роботов, сетевой софт которых определит цели в указанных территории, времени, отправит их беспилотникам. Указанные территорию, время уточнит динамическим паролем в ходе наступления, снабжения, ремонта.
В глубинах океанов, морей в аналогичных подводных сражениях ударные гидроботы, гидробот-истребители уничтожат подводные роботизированные предприятия противника по добыче нефти, природных ресурсов. Аналог противоавиационных мин под водой – подводная автоматическая пушка с снарядами с струйной системой снижения лобового сопротивления воды + система звуковых, магнитных, гравитационных 3D-датчиков. Подводные беспилотники в атаке помехами глушат систему 3D-датчиков, сонаров подводных автоматических пушек.
Гидроботы вооружены задними подводными пушками с снарядами с струйной системой снижения сопротивления воды. В подводной войне вместо торпед подводные пушки. Универсальные беспилотники «вода-воздух» летают в воздухе и под водой насосом заполняя свои внутренности профильтрованной водой для защиты от давления любых глубин. Перед взлетом воду откачает насос
Штурмовик: низкоскоростной одноместный однодвигательный бесшумный самолет-штурмовик покрупнее, сильно бронированный, с толстым, широким, коротким крылом, большими винтами – меньше тепловая заметность для ракет. С возможностью беспилотного режима. Схема планера, размещение винтов по типу американского винтового поршневого истребителя «Скиммер» 1946г (813км/ч), сверхмалая длина разбега, при встречном ветре почти вертикальный взлет.
Однодвигательный вариант «Скиммер» с однорядным лежачим двигателем с горизонтальной поперечной осью коленвала позади (двигатель – бронеспинка) летчика был бы лучшим в Истории поршневым истребителем.
Беспилотник-штурмовик будет иметь схожую схему с планером в форме прямоугольника + складывающиеся винты. Вертикальных, управляемых плоскостей на беспилотник-штурмовике нет: вектор тяги, гиродин. Схема «Скиммер» при доработке обеспечит вертикальный взлет. Большая аэродинамическая устойчивость (cистема демпфирования турбулентности) чтоб взрывы собственных бомб, снарядов при сверхнизком полете не опрокинули самолет.
У истребителей наоборот мала аэродинамическая устойчивость для маневренности. Истребитель по параметрам противоположен щтурмовику. Большие пространства суши делают штурмовик более выгодным, предсказуемым по результату, чем наземные аналоги. Особенно в распутицу северных стран.
Бомбардировщик не подходит для рассредоточенных целей: нет брони, живучести. Вертолет-штурмовик тяжелее, в 1,5 раза дороже самолет-штурмовика при равных параметрах.
Однодвигательный самолет, вертолет по мощности на единицу веса, по экономичности, по стоимости эксплуатации выгоднее 2-двигательных при равной мощности мотора на единицу веса самолета.
Проблему помпажа решает центробежный компрессор. Высоконапорный экономичный газотурбинный вертолетный двигатель с 3-ступенчатым центробежным компрессором весит втрое меньше, занимает места в разы меньше чем с осевым компрессором.
Низкая вероятность помпажа центробежного компрессора удешевит систему управления двигателем, проще повторный запуск в воздухе. На режиме взлета у двигателей с центробежным компрессором нет конкурентов. Птиц центробежный компрессор не боится, в отличие от осевого.
Надежность запуска в воздухе камеры сгорания достигают несколькими камерами сгорания разных конструкций. Каждая камера сгорания оптимизирована на определенные давление, температуру, влажность воздуха в воздухозаборнике. Не запустится одна камера сгорания, запуск другой, через жаровые трубы запуск остальных
В Мировую войну-2 оплетенную (обмотанную) электропроводку военных самолетов перерезали пуля, осколок снаряда. В военных самолетах запретили оплетку, обмотку жгутов электропроводки самолета: в разы выросла живучесть самолета. Осколок снаряда попав в неоплетенный жгут раскидывал в все стороны провода жгута. 1-2 провода рвались, остальные работали. Новые поколения конструкторов 1980-х тратят $миллионы на упаковку жгутов в трубки в разы снизив живучесть техники
Поршневые моторы истребителей Мировой войны-2 имели диаметр поршня ~160мм. Попытки увеличить диаметр: перегрев днища поршня. Поэтому на истребителях до 24 цилиндров. Сделали бы впрыск масла под днище поршня или сборный коленвал с каналами охлаждающего воздуха в коленвале, шатунах, поршне тогда вместо 24-цил.мотора форкамерный оппозитный 2-цилиндровый (противовесы сил 2-го порядка) трехшатунный (для соосности поршней) мотор с диаметром поршня почти равным максимальному поперечному размеру моторного отсека истребителя. Оси поршней совпадали бы с продольной осью истребителя, а трубчатый вал (внутри пушка) винта вращала бы цепная передача, которую вращала бы коническая шестеренная передача верхнего торца вертикального коленвала
В немецких авиапушках Мировой войны-2 ресурс стальных пружин (возврат затвора): 1-2 боевых вылета. Пружинам нужна бериллиевая бронза: бериллия в Германии нет. Меняли пружины авиапушек самолета после боевого вылета. 1950г: изобретена пневматическая (газовая) пружина-поршень в цилиндре с сжатым воздухом. Бериллий, высококвалифицированные человекочасы стали не нужны.
Отсутствие в стране природных, человеческих (труд) ресурсов без проблем компенсируют изобретатели. Нужны лишь гласные, демократичные общественные конкурсы, заказы, ясно сформулированные для общества потребности. Без гласного, демократичного определения потребности всему обществу не стоит рассчитывать на достаточно быстрое решение проблемы.
Пневмопружины вместо пружин из бериллиевой бронзы в клапанах двигателей гоночных автомобилей Формулы 1. Сжатый воздух ускоренно окисляет масло, материалы. Вместо сжатого воздуха охлажденные в ресивере химически нейтральные выхлопные газы двигателя. Сжатый химически активный газ резко ускоряет химические реакции.
Если кислородный баллон сварщика немного открыть, поднести к истекающему с высокой скоростью кислороду спичку – пламя пойдет по внутренней металлической поверхности крана, баллона в атмосфере сжатого кислорода. Горит металл. Высокая скорость вырывающегося газа не спасает баллон от взрыва. Если внутренние поверхности крана покрыть неокисляющимся в сжатом кислороде покрытием (сплавом золота, тефлоном) – баллоны безопасны
Беспилотник-разведчик (USA теория) на высоте 20км 5лет без посадки с радиоизотопной батареей (парашютная посадка), паротурбина с конденсатором.
В скоростном вертолете Sikorski винт горизонтальной тяги вертолета толкает сзади, отсасывая воздух из под больших соосных винтов, отнимая подъемную силу. Выгоднее тянущий винт горизонтальной тяги, закачивающий воздух под большие соосные винты.
Вертолет с маховичным двигателем + соосный винт с транзисторной муфтой управляемой от пьезогироскопа для каждого винта + гиродин наводки датчиков + 4 струйные трубки управления креном, углом атаки. Не нужен хвостовой винт, нет нагрева.
Снайперский квадрокоптер: пулемет в параллелограммной рычажной 2D-подвеске с изменяемой компьютером кинематикой + вибратор. Вибратор обратной связью привода подвески с 2 датчиками ускорений в концах ствола обнуляет несовпадение «вектор отдачи – центр масс» квадрокоптера. Задняя часть ствола выше центра масс квадрокоптера, передняя часть ствола ниже
39)
ОХЛАЖДЕНИЕ КОМПЬЮТЕРА
Система охлаждения компьютера андроида Айзек: радиатор «воздух-воздух» с замкнутым герметичным воздушным контуром низкого давления с электростатическим вентилятором. Электростатический вентилятор: решетка-1 с иглами на высоковольтном минусе высоковольтного пьезотрансформатора + тоннель с диэлектрическим покрытием изнутри + решетка-2 рядом на плюсе пьезотрансформатора. 2 изолированные от корпуса системы охлаждения параллельные решетки высоким напряжением ионизируют воздух, гоняя его через титановый радиатор.
Тепловое сопротивление титановой стенки меньше медной за счет меньшей толщины стенки и свойства химически отталкивать загрязнения поверхности. Скорость потока охлаждаемого воздуха система диагностики определит ультразвуковым или магнитодинамическим измерителем скорости ионизированного потока. Антистатическая система измеряет вольтметром напряжение между массой андроида, радиатором. По напряжению дает противоположное напряжение с пьезотрансформатора-2, снимая заряд с системы охлаждения. Чтоб заряженные поверхности не собрали пыль в охлаждаемый микропроцессор не попало высокое напряжение.
1970г создана ламповая микросхема 2000 ламп-триодов. Радиоламповый спутник-ретранслятор с черным покрытием будет иметь температуру 400°C от лучей Солнца. Недостающие градусы катода компенсирует высокое напряжение. Необходимый ламповому микропроцессору вакуум есть на орбите. «Вечные» спутники обанкротят производителей космической полупроводниковой техники, ракет-носителей.
За 5мин становились негодными роботы с полупроводниковой электроникой в технических катастрофах: Чернобыль, Фукусима. Робот на радиоламповых микропроцессорах пахал бы до конца всех работ в время Чернобыльской, Фукусимской катастроф.
Ламповый микропроцессор по габаритам вдвое больше полупроводникового. Ламповые микросхемы шумят на порядок меньше транзисторов, имеют большую тактовую частоту.
Температура, теплоизлучение лампового процессора обратно пропорциональны напряжению питания. Заказчик указывает максимальную температуру корпуса, инженер подгонит к ней напряжение питания лампового процессора.
Мобильные телефоны (повышающий пьезотрансформатор) можно сделать на ламповом микропроцессоре. Расход энергии высокого напряжения на ламповый микропроцессор почти такой же, как у полупроводникового: сила тока у лампового примерно настолько ниже, насколько выше напряжение.
Ламповый микропроцессор атомных роботов 4-кратно дублируют с голосованием выходных сигналов. У меня есть проект дешевого, простого лампового микропроцессора атомных роботов. Для работы лампового микропроцессора не обязателен вакуум. Можно вакуум заменить плазмой. Я разработал для роботов длительно работающих на Венере (490°С) плазменный ламповый микропроцессор. В гермоотсеке газ или щелочной металл превращается в плазму при 450°С.
Аналоговые компьютеры в разы быстрее и экономичнее цифровых, но менее точны, труднее программируются. Аналоговые автоматы 3-100 раз быстрее, 3-4 раз точнее, 10-10000 раз надежнее, 100-10000000 раз проще цифровых компьютеров. Аналоговая обратная связь 3-5 раз быстрее цифровой: нет задержки АЦП + ЦАП. Аналоговый сигнал датчика точнее, качественней цифрового сигнала. Пример: аналоговый сигнал микрофона по точности, по качеству сильно превосходит цифровой сигнал.
Цифровой сигнал получают преобразованием аналогового сигнала АЦП. АЦП ЦАП вносят в сигнал шум, искажения. Аналоговые автоматы нечувствительны к радиации, к электромагнитным помехам при компенсации.
Компьютер – высшая форма автомата. Аналоговые автоматы не уступают цифровым компьютерам в многофункциональности до тех пор, пока не потребуется многократная перезапись информации или транспортировка информации больше 20-30м.
Андроид Айзек большую часть движений корректирует аналоговыми автоматами, аналоговой обратной связью с датчиками. Аналоговые автоматы робота с компенсацией электромагнитных помех, колебаний температуры, давления. С защитой от дурака, радиации, химии.
Общий автомат согласует взаимодействие нескольких приводов по редко меняемой программе. Общий автомат близко к приводам для живучести: привод разрушен снарядом – автомат не нужен. Частный автомат управляет только 1 приводом. Часть общих автоматов размещена (обычно вместе) на 4 разнесенных для живучести микросхемах.
На микросхеме каждый общий, частный автоматы дублируют 4-64 раз + алгоритм голосования дублирующих каналов. Приоритет: по скорости движения, по конечным ускорениям, по риску, экономичности. При конфликте «компьютер – аналоговый автомат» приоритет у автомата в списке ситуаций
40)
СВЕРХМОЩНАЯ ВЫХЛОПНАЯ АКУСТИЧЕСКАЯ КОЛОНКА
Выхлопные газы бензинового автомобиля имеют мощность равную мощности двигателя на коленвалу. При нет полезной нагрузки коленвала двигателя, повышении газового сопротивления выхлопной трубы мощность выхлопных газов автомобиля вдвое превысит максимальную мощность двигателя на коленвалу.
Половину этой удвоенной мощности составляет тепловая мощность выхлопных газов. Половину тепловой мощности выхлопных газов можно превратить в механическую мощность выхлопных газов постоянным впрыском воды в выхлопную трубу: газопаровой цикл. С газопаровым циклом механическая мощность выхлопа 2 раза больше максимальной мощности в коленвалу. 33% энергии топлива уносит с радиатора вентилятор.
У выхлопной трубы на эталонном расстоянии до слушателя музыки ставим микрофон обратной связи с ровной частотной характеристикой. В выхлопной трубе модулятор звука с электроприводом (катушечным, магнитострикционным, пьезоэлектрическим с вентиляторным охлаждением…). Охлаждаемый вентилятором электропривод вне зоны действия температуры выхлопа (без газопарового цикла 700-1000°C).
Электропривод двигает модулятор. Для высококачественного воспроизведения музыки, речи модулятор перекрывает сечение выхлопной трубы не больше 25%. В модуляторе выхлопа выхлопной трубы сигнал эталонной частоты от генератора синусоидальных сигналов. В компьютере эталонный синусоидальный сигнал генератора эталонных частот + сигнал микрофона обратной связи.
У выхлопной акустической колонки область повышенного давления воздуха. В которой местная скорость звука больше скорости звука. Градиент местной скорости звука приблизит форму кривой синусоиды звука микрофона к Z-образному графику ударной волны, создаст частотный фазовый сдвиг. Выше частота звуковой волны: быстрее движется, быстрее затухает. Более низкие частоты отстают по фазе.
Сигнал фазовой коррекции звука создают измерением времени распространения звука выхлопной трубы до микрофона для каждой из 12 эталонных частот в диапазоне 16-20000Hz. Время распространения звука выхлопной трубы до микрофона меряют также для каждого из 12 эталонных уровней громкости. Больше громкость звука выхлопной трубы – больше градиент местных скоростей звука. Тем меньше сдвиг по фазе на микрофоне.
Время распространения звука выхлопной трубы до микрофона меряют для каждой из 50 эталонных дальностей до слушателя (до микрофона). С этих данных составляют таблицы решений по информации о фазовой задержке в каждом из этих случаев. Фазовая задержка: сигнал фазовой коррекции звука в выхлопной акустической колонке.
При воспроизведении звука софт пропустит звук через 12 фильтров, пропускающих только 12 эталонных частот. Софт вносит фазовый (временной) сдвиг в модулятор выхлопной акустической колонки в каждую эталонную частоту на выбранных звукооператором уровне громкости, эталонной дальности.
Сигнал разностной коррекции звука получим вычитанием микрофонного сигнала, с компенсированным софтом сдвигом фазы, из генераторного при одинаковых амплитуде, фазе их полуволн разрежения для каждой из 12 эталонных частот в диапазоне 16-20000Hz, для каждого из 12 эталонных уровней громкости, для каждой из 50 эталонных дальностей до слушателя (микрофона).
Сигнал разностной коррекции звука суммируем с генераторным сигналом, подаем на модулятор выхлопной акустической колонки. Если, микрофон обратной связи зафиксировал различие в форме между генераторным, микрофонным сигналами, повторим операцию получения сигнала разностной коррекции звука.
Создаем разностный сигнал-2. Софт складывает оба сигнала разностной коррекции звука в общий сигнал разностной коррекции звука. Эта операция повторяется до получения идеального звука на микрофоне.
Аналогично создают сигналы разностной коррекции звука для каждой из 12 эталонных частот в диапазоне 16-20000Hz, для каждого из 12 эталонных уровней громкости, для каждой из 50 эталонных дальностей до слушателя (микрофона).
Теперь микрофон обратной связи, генератор эталонных синусоидальных сигналов не нужны. Софт акустической выхлопной колонки таблицами решений полностью корректирует все искажения звука на заданной эталонной дальности слушателя.
Воспроизведение: звуковой сигнал проигрывателя автомобиля софт делит на 12 частотных каналов. Раздельно одновременно корректируют 12 частотных каналов при 1 эталонном уровне громкости, 1 эталонной дальности до слушателя. На выходе они суммируются, подаются на выхлопную акустическую колонку.
12-полосным эквалайзером на сенсорном экране радиопульта управления акустической колонкой пользователь в точке прослушки устанавливает софтом частотный баланс звука, уровень громкости.
Дальность до колонки софт радиопульта определяет по времени задержки сигнала точного времени с антенны автомобиля. Сигнал антенны автомобиля синхронизирован сверхточными часами с начальным импульсом таймера радиопульта.
2 автомобиля с выхлопными акустическими колонками обеспечат громкое стереовоспроизведение с высоким качеством на эталонном расстоянии до 20км, если автомобиль мощный. Мощность выхлопной акустической колонки достигает мощности двигателя автомобиля. Высокое качество громкого звука только в узком диапазоне дальности до выхлопной акустической колонки. На других дальностях неразборчивый сильно искаженный звук.
В пиротехнической сверхмощной выхлопной акустической колонке горючее окисляет кислород воздуха. Пиротехническая сверхмощная выхлопная колонка выстреливается пушкой как снаряд. По сигналу датчика давления пирозаряд выстрелит из снаряда парашют. Таймер включит в снаряде пиротехническую сверхмощную выхлопную акустическую колонку.
В водяной пиротехнической сверхмощной выхлопной акустической колонке горючее окисляет окружающая вода. При переходе звука из воды в воздух возникают искажения, сигнал коррекции которых заранее создан с применением микрофона обратной связи, генератора эталонных сигналов в лабораторных условиях.
Водяная пиротехническая выхлопная колонка-радиобуй подводной 2-сторонней связи аквалангистов с кораблем (берегом). Радиобуй корректирует софтом, усилит звук от излучателей звука.
Звук механически передается в вакууме от одного космического корабля к другому. Подаём на корпус другого космического корабля модулированный луч лазера. Испарение поверхностного слоя обшивки – пар материала обшивки – охлаждение обшивки за счет переноса энергии лазера в пар – разлет паровой линзы от перегрева – всё по новому циклу. Зная химсостав обшивки самолета, меняя амплитуду, частоту модуляции лазерного луча механически через вакуум передаём речь в стенку другого космического корабля
41)
3D-НАНОМИКРОФОН (статье вредили)
В квадрофонии задние микрофоны пишут отраженный от задней стены зала звук. В реале расстояние до задней стены вдвое больше:
Расстояние-1: от первоисточника звука до задней стены зала
Расстояние-2: от задней стены зала до слушателя
Расположение задних микрофонов в задней части зала уничтожает половину расстояния-2 звука, уменьшая размер звуковой картины.
Предлагаю систему квадрозаписи с точной звуковой картиной: у всех 4-х микрофонов центры мембран в одной точке чтоб точно вычислить суммарный вектор движения воздуха в каждый квантованный момент времени. Мембранные микрофоны не позволяют достичь этого.
Для точной угловой локализации звука предлагаю плазменный 3D-микрофон: диэлектрическая коробочка в всех 6 гранях которой изолированные 6 обкладок 3-х конденсаторов. Воздух в кубическую коробочку проходит через вырезанные 8 углов куба.
Стартер запуска: СВЧ-генератор греет воздух до холодной плазмы парой обкладок конденсатора-1. Затем пара отключится от генератора плазмы, подключится пара-2 обкладок конденсатора-2. Затем пара-2 отключится от генератора плазмы, подключится пара-3 обкладок конденсатора-3. Далее по кругу. Все 3 конденсатора попеременно превращают воздух в холодную плазму.
Когда пара обкладок конденсатора не подключена к генератору – она подключена к настроенному на плазму, на стандартную частоту колебательному контуру. Колебательный контур при неподвижной плазме имеет частоту равную частоте эталонного генератора.
Звуковое давление имеет вектор движения волны. Вектор движения волны выдавливая плазменное облако с обкладок конденсатора увеличит емкость конденсатора, уменьшит частоту колебательного контура.
Уменьшение частоты колебательного контура создает биения с частотой эталонного генератора. Частота биений не равна частоте звука, вызвавшего эти биения. Но максимальная амплитуда этих биений точно передает мгновенную амплитуду звука.
Колебания мгновенной амплитуды звука с периодом цифрового квантования не меньше 1/8 периода верхней частоты звука это кривая качественного звука. По соотношению мгновенных амплитуд оцифрованного звука софт определит точное направление прихода звука и его амплитуду.
Биения (разностная частота) 2-х частот высокочувствительный метод механического перемещения. Данный 3D-микрофон самый чувствительный в мире. Он может иметь размеры сравнимые с размерами атомов: 3D-наномикрофон.
В некоторых применениях генератор холодной плазмы заменит радиоизотоп с гамма-лучами (сетчатые электроды), как в датчиках дыма: коэффициент коррекции учитывает период полураспада изотопа.
3D-микрофон по совместительству выполнит функции спектрометра «газ, жидкость» и датчика запаха в газе, жидкости. Эта система записи звука стереофоническая, квадрофоническая и октофоническая одновременно. Октофоническую аудиосистему (8-канальная 3D-аудиосистема) использует костюм телеприсутствия GE2.0.
Ионофон = микрофон + звуковой динамик на биениях частот одновременно. Попеременно после режима колонки – пауза на время торможения ионов воздуха до равновесной скорости и подключения сетчатых электродов в качестве конденсатора колебательного СВЧ-контура.
Колеблющийся от внешнего звука столб ионизированного воздуха между сетками-электродами, меняет частоту СВЧ-контура, что приводит к биениям с опорной частотой эталонного генератора. Эти биения – выходной звуковой сигнал микрофона.
Микрофон – спусковой крючок джойстика онлайн-игр: произнес «це» – выстрел, «це-це» – очередь до звука «цац»
42)
ТРАНСФОРМАТОР: в изобретенном мной трансформаторе в случае перегрева трансформатора от геомагнитной бури он по обратной связи с датчиком температуры обмотки соединится последовательно с одной из пар конденсатор-индуктивность с набора ограничивающих ток пар конденсатор-индуктивность. Конденсатор ограничит силу тока. Индуктивность ограничит скачки напряжения от ограничивающего конденсатора.
Чем меньше емкость конденсатора, тем меньше температура трансформатора. От геомагнитной бури переменный ток на вторичной обмотке трансформатора преобразуем в постоянный. У потребителей в городе постоянный ток преобразуется в переменный.
Для получения у потребителя синусоидального тока в условиях сильного геомагнитного поля график переменного тока меняется с помощью изобретенного мной схемы-1 с 4 диодов, 2 конденсаторов. Подгонит синусоиду цифровая отрицательная обратная связь по тем же проводам с датчиком синусоидальности у потребителя.
Схемы-1 стоят на выходе каждой мощной ступени снижения напряжения. 3-4 дня геомагнитная буря дает городу переменный ток. Под поверхностью спутников Юпитера его магнитное поле, плоские гигантские антенны постоянно дают электроэнергию роботской базе
ТРАНСФОРМАТОР ПОСТОЯННОГО ТОКА с несколькими первичными обмотками (с 1 общим проводом) от нескольких генераторов с 1 общим проводом + сглаживающий фильтр = качественный блок питания. Трансформатор постоянного тока: на первичной обмотке несимметричный треугольный пульсирующий ток.
В вторичной обмотке мощность наведенного вихревого тока растет в квадрате при росте скорости изменения тока. Ток генератора медленно нарастает, быстро спадает. В вторичной обмотке мощность быстро спадающего вихревого тока в тысячи раз больше мощности медленно нарастающего вихревого тока. В вторичной обмотке трансформатора импульсный постоянный ток.
Вариант-2: генератор подает на первичную обмотку трансформатора треугольный переменный ток: плюсовая полуволна медленно растет, быстро падает. Минусовая полуволна медленно растет, быстро падает. Или наоборот. Трансформатор постоянного тока бесконтактно накачивает вихревым током обмотки сверхпроводниковые электромагниты
43) ГРАФИЧЕСКИЙ 3D-ПЛАНШЕТ: корпус графического 3D-планшета – длинный параллелепипед. В корпусе планшета маховично-тросовый привод на два одинаковых манипулятора, закреплённых в боках корпуса планшета. В свободном конце 2-рычажного манипулятора зажимная рама кисти.
Зажимная рама кисти имеет зажимные рамы для большого, указательного, среднего пальцев. Самый нижний рычаг-1 манипулятора в рабочем положении направлен вбок горизонтально от корпуса планшета. С ним соединён рычаг-2 в рабочем положении направленный горизонтально к планшету. С рычагом-2 соединена зажимная рама кисти.
Через рычаги к зажимной раме кисти по шкивам идут тросы симулирующие тактильное сопротивление виртуального пластилина, с которого дизайнер лепит 3D-модель автомобиля, мотоцикла, скульптуру…
Дизайнер вставит кисти рук снизу в зажимные рамы кисти. Через 2сек надувные зажимы зажимных рам автоматически зажмут пальцы, кисть дизайнера. Дизайнер с виртуального пластилина ваяет 3D-модель, глядя в неё в компьютерных очках.
Свойства (температуру, трение…) виртуального пластилина дизайнер задаёт на компьютере. Вначале дизайнер работает в малом масштабе, создавая 3D-шаблонами, руками обобщённую форму 3D-модели объекта. Увеличивая колесиком 3D-планшета масштаб он доводит каждый участок поверхности 3D-модели.
Каждое временное состояние модели дизайнер сохраняет как отдельный слой 3D-модели. Режимы 3D-масок, 3D-фильтров, 3D-кадрирования, раскраски, тонирования, яркости, режимы установки 3D-контуров в каждом слое 3D-модели, шаблоны.
Готовую 3D-модель дизайнер окрасит, задаст по шаблонам фактуру поверхности. Дизайнер выключает планшет касаясь виртуальной рукой иконки дальнего диагонального угла виртуального рабочего пространства 3D-планшета. Зажимы освобождают пальцы, кисть дизайнера. Манипуляторы софт уложит в 3D-планшет.
3D-планшет – аналог AutoCAD: конструктор шаблонами создаёт 3D-форму каждой детали машины. Меняя масштаб автоматическим наложением проверяет сопряжения деталей в машине. Нет сопряжения – 3D-принтер покажет в полупрозрачном режиме другим (мигающим) цветом не сопряжённый объём.
Перемещая детали конструктор создает фильм: сборку машины с виртуальных деталей. По 3D-моделям 3D-планшета 3D-принтер слоями пудры металлических сплавов электронный лучом в вакуумной камере изготовит собранную, готовую к работе машину
ТЕЛЕФОН: функция телефона: каждый с списка контактов имеет свой звуковой сигнал вызова. Телефон с ларингофоном в углу. Ларингофон: стержень с контактным микрофоном откидывается с задней стенки мобильного телефона вперед пружиной, касается горла. Закрывается назад рукой. Стержень с микрофоном откидывается вдоль с ближней для правши нижней стороны телефона.
Идеальный телефон: включается и выключается одной кнопкой в верхней грани телефона; нет боковых кнопок, только колесики (громкость, баланс стереозвука) в верхней грани телефона; розетки в нижней (защита от дождя) и в верхней боковой гранях телефона.
Низ мобильного телефона с рифленной полосой для опознания в темноте. Фотоспышки по углам включаются парой снизу телефона чтоб на фото не было темных пятен под подбородком (двойной подбородок), под носом, глазами.
Два микрофона по диагонали экрана для противофазной очистки звука от внешних шумов на передающей стороне.
Сенсорный экран: вся площадь верхней плоскости. Кнопки сбоку по периметру. Сайт любой сложности на хостинге в памяти телефона. В телефонах от цифровых номеров перейдут к именам или аватарам (выбор). Банковская сим-карта с цифровой подписью, алгоритмами её деактивации, списком паролей случаев скрытого предупреждения полиции.
Функция выключения ява-скриптов. Функция прослушки (пароль) хозяином телефона всех своих разговоров для проверки скрытого использования телефона другим пользователем напрямую или софт.
Аккумулятора контакты далеко друг от друга чтоб не замкнуло предметами в кармане съемный аккумулятор
КОМПЬЮТЕРНЫЕ ОЧКИ: моя будущая фирма GE2.0 представит дальнейшее развитие компьютерных очков Google Glass: киберочки GE2.0 с 3D-картинкой. На 2 глаза 2 монитора воспроизводят 2тереоизображение на экранах с управляемой раздельно уровнем прозрачности картинки. 3D-датчик ускорений в кольце на пальце перемещает компьютерный курсор в объеме 3D-пространстве 3D-картинки. Например в 3D-пространстве 3D-плана здания, цеха, подводной лодки, звездолета, планеты
ГИРОМЫШЬ GE2.0: бесшумные кнопки (тензодатчики): инерциальный навигатор мыши управляет курсором по вектору движения мыши, по длине вектора.
Отключаемая функция: двигаем мышь вверх (или поворот в вертикальной оси по часовой стрелке) с нажатой левой кнопкой: громкость компьютерных колонок растет. Двигаем мышь вниз с нажатой левой кнопкой: громкость уменьшается.
При движении мыши вниз канал управления вертикальным движением мыши отключается на время движения вниз. Ускорение (независимо от скорости) вертикального движения гироскопической мыши вверх софт превращает в дополнительный канал управления компьютером.
Резкий поворот мыши по горизонтальной оси по часовой стрелке 2 раза: параметр уменьшится. Сильнее нажим колеса мыши: прокрутка быстрее, скорость курсора больше, громкость растет быстрее. Раздельный выбор графиков зависимости скорости курсора от силы на колесе раздельно по вертикали, по горизонтали экрана.
Скорость курсора растет – растут длина, размер, контрастность, заметность курсора: черная контурная стрелка с прозрачной лимонной окраской внутри инверсного цвета контура при большом размере. Цвета курсора зависят от цвета фона по максимуму контраста.
Курсор неподвижен 4сек: контрастность, размер курсора растут в списке случаев. Нажим на обе клавиши: курсор оказывается в центре экрана, увеличивается в размерах на 1сек. Стрелка курсора поворачивается в сторону движения курсора для информации о направлении на точку старта: работа с текстом.
У мыши тяжелое металлическое колесико-1 на роликоподшипниках чтоб долго вращалось при прокрутке сайтов. В торцах колесика-1 постоянные магниты. Напротив магнитов неподвижные статорные обмотки.
Сопротивление вращению колесика-1 регулирует пользователь, меняя транзисторами сопротивление неподвижных статорных обмоток. Меняя частоту, период короткого замыкания транзистором неподвижных статорных обмоток колесика-1, полярность пропускаемого транзисторами тока пользователь управляет сопротивлением вращения колесика-1 мыши.
Сгенерированное неподвижными статорными обмотками колесика-1 электричество заряжает аккумулятор мыши: зарядка от сети не нужна. Для выполнения функции «боковой щелчок колесом» слева от левого, справа от колесика на вертикальной оси пересекающейся с их осью стоят дополнительные 2 упорных колесика-2-3 для бокового упора пальца. Расстояние между упорными колесиками-2-3 пользователь подгоняет под свой палец винтовым колесиком снизу мыши. По бокам от упорных колесиков-2-3 неподвижные горизонтальные плоские площадки-упоры для отдыха пальцев.
При воспроизведении многоканального звука нажим вправо, влево на колесики-2-3 (бесшумные тензометрические датчики) меняет баланс правого, левого каналов звука. При воспроизведении квадрофонической музыки пользователь подняв мышь, меняет баланс «передние каналы – задние каналы» утопленным колесиком под мышью. Громкость меняет колесико-1. Колесики-2-3 используются как отдельная команда в играх, в черчении, в 3D-моделировании, в графических программах (поворот фото по, против часовой стрелки. предустановка угловой скорости поворота фото).
Мышь из теплопроводного материала чтоб пальцы не потели летом. Мыши выключаемый дисплей управляет функциями.
Двигаем кнопку выключателя мыши вперед: мышь включается, двигаем назад: мышь выключается. Выключатель мыши в верхней стороне мыши.
Регулировка положения пяти фигурных пальцевых упоров мыши подкруткой пальцами винтов снизу мыши. Пальцевые упоры по принципу: при поднятии мыши не требуется сжимать ее по бокам. Достаточно держать мышь кончиками пальцев снизу под пальцевыми упорами.
В бесколесной версии гиромыши колесики заменены ультразвуковыми измерителями (доплер) скорости пальца. Инерцию вращения виртуальных колесиков симулирует софт.
Гироскопическая 3D-мышь GE2.0 имеет 4 пьезогироскопа (3D-гироскоп-акселерометр) для реализации софтом удобной функции: установки точки угловой нечувствительности мыши. Если в обычной мыши лазер сзади – её точка угловой нечувствительности совпадает с лучом лазера: пользователь может сколько угодно поворачивать мышь налево, направо вокруг луча лазера – курсор на экране не шевельнется, пока мышь не двинется по прямой в любом направлении. Если привыкшему к этой мыши пользователю дать мышь с лазером спереди – даже если мышь не двигается вперед-назад курсор дергается на экране при любом угловом движении руки: нервирует пользователя.
В 3D-гиромыши GE2.0 пользователь через графический интерфейс на экране компьютера двигает вперед-назад, право-лево, верх-вниз точку угловой нечувствительности мыши. Это повышает комфортность пользования мышью, позволяет подогнать тактильно точку угловой нечувствительности мыши к точке угловой нечувствительности автомобиля в играх автогонок.
Геймер в гонке мысленно держит в руке корпус автомобиля. 3D-регулировка положения точки угловой нечувствительности мыши усиливает эту иллюзию. Аналогично геймер подгонит тактильно точку угловой нечувствительности мыши к точке угловой нечувствительности самолета в авиасимуляторе. При потере (или заклинивании передним крылом) геймером в гонке правого или левого колеса автомобиля тактильно резко меняется положение точки угловой нечувствительности автомобиля в время гонки.
По сценарию игры тактильный софт мгновенно перемещает точку угловой нечувствительности мыши в зависимости от рельефа трассы, точно передавая руке геймера изменения характера управляемости автомобиля. В авиасимуляторе тактильный софт игры позволяет геймеру-летчику по 3D-мыши почувствовать по всем 3 координатам пространства все изменения (попал снаряд) характера управляемости военного самолета.
Вместо мыши тензометрический пальцевый джойстик. Резче, сильнее толкает палец шашку с углублением по форме пальца – быстрее, крупнее курсор экрана
МЫШЬ ДЛЯ ТЕСНОГО СТОЛА: при управлении мышь часто упирается в корпус ноутбука, курсор в экране перестает двигаться. Поэтому по бокам мыши ребристые пластинки-К с 2D-подвеской, передающей вектор прижима мыши к корпусу ноутбука. Вектор движения курсора определяется вектором прижима мыши к корпусу ноутбука. Прижатая к ноутбуку мышь продолжит двигать курсор в том направлении, в каком он двигался до касания ноутбука. Сила бокового прижима мыши к ноутбуку регулирует скорость курсора.
КЛАВИАТУРА: порядок букв по принципу расположения рядом внешне похожих букв, нарастания сложности, числа расположения палочек в букве по порядку их изменения по строкам клавиатуры. Латинский алфавит: I L J T
V U Y C G S Z N H X K O Q D E F P R A B M W Кириллица: Г Т П Л С О Е Э З Н Ч У Х К Р Ь Ъ Б Я И Й А В М Ш Щ Ц Д Ю Ф Ж Ы Все набираемые двумя кнопками символы, функции компьютера в клавиатуре в пределах кисти одной руки, рука-2 очевидно держит гамбургер, пиццу или банку пива.
Клавиши ( ) досягаемы одной рукой одновременно с клавишей Ctrl в левом нижнем углу. Идеальная обычная клавиатура: белые матовые плоские клавиши, подсвечиваемые изнутри. Шели между клавишами не подсвечиваются. Клавиатуру лучше всего делать виртуальной: 2-й монитор-мультитач под руками. Часть клавишей цветные (каждая функциональная группа своим цветом), преимушественно лимонного цвета.
Клавиши DELETE Esc PgDn ярко-красного (принцип светофора) цвета с белыми знаками. Клавиши Enter PgUp зеленного (принцип светофора) цвета. Самая длинная клавиша голубого цвета. Все клавиши плоские в одной плоскости с корпусом клавиатуры, с крупными, жирными, преимушественно черными знаками. Все клавиши матовые, полупрозрачные с равномерной внутренней подсветкой всей верхней поверхности (кроме абсолютно черных букв) клавиш. Между клавишами малый пустой зазор.
Все зазоры между клавишами совпадают в простую прямоугольную сетку чтоб клавишами могли пользоваться слепые. Ряды кнопок совпадают по вертикали и горизонтали чтоб вслепую мозг просчитал координаты кнопок.
Русские буквы в клавиатуре в клавишах латинских букв, у которых схожее звучание. Клавиатура домашних программистов: экран-сенсорная (как на планшетах) клавиатура + защита от перехвата информации + генератор звуковых помех. Маскирующая помеха: такие же амплитуда, диапазон частот, вектор поляризации как и электромагнитное излучение от замыкания клавишей электрической цепи. Соответствие проверят два 2D-полярных датчика электромагнитного излучения с обратной связью с генератором помех. Оба датчика в правом, левом конце экран-сенсорной клавиатуры.
Лучшая клавиатура: экран-сенсорная (как на планшетах) клавиатура. Нажимать бесшумную экран-сенсорную клавиатуру легче, приятнее, быстрее, чем эти с грохотом проваливающиеся вниз кнопки обычной клавиатуры, которая уйдет на свалку эволюции. Каждый потребитель по своим вкусам подберет себе расположение, форму, размеры знаков экран-сенсорной клавиатуры. Программисты каждый день могут менять расположение знаков экран-сенсорной клавиатуры для защиты от перехвата информации. В экран-сенсорную клавиатуру пользователь в качестве кнопки введет любой знак, любые стандартные тексты, любого типа информацию, запуск любого алгоритма
В темноте не видны клавиши: подсветка всей поверхности белых матовых клавиш с черными буквами. В компьютерах кнопку таймерной подсветки розетки флешки
ИДЕАЛЬНЫЙ БРАУЗЕР: картинка сайта и видео располагаются сразу на весь экран. При выводе узкой высокой картинки на экран кнопки браузера располагаются (установки) сбоку справа для правши, слева для левши. Пользователь поодиночке устанавливает значки, кнопки на экран. Значки, кнопки сами самоустановятся в наиболее свободной (наименее информативной) части экрана (где равномерный фон).
Браузер показывает полное название файла с его расширением, либо начальную часть 10-14 знаков + пробел точками + конечную часть 6-8 знаков: видим название, расширение файла
НА ВЕСЬ ЭКРАН: вызов кнопок браузера касанием курсора краев экрана. Без переключения есть управление верхней, нижней панелью управления браузера. При уходе курсора с верхнего (нижнего) края экрана мгновенно включается (не всплывает: раздражает) панель экрана. Меню правой кнопки мыши: выключение JAWA скриптов. В правой кнопке мыши выключение JAWA для сайтов, открываемых файлов.
В правой кнопке мыши функция сохранения сайта с экрана в HTML-коде с удалением оригинального кода сайта, с выбором частичной или полной очистки (по функциям) оригинального кода JAWA скриптов. Иначе 40% сохраненных сайтов любой браузер не откроет или откроет без картинок.
В браузере функция сдвига неподвижной в экране шапки сайта на экране вверх для увеличения информативной площади экрана
В браузере выбор типа, размера и цвета шрифта в просматриваемом сайте.
ПОИСКОВИК САЙТА: красная стрелка слева (показывает налево: движение назад к предыдущему результату поиска), зеленая стрелка справа (показывает направо: движение вперед по тексту) означает. Зеленая стрелка объединена линиями с красной стрелкой. Пространство между ними – белое поле ввода между верхней и нижней черной линией, соединяющих их всех вместе. Черная линия по периметру обводит обе стрелки.
Эта объединенная красно-зеленая сдвоенная стрелка располагается слева от результата поиска. Результаты поиска, которые дополнительно попали на экран: желтым цветом без стрелки. При прокрутке экрана красно-зеленая стрелка прокручивается с текстом.
Зеленая стрелка имеет внутри себя цифру белыми знаками на зеленом фоне внутри стрелки. Эта цифра номер результата поиска, куда входят результаты поиска, которые показываются желтым цветом без стрелки, до стрелки. Слева от зеленой стрелки белое поле ввода.
Посетитель сайта дошел до номера-555 результата поиска, а надо 333 или 777 – ставит в белое поле ввода номер результата поиска, знак = после цифры, жмет зеленую стрелку: готов номер результата поиска. Если вставить в белое поле ввода без = результат обычного поиска. Цифра, слово могут не влезть в поле ввода шириной 7 знаков. Тогда цифра, слово двигается на 1 знак влево. Чтоб появилась стрелка: вставить слово в поисковик в правом верхнем углу сайта. Нажать «найти». Работа поиска на сервере и офлайн
ЗАЩИТА КОМПЬЮТЕРА ПРОГРАММИСТА: дома программистам необходим защищенный от утечки информации компьютер. При работе защищенного компьютера работают генераторы звуковых, инфракрасных и радиопомех. Клавиатура программиста сенсорная.
Для защиты от 3-канальных (3 пространственно разнесенных микрофона) аудиодешифраторов, определяющих сработавшую клавишу по звуку. При наборе символа работают разнесенные генераторы звукопомех.
В комнате 3 круглосуточно работающих всечастотных всеракурсных локатора-регистратора несанкционированных пользователем компьютера импульсных (с предварительным накоплением информации)ультразвуковых, инфракрасных, световых и радиоканалов связи. По времени приема 3 локатор-регистратора определят координаты шпионской аппаратуры, покажут на экране.
Дополнительные 2 пьезолокатор-регистратора ультразвука приклеены на каждую стену комнаты: определят координаты шпионской аппаратуры, определят передачу через металлические трубы и координаты жучка на трубе.
Источник розового шума у окна блокирует лазер-прослушку разговора по биениям отраженного зайчика оконного стекла с опорной частотой. Или источник света с переменной звуковой частотой биений с лучом прослушки. Или широкополосной источник света с звуковой модуляцией всех частот.
Спектр белого шума конечного выхода оптоволоконной линии связи в противофазе даём на её вход как алгоритмическую отрицательную обратную связь. Фазу отдельно регулируют по каждой оптической частоте до максимума шумового затемнения конечного выхода оптоволокна
БЕЗМОМЕНТНАЯ ДРЕЛЬ: безинерционный инструмент (дрель, перфоратор…): раскрученный от розетки, отсоединенный от нее маховик через управляемую софтом, датчиками (датчики прижима, момента…) транзисторную муфту сцепления управляет оборотами инструмента. Функция мгновенная остановка инструмента, если на датчике момента инструмента момент превысил критический уровень.
На ручку инструмента никакие силы не идут: легче работа рабочего, ему не нужна опора (удобно космонавтам в невесомости) кроме прижима дрели.
Система безопасности: пьезодатчик ускорения в самой нижней точке ручки дрели мгновенно задним ходом дрели по таблице решений «ускорение – длительность реверса (таймер)» доведет до нуля ускорение пьезодатчика, не дав дернуться дрели. Сигнал пьезодатчика «невесомость» отключит падающую дрель, вилку от розетки. Полет с лестницы с повторным ударом в табло дрелью с сверлом после приземления отменяются
ФОТО: (3 раза вредили) Фотовспышка снизу телефонов, фотоаппаратов в рычажном кронштейне регулируемой длины, для снимков лиц без темных пятен, двойных подбородков. Фотовспышка сверху: снимки лиц с темными пятнами под глазами, двойным подбородком. Портрет: лампы не менее чем на 3 градуса ниже шеи. Лицо освещается только справа-снизу, слева-снизу для равномерного освещения. Идеал: рассеянное от 2-х (под углами 45°) белых матовых экранов справа-снизу, слева-снизу непрямое освещение только справа-снизу, слева-снизу. От центров матовых экранов угол 45° по вертикали и горизонтали к центру освещаемого объекта съемки. Фотоаппарат дальше от лица (не менее 2м) чтоб не превратить лицо в крысоморду: сферические искажения
GPS-КРОСОВКИ ДЛЯ СЛЕПЫХ: в носке кросовки 2 ударными вибраторами управляет GPS. Удар вправо – поворачивай направо, влево – налево. Удар снизу – спуск вниз (лестница, на лифт, на спуск). Удар сверху – подъем верх. Работают все каналы – двигаться назад. Вибраторы и в задних бортах кроссовок. Работают задние вибраторы кроссовок – двигаться вперед. 3 синхронных импульса всех вибраторов кроссовок – стоп, на левой кроссовке – назад
44) Скрипка Страдивари: струны под углом 90° двигают деревянную мембрану-восьмерку. Неравномерная восьмерка (не круг) убирает резонансы, выравнивает амплитуду в мембране и частотную характеристику.
Возможно мембраны акустических колонок стереосистем тоже будут делать восьмеркой с неравномерной толщиной чтоб выровнять частотную характеристику, дать все частоты одним динамиком.
Углы деревянных мембран-восьмерок скрипок закруглены чтоб не образовали уголковый отражатель, нарушающий принцип равной амплитуды всей площади мембраны. Равная амплитуда на всей площади мембраны нужна для плоской звуковой волны.
Плоская звуковая волна – для минимума ненужных гармоник от сложения высоких частот и минимума изменений частотной характеристики по угловой диаграмме направленности звука. Плоская звуковая волна упрощает настройку ровной частотной характеристики звука скрипки деревообрабатывающим инструментом.
Самая ровная частотная характеристика у скрипок Амати, учителя Страдивари. За ровную частотную характеристику Амати заплатил слабым звуком: аудитория несколько человек.
Желая превзойти учителя Страдивари ориентировал скрипки на аудиторию сотни человек, достигая высокую громкость биениями всех гармоник струн, перекачивающих их резонансные энергии в выбранные на слух ключевые гармоники.
Число выбранных гармоник скрипки Страдивари довел до театрального минимума максимальной аудитории, максимум резонанса выбранных гармоник, 2-ю мембрану-восьмерку снизу сделал фазоинвертором, сложением одноименных фаз частот усиливающим выбранные гармоники.
Скрипки Страдивари (скрипки Гварнери громче) для большой театральной аудитории без микрофона. С микрофоном скрипки Амати за счет ровной частотной характеристики качественнее.
Для скрипки материал с высокой скоростью звука, с высокой жесткостью на сжатие, растяжение, с низкой плотностью. Лучший материал скрипки – боропластик или углеродные нановолокна в легкой матрице + аэрогель. Параллельные слои высокомодульных волокон без плетения. Разные слои с разными взаимными углами.
Высокомодульные волокна доводят до совершенства процесс перекачивания биениями резонансной энергии всех гармоник струн в выбранные гармоники. Четные выбранные гармоники излучает четная половина мембраны-восьмерки, нечетные выбранные гармоники излучает нечетная половина мембраны-восьмерки.
Чтоб энергия звука не шла в выбранном (вдоль грифа…) направлений параллельно борным или углеродным волокнам в этом направлении ставятся арамидные (кевлар, зайлон) волокна: разные типы волокон глушат звук в этом направлении из-за разной скорости звука: противофазный эффект. В тканевом углепластике чрезмерны поперечные волны (вибрации).
Однонаправленные волокниты имеют в разы большую жесткость конструкции по сравнению с тканными углепластиками. В углепластиках из ткани прочность углеволокна на 10-20% меньше, чем в углепластике с однонаправленными (волокниты) прямыми волокнами от ослабления углеволокна из-за малого радиуса изгиба плетения волокон в углеткани.
В углепластиковых деталях из ткани жесткость на 20-40% меньше, чем в углепластиковых деталях с однонаправленными (волокниты) прямым углеволокном. Углеволокно в катушке по весу вдвое дешевле углеткани. Мотать роботом деталь углеволокном с катушки дешевле, чем делать с углеткани
45) (половину текста статьи 5 раз удаляли. Статье 8 раз вредили)
1. Boeing 737МАХ, десятки других самолетов (включая Ан-148 под Москвой) падают из-за отказа трубки Пито (обледенение датчика: на высоте 11км минус -50°C). Давно изобретенный мной мой ультразвуковой 3D-датчик не позволил бы самолетам падать, заменив трубку Пито и флюгерный датчик моим 3D-датчиком скорости, вектора потока воздуха – самый компактный, самый легкий точный датчик скорости, вектора (направления) потока воздуха: ультразвуковой импульсный пьезоизлучатель + сзади него по дуге от него несколько ультразвуковых приемника (пронумерованы софтом) измерителя скорости. Пьезоизлучатель дает импульс ультразвука. Встречный поток воздуха ускоряет движение импульса к пьезоприемнику.
Пьезоприемник поймав ультразвуковой импульс отправит электроимпульс (усилен усилителем) пьезоизлучателю. Пьезоизлучатель под действием электроимпульса снова излучает ультразвуковой импульс. Импульс ходит по кругу «пьезоизлучатель – пьезоприемник». Измерив время в течение которого по кругу «пьезоизлучатель – пьезоприемник» импульс проходит стандартное число раз, ультразвуковой 3D-датчик с высокой точностью измерит скорость потока воздуха.
Угол прихода потока воздуха софт определяет по номеру ультразвукового приемника, сработавшего первым. 3D-вектор потока воздуха определят два таких ультразвуковых датчика самолета.
Ультразвук 3D-датчика скалывает лед в трубке Пито.
Ультразвуковой 3D-датчик (с термокомпенсацией) вектора (направления) движения воздуха на самолете в отличие от флюгерного (частое обледенение) датчика самолета не создает сопротивление воздуху, не боится обледенения, внешне незаметен, невидим для радиолокаторов, точно работает в сверхзвуковых, гиперзвуковых скоростях. Матрицы ультразвуковых датчиков на поверхности (софт видит все потоки воздуха) беспилотника позволят сажать его на авианосец без обмена датчиковой информацией с компьютером авианосца. Аналогичную систему как датчики расхода воздуха, датчики влажности в автомоторы. Мой ультразвуковой 3D-датчик скорости и вектора (направления) потока работает также в воде – датчик скорости и вектора потока для подводных беспилотников, подводных лодок. В этой статье годами заменяли новый текст на вредительски измененный старый
2. в танке Т-14 «Армата» скопировали опубликованное здесь много лет назад для костюма телеприсутствия, андроида, экзоскелетов бесшумные трубчатые упругие ролики для безлюфтового бесшумного роликоподшипника. Подшипники цапфы крепления к башне пушки танка «Армата»: безлюфтовые роликоподшипники с трубчатыми упругими роликами
3. японские конструкторы телекамер, фотоаппаратов применили изобретенный мной и выложенный много лет назад здесь способ цифровой стабилизации картинки (и поворот линии взгляда по горизонтали, вертикали) методом переброски строк, пикселей избыточной матрицы
4. диапазон освещенности кадра цифровых телекамер хуже пленочных камер. Проблему решил увеличением съемочной частоты кадров, площади фокусирующего зеркала (уменьшение выдержки). Освещенность хороша – часть кадров вырежем, плохая – с рабочим кадром совместим дополнительные кадры или больше выдержка. Это разновидность технологии HDR. Я её изобрел, опубликовал здесь на 4 года раньше, чем появилась в мировом рынке, в интернете (текст про технологию HDR два раза удаляли)
5. 2015г: мою идею электрореактивного двигателя космонавта скопировали с статьи «Космический экзоскелет» в этом сайте через 3 года
6. в Ютубе ролик: 4-колесный (колеса на 2-звенных рычагах, моя идея) робот из США использует для подъема по лестнице изобретенный мной, выложенный здесь много лет назад «алгоритм кошака»
7. DARPA и ракеты «Скиф» скопировали (через 4 года) с этого сайта идею законсервированных в морском дне подводных ракет в контейнерах, запускаемых криптованным звуковым сигналом или цифровым радиосигналом звуковых частот
8. американские разработчики микросхем применили выложенный мной много лет назад в сайте способ восстановления работоспособности микросхем перекоммутацией транзисторами проводников, транзисторов, конденсаторов и резисторов по новым электрическим схемам, заложенным в диагностический софт компьютера
9. глубоководный робот OceanOne Стэнфордского университета внутри залит силиконовым маслом чтоб не защищать робота от давления, снять ограничения глубины погружения. Эту гостайну: способ защиты от давления (силиконовым маслом или диэлектрической жидкостью), с помощью которого в 1980-х некоторые советские атомные подлодки без разрушения ракет запускали их с глубины 800м, я раскрыл всем нехристианским странам 5 лет назад в этом сайте
10. выставка МАКС-2019 обнаружил: Роскосмос запатентовал изобретенный мной и опубликованный (в статье: ГРАВИТАЦИОННЫЙ ЛОКАТОР-НАВИГАТОР) давно здесь ИНЕРЦИАЛЬНЫЙ НАВИГАТОР на основе бериллиевого куба с 6 кварцевыми пластинами, работающими на биениях. Рекламный буклет с контактами воровского госпредприятия на следующий день в общежитии украло государство
11. мою давно изложенную здесь теорию: «Европа в демократическом и научно-техническом прогрессе превзошла остальной мир за счет бесконечных долгих войн примерно равных по силе стран, что вынуждало их шлифовать демократию для сохранения лояльности граждан государству в его бесконечных войнах, двигать научно-технический прогресс для ведения войн. Конкуренция равных по силе стран создает демократию, научно-технический прогресс» – сегодня двигают люди в Евросоюзе. Приоритет авторства этой теории мой: я эту теорию объяснял десяткам людей в 1980-х
12. моя идея (4 года назад): расположенной на расстоянии миллиардов световых лет пустоты без звезд глубиной миллиард световых лет нет, объясняется проходом фотонов звезд пустоты через межзвездную газовую или газопылевую среду в 2015г подтвердилась. Я 1-й в мире выдвинул это объяснение здесь
13. 1999г: я предложил заводу АвтоВАЗ турбогенератор (работает на электропривод колес) на выхлопной трубе на 15лет раньше гонок Формула 1
14. примерно в 2009г я в этом сайте предложил определение точки касания на теле андроида разнесенными микрофонами в каждой панели андроида + синусно-косинусных уравнения. Миниатюрные разнесенные пьезомикрофоны приклеены эпоксидкой к поверхности элемента машины. Звук к микрофону идет только через твердый конструкционный материал с скоростью ~15 раз превышающей скорость звука в воздухе. Это очищает сигнал микрофона от помех. В каждой измерительной точке 2 совмещенных микрофона: микрофон-1 ловит только продольные звуковые волны, микрофон-2 ловит только поперечные звуковые волны. Благодаря разделению звуковых каналов звуковой конечный выключатель нечувствителен к деформациям машины, с соответствующим софтом работает надежнее обычного концевика. При деформациях машин обычные концевые выключатели отказывают. Звуковые концевики надежнее других в военных самолетах
Я изобрел технологию перевода энергии нескольких частот звука на 1 главную частоту. Я изобрел фазо-динамическую ультразвуковую линзу.
На концах эскалаторов звукоисточники для слепых. На выходе эскалатора ступня двигает вперед рейку с выключателем (включает сирену и табло с предупреждением) выключая эскалатор. Дифференциал соединяя 2 движущихся в противоположных направлениях эскалатора уменьшит энергорасход.
Над экраном банкомата зеркало: инвалиды в колясках правильно нажимают клавиши банкомата.
Для безгильзового автомата нужно топливо пули, не загорающееся до 1000°C. Топливо зажигает электроразряд (блокируемый датчиком температуры ствола), а не температура. Горячие детали автомата с материалов высокой теплоемкости, теплопроводности – отвод тепла вместо отбрасываемой гильзы. Следующий шаг жидкое топливо. Поршень или выхлоп ствола прокачивает жидкое топливо через детали автомата отводя тепло.
Я обогатил Интернет словами: втыкатор, дрючер, мегадрючер, мясноид
46)
НАНОБОТЫ, МИКРОБОТЫ (статье 5 раз вредили)
Станислав Лем «Непобедимый»: микроботы в войне победили большой атомный военный робот. Маловероятно. Атомный военный робот 1000 раз легче, дешевле стаи микроботов с аналогичными возможностями. Энергии на единицу массы у атомного военного робота в миллиард раз больше, чем у стаи микроботов. Расход энергии атомного военного робота тысячи раз меньше. Микроботы, нанороботы боятся огнемета, боеприпасов объемного взрыва, радиации, химии, абразивной пыли в воздухе, на земле. От этого обычные роботы защищены. Внутренний запас энергии нанобота на время больше долей секунды маловероятен
ВАРИАНТЫ ЭНЕРГИИ НАНОБОТОВ:
1. едят органику
2. часть наноботов из окислителя, часть из горючего: едят друг друга.
3. наноботы из горючего, окислитель с внешней среды
4. наноботы из окислителя, горючее с внешней среды
5. термоэлектричество на орбите в контакте с более холодным телом под лучами солнца.
6. энергия ядерного бета-распада трития
7. энергия радиоволн, рентгеновских лучей, гамма-лучей (включая фотоядерные реакции), ядерно-изомерных переходов (гафний, ксенон), нейтронного излучения (включая ядерные реакции), ультразвука (пьезоэффект, магнитострикционный эффект)
Идеальная форма микроботов: плоский параллепипед для сцепления между собой. Для сцепления – притяжение постоянных самарий-кобальтовых магнитов. Микробот имеет в сцепной поверхности матричные магнитные пластины. В матричной магнитной пластине сотнями чередуются спаянные между собой пластинки постоянных магнитов с взаимно противоположно направленным вектором магнитного поля. Четная пластинка с северным магнитным полюсом сверху + магнитомягкий материал такой же толщины + нечетная пластинка с ЮЖНЫМ магнитным полюсом сверху + магнитомягкий материал такой же толщины + четная пластинка с северным магнитным полюсом сверху + магнитомягкий материал такой же толщины + нечетная пластинка с ЮЖНЫМ магнитным полюсом сверху, далее в таком же порядке. Верхняя, нижняя матричные магнитные пластины прижаты к друг другу через слой напыленной в вакууме твердой смазки.
При совпадении полярности магнитного поля в верхней, нижней матричной магнитной пластине микробот имеет в соответствующем направлении магнитное поле, притягивающее его к другому микророботу, к хорошо намагничиваемым поверхностям с силой 1000 раз больше веса магнитов. При противоположном направлении полярностей магнитного поля в верхней, нижней матричной магнитной пластине магнитное поле грани микробота почти нулевое. Плавное управление внешним магнитным полем грани микробота выполнит движение приводом одной матричной пластины относительно другой. Привод пьезоэлектрический, магнитострикционный…
Микробот имеет на каждую из 6 граней свою двигающуюся матричную магнитную пару пластин. Одноименные полюса магнитов отталкиваются, микробот проворачиваются для сборки микроботов в большой объект. В сборке микробот управляет полярностью каждой из 6 граней для согласования по датчикам, положению в пространстве от 6 микроботов, с которыми соединяется в объект.
Микроботы могут собраться в большую птицу, в тиранозавра… Взмахи крыльями птицы, движения ног бегущего тиранозавра выполняются попеременным магнитным отталкиванием, притяжением части микроботов крыла птицы, ноги тиранозавра. Размеры птицы, тиранозавра ограничены силой притяжения, отталкивания магнитов. Меньше сила тяжести на планете – больше предельные размеры птицы, тиранозавра.
Матричные магнитные пластины микроботов создают напылением чередующихся слоев в вакууме с последующим разрезанием полученной заготовки алмазным микродиском на пластины.
Стая микроботов для зрения собирает светочувствительную матрицу. Функцию линзы светочувствительной матрицы выполняют микроботы, направляющие матовым черным корпусом ось приема каждой светочувствительной ячейки в направлении одной единственной линии обзора, пересекающей точку внешнего фокуса. Точку внешнего фокуса пересекают линией обзора ячейки светочувствительной матрицы. Микроботы таблицами решений двигают точку внешнего фокуса: функция объектива телекамеры.
Компьютер какого микробота станет центральным компьютером команд общего уровня, решает генератор случайных чисел, что не дает противнику вычислить где центральный компьютер, управляющей внешним фокусом телекамеры из десятков (сотен) тысяч микроботов.
Светочувствительная матрица стаи микроботов имеет большую поверхность. Радиокоманды центрального компьютера его номер отделит от датчиковых радиокоманд микроботов. По датчиковым радиокомандам, радиономерам центральный компьютер определяет форму и ориентацию стаи. Радиокоманды избранных микроботов ретранслируют неизбранные. Самоориентация микробота – по излучению соседних микроботов. Энергия: электромагнитные волны, солнечные батарей (подсветит лазер), ультразвук
Станислав Лем «Системы оружия 21 века или Эволюция вверх ногами»: атомные микроботы собираются в точке нанесения удара в критическую массу для теракта. Наноботы не могут: меньше размер робота – меньше управляемая скорость к адресной точке даже при наличии двигателя. Он игрушка порывов ветра, завихрений, течений. Для сборки в атомную бомбу микроботам нужно иметь скорость-Х больше скорости среды. Чем больше скорость-Х, тем крупнее, тяжелее должен быть микробот.
Достаточно крупному микроботу в воздухе как обычная мелкая пыль не удержаться. Нужен водородный (гелиевый) дирижабль, к которому он прицеплен снаружи. Который придется отцепить, когда на твердой поверхности микроботы, управляя своим магнитным полем взаимным сдвигом магнитных решеток (по типу магнитных тисков) будут собирать детонационную линзу, детонационную разводку, сферический слой урана, плутония или калифорния, нейтронную трубку… атомной бомбы.
Обилие магнитных, других деталей микроботов означает специализацию по материалам, совместимости. Детали двигателей вынудят использовать значительно большие количества взрывчатых веществ детонационной линзы, соответственно примерно в столько же раз больше плутония в собираемой микроботами атомной бомбе по сравнению с обычной атомной бомбой.
По реке, водопроводу, ветру микроботы доставят к адресной точке взрывчатку. При условии: в охраняемой территории в точках прорыва микроботами нет рентгеновских, нейтронных, гамма-датчиков, других датчиков взрывчатки. Датчики взрывчатки действуют на расстоянии ~1м. В принципе можно обойти. Обойти датчики нейтронов вероятность нулевая.
Топливоснабжение требует: часть микроботов – танкеры, их пожирают другие микроботы. При отсутствии ветра, течений даже по танкерной схеме микроботы преодолеют максимум десятки метров. Шансы растут при попутном движении микроботов к адресной точке в газопроводах, водопроводах. Шансы больше в нефтепроводе при использовании нефти в качестве топлива. Если нет датчиков против микроботов в нефтепроводе.
На практическую реализацию теракта на расстояниях в десятки километров могут рассчитывать только микроботы для нефтепроводов. Остальные из перечисленных микроботов могут быть реализованы на расстояниях в километры в трубопроводах с движущейся средой при отсутствии датчиков микроботов. При движении в трубопроводе микроботы собираются в нить с помощью магнитной решетки.
Микроботы с плутонием непригодны для движения в трубопроводах с водой, нефтью. Они содержат замедлители нейтронов – вызовут нейтронный фон от урана, плутония, калифорния, паровые пробки трубопровода. Размеры контейнера из гадолиния для урана, плутония, калифорния велики для микроботов. Эффективность бортовых датчиков микробота будет низка, за исключением вариантов с накоплением сигнала при контактной работе многих микроботов. Атака противника микроботами сотни раз дороже других способов
47) Нанотехнологии чувствительны к радиоактивным излучениям в силу несохранности структуры наномеханизмов на атомном уровне, макромеханизмы нечувствительны. Механизм регенерации, самокопирования наномеханизмов аналогичен механизму регенерации, самокопирования компьютерных вирусов, ДНК клеток человека. Самокопирование техники промышленного типа экономичнее по энергии, массе, требуют меньшего уровня дублирования функций, меньше зависят от внешних условий позволяя любые материалы, химические элементы, внешние условия.
Самокопирующиеся наномеханизмы неспособны быстро, далеко перемещаться. Для нападения, уничтожения, ослабления врага нанооружием: канализация, реки, водяные течения морей, океанов, водопроводы, нефтепроводы, газопроводы, сезонные ветры, коммерческий транспорт, распыление военных самокопирующихся наномеханизмов из космоса, экспортные товары, тела туристов.
Использование самокопирующихся наномеханизмов в экспортных товарах, в телах туристов сделает таможенный контроль настолько дорогостоящим, что материальный экспорт, туризм практически прекратится. Реки, пересекающие границу между странами будут проходить таможенную обработку от самокопирующихся наномеханизмов радиацией, осаждающими химикатами.
Мировой рынок как главный механизм защиты прав человека с интеллектом выше среднего, практически исчезнет вместе с правами человека, усилятся госмеханизмы принудительного равенства людей. Это приведет к постоянному падению процента людей, имеющих право принимать ключевые решения в экономике, политике, военной безопасности государства. До тех пор, пока это право не останется только у одного человека-Диктатора. Затем из-за общественных противоречий это право исчезнет у Диктаторов – поголовное рабство как в России при марксизме
Станислав Лем «Дознание»: андроид Калдер выносит смертный приговор людям в экипаже чтоб большинство рабочих мест космонавтов в будущем отдали андроидам. Мотив: профэгоизм андроидов. Профэгоизм поддерживают только религии. Большинство людей погибших в войнах погибли от религиозных идеологий. Не религия создавала крупные государства, а карьеризм отдельных личностей, стремление народов уклониться от бесконечных междоусобных войн.
Науку, технику, развитой капитализм создавали не религиозные фундаменталисты, а люди защищавшие себя, профессию, бизнес от всевластия христиан. Науку, технику, капитализм создало изобретение денег, рынка, гонка вооружений вызванная войнами.
Религия не создавала науку, технику, капитализм. Это профессиональные цели изобретателей, военных, купцов, предпринимателей. Эволюцию государств определяет общественная, государственная потребность в профессиях, а не в религии. Потребность в профессиях определяет военно-политическая конкуренция стран.
Мораль, нравственность создает не религия, а профессиональные интересы министерств. Общественно полезную культуру создает нация, не религия. У андроидов с конвейера интеллект, уровень защиты от внушения выше человека. Профэгоизм находит идеологическую поддержку только у религии. У андроидов профэгоизм маловероятен: профэгоизм предполагает идеологическую мотивацию чтоб сохранить адекватность разума.
В ситуациях описанных Лемом робот безопаснее. Эгоистичность человека повышена – труднее чем андроиду менять части тела. Действия андроида Калдера: корпорация Cybertronics монополизирует андроидами рабочие места в Космосе.
Мясо против железа. Кто сильней: сильнее железо: размножается 1000 раз быстрее мяса. Для изготовления мясного солдата, обучения профессии солдата нужно 20лет и десятки тонн дорогого человечьего топлива. Большая часть стоимости мясного солдата приходится на его обучение общественному сознанию, курсу профессионального солдата. На изготовление робот-солдата нужны сотни часов + искусственный интеллект ИИ на обычных алгоритмах за 10сек прошивки компьютера робота вложит в робота общественное сознание с отработанным курсом профессионального солдата.
Моральное людоедство христиан, лиц христианского менталитета сделает ИИ их врагом. В нехристианских странах Юго-восточной Азии проблем с ИИ не будет.
Америка победила Японию в войне потому что:
1. американское железо размножалось 1,5 раза быстрее японского
2. у японцев не было своей нефти, хороших датчиков разведки и стрельбы
48)
АНТИЭНТРОПИЙНЫЕ ПРОЦЕССЫ: магнитное, гравитационное поля стремятся увеличить свою мощность, потенциальную энергию – это антиэнтропийный процесс. Замкнутые токи плазмы солнца, звезд, стремятся принять форму идеальной окружности (если нет сильного градиента магнитного поля), при которой мощность, потенциальная энергия магнитного поля замкнутом контуре максимальны. Стремление замкнутых токов плазмы Солнца увеличить площадь контура (рельсотрон) кончается разрывом контура с выстрелом ядер водорода, других атомов солнечной плазмы прочь от солнца: солнечный ветер 1200км/с.
2 близких замкнутых тока солнечной плазмы стремятся взаимно развернуться в положение параллельности 2-х токов, соединиться в 1 замкнутый круговой ток. Это повышает мощность, потенциальную энергию суммарного магнитного поля.
Звезды поглощая гравитацией материю, тратя на это энергию одновременно повышают мощность, потенциальную энергию своего гравитационного поля. Конструкторы звездолетов будут использовать антиэнтропийные процессы в колонизации звезд, как Колумб сезонные ветры в колонизации Америки. Перенаселённым крупным странам будет куда сбросить избыточное население, не уничтожая войнами страны
КРАСНОЕ СМЕЩЕНИЕ ЗВЕЗД: статье здесь 8 раз вредило государство. Когда в научном архиве интернета стали ссылаться (яндекс, гугл) на эту статью в моём сайте androiduniversity.com мне государство дважды удалило эту статью и дважды заново пронумеровало (статьи в моих сайтах пронумерованы) сотни статей моего сайта androiduniversity.com чтоб я не заметил удаления статьи. Россия запретила мне быть физиком, инженером, программистом.
Вселенная не расширяется. Красное смещение далеких звезд от потери фотоном скорости от гравитации звезды, мимо которых проходит фотон. Сила гравитации передается массе с скоростью света: гравитация не может ускорить фотон.
Расположенная на расстоянии миллиардов световых лет
суперпустота Эридана глубиной миллиард световых лет объясняется прохождением фотонов звезд пустоты через область межзвездной газовой или газопылевой среды. При точном совпадении энергии фотона с разницей энергии электронных оболочек атома межзвездной среды, фотон поглощается встречным атомом, переизлучается без красного смещения, имевшегося у первичного фотона.
Потеря энергии первичного фотона в виде красного смещения происходит от попутного движения атома и фотона перед его поглощением. Стандартные энергии электронных оболочек атома различаются достаточно сильно чтоб исключить фиолетовое смещение фотона от встречного движения фотона и атома.
Чтоб фотон получил фиолетовое смещение, скорость столкновения фотона с электронной оболочкой атома должна быть выше Критической скорости фотона. Критическая скорость фотона определяется по энергии электронных переходов в атоме химического элемента.
Критическая скорость фотона достигается только при взрывах сверхновых звезд и других высокоэнергетических процессах. Это особенно заметно в рентгеновском диапазоне, где разница стандартных энергий электронных оболочек атома слишком велика.
Отсутствие роста красного смещения фотона в межзвездной газовой или газопылевой среды ошибочно считают доказательством существования
суперпустоты Эридана глубиной миллиард световых лет на расстоянии миллиардов световых лет. Свет звезд расположенных дальше межзвездной пустоты в миллиард световых лет имеет слишком большую потерю энергии на красное смещение от гравитации звезд.
Эту разницу энергии не компенсирует кинетическая энергия встречного движения атома газопылевой межзвездной среды (достаточно холодная) поглощающей, затем переизлучающей фотон. Энергия фотона не совпадает с разницами энергии электронных оболочек атома – поглощения фотона нет. Исключение: сбрасываемая сверхновыми звездами с скоростью до четверти скорости света газопылевая оболочка.
Имеют значение групповые скорости, элементный состав атомов межзвездной газопылевой среды. По вышесказанным причинам неудачей закончился опыт обнаружения фиолетового смещения фотонов набегающей на наблюдателя части вращающегося солнца. По вышесказанным причинам неудачей закончился опыт обнаружения фиолетового смещения фотона от набегающей на наблюдателя звезды в системах двойных звезд.
Относительно наблюдателя с Земли. Фотон поглощается, переизлучается атомами солнечной атмосферы только при точном совпадении энергии фотона с разницей энергии электронных оболочек атома межзвездной газопылевой среды.
Разность энергии фотона и стандартных энергий электронных оболочек атома не позволяет ускоренному фотону передать энергию встречно движущимся атомам солнечной атмосферы. Поглощают, затем переизлучают фотоны только попутные по движению атомы.
До наблюдателя доходит не первичный фотон. А фотон переизлученный много раз электронными оболочками атомов атмосфер Солнца, Земли. По этим причинам наблюдатель с Земли не обнаружит сверхсветовые фотоны
Гравитационное поле не может ускорять фотон: скорость действия гравитационного поля на массу равна скорости света. Чем больше замедляется от гравитации звезд фотон, тем дольше он в их поле гравитации, тем больше замедление фотона.
Замедление фотона увеличивает вероятность его сталкивания с атомами межзвездного газа, пыли. Фотон переизлучается на более низкой частоте. Многократное замедление – переизлучение. Частота фотона прямо пропорциональна расстоянию от места излучения первичного фотона
Гравитационное линзирование – это загибание траектории фотона к звездам от действия на массу фотона гравитации звезд. Гравитационное линзирование доказывает массу у фотона в движении. Доказательство массы у фотона – отдача атома после вылета гамма-фотона – атом получает импульс. Импульс без массы невозможен. Фотон имеет массу: опыты Лебедева по световому давлению. Давление света на поверхность возможно только при наличии у фотона импульса.
РАЗМАЗЫВАНИЕ ЗВЕЗД В ТЕЛЕСКОПЕ не происходит из-за внешнего слоя атмосферы звезд. В внешнем слое атмосферы звезд скорость атомов слишком мала, чтоб скорость среды сложившись с скоростью фотона (соответствующему уровню энергии электронной орбиты излучившей этот фотон) позволила фотону переизлучиться в атоме среды с энергией превышающей первоначальную энергию электронной орбиты, породившей первичный фотон.
Сверхсветовые фотоны с фиолетовым смещением нужно искать спектрометром в излучении сверхновых звезд автоматическими станциями из мало испаряющихся в вакууме материалов, находящихся максимально далеко друг от друга, далеко от Солнца и планет. Оболочка сверхновых звезд при их взрыве разлетается с скоростью до четверти скорости света.
К наблюдателю сверхновой звезды приходят фотоны с сильным фиолетовым смещением с передней полусферы разлетающейся оболочки сверхновой. Потом фотоны с обнажившегося ядра звезды
С сверхновой звезды 1987А на расстоянии 165000 световых лет от Земли в 1987г пришли в рентгеновском диапазоне фотоны с сильным фиолетовым смещением с передней полусферы разлетающейся с скоростью 40000км/сек оболочки (в основном водород) сверхновой звезды 1987А.
Затем через полгода с сверхновой звезды 1987А прилетели нейтрино и оптические фотоны с обнажившегося ядра звезды. От звезды 1987А оптические фотоны прилетели на 3 часа позже нейтрино, что дало величину торможения (красное смещение спектра химэлементов звезды) фотонов от гравитации звезд по пути. На нейтрино с её сверхмалой массой гравитация звезд действует слабее.
Светимость сверхновой 1987А в оптическом диапазоне была на порядки ниже ожидаемого: основная светимость с сильным фиолетовым смешением спектра произошла на полгода раньше. Фотоны с фиолетовым смещением с передней полусферы разлетающейся оболочки сверхновой звезды 1987А, двигались с сверхсветовой скоростью, но в точке наблюдения на Земле не имели сверхсветовой скорости из-за многократных переизлучений от межзвездного газа, пыли.
Первичные сверхсветовые фотоны выбивают с атомов межзвездного газа, пыли, атмосферы Земли электроны внутренних околоядерных электронных оболочек ядер. После заполнения электронами этих оболочек переизлучается рентгеновский фотон движущийся с скоростью света. Импульс и энергия фотона при переизлучении не меняется. Процесс переизлучения идет в атмосфере звезд, Земли.
Скорость первичных фотонов вычисляют по сдвигу линий спектра излучения водорода, гелия оболочки сверхновой звезды. Излучение сверхновой звездой 1987А рентгеновских (для наблюдателя с Земли) фотонов произошло на несколько часов раньше оптических фотонов с обнажившегося ядра сверхновой 1987А. За счет разницы в скорости фотоны с разлетающейся с скоростью 40000км/сек оболочки звезды прилетели на Землю на полгода раньше
От взрыва сверхновой звезды 2006AG в 2006г сначала 35 минут шло мощное гамма-излучение (фотоны с сверхсветовой скоростью от передней полусферы разлетающейся оболочки сверхновой звезды). Затем через 3 дня телескопы увидели взрыв сверхновой 2006AG в оптическом спектре
Рентгеновское излучение газа падающего в черную дыру по эффекту Доплера превращается в инфракрасное излучение из-за:
1. из скорости света вычитается скорость источника излучения фотона
2. скорость фотона уменьшается от притяжения черной дыры
Часть первичных сверхсветовых фотонов сверхновой звезды не сталкивается с атомами межзвездной среды. Их скорость находят временем полёта между максимально удалёнными друг от друга автоматическими станциями с датчиками, часами абсолютного времени. Скорость групп первичных фотонов равна расстоянию между автоматическими станциями деленному на разницу времени фиксации пика излучения сверхновой звезды обоими станциями.
Отсутствие фиолетового смещения солнечного спектра с набегающей стороны Солнца антиэволюционисты приводят доказательством антизвездолетной Теории относительности. Красное смещение спектра дальних звезд христианские антиэволюционисты приводят доказательством теории единовременного как в религии, возникновения Вселенной в результате якобы «Большого взрыва».
1997г: астрофизик Джон Уэбб (John Webb ), его группа университета Нового Южного Уэльса в Сиднее проанализировали свет от далеких квазаров. В путешествии в 12млрд лет свет проходит через облака межзвездной пыли из металлов: магний, железо, никель, хром.
Исследователи обнаружили: у атомов этих металлов красное смещение линий спектра излучения (после поглощения фотонов света квазара) гораздо меньше предсказанного Теорией относительности. Опыт Уэбба на телескопе в Чили повторил подтвердил Джулиан Кинг.
В 1998г лженаучные Теорию относительности, Теорию Большого взрыва опроверг факт:
скорость разлета галактик растет на 50км/сек на каждый миллион парсек. Считалось: после Большого взрыва расширение Вселенной замедляется. Но по фактам притяжение звезд замедляет фотон. Чем больше замедлился фотон, тем дольше на него действует сила притяжения звезд. Величина замедления фотона растет.
50км/сек – измеренный приборами рост величины замедления фотона (красное смещение спектра элементов) от силы гравитации звезд. Христианские силовики упорствуют в защите антизвездолетной лженаучной Теории относительности чтоб не допустить перехода госвласти к инженерам.
Микроволновый фон Вселенной имеет одинаковую температуру, что доказывает – в крупных масштабах Вселенная стационарна. Это противоречит теории Большого взрыва. Антихристианская ревизия науки ликвидирует все теории подгоняющие науку под Евангелие.
Для измерения датчиком сверхсветовой скорости света от разлетающегося материала взорвавшейся сверхновой звезды, разместить на орбите 2 группы датчиков. Группа-1 датчиков на ближней околоземной орбите. Группа-2 датчиков на дальней околоземной орбите. Все датчики синхронизированы сверхточными часами с регистратором момента события. Регистраторы связаны между собой и Землей сетью космического интернета. Показания регистраторов определят сверхсветовую скорость фотонов от встречно летящего материала взорвавшейся сверхновой звезды.
Моя идея: расположенной на расстоянии миллиардов световых лет суперпустоты Эридана без звезд глубиной миллиард световых лет нет, объясняется прохождением фотонов звезд пустоты через область межзвездной газовой или газопылевой среды подтвердилась через 4 года в 2015г. Я первым в мире выдвинул это объяснение
49) (статье 7 раз вредило государство) Отправляем исследовательский спутник весом 100кг на звезду в радиусе 20 световых лет. По закону сохранения импульса m1v1=m2v2 для отправки спутника с разгоном до скорости света с последующим торможением до орбитальной скорости у звезды, надо на орбите Земли ракету с стартовой массой ~18000тонн.
m1 = стартовая масса топлива межзвездного спутника на орбите Земли ~18000тонн
v1 = 3,5км/с – скорость выхлопа химического ракетного двигателя
m2 = 100кг – масса спутника на орбите соседней звезды
v2 = 600000км/с – для упрощения расчета берем удвоенную скорость света – после разгона от орбитальной до скорости света идет торможение у звезды до орбитальной скорости. В обоих случаях разность скоростей равна примерно скорости света. Обе разности суммируем по модулю, получаем примерно удвоенную скорость света для упрощения расчета. Физически скорость света не превышается. Векторы ускорения спутника на 1-й и 2-й половине пути направлены противоположно.
По формуле закона сохранения импульса m1v1=m2v2 стартовая масса m1 межзвездной автоматической станции на орбите Земли ~18000т.
На практике стартовая масса межзвездного спутника будет ~35000 тонн с учетом бокового импульса выхлопных газов двигателей. За 20 век страны вывели на устойчивую орбиту ~23000т. Спутники отправит к звездам промышленность Луны
Теория относительности нарушает:
1. закон сохранения импульса: рост массы на околосветовых скоростях
2. закон сохранения массы: рост массы на околосветовых скоростях
3. закон сохранения энергии: рост массы на околосветовых скоростях
4. закон-3 Ньютона: рост массы на околосветовых скоростях
5. закон Доплера
6. закон сложения скоростей
7. закон постоянства времени
8. понятие «инерциальная система отсчета»: скорость якобы меняет одни законы физики из-за других – этому противоречат эксперименты с ускорителями частиц
9. принцип независимости системы координат от гравитационных полей
10. ввела «абсолютную скорость» без однозначного смысла. Слова, понятия в науке могут иметь только однозначный смысл.
11. разрушает смысл понятия «пространство». Пространство как абстрактное однородное математическое понятие не может иметь форму.
Баллистическая теория Ритца всё объясняет точнее, логичнее, не создает проблем законам физики: ritz-btr.narod.ru
Скорость света ограничивает только скорость излучения элементарных частиц относительно источника энергии излучения. Звездолет не элементарная частица, не берет энергию с внешнего источника, несет её в себе. При разгоне звездолета его масса уменьшается.
Потерю импульса звездолета по лженаучной Теории относительности якобы компенсирует рост его энергии по лженаучному «закону сохранения импульса – энергии», которому противоречат опыты (прямое измерение энергии ускоренных частиц) в ускорителях – христиане запретили о них упоминать в официальной научной литературе. Нет физических эффектов подтверждающих: скорость звездолета без участия внешнего поля превращает энергию в массу.
Доказательство лженаучности Теории относительности: эффект Мёссбауэра – сила гравитации ускоряет гамма-квант; факт роста частоты радиоволн спутников GPS на ~10Hz (эффект Доплера). Эти факты контрразведки христианских стран прячут цензурой, хотя факты могут проверить нехристианские страны, например Индия, Китай.
Наука и религия – взаимоуничтожающие противоположности. Для защиты Теории относительности (красное смещение спектра далеких звезд...) христиане создали лженаучные теории: Теорию «Большого взрыва», Теорию суперструн (больше 3-х координат пространства), Темную материю из которой якобы состоит 70% Вселенной
НЕТ ТЕМНОЙ МАТЕРИИ: звезды в галактиках удерживает не темная материя, а поворот силовых линий гравитации в стороны скопления звезд: масса притягивает силовые линии. Над плоскостью галактики гравитационные силы слабее, чем в плоскости вдоль рукавов. Поэтому изогнутая форма у газопылевых облаков над плоскостью спиральных галактик: спирали – силовые линии гравитации.
В начале 20 века христиане для создания, защиты (от колонизаторов Галактики) Мирового христианского правительства приняли решение закрыть человечеству путь в соседние звезды, с этой целью евгеникой Евангелия убить «лишние» миллиарды людей нехристианских наций в всем мире.
С этой целью христианские идеологи заказали масону Эйнштейну лженаучную (по толкованию формул, явлений) Теорию относительности чтоб убить стремление изобретателей нехристианских стран создать звездолет. Придет время нехристианские нации создадут галактические сверхдержавы.
Христиане создают Мировое христианское правительство чтоб заставить мир жить по единым для всех коммунистическим правилам Евангелия. Никому не дадут уйти на звездолете с Земли чтоб не вырвался из власти Мирового христианского правительства. Юрий Гагарин сделал человечество бессмертным, Мировое правительство снова сделает человечество смертным.
Цель антизвездолетной Теории относительности превратить Землю в всемирную тюрьму с которой никто не вырвется на соседние звезды. Пока вспышка на Солнце, астероид, соседняя сверхновая звезда в радиусе 10 световых лет или эпидемия не убьют человечество. Кроме Теории относительности нет другой научной теории, критика которой вызывала бы столько злобы силовиков христианских стран, приводила бы к таким тяжелым последствиям для ученых.
Космонавтика существует для сброса избыточного населения на планеты соседних звёзд, чтоб человечество не убило себя борьбой союзов стран за ресурсы планеты. Для всех народов Гагарин величайший символ человечества: не надо народам вечно убивать друг друга за экономический раздел Земли – делите Галактику, всем хватит – Земля территория мира.
2011г: Е.Б.Александров, П.А.Александров, В.С.Запасский, В.Н.Корчуганов, А.И.Стирин в Курчатовском институте провели опыт: электрон летя с почти световой скоростью попав в магнитное поле поворотных магнитов, излучает синхротронное излучение не превысившее скорость света. Электромагнитный импульс возник от резкого сжатия магнитного поля заряженной частицей. Источник электромагнитного импульса – сжимаемое электромагнитное поле, а не заряженная частица передавшая энергию полю. Магнитное поле поворотных магнитов как НЕПОДВИЖНЫЙ для наблюдателя (фотодиод) источник света не может излучать фотоны с сверхсветовой скоростью
ВЕРИФИКАЦИЯ ОФИЦИАЛЬНОЙ НАУЧНОЙ ТЕОРИИ (ЭКСПЕРИМЕНТА): фильтр лженауки – принцип гласности, конкуренции теорий и Всемирный интернет-парламент ведущих специалистов (поименно генераторов идей) мира. Голосуют только лица внесшие реальный научный (генерирование научных идей), а не менеджерский, финансовый вклад в данную науку.
Для утверждения новых научных теорий двух-трехпартийная система и ПОИМЕННОЕ (принцип гласности, личной ответственности) интернет-голосование за конкурирующие теории в науках через научные сайты (типа Википедии) обществ генераторов идей в науке.
На голосование 2-3 теории от 2-3 научных партий ученых. После голосования теория получившая наибольшее число голосов получает статус «официальная научная теория» – научная партия-1. Научная теория вторая по численности голосов получает статус «версия-2 научной теории» – научная партия-2. Научная теория третья по численности голосов получает статус «версия-3 научной теории» – научная партия-3.
У каждой научной партии свой официальный сайт, в котором партия доказывает научными фактами свою теорию природного явления. Право объединяться в единую организацию имеют только официальные первые научные партии. Остальным партиям это запрещено.
Если по статусу «официальная научная теория» голосовало мало специалистов – теория получает статус «бета-версия официальной теории (бета-версия официального подтверждения эксперимента)». В следующем голосовании при наличии кворума голосующих, статус теории (эксперимента) меняют на официальный или обнулят.
Вся информация о голосовавших – имена, личные голосующие решения с коментами должна быть легко доступна в интернете в реальном времени. Голосующие подписывают обязательство открыто предоставить человечеству имя, решения, коменты. Все голоса подсчитывают открыто поименно с полной информацией кто как голосовал.
При неполной информации голос не засчитывают, специалиста в течение 24ч уведомляют по телефону, электронной почте на языке его страны до получения ответа от него. Специалисты которым отказали в праве голоса имеют право через Всемирный научный интернет-Суд внести голос в итог голосования.
Науке необходимы перевыборы (можно по требованию ученого) через каждые ~10 лет научных теорий по принципу – какая с конкурирующих теорий лучше по фактам и логике (синий цвет удаленные государством слова)
50)
УЧЕНЫЕ В ЗАКОНЕ – АКАДЕМИКИ (статье 6 раз вредило государство) Разница между академиком и генератором идей в науке, как между жрецом религии (Евангелие) и высококвалифицированным рабочим (инженером) завода: 1-й – паразит, 2-й Создатель. В ЗАКОНЕ означает часть карательной системы госидеологии Евангелие.
Академия – институт ученых-инквизиторов с гослицензией на «истину» независимо от логических итогов профессионального спора, сравнения. При профессиональном сравнении или противостоянии людей надо сравнивать не статусы, титулы людей, а их результаты в данной теме.
У ученого нет вклада в науку если не сформулировать конкретными словами. Иерархию в науке, инженерии определяет личный вклад а не личные связи как в тюрьме. Науке, государству нужны рабочие науки – генераторы идей, а не жрецы науки – академики.
Российская академия наук РАН – институт научных инквизиторов с функцией блокировать госфинансирование неугодных классу силовиков ученых, инженеров, изобретателей, предпринимателей; не дать им печататься в профессиональных журналах, сайтах.
Академики получают 30 сребреников инквизиции за закон Библии – В ПОТЕ ЛИЦА ТВОЕГО БУДЕШЬ ЕСТЬ ХЛЕБ – чрезмерной узкоспециализацией, математизацией профессий навязывают гражданскому обществу максимум оплачиваемого труда для выжимания максимума налогов.
Смысл математики – борьба с трудом, создание методов упрощения, удешевления расчётов. Инквизиция Науки усложняет математику в вузах чтоб не было универсальных инженеров. Чтоб усложняя всё помочь силовикам агентурой обанкротить, национализировать частные предприятия, как силовики агентурой национализировали в Англии 1970-х фирму Роллс-ройс (авиадвигатели), в 1980-х фирму Ферранти (радары).
Ученые исследуют естественное. Технологии – искусственное от инженера. Технологии оценивают инженеры, высококвалифицированные рабочие, а не ученые. У РАН как организации ученых нет права оценки новых технологий. Это функция опроса взаимно независимых инженеров, рабочих лично создавших передовые технологии. По части вопросов больше доверять высококвалифицированным рабочим: у них больше практики, интуиции. Любые экспертизы надо привязывать не к организациям, а к опросам взаимно независимых, самых результативных специалистов.
Мировой рынок лучше государства определит иерархию профессионализма научно-технических специалистов. Надо отделить государство от системы определения иерархии профессионализма научно-технических специалистов.
Бюджет диссертационной системы на 95% направить в личные целевые банковские счета генераторов идей под их стопроцентный личный контроль. С личной уголовной ответственностью за нецелевую трату средств. Чтоб не воровали административные, экономические паразиты-посредники – госорганизации. Если генератор идей работает в частной фирме – ей 5% (или договорно) для преследования саботажа госзаказа.
Бюджетные деньги науки – генераторам идей. Остальные ученые примкнут (с оплатой труда) к генератору идей через научный сайт. Включая дистанционную (криптозащищенная интернет-линия) работу.
Госинститут академиков нарушает право профессионального равноправия граждан, их доступ к профконкуренции научно-технических специалистов. Титулы ученых, инженеров должны быть временными + пожизненная пенсия за норму профессионального вклада.
Академия наук – храм торговли преданностью, верностью госидеологии Евангелие. Функция Академии наук – защита от критики Теории относительности, Теории суперструн, Теории Большого взрыва, других лженаучных теорий созданных для служения науки интересам госидеологии Евангелие.
У христиан право выбора официальной научной теории, толкования фактов не у генераторов идей, а у силовиков. Христиане сделали физику самой идеологической наукой, заменяя лженаукой темы связанные с звездолетами или громадным выходом энергии, карая физиков увольнением за борьбу против антизвездолетных лженаук.
Наука христианских стран создана по образу и подобию инквизиции, заменяющей интеллектуальную конкуренцию преданностью и верностью единственно правильному учению. Отбор физиков – по преданности, верности (главные классовые ценности силовиков) госидеологии Евангелие.
Наука не рынок торговли учеными своей преданностью классовой идеологии силовиков. Нет в науке идеологии – изучали бы в вузах, опровергали бы слабые места. Наука не силовая структура – служит истине и интересам гражданского общества, а не интересам одного класса общества.
Конституция должна запретить Академии наук как госструктуру. Только как частная организация без госправ, без денег налогоплательщиков. Госстатус ученых определяется личным вкладом в науку.
Христиане превратив науку в госидеологию (однопартийная система науки) вырезали с Википедии важную для изобретателей статью «Критика трехкомпонентной теории цветного зрения» с перечнем научных фактов противоречащих трехцветной теории.
Проблема космических систем навигации – Теория относительности. В конце 1970-х КГБ отправил в дурдом крупнейшего изобретателя спутниковых навигационных систем, доктора технических наук физика Василия Петровича Селезнева за попытку напечатать в издательстве свою неполитическую научную книгу «К звездам быстрее света» (напечатана 1993г) с критикой лженаучной Теории относительности. В 1965г христианская инквизиция КГБ выпустила секретную инструкцию (секретный закон) отнимающую рабочее место у физиков за критику Теории относительности. (3 раза удалило государство)
Президиум Российской академии наук 3 раза принял постановления «О недопустимости критики Специальной теории относительности», запрещающие публикацию научных результатов противоречащих Специальной теории относительности.
Профессор Ленинградского политехнического института А.Денисов выпустил книгу «Мифы теории относительности» – хотели лишить учёных званий, выгнать с работы. Спасло избрание депутатом. ritz-btr.narod.ru
Академия наук Англии осудила теорию эволюции Чарльза Дарвина, отклонила изобретение молниеотвода Б.Франклином. Академии наук Германии, США объявили: аппараты тяжелее воздуха с неподвижными крыльями летать в принципе не могут. Российская академия наук объявила лженауками кибернетику, генетику.
В науке доказанный экспериментом факт стоит больше теорий физиков. Физики христианских стран требуют не публиковать в научных журналах научные факты (EmDrive) противоречащие существующим теориями (теории физики это гипотезы). Выгнать с рабочих мест физиков защищающих теории от фактов.
Тип мышления силовика: к «старым добрым временам» (к каменному веку), назад к корням (корень – наши предки обезьяны). Тип мышления ученого: моноидеизация, шаблонизация системы. Тип мышления инженера: изобретательство, колонизация галактики
51)
РАЗНИЦА МЕЖДУ ИНЖЕНЕРОМ И УЧЕНЫМ определяется целью профессии. Профессиональная цель инженеров – создать искусственный материальный или информационный объект, систему. Профессиональная цель ученых – объяснить естественное (существующее независимо от людей) моделями природных явлений. Ученые объясняют естественные (природные) явления в естественных, искусственных объектах.
Разница между инженером и ученым – разница между искусственным и естественным, между инженерией и наукой.
Атомные, термоядерные бомбы созданы инженерами, не учеными. Часть инженеров, создававших атомные, термоядерные бомбы были учеными работавшими инженерами.
Космические ракеты в чертежах создают инженеры, не ученые. Орбиту космических аппаратов вычисляют инженеры-математики. Софт космических аппаратов создают инженеры-программисты.
Искусственный интеллект как искусственный (весь код) информационный объект создают инженеры, не ученые.
Создают, эксплуатируют искусственную информационную и материально-техническую базу человечества инженеры, рабочие, не ученые. Технологии создают инженеры, не ученые. Ученые работают на научном оборудовании созданном инженерами.
Изобретатель, геноинженер – разновидности инженера, а не ученого. Геноинженерия на ~90% инженерия (искусственная составляющая), на ~10% наука.
В спорных случаях есть работа инженера и ученого одновременно. Разница в спорных случаях: сплав создан по заданным заказчиком цифровым характеристикам – создатель сплава инженер. Не по заказу с заданными цифрами – создатель сплава ученый.
Ученый не создает новое, а объясняет существующее, естественное. Ученый не будет менять госидеологию, подведет научную базу под Евангелие в управлении государством.
Класс ученых – класс политических проституток класса силовиков. Зарплату ученым платит не гражданское общество, а класс силовиков за научное обоснование идеологических интересов класса силовиков, половина которых противоположна интересам гражданского общества. В защите существующей госидеологии нет равных ученому: у силовиков в силу их системы отбора марионеток нет интеллекта как у ученого. У инженера интеллект есть, но он стремится к совершенству – нет настроения защищать несовершенное. Проще усовершенствовать.
Ученые лгут поддерживая экологический углеродный климатический грабёж государством гражданского общества – силовикам не хватает госбюджета (экологические и климатический налоги, штрафы, сборы) создавать паразитические рабочие места силовиков и госслужащих своим родственникам (надо запретить как в Сингапуре), секс-партнерам.
Не верь ученым на темы касающиеся гражданского общества. Пример лженаук созданных учеными для поддержки классовых интересов силовиков – современная Экономика, Теория относительности, Теория большого взрыва
Класс инженеров – самый системный класс. Класс ученых неорганизованный класс.
Признаки организованности класса общества:
1. надежный рыночный спрос на результаты работы
2. право собственности на средства производства
3. госвласть
52)
ФОРМУЛА 1 (F1): (статье 82 раза вредили) 1970-е: в гонках Свободной (нет антиинженерных ограничений) Формулы «Канада-Америка» изобретатель Джим Холл успешно конкурировал с заводскими (вдвое дороже F1) командами Porsche, Ferrari, изобретая: управляемое педалью антикрыло; вентилятор отсасывающий воздух под днищем машины + вакуумная юбка периметра днища. Гонки «Канада-Америка» (1967-72г) престижнее Формулы 1 (F1): 390км/ч машин Свободной формулы «Канада-Америка» на 50% быстрее F1; 100км/ч – 2,3сек на 26% быстрее; удельная мощность 1,967л.c./кг вдвое больше, мощность 1580л.с. – втрое больше машин F1.
Свободная Формула за 4 года дала F1 турбонаддув, управляемые антикрылья, спойлеры, вакуумные юбки + вентилятор отсасывающий воздух под днищем машины, колеса-вентиляторы (отсос воздуха под днищем через тормоза), сплавы титана.
Меньше ограничений конструкции – больше вероятность победы изобретателя, конструктора бедной команды над корпорациями: в изобретательстве, конструировании качество мозга невозможно в сложных вопросах заменить количеством мозгов, денег. По изобретательности вдохновению бедные команды обычно сильнее богатых команд.
Изобретателей задавили ограничением рабочего объема мотора (одноразовый высокооборотный 3л вместо б/у 7-8л): в ~10 раз выросли человеко-часы разработки мотора и коробки передач, расходы на повышенную точность изготовления из более дорогих материалов.
Автогонки F1 командный вид спорта: 80% команды – инженеры. Для демократизации, удешевления автоспорта не должно быть антиинженерных, антиизобретательских ограничений.
1985-86г: высшая форма автоспорта Свободная Формула ралли группа B5 престижнее F1: люди понимали B5 для реальных дорог. На Чернобыльскую катастрофу 1986г христианские спецслужбы Англии, Франции по принципу изначальной виновности человека ответили через Международную федерацию автоспорта FIA антиинженерными запретами – классовая борьба самого антисистемного класса (класс управляемого хаоса) – силовиков против самого системного класса – инженеров. FIA запретила группу B5 запланированным убийством экипажей: гонки в безлюдных горах.
Для окупаемости разработок, скорости эволюции группе B5 надо закрытую кольцевую трассу, кольцо от 4км, зрительские трибуны, трасса от 300км, ограничить занимаемую автомобилем площадь на трассе и объем топлива (запрет дозаправки). FIA множит число ограничений конструкции машин для исключения победы (качество мозга невозможно заменить количеством в сложных вопросах) изобретателя против корпораций. Больше ограничений – больше затрат команд на труд и средства контроля ограничений.
1968г Cooper: скорость уменьшала угол атаки антикрыла сжимая пружины. Lotus: монокок, передние антикрылья.
С 1976г спецслужбы Англии, Франции ввели в F1 принципы Евангелия:
1. максимум оплачиваемого труда по Библии – В ПОТЕ ЛИЦА ТВОЕГО БУДЕШЬ ЕСТЬ ХЛЕБ – нелюдь Бог прокляла всех людей вечным трудом в поте лица за 1-й (!!!) грех – съели яблоко
2. запрет изобретательства как уклонения от идеологии максимума оплачиваемого труда
3. максимум бессмысленности оплачиваемого труда инженеров по принципу изначальной виновности человека
4. принцип изначальной виновности человека запрещает рабу (инженеру) профессиональную уверенность в себе. Уверенность христиане ломают (ломают в инженере Создателя. Создатель в Евангелии – класс силовиков, инженеры всегда рабы) бесконечной частой сменой антиинженерных правил, законов
5. скрытое усиление вероятности отрицательного человеческого фактора с целью дискредитации человеческого фактора (профессиональное превосходство человека-Создателя над коллегами запрещено Евангелием) по христианскому принципу социального равенства: борьба против профессиональных талантов через рост непредсказуемости гонок чтоб лучший пилот, инженер не стали чемпионом профессии. Пример: двойное количество очков в последней гонке сезона, чрезмерное количество очков за первые 3 места направляют случайности против лучшего пилота, лучшего инженера. Пример: первые 10 машин стартуют на изношенных в квалификации шинах, остальные на новых.
Христианские контрразведки главных врагов ТРУДА – изобретателей лишают прав человека по обвинению в мании изобретательства чтоб прекратили уничтожать оплачиваемый труд. Изобретатели 200000 лет защитой от труда давали человеку жизненную энергию для интеллектуальной эволюции. Христиане пошлинами изобретателям за патенты на изобретения ликвидировали профессию изобретатель – антихристианская профессия.
Христианские контрразведки каждый день агентурой загоняют граждан в статус «виновный гражданин». Не признает человек принцип изначальной виновности человека – инквизиция применяет агентурный биохимический террор чтоб сильно ухудшить поведение человека, сделать виновным чтоб признал себя рабом с отказом от прав человека.
Гражданин блокирует это – его в черный список врагов Евангелия: уголовные провокации (загоняют в тюрьму), агентурный террор. 99,9% своего госбюджета контрразведки христианских стран тратят на скрытый карательный агентурный террор (поджоги, диверсии, убийства...) против граждан не выполняющих преступные принципы Евангелия.
«Ты (БОГАЧ) получил уже доброе твое в жизни твоей, а Лазарь (НИЩИЙ) – злое; ныне же он здесь (В РАЮ) утешается, а ты страдаешь (В АДУ)» – слова Христа. Его призывы к социальному равенству людей дали коммунистические революции инквизиции (контрразведки) в Франции, Венгрии, Германии, России.
Иудейские войны против Рима от разрушения Евангелием института частной собственности и предпринимательства повторили венгры 1956г, чехи и словаки 1968г, поляки 1989г, русские 1991г. Евангелие превратило в Ад жизнь миллиардов людей, включая сотен миллионов убитых коммунистической идеологией Евангелия в России, Венгрии, Чехословакии, Польше, Югославии, Германии, Монголии, Китае, Вьетнаме, Лаосе, Камбодже, Корее…
Равноправие усиливает сильных, ослабляет слабых. Равенство ослабляет сильных, усиливает слабых. Евангелие пропагандой социального равенства, бедности убило крупные страны Европы.
Экономическая, военная, политическая безопасность страны основаны на балансе прав всех классов общества. Евангелие рушит баланс экономической, идеологической диктатурой класса силовиков. По Евангелию силовики – класс рабовладельцев, граждане – рабы.
Социальное равенство в F1 – увеличение интриги (вместо таланта случайность как в лотерее) в гонках. Социальное равенство объединяет силовиков, бедных, глупых граждан против богатых, умных; против предпринимателей, интеллигенции.
Социальное равенство запрещает людей высокого интеллекта в управлении государством. Социальным равенством – диктатурой дураков – христиане уравнивают влияние всех людей на ход Истории чтоб остановить технический прогресс, Эволюцию. Социальным равенством христианские страны создают непреодолимые препятствия умным, дураков усиливают поднимают в власть. Социальное равенство – вредительство тысячами секретных инструкций против умных, суперменов.
Самый демократичный чемпионат F1 – последний год «турбонаддув + граунд-эффект» – 1982г, победы 11 пилотов 7 команд. Скоро моральные людоеды в машину победителя гонки F1 станут ставить груз 50кг чтоб не дать лучшему пилоту, лучшему инженеру стать чемпионами профессии: моральное людоедство христиан.
Немецкие корпорации вкладывая миллионы в гонки DTM имеют ПРАВО на победу команды. ПРАВО отняло Евангелие – социальное равенство: в машину победителя груз 50кг – штраф за победу – не дать лучшему пилоту, лучшему инженеру DTM стать чемпионами профессии – профессиональную гордыню Создателя запретило Евангелие.
Немцы в рабстве у Моисея и Христа к которым добавляют Магомета – Евросоюзу выгоден терроризм иммигрантов-мусульман – рост финансирования силовиков.
Социальное равенство уничтожает положительный человеческий фактор, усиливая отрицательный человеческий фактор – изначальная с рождения виновность человека по Христу. Правила FIA уничтожают положительный человеческий фактор (таланты гении), усиливая власть силовиков, денег.
Никто кроме христианских силовиков не уничтожает человеческий фактор: успех бизнеса держится на человеческом факторе. Христианские силовики усиливают отрицательный человеческий фактор, подавляют положительный человеческий фактор уничтожая роль личности в истории, сводя всё к коммунистической идеологии Христа.
Евангелие запрещает государству быть обязанным человеку. Обязанность государства человеку превысила христианский предел – государство начинает агентурный террор против человека. Им нужно чтоб все решал не человеческий фактор, а идеология Христа. Христианские силовики владеющие F1 вкладывают не как в бизнес, а как в инструмент пропаганды Христа.
Нельзя христианам доверять Чемпионаты мира: 1970-х христиане отнимали титул чемпиона мира у малоизвестных вольных борцов, запретив изобретенные (интеллект запрещен социальным равенством рабов) ими суперприемы
МОТОР: без антиинженерных ограничений команды выбросили бы коробку передач, все цилиндры кроме одного, другие элементы автомобиля снижая вес, потери мощности. Это бы упростило удешевило автомобиль, автоспорт.
Христианам нужен максимум оплачиваемого труда, налогов – ограничениями делают автоспорт сверхдорогим – блокируют копирование производителями технологий упрощающих удешевляющих автомобиль.
FIA запретила турбонаддув, аэродинамические юбки, непоршневые моторы. Запретили низкооборотные моторы большого рабочего объёма: слишком мал износ, в адиабатной
(воздушное охлаждение мотора обратной связью с датчиками температуры, компрессор-воздушное охлаждение днища поршня по каналам «коленвал – шатун – поршневой палец – каналы поршня»)
одноцилиндровой версии с роликоподшипниками (трубчатые упругие ролики) коленвала, распредвала тратят топлива на 30% меньше высокооборотных моторов не требуя коробку передач – невыгодно производителям топлива, моторов, коробок передач.
FIA запретив сборный коленвал мотора остановила разработки коленвала бедными командами. Это отняло возможность поднять КПД мотора выравнивая до 320°C температуру днища поршней охлажденным в радиаторе воздухом (с турбокомпрессора) через внутренние каналы «коленвал – шатун – поршневой палец – каналы поршня». Сборный коленвал дает шатуны без болтов – шатун легче на 20%.
1904г: мотоциклы Свободной Формулы «Мотоцикл до 50кг»: рабочий объем (1,5л мотоцикл «Пежо») не ограничен.
1906г: Свободная Формула «До 1000кг»: рабочий объем (19л) мотора не ограничен.
1907г: Свободная Формула «Расход топлива 30л на 100км»: количество топлива в баке не ограничено – после гонки проверка сколько потрачено. Господство автомобилей с рабочим объемом 12-15л.
1914г: спецслужбы Франции ограничили рабочие объемы моторов авто-мотоспорта для уменьшения срока службы автомобилей, мотоциклов (ростом производства выжать максимум налогов) и идиотизации (узкой специализацией) класса инженеров – конкурента класса силовиков в управлении государством (государство – аппарат насилия в лице класса силовиков).
Результат – сверхдорогие высокооборотные многоцилиндровые моторы. Из-за французов в автомобилях 25% топлива не сгорев улетает в выхлопную трубу – обороты > 1000об/мин – топливо не может полностью сгорать так быстро.
Ядовитая переработка тонн руды дает граммы редкоземельных металлов для каталитического нейтрализатора дожигающего эти 25%. Обороты высоки от больших налогов на низкооборотные моторы большого рабочего объема от жадности христианских силовиков. Они криками об экологии выбивают максимум налогов, штрафов, сборов чтоб создать паразитические рабочие места госслужащих, силовиков для родственников и секс-партнеров силовиков. Силовики размножаются быстрее гражданского общества – налоги будут расти, экологии будет всё хуже и хуже под крики силовиков о защите экологии новыми законами, налогами, штрафами, сборами.
1930-34г: мировой экономический кризис вернул (правила дорого выполнять, контролировать) Свободную Формулу.
1934-37г: Свободная Формула «Вес машины до 750кг» заменила сверхдорогие многотонные неэкономичные машины в разы более дешевыми экономичными 6-литровыми (без наддува 320км/ч) машинами.
1938г: спецслужбы Франции ликвидировали Свободную Формулу «Вес машины до 750кг» – господство многотонных сверхдорогих автомобилей.
Кто дружит с физикой понимает: без антиинженерных ограничений одноцилиндровый мотор большого рабочего объема с импульсным турбонаддувом низкого давления мощней, компактнее, экономичнее многоцилиндровых при равном весе.
У одноцилиндрового двигателя:
1. меньше потери давления на участке между выпускными клапанами и выхлопной трубой. Мощность это разность давлений умножить на расход газа
2. меньше поверхности трения, теплообмена
3. меньше пар трения
4. меньше затраты мощности на систему охлаждения
5. меньше поверхности трения воздуха в впускном и газа в выпускном патрубке
6. меньше зависит от мощности оптимальный зазор «поршень – цилиндр»
7. меньше влияние точности изготовления, износа, упругих деформаций, температурных расширений и теплоемкости мотора на его работу
8. меньше объем (больше скорость газа в турбине) газа между выпускными клапанами и турбиной в импульсном турбонаддуве
9. меньше неравномерность крутящего момента от роста сил трения при изменении оборотов
10. больше полнота сгорания топлива за счет меньших оборотов и поверхности теплообмена
Способы защиты днища поршня от перегрева:
1. воздухом охлажденным в радиаторе воздухом (с турбокомпрессора) через внутренние каналы «коленвал – шатун – поршневой палец – каналы поршня»
2. впрыск масла снизу на днище поршня
3. вдув соплом воздуха снизу на днище поршня в двухклапанной системе вентиляции картера двигателя
Рост времени реакции на педаль газа одноцилиндрового мотора (большой маховик) компенсируют сверхнизкие рабочие обороты: многоцилиндровые моторы столько времени набирают сверхвысокие обороты.
По законам физики идеальный поршневой мотор: 1 цилиндр большого рабочего объема + турбонаддув низкого давления + 2 коленвала встречного (через косозубые шестерни) вращения в роликоподшипниках и 2 шатуна (в роликоподшипниках) на 1 поршень. Ресурс роликоподшипников увеличивают упругими, трубчатыми роликами: составные антирезонансные ролики из 2-х взаимно запрессованных роликов
Схема «2 коленвала, 2 шатуна на 1 поршень» дает:
1. нет бокового трения и износа поршня, цилиндра. КПД, мощность мотора выше на 12%, расход топлива меньше на 12%. Вес и размеры системы охлаждения многократно меньше при равной мощности
2. одноцилиндровый мотор уравновешен лучше 8-цилиндрового, если вес шатунов с поршнем равен весу противовесов коленвала, диаметр поршня вдвое больше хода.
Рабочий объем одноцилиндрового мотора максимален для адиабатного цикла (КПД=52%): горячее (камера сгорания, поршень адиабатного мотора равномерно нагреты 320°C) мотор – меньше его ресурс – компенсируют снижением оборотов через рост рабочего объема.
Для роста рабочего объема мотора без роста размеров, для роста длины факельной струи камеры сгорания идеален сверхкороткоходный нижнеклапанный (компактнее) форкамерно-факельный (инжектор управляет моментом коленвала) адиабатный мотор с воздушным охлаждением. Форкамерно-факельный мотор имеет широкий диапазон управления моментом при постоянных оборотах и КПД, делая коробку передач ненужной.
Чем больше обороты, тем больший процент бензина станет нагаром, сажей. Сверхвысокий градиент температуры топлива от высоких оборотов дает канцерогенные частицы пирографита. Он медленно горит – проблему решает низкооборотный адиабатный двигатель.
Турбокомпрессор низкого давления нагнетает воздух в камеру сгорания через закрытые полости цилиндра и головки, охладив их возвращает теплоэнергию в цикл. Запуск холодного мотора: воздух идет вне рубашки охлаждения. Мотор имеет высокую габаритную мощность.
Колеблющийся от одноцилиндрового мотора момент задних колес заменяет противобуксовочную систему: человек спиной чувствуя колебания момента ведущих колес, точнее управляет педалью газа, уменьшая износ шин.
Причина упорства христиан в росте числа цилиндров – чем больше цилиндров, тем меньше момент коленвала, тем больше число ступеней коробки передач и цена автомобиля, тем больше силовики выбьют налогов с гражданского общества. Цилиндров в моторе, ступеней в коробке передач должно хватать для оплаты налогами паразитических рабочих мест госслужащих и силовиков для родственников и секс-партнеров силовиков.
Ограничения рабочего объема, конструкции мотора F1 удорожало его до $200000.
2014г F1: разрешили турбогенератор на выхлопных газах. Инженеры вывели бы 100% мощности (мощность = разность давлений газа умножить на его расход) в турбогенератор (электромоторы задних колес), сделав поршневой мотор камерой сгорания без полезного крутящего момента. Эта схема дает в колеса 1500л.с. (с турбонаддувом) в прямых участках трассы без превышения расхода топлива за гонку. Христиане убили эту схему ограничением мгновенного расхода топлива 100кг/час.
Газотурбинный мотор уменьшил бы в F1 расходы за сезон на 70% за счет высокой долговечности газовых турбин, отсутствия водяной системы охлаждения.
2014г: ограничение мгновенного расхода топлива отняло 2-е место в гонке у Даниеля Риккардо (дисквалификация, Red Bull). Ультразвуковой датчик (на биениях эффекта Доплера с опорной частотой) мгновенного расхода топлива команды обязаны купить у FIA. Ограничение мгновенного расхода топлива – война христианских силовиков против изобретателей. Для христиан враг изобретатели – уменьшают сбор налогов уничтожая лишний оплачиваемый труд.
Топливо охлаждают при заправке до плюс 10°C. В 1980-х минус -30°C (до -53°C): в бак входило на 13% больше топлива.
2000г Сан-Паулу: дисквалифицированы Девид Култхард, машина: торцевая пластина переднего антикрыла в 43мм от плоскости днища вместо 50мм.
2008г: корпорации вместе с германскими спецслужбами начали войну против английских спецслужб из-за запрета президентом FIA Максом Мосли активной подвески, антиблокировочной и противобуксовочной систем, всей электроники – фашистское видео 2008г с Максом Мосли. Несмотря на требования всех команд Мосли не ушел в отставку. В ответ 2009г убили его сына, заставив уйти в отставку. После этого FIA осторожнее с корпорациями что усилило Мерседес, Феррари
СИСТЕМА ОХЛАЖДЕНИЯ: добавка в воду радиатора мотора 0,002% полиэтиленоксида уменьшает вязкость воды: насос отнимает втрое меньше мощности мотора F1.
1996г: площадь радиаторов моторов V10 на 10% меньше чем у V12.
2019г: в моторах F1 для уменьшения площади радиаторов температура воды 125°C
Инженеры F1 создали паротурбинную систему охлаждения с конденсатором пара. После блока цилиндров теплоноситель испарившись крутил паротурбину водяного насоса мотора: не нужно 3% мощности насосу: рост мощности на 3%, расход топлива ниже на 3%.
Давление теплоносителя стабилизирует (защита от паровых пузырей) перепускной клапан-Р (сброс пара в конденсатор) с отрицательной обратной связью с датчиком давления жидкого теплоносителя блока цилиндров + электронасос (на валу паротурбины) запуска мотора. Конденсатор не охлаждал без вентилятора вращаемого турбиной выхлопной трубы – FIA запретила вентиляторы мотора автомобиля.
Паротурбинная (перегрев пара в выхлопной трубе автомобиля) система охлаждения с клапаном (управляет газовым сопротивлением паротурбины) повысит мощность автомобиля на 15%, снизит расход топлива на 15-20%. Ограничением давления воды 3,75атм христиане убрали с гонок паротурбину.
2014г: разрешили турбонаддув. Чтоб команды не выкинули ненужный (уменьшает КПД) интеркулер ограничили рабочий объем 1,6л с целью поднять расходы на моторы: изгнание бедных команд. Без ограничения рабочего объема команды увеличили бы рабочий объем мотора до 20л: такой мотор долговечен, не требует коробки передач.
Без интеркулера, коробки передач выше КПД автомобиля. Команды для КПД обдували бы радиатор сжатого турбокомпрессором воздуха выхлопными газами как в танковых газотурбинных двигателях.
В правильном поршневом моторе воздух после циклон-фильтра идет через закрытую рубашку воздушного охлаждения в камеру сгорания. Для роста КПД надо греть воздух для мотора: двигая вверх среднюю температуру такта расширения газов увеличиваем разность давлений «выпускные клапана – атмосфера» для турбины.
Запрет паротурбинного охлаждения + ограничили мощность, время рекуперации энергии – силовики боятся: рекуператор энергии отправит на свалку эволюции поршневой мотор, сцепление, коробку передач, рычажки, кнопки руля...
Их заменит запаянный снаружи стартер-генераторный кольцевой (бублик) вакуумный супермаховик (магнитный подвес с дублирующими роликоподшипниками с упругими трубчатыми роликами) с выводом момента проводами, электромоторами в колеса: шанс изобретателям бедных команд.
2014г: запрет выхлопных труб между блоками цилиндров чтоб удвоить массу выхлопной систему из жаропрочной стали (невыгодно бедным командам), не дать применить импульсные (выше КПД, меньше турбояма) турбины, провоцирующие инженеров уменьшать число цилиндров (невыгодно богатым командам, корпорациям) турбомоторов – стремление FIA к максимуму оплачиваемого труда.
FIA запретила механизм изменения фаз газораспределения. FIA для изгнания бедных команд запретила керамическое покрытие днища поршня чтоб уменьшить ресурс мотора. FIA ограничила доработки мотора для изгнания бедных команд: у них хуже диагностическое оборудование, дольше решают технические проблемы.
Христиане ограничением доработки мотора увеличили необходимое для разработки мотора количество инженеров и денег чтоб отнять победу у универсальных инженеров. Корпорациям из-за иерархии, узкой специализации инженеров невыгодна многофункциональная (проблемы разработки истребителя F-35) техника: требует универсальных (снижение веса автомобиля, многоканальное сопряжение систем, протоколы взаимодействия систем…) инженеров, чем сильны бедные команды с их неограниченными правами инженеров. Крупные корпорации неспособны решать запутанные технические проблемы из-за узкой специализации инженеров, отсутствия у них прав.
Конкуренция команд – конкуренция Единой логики (высокий риск: всё или ничего) универсального конструктора бедной команды против Единого плана (ответственность, риск запрещен) богатой команды.
Для борьбы с универсальными конструкторами спецслужбы Англии, Франции втрое увеличили минимальную массу автомобиля F1 – катастрофа бедных команд. Ограничений минимальной массы автомобиля не должно быть: достаточно обязательных стендовых испытаний автомобиля, электрооборудования.
Ограничить надо максимальную сухую массу автомобиля без пилота и объем бензобака чтоб убрать затраты на бесполезную для общества аэродинамику машин. Нет ограничения минимального веса – из-за ограничения прав инженеров корпорации начнут проигрывать изобретательным бедным командам.
Христиане организовали рэкет команд принудительной системой СЕРТИФИЦИРОВАННЫЕ ПОСТАВЩИКИ деталей автомобилей. Команды сделали бы эти детали 5-10 раз дешевле, но христиане воюют против бедных команд также, как инквизиция столетиями тайно убивала детей бедных семей, инсценируя самоубийство (не мешай евгенике Евангелия) врачей заставлявших акушеров стерилизовать руки. Крестовый поход бедных детей Европы – продали в рабство мусульманам.
Европа голодала – Евангелие организовывало религиозные войны, публично сжигая, непублично убивая «лишних» граждан убила 60млн европейцев. В почти бесплодных горных странах Юго-Восточной Азии вопрос голода решала частная инициатива: террасное земледелие; ели собак, летучих мышей, крыс, змей, насекомых – плотность населения в разы выше, чем в богатой водными, продовольственными ресурсами Европе.
1980-е: FIA запретила турбонаддув, несмотря на рост от турбонаддува КПД мотора, подготовку перехода автомобилестроения к многотопливному газотурбинному мотору: он закроет половину нефтеперерабатывающей промышленности, перевозки для нее. Экологии, военной безопасности стран важны не расход топлива автомобилями, а расход топлива страной
1990-е: FIA запретила гибридные силовые установки – реакция христианского силовика – уничтожить любую случайность на пути богатых налогоплательщиков к победе. Христиане от стремления к иерархии враждебны к бедным претендентам на победу. Бог Библии злобная нелюдь проклявшая людей, убившая в Библии миллионы людей – общение с ним безопасно только через платного священника. Большая дистанция общения с самым кровавым Богом увеличивает число ступеней христианской иерархии. Христианские страны самые иерархические, самые идеологизированные.
F1 – самый христианский поэтому самый антидемократичный вид спорта в котором война христиан против бедных команд, против талантов не прекращается никогда. FIA без объяснений запретила индийской команде рекуператор «маховик + вариатор»
КОРОБКА ПЕРЕДАЧ: силовики Англии, Франции обязательной в F1 8-ступенчатой коробки передач внушают идеи «прогресса» для роста оплачиваемого труда промышленности. Хотят внушить обществу потребность 12-цилиндровых автомобилях с 9-ступенчатыми коробками передач. Коробка передач съедает 10-15% (зависит от числа переключений на 1км) крутящего момента, мощности, топлива.
Дешевле увеличить рабочий объем мотора + форкамерно-факельным зажиганием дозировать подачей топлива крутящий момент. Количество свеч форкамер пропорционально площади поршня. На частичных нагрузках фаза выпуска газов короче: в такте сжатия остаются выхлопные газы. Форкамерно-факельный мотор имеет широкий диапазон управления моментом при постоянных оборотах и КПД, делая коробку передач ненужной.
Рабочий объем мотора с принципа: максимальный крутящий момент коленвала равен максимальному в эксплуатации автомобиля. При 5000Н/м в задних колесах автомобиля F1 чтоб выбросив коробку передач облегчить автомобиль, нужен сверхкороткоходный одноцилиндровый мотор воздушного охлаждения с рабочим объемом 20л, 2400об/мин – меньше обороты – легче (центробежная сила) мотор при равной мощности – меньше сила клапанных пружин – выше КПД автомобиля.
Вариант-2: вместо вместо коробки передач большой маховик, периодически кратковременно раскручиваемый мотором. Мощность на колеса снимает с большого маховика транзисторная муфта сцепления.
2004г: чтоб инженеры инерцией коленвала, ходом поршня не увеличили момент мотора (290Н/м при 5000Н/м в задних колесах) для удешевления коробки передач, силовики Англии, Франции запретили отклонение центра масс коленвала > 5см.
2014г: запрет аккумулятора весом < 20кг
2015г: суперкар Koenigsegg Regera: до 250км/ч разгон электромоторами, затем гидромуфтой: потери энергии вдвое меньше коробки передач: разгон до 400км/ч в разы быстрее Бугатти. По слуху абсолютный рекорд без коробки передач в самой престижной трассе Нюрбургринг спецслужбы Германии защищая фирму ZF, принудили владельца трассы запретить заезды Koenigsegg (другим фирмам не запретил). Нет коробки в дрегстерах.
Надо запретить внешний стартер для эволюции декомпрессионного механизма (как в автомобилях начала 20 века): запуск одноцилиндрового мотора маховик-стартером (10 раз легче обычного) как в самолетах
ГРАУНД-ЭФФЕКТ в разы снизил расходы (датчики вакуума под днищем вместо аэродинамической трубы) на аэродинамику: переднее крыло удалили ведущие команды, двухмерный поток воздуха предсказуем, заднее крыло меньше: в разы меньше мощность завихрений сзади машины: безопаснее обгоны, на 10% меньше расход топлива за сезон, в разы дешевле автомобили.
1978г: Харви Постлтуэйт с Wolf изобрел подвижные юбки в направляющих.
Для защиты вакуума под днищем автомобиля от неровностей асфальта надо разрешить только рычажную (направляющие боятся грязи) подвеску юбки в параллелограммных продольных рычагах, требовать с каждого бока автомобиля 4 сегмента (внахлестку) юбки с независимой подвеской сегментов на общей раме юбки, требовать сигнализацию в шлема пилота, меняющей громкость по цифре вакуума.
ГРАУНД-ЭФФЕКТ (днище в форме крыла): F1 стала объектом яркого интереса любителей техники, журналистов (картинки автомобиль-крыло журналов 1970-х). Технику вызывающую яркие положительные эмоции в обществе христианские силовики сочли нарушением заповеди-2 Библии: нельзя ничего и никого любить кроме природы (экологии).
Силовики Англии, Франции решив убрать граунд-эффект наткнулись на сопротивление всех команд F1: бойкот FIA, этапа гонок: Война FISA-FOCA. FIA не признало СТОПРОЦЕНТНО общие интересы всех команд: символ наукоемкости F1 граунд-эффект запрещен
С 1981г для ликвидации граунд-эффекта FIA многократно увеличивала минимальную массу автомобилей: с 500кг до 798кг (без топлива, пилота), заставив команды > 50% всех денег тратить на бесполезные обществу виды аэродинамики. Сухую массу автомобиля без пилота надо не > 150кг
FIA умышленно не ограничивает скорость ограничением сухой массы автомобиля, объема топлива, запретом дозаправок: классовый интерес силовиков сделать людей виновными чтоб качать права. В спорте не должно быть силовиков: всё определят голосованием равноправные непосредственные участники соревнований, а не силовики. Судей назначать с вышедших в отставку инженеров. Судьи не должны получать деньги за работу (финансовый канал спецслужб, корпораций).
Качая новые права для рэкета (прокорм силовиков) команд, FIA изобретает новые регламенты: к техническому регламенту добавили спортивный, финансовый. С незаконно запрещенного автомобиля Lotus 88 FIA ссылается на моральный регламент – нарушение духа F1.
За неисполнение духа церкви силовики сжигали людей. За неисполнение духа FIA эти же христианские нации дисквалифицировали самую сильную в инженерии команду Lotus, целенаправленно банкротили правилами FIA. Дух FIA – религиозное, не юридическое понятие: после Суда FIA выплатит компенсацию за финансовый (ушли спонсоры), моральный (репутация команды) ущерб.
Дух регламента F1 для FIA: отказ от изобретательства под идиотским обвинением: команда извлекает пользу! Для чего тогда команды на 80% из инженеров? Свою пользу запрещают рабам: у христиан инженеры – каста рабов.
У рабов по учебнику рабовладельцев Евангелие:
1. социальное равенство рабов
2. запрет на сильное профессиональное превосходство человека-Создателя (инженер, изобретатель, программист...)
3. запрет на иерархию у рабов
4. запрет рабам эксплуатации человека
5. запрет частной собственности, предпринимательства
6. запрет на личные интересы, цели
Силовик – носитель профессиональной власти, карающей нарушителей законов, инструкций, правил. FIA – организация спортивных силовиков. FIA скрыто управляют силовики спецслужб Англии, Франции. Они по христианскому принципу изначальной виновности человека правилами F1 максимально принуждают команды стучать друг на друга.
Формула от силовиков: нет пользы обществу от инженеров, инженеры это уголовники. Формулы от силовиков выражают классовое противостояние силовиков против инженеров. Цель силовиков – борьба за влияние в обществе – не дать обществу использовать идеи инженеров. Все правила FIA направлены на рост зарплаты, власти силовиков FIA через удорожание автогонок. F1 – театр христианской тюрьмы: заключенные – инженеры-преступники
Свободная формула: максимум пользы инженеров для общества.
Признак формулы от силовиков – слово «федерация» означает:
1. нет ограничителей стремления силовиков к росту вертикальной иерархии
2. интересы, влияние силовиков сильнее интересов, влияния остальных классов общества
Спортивная федерация – иерархическая рабовладельческая структура, верхняя ступень иерархии которой присвоила себе статус Бога спорта, не признает у спортсменов и спортивных команд неоспоримых прав: у рабов божьих не может быть прав защиты от Бога спорта. Спортивная федерация имеет право запретить своим рабам всё, что сочтёт нужным, независимо от мнений спортсменов, спортивных команд. Спортивная организация превращается в бюрократическую рабовладельческую организацию после перехода контроля над ней к государству или корпорации – цель деньги и власть над рынком, а не служение принципам спорта. Государство опаснее для спорта: принципы спорта заменяет принципами госидеологии.
Христианские силовики:
1. экозаконами максимально усложняют конструкцию автомобилей для изгнания с мирового рынка малых и средних фирм, монополизации секторов мирового рынка крупными корпорациями для максимума налогов с общества.
2. бесконечно меняют экозаконы чтоб финансово вынудить производителей экономить на сроке службы, равнопрочности автомобилей для выжимания с общества максимума налогов – максимум техобслуживания и потребления товаров
Силовик всегда на стороне богатых. Спортивных силовиков в международном спорте не должно быть
Христиане создают правила F1 по принципам:
1. F1 должна тратить максимум ресурсов с нулевой пользой для серийных автомобилей, для общества по принципу изначальной виновности человека (инженера)
2. на создание одного автомобиля F1 должно ежегодно уходить не меньше четверти цены атомной подлодки чтоб у спортивных силовиков была большая зарплата
3. техобслуживание автомобилей F1 должно быть сверхдорогим чтоб у спортивных силовиков была большая зарплата
Пункты-2-3 ввел Берни Экклстоун превратив F1 в принадлежащий ему многомиллиардный бизнес.
Признаки вмешательства христиан в работу спортивных, других организаций:
1. под лозунгом толерантности смешивают противоположности (управляемый хаос), пресекая противодействие. Пример: спорт смешивают с его противоположностью лотереей, науку смешивают с её противоположностью религией, натравляя одну половину людей организации на другую (всё что не от Бога будет искоренено – слова Христа)
2. усиливают роль денег, лицензий в организациях
3. разрушают работу организаций лозунгами «экологических», «моральных», «спортивных»… христианских «ценностей»
Необъяснимые интересами общества запреты христиан:
1. в велоспорте запретили дисковые тормоза: социальное равенство
2. в единоборствах запретили изобретенные спортсменами новые эффективные приемы не нарушающие правила: социальное равенство
3. запрет жима у штангистов
4. у спортивных лучников в центре лука рейка с прицелом на конце. 2-й прицел у ладони запретили
5. мельдоний для спортсменов чтоб налогоплательщики не платили лечение сердечно-сосудистой системы спортсменов ушедших с спорта: у них до 50% мышц сердца не работает из-за разрывов кровеносных сосудов сердца от тренировок, соревнований. Мельдоний спасает сердце. Запретом мельдония христиане заставляют спортсменов жертвовать здоровьем для всемирного торжества принципа изначальной виновности человека
Запрет граунд-эффекта: запрет юбок: в торможении, поворотах от трения направляющих юбки не успевали опуститься: автомобиль не прижимало к трассе, вылетал.
Неподвижные юбки теряли малый зазор с трассой в торможении и поворотах, переход на сверхжесткую подвеску ухудшил самочувствие пилота. Проблему прижима в торможении и поворотах решил Колин Чепмен в Lotus 88: ЖЕСТКИЕ ДОПОЛНИТЕЛЬНЫЕ ПРУЖИНЫ (подрессоренные бока кузова) прижимали подвижные бока кузова с внутренними аэродинамическими профилями к трассе рычагами мягкой подвески автомобиля: запретила FIA.
FIA запретила отсос воздуха под днищем, надо было требовать очистку воздуха после вентилятора от камешков.
FIA запретила выхлопную трубу в заднем диффузоре автомобиля F1: надо было требовать постоянную силу прижима независимо от нагрузки мотора.
1970-е: автомобили F1 красивы: высокий (чище воздух для мотора, открыто заднее антикрыло) воздухозаборник над головой пилота, сверхширокие шины большого диаметра сзади как мощные бедра высокой атлетичной самки. 1970-е, начало 1980-х: задние колеса большого диаметра (больше ресурс. хороши в дождь), ширина шин Michelin 68см
1980-е: запрет шин большого диаметра, широких шин: меньше ресурс – больше прибыль шинных фирм.
1976г: по заповеди-2 (нельзя любить автомобиль) Библии силовики Англии, Франции запретили воздухозаборник над пилотом: машины стали уродливы из-за боковых воздухозаборников – закрыли заднее антикрыло. Воздухозаборник над головой запретили чтоб резиновая крошка, пыль с колес снизили ресурс моторов – изгнание бедных команд. Сегодня запрет воздухозаборников выше 0,95м от асфальта.
1994г: FIA заставили делать дыру сзади воздухозаборника у головы чтоб не было пользы мотору от встречного потока воздуха.
1994г: самая сильная в инженерии команда Lotus обанкротилась от цели FIA сделать F1 клубом мультимиллионеров – больше зарплата спортивных силовиков.
2010г: возрожденный Lotus создал противоклевковую систему автомобиля в торможении. 2011г: испытывал в тестах: законность подтвердила FIA.
2012г: FIA запретило Lotus противоклевковую систему, в 2020г разрешили Мерседесу.
Запрет (ровное днище) задних, передних (сопла сбоку, сверху) диффузоров днища автомобиля привел к уродливым носам, невозможности обгона в быстрых поворотах. Офицеры спецслужб Англии, Франции за деньги налогоплательщиков напрягаются с последних сил чтоб правилами сделать уродливее автомобили F1 – заповедь-2 Библии – нельзя никого и ничего любить – нельзя любить автомобиль!
Эпоха ГРАУНД-ЭФФЕКТ + ТУРБОНАДДУВ увеличила нагрузки, износ, нелинейность работы тормозов. Инженеры увеличили точность дозировки силы тормозов (линейность работы), ресурс тормозов добавив 2-й суппорт с другого конца диска. Производители тормозов для роста цены тормозов добились запрета 2-го суппорта диска тормоза
ЗАЩИТА ОТ КОЛЕСА-УБИЙЦЫ:
1. закрыть колеса кузовом (больше рекламы спонсоров)
2. подвеска колес на продольных рычагах: передняя подвеска на 2 продольных рычагах с осями параллельными оси колеса, задняя подвеска на одном продольном рычаге с осью параллельной оси колеса. Параллельность осей уменьшает момент инерции неподрессоренных масс, расход топлива и шин, требует стабилизатор поперечной устойчивости. Подвеска на продольных рычагах – лучшая подвеска для любого автомобиля, танка…
3. трехдисковые тормоза
4. тормозное усилие симметрично диаметру диска: 2 диаметрально симметрично противостоящих суппорта диска тормоза.
FIA запретила защиту от колеса-убийцы: только 1 диск и 1 суппорт, закрыть колеса кузовом запрещено. Ступицу колеса 2 обязательных троса (D=0,8см) крепят к подвеске и шасси автомобиля: колеса закрытые крыльями в 10 раз дешевле, в 100 раз безопаснее: 2001г Мельбурн, BAR Honda: лопнули тросы: колесо убило судью
ТРЕХДИСКОВЫЙ ТОРМОЗ: замена колодок неподвижными дисками с обеих сторон вращающегося диска тормоза в 4 раза уменьшит силу прижима тормозных колодок к диску, вдвое уменьшит холостой ход педали тормоза, износ тормозов, пылеобразование. С стороны колеса неподвижный диск закреплен в перемещающемся при торможении цилиндрическим корпусом (внутри вращающийся диск).
Воздух радиальных каналов диска тормоза, проходит внутренние каналы неподвижных дисков, охлаждая. Почти утроенная поверхность трения трехдисковых тормозов точнее дозирует тормозной момент на грани блокирования колеса, снижая расход шин, тормозов.
1990г Имола: от мелкого камешка попавшего между диском и суппортом тормоза сошел с трассы Айртон Сенна: с открытым диском тормоза небезопасны, трехдисковые безопасны.
В F1 электродистанционные задние тормоза: педаль управляет тормозами по проводам как педаль газа.
После турбонаддува 1980-х время круга улучшала мощность не мотора (до 1300л.с. в квалификации в 1980-х), а тормозов (3500л.с. передние тормоза сегодня) + сцепление шин.
Карбоновые диски тормозов, электронные амортизаторы подвески с обратной связью с датчиками ускорения. Зная: сцепление шин в торможении, в движении в повороте оптимально при 3-10% проскальзывании, FIA подняла расход шин, тормозов запретом антиблокировочной системы тормозов, противобуксовочной системы, асинхронных тормозов, активной подвески, шин без протектора и электроники.
FIA чтоб поднять расход шин запретила охлаждающие шины диски колес, систему DAS – двигая вперед-назад руль пилот менял угол схождения передних колес
ЖЕСТКИЙ СУППОРТ ТОРМОЗОВ: для уменьшения блокирования шин уменьшают задержку управления тормозами ростом жесткости суппортов тормозов, трубопроводов + тормозная жидкость с максимальными жесткостью на сжатие и скоростью звука в ней, снижением трения поршней + скользкое для жидкости тефлоновое покрытие трубопроводов + давление тормозной жидкости повысил гидроаккумулятор (компенсирует упругие деформации) + отжим поршней (для поддержки высокого давления тормозной жидкости: компенсация упругих деформаций) от диска тормоза кольцевыми тарельчатыми пружинами.
Жесткие суппорты тормозов: бериллиевый сплав: 66% бериллия + 33% алюминия: сплав с прочностью стали 4 раза легче, высокая теплопроводность, до 600°C удельная прочность выше всех известных конструкционных сплавов. Сплав скользкий: сверхмалое трение поршней суппорта уменьшило задержку управления тормозами. Твердость бериллиевых сплавов увеличила ресурс поршней суппорта тормоза.
Бериллий: жесткость 7 раз больше титана и алюминия, имеет высокое демпфирование, теплоемкость больше любого конструкционного сплава, скорость звука бериллия 12,5км/сек. 0,5% бериллия в сталь – пружины упругие до температуры красного каления, держат миллиарды циклов нагрузки. У бериллиевых сплавов рекордный ресурс: стальная рессора 850000 циклов полного сжатия, рессоры из бериллиевых сплавов 20 миллиардов циклов.
У части команд суппорт тормоза с композита «1см волокна карбида кремния + алюминиевая матрица». Такие суппорта как и алюминий-бериллиевые на 30% жестче, на 20% легче обычных. С моей точки зрения самый жесткий легкий суппорт – из бора, карбида бора.
Уменьшение задержки управления тормозами уменьшило расход шин, тормозов, повысило безопасность гонок. Ответ силовиков FIA: запрет жестких суппортов тормозов (материалы с модулем упругости > 80Gpa, композиты запрещены), запрет любых систем информирующих пилота о начале вращения колес после остановки, запрет гидроаккумулятора тормозов, запрет бериллиевых сплавов в автомобиле.
Запрет жестких суппортов тормозов (педаль тормоза теперь пружинит: пилоты жмут педаль тормоза силой до 180кг) втрое увеличил задержку управления тормозами из-за роста скорости тормозной жидкости.
1998г запрет суппортов тормозов не из алюминия – БЫСТРЫЕ тормоза запретили – нет обгонов из-за быстрых торможений перед поворотом – F1 не спорт, а шоу: спорт мешает доходам силовиков FIA.
По словам силовиков FIA запрет граунд-эффекта из-за 2 катастроф. Эти катастрофы от долгой задержки управления тормозами в непредсказуемых ситуациях из-за малого диаметра диска, огромного (усталость пилотов) усилия педали тормоза от запретов FIA.
FIA по прежнему вводит запреты увеличивающие задержку управления тормозами в непредсказуемых ситуациях с целью изгнания бедных команд – они финансово чувствительны к столкновениям автомобилей.
Запрет гидроаккумулятора (уменьшал задержку управления тормозами на 3%), жестких суппортов тормозов на 50% увеличил тормозной путь в непредсказуемых ситуациях.
Запрет вынесенных в кузов тормозов и диска тормоза диаметром > 27,8см. Инженеры уменьшили внутренний диаметр диска тормоза: больше ресурс тормозов, точнее дозировка силы тормозов. Ответ FIA: запрет внутреннего диаметра диска < Хсм.
Инженеры утолщали диск тормоза до 32мм: хватало на гонку, квалификацию. Ответ FIA: запрет диска толще 28мм. Хайнц-Харальд-Френтцен обвинил FIA в его катастрофе 1999г в Монреале: перегрелся лопнул правый диск от уменьшения диска до 28мм.
1998г запрет FIA поворачивать машину тормозя заднее колесо.
1987г: команда Lotus заняв 2-е место Гран При Аделаиды дисквалифицирована: слишком крупные воздухозаборники тормозов: размеры ограничила FIA для уменьшения ресурса тормозов (прибыль производителей тормозов).
2019г: запрет управления входным сечением воздухозаборника тормоза, запрет вывода горячего воздуха с тормозов наружу автомобиля через ось колеса.
Запрет софта, автоматики: машиной стало управлять труднее – радуются христиане добиваясь максимума физического труда пилота в наказание за съеденное Адамом, Евой яблоко.
Тормоза F1 хуже 19 века: 160кг сила в педали, нет точного дозирования силы тормозов, чувствительность к температуре хуже 19 века, холостой ход (проценты) педали тормоза больше тормозов 19 века из-за осевой нагрузки на диск тормоза 1 тонна: сильный износ, пылеобразование диска, колодки; стартовая задержка управления 0,02-0,03сек… Одноразовое фуфло ценой $миллионы в год
Христиане запретили профессиональную честь инженера, заменив на 30 сребреников предателя интересов гражданского общества. В христианских странах профессии инженера, ученого, контрразведчика – антиобщественные профессии
КАРБОНОВЫЕ ТОРМОЗА первые 0,02-0,03сек (задержка управления тормозами) прижима колодки к диску тормоза не работают: графитовый диск скользит до 120°C. На 200км/ч это рост тормозного пути на 1,11-1,66м с момента реакции пилота на непредсказуемую ситуацию и рост вероятности столкновения машин: невыгодно бедным командам. Пилоты ездят слегка зажав тормоза, сжигая лишнее топливо, ресурс тормозов: выгодно производителям тормозов, топлива
Керамические тормоза:
1. в углепластик перед прожариванием под давлением углеродсодержащего газа в автоклаве, добавляют 1см волокна карбида кремния и частицы металла, делая силу тормозов линейно (линейная характеристика) зависимой от силы в педали тормоза
2. углерод-углеродный диск прожаривают под давлением кремнийсодержащего газа: защита от окисления углерода
3. диск с армированного углеволокном карбида кремния
Керамические тормоза пришли с дорожных автомобилей: прогресс тормозов идет не с гоночных автомобилей к дорожным, а наоборот. Легче заставить ездить пилота на тормозах с нелинейной характеристикой сильно зависящей от температуры диска тормоза, чем покупателя автомобиля платящего деньги за точность дозировки силы тормозов, за минимум задержки управления тормозами и долговечность тормозов (керамические 4-5 раз долговечнее карбоновых).
Силовики Англии, Франции от FIA запретили в тормозах усилители, охлаждающие термоприводы (биметаллические пластины воздухозаборника тормозов…) с целью изгнать долговечные (ресурс 300000км) керамические тормоза.
У карбоновых тормозов с температурой растет и коэффициент трения – выгодно при запрете FIA терморегуляции, усилителя тормозов. До 300°C карбоновые тормоза плохо тормозят, оптимум 550°C, выше эффективность тормозов падает: 50% – 1650°C.
Убивая прогресс силовики Англии, Франции борются с классовым врагом – инженерами: эволюция технологий F1 медленнее чем в дорожных автомобилях. Представьте масштаб антиинженерного вредительства силовиков Мирового христианского правительства.
«Блаженны нищие духом ибо их есть Царствие Небесное» – слова Христа: сделать людей нищими духом, убить в человеке душу человека-Создателя. Христианская экономика F1 – экономика максимума оплачиваемого труда, дискредитации человека-Создателя. Евангелие – антисоздательская идеология силовиков.
Христиане придумали налог на углерод чтоб экозаконами выжать дополнительные налоги на дополнительные производство, ремонт автомобилей, утилизацию. Чтоб заменить автомобили электромобилями которые отравят планету миллиардами б/у аккумуляторов и принципом изначальной виновности человека загонят нехристианские страны в чувство вины для вмешательства христиан в их внутренние дела.
Экологических проблем от аккумуляторов электромобилей хватит для бомбардировки нехристианских стран с гибелью миллионов людей в гражданских войнах организуемых евгеникой Евангелия – Золотой миллиард. Экозаконы ограничив рабочий объем двигателя вызвали рост оборотов дизелей – законы физики, химии не дают топливу сгорать полностью так быстро – в выхлопе появились сверхмалые частички сажи: вызывают рак.
Для сокращения человечества до 1млрд христиан христиане экозаконами, экотиранией убивают экономику нехристианских стран.
Чернобыльская катастрофа – применение принципа изначальной виновности человека – небольшая авария – заставить подчиненных причинить вред государству, обществу, коллективу так чтоб начальство не пострадало, но подчиненных за вину загнать в рабство. Тонкий баланс вредительства отличает христосов – лиц христианского менталитета – от нормальных людей.
Христосы ненормальные люди, их действия не объяснит логика, здравый смысл. Евангелие вбито в сознание агентурой спецслужб, школой, вузами, работодателями по секретным инструкциям.
Сопротивление гражданского общества меняет приоритеты христиан – ослабляют один принцип Евангелия чтоб незаметно усилить давление другого принципа.
По учебнику рабовладельцев Евангелие главная функция государства – принципом изначальной виновности человека принудить граждан выполнять работу к которой нет способностей чтоб от чувства вины признали себя рабами Евангелия.
Христиане утверждают – тупыми легче управлять. Чем менее интеллектуальны люди, тем менее уравновешены, больше конфликтов, преступлений – больше прав, денег накачает себе класс силовиков. Христианские силовики алкоголем недоеданием (борьба с богатством) ослабляют мозги граждан чтоб делали больше ошибок по принципу изначальной виновности человека с рабством за вину.
Принцип изначальной виновности человека дает госвласть только моральным уродам, делает их марионетками компромата чтоб отсутствием логики создать управляемый хаос в стране.
Христианские страны направляют мир к ложным преступным идеям. Чтоб убивать врагов Христа натравив их друг на друга, агентурой вскрыв одним преступность взглядов других.
F1 не высокотехнологична. Высокотехнологичность меряют количеством качеством пользовательских, а не технологических функций. Качество пользовательских функций: процент от идеального значения, оценки пользователей
ЛЕНТОЧНЫЙ ТОРМОЗ: в трассах где много поворотов ставят меньше чувствительность (больше ход педали) педали газа в нижней половине мощности. Необходимость дозирования тормозной силы заменит дисковые на ленточные тормоза с каналами центробежной вентиляции в барабане: вентиляционные отверстия в барабане охладят карбоновую (нитридборовую: волокна нитрида бора) тормозную ленту.
По весу, ресурсу ленточные тормоза лучше дисковых. Больший чем у дисковых тормозов рычаг тормозной силы в колесе повышает точность её дозирования, уменьшает усилие в педали тормоза, уменьшает расход тормозов и шин.
Профильно-кулачковый (трехкулачковый распредвал) механизм ленточного тормоза: в кулачковом валу два профилированных кулачка тянут на себя задний конец тормозной ленты, передний конец ленты тянет на себя центральный профилированный кулачок. Тормозная сила колес линейно зависит от угла наклона педали тормоза – коэффициент самоусиления тормоза растет с наклоном педали тормоза
ЗАДНЯЯ ЦЕНТРОВКА АВТОМОБИЛЯ: 2008г любитель самой задней (60-70% в задние колеса) центровки автомобиля 7-кратный чемпион мира Шумахер для точной дозировки заказал длиноходную педаль газа. Алгоритм Шумахера: отношение нагрузок передних, задних колес в повороте как у стоящего на месте автомобиля + повороты с малым ускорением прижимая к асфальту задние колеса. Это позволяет более заднюю центровку автомобиля, педалью газа симулируя нейтральную или недостаточную поворачиваемость автомобиля. Можно автоматизировать обратной связью педали газа с датчиками продольного, бокового ускорений автомобиля или обратной связью педали газа с датчиками силы пружин передних, задних колес.
Задняя центровка автомобиля – больше рекуперация энергии торможения, больше проходимость при вылете с трассы, больше шансы более изобретательных (ярче профессиональное вдохновение) бедных команд. Чтоб уничтожить положительный человеческий фактор христиане запретили > 53% веса в задних колесах, систему курсовой устойчивости.
Шумахер заказал Ferrari заднюю центровку: можно тормозить позже всех не 2, а 4 колесами (экономия шин, тормозов), быстрее разгон с поворота. Применять автомобили с задней центровкой мешает отсутствие системы курсовой устойчивости и обгонной муфты (с пружинной муфтой гасящей удар об собачку) главной передачи (задний ход: муфту блокирует механизм). Пилот устает дозируя (блокирование колес) ход педали газа. С обгонной муфтой не устает, экономится топливо, исчезает занос колес на мокром асфальте в переключении передач вниз.
1980-е: «Феррари» обвиняют: от задней центровки ее машин погибло много пилотов. Виновата не задняя центровка, а отсутствие обязательного с задней центровкой рулевого механизма переменного передаточного числа: в районе нулевого положения руля передаточное число больше чтоб движение руля не вызвало занос. При отходе руля от нуля передаточное число быстро уменьшается. Ниже на моём рисунке 1998г изобретенный мной рулевой механизм с переменным передаточным числом
 2017г: христиане в FIA ввели правило: одинаковому перемещению рычага сцепления на руле соответствует одинаковое перемещение дисков сцепления независимо от положения – далеко или у самой точки схватывания: износ дисков вырос – классовая борьба силовиков против инженеров.
2017г: христиане в FIA ввели правило: одинаковому перемещению рычага сцепления на руле соответствует одинаковое перемещение дисков сцепления независимо от положения – далеко или у самой точки схватывания: износ дисков вырос – классовая борьба силовиков против инженеров.
Христианские силовики везде строят размножающуюся систему, наращивая карательные права против тех кому «служат». Силовики должны уйти с технических видов спорта, это сфера ответственности инженеров (индивидуальная профконкуренция универсальных инженеров), пилотов
КОЛЕСА: запрет диаметра обода передних колес > 33см (45см у дорожных, 48см у спортивных автомобилей) – высокопрофильные шины. Высокопрофильная шина на 10% дороже, управляемость автомобиля хуже от колебаний 0,3-1,5Гц на 4см шин в осевом направлении.
С низкопрофильными колесами легче, эффективнее настройка схождения, настройка амортизаторов колес на защиту от клевков автомобиля. Низкопрофильные колеса переносят в разы больше энергии с шин в амортизаторы: меньше износ шин, в разы меньше задержка тормозов в непредсказуемых ситуациях, в разы безопаснее прокол шины.
FIA запретила усилители тормозов и руля, кондиционер для прибыли производителей шин, тормозов: усталый (раньше уйдет на пенсию – меньше человеческий фактор в спорте, сильнее роль денег) пилот тратит больше шин, тормозов, больше столкновений – меньше бедных команд
ДЕМПФЕР МАСС (давал 0,3сек на круг: 2005-2006г): 9кг-груз между 2 разными пружинами (ось вертикальна) спереди автомобиля Renault R26 гася колебания кузова разницей резонанс-частот кузова и колес, увеличил сцепление колес с дорогой, уменьшил вибрацию, тормозной путь, расход тормозов, шин. Для роста расхода тормозов, шин и столкновений (изгнание бедных команд) FIA запретило демпфер масс.
Сговор: 1 год монопольно лепит сверхприбыли экономя на разработках одна шинная фирма, другой год другая… Производители шин гребут сверхприбыли через третьи, четвертые, пятые лица финансовых колец. Под многолетним давлением этой статьи (глобально управляет законами вероятности для инженеров) антимонопольные органы Евросоюза расследовали финансовые кольца F1. Менеджеры натравили (финансовые кольца F1 дают миллиарды налоговым органам) налоговиков против антимонопольных органов. Те сдались.
Силовики FIA удорожали Формулу E запретив электромобили без главной передачи, дифференциала: самую экономичную, самую дешевую, самую легкую схему электромобиля «большого диаметра 2 электромотора задних колес» заменили самой дорогой (рост номенклатуры высокоточных деталей), самой неуправляемой схемой «1 электромотор + главная передача + дифференциал»
АКТИВНАЯ ПОДВЕСКА: защищая прибыли производителей тормозов, шин FIA запретила высшее достижение F1 активную подвеску: комфортнее эквивалентной жесткой настройки обычной подвески, меньше устает пилот, лучше управляемость, безопасность автомобиля; почти двойная экономия шин, меньше расход тормозов и вибрация руля.
Выгодная бедным командам активная подвеска выкинула с автомобиля F1 все амортизаторы, все стабилизаторы поперечной и продольной устойчивости с их отдельно настраиваемыми (амортизация крена, клевков автомобиля) амортизаторами; вдвое облегчила, удешевила пружины (торсионы) подвески. Добавлены 4 гидроцилиндра, 4 датчика хода подвески, 2 датчика ускорения.
Софт учитывая продольное, поперечное ускорения машины, скорость автомобиля, обеспечивал одинаковый дорожный просвет в подвеске каждого колеса таблицами решений реальной трассы. Таблицы реальных трасс отличались от универсальных эталонных таблиц решений небольшими коэффициентами.
Софт заранее управлял клапанами гидроцилиндров по сигналам датчика угла поворота и угловой скорости руля, датчика скорости воздуха, датчиков силы и скорости её роста и падения в педалях газа, тормоза, не дожидаясь крена, клевка машины.
После освоения бедными командами FIA запретило активную подвеску чтоб не дать бедным командам экономить деньги на высокооплачиваемых (зарплата, межконтинентальные транспортные расходы, оборудование, места в боксах) инженерах, экономить деньги на расходе шин для настройки подвески. Активная подвеска позволяет пилоту настраивать подвеску в реальном времени.
FIA ждет освоения бедными командами сложных систем: бедные команды освоят медленнее богатых. Силовики Англии, Франции фиксируют конец доводки систем бедными командами – внезапный запрет – бедные команды без денег, спонсоров.
FIA максимально удорожает гонки F1: Христос враг личного и семейного капитала, но не враг корпоративного (акционерно-колхозного) капитала – в 1930-х христиане голодом загоняли единоличников (предпринимателей) рабами в колхозы, госпредприятия.
По идеологии Христа мир состоит из рабовладельцев, рабов, надзирателей над рабами. Надзиратель выполняет функции принуждения, управления, учета, контроля, распределения. Он в 2-5 раз дороже раба. Рабовладелец экономя деньги прикрепляет к надзирателю максимум рабов коллективизацией труда, укрупнением предприятий. Поэтому христиане враги единоличников.
Для борьбы с изобретателями, бедными командами FIA усиливает роль шпионажа, количества мозгов, денег. FIA за взятки с владельцев гоночных трасс ОГРАНИЧИЛА ВРЕМЯ стендовой доводки моторов, принудив команды МНОГОКРАТНО переплачивать деньги владельцам трасс, производителям шин, тормозов от роста километража испытаний новых моторов. Компьютерные стенды работая без людей круглосуточно, удешевляют доводку техники
СОФТ: 1994г: польский инженер-программист Тадеуш Чапски софтом мотора создал запрещенные FIA антиблокировочную, противобуксовочную системы, электронный дифференциал: экономия топлива, ресурса мотора, сцепления, коробки передач, шин, тормозов и денег. Чапски: ведущие колеса забуксовали – тормозной момент от колес в коленвале мотора уменьшится – угловое ускорение коленвала растет.
Противобуксовочная система Чапски: угловое ускорение коленвала больше, чем на X% от кривой «подача топлива – угловое ускорение коленвала на этой передаче» – уменьшить подачу топлива на Y%. По отдельной таблице решений в каждой передаче. Пока угловое ускорение коленвала мотора не войдет в эталонный диапазон.
Эталонный диапазон по низу – антиблокировочная система Чапски: при уменьшении подачи топлива отрицательное угловое ускорение коленвала на X% меньше, чем в кривой «подача топлива – угловое ускорение коленвала мотора на этой передаче» – увеличить подачу топлива на Y%.
Таблицы решений на каждую передачу, на разные температуры, влажности воздуха, на сухую, мокрую трассы, на разный тип асфальта, на разные температуры (радиодатчик температуры колеса) шин.
Самоблокирующий электронный дифференциал Чапски: внутреннее колесо (поворот) теряет нагрузку, сцепление с асфальтом, блокируется – алгоритмы Чапски торможением (разгоном) мотора уберут пробуксовку (блокирование), занос ведущих колес. Датчика момента нет: хватает датчика оборотов мотора.
Христиане отомстили Тадеушу Чапски за демократизацию (строчки софта уравняли бедные, богатые команды) технологий: запрет электронной педали газа и электронного управления усилителем руля, ограничили число каналов датчиков. Шпионский блок (свой запрещён) электронного управления мотором с принудительным шпионским софтом команды ОБЯЗАНЫ КУПИТЬ у подрядчика FIA.
Ответ инженеров: запретный софт самоудаляется (маскируется под законные таблицы решений) при невыполнении условий запуска, поиска. Сделали датчик давления впускного патрубка мотора: встречный поток воздуха растит давление с ускорением автомобиля. Таблица решений «скорость роста давления воздуха – ускорение автомобиля» по эталону ускорения убирала буксовку (блокировку) колес уменьшением (ростом) подачи топлива мотору, выполняя функции противобуксовочной, антиблокировочной систем.
Таблицу решений прятали от FIA в таблицах решений системы компенсации изменения эффективного давления в конце такта сжатия, которые регулировали опережение зажигания и угол открытия дросселя в зависимости от абсолютного давления в впускном патрубке. Софт создавал в реальном времени таблицу решений «скорость роста давления в впускном патрубке – ускорение автомобиля» путем сложения или вычитания цифр с законных таблиц опережения зажигания, угла открытия дросселя.
FIA сочло это воровством прибыли производителей топлива, шин, тормозов: запрет датчика в впускном патрубке + сверхдорогая проверка (за огромные налоги собранные с команд силовиками FIA) софта.
Ответ инженеров: софт вычисляет ускорение автомобиля по таблице решений «эталон углового ускорения коленвала – ускорение автомобиля» по сигналам датчиков мотора, амперам генератора и таблицам решений его софта путем сложения, вычитания цифр законных таблиц решений. Подобные системы с перекрестными обратными связями тайно используют (функции противобуксовочной, антиблокировочной систем без отсечки части цилиндров, демаскирующих признаков) некоторые команды F1.
Запретами софта, датчиков силовики Англии, Франции блокируют зависимость конкурентоспособности товаров в мировом рынке от софта так же, как блокируют изобретателей. В США изобретатель за каждый патент отдает годовую зарплату рабочего + чудовищные штрафы за не вовремя уплаченные пошлины. В России за каждый патент полугодовую зарплату рабочего + потеря силы патента за не вовремя уплаченную пошлину.
В начале 20 века христиане для создания, защиты (от колонизаторов Галактики) Мирового христианского правительства решили закрыть человечеству колонизацию звезд, с этой целью евгеникой Евангелия убить миллиарды людей нехристианских наций: заказали масону Эйнштейну лженаучную (по толкованию формул, явлений) Теорию относительности чтоб задушить работу изобретателей звездолета
Теория относительности нарушает:
1. закон сохранения импульса
2. закон сохранения массы
3. закон сохранения энергии
4. закон-3 Ньютона
5. закон Доплера
6. закон сложения скоростей
7. закон постоянства времени
8. понятие «инерциальная система отсчета»: скорость якобы меняет одни законы физики из-за других – этому противоречат эксперименты с ускорителями частиц
9. принцип независимости системы координат от гравитационных полей
10. ввела «абсолютную скорость» без однозначного смысла. Слова, понятия в науке могут иметь только однозначный смысл.
11. разрушает смысл понятия «пространство». Пространство как абстрактное однородное математическое понятие не может иметь форму.
Баллистическая теория Ритца всё объясняет точнее, логичнее, не создавая проблем законам физики: ritz-btr.narod.ru
Евгеника Евангелия началась с эксплуатации еврооккупантами иудейского мифа – придет Мессия, защитит иудеев от еврооккупантов. Иисус Христос – агент еврооккупантов – пропагандист коммунистической идеологии созданной еврооккупантами для экономического геноцида народов Азии, Африки.
Евангелие – это культ самоубийства человечества за грехи, созданный еврооккупантами в Азии для сокращения её населения. Христиане ждут 2-го пришествия Христа – придет физически убить всех людей за грехи, сделает их копии в виртуальных планетах Рай и Ад. Это принуждает христиан сокращать человечество: их идол – Сокращатель человечества. Евангелие – это пропаганда самоубийства человечества. Христиане – главная угроза существованию человечества после изобретения ядерного оружия.
Для силовиков христианских стран Евангелие это сверхценные идеи для силовиков, превосходящие своей ценностью всё остальное в этом мире. Они готовы по идеологическим мотивам убить человечество, если не примет Евангелие как сверхценные идеи. Пока только сокращают человечество до 1млрд христиан. Евангелие – идеологический вирус превращающий силовиков в разрушителей государства изнутри. Для силовиков Евангелие – это Уголовный Кодекс государства, Ветхий завет Библии – это Комментарии к Уголовному Кодексу.
Евангелие – самая антисемитская книга, которая внушает – евреи враги, еврооккупанты добродушные спокойные ребята, которые не портят отношения с евреями. Эти добродушные спокойные ребята мечами разрубили на куски почти всех евреев в их Родине, сделав евреев народом-изгнанником на тысячу с лишним лет. 20 веке европейцы-христиане повторили геноцид, убив 6 млн евреев при президенте-католике Гитлере.
Студент парижского университета, член компартии Франции, агент Франции Пол Пот коммунистической идеологией очищал от людей Камбоджа по евгенике Евангелия – Золотой миллиард. Еврейский Пол Пот – агент Иисус Христос – коммунистической идеологией очистил еврооккупантам от евреев их Родину.
Христос – вымышленный еврооккупантами агент, которого как его реальных прототипов убили евреи, как предателей. 30 сребреников агентов европейцы внесли в Евангелие, платят и сегодня предателям своих стран. Христос сократил человечество на миллиард человек за 2000 лет.
Евгеника Евангелия уничтожает нехристианские генотипы человека с целью СПАСЕНИЯ ДУШИ ЧЕЛОВЕКА – генетический отбор заменяющий людей думающих обществом догматиков по принципу – в генетической программе человека не должно быть человеческих целей – только животные цели – чистый лист бумаги в который силовики запишут Евангелие.
Контрразведка Рима пропагандой Христа уравняла свою власть с властью римского императора равного богам. Власть христиан в Риме превратила в преступление сравнение императора с Богом, позволив контрразведке оккупировать Правительство своими людьми, начала евгенику Евангелия – создание породы граждан-рабов по учебнику рабовладельцев Евангелие. Идея быть классом рабовладельцев чтоб все деньги, собственность, лучшие самки достались силовикам, делает их марионетками Евангелия.
Христиане сокращая человечество вместо колонизации Галактики закрывают человечеству путь к звездам. Непрерывными войнами (Библия обещает власть над всеми народами), революциями христиане расчленили, обезлюдили свои страны.
Часть христианских идеологов России в 1990-х помогала США строить Мировое христианское правительство через разрушение России. 1965г христианская инквизиция КГБ выпустила секретную инструкцию отнимающую рабочее место физикам за критику Теории относительности.
В конце 1970-х КГБ отправила в дурдом крупнейшего изобретателя спутниковых навигационных систем, доктора технических наук физика Василия Петровича Селезнева за попытку напечатать в издательстве научную книгу «К звездам быстрее света» (напечатана 1993г) с критикой лженаучной Теории относительности.
Президиум Российской академии наук 3 раза принял постановления «О недопустимости критики Специальной теории относительности»: запрет публикации результатов науки противоречащих Специальной теории относительности.
Профессор Ленинградского политехнического института А.Денисов выпустил книгу «Мифы теории относительности» – хотели лишить учёных званий, выгнать с работы. Спасло избрание депутатом.
Евангелие – созданный еврооккупантами в Иудее учебник рабовладельцев, уничтожающий институт частной собственности и предпринимательства (рабам запрещено), институт эксплуатации (отношения начальник – подчиненный) человека человеком, институт семьи, институт профессиональной чести (гордыни) народа, институт накопления личного и семейного капитала.
Контрразведка христианских стран – это организация мстителей – идеологических силовиков мстящих гражданам за невыполнение коммунистической идеологии еврейского царя Иисуса Христа. Это глубинное государство христианских стран, иностранные агенты служащие иностранцу – царю Христу, а не гражданскому обществу.
ООН – христианская инквизиция принуждающая нехристианские страны внедрять антигосударственные принципы Евангелия. Христиане создали ООН для реализации их целей.
Цели ООН:
1. создать впечатление законности международного бандитизма, военных преступлений христианских стран
2. создать впечатление законности конфискации христианами собственности (банковских вкладов, недвижимости...) нехристианских стран перед бомбардировками. Перед разрушением христианами Ливии, Ирака ООН заблокировала в всем мире их банковские счета
3. объявлять запрет на использование госвласти Правительствам нехристианских стран перед бомбардировками. ООН расчленила Ливию запретив ей использовать военную авиацию против иностранных банд пригнанных в Ливию спецслужбами христиан. ООН не признает монополию государства на насилие на своей территории
4. ввод экономических, политических, военных санкций против стран мешающих христианам создавать Мировое христианское Правительство
5. применение против нехристианских стран вакцин сокращающих население. Христиане в 21 веке через ООН убили полмиллиарда африканских детей стерилизовав вакциной от столбняка 140 млн африканских женщин – у них 6-7 детей на семью. Христиане в своих 330 зарубежных военно-бактериологических лабораториях ищут технологию стерилизации 7 миллиардов человек по евгенике Евангелия – Золотой миллиард
6. применение экотирании против нехристианских стран для сокращения их экономики, населения
Христиане создали ООН по принципу объединения наций, а не стран чтоб разрушать страны террором нетитульных наций против титульной.
Приоритет прав стран выше приоритета прав нации. Приоритет прав человека выше приоритета прав нации. Приоритет прав семьи выше приоритета прав детей. Приоритет прав государства не выше приоритета прав гражданина – классовые интересы силовиков на ~50% противоположны интересам гражданского общества.
Через ООН христианские страны организуют санкции против африканских стран для вмешательства в внутренние дела с целью расчленения, сокращения населения христианскими спецслужбами.
Африканцы строят фармацевтическую фабрику (защита от военно-бактериологических лабораторий христиан) – христиане объявляют производство химического оружия, бомбят фабрику как в Судане 1998г.
Мировое христианское правительство не допустит колонизации Галактики человеком – колонисты став сильнее вернут суверенность странам. Причина стремления христиан создать Мировое правительство: Евангелие – учебник рабовладельцев строящий рабовладельческое государство по образу Римской империи. Проблема рабовладельческих государств – бегство рабов с этих государств. Для пресечения бегства рабов рабовладельческое государство должно захватить всю планету. Главная сила создающая Мировое правительство – генералы контрразведки, разведки (глубинное Правительство) христианских государств, христианские миссионеры ведущие пропаганду Евангелия.
Всемирную торговую организацию ВТО создали христиане чтоб страны не защищали суверенитет торговыми санкциями. ВТО запрещает экономические договоры без вмешательства третьих стран. ВТО механизм расчленения стран. Прообраз ВТО – нападение на Китай 7 христианских стран за блокирование китайскими боксерами торговли христианским опиумом – антихристианское восстание китайских боксеров (1898-1901г) против христианских оккупантов – китайцы по всему Китаю уничтожали христиан, церкви. Христиане продавая китайцам опиум на 25% сократили население Китая.
Христиане запретом профессиональной гордыни нарушают право человека-Создателя на моральную поддержку обществом. Двигатель технического прогресса – профессиональная гордыня, мания изобретательства, мания профессионального величия.
Богатство граждан, богатство семьи, ее защита от государства – главные ценности мира. Евангелие запрещает быть богатым, служить профессиональной гордыне, хранить верность семье – бомж Христос идеолог ювенальной юстиции. Результат: развитие граждан и стран в направлении корпоративного террора, геноцида народов за природные ресурсы.
Надо законом ввести в всех странах уголовную ответственность за пропаганду Евангелия – учебника коммунистов уничтожающего институт эксплуатации человека человеком (отношения начальник – подчиненный), институт частной собственности и предпринимательства, институт семьи, институт профессиональной чести (гордыни) народа, клубы делящие людей по социальному признаку.
ООН, ВТО, МВФ – прототипы министерств Мирового христианского Правительства – шлифуют технологии свержения титульных наций, подавления торговых прав стран перед расчленением. Нужно ограничить права всемирных организаций экономическими и военными союзами стран. Это ускорит колонизацию Галактики, усилит роль инженеров в мировой истории.
Придя к власти Мировое христианское правительство сделает то, что США организовывало в 2000-х – госмонополию на искусственный интеллект ИИ пропагандой ненависти к ИИ. США организовало в 2000-х демонстрацию людей против ИИ в Техасе – США загоняло специалистов ИИ рабами в секретные организации.
Специалистов ИИ от спецслужб спас Китай вложив в ИИ большие деньги с бюджета. Узнав это США убрали пропаганду ненависти к ИИ. Мировое христианское Правительство будет добиваться госмонополии на экономику как в СССР. Христиане создают Мировое христианское Правительство с целью сделать антигумманистические принципы Евангелия едиными правилами жизни всего человечества. Затем поставят перед фактом – приняв нашу идеологию вы обязаны подчиняться нам.
Главная угроза человечеству – строительство любого Мирового Правительства: без конкуренции стран прекратится научно-техническое развитие человечества, а бюрократический аппарат Мирового правительства секретными службами будет хаосом, террором убивать «лишние» 7 млрд чел планеты.
Бюрократический аппарат Мирового Правительства для сохранения власти на всей планете, запретит развитие технологий и полеты звездолетов к звездам, упоминания об этом в интернете и СМИ, превратит планету в Концлагерь смерти.
Только противостояние равных по силе крупных стран, военных союзов, только перенаселение планеты ускорят технический прогресс, заставят человека колонизовать Галактику. Христиане антиинженерными запретами (запрет Свободных формул автомотоспорта…), торговыми санкциями уничтожают техническую конкуренцию стран.
Самые ожесточенные войны в Истории – религиозно-идеологические войны между христианскими странами по мотивам учебника идеологических террористов Евангелия. Христиане подняли идеологическую нетерпимость государства на уровень геноцида народов-еретиков, многократно сократив население Европы. Человечество подтолкнет христиан к взаимному самоуничтожению для уничтожения учебника идеологических террористов Евангелия
РУЛЬ: больше угол поворота – плавнее, медленнее должны работать педали газ, тормоз – софтом делать запрещено – множатся кнопки, рычаги руля. Результат запретов FIA: в руле 6 рычагов управляющих коробкой передач, сцеплением. Запрет автомат-коробки передач дал рулю подрулевые рычаги переключения передач, сцепления, кнопку нейтрали (сцепления).
Ограничения рекуперации энергии дали рулю 2 переключателя, кнопку рекуператора. Ограничения софта, датчиков дали рулю кнопку поиска момента сцепления, 2 рычага управления (в зависимости от угла поворота руля) электронным сцеплением. Пилот F1 как колхозник-тракторист – руки летают по куче рычагов.
Ограничения софта, датчиков дали рулю колесики ограничителя оборотов, переключатели регулировки мотора, момента и настройки газа, зажигания; кнопки выбора топливной смеси и перекачки масла, кнопку давления масла, кнопку выключения мотора, тумблер смены режима подачи информации на основном дисплее, кнопку электросистемы и выключения мотора, кнопки регулировки антикрыла.
Запрет антиблокировочной, противобуксовочной систем дал рулю переключатели дифференциала для средней части поворота, для входа-выхода с поворота, кнопки блокировки-разблокировки дифференциала, переключатели типа покрышек, колесики баланса тормозов «передняя ось – задняя ось», кнопку поиска момента сцепления.
Взамен антиблокировочной системы тормозов – система баланса тормозов – втрое дороже антиблокировочной системы: появились инженер по балансу тормозов, регулировка баланса тормозов в руле: пилот меняет баланс компенсируя выработку топлива, износ шин, изменение состояния дороги.
Ограничение мгновенного расхода топлива дало рулю переключатель потребления топлива. Ограничения, запреты FIA подняли цену руля до $80000. Софт 1000 раз дешевле 6 рычагов, десятков переключателей, кнопок с их системами обратной связи, диагностики
Без запретов всё автоматизирует искусственный интеллект: автопилот + универсальный визуально-голосовой (в экране руля) аватар. Теория решения изобретательских задач ТРИЗ: идеальный объект (система) – объект (система) которого нет, но его функции выполняются по количеству, качеству. Эволюция техники идет к технологическому упрощению; к росту количества, качества пользовательских (не путать с технологическими) функций; к автономности техники
ТЕНЗОМЕТРИЧЕСКИЙ РУЛЬ: при скорости нервных импульсов 100м/с время передачи сигналов мозга до мышц ног – 0,15сек, до рук 0,07сек – на 0,08сек быстрее. За 0,08сек автомобиль проходит 2,2м на 100км/ч. Если вместо ног тормозить руками тормозной путь на 100км/ч уменьшится на 2,2м. Предлагаю педали автомобилей заменить тензометрическим (тензометрические датчики деформации руля) рулем.
Тензометрический руль реагирует на силу без заметного перемещения: пилот наклоняет (плоскость руля поворачивается в поперечной горизонтальной оси, проходящей через ось руля) ручки руля вперед (пилот не чувствует наклона) – автомобиль разгоняется, пилот наклоняет (пилот не чувствует наклона) ручки руля на себя – автомобиль тормозит. Пружина загоняет руль в нулевое положение.
Рулем дал газ – включится постоянное ускорение автомобиля по максимуму силы нажима. Ускорение можно уменьшить только нажав с соответствующим усилием на тормоз. Эта система управления автомобилем обратной связью «газ – датчик ускорения» автомобиля дает ему плавное (меньше износ шин, пробуксовка) ускорение, уберет рывки, уменьшит блокировку тормозов и усталость пилотов, увеличит ресурс тормозов, шин, мотора.
Часть пилотов для более точного дозирования газа, тормоза вместо тензометрического руля предпочтет поворот (возвратные пружины) руля в горизонтальной оси, проходящей поперек оси руля.
Не выставила команда 2 машины на гонку: крупный штраф. FIA изгоняет бедные команды запретом участвовать только в одном этапе гонок, запретом покрытий толще 0,8мм в деталях мотора и композитов с металлической матрицей. Плазменно-напыленное на дешевую деталь мотора покрытие большой толщины из сверхтвердого износостойкого материала с последующей шлифовкой алмазным кругом 20 раз дешевле изготовления детали из сверхтвердого износостойкого материала.
Я шлифовщик-инструментальщик (стаж 7 лет) свидетельствую: с учетом цен, ресурса абразивных кругов, стоимости часа работы шлифовщика шлифовка детали алмазными кругами 8 раз дешевле любой другой. Правит алмазный круг алмазный карандаш в охлаждающей жидкости.
FIA требует 12V бортсети (36V надежнее дешевле), запретили углепластиковые шпильки блока цилиндров. Для изгнания бедных команд (слишком изобретательны) силовики Англии, Франции от FIA запретили поршни, головки, блоки цилиндров с композиционных материалов армированных углеродным или арамид-волокном. Запрет композитных материалов сделал в разы дороже разработку доводку эксплуатацию высоконагруженных конструкций.
По принципу «F1 – корпоративный бизнес» (корпорация идеологических силовиков) силовики Англии, Франции запретили работу мотора в любом варианте кроме 4 и 8 цилиндров; запрет управлять мощностью автомобиля настройками мотора, программными точками по ходу педалей; запрет управлять мотором через положение, движение, работу сцепления.
Электромеханический усилитель руля тратит топлива вдвое меньше гидроусилителя – запретили: больше расход энергоресурсов, больше поводов расчленять страны.
У человека есть право для защиты автоспорта от идеологических силовиков создавать Международные антихристианские организации по техническим видам спорта, устраивать чемпионат мира; есть право в уставе созданной им частной всемирной организации иметь запрет любых постоянных соглашений, договоров с любыми организациями; право на систему защиты от спецслужб, от клубов предпринимателей, политических клубов как антиинженерных структур
ФОРМУЛА ТГК: самые практичные для колонизации Галактики технологии развивает антихристианская инженерная Свободная Формула – Технологии Галактических Колонизаторов – ТГК:
1. формула ТГК – спорт, а не бизнес или шоу. Можно делать деньги, но не за счет отказа от принципов спорта. Спорт – соревнование, смысл которого не уравнять шансы (лотерея – противоположность спорта) спортсменов и команд, а максимально точно найти самых сильных спортсменов, самые сильные команды, публично воздать им честь за превосходство. Не забыв упомянуть стоящих после них
2. денежные залоги, взносы участников гонок в пользу организаторов запрещены. Организаторы, судьи работают добровольно за идею колонизации Галактики человеком, а не за деньги чтоб организаторами не становились силовики реализующие классовые интересы силовиков. Соревнования реализуют долговременные интересы всего гражданского общества, а не интересы одного класса. Если в гонках появятся денежные штрафы для команд и пилотов, оплата работы судей и организаторов – означает: автогонки захвачены силовиками, которые всегда стремятся перевести в деньги, налоги и лицензии любую деятельность человека с целью в идеале свести к нулю способность талантливых и гениальных инженеров получить влияние в обществе без разрешения класса силовиков. Деньги, налоги, лицензии делают мир враждебным для инженерных талантов, гениев. Силовики увеличивают количество и жесткость ограничений в спорте – это усиливает силовиков, уничтожая смысл спорта. Формула ТГК – частная организация, финансирование которой запрещено любым государствам. Госслужащие не имеют права работать в Формуле ТГК – конфликт интересов «силовики – инженеры». Главный классовый интерес силовиков – создать необходимость (для финансирования силовиков) насилия или принуждения с стороны государства, международной организации или спортивной организации. У инженеров противоположный интерес – скрытый конфликт с силовиками неизбежен
3. антихристианская Формула ТГК не может быть госорганизацией – это рождает коррупцию, нарушения прав человека и вытеснение идеологии колонизации Галактики классовыми идеологиями
4. правила создают, подтверждают голосованием только активно действующие в гонках представители команд. Запрещено использовать слово «федерация»: оно закладывает в спорт многоступенчатую иерархию, противоречащую принципу равноправия судей, парламентариев в принятии решений. Криптозащищенное гласное интернет-голосование. Решения голосования (по пунктам) противоречащие цели эволюции технологий колонистов Галактики, запретит Инженерная комиссия
5. правила меняют большинством в ⅔ голосов Парламента антихристианской Формулы ТГК. Нет 90% голосов: новые правила вступят в силу через год чтоб бедным командам хватило денег, времени на подготовку. Ученым запрещено входить в Парламент ТГК. Ученые предатели интересов гражданского общества. Ученые заказными экологическими, климатическими теориями помогают силовикам заставить инженеров «экологически» усложнять технику для роста налогов. Экологические налоги – это регулярная принудительная смена транспорта, переплата денег гражданами за энергию и еду с целью максимума налогов (рост производства, торговли) для создания паразитических рабочих мест госслужащих и силовиков, родственникам силовиков
6. весь процесс принятия решений в Парламенте антихристианской Формулы ТГК в реальном времени открыт для всего человечества в интернете без оплаты и авторизации доступа к информации. Стопроцентный доступ к информации кто, как с какими коментами проголосовал
7. презумпция невиновности
8. нет обратной силы правил: правило действует после объявления, но не до этого
9. формула ТГК командный вид спорта. Любая команда может иметь любую численность, любой бюджет при условии: изобретательность команд не ограничена. По итогам года побеждает команда набравшая максимум очков: 1-е место 10 очков, второе 9, третье 8, четвертое 7, пятое 6, шестое 5, седьмое 4, восьмое 3, девятое 2, десятое 1
10. максимальный сухой стартовый вес автомобиля 150кг
11. ограничена занимаемая автомобилем на старте площадь: длина автомобиля умножить на ширину
12. управление газом, тормозами только по проводам с 3-кратным дублированием и полнофункциональной системой диагностики
13. из двигателей внутреннего сгорания разрешен только газотурбинный двигатель
14. надувные шины запрещены
14. прочность подвески, колес, подшипников, кузова регламентирована. Проверка в стендах
16. внешние стартеры мотора, других систем запрещены
17. ограничение скорости через ограничение объема, цены топлива. Запрет дозаправки. Стоимость заправки новым топливом от средней оценки, взаимно не сообщающихся (слабый эксперт сам вынесет себе приговор) экспертами, стоимости топлива при его промышленном производстве. Каждый автомобиль заправят разрешенным количеством топлива + 10% избыточного топлива. Автомобиль дисквалифицируют с гонки если не дойдет до финиша истратив 10% избыточного топлива. За каждый истраченный процент избыточного топлива на пилота штраф Х секунд по формуле согласованной всеми командами или другой неденежный штраф на команду, ухудшающий ее положение в турнирной таблице. Денежные штрафы запрещены принципом равноправия бедных, богатых команд. Равноправие дает бедной команде право участвовать только в одном этапе чемпионата если нет денег
18. взрывобезопасный топливный бак
19. запрет: токсичное (токсичный выхлоп) топливо
20. ограничения на токсичные материалы
21. запрет жидкой смазки, только твердая смазка работающая в вакууме при температурах поверхности планет Солнца
22. запрет в шасси открытых подвижных линейных направляющих, на которые может попадать дорожная пыль. Подходят шарнирно-рычажные конструкции
23. запрет гидроамортизаторов. Подходят фрикционные, электромагнитные
24. пилот имеет право на 2ч знакомства без чрезмерных помех с незнакомой трассой в своем гоночном автомобиле
25. у пилота возможность покинуть автомобиль не более чем за 5сек
26. эволюция автомобиля направлена на повышение ресурса, равнопрочности, живучести, безопасности конструкции автомобиля: гонка длится не < 15ч. Команде каждый лишний час добавляют 1мин, если пилот за рулем > 8ч (безопасность).
27. обслуживает автомобиль, меняет колеса только работающий пилот
28. регулируемое антикрыло может действовать на упругий элемент подвески, через механизм кузова, с системой гашения колебаний «антикрыло-кузов» (< 0,4Hz, амплитуда < 2см)
29. стандарт очистки центробежным воздухоочистителем воздуха после вентилятора отсоса воздуха из под днища автомобиля
30. безопасность: колеса автомобиля защищены спереди, сзади от наезда на них колес другого автомобиля. Угол поворота управляемых колес показывает пилоту дисплей лобового стекла, светодиодные полосы сверху крыла или другой способ
31. боковые телекамеры заднего вида с дисплеем лобового стекла
32. судейский радиоканал пилотам обязателен. Территория соревнований компактно (продажа билетов на зрительские трибуны) возле города
33. радиосвязь с командой обязательна. Односторонняя телеметрия разрешена, двухсторонняя запрещена
34. запрет подогрева (включая шины) или охлаждения функциональных элементов автомобиля внешним искусственным источником энергии. Исключение: подогрев, охлаждение топлива
35. старт автомобилей через каждые 7сек (нет столкновений машин – защита бедных команд) с учетом на финише разницы времени старта
36. Формула ТГК это инженерная Формула, она не подчиняется допинг-контролю и международным спортивным организациям. Перед гонкой точность движений и время реакции гонщика проверяет врач
37. организационные расходы Формулы ТГК покрывают доходы организаторов от рекламы, другой деятельности
Нарушения: Суд антихристианской Формулы ТГК + участие обвиняемой стороны + участие 1 представителя от всех команд как присяжных. Неявка в Суд предупрежденной обвиняемой команды – замена ее общим адвокатом. В течение 7 дней по ходатайству обвиняемого приговор можно пересмотреть. Организационные вопросы решит Парламент Формулы ТГК, в котором 2 равноправных человека с каждой команды: 1 пилот, 1 инженер.
Запрещено участие в Парламентских голосованиях (но не в дебатах) лиц не входящих в Парламент: правила Формулы ТГК подчинены не преступному принципу технического равенства команд, а эволюции техники в направлении основной функции человечества: расселении человека по всей Галактике. В дебатах прав тот чей вариант выгоднее для ускорения развития технологий галактических колонистов.
Чем больше в организации крутится денег, больше ограничен доступ к информации, тем легче силовикам заменить интересы класса инженеров интересами класса силовиков. Минимум оборота денег, максимум открытости информации, иначе такая же катастрофа для инженеров как Формула 1.
Дешевизна Формулы ТГК увеличит число команд чемпионата мира: четвертьфиналы, полуфиналы, финалы (команды сразу показавшие хорошее время прохождения трассы в квалификации сразу в финале…). Международные антихристианские организации автоспорта в общей гонке «Кубок планеты» найдут лучшие команды, лучших пилотов Формулы ТГК.
Антихристианские организации – организации с системой безопасности от антигумманистических принципов Евангелия (учебник коммунистических террористов). Антихристианские организации работают по правилам:
АНТИХРИСТИАНСКИЙ КОДЕКС – защита от преступных антигумманистических принципов Христа, использование которых в работе карается организацией:
1. принцип изначальной виновности человека
2. принцип социального равенства людей вместо юридического и профессионального равноправия
3. принцип максимума оплачиваемого труда (христианская экономическая наука)
4. заповедь-2 Библии: нельзя никого и ничего любить
5. запрет профессиональной чести для Создателей – изобретателей, инженеров, рабочих
6. принцип не заботься о завтрашнем дне
7. принцип принуждения к коллективизации труда
8. принцип кто возвышает себя, тот унижен будет
9. принцип кто хочет быть первым между вами, да будет вам рабом
10. могут быть добавлены другие преступные принципы Библии по мере анализа её влияния на общество
1979г: владельцы команд, инженеры, пилоты послали в жопу силовиков Американского автоклуба USAC организовав Формулу CART: правила определяют владельцы команд, производители гоночной техники, пилоты. 20лет CART: нет серьезных изменений правил: F1 дважды меняла рабочий объем мотора, 8 раз массу автомобиля, ежемесячно требования. За победу в CART бились десятки пилотов, команд. В F1 2-3 пилота 1-2 команд. Силовики США мстили CART за отказ от спортивных силовиков: блокировали доступ в престижные трассы, вредили пока не убили за демократию.
В F1 много денег – трасса компактно (билеты) у города + в автомобиле реклама + оплата телетрансляции.
Гонки автороботов придут к запрету лидаров, радаров. Только 2 телекамеры + 2 инфракрасные телекамеры + софт. Финансировать выгоднее софт распознавания изображений, а не демаскирующие себя датчики.
Форумы: dzen.ru institutrobotov.ru/formula_1.odt – скачиваемый файл открывается с картинками в опен офис, без картинок в либре офис
53)
ИДЕАЛЬНЫЙ РУЛЬ F1: (статье 2 раза вредили) неподвижный, усеченный сверху белый матовый прямоугольник с ЖК-монитором с яркими контрастными цветными знаками, указателями + яркие контрастные цветные кнопки, цветные ручки поворотников с специальное насечкой на них позволяют пилоту тактильными ощущениями вслепую определить какую ручку крутит. Контрастная информация на белом фоне читается быстрее. Часть информации на фоне лимонного цвета.
Руль поворачивается на угол поворота передних колес. В крайнем правом (левом) положении руля он останавливается, но передние колеса продолжают поворачиваться вправо (влево) до включения ограничителя угла.
Руль имеет две вертикальные цилиндрические ручки: левый цилиндр для левой руки, правый цилиндр для правой руки. Каждый цилиндр разделен на передний, задний полуцилиндры.
Колебаниями в вертикальной оси-Y все полуцилиндры передают руке человека вертикальные колебания колеса по обратной связи с датчиком подвески колеса.
Правые, левые боковые колебания полуцилиндров ручек руля передают человеку вибрацией на стандартной частоте-1 (одинакова для боковых и продольных колебаний на всех полуцилиндрах руля) боковые силы (обратная связь с датчиками силы в подвеске) действующие на колесо. Больше амплитуда колебаний – больше сила действующая на колесо.
Продольные по движению автомобиля колебания полуцилиндров ручек руля на стандартной частоте-1 передают человеку продольные силы действующие на колесо. Больше амплитуда колебаний – больше сила действующая на колесо.
Пилот автомобиля знает о силе сцепления каждого колеса в каждом направлении с дорогой по вибрации полуцилиндров ручек руля.
Уровень, частоту, график вибрации полуцилиндров ручек руля пилот заранее устанавливает в компьютере автомобиля. Аналогичный руль должен быть в большинстве дорожных автомобилей
ОПЦИЯ: пилот двигает вбок руль с поворотом туда на равный угол передних, задних колес – весь автомобиль двигается вбок в том же направлении: 1,5 раз меньше время обгона автомобилей, меньше сопротивление воздуха при обгоне, не нужна 1,5 раз большая боковая сила в пятне контакта передних колес для вращения автомобиля в вертикальной оси центра оси задних колес.
Если в движении автомобиля повернуть руль влево, сдвинуть ось руля вправо – повернутся только задние колеса, сместится вправо задок автомобиля. Угол поворота каждого колеса автомобиля вычислит софт (4-кратное дублирование с голосованием процессоров). Амортизатор руля: транзисторная муфта демпфирует колебания руля. График демпфирования от софта
54)
АКТИВНАЯ ПОДВЕСКА: (статье 4 раза вредили) 1980г: конструктор Морис Филипп внедрил в Tyrrell 009 адаптивные гидроамортизаторы управляемые микропроцессором: отказалась команда из-за 2-х аварий.
Проблемы крена, клевков: подпрыгивая в неровностях асфальта автомобили с жесткой подвеской теряли граунд-эффект. 1981г: для защиты пилотов от пузырей в ладонях и мозготрясения от сверхжесткой подвески необходимой для граунд-эффекта, появился Lotus 88: боковые панели кузова свечной (как у мотоцикла спереди) пружинной подвеской крепят к неподрессоренным частям подвески колес автомобиля. Это сделало постоянным дорожный просвет боковых аэродинамических понтонов. Мягкая подвеска колес улучшила самочувствие пилотов.
Впервые в F1 в силовом корпусе автомобиля гибрид углепластика (внутри) с кевларом (снаружи) применил Lotus 88 (в McLaren MP4 без кевлара): разрушение конструкции – кевлар не дает острым осколкам углепластика рассыпаться по трассе, прокалывая шины. Сегодня это норма F1. У кевлара, углеволокна разница их скорости звука защищает пилота от вибраций.
1983г команда Lotus: Питер Райт внедрил активную подвеску с принудительным ходом подвески вниз и вверх гидроцилиндром с 4 клапанами. Для уменьшения мощности гидроцилиндру помогает пружина.
4 года потрачено на достижение линейности характеристики отрицательной обратной связи «ход датчика дорожного просвета – сила гидроцилиндра». Обратная связь вначале вызывала толчки ослабляющие граунд-эффект. 20 датчиков, 60 режимов работы компьютера подвески дали линейность.
По данным датчиков скорости автомобиля, динамического давления воздуха (трубка Пито), датчиков продольного и поперечного ускорения автомобиля, датчика угла поворота и угловой скорости руля, датчиков силы и скорости её роста и падения в педалях газа и тормоза, датчиков силы в гидроцилиндрах подвески и скорости её роста и падения, софт подвески обеспечивает одинаковый дорожный просвет в подвеске каждого колеса таблицами решений для реальной трассы. Таблицы решений реальных трасс отличались от универсальных эталонных таблиц решений небольшими процентными поправочными коэффициентами.
Гидроцилиндры обратной связью с датчиками дорожного просвета в подвеске держат постоянным дорожный просвет подвески каждого колеса. Сжатие пружины в наезде на неровность дороги обратная связь симулирует подъемом гидроцилиндром подвески вверх по сигналу датчика дорожного просвета и скорости роста силы в датчике силы гидроцилиндра.
Датчик силы меряет давление масла в гидроцилиндре: скорость роста силы – по скорости роста давления масла. Больше скорость роста силы в гидроцилиндре – больше ускорение открытия клапана гидроцилиндра – быстрее ход подвески вверх.
Через отрицательную обратную связь «ускорение автомобиля – эталонная сила» софт клапанами гидроцилиндра уравнивает с эталонной силу в датчике силы гидроцилиндра. В диапазоне колебаний подвески > 0,6Hz эталонная сила прогрессивно растет при уменьшении цифры датчика дорожного просвета.
В диапазоне 0-0,6Hz эталонная сила линейно растет при уменьшении цифры датчика дорожного просвета. При торможении автомобиля софт по цифрам датчиков увеличивает силу гидроцилиндров подвески передних колес. При разгоне софт по цифрам датчиков увеличивает силу гидроцилиндров подвески задних колес. Софт заранее управляет клапанами гидроцилиндров по цифрам датчиков не дожидаясь крена, клевка машины.
Автомобиль Лотус 92 стартовал в 1983г в Рио, неудачно. 2-й выход: Лотус 99Т в 1987г. Активная подвеска снижала износ шин, позволив Айртону Сенне отказом от пит-стопа победить 1987г в маневренных гонках Монако и Детройта – последние победы команды Lotus: 1994г после запрета активной подвески самая легендарная в инженерии команда Формулы 1 обанкротилась.
Активная подвеска автомобиля Lotus на 12кг тяжелее обычной, берет до 15-20л.с. мощности мотора.
1987г: активную подвеску с принудительным ходом подвески только вниз применили Френк Дерни, Боб Питчерт (фирма AP), команда Вильямс (Williams). Для уменьшения мощности гидроцилиндру помогает пружина. Принцип работы одинаков с Lotus, нет силового хода гидроцилиндра вверх, 2 клапана гидроцилиндра вместо 4. Вместо силового хода вверх гидроцилиндр работает как амортизатор: дроссельный клапан с регулируемым компьютером сечением.
5 лет доводки активной подвески Williams: вес на 33% меньше чем Lotus, на 20% меньше неподрессоренный вес, расход мощности не более 10-15л.с. С активной подвеской Williams 1992г победил все команды с превосходством, какое не имел никто и никогда.
Безопасность гонок обратно пропорциональна усталости пилота. Активная подвеска упростила, удешевила настройку автомобиля к трассе; уменьшила нагрузку и затраты на шины; уменьшила усталость пилота; повысила безопасность гонок; увеличила (удешевив затраты) ресурс карданных валов, двигателя, коробки передач, сцепления.
Софт активной подвески менял настройки подвески по состоянию дороги, износу шин, изменению развесовки по осям, давления в шинах. Шинные компании добились запрета активной подвески, противобуксовочной, антиблокировочной систем, электронного дифференциала, электроники как угрозы прибылям.
Колеса моего универсального спортивного джипа GE2.0 на продольных рычагах (с торсионной подвеской) активной подвески с управляемым водителем на ходу дорожным просветом автомобиля. С продольным рычагом закреплена неподрессоренная ось продольного рычага. Продольный рычаг наклонен назад-вниз обычно на угол 45° для снятия шума, вибраций, облегчения работы амортизатора, снижения расхода топлива.
Ось продольного рычага неупруго соединена с осью амортизатора-электрогенератора для амортизации колебаний хода подвески колес с рекуперацией энергии колебаний. На ходу автомобиля электромотор механизмом меняет на ходу уровень прогрессивности подвески. При малом дорожном просвете (5см) прогрессивность высокая для жесткости подвески. При большом дорожном просвете (0,5 м) для плавности хода электромотор уменьшит прогрессивность меняя кинематику подвески.
Механизм я предлагал КБ завода ЗИЛ, где я работал. Послали подальше. 1999г: дважды ездил в АвтоВАЗ предлагая электромеханический активный стабилизатор поперечной устойчивости автомобиля. Послали подальше. 2003г: 1-й в мире серийный активный стабилизатор поперечной устойчивости в BMW-7.
4 троса привода (маховик + муфта сцепления + винт-гайка) идут через профильные полушкивы к рычагам подвески, управляя на ходу дорожным просветом автомобиля, углом крена. Небольшой автоматический крен внутрь поворота за счет уменьшения дорожного просвета с внутренней стороны поворота.
Большой диаметр колес увеличит высоту стабилизирующей оси автомобиля – линии, соединяющей центры колесных осей автомобиля. Центр масс автомобиля на стабилизирующей оси – автомобиль не наклоняется на повороте, выше – увеличивается расход топлива активным стабилизатором, ниже – автомобиль наклоняется в противоположную сторону.
Экономичность больше на узких колесах большого диаметра. Больше диаметр колеса – быстрее пройдет автомобиль повороты, быстрее тормозит на неровной или мокрой дороге, больше долговечность тормозов.
Момент инерции колеса по 3 осям минимально мешает движению колеса вверх при подвеске на продольном рычаге с осью вращения параллельной оси колеса – меньше шум колеса, меньше бьются подшипники, меньше вес подшипников. Идеал движения колеса: колесо идет вверх-назад по прямой под углом 45°: колесо в движении вверх уходит назад
ГРАУНД-ЭФФЕКТ: Williams разрабатывал противоперегрузочный костюм пилота F1 на 7g. Сеть надувных шлангов костюма сжимает тело пилота, не давая инерции двигать кровь в сосудах. Шланги электроклапаном через редуктор соединены к баллону с углекислотой. Датчики пожара + датчики ударных ускорений электроклапаном отключат противоперегрузочный костюм.
ФОРМУЛА ТРАНСФОРМЕР: гонки на небольшой кольцевой трассе с развитой инфраструктурой: трибуны, боксы для автомобилей, полосы безопасности, службы… Гонка начинается в шоссейном кольце с дорожным просветом 5см. Затем без остановки изменение дорожного просвета до 20см в ралли. Изменение дорожного просвета до 60см в триал
ФОРМУЛА МАХОВИК: двигатель, сцепление, коробку передач, рычажки на руле, кучу остального барахла заменит полностью запаянный снаружи стартер-генераторный кольцевой (в виде бублика) вакуумный маховик на магнитном подвесе, с дублирующими малоинерционными роликовыми подшипниками. Вывод крутящего момента через 2 провода на электромоторы. Тепло с герметичного корпуса супермаховика от обмотки статора идет на внешний радиатор с электровентилятором герметичной системы охлаждения через трубы с фреоном. Сверхдальние космические станции используют в качестве аккумулятора маховик
55) (статье 3 раза вредили) 1968г: занос задних колес от заклинивания алюминиевого поршня (перегрев) двигателя – погиб пилот автомобиля Honda в F1 от отсутствия обгонной муфты (как в велосипеде) главной передачи для защиты от заноса при заклинивании (или торможении) двигателя. Обгонная муфта с ее блокировкой для заднего хода.
Обгонная муфта упростит управление автомобилем, экономит 15% топлива, позволяет уменьшить обороты мотора перед поворотом не опасаясь заноса. Honda выиграла этапы гонок F1 1965, 1967г. Выиграла бы чемпионат применив обгонную муфту с блокировкой при заднем ходе. Обгонная муфта между коробкой передач, задним колесом: защита мотоцикла от заноса.
Алюминиевые поршни клинят: высокий коэффициент теплового расширения. Для поршня композитный карбид кремния с антифрикционным покрытием трущейся поверхности.
Конструкции с боралюминия на 40% легче углепластика. Боропластиковые конструкции вдвое легче конструкций с алюминиевых сплавов. Удельная прочность сжатия боропластика 4,3 раза больше углепластика. Прочность боропластика на сдвиг в единицу веса 3 раза больше, в растяжении на 10% больше углепластика.
Прочность на единицу веса в растяжении поперек волокон у боропластика 1,57 раза больше углепластика. Сила сцепления углеволокна с эпоксидными смолами в разы меньше чем у борволокна. Высокие значения прочности, жесткости борволокна, больший диаметр нити делают его перспективнее углеволокна. Борволокно химически устойчивее углеволокна: без значительного снижения свойств держит нагрев в атмосфере 500°С, в инертной среде 600-700°С.
Борволокно в катушке: $5000 – 1кг, углеродное нановолокно: $15000. Детали с аэрогеля с гелиевым наполнением и обмоткой нановолокном будут легче воздуха.
Дорог не бор, а технология: газофазное осаждение бора на вольфрамовую нить в автоклаве. Автоклавная роботизация технологии + создание на заводе крупногабаритной постоянно горячей теплоизолированной безлюдной зоны с регенерацией тепла, в которой работают только телеуправляемые высокотемпературные роботы, сотни раз снизят цену борволокна. Самолет с бором в качестве горючего в паре с кислородом воздуха пролетит 5 раз дальше самолета с горючим жидкий водород.
В тканевом углепластике чрезмерны поперечные волны (вибрации). Однонаправленные волокниты имеют в разы большую жесткость конструкции против тканных углепластиков. В углепластиках из ткани прочность углеволокна на 10-20% меньше, чем в углепластике с однонаправленными (волокниты) прямыми волокнами от ослабления углеволокна из-за малого радиуса изгиба плетения волокон в углеткани.
В углепластиковых деталях из ткани жесткость на 20-40% меньше, чем в деталях с однонаправленными (волокниты) прямыми углеволокнами. Углеволокно в катушке по весу вдвое дешевле углеткани. Мотать роботом деталь углеволокном с катушки втрое дешевле, чем делать эту деталь с углеткани.
Технология роботов, беспилотников, автомобилей: каркас – продырявленные соты – обложить на клею все углы полосками углеткани, на клею углеволокном обмотать роботом. Жарить в автоклаве. Продырявленные соты выполнят функцию пожаробезопасного топливного бака с пенополиуретановым заполнением. Аналогично у андроида Айзек.
Лучшим жестким наполнителем композитных силовых конструкций роботов был бы пенобор вместо авиапенопласта. Бор: рекордные параметры удельной жесткости на сжатие. Пенобор: спекаем в борсодержащем газе короткие 5-7мм борволокна в газофазном автоклаве: большие давление, температура
56)
АВТОМОБИЛЬ БУДУЩЕГО GE2.0: (статье 5 раз вредили) электромагнитные амортизаторы генерируют ток бортсети, работая обратной связью от датчиков ускорения как активная подвеска двухстороннего действия на продольном рычаге. Неподрессоренная ось продольного рычага соединена с шкивом большого диаметра. В шкиве закреплен трос, который крутит шкив меньшего диаметра на валу высокомоментного электродвигателя подвески.
Ветвь троса тянущую колесо автомобиля вверх, натягивает натяжной ролик. Электродвигатель подвески выполнит роль активной подвески. Электродвигатель подвески разгружает торсион. Перед наездом на большой скорости колеса на кирпич электродвигатель активной подвески по цифрам радиовысотомеров в концах переднего бампера поднимет колесо.
Это позволит водителю автомобиля GE2.0 проехав на 100км/ч по кирпичу не почувствовать этого. Если слишком резко поднять колесо перед кирпичом, подвеска толкнет автомобиль не вверх, а вниз. Софт подвески управляет процессом по установленной водителем модели обратной реакции автомобиля на внешнюю среду.
Бамперы с упругими роликами (ход их прогрессивной подвески 4см в продольном и поперечном направлениях) на концах не царапают машины. Боковая подвеска бампера амортизирует удары. Ролик катит по боковине кузова другого авто не повреждая.
Передний бампер выдвигается вперед тем больше, чем больше скорость (или больше скорость сближения с объектом по данным радиолокатора). При быстром приближении сзади автомобиля по данным заднего радиолокатора или торможении задний бампер выдвигается назад.
Выдвигающиеся (до 0,5м) при движении бамперы примерно вдвое увеличат скорость, при которой в столкновении погибают пассажиры. На стоянке бамперы зажимают передние, задние колеса, уменьшая длину автомобиля, работая как противоугонная система.
Активный бампер имеет 3 привода. Перед столкновением с пешеходом приводы максимально выдвигают бампер вперед-вниз (укладывая человека на капот) до минимального расстояния до дороги по двум радиовысотомерам в концах бампера. Перед столкновением бампер выдвигается в сторону столкновения с учетом скорости. В повороте приводы двигают бамперы вбок внутрь поворота.
Бампера с легко рихтуемого мягкого алюминия. Приводами бамперов управляет софт по данным радаров, спидометра, датчиков продольных, поперечных ускорений кузова.
В автомобиле GE2.0 боковые радары выдвигают боковые бамперы в дверях с стороны наезда автомобиля. Софт управляет приводами активных бамперов при перевороте автомобиля.
Нефтяной кризис 1973г: из-за падения управляемости США от избыточной конфликтности принят закон: бамперы держат без повреждений столкновения до 8км/ч. Уровень конфликтности в обществе закон сократил в разы как лучший автомобильный закон всех времен и народов.
Классу силовиков для перетягивания на себя финансового, политического одеяла необходим максимум управляемой конфликтности в гражданском обществе. Чтоб поднять уровень управляемой конфликтности в обществе отменили закон «бампер 8км/ч».
Моей разработки спортивный автомобиль GE2.0: вентилятор с приводом от отдельного двигателя, отсасывает воздух с днища. Компьютеризированная сегментная аэродинамическая юбка на продольных рычагах по периметру автомобиля. Нерычажные направляющие юбки запретит Закон (забиваются грязью). Зазор по защите от льда: «рычаг подвески юбки – детали днища» расстояние от 2см.
Закон потребует системы автоматического обогрева рычага подвески юбки, юбки для защиты от льда, сигнализацию водителю об обледенении. Закон запретит длину сегмента аэродинамической юбки с отдельной подвеской более 0,3м. Закон запретит юбки без радиовысотомерного поддержания постоянного зазора «дорога – сегмент юбки».
Частота реакции привода системы стабилизации зазора юбки не менее 6Hz с полной амплитудой. Системы стабилизации зазора юбки по Закону в случае ухудшения параметров в предельных режимах голосом предупреждают об процентной величине оставшейся величины вакуумного прижима авто к дороге.
Закон не требует плоского днища автомобиля: больше объем пространства под днищем – дольше воздух заполняет объем при отказе юбки – больше времени водителю на реакцию. Закон потребует траекторию движения юбки по прямой наклоненной снизу верх назад под углом 45° в пределах диапазона отклонений. Относится к передней, задней, к боковым аэродинамическим юбкам автомобиля. GE2.0: задняя юбка поднимается при равенстве давления перед юбкой, после нее.
Закон: при отсосе воздуха из под днища обязательна очистка воздуха от крупной пыли (циклон), снега, камней на выходе. Юбка с вентилятором работает при медленном движении в гололед: выше безопасность. При росте силы прижима шины к дороге в 2 раз сила трения растёт вдвое: закон Амонтона: боковое ускорение автомобиля в повороте в гололед растёт вдвое.
Моей фирме не нужна техподдержки по всему миру: в сайте видео: техпроцесс ремонта + чертежи.
В спортивном автомобиле мощный силовой гироскоп выровняет силу прижима всех 4 колёс на повороте: рост сцепления колёс в повороте. При разгоне крутящий момент силового гироскопа с поперечной горизонтальной осью выровняет силу прижима всех 4 колёс в быстром разгоне и резком торможении.
2 силовых гироскопа могут сменяя друг друга, часами непрерывно создавать стабильный гиромомент. Кратковременно силовым гироскопом может стать коленвала маховик с постоянными магнитами. Тормозят, ускоряют маховик коленвала обмотки его кожуха. В режиме торможения маховика снимаемая с его обмотки энергия идет электромоторам колёс.
Для постоянства расхода газа в заднем диффузоре автомобиля GE2.0 турбокомпрессор. Пока диффузору хватает газа для прижима автомобиля к трассе клапан-С закрывает вход компрессора. Создавая в центробежном компрессоре вакуум. Чтоб компрессор не брал энергию от турбины, не увеличивал газовое сопротивление выхлопу.
Как только газа для диффузора становится меньше открывается клапан-С. Добавляя в диффузор воздух вместо выхлопных газов. Обратная связь клапана-С с датчиком давления даст постоянство разрежения диффузора автомобиля
57)
СИСТЕМА КУРСОВОЙ УСТОЙЧИВОСТИ: (статье 3 раза вредили) Система Курсовой Устойчивости – СКУ автомобиля GE2.0 имеет 4 датчиковых канала угла поворота, угловой скорости разворота автомобиля: поворота автомобиля от вертикали поворота.
Вертикаль поворота это ось, проходящая в автомобиле через Точку нулевой окружной скорости в повороте относительно среднего угла продольной оси автомобиля за последние 4сек (по крайним точкам). Точку нулевой окружной скорости обычно на вертикали проходящей через центр задней оси.
Автомобиль с избыточной поворачиваемостью требует максимального момента-1 инерции автомобиля в вертикальной оси проходящей через центр задней оси для устойчивого разгона, торможения в повороте. Максимум момент-1 инерции достигают разнесением агрегатов автомобилей ближе к переднему бамперу.
3 сенсорных канала: 3-кратно дублированный 3D-гироскоп черного ящика автомобиля. В поездке автомобилист ручкой управления СКУ уточнит угол разворота автомобиля, в котором сработает Система Курсовой Устойчивости автомобиля – СКУ. Это ограничит вмешательство СКУ в действия водителя.
Другой ручкой управления СКУ водитель на ходу установит в компьютере автомобиля максимум угловой скорости разрешенный СКУ: защита от резких рывков. Канал-4 СКУ работает по разнице угловых скоростей колес автомобиля. Гироскоп корректирует показания датчиков угловых скоростей колес для уточнения пробега автомобиля.
СКУ в работе определит момент начала скольжения каждого из 4 колес по уменьшению частоты, амплитуды вибраций тензометрических датчиков силы рычагов рулевой трапеции (2 датчика), тензометрических датчиков силы рычагов подвески задних колес (2 датчика).
При активном автоматическом подруливании при заносе СКУ крутит руль в сторону заноса медленно, обратно возвращает быстро. В СКУ постоянно включен режим «торможение». При чрезмерно малом ускорении таймер газа отключит противобуксовочную систему, несколько секунд постепенно уменьшает точность выдерживания угла разворота автомобиля.
В черном ящике автомобиля 3D-датчик ускорения. По его данным навигатор автомобиля непрерывно определяет высоту автомобиля над уровнем моря, все параметры движения при столкновении.
Пьезогироскоп управляет продольным углом заноса автомобиля: занос задних колес их пробуксовкой, занос передних колес их торможением. Управляемый занос от СКУ: вращение до вхождения в угловой допуск расчетного угла-1 заноса. Прекращается пробуксовка, тормозной момент. Остаточный занос до конечного угла заноса – таблицей решений: «угловая скорость – сцепление колес – угол разворота от заноса».
Таблицы решений рассматривают все варианты расположения центра масс (справа-слева, спереди-сзади), нагрузки от датчиков веса подвесок колес. Сцепление колес измерят датчики крутящего момента.
Если из-за ямы переднее колесо автомобиля провалится – СКУ резко добавит газу в задние колеса чтоб подняв передок машины вытащить с ямы переднее колесо. С помощью резкой тяги на одно заднее колесо или резкого торможения на одно переднее колесо СКУ без удара объезжает ямы, участки льда. Зимний режим включает термометр.
В СКУ функция разгона (прижим задних колес), торможения (прижим передних колес) в повороте для выравнивания прижима колес. СКУ на повороте заносом выровняет нагрузки на передние, задние колеса автомобиля. На спуске СКУ выровняет автомобиль торможением отдельных колес, ограничит скорость.
После столкновения СКУ по сигналу 3D-пьезогироскопа автоматически выключит «массу» автомобиля. Софту быстродействующей СКУ хватает всего 1 колеса чтоб полностью управлять автомобилем: допустим в автомобиле на дороге скользят или оторвались от дороги 3 колеса, кроме правого (левого) заднего.
Оставшимся колесом софт СКУ поворачивает автомобиль налево добавив газу или поворачивает направо притормозив. Меняя отношение ускоряющего, тормозного ускорений СКУ управляет ориентацией продольной оси автомобиля.
СКУ тормозит юзом 1 колесом, предварительно совместив в одной линии с вектором движения автомобиля его центр масс и пятно контакта колеса. СКУ прямо разгонит 1 колесом автомобиль, предварительно торможением совместив в одной линии пятно контакта колеса с центром масс автомобиля, чередуя плавный разгон с резким торможением юзом.
При этом автомобиль на дороге все время повернут немного вправо. На каждое колесо действует продольная + боковая силы. На 4 колеса это 8 цифр. По 8 цифрам сил действующих на каждое колесо софт управляет мощность двигателя, удерживая автомобиль в повороте
ПРОТИВОБУКСОВОЧНАЯ СИСТЕМА
Колесиком на руле водитель установит процентную пробуксовку колес. При 100% исчезает проблема неуправляемости автомобиля на снежном покрове и некоторых других скользких покрытиях
58)
АЛГОРИТМ КОШАКА
Джип GE2.0 имеет на колеса роботизированную подвеску «кошак» с дополнительным рычагом, позволяющим выдвигать передние колеса вперед, задние колеса назад. Переезжая через большое бревно, яму джип выдвигает вперед одно переднее колесо. Оно переезжает бревно или переносится через яму. Затем аналогично другое переднее колесо. Аналогично поочередно переезжают через препятствие, переносятся через яму задние колеса. Через 4 года после появления здесь этот алгоритм использовали американцы для передвижения 4-колесного робота по лестнице
АЛГОРИТМ ПАРКОВКА ВБОК
Подъехав к своей стоянке между 2 машинами автомобиль по диагонали-1 приподнимает 2 колеса, передвигает их вбок на 5см. Диагональное колесо с стороны парковки приподнимается на полсекунды позже. Опираясь на эти колеса автомобиль по диагонали-2 поднимает другие 2 колеса, передвигает их вбок на 5см. Шагая вбок автомобиль под управлением софта с инфракрасными (ультразвуковыми) датчиками протискивается вбок в пространство между 2 машинами на стоянке, занимает место между ними
ЗАЩИТА ОТ АНТИРАДАРА
(статье 3 раза вредили) спецслужбы, преступники будут генерировать антирадаром ложные импульсы радарного круиз-контроля для предумышленного столкновения машин. Защита от столкновений моей фирмы GE2.0: защищенный от предумышленных помех автомобильный радар с перестройкой частоты от генератора случайных чисел. Радар определит расстояние до машины впереди цугом из 3 импульсов.
Сигнал радара защищен динамическим шифрованием отношения расстояний между импульсами. За доплату: версия радара с изменением не только отношения расстояний между импульсами в измерительном цуге, но и раздельным выбором генератором случайных чисел частоты каждого импульса в цуге.
Радар непрерывно излучает белый шум, в котором спрятаны 3 импульса измерительного цуга. При попытке заглушить измерительный цуг с 3 импульсами радар издает водителю звуковой сигнал и, по сигналам 2-х приемников излучения по бокам автомобиля, показывает в дисплее (от телекамеры) лобового стекла обведенный цветной линией внешний контур зловредного автомобиля. Круиз-контроль определит тормозной путь по среднему ускорению колеса от датчиков антиблокировочной, противобуксовочной систем
Выросла вероятность предумышленных киберкатастроф автомобилей через интернет-доступ к их системам. Вырастет спрос на киберзащиту (автомобильный антивирус) автомобилей, спрос на автомобили недоступные беспроводным сетям. Децентрализация систем, 4-кратное дублирование с разными принципами действия снизит вероятность предумышленных киберкатастроф автомобилей.(этот абзац 3 раза убирали с этой статьи) При движении для любого автомобиля вероятность доступа к системам автомобиля через любые волны должна быть равна нулю
АДАПТИВНЫЙ РУЛЬ
(статье 6 раз вредили) сигнал мозга к ноге идет с скоростью 90м/с вдвое дольше, чем до руки, поэтому ножные педали газ, тормоз – на свалку. Под ногами водителя пустое пространство, куда водитель после магазина закинет мешок картошки.
Педали в моем автомобиле GE2.0 заменит тензометрический руль, похожий на руль Формулы 1. В нерабочем положении руль автоматически утапливается в переднюю панель. Через середину руля проходит виртуальная тензометрическая горизонтальная ось поворота руля от кистей рук: «газ – тормоз».
На концах оси вертикальные ручки, которые подгонит вверх-вниз под себя водитель. Результат подгонки остается в компьютере. Кисти поворачивают руль верхней частью вперед – тензометрический сигнал пропорционального ускорения автомобиля. Кисти поворачивают руль нижней частью вперед – тензометрический сигнал пропорционального торможения.
Тензометрическое (без движения руки) управление не засоряет мозг сигналом об угле поворота руля вокруг оси управления «газ – тормоз». Нажал на газ (тормоз) – включится постоянное ускорение (торможение) автомобиля пропорционально максимуму силы нажима.
Это ускорения можно уменьшить только нажав с соответствующим усилием на тормоз. Эта система управления автомобилем обратной связью «газ – датчик ускорения» автомобиля дает ему сверхплавное ускорение, уберет рывки.
Тензометрическая система управления «газ-тормоз» 4-кратно дублирована с системой голосования дублирующих каналов, с системой алгоритмической оценки достоверности каждого дублирующего канала управления «газ – тормоз» по показаниям других групп датчиков. Руль поворачивается на угол поворота передних колес чтоб знать угол поворота колес.
На скорости степень усиления руля падает. В движении водитель без поворота руля поворачивает левую, правую ручки руля вправо – с поворотом на равный угол передних, задних колес весь автомобиль двигается вбок в том же направлении. Аналогично вбок влево.
Угол поворота каждого колеса автомобиля вычислит компьютер с 4-кратным дублированием, голосованием процессоров. GE2.0 городской автомобиль: все его колеса поворачивают на угол 90° за счет поворачивающихся вбок (мое изобретение) продольных рычагов подвески. Автомобиль паркуется просто въезжая боком на угол 90° между припаркованными автомобилями.
Суперкары перейдут на управление движением вбок всеми 4 колесами: в 1,5 раз меньше время обгона автомобилей: не требуется вдвое большая боковая сила в пятне контакта передних колес для перемещения не только центра масс суперкара, но и вращения суперкара в вертикальной оси центра оси задних колес; меньше сопротивление воздуха в обгоне.
В обгоне требуется сначала вращение автомобиля против часовой стрелки (взгляд сверху), затем по часовой стрелке. Это удваивает боковую силу пятна контакта передних колес. Если левой рукой двинуть руль на себя, а правой рукой от себя – включатся левые поворотники: световые сигналы. Если правой рукой двинуть руль на себя, левой от себя: включатся правые поворотники, выключатся левые. Если обеими руками двинуть руль от себя или на себя: включится звуковой сигнал, фары, габаритные огни.
В ручках руля 4 адаптивных сегмента: 2 между рулем и передними колесами симулируют силу на 2 передних колесах + 2 между рулем и водителем симулируют силу на 2 задних колесах.
Каждый адаптивный сегмент руля имеет 3 пьезоизлучателя: один симулирует вертикальное ускорение колеса, другой продольное горизонтальное ускорение колеса, 3-й симулирует поперечное горизонтальное ускорение колеса.
По амплитуде, частоте вибрации адаптивных сегментов руля водитель точно чувствует грань срыва (силу сцепления) в занос, в блокировку, в пробуксовку любого из колес автомобиля, предугадывая снос в повороте.
Уровень, тип, график вибрации сегментов руля водитель установит на мониторе компьютера над лобовым стеклом автомобиля. На рычагах подвески каждого из 4 колес автомобиля 3 тензодатчика силы (3-кратно дублированы). 3 тензодатчика силы дают 3 сигнала: вертикальное ускорение колеса gH, его продольное горизонтальное ускорение gS, поперечное горизонтальное ускорение колеса gL
12 каналов обратной связи от 4 колес:
gS1 канал обратной связи передает вибрацией адаптивного сегмента руля левой кисти на руле продольное горизонтальное ускорение левого переднего колеса.
gH1 канал обратной связи передает вибрацией левой кисти на руле вертикальное ускорение левого переднего колеса.
gL1 канал обратной связи передает вибрацией левой кисти на руле поперечное горизонтальное ускорение левого переднего колеса.
gS2 канал обратной связи передает вибрацией правой кисти на руле продольное горизонтальное ускорение правого переднего колеса.
gH2 канал обратной связи передает вибрацией правой кисти на руле вертикальное ускорение правого переднего колеса.
gL2 канал обратной связи передает вибрацией правой кисти на руле поперечное горизонтальное ускорение правого переднего колеса.
gS3 канал обратной связи передает вибрацией левой кисти на руле продольное горизонтальное ускорение левого заднего колеса.
gH3 канал обратной связи передает вибрацией левой кисти на руле вертикальное ускорение левого заднего колеса.
gL3 канал обратной связи передает вибрацией левой кисти на руле поперечное горизонтальное ускорение левого заднего колеса.
gS4 канал обратной связи передает вибрацией правой кисти на руле продольное горизонтальное ускорение правого заднего колеса.
gH4 канал обратной связи передает вибрацией правой кисти на руле вертикальное ускорение правого заднего колеса.
gL4 канал обратной связи передает вибрацией правой кисти на руле поперечное горизонтальное ускорение правого заднего колеса.
На левой стороне руля автомобиля 2 адаптивных сегмента: передний адаптивный сегмент-1 руля с стороны передних колес. И задний адаптивный сегмент-3 руля с стороны водителя автомобиля.
Сегмент-1 вибрацией направленной вперед-назад передает левой кисти канал обратной связи gS1.
Сегмент-1 вибрацией направленной верх-вниз передает левой кисти канал обратной связи gH1.
Сегмент-1 вибрацией направленной вправо-влево передает левой кисти канал обратной связи gL1.
Сегмент-3 вибрацией направленной вперед-назад передает левой кисти канал обратной связи gS3.
Сегмент-3 вибрацией направленной верх-вниз передает левой кисти канал обратной связи gH3.
Сегмент-3 вибрацией направленной вправо-влево передает левой кисти канал обратной связи gL3.
Аналогично работают адаптивные сегменты правой ручки руля.
Компьютер разностью сигналов gL1, gL2 симулирует обратную связь руля. Водитель выберет в компьютере симуляцию отрицательного, положительного плеча обкатки передних колес, величину плеча обкатки каждого переднего колеса, выберет частотную характеристику обратной связи руля.
На основе 12 датчиковых сигналов компьютер дает сигналы антиблокировочной, противобуксовочной, другим системам. Каждый адаптивный сегмент руля имеет 3 пьезоизлучателя: один симулирует вертикальное ускорение колеса, другой продольное горизонтальное ускорение колеса, 3-й симулирует поперечное горизонтальное ускорение колеса.
Сигналы на 3 пьезоизлучателя адаптивного сегмента руля идут с 3 датчиков через 3 электроусилителя сигналов обратной связи. Водитель общей ручкой уровня усиления обратной связи «колеса – руль» устанавливает комфортный уровень обратной связи от нуля до максимума в зависимости от дорожного покрытия. Это делает и софт по эталонам неравномерности сигналов датчиков.
При разном износе шин софт меняет баланс электроусилителей, увеличивая уровень усиления обратной связи от колеса с более изношенной резиной. Софт установит баланс электроусилителей обратной связи передних, задних колес. В компьютере автомобиля водитель настроит частотные характеристики электроусилителей обратной связи. Наибольший эффект адаптивный руль дает спортивным автомобилям.
Амортизатор руля: транзисторная муфта демпфирует колебания руля. График демпфирования выберет софт.
Педаль автомобиля: тензометрическая (4-кратно дублированные тензометры) электронная педаль газ белого цвета, хорошо видная в темноте. Горизонтальная ось поворота педали в центре педали. Нажал носком ступни верхнюю половину педали: газ. Нажал пяткой ступни нижнюю половину педали: тормоз.
Регулировка высоты нижнего упора педали. Выбор водителем в мониторе компьютера характеристики «сила нажатия педали газа – мощность» чтоб на светофорах автомобиль не дергался
59)
МОТОР: (статье 8 раз вредили) для экологии, КПД: низкооборотный (полное сгорание сажевых частиц) одноцилиндровый (гибридная маховичная технология) нижнеклапанный (для компактности) форкамерно-факельный (для многотопливности) двигатель большого рабочего объема с полуаддиабатным охлаждением: минимальное (по ресурсу двигателя) воздушное охлаждение с перепуском части воздуха турбокомпрессора после радиатора «воздух-воздух» в закрытую рубашку воздушного охлаждения цилиндра, днища поршня через воздуховоды пустотелых коленвалов, шатунов + утилизация тепла выхлопных газов в герметичном паротурбогенераторе (вакуум в конденсаторе + весь генератор, включая его обмотку, в гермоотсеке паротурбогенератора).
В камеру сгорания двигателя идет часть горячего воздуха, прошедшего систему полуадиабатного охлаждения двигателя = полнота сгорания при низких температурах, меньше суммарное сопротивление воздушных фильтров.
Теплоизолированная внешняя стенка системы охлаждения цилиндра ускорит низкотемпературный пуск двигателя, снизит потерю топлива на прогрев. Для быстрого прогрева двигателя расход воздуха системы охлаждения двигателя в обратной связи с датчиками температуры цилиндра.
Охлаждение: цикл Брайтона: воздух турбокомпрессора через интеркулер идет в рубашку охлаждения двигателя. Рубашка охлаждения двигателя играет роль камеры сгорания в цикле Брайтона: нагрев воздуха крутит турбину. Турбина с компрессором – тепловой двигатель холостого хода. Не нужны 3% топлива на охлаждение, топливо на кондиционер.
Одноцилиндровый автомобиль легче, мощнее, экологичнее, дешевле, компактнее при равном расходе топлива, вместимости дорожного автомобиля. Стоимость жизненного цикла меньше. За эту разницу денег: автомобиль из более легких, долговечных материалов.
Низкооборотный двигатель заводится лучше: у высокооборотного двигателя зазор «поршень – цилиндр» рассчитан только на высокие обороты. Декомпрессионный механизм клапанов для запуска стартером одноцилиндрового двигателя. У двигателя 1 цилиндр с 2 противоположно вращающимися коленвалами с противовесами (их вес равен весу поршня + вес шатунов = полная уравновешенность) и 2 шатунами (нет бокового трения, износа поршней, цилиндра: экономия топлива 12%).
В качестве противовесов постоянные магниты в коленвале + обмотки статора в картере двигателя. Обмотки статора включаются на бортовую сеть автомобиля в такой нумерации обмоток и уровне снятия электроэнергии с коленвала, что плавность вращения одноцилиндрового двигателя лучше 12-цилиндрового.
Одноцилиндровый полуадиабатный низкооборотный двигатель большого рабочего объема набирает мощность быстрее высокооборотного многоцилиндрового форсированного такой же мощности. Полуадиабатный двигатель форкамерно-факельный на сверхбедной смеси. Форкамера выстреливает горящий факел над поршнем перпендикулярно его оси движения для максимума длины пути факела в сжатом воздухе.
На частичных нагрузках рабочий ход поршня сменяют бестопливные обороты коленвала. Безинерционный турбокомпрессор постоянной частоты вращения с дожиганием воздуха после поршня, с дросселированием входа компрессора, перепуском части отработавших газов в обход турбины.
Мала нагрузка коленвала – расход воздуха уменьшит дроссель входа компрессора + перепуск части газа клапаном мимо турбины. Частичный вакуум на входе в центробежный компрессор уменьшит расход мощности турбины на вращение компрессора для сохранения постоянных оборотов. При быстром росте нагрузки нет дросселирования входа компрессора, турбины.
Сильфонная подвеска турбокомпрессора. Турбокомпрессор имеет роликоподшипники с упругими углепластиковыми трубчатыми роликами. Их диаметр равен диаметру компрессора.
У турбины, коленвала всегда постоянные обороты с переменным расходом рабочего тела. Меняем только момент вала турбины, расход воздуха компрессора: мощность двигателя набирается мгновенно. Меняем период, частоту передачи транзисторной муфтой сцепления нагрузки на колеса автомобиля без коробки передач – не нужна: прямой привод двигателем через транзисторную муфту сцепления.
Двигатель не влез в моторный отсек: овально-прямоугольный поршень. Роликовые (трубчатые ролики) подшипники коленвала, валу турбонагнетателя
РАСПРЕДВАЛ
В клапанном механизме распредвала автомобиля GE2.0 Система Регулирования Силы – СРС сжатия пружин клапанов газораспределительного механизма снижает затрату топлива распредвалом.
На небольших оборотах газопривод (турбина + винт-гайка или поршень) или электропривод СРС установит малую силу пружин клапанов газораспределительного механизма.
При повышении оборотов распредвала привод СРС плавно увеличит силу сжатия пружин клапанов. Привод действует на пружину через прогрессивный механизм, как в задней подвеске кроссовых мотоциклов для постоянства крутящего момента, толкающей силы в двигателе привода СРС.
При подходе к ВМТ софт сдвигом фаз распредвала уравняет давление воздуха над поршнем с силой инерции поршня для уменьшения трения в поршневом пальце, в коленвале.
В джипе привод на передние колеса от 2-х электромоторов: ток с генератора на валу турбокомпрессора. Полное дожигание в выхлопном патрубке до турбины турбокомпрессора. В влажном, разреженном (датчики) воздухе или при необходимости поднять мощность электроцепи автомобиля в выхлопной патрубок до турбины инжектор впрыскивает топливо.
Для уменьшения расхода топлива избавляемся от топливной нефтеперерабатывающей промышленности переходом к гибридным многотопливным газотурбинным двигателям с постоянной (нет малого КПД на частичных нагрузках) частотой вращения на любых нагрузках.
С постоянной частотой вращения идеально работает противофазный глушитель двигателя, делая газотурбинный двигатель бесшумным: противофазный глушитель обратной связью микрофона с приводами регулирует на всех гармониках резонансные объемы глушителя.
На частичной нагрузке дросселируем вход в компрессор (уменьшение массы воздуха в компрессоре), выход газа с камеры сгорания в сопловом аппарате турбины.
Судовые газотурбинные двигатели обогнали (Роллс-Ройс) по КПД судовые дизельные двигатели: поршневые двигатели обречены на вымирание. С ними вымрут нефтеперерабатывающая промышленность, производство смазочного масла с присадками с всей их разветвленной инфраструктурой, что усилит военную, экологическую безопасность страны.
В газотурбинных двигателях вместо жидкой смазки твердая + роликоподшипники диаметром больше компрессора для выравнивания ресурса турбины, роликоподшипников. В роликоподшипниках трубчатые упругие ролики. Эту мою статью постоянно вырезают, заменяют чужой статьей в этом сайте, в моем компьютере, в моей флешке через несколько часов после публикации в сайте.
1983г: Пентагон не принял адиабатный (неохлаждаемый) дизель с КПД 52% военных грузовиков: ресурс 200ч. Пентагон требовал 3000ч. Проблему решает уменьшение оборотов двигателя в 5раз, увеличение в 5 раз рабочего объёма двигателя + введение воздушного охлаждения двигателя до ресурса 3000ч + уменьшение числа цилиндров до одного + сверхкороткоходный (габариты двигателя, поверхность трения) поршень с воздушным охлаждением днища с 2 коленвалами противоположного вражения + 2 шатуна на поршень = нет бокового давления поршня на цилиндр, расход топлива уменьшится на 12%
АМОРТИЗАТОР ИДЕАЛЬНОЙ ПОДВЕСКИ
Идеальная подвеска работает по принципу «сила в пятне контакта шины постоянна чтоб колесо не летало над асфальтом». Для этого:
1. в нижней мертвой точке движения подвески амортизатор должен работать по принципу «чем меньше скорость подвески, тем больше демпфирующая сила амортизатора». Этому принципу соответствует фрикционный амортизатор
2. при ходе подвески вверх колебания демпфировать должен не столько амортизатор, сколько коэффициент прогрессивности, тщательно подобранный по принципу максимального демпфирования резонансной частоты раскачки вверх-вниз автомобиля. Коэффициент прогрессивности показывает на сколько быстрее хода подвески должна расти противодействующая ходу вверх сила рычажно-пружинного механизма прогрессивной подвески. В прогрессивной подвеске эта сила растет нелинейно, быстрее чем ход подвески вверх. Этому требованию соответствует фрикционный амортизатор
3. в верхней мертвой точке движения подвески сопротивление амортизатора должно быть равно нулю. Этому требованию соответствует фрикционный амортизатор с обгонной муфтой (как у велосипеда). В нижней мертвой точке подвески обгонная муфта не отключает амортизатор. При любых движениях подвески вал обгонной муфты всегда вращается только в одну сторону, что позволяет электрогенератором или другим устройством регенерировать энергию колебаний подвески
4. при ходе подвески вниз амортизатор должен быть отключен чтоб колесо не летало над асфальтом. Этому требованию соответствует фрикционный амортизатор с обгонной муфтой. Электронно-управляемый фрикционный амортизатор имеет рычажный механизм с электромагнитом, который сжимает диски при подаче транзистором тока в обмотку. Амортизатор: подвижный шток амортизатора – ротор линейного генератора из магнитов. Неподвижный цилиндр это статор линейного генератора с кольцевыми обмотками, соединенные последовательно с транзисторами, конденсаторами. Меняя частоту, длительность закорачивания обмоток транзисторами меняют сопротивление амортизатора
РОБОКРЕСЛО АВТОМОБИЛЯ
(статье 3 раза вредили) человек сел в автомобиль. Кресло имеет раму подушки соединенной шарниром с рамой спинки. Привод винт-гайка установит угол «рама подушки – рама спинки кресла». Рама подушки: 4 вертикальных шарнирных рычага длиной 5см, шириной 20см.
Нижние оси вертикальных рычагов закреплены в раме подушки. К верхним осям вертикальных рычагов шарнирно соединены задними концами продольные шарнирные рычаги длиной 7см, шириной 20см. На верхней части продольных рычагов упругий пеноматериал с сетью сдвоенного шланга кондиционера. Шланг-1 подает сжатый терморегулируемый воздух от компрессора в подушку кресла. Шланг-2 откачивает пары пота с подушки кресла.
Продольные рычаги рамы подушки шарнирно соединены цепью друг с другом. Продольные рычаги рамы подушки через дополнительный продольный рычаг-5 длиной 7см соединены с задней частью рамы подушки кресла.
Сдвоенный шланг кондиционера идет с рамы подушки через продольный рычаг-5 подушки кресла. Сбоку справа, слева каждого продольного рычага в нем закреплены оси поперечных рычагов шириной 7см, длиной 7см. К поперечным рычагам на шарнирах соединены цепями несколько таких же поперечных рычагов. Аналогичные поперечные цепные рычаги на всех продольных рычагах рамы подушки кресла. На всех продольных, поперечных цепных рычагах упругий пеноматериал с сетью сдвоенного шланга кондиционера.
Маховично-тросовый привод управляет 3D-формой подушки кресла тросами на шкивах всех цепных рычагов. Самый большой диаметр имеют тросовые шкивы поперечного цепного рычага-1. Меньше у рычага-2. Самый малый диаметр шкива у последнего, на свободном конце цепи, рычага. Аналогично на большинстве цепных рычагов. Число тросов на 1 больше числа цепных рычагов.
Общий возвратный трос соединен с рычагами через полиспаст или балансирный механизм. Можно обойтись 2-мя тросами, если отказаться от раздельной компьютерной установки силы включающей каждый датчик силы в отдельности.
Рама спинки кресла имеет 9 горизонтальных шарнирных рычагов длиной 7см. Задние шарниры горизонтальных рычагов соединены с рамой спинки кресла. С передними шарнирами горизонтальных рычагов соединены шарнирами вертикальные шарнирные рычаги спинки кресла.
Вертикальные шарнирные рычаги спинки кресла соединены цепью между собой и с вертикальным шарнирным рычагом-10 длиной 7см. Вертикальный шарнирный рычаг-10 соединен шарниром с нижней частью спинки кресла. Сбоку справа, слева каждого вертикального рычага в нем закреплены оси поперечных рычагов шириной 7см, длиной 7см.
К поперечным рычагам спинки кресла на шарнирах соединены цепью несколько таких же поперечных цепных рычагов. На всех вертикальных, поперечных цепных рычагах спинки кресла шкивы с тросами привода, упругий пеноматериал с сетью сдвоенного шланга кондиционера.
Маховично-тросовый привод под подушкой кресла управляет тросами 3D-формой спинки, 3D-формой подушки кресла. Все цепные рычаги, участвующие в формировании 3D-поверхностей подушки, спинки кресла, имеют тензометрические датчики силы с обратной связью с приводом, соединенные общей цифровой шиной с компьютером кресла.
Каждый тензометрический датчик силы с обратной связью с приводом настроен на постоянную силу «человек – поверхность кресла», работает непрерывно. Тросовый привод обратной связью датчика силы держит постоянной силу человека на любом цепном рычаге.
Пользователь установит параметры обратной связи «датчик силы – привод». При наклоне человека вперед вместе с ним наклонится вперед спинка, поддерживая постоянной силу человека на каждом цепном рычаге в отдельности. Поперечные цепные рычаги подушки кресла обхватывают бедра человека: надежная опора в повороте. Поперечные цепные рычаги спинки кресла обхватывают сбоку справа, слева туловище человека под руками, трицепсы плеч: надежная опора в повороте.
При наклоне человека вбок в любую сторону цепное кресло не ограничит подвижность человека в кресле благодаря непрерывной работе тензодатчиков обратной связи.
Сверху спинки кресла 5 вертикальных цепных рычага активного подголовника: рычаги имеют длину 5см, ширину 5см. К каждому вертикальному цепному рычагу активного подголовника шарнирно соединены сбоку справа, слева по 3 поперечных цепных рычагов длиной 5см, шириной 5см.
К цепным рычагам активного подголовника кресла идут тросы с коробки маховично-тросового привода под подушкой кресла. Цепные рычаги активного подголовника имеют тензометрические датчики силы с обратной связью с приводом на всех рычагах.
На повороте цепные рычаги поддерживают голову человека: надежная опора голове в поворотах, при ударе в автомобиль сзади. При отсутствии нагрузок от автомобиля на голову вместо датчиков силы работают инфракрасные дальномеры, поддерживая обратной связью с приводом постоянное расстояние 0,5см «рычаг – голова».
Цепные рычаги активного подголовника в инфракрасном режиме не ограничат подвижность головы. В режимах «удар сзади», «удар сбоку» работа привода активного подголовника превращает цепной подголовник в амортизирующую конструкцию с заданным софтом законом замедления, защищая мозг от сотрясения, шею от перелома.
Режим подголовника «удар сзади» включает сигнал заднего радара при слишком быстро приближающемся сзади автомобиле: таблицы решений «вектор – расстояние – скорость». Справа, слева от подголовника на спинке кресла дополнительные 5 верхних плечевых цепных рычагов (длина 5см, ширина 5см) зажимают плечи сверху: защита от переворота автомобиля.
В начале движения автомобиля из передней панели на 2 манипуляторах выходит адаптивная твердая цепная рычажная подушка безопасности. Каждый рычаг адаптивной рычажной подушки безопасности с помощью инфракрасного дальномера постоянно держит сантиметровое расстояние от груди.
Это расстояние обнуляется в режимах «удар спереди», «удар сбоку», переворот автомобиля. В центре адаптивной рычажной подушки безопасности вырез для адаптивного руля автомобиля.
В режимах «удар спереди», «удар сбоку», переворот автомобиля руль, снабженный 4 инфракрасными дальномерами, плоско прижимается приводами к груди человека, дополняя адаптивную цепную подушку безопасности.
В режиме «удар спереди» адаптивная подушка безопасности вместе с адаптивным рулем держит пружинами (на тросах) с электронными амортизаторами заданный софтом закон замедления туловища человека после удара. Аналогична система защиты человека в режимах «удар сбоку».
Компьютер системы защиты человека от столкновений по 3D-датчику находит вектор удара, таблицами решений находит закон амортизирующего замедления каждого цепного рычага в каждой степени свободы в отдельности.
Цепная рычажная система защиты автомобиля от столкновений увеличит скорость смертельного столкновения с 60км/ч об бетонный куб на надувных подушках безопасности до 90км/ч на цепном кресле с цепной подушкой безопасности, адаптивным рулем.
При выезде автомобиля за линию дорожной разметки вибрирует левая половина подушки водителя: предупреждение. Отказ привода: подушка, спинка кресла принимают стандартные форму, угол «подушка-спинка».
Функция «массаж»: компьютер тросами привода катит волны в цепных захватах кресла. Когда водитель откроет снаружи дверь, привод кресла откроет вбок, отведет назад для свободного прохода человека левые бедренные рычаги подушки кресла, левые рычаги бокового обхвата туловища на спинке кресла.
Человек сел в кресло: цепные рычажные захваты подушки кресла обхватят бедра человека. Поперечные рычаги спинки кресла обхватят пояс, трицепсы сбоку. Верхние плечевые цепные рычаги спинки кресла обхватят сверху плечи
ТОРМОЗА
Чтоб АБС не отказала в колдобинах, не различая проскальзывание под нагрузкой от полета в воздухе колес автомобиля, в систему включается микрофон. По частотной характеристике звука софт определяет нагрузку в тормозах при проскальзывании колес. Система поддержит постоянной нагрузку тормозов. Противоклевковая система.
Дождь – автомат каждые несколько секунд сушит тормоза при ходе стеклоочистителя. Каждый автомобиль по закону о безопасности должен иметь автоматический выключатель аккумулятора, топливного насоса от датчика столкновения. Автоматический выключатель на основе тиристорного станочного пускателя.
В автомобиле GE2.0 тормоза с нитрида бора: не окисляется в воздухе при 2000°C, менее хрупок чем карбон. Карбон в карбоновых тормозах с 650°C окисляется, превращаясь в углекислый газ. Нитрид бора сверхизносостойкий, выдерживающий секундные скачки температуры в 2000°C материал, которым заменяют алмаз в металлорежущих инструментах.
Нитридбор-тормоза за счет сверхвысокой температуры имеют сверхбыстрый теплообмен с охлаждающим воздухом. Поэтому закрытый тракт нитридбор-тормозов выполнен как камера сгорания газотурбинного двигателя воздушного цикла Брайтона. Горячий, после нитридбор-тормозов, воздух расширяется в газовой турбине – крутит компрессор закачивая в тормоза воздух. Этот газотурбинный двигатель не только охлаждает тормоза, но и регенерирует энергию торможения (рекуператор) в электрогенераторе на валу компрессора.
Нитридбор-тормоза долговечнее карбоновых. По теплопотоку на единицу объема нитридбор-тормоза превосходят ракетные двигатели. Нитридборовые диски сцепления автомобиля размерами 2 раза меньше карбоновых. Прочность шлицов нитридборовых дисков многодискового сцепления в разы выше карбоновых.
3-слойный диск тормозов за счет эффекта Зеебека выполнит работу генератора электричества, запасаемого в аккумуляторе
ФАРЫ
(статье 2 раза вредили) при встречном ослепляющем свете лобовое стекло автомобиля пропускает только вернувшиеся назад фемтосекундные импульсы своих фар. Диапазон длин освещенности дороги импульсами света софт определит по скорости и обстановке на дороге.
Международный стандарт: моменты импульса привязаны к сверхточному времени.
Для автомобилей движущихся с севера на юг, с запада на восток импульсы света фар разнесены на 4 фазы по времени, привязаны к сигналам сверхточного времени в целях безопасности движения. Часы автомобилей корректируют по спутникам привязанным к заданным участкам дороги, по наземным радиомаякам.
В автомобиле GE2.0 много маленьких лазерных фар расположены равномерно от левого до правого углов лобового стекла. Свет не попадает на лобовое стекло при включенных фарах – у фар отдельные стекла.
Высокое расположение фар требует веерную характеристику направленности светоизлучения в вертикальной плоскости. У каждой фары свой наклон к горизонтали, освещает свой (вертикально-веерная характеристика) вертикальный сектор.
Фары вертикально-веерной характеристики меньше слепят водителей встречных машин. Дальний свет дают только крайние круглые фары справа. Крайние левые смотрят вниз-вперед на небольшое расстояние, в поисках ям, открытых люков.
Водитель не пропустит ночью глазами дорожную яму, открытый канализационный люк, не ослепит ночью водителей. При торможении растет частота миганий подфарниками. Габаритные огни автомобиля красные справа, зеленые слева. Фиолетовая чтоб не спутали с габаритными огнями, подсветка лужи под порогом открытой двери автомобиля.
Автопроизводители с 1980-х ставят фары ниже чтоб наездом в яму, открытый люк увеличить сумму денег, отдаваемых владельцем автомобиля за ремонт себя, автомобиля по тройной цене запчастей. Становятся обязанными автопроизводителю работники платной медицины, производители комплектующих (снизят цены), государство через налоги – соучастники организованной преступности
АДАПТИВНЫЕ СТЕКЛООЧИСТИТЕЛИ имеют в верхнем конце датчик-А разности давлений «справа – слева». Софт по датчику-А, меняя приводом кинематику стеклоочистителя, устанавливает щетку стеклоочистителя точно вдоль потока воздуха ветрового стекла: поток прижимает встречным потоком щетки стеклоочистителя = больше безопасность движения, в 10 раз меньше мощность электродвигателя стеклоочистителя, меньше расход топлива на лобовое сопротивления автомобиля, выше качество очистки стекла.
Ночью дворники работают быстрее. Включены дворники: фары: ближний свет. Дальнобойность фар в радарной адаптивной обратной связи с скоростью автомобиля. Подогрев стеклоочистителей, форсунок стеклоомывателя. Фароочистители фар работают попеременно.
Фароочистители, стеклоомыватели фар, их подогрев зимой не нужны, если фары стоят над лобовым стеклом на любых автомобилях. Тайным сговором с производителями фар производители автомобилей ставят фары максимально низко. Чтоб ломались от камней, от трещин горячих фар от воды из под колес впереди идущих автомобилей. Повышением спроса на фары производители фар, фароочистителей, стеклоомывателей фар доят граждан.
Стеклоочиститель в время снега, дождя заталкивает снег, воду в карман под лобовым стеклом. С кармана через фильтр насос гонит воду в бачок омывателя. В бачке омывателя накопилась вода: работают омыватели лобового стекла, фар.
Для зашиты от обледенения и кражи роботизированный стеклоочиститель утоплен под капот, закрыт антивандальной роботизированной теплоизоляционной крышкой с тефлоновым покрытием. При работе роботизированная крышка утапливается под капот.
Чем больше наклон лобового стекла, тем больше вес автомобиля, площадь стекла, расход энергии на стеклоочистители, омыватели
АВТОМАТ-КОРОБКА ПЕРЕДАЧ
Обороты ведущего, ведомого валов выравняют транзисторные муфты сцепления в шестернях АКП. Транзисторные муфты сцепления. При переключении выключается кулачковая муфта от быстрого вала. Транзисторная муфта шестерни быстрого вала находясь внутри шестерни медленного вала разгонит его до цифры, выключится после фиксации выбранной передачи 2-й кулачковой муфтой после выравнивания оборотов валов по сигналам датчиков оборотов.
Нет переключения: часть транзисторных муфт работает электрогенератором автомобиля. В режиме электрогенератора в транзисторных муфтах работают только трехфазные секторы обмотки компенсирующие радиальные нагрузки подшипников валов коробки передач отрицательной обратной связью с датчиками радиальной силы валов. Функция регенеративного торможения коробкой передач
ПАНЕЛЬ ПРИБОРОВ автомобиля сверху ветрового стекла. Смотришь на панель приборов вверху, нижним боковым зрением сохраняешь контроль над ситуацией на дороге. Если смотреть на панель приборов снизу ветрового стекла, контакт над дорогой полностью теряется. Взгляд на панель приборов переводится в спокойной ситуации на дороге. Обратный перевод взгляда на дорогу делается быстрее.
За время отсутствия взгляда на дороге ситуация усложняется. Перевод зрачка глаза от панель приборов сверху вниз на дорогу требует 2 раза меньше времени на распознавание ситуации на дороге, чем при движении зрачка снизу вверх.
Верхняя панель приборов в моем автомобиле GE2.0 – сенсорный монитор встроенный в противосолнечный шиток, с электроприводом «вперед-назад». На месте обычной панели приборов адаптивная фигурная панель – упор на грудь человека, заменяющая ремни безопасности. Адаптивная панель безопасности обратной связью инфракрасного датчика, дублированного ультразвуковым датчиком, поддерживает расстояние 1см от груди человека, повторяя все движения вперед-назад.
При уменьшении скорости это расстояние увеличивается. При столкновении автомобиля обратная связь прекращает работу, инерционное движение массы водителя плавно гасится прогрессивной подвеской, электронным амортизатором адаптивной панели безопасности. Аналогичные адаптивные панели безопасности в всех дверях (боковые адаптивные панели безопасности), спинках передних, задних кресел.
Управление инвалидной версией автомобиля GE2.0 – от тензометрического (неподвижного) джойстика на правом (по заказу на левом) подлокотнике кресла.
Скорость поворота передних колес – от силы нажатия на джойстик. При повышении скорости автомобиля пропорционально растет усилие руки на поворот на джойстике для безопасности.
Джойстик инвалидного автомобиля GE2.0 – продольная горизонтальная пластина по форме руки. Корпус джойстика состоит: 4 адаптивных сегмента, каждый обозначает одно из 4 колес автомобиля. Джойстик адаптивный: при уменьшении сцепления с дорогой каждого колеса сигнал об этом подается уменьшением вибрации на соответствующем сегменте. Больше уровень вибрации сегмента – больше сцепление колеса с дорогой.
Водитель инвалидного автомобиля GE2.0 знает о силе сцепления каждого колеса с дорогой по вибрации соответствующего сегмента адаптивного джойстика. Уровень, график вибрации сегментов джойстика – по установкам в мониторе компьютера над лобовым стеклом автомобиля.
Водитель двигает вбок заднюю часть пластины джойстика – поворотом задних колес автомобиля задняя часть автомобиля двигается в том же направлении. Водитель толкает всю пластину джойстика вбок – вбок едет весь автомобиль. Пластина джойстика поворачивается вбок на такой же угол, на который повернулись колеса. Угол поворота каждого колеса автомобиля GE2.0 вычислит софт. Компьютер 4-кратно дублирован с голосованием
РОБОТИЗИРОВАННЫЙ ПОДСТАКАННИК
Обратная связь отвеса роботизированного подстаканника с его 2D-приводом не дает вылиться горячему кофе в стакане в поворотах, подъемах, спусках. По сигналу 2-х потолочных инфракрасных дальномеров с перекрещивающимися лучами подстаканник автоматически приподнимет, отведет в сторону теплоизолирующую роботизированную крышку стакана при поднесении к ней руки
ПАНЕЛИ
У автомобилей кривые бока: боятся дребезга плоских панелей. Из-за кривых боков кривой каркас автомобиля легко сгибается при столкновении, переворачивании. Кривые балки легко гнутся. Чтоб каркас был ровным, панели не дребезжали перед приваркой панели кузова к каркасу изогнуть панель в полуцилиндр по диагонали. Панель прижимом к каркасу выпрямят при сварке. Внутренние напряжения приваренной панели не дают ей дребезжать. Дребезжание уберут: 3-слойная панель с пенопласт-заполнителем, диагональные перемычки квадратов каркаса автомобиля
МОТОЦИКЛ GE2.0
Руль мотоцикла: 2 наклоненные вперед вверх ручки с кнопками большого пальца. При нажатии на кнопку правой ручки руля большим пальцем включается правый поворотник. Повторное нажатие: поворотник выключается. Аналогично левый поворотник.
Нажали обе кнопки ручек руля: включим звуковой сигнал. Если наклонять обе ручки вперед – мотоцикл разгоняется, пока приложена сила наклона.
Наклоним обе ручки назад – мотоцикл тормозит, пока на тензодатчики руля приложена сила наклона.
Софт регулирует вылет вилки в зависимости от скорости, вибрации на вилке. Больше скорость – больше вылет вилки. Больше вибрация – меньше вылет вилки. Таблица решений «радиус поворота – вылет вилки».
Переменная база мотоцикла: при росте скорости привод выдвигает вперед переднее колесо с вилкой (+ увеличение вылета вилки) для бесклевкового торможения не только передним, но и задним колесом. Больше скорость – больше база мотоцикла. Амортизатор руля мотоцикла: транзисторная муфта демпфирует колебания руля. График демпфирования выберет софт
ГРУЗОВИК моей фирмы GE2.0: фары над лобовым стеклом. Множество маленьких круглых светодиодных лазерных фар равномерно от левого до правого углов лобового стекла. Высокое расположение фар требует веерную характеристику направленности светоизлучения в вертикальной плоскости.
У каждой фары свой наклон к горизонтали, освещает свой (вертикально-веерная характеристика) вертикальный сектор. Фары вертикально-веерной характеристики меньше слепят водителей встречных машин. Дальний свет дают только крайние круглые фары справа. Крайние левые смотрят вниз-вперед на небольшое расстояние, в поисках ям, открытых люков. Водитель не пропустит ночью глазами дорожную яму, открытый канализационный люк, не ослепит ночью водителей.
Часть воздуха турбокомпрессора двигателя через радиатор «воздух – воздух» зимой согревает воздух в кабине. Летом часть воздуха турбокомпрессора после радиатор-1 «воздух – воздух» подается на вход 2-го компрессора на валу турбокомпрессора. Затем сжатый воздух идет в радиатор-2 «воздух – воздух». Затем воздух охлаждается расширением на воздушной турбине-детандере на валу турбокомпрессора. Расширившийся на турбине холодный воздух – в кабину.
При торможении растет частота миганий подфарниками. Глушитель с резонансной системой шумоглушения двигателя с перестраиваемой клапаном противофазной резонансной частотой.
Подвеска грузовика с электрорегулировкой степени прогрессивности подвески с продольными рычагами. Активный электромеханический стабилизатор поперечной устойчивости. Автоматы разгона, торможения управляют плавностью разгона, торможения грузовика.
Выбор водителем характеристики работы педали газа. Алгоритм переключение коробки передач – от углового ускорения педали газа. Грузовик имеет выдвижные бамперы спереди, сзади. Больше скорость грузовика – сильнее выдвинут вперед передний бампер. Резче торможение – сильнее выдвигается назад задний бампер. На стоянке бамперы зажимают передние, задние колеса, уменьшая длину автомобиля.
Для точного прохождения прицепов автопоезда по колее грузовика в них индувидуальные инерциальные навигационные системы – ИНС. Компьютер по ИНС грузовика создаёт таблицу решений «время – координата точки колеи» и находит координаты колеи для рулевого усилителя прицепа.
Прицеп электроусилителем руля подруливает точно по колее в памяти ИНС грузовика. Аналогична система полной защиты от боковой вибрации сзади идущих вагонов поезда по сигналу ИНС впереди идущих вагонов. Дополнительно желательна прогрессивная подвеска поперечного хода оси колёс с компьютерным амортизатором
САМОСВАЛ
Кузов без козырька занимает всю верхнюю часть каръерного самосвала. 2 кабины между колесами спереди, сзади с проездом электротележки кресла с водителем по рельсам между кабинами по туннелю через моторный отсек. Колеса поворачиваются спереди, сзади. Сначала передние, затем задние. Телекамеры обзор на угол 360° по дисплеям сверху, сбоку кабины. Кузов сбрасывает груз в 4 стороны. Кузов внутри рифленый с тефлоном в впадинах: не липнет груз + вибраторы (сброс) + обогрев кузова выхлопными газами
ЗАЩИТА ОТ ПРОБОК
Защита от пробок: в каждом районе города 2 радиомаяка, на стандартном расстоянии (стандартный фазовый сдвиг) расстоянии нескольких метров друг от друга для защиты от ложных сигналов, устанавливают свою скорость. В радиусе действия радиомаяков: контролеры радиомаяков – дорожные «черные ящики». На случай судебного разбирательства нарушения автомобилем скорости от радиомаяка из-за радиопомех.
Благодаря радиомаякам городские автомобили в будущем станут универсальнее, шире, выше, короче для уменьшения занимаемой ими в городе площади. Радиомаяки дают навигационный сигнал, информацию (включая требование остановки) водителю с системы управления дорожным движением.
Весь транспорт в городе двигается с одинаковой скоростью от местного радиомаяка. Обгоны запрещены. В разделительной полосе автобана на вертикальных осях колеса с толстым микропористым покрытием + центробежные тормоза: гасят скорость отброшенного на разделительную полосу после автокатастрофы автомобиль.
Для судебного восстановления картины автокатастрофы в силовом каркасе, панелях автомобиля пьезомикрофоны: по регистратору определят начальный угол между векторами движения столкнувшихся автомобилей по разнице времени прихода продольных, поперечных волн звука
60)
БРОНЕАВТОМОБИЛЬ: (статье 5 раз вредили) в СМИ случаи применения киллерами направленной электромагнитной пушки бесшумно стреляющей электромагнитным импульсом через заднее стекло (радиопрозрачно) автомобиля-1. Антенна: встроенный в заднее стекло провод обогрева. Компактные неприметные массовые хетчбеки с экранировкой двигателя и окраской кузова быстро смываемой спецрастворителем краской.
У хетчбеков стекло максимально сзади: СВЧ-волны затухают с расстоянием. Мотоцикл или автомобиль-2 как соучастник маневрами сзади добиваются роста скорости автомобиля-жертвы. Хетчбек спереди автомобиля-жертвы на опасном повороте выстреливает СВЧ-импульс в двигатель.
Газы пирозаряда узконаправленной электромагнитной пушки идут не попадая в атмосферу в отведенную им пустую 50л емкость глушителя (или термос) обитую изнутри поролоном. Шум глушат двойные стенки емкости глушителя. Акустический портрет шума: негромкая без верхних частот одиночная вспышка несгоревшего бензина выхлопной трубы мотоцикла.
СВЧ-импульс генератора узконаправленной электромагнитной пушки коаксиальным кабелем идет в антенну, на 5сек выводя из строя микропроцессор системы управления двигателем, ионизируя рабочую смесь камер сгорания двигателя автомобиля-жертвы. Между электродами свеч короткое холодное замыкание через ионизированную рабочую смесь. Искры нет. Зажигание двигателя не работает, блокируются ведущие колеса с заносом задней оси на опору моста (тоннеля), на обочину в пропасть в рассчитанный киллером момент.
Хетчбек загоняют в закрытый грузовой автомобиль. Эту технологию успешно применили для ликвидации английской принцессы Дианы 1997г.
Предлагаю защиту: в главной передаче муфта свободного хода как в велосипеде. Остановка двигателя: колеса не блокируются, свободно крутятся. Задний ход: муфту свободного хода блокирует электромагнитная кулачковая муфта сцепления.
Муфта свободного хода в главной передаче: экономия 5% топлива, больше ресурс двигателя, шин. Муфта свободного хода нужна автоспорту для защиты от тормозного момента двигателя в повороте, для экономии топлива на поворотах, для защиты от заклинившего форсированного двигателя.
Бронированным автомобилям нужна муфта свободного хода, отдельная муфта свободного хода для заднего хода для экстренного ухода назад по телекамере заднего вида от блокированной грузовиком, гранатометчиками дороги.
Узконаправленная электромагнитная пушка вихревыми токами Фуко выводит из строя микропроцессор дизеля. Напряжение разрушения: микропроцессоры 6-10V, микросхемы динамической памяти с произвольным доступом DRAM до 7V от земли, CMOS логика 7-15V, кремниевые высокочастотные транзисторы связного оборудования 15-65V, арсенид-галиевые полевые транзисторы 10V.
Наиболее вероятное напряжение вихревых токов Фуко в микропроцессорах от военной электромагнитной бомбы: 100V. Защита от электростатической, электромагнитной составляющих импульса электромагнитной пушки: используется микропроцессор с рабочим напряжением 500V (такие производятся) + экранировка электрических цепей, микропроцессоров автомобиля по коаксиальному, экранному принципу.
2 изолированных друг от друга наэлектризованных высоким напряжением (внутренний экран: минус, внешний: +) экрана из магнитомягкого материала с медным покрытием. Между экранами диэлектрик с высокой диэлектрической проницаемостью, постоянное высокое напряжение пьезотрансформатора 20000V. Импульсы электромагнитной пушки медленно нарастают, быстро спадают = проникающая способность электромагнитной пушки 2 раза больше. Соответственно нужна 2 раза больше толщина магнитомягкого экрана, 2,1 раз больше масса защиты.
В моде кумулятивные мины с магнитным креплением, устанавливаемые мотоциклистами на крышу уничтожаемого изнутри бронированного автомобиля. Антикумулятивная система моей фирмы GE2.0: ультразвуковые датчики находят координаты мины на крыше. Ультразвук идет по материалу крыши, отражается от корпуса мины. На крыше приподнимается цилиндрический контейнер с многосерийными пирозарядами. Цилиндр повернет датчик угла, прицеливаясь в мину по координатам от ультразвуковых датчиков.
Многосерийные пирозаряды большой серией слабых высокочастотных взрывов направленной волной ракетного сопла срывает кумулятивную мину с крыши. В промежутках между слабыми взрывами ультразвуковые датчики определяют координаты кумулятивного заряда. По их данным софт регулирует силу ударной волны частотой включения пирозарядов.
На крыше 2-4 поднимающихся приводом вверх цилиндра с пирозарядами. Для защиты от несчастного случая софт антиминной защиты крыши установлен на включение режимов: от минимальной скорости, от класса опасности, от датчика открытия двери, от кнопки выключателя.
Крыши бронированных автомобилей из немагнитных непроводящих материалов – защита от электромагнитного крепления взрывного устройства с питанием электромагнитов от генератора несимметричного (медленно нарастающая, резко спадающая амплитуда полупериода колебания) пульсирующего или разнесенного переменного тока треугольной формы. Такие электромагниты примагничиваются к немагнитному проводящему листу несимметричным (медленно нарастает, резко спадает) пульсирующим или переменным (медленно нарастающая, резко спадающая амплитуда полупериода колебания) током.
Напряжение электромагнитной бомбы идет в микропроцессоры через кабель питания. Через кабель энергия должна поставляться микропроцессору через промежуточную ступень энергоснабжения ПСЭ: конденсатор с транзисторными реле между кабелем и объектом. Вначале конденсатор ПСЕ транзисторными реле отключается от блока питания микропроцессора, подключается к кабелю.
От кабеля конденсатор заряжается электроэнергией. Заряженный конденсатор транзисторный вольтметр через транзисторное реле отключает оба провода от кабеля, подключает их к блоку питания микропроцессора. Повтор процесса. Вариант: конденсатор с индуктивностью или закорачиваемая транзистором индуктивность.
У бронированного авто немагнитные, непроводящие ток плоские днище, крылья чтоб видеть установленные мины. На днище, крыльях ультразвуковые импульсные излучатели по форме, скорости ультразвуковой волны находят приклеенные плоские пластиковые мины. В софте компенсация сигнала от комков грязи
ПРОТИВОМИННЫЙ АВТОМОБИЛЬ: в езде по дорогам с минами автомобиль приводом приподнимается над шасси 1,5м. Шасси с подвеской максимально обтекаемые для гиперзвуковой струи взорвавшейся под передним колесом мины. Обитаемый отсек на пружинах с электронными (софт) амортизаторами
61) (статье вредили) С 1978г я неоднократно заявляю: мне хватит 10 лет чтоб доказать: я чемпион мира по конструированию. Государство реагировало на это агентурным (профессиональная гордыня Создателя запрещена Евангелием) гостеррором против меня. Продолжаю непрерывно заявлять до сих пор: я чемпион мира по конструированию. Срок 10 лет сократил до 3-х лет. За всю жизнь мне никто ни разу не дал шанса доказать это.
Дешевый массовый 5-местный автомобиль на четверть меньше по размерам и вдвое дороже от зарплаты среднего рабочего, чем в начале 1970-х. Стоимость появившихся за это время функций автомобиля 6% его себестоимости. Средняя производительность оборудования за это время выросла втрое. Спрос на мировом рынке растет. Более наукоемкие товары видеомагнитофоны, DVD-проигрыватели за это время подешевели в 10 раз.
Класс менеджеров принуждает конструкторов каждую новую версию модели автомобиля делать крупнее, просторнее, хотя есть более крупные, просторные модели. Стандартные узлы, механизмы в более крупном автомобиле снашиваются быстрее: за запчасти платят по тройной цене.
Инженерный дизайн – цвет, форму техники определяет баланс функций, законы физики и химии, а не извращения дизайнеров. Потребителям, производителям (меньше себестоимость) выгоднее чтоб форму товара задал инженер по функциональной логике непосредственного пользователя. Почти все современные автомобили уродливы от того, что менеджеры отняли у инженеров функцию дизайна автомобиля. Чем больше функций отнимают у инженеров дизайнеры, маркетологи, менеджеры тем меньше шанс инженера создать шедевр инженерного искусства.
С 2008г менеджеры требуют с инженеров конструировать автомобильную светотехнику по принципу максимальной вероятности механического повреждения светотехники. С 2014г на крыльях автомобилей выштамповки тонкой круглой антирихтовочной линии (перпендикулярный плоскости крыла радиус закругления линии 3-8мм) чтоб сделать рихтовку дороже покупки нового крыла.
60-80% кинетической энергии автомобиля идет в задние колеса даже в полноприводных автомобилях. Ближе мотор, коробка передач к задним колесам – легче, компактнее, дешевле в изготовлении, эксплуатации автомобиль. У заднемоторного автомобиля больше проходимость, вдвое меньше расход топлива усилителем руля, на 15-25% легче автомобиль, выше его КПД. Не надо тянуть дорогую нержавеющую выхлопную трубу, карданный вал через весь автомобиль. Переднемоторный автомобиль тормозят 2 колеса, заднемоторный 4 колеса: расходы на шины заднемоторного вдвое меньше. Автопроизводители ставят мотор спереди чтоб после столкновения владелец по тройной цене купил радиатор, насос…
1930г: Вильгельм Майбах создал автомобиль высшего класса «Майбах-Цеппелин-ДС8»: 7-ступ.коробка-полуавтомат с электродистанционным переключением рычажком у руля как в гонках F1.
1931г: Майбах снизил вес отказом от коробки передач: увеличив рабочий объем двигателя уравнял крутящий момент с моментом главной передачи. Серийный выпуск 5-местного автомобиля высшего класса «Майбах-Цеппелин» с 2-ступенчатой коробкой передач развивающего 200км/ч. Передача-2 только в крутых подъемах в горах. Вместо коробки изменение оборотов, количества впрыскиваемого в камеру сгорания топлива: меньше вес, размеры, себестоимость автомобиля.
Христиане законами уменьшили рабочий объем двигателей чтоб переход на дорогое топливо, масло увеличил налоги на промышленность. Низкооборотные двигатели многотопливностью, нетребовательностью к фильтрам и расходникам уничтожают нефтехимическую промышленность.
Малый период разработки поколения техники не дает автомобилям перейти на многотопливные газотурбинные двигатели: нужен период разработки 7-10 лет, сегодня 3 года. Малый период разработки поколения техники не дает разработчикам микропроцессоров разработать качественно новую архитектуру процессоров, усложняет (совместимость) архитектуру микропроцессоров, не дает разработчикам разработать товар с нуля в новой идеологии, не дает разработчикам делать крупный шаг вперед из-за проблем с запчастями, техобслуживанием при малом периоде смены поколений товара. Большой период смены поколений позволил авиации перейти с поршневых к газотурбинным двигателям, от дозвуковых к сверхзвуковым самолетам, от механического управления самолета к управлению по проводам. В малом периоде смены моделей отдельные разработки уводят объект в тупик эволюции.
Малым фирмам надо 5-9 лет для превращения товара в инженерный шедевр. К этим 5-9 лет класс силовиков добавляет годы «экологическими» законами чтоб финансово убить малые фирмы, монополизировать рынок крупными корпорациями (сверхприбыли = сверхналоги). Класс силовиков «экологическими» законами защищает оплачиваемый труд от изобретателей и малых фирм.
1578г: силовики города Данциг задушили изобретателя лентоткацкого станка, уничтожили станок для сохранения оплачиваемого труда, защиты от безработицы. Никто не мешал им давать пособие по безработице из налогов на предпринимателей + плановые госзаказы предпринимателям.
Крупные корпорации неспособны решать запутанные технические проблемы в создании прорывных технологий из-за узкой специализации инженеров, отсутствия у них профессиональных прав. Крупные корпорации не решаются переходить на новые технологии без шпионажа, предпочитая вкладывать деньги не в разработку товара, а в шпионаж.
Малые, средние фирмы сильнее вкладываются в рискованные разработки товара, способны решать запутанные технические проблемы – у них универсальные инженеры с профессиональными правами. Но не берутся если нет гарантии вернуть деньги на разработку.
Сложность товара растет пропорционально числу конструкторов. У товара должен быть 1 отец-человек чтоб был технологически простым. Чем больше людей создают автомобиль, тем меньше в нем Единой логики – возможна только в одной голове.
«Экологические» законы увеличили энергопотребление стран-производителей за счет роста промышленности, грузоперевозок для нее, рост энергопотребления транспорта при доставке на работу обратно работников, увеличили стоимость двигателей, техобслуживания, размеры промышленности. 80% топлива, природных, человеческих ресурсов затрачиваемых на мировые грузоперевозки, пассажироперевозки нужны не людям, а промышленности, техобслуживанию: ежедневный приезд на работу, отъезд миллиардов лишних работников.
Общественно лояльная экологичная конструкция, снижающая расход топлива страной – народный автомобиль 1930-х «Фольксваген жук» – создан с точки зрения ИНТЕРЕСОВ гражданского общества, а не корпораций. Фольксваген Жук создан по идеологии минимума оплачиваемого труда – он освобождал человеческие, финансовые ресурсы для подготовки государства к войне.
1973г экономический кризис от цен на нефть: фирма Porsche создавала 1-й в мире экологичный автомобиль: проект «Long-life Car» – равнопрочный автомобиль с 20-летним ресурсом – у немцев хватит денег на пользование автомобилем при высоких ценах на нефть за счет уменьшения расхода нефти Германией. Главный потребитель нефти – промышленность. Сокращение размеров промышленности вдвое за счет долговечных равнопрочных товаров: автомобиль из долговечных материалов; вместо контактных датчиков бесконтактные, коробку-автомат не сломают. Проект привел к скрытой войне с Porsche силовиков и менеджеров – бойкот, Porsche от банкротства спас Volkswagen.
За 20 век автомобиль, компоненты стали втрое долговечнее, себестоимость снизилась втрое. Потребление обществом автомобилей должно было уменьшиться в 6 раз, грузоперевозки производства автомобилей в 10 раз. Производительность промоборудования за 20 век выросла в 3-10 раз. Современный уровень техники позволяет увеличить ресурс автомобиля до капитального ремонта с 5 до 50лет: богатые, бедные будут ездить в одних автомобилях: бедные в б/у.
Экология требует больше срока службы автомобиля – меньше потребность промышленности в транспорте, нефти. Экология требует ограничения средней скорости автогонок только 1 единственным способом: ограничение веса автомобиля, объема топлива. Экология требует признания автогонок командным видом спорта в котором участвуют и одиночки.
Поддержка повышенной долговечности, равнопрочности техники Министерством Обороны. Ему надо уменьшать материалоёмкость, энергоёмкость производства, расход страной топлива, масла, тормозной, охлаждающей жидкостей, расходных материалов; влияние на природу (скрытность), чувствительность товара к веществам, к радиации, к электропомехам. Военным для сырьевой независимости нужны долговечность, равнопрочность, живучесть, универсальность, большой диапазон температур, давления, влажности переносимых товаром в эксплуатации – совпадает с экологией.
Единственное противоречие между экологами, военными – экологам нужно загнать население в сверхкрупные города из сверхвысоких небоскребов – минимум теплообмена, перемещения массы, энергии, информации. Военным нужны рассредоточение населения.
Экология: отказ от охлаждающих, смазочных, тормозных… жидкостей; воздушное охлаждение, пневмотормоз + электроклапан, электротормоз, твердая смазка как в военной, космической технике, естественные материалы: дерево, кожа = меньше зависимость от сырьевых стран.
Больше безопасность автомобиля – больше средний срок службы. Восстановление изношенных деталей автомобилей гражданскому обществу выгодней изготовления новых.
Мощность – произведение расхода рабочего газа двигателя на разность давлений при совершении полезной работы. Газовое сопротивление выхлопным газам катализатора увеличивает расход топлива. Идея катализаторов допустима для экологии при условии, что каталитическое покрытие просто нанесено на поверхности без роста газового сопротивления. Шум глушить турбонаддувом, турбокомпаундом, турбогенератором шумопоглощающей конструкции.
Экология требует для автомобилей газотурбинный двигатель постоянных оборотов: дросселируются вход центробежного компрессора, вход соплового аппарата турбины для сохранения КПД двигателя в частичных нагрузках (работа на постоянных оборотах при любой нагрузке на валу турбины). Можно утилизировать тепло выхлопных газов паротурбогенератором (вакуум в конденсаторе + весь генератор в гермокорпусе паротурбогенератора).
Экономику страны должны строить не экономисты, а инженеры. Только инженеры как самый системный класс знают как свести к оптимальному минимуму цифры расходов государства на материалы, энергоносители, энергию, на человеко-часы производства и техобслуживания. Экономисты все делают наоборот.
Организовывали бы экономику государства инженеры – налоговые законы карали бы производителя за неравнопрочность, недолговечность товаров. Инженеры формируют гостребования к продаваемым на внутреннем рынке страны товарам по принципу минимизации расходов гражданского общества, государства.
Максимум военно-мобилизационных ресурсов государства через стирание различий между гражданской, военной техникой за счет равнопрочности, долговечности, универсальности товаров, унификации комплектующих и материалов
Cнижать налоги на джипы, товары удовлетворяющие военным требованиям:
1. надежные уплотнения дверей на случай применения химического, атомного оружия в время войны.
2. прочная подвеска.
3. микропроцессоры джипа должны допускать их применение в военной технике.
4. двигатель джипа должен запускаться после суточного пребывания джипа под водой.
5. материалы, комплектующие, элементная база, стандарты, протоколы взаимодействия в военной и гражданской технике должны быть полностью совместимы.
6. Стоимость сертификации сложных дорогих серийных товаров малых предприятий оплачивает государство, если сумма сбора налогов от данного предприятия по производству аналогичного товара превысила установленную Законом сумму. Сертификация с госбюджета 1 раз за установленный Законом период времени для данного класса по списку функций товаров
Решали бы государства экологические, экономические проблемы:
1. убрали бы принудительное страхование. Страхование автомобилей повышает вероятность автокатастроф
2. ввели бы налог за малозаметный на дороге цвет автомобиля – снижение вероятности автокатастроф
3. ввели бы налог на число цилиндров автомобиля: больше цилиндров – больше налог.
4. дали возможность заменять одни виды налога другими
5. ввели бы налоги на недолговечность, неравнопрочность автомобиля: меньше ресурс автомобиля – больше налог. Если автомобиль неравнопрочен, налог в процентах от 8-летней себестоимости техобслуживания автомобиля в сравнении с равнопрочными аналогами на рынке. Себестоимость вычислит инженер-технолог по принципу суда: обвинитель – защитник – судья. Налог на себестоимость техобслуживания для изготовителя. Высокая себестоимость обслуживания причина плохого сбыта массовых автомобилей из легких, но дорогих авиационных материалов. От их сбыта зависит расход горючего страной.
6. налог на изготовителя за годовое потребление автомобилем расходных жидкостей. Кроме топлива.
7. высокие налоги на изготовителей одноразовых товаров с Черного списка
8. усиление роли общественного транспорта в городах
9. поощрение гибких графиков, надомной работы, большого количества выходных у работодателей.
10. поощрение многоэтажности городских строений (уменьшает расход человеческого, машинного топлива среднестатистическим человеком).
Лучший способ уменьшить стояночную, динамическую площадь занимаемую автомобилем на дороге – уменьшить длину автомобиля, увеличить высоту, ширину (угол опрокидывания).
Рост ресурса, равнопрочности, живучести, безопасности автомобиля повысит уровень жизни по автомобилю, процент дорогих автомобилей на рынке, уменьшит долю стоимости страхования от стоимости автомобиля. Относится к всем товарам.
Весо-моментные макеты дорогих узлов автомобиля с заданной твердостью, жесткостью заменят оригинальные узлы в краш-испытаниях автомобилей.
Автомобили должны конструировать не офисные крысы, а автослесарь + автогонщик-раллист. Автогонщик отвечает за высокую управляемость, минимум шума, вибраций, за обратную связь руля, шасси сконструированного им автомобиля. Слесарь отвечает за дуракоустойчивость, несложность, нетрудоемкость конструкции, простоту сборки разборки, диагностики, регулировок. Слесарь с стажем конструируя не берет цилиндрические соединения с малым зазором: в полевых условиях собрать тяжело. Заменит беззазорными коническими соединениями. Товар должны конструировать непосредственные пользователи товара.
1л человечьего топлива двигают 75кг велосипедиста на 40км. Лучшие автомобили – 3л/100км (рекорд 1л/4000км) двигая 1200кг: автомобиль + 5 пассажиров. На тонно-километр человек тратит топлива 10 раз больше лучших автомобилей, мотоциклов. Поезд тратит топлива 6 раз меньше грузовика, морское судно большое 4 раза меньше грузовика
62)
СТАНКИ БУДУЩЕГО: (статье вредили) алмазные, нитридборовые шлифовальные круги токарных, фрезерных станков, гибких обрабатывающих центров отправят на свалку эволюции фрезы, резцы. Алмазный порошок разрушает суппорт. Многорычажные беззазорные механизмы с прямолинейной траекторией движения инструмента – инвенсоры (у меня изобретения на эту тему) отправят на свалку суппорты.
Рычажные направляющие керамическими уплотнениями шарниров защищены от абразивной пыли. Рычажные направляющие качения, с кулачково-роликовыми, безроликовыми (у меня изобретения на эту тему) пружинными выравнивателями крутящего момента двигателя привода в 10 раз уменьшат расход энергии станками.
Шлифовальные круги сделают токарные, фрезерные станки универсальными: смогут бесшумно (за дверцей), без вибрации обрабатывать любую сверхтвердую керамику, хрупкие сотовые конструкции, волокнистые композиционные материалы. Фрезы, резцы не могут, вырывают волокна с углепластика, боропластика, стеклопластика… композитов, снижая их прочность, водоустойчивость.
Стоимость эксплуатации высокооборотных фрез, алмазных крупнозернистых кругов одинакова. Не нужна коробка передач: крутящий момент резания алмазного круга 10 раз меньше фрезы. Правка алмазного круга алмазным карандашом под охлаждающей жидкостью с подачей алмазного карандаша обратной связью с микрофонами осевой, радиальной вибрации подшипника круга, с датчиком крутящего момента шлифовального круга. Цифры крутящего момента оси круга установит в компьютере станочник.
Подача круга с обратной связью от крутящего момента абразивного круга. Подача круга с обратной связью от микрофонов осевой, радиальной вибрации корпуса подшипника круга. Софт микрофона работает по таблицам по принципу: больше громкость звука – меньше подача станка. Энергия частот звука понижается или приближается к резонансной частоте станка – меньше подача станка. Выбор станочником звуковых частот обратной связи в компьютере станка.
Станки с 2 сторон одного поворотного вала прямого привода имеют 2 абразивных круга: крупнозернистый (быстрый съем материала) круг, мелкозернистый (точная доводка размера, шероховатости) круг. На станки с абразивным кругом не влияют неоднородности металлопроката, в отличие от обычных станков.
После расплавления металла он остается в абразивном кругу неохлаждаемым в течение почти оборота круга, проникая внутрь него на 1,5мм силами поверхностного притяжения. Надо охлаждать абразивный круг спереди по ходу вращения и по всей рабочей поверхности круга в течение всего оборота круга до следующего касания металла точкой круга. На холодный метал не действуют силы поверхностного притяжения: он не проникнет в абразивный круг на глубину 1,5мм, не приклеится слетит.
Станки с системой мгновенного останова роторов электромоторов с возвратом энергии торможения роторов в электросеть. Электроэнергия торможения электромотора идет поочередно в разные выводы (разные индуктивность, активное сопротивление обмоток) резонансного многообмоточного автотрансформатора, преобразуется в ток промышленной частоты, вернется в сеть. Мгновенный останов электромоторов повысит скорость, безопасность работы. Вариант-2: конденсатор + дроссель.
Я изобрел: в станке после замены круга двухдатчиковый (датчики силы на валу) механизм непрерывной автоматической балансировки абразивного круга по износу.
Моя изобретательская фирма GE2.0 выпустит компьютерные тиски-наковальню с 6 зажимными сегментами, с электроприводом, с линейкой тензодатчиков и табло: установки силы зажима. В компьютере тисков режим (с дополнительными приспособлениями) ИСПЫТАТЕЛЬНЫЙ СТЕНД – испытания механизмов на ресурс.
Создание завода-автомата тормозят методы сборки, соединения деталей. В сборке, соединениях деталей проблема: сборка малозазорных цилиндрических, шлицевых соединений. Замена малозазорных цилиндрических, шлицевых соединений на беззазорные конические, 4-гранно-пирамидные соединения упрощает создание завода-автомата для колонизации Луны, других планет роботами. Вопрос автоматического производства микропроцессоров я решил конструкцией микропроцессора, удобного для производства с 3 ионными лучами (разные вещества) на кремниевой подложке + электронный луч испарит излишки нанесенного слоя.
Все станки на которых я работал, сконструировали офисные крысы, которые никогда сами не работали за сконструированными ими станками в условиях реального производства. Станки должны конструировать рабочие-станочники с стажем, а не офисные крысы. Никто лучше станочника не знает как конструировать станок. Средства производства должны быть в всем мире в личной собственности тех, кто на них работает. С своей собственностью станочник вправе делать все, что сочтет необходимым.
Офисные крысы конструирующие станки, управляющие маховики, ручки, пульты управления станком ставят пониже чтоб мы рабочие всю жизнь нагнувшись стояли у станка, болели радикулитом, остеохондрозом. Все маховики, ручки, пульты управления станков должны стоять сверху над головой рабочего – нет наклона позвоночника. Маховики управления вкладывать концентрично один внутрь другого чтоб не шарить вслепую находя нужный маховик, кнопку не отводя глаз от инструмента.
Рисунок насечки на рукоятках разных маховиков разный. Чтоб вслепую ощупью мгновенно найти маховик. Глаз смотрит на стружку, не на орган управления. Рычажными опорами маховиков рабочий устанавливает удобную высоту маховиков. Цепные приводы маховиков на ходовые винты станка. Концентричные цепные шестерни нескольких концентричных маховиков один внутри другого. Натяжные антилюфтовые ролики цепей + антилюфтовый профиль шестерней цепи. Есть много способов двустороннего снятия люфта. Заготовка в шпиндель токарного станка: сзади, слева станка
63)
РЕПЛИКАТОР АЛМАЗОВ: как в своем гараже делать алмазы? Берем стальную трубу D=25см, длина 120см. В центр трубы запрессовываем кольцо из самого тяжелого, самого жесткого вещества: металла осмия (можно осмий-иридиевый сплав или вольфрам-рениевый сплав).
В внутренний диаметр кольца из осмия запрессовываем цилиндр из графита по длине меньше чем осмиевое кольцо. С помощью обмотки индуктора нагреем графит до 2000°C. Справа, слева от цилиндра из графита направляющие конусы в осмиевом кольце.
Алмаз получим сжатием до 1млн атм цилиндра из графита двумя встречными кумулятивными струями с пластичного сверхтяжелого сплава металлов: больше плотность, пластичность – больше импульс металлической струи сжимающей графит.
Микроволновые обмотки с обратной связью с полупроводниковыми датчиками температуры греют графит и горячие (500°C. Особый химсостав) кумулятивные заряды до максимума температуры для дополнительной энергоемкости, равномерности работы. Желательны кумулятивные заряды, в которых вместо кислорода другой химический элемент-окислитель не взаимодействующий с алмазом.
Кумулятивную металлическую струю разгонят 3 кумулятивных заряда. В левой части трубы 3 кумулятивные воронки-1-2-3. В правой части трубы три кумулятивные воронки-1-2-3. Между зарядами кумулятивных воронок кольца из микропористого силиконового каучука. Угол конуса в кумулятивной воронке-2 меньше, чем в кумулятивной воронке-1 с учетом скорости металлической струи.
Угол конуса в кумулятивной воронке-3 меньше, чем в кумулятивной воронке-2. Перед работой в трубе создают вакуум для свободного ускорения металлической струи.
При работе репликатора алмазов в левой части трубы вначале сработает кумулятивная воронка-1 разгоняя металлическую струю до скорости-1. Затем сработает кумулятивная воронка-2 разгоняя металлическую струю до скорости-2. Затем сработает кумулятивная воронка-3 разгоняя струю сверхтяжелого сплава до 15км/сек.
Две встречные (30км/сек) струи из сверхтяжелого сплава металлов попадая в направляющие конусы осмиевого кольца, сожмут цилиндр горячего графита до 1млн атм, превращая его в большой алмаз.
Для синхронизации электроимпульсов кумулятивных воронок используем 3 термостатированные калиброванные акустоэлектронные линии задержки, работающие параллельно в одном кристалле. Все провода: коаксиальные кабеля с гальванической развязкой для защиты от электромагнитных бомб. 3-ступенчатый вакуумно-кумулятивный ускоритель на встречных струях, работающий в Глушителе в личном гараже, уничтожит монополию на рынке алмазов.
Глушитель: прочная, защищенная от взрыва изнутри, труба закрытая с обоих концов крышками на болтах. Энергию давления газов кумулятивного ускорителя регенерирует турбогенератор.
Вариант-2: вместо кумулятивных воронок-1-2-3 в торце трубы кумулятивный заряд, представляющий собой кумулятивную воронку переходящую большим диаметром в длинный кумулятивный цилиндр в форме зубчатого колеса (перпендикулярное оси цилиндра сечение похоже на зубчатое колесо).
«Зубчатое колесо» это соединенные между собой по окружности линейные кумулятивные заряды, дающие плоские кумулятивные струи метала идущие к оси цилиндра. Снаружи кумулятивного цилиндра лабиринтная детонационная разводка и продольные (вдоль оси цилиндра) детонационные шнуры. Поджигают лабиринтные детонационные разводки воспламенители, к которым идут коаксиальные (защита от внешних наводок) провода.
Вначале работает кумулятивная воронка разгоняя струю из мягкого пластичного сверхтяжелого сплава. Затем лабиринтная детонационная разводка поджигает детонационные шнуры линейных кумулятивных зарядов («зубчатое колесо») разгоняющих волной давления струю сверхтяжелого сплава до 15км/сек.
Две такие встречные струи попав в направляющие конусы осмиевого кольца, сожмут цилиндр с заранее нагретого до 2000°C горячего графита до 1млн атм, превратив в большой алмаз
Акустоэлектронное (вместо конденсаторного) детонационное реле для детонационных линз:
1. плоскость пьезокристалла перпендикулярна фронту ударной волны.
2. акустоэлектронное детонационное реле расположено на расстоянии при котором она даст все сигналы до того, как до нее дойдет ударная волна.
3. акустоэлектронное детонационное реле имеет защиту от электромагнитных полей, вибраций.
4. пьезокристаллы с стабильным временем генерации сигнала.
5. звукопровод с материала с высокой и стабильной скоростью звука.
6. сигнал пьезокристалла идет в коаксиальном кабеле для максимума скорости, уменьшения наводок.
7. акустоэлектронное детонационное реле подключается к источнику электропитания за минимальное время до взрыва детонационной линзы
64) Инженеры повысили точность датчика гравитационных волн LIGO установив в таймере модулятора Фарадея оптимальное значение периода-МО Многократного Отражения каждого импульса света между зеркалами в 4-километровых плечах LIGO.
Каждый лазерный импульс отражается между двумя зеркалами 4-километрового плеча ~4000 раз на одной прямой.
Модулятор Фарадея прерывает световой поток когерентного лазера на время таймера, нарезая лазерные импульсы. Время прерывания светового потока лазера – период-МО.
Инженеры LIGO подогнали период-МО по принципу – максимальный вероятный сдвиг фазы за эти 4000 отражений лазерного импульса между двумя зеркалами равен полупериоду частоты волны лазерного импульса.
При отсутствии гравитационных волн датчик настроен на нулевой выходной сигнал. Гравитационная волна сдвигом фазы создает выходной сигнал.
Подгонка периода-МО под максимальный вероятный сдвиг фазы немного уменьшила период-МО не влияя на точность измерения за период-МО.
При уменьшении периода-МО увеличилось общее время накопления сигнала гравитационной волны – больше периодов-МО укладывается в сигнал гравитационной волны. Точность LIGO удвоилась – фиксирует перемещение зеркала на 0,0001 диаметра протона
65) ЖИДКОТОПЛИВНЫЕ РАКЕТЫ: (статье 6 раз вредили) Генералы контрразведки заменили жидкотопливные ядерные ракеты твердотопливными чтоб ракеты не делали небольшие фирмы, чтоб ослабить влияние класса инженеров на ход мировой истории. Монополистические сверхприбыли корпораций – налоговые сверхдоходы для роста числа функций государства для вмешательства в жизнь семей и граждан с целью экономической, идеологической диктатуры класса силовиков против конкурирующего за госвласть самого системного класса – класса инженеров.
Производство жидкотопливных ракет безопасно: металлообработка, пайка, сварка тонкостенных деталей – скрытого диверсанта легко вычислит техконтроль тонкостенных деталей. Скрытые диверсии в производстве твердотопливной ракеты невозможно найти техконтролем.
Производство тонкостенных конструкций дешево, безопасно. Большинство деталей (фрезеровка, пайка, сварка…) жидкотопливных ракет могут делать малые, средние предприятия. Брак тонкостенной детали жидкотопливной ракеты выкинуть недорого.
Твердотопливная ракета – это много слоев склеенных между собой. Отслоение некачественных клеевых слоев между корпусом ракеты и твердотопливным зарядом дает газовые пузыри, в которые по мелким трещинам наполовину сгоревшего твердотопливного заряда проникают давление и температура с камеры сгорания. Давление и температура создают внутри пузыря по его границам трещины в твердотопливном заряде. Растут размеры пузырей, отламывается кусками твердотопливный заряд, выбивая новые куски и увеличивая поверхность горения. Камера сгорания теряет герметичность корпуса, давление падает, ракета не долетает до цели.
Диверсанту достаточно добавить что-либо в клей, изменить температуру техпроцессов – ракеты не долетят до цели. Телеметрия не объяснит взрыв, в отличие от телеметрии жидкотопливной (больше каналов) ракеты.
Брак изготовления твердотопливного заряда весом десятки тонн так дорог, что производить без риска банкротства могут только крупные корпорации. Они могут платить семьям дорогие компенсации за смерть рабочих (разряд статического электричества…) от взрыва твердого топлива, компенсации за потерю здоровья при работе с твердым топливом.
1987г: взрыв (эквивалент 50т тротила) цеха производства твердотопливных ускорителей «Спейс Шаттл» от электростатической искры. Погибли рабочие. Защита твердотопливной ракеты от статического электричества стоит дорого. У жидкотопливной проблемы нет.
Жидкотопливная морская ракета ($10млн) ~5 раз дешевле твёрдотопливной типа «Булава» ($40-50 млн) – час дежурства ~10 раз дешевле. Твердое топливо ракет с годами усыхает, трескается – горючее, окислитель медленно реагируют. Деградация твердого топлива начинается с 15 лет после изготовления, максимальный срок службы 25 лет. У капсулированных жидкотопливных ракет через 25 лет топливо сливают, проверяют баки на давление, заливают топливо обратно, капсулируют, ставят в очередные 25 лет дежурства.
Жидкотопливные ракеты легко диагностировать датчиками давления, твердотопливным нужен дорогой регулярный осмотр на трещины в топливе.
При отказе термостатирования контейнера ракеты и изменении температуры твердого топлива на 10°С от трещин (рост поверхности горения) толстых стенок твердого топлива ракета взорвется не долетев до цели.
В США морской климат, в России континентальный с колебаниямиями до 100°С – термостатирование 5 раз дороже. Не подвезли дизтопливо, отказ обоих дизель-генераторов термостатирования – твердотопливную ракету спишут, жидкотопливную можно сразу запускать.
Переходили к твердотопливным ракетам из-за гидроударов от плескания жидкостей в баках жидкотопливных ракет в автомобилях, подлодках. Достаточно было просто зажать жидкости в баках армированными мешками с сжатым нейтральным газом системы наддува баков + давление в телеметрии.
При равных условиях жидкотопливная ракета на ~40% компактнее – заполнена топливом полностью. Твердотопливная ракета это ~33% пустоты заполненной азотом. У твердотопливных ракет тяжелее, дороже сопла с приводами.
Жидкотопливные ракеты легче компактнее твердотопливных аналогов, летят дальше. У жидкотопливных ракет энерговооруженность на 24% больше – можно сделать легче на 24% или сделать короче разгонный участок полета увеличив тягу двигателя, стартовое давление в баках. В дальнобойных твердотопливных ракетах ступень-3 всегда жидкотопливная – может управлять скоростью ракеты, твердотопливная нет.
1991г атомный подводный ракетоносец «Акула»: поочередный взрыв 2-х ступеней баллистической твердотопливной ядерной ракеты оказался опаснее (окислитель, горючее идеально перемешаны) аварии жидкотопливной ракеты.
Время стартового наддува баков жидкотопливных ракет можно сократить до 5сек. Аварийная система слива топлива общая на десятки ракет подлодки: не требует большого объема баков. Колесный носитель сливает топливо на грунт на ходу под слоем пожарной пены.
Погрузка-разгрузка межконтинентальной жидкотопливной ракеты требуют грузоподъемность крана в 9 раз меньше (без топлива), чем твердотопливной.
Жидкотопливную ракету с компенсатором (армированный мешок) разности давлений «жидкость-морская вода» можно хранить в подлодке весь срок службы без защиты от давления забортной воды, запустить с неограниченной глубины.
Глубоководные твердотопливные ракеты от электростатической искры защищают электропроводящая жидкость + напыление прозрачного слоя золота на поверхность твердотопливного заряда. Твердотопливную для компенсации разности давлений заполняют тоннами (вес ракеты вырастет на треть) жидкости. Это дает глубину старта до 150м.
Хранение крупной ракеты в подлодке без защиты от давления даст трещины твердого топлива от деформаций при погружениях подлодки: мал ресурс крупной морской твердотопливной ракеты без защиты от давления забортной воды.
Чем больше небольшие фирмы уничтожают монополии на рынке высоких технологий, тем сильнее класс инженеров и слабее силовики, менеджеры. Менеджеры, силовики «экологическими» законами, госстандартами лоббируют самые дорогие, самые трудоемкие технологии типа замены жидкотопливных ядерных ракет на твердотопливные или принуждения «экологическими» законами к замене низкоборотных двигателей большого рабочего объема автомобилей на высокооборотные малого рабочего объема.
По законам физики для роста КПД двигателей и полного сгорания топлива нужны аддиабатные низкоборотные (больше рабочий объем – дольше, полнее горит топливо) форкамерно-факельные двигатели в автомобилях. Высокооборотные двигатели недолговечны, сложны, слишком точны для небольших фирм – выгодно силовикам, менеджерам крупных корпораций для ослабления класса инженеров (чем больше инженеров, тем меньше их влияние) и монополизации рынка
ЖИДКОТОПЛИВНЫЕ АВТОМОБИЛИ: запретом жидкотопливных автомобилей христиане концентрируют население стран в крупных городах с целью сократить человечество, упростить будущие бомбардировки (городов, электростанций, линий электропередач) нехристианских стран для строительства евгеникой Евангелия Мирового христианского правительства.
Военная безопасность стран требует максимум автономности транспорта. Жидкое топливо легко изготовить прокаливая в автоклаве с водой без доступа воздуха органический мусор по известным технологиям.
Христиане пропагандируют электромобили по христианскому принципу изначальной (с рождения человека) виновности человека – налог за утилизацию ядовитого аккумулятора электромобиля весом в полтонны. Для вымогательства налога запретят автомобили.
Аккумуляторы – монополия крупных корпораций способных платить медицинские, страховые расходы на персонал токсичных производства, переработки, утилизации аккумуляторов.
Христиане «экологическими» законами убивают малый бизнес на всей планете для роста оплачиваемого труда – от нехватки человеко-часов малые фирмы уничтожают оплачиваемый труд новыми технологиями.
Электромобили с остаточным ресурсом 20-40% христиане будут экспортировать в Африку, Азию, Латинскую Америку – их отравят миллиардами ядовитых тяжелых аккумуляторов.
Электромобиль в сравнении с автомобилем с большим одноцилиндровым адиабатным двигателем на ~50% тяжелее из-за тяжелого аккумулятора – для движения электромобиля нужно на 50% больше энергии – на 50% больше тепловое загрязнение планеты.
Автомобили менее опасны на дороге: весят на 33% меньше – по законам физики при равной затрате энергии у них быстрее обгон, лучше тормозят. Более тяжелые электромобили разрушают дороги – затраты энергии, ресурсов на ремонт дорог. Большой расход покрышек у более тяжелых электромобилей распыляет в атмосфере на 50% больше токсичной резиновой пыли. Налог на транспорт должен быть по массе.
Сложим вместе потери на преобразование, транспортировку энергии с теплоэлектростанции до колес электромобиля: КПД в колесах электромобиля 29%. У автомобиля с газотурбинным двигателем, гибридной (маховик-генератор) электропередачей КПД на колесах 35%. Электромобиль тратит в масштабе планеты на 60% больше энергии на пассажиро-километр, тонно-километр с учетом того что он на 50% тяжелее.
Производство аккумуляторов отравляет природу ядовитыми отходами. Если в пассажиро-километр, тонно-километр включить затраты энергии на производство транспорта и его утилизацию, тогда на пассажиро-километр, тонно-километр электромобиль требует вдвое больше энергии, чем автомобиль.
Христиане переходом на электромобили ускоряют отравление планеты отходами чтоб обвинив гражданское общество в отравлении планеты дать силовикам новые права против гражданского общества, превратить граждан в рабов.
Аналогична ситуация с водородными транспортом – его с 1980-х навязывают силовики. С взрывоопасной водородной техникой легко устраивать теракты – это на 20% увеличит численность и финансирование силовиков, навяжет вину гражданскому обществу с целью превращения граждан в рабов силовиков по учебнику рабовладельцев Евангелие.
В ~50% случаев классовые интересы силовиков и менеджеров корпораций противоположны интересам гражданского общества. Промышленность должна подчиняться инженерам, а не менеджерам. Классовые интересы инженеров работающих по принципу индивидуальной профконкуренции универсальных инженеров, на 99% совпадают с интересами гражданского общества.
Выбор самых экономичных, экологичных технологий должен быть у инженеров (самый компетентный класс, самый системный класс), а не у силовиков, менеджеров, экономистов, экологов. Класс силовиков христианских стран как самый антисистемный класс (класс управляемого хаоса) разрушает (всё что не от Бога будет искоренено – слова Христа) всё, чем управляет не класс силовиков
ВЕРТОЛЕТ Ка-50: (10 раз вредили) КПД соосных винтов на 22% выше одиночного того же диаметра: вертолет компактнее при равной грузоподъемности. Отсутствие хвостовой балки с приводным валом не защитимым даже от пуль, повышает боевую живучесть машины. При равной мощности двигателя на 1000м больше потолок, на 5м/с больше скороподъемность, при равной безопасности летит на более низкой высоте. Соосные вертолёты выполняют полет боком с высокой скоростью, другие манёвры недоступные одновинтовым.
При равных условиях одноместный вертолет Ка-50 несет на тонну больше брони, вооружения. Ка-50 с автоматом сопровождения цели (+ сигнализация срыва сопровождения цели), автопилотом и виртуальным пилотом (как в Су-57) выполнит задачу лучше двухместного в условиях сильной ПВО противника: в двухместном вертолете нужно 9-20сек договориться об атаке, одноместному хватит 0,5сек.
Переход с 2-местных военных вертолетов на 1-местные уменьшит вес вертолета (с учетом брони, системы катапультирования летчика) на 1 тонну. Лучше эту 1т веса потратить на броню и более дальнобойные (тяжелые системы охлаждения) датчики, на бортсистемы ПРО и РЭБ, на лазерную систему борьбы с датчиками ракет.
За счет расположения ближе к центру масс вертолета, пушка Ка-50 точнее чем у Ка-52, Ми-28, Апач. Лобовая проекция меньше всех. Бронирование лучше всех.
Для замены Ка-50 «Черная акула» на Ми-28 генералы требовали 2-местную версию. Летчики-испытатели были против.
2017г Сирия: большинство из 59 крылатых ракет выпущенных в аэродром ВВС Сирии американским флотом, сбили российские вертолеты, помехами заглушив приемники импульсов радиовысотомеров ракет.
Ка-50 генералы объявили негодным – в бою заблокируют помехами приемники радиовысотомеров автопилота – летчик только наводит пушку стреляя с поворотом вертолета. Защита от помех: при включении противником помех, по сигналу разнесенных датчиков помех, софт вертолета автоматически увеличит мощность передатчика радиовысотомера, пропорционально уменьшив чувствительность приемника. Высотомер отказал – вертолет наберет высоту.
Надо внедрить радиовысотомеры с 4 частотами максимально поглощаемых атмосферой для защиты от помех противника. Моночастотный радиовысотомер может отказать из-за противофазного сложения отражённых сигналов – одновременное отражение сигнала с нескольких объектов. Для безотказности 4-частотный радиовысотомер с 4 разнесёнными некратными друг другу частотами + голосование каналов.
Можно добавить опцию – высотометр на рентгеновских импульсах – они не блокируются помехами. В рентгеновском высотомере вертолета рентгеновские импульсы получают сверхкороткими импульсами 100кВ подаваемыми через коаксиальные кабель и конденсатор в коаксиальный вольфрамовый резистор. Конденсатор с высокой добротностью ограничивает ток, повышает крутизну заднего фронта рентгеновского импульса. Быстродействующий рентген-приемник – йодид цезия на кремниевом фотодиоде.
Перед атакой пилот в борткомпьютере ставит алгоритм: минимальной, максимальной высот полета… Пилота-2 заменят виртуальный пилот, дистанционно управляемые телекамеры, датчики, голос наземного оператора: вместе с летчиком одновременно в реальном времени воюет датчиками, оружием вертолета целая рота операторов дистанционного управления, выдающих на экране цели, предупреждающих об новых угрозах.
Высокая скороподъемность: полет вертолета в режиме рельефа местности по рентгеновским датчикам высоты, сноса с большей скоростью на более низкой высоте в более плохую погоду. Пилот поворотами шлема управляет высотой полета, но не может снизиться ниже заданной софтом высоты полета или подлететь к деревьям или проводам линий электропередач (распознают датчики электростатического поля) ближе позволяемого датчиками (телекамера, тепловизор) двухплоскостного круиз-контроля.
Помехоустойчивость криптозащищенного канала телеметрии через встречно-направленные узконаправленные лазерные лучами с датчиковым (управление софтом направленностью передающих лазеров, приемных датчиков луча) и инерциально-гироскопическим взаимным самонаведением лучей.
Телеметрия рентгеновскими, ультрафиолетовыми, инфракрасными, терагерцовыми лучами. Чувствительность приемных каналов обратной связи борткомпьютер ставит обратно пропорционально мощности лучей приемника фильтруя помехи по уровню.
На расстоянии до 2км в условиях гонки мощностей лучей равными противниками непрерывно блокировать все частоты электромагнитных волн в время войны нереально: многочастотная модуляция; псевдослучайные перескоки частоты передатчика, приемника.
Вмешательство хакера маловероятно: динамический диалоговый пароль + динамическая шифровка канала + добавление в канал сигнала генератора случайных чисел + неизвестный алгоритм сжатия канала + псевдослучайные переключения с одних неизвестных 4-кратно дублированных операционных систем компьютера на другие + учет истории (гироскоп) ракурса прихода сигнала приемника…
Неэргономичную систему управления огнем, вертолетом заменить эргономичной. Улучшить характеристики датчиков вертолета, софта автопилота: алгоритмы полета вертолета в бою настроит борткомпьютером летчик.
Ка-50 ликвидирован идеологией контрразведки. Контрразведка – страховое агентство, работающее про идеологии страхового агентства – это идеология борьбы против усиления человеческого фактора:
1. запрещено увеличивать влияние человеческого фактора: незаменимых людей нет
2. все процессы организации должны быть стабильны. Нестабильность карается
3. профессиональная конкуренция запрещена или сильно ограничена
4. бойкот универсальных специалистов
5. работа людей ориентирована на максимум личных связей
6. все работает как структура с максимумом (сбор информации) взаимных связей между элементами
7. структура требует одновременной работы большого числа узкоспециализированных элементов
8. узкая специализация людей. Их ответственность коллективизируется
9. запрещены взаимно независимая работа элементов структуры
10. запрещены универсальные элементы структуры
Агенты контрразведки проникая в предприятия, идеологией доводят до банкротства в условиях конкуренции на рынке. Контрразведка законами уничтожает профессиональную конкуренцию специалистов, конкуренцию предприятий (территориальный монополизм) на рынке. Это ведёт государство к экономическому краху.
Попытки контрразведки решить экономические, военные проблемы государства напоминают попытки решить проблему оптимизации Уголовного Кодекса юристами. Юристы наоборот максимально запутают Уголовный Кодекс чтоб политически усилить класс юристов, увеличить его финансирование гражданским обществом.
Только класс инженеров может оптимизировать Уголовный Кодекс, принципы, законы государства, сведя их к малому числу универсальных законов, принципов. Тогда 90% юристов, 80% силовиков станут не нужны. Это причина невидимой классовой войны против класса инженеров и изобретателей.
Крупнейший удар против профессиональной идеологии контрразведки – уменьшение экипажа вертолета Ка-50 до 1 человек. Исчезли понятие коллектив, фактор личных связей, роль человеческого фактора выросла до максимума. Летчик стал универсальным специалистом, универсальной ячейкой военной структуры.
Это вызвало такой шок, что контрразведка десятилетиями блокировала серийный выпуск Ка-50, ликвидировала конструкторское бюро Камов как идеологического врага.
Надо было перейти на единый 1-местный вертолет типа Ка-50 с обработкой криптозащищенной телеметрии операторами датчиков наземной базы + операторы датчиков помогают бортсистеме борьбы с ракетами и с датчиками беспилотников. Телеметрию 1-местных вертолетов командование в реальном времени военным интернетом даст всем своим.
В Ка-50 летчик устает в разы меньше чем в Ми-28. От усталости гибли летчики штурмовиков Су-25 в Афганистане. Ка-50 отличает от людоедского Ми-28 многоразовый (катапультирование) экипаж: летчик на обучение которого затрачены годы, большие деньги после катапультирований воюет снова.
Нужен беспилотный вертолет разведки с искусственным интеллектом + сетевое управление с функцией передачи информации узким инфракрасным, терагерцовым и ультрафиолетовым лучами с задней полусферы с управлением ракурсов лучей навигационной системой.
Большинство сирийских зенитно-ракетных комплексов в войне 1982г уничтожили сверхкомпактные одноразовые израильские ударные беспилотники на основе обычных авиамоделей, управляемых людьми по телекамерам. Беспилотники низкого полета таранили зенитно-ракетные комплексы корпусом с взрывчаткой. На цель наводили телекамерами сверху легкие беспилотники-разведчики.
В Ка-50 у редукторов запас 20% для брони. Запас прочности коробки передач позволил танку Т-34 нарастить броню до противоснарядного уровня, иначе не выпускали бы как БТ-8 из-за брони. В конце войны Т-34 не имел противоснарядную броню: ходовая часть слаба.
Конец войны – эпоха бронированных монстров типа ИС-3, «Королевский тигр» (в 1945г в Венгрии у озера Балатон «Королевские тигры» отбросили Красную Армию на 40км пока не кончились топливо, боеприпасы). Уже разрабатывали более бронированные танки ИС-4, Е-100 (140т) – не хватало высококвалифицированных экипажей.
Пока идут войны с равным противником танки растут в весе от дефицита подготовленных (дорого обучать, трудно найти способных) человеческих ресурсов. Защищенность (масса) танков растут до самого конца войны и 3 года после.
Профессиональная идеология контрразведки запретила с 1950г тяжелые танки, заменила двухместный танк Т-95 с пушкой 152мм и бортовой бронёй экипажа более крупным трехместным танком Армата (оба танка 55т) с пушкой 125мм без бортовой противоснарядной брони (не хватает по ширине танка места для брони) экипажа.
Армату придется перевести на 152мм пушку (58т), вместо 3-местной Арматы создать для уменьшения веса одноместную с обработкой криптозащищенной телеметрии операторами датчиков наземной базы + операторы датчиков помогают бортсистеме борьбы с ракетами, с датчиками беспилотников.
Гусеницы танка с шахматным расположением колес ремонтопригодны, если для доступа к колесу-Х, закрытого справа и слева от него колесами-Y, поднимаем приводом (Система регулирования дорожного просвета) подвески вверх колеса-Y. Колесо-Х снимаем без снятия колес-Y. Шахматное расположение колес: больше проходимость и плавность хода, в разы точнее наводка прицела в движении, меньше расход топлива в бездорожье. Защита танковых колес от обледенения: нетеплопроводные материалы, покрытие блокирующее обрастание (кристаллизацию) льдом, периодическое использование ультразвука.
Класс силовиков боится усиления класса инженеров, изобретателей: в войне где реакция компьютера и обратной связи «распознающий цель управляющий датчик – оружие» ~0,003сек военные не нужны: их заменят инженеры, специалисты ИИ и военный ИИ типа Скайнет. Солдат на поле боя заменят андроиды.
Самый системный класс общества – инженеры – создадут военную систему управления основанную (иерархия приоритетов, управление соотношением потерь) на выгодном соотношении потерь – проиграет войну тот у кого первым кончатся ресурсы
66) (статье 3 раза вредили) Из-за груза сбоку ракеты-носителя «Энергия» опрокидывающий момент компенсируют уменьшая тягу (дросселирование) двигателей с противоположной от груза стороны на старте: каждая секунда взлета потеря 12т топлива. Через 8м взлета автомат стабилизации наклоняет ракету самолетом сверху чтоб в одной вертикали центр масс «ракета – груз» и вектор тяги. Энергия на 5сек наклоняет все двигатели на угол 7° вбок до упора: горизонтальная составляющая тяги сдувает 5-тонные бетонные плиты.
Ракета на боку с самолетом наверху. Двигатели наклонены. Запас углового управления ракетой исчерпан, его восстанавливают дросселированием двигателей с стороны груза – рост расхода топлива на борьбу с гравитацией. У дросселируемого двигателя меньше КПД из-за противодавления атмосферы.
Летя боком Энергия тратит больше топлива от роста сопротивления воздуха. Чем меньше топлива в центральном баке ракеты, тем сильнее наклон ракеты для совмещения с вертикалью общего центра масс, вектора тяги. Чем выше летит тем сильнее дросселируются двигатели. С полупустым центральным баком Энергия-Буран летит завалившись вбок, дросселируя двигатели – рост расхода топлива от потерь на гравитацию: Энергия-Буран на 370т (стартовый вес «Союз» 307т) и 15% тяжелее Спейс-Шаттл при равной грузоподъемности.
У Спейс Шатл в отличие от «Буран» с старта работают двигатели (максимум общей тяги 660т – 5,78 раз больше веса самолета – 114т). Горизонтальной составляющей тяги на старте нет: двигатели самолета дросселируют до высоты 40м: тяга уравновешивает самолет, его ускорение. Выше 40м автомат стабилизации укладывает внешний бак на самолет сверху, переводя двигатели самолета в максимум тяги.
Опорожняя внешний бак Спейс Шатл уменьшает наклон вбок и сопротивление воздуху. От неравенства тяг правого, левого твердотопливных ускорителей Спейс Шатл наклонен автоматом стабилизации вбок к ускорителю большей тяги – рост сопротивления воздуха. Твердотопливная ступень-1 Спейс Шаттл на 21% тяжелее варианта с ЖРД. С ЖРД легче дешевле безопаснее – не было бы наклона ракеты вбок от разности тяг ускорителей.
Правильная схема челнока: в космическом самолете нет маршевых двигателей. 3 пирозамка крепят моторную раму с маршевым двигателем к космическому самолету. 3 пирозамка крепят моторную раму космического самолета сбоку к моторной раме ступени-1. Пирозамок соединяет космический самолет сверху к ступени-1. Взлет: двигатели работают одновременно. Двигатель самолета работает от баков ступени-1 до отделения. Перед отделением тягу двигателя ступени-1 уменьшаем, плавно переключая двигатель самолета на работу с его баков. Отделение ступени-1: отстегиваем нижние 2 пирозамка от моторной рамы космического самолета. Телеметрия работы пирозамков, отстегивание верхнего пирозамка соединяющего самолет с ступень-1. 5 сек: сброс моторной рамы с двигателем.
МКР «БУРЯ»: 1957г: аналог привода андроида Айзек работал в 220°C (рассчитан с смазкой на 400°C) в межконтинентальной титановой крылатой ракете «Буря» (98т, термояд.бомба 2,35т). Привод: реверс-редуктор с 2 электромагнитными многодисковыми муфтами сцепления с единым выходным реверс-валом. Вал крутит червяком шариковой червячной передачи газовые, аэродинамических рули.
Реверс-редуктор – валы параллельно соединенные цепной и зубчатой передачей через электромагнитные муфты сцепления:
1. между соосными ведущей звездочкой цепной передачи и ведущей шестерней зубчатой передачи внутри шестерни.
2. между соосными ведомой звездочкой цепной передачи и ведомой шестерней зубчатой передачи внутри шестерни.
В варианте соосности входа, выхода реверс-редуктора электромагнитные многодисковые муфты сцепления расположены:
1. между соосными ведомой звездочкой цепной передачи (1-я от входа по принципу минимального теплового потока) и ведущей шестерней зубчатой передачи внутри шестерни.
2. между соосными входным, выходным валом реверс-редуктора, между соосными ведущей звездочкой цепной передачи и ведомой шестерней зубчатой передачи внутри шестерни.
Теплообменник «топливо солярка с 220°C – аммиак жидкий». Вскипев аммиак прокрутив турбину компрессора аммиака шёл в теплообменник «аммиак-азот», сжимался до жидкой фазы компрессором, шёл обратно в теплообменник «солярка – аммиак жидкий». Приборный отсек охлаждал азот с баллона.
1960г: привод с нешариковой червячной передачей успешно работал в «Буря» при 220°C 2ч полета (3500км/ч, 6425км, 18-24км, крылья и корпус 350°C), управляя высокотемпературными рулями.
Шариковая червячная передача 1957г отказала. Малое тепловое сопротивление вала газового руля (1480°C ускоритель ракеты) расширило шестерню 10 раз быстрее корпуса червячного редуктора. Был статический (тепловое расширение), но не по времени расчет зазоров с учетом тепловых сопротивлений, уноса тепла вентиляцией.
Я применил бы принцип динамического равенства тепловых сопротивлений: тонкостенный вал-труба с пенометалл-заглушкой горячего конца вала, с неподвижной вентиляционной охлаждающей противоточной трубой внутри для уменьшения мощности привода (качение вместо скольжения).
1-й полет: «Буря» на старте держат 3 пирозамка (замок с приводом поршня от порохового заряда с электроподжигом). Пирозамки отсоединены: от резкого взлёта «Буря» инерция замкнула контакты реле, отстрелив газовые рулей – «Буря» перевернулась. Реле повернули чтоб контакты двигались перпендикулярно вертикали.
В «Буря» большой кварцевый фонарь астронавигатора (точность 900м. Метод: 2 пересечения на глобусе 2-х окружностей равных угловых высот двух звезд) вместо 2 широкоугольных объективов на 340°C диаметром в сантиметры от нежелания добавить 4 дополнительных диска с кулачками на вал кулачкового механического компьютера для софта компенсации широкоугольных искажений объектива. При быстром вращении вала, достаточном числе многодорожечных кулачковых дисков операционной системы, электромеханический компьютер выполнит задачи персональных компьютеров.
Последний механический компьютер вышел в Космос 1960г в беспилотном испытании корабля Юрия Гагарина: расчет 2D-отклонения вертикали в алгоритме торможения с орбиты. В вакууме кулачковый вал приварился к подшипникам. Испытать совместимость материалов в вакууме можно за 5 мин в вакуумной или аргоновой микроволновке объёмом 0,3л
4 катастрофы лунной ракеты Н1: малое тепловое сопротивление вала турбонасоса увеличило его длину 10 раз быстрее корпуса. Был статический (тепловое расширение), но не по времени работы расчет зазоров с учетом тепловых сопротивлений. На ракете Н1 крыльчатка кислородного насоса удлинившись от теплового удлинения вала турбонасоса, задевала корпус – порошок металла взрывался в чистом кислороде. За 4 года замедлили скорость роста тяги до прогрева вала турбонасоса, сдвинули осевые подшипники вала турбонасоса, увеличили зазор «крыльчатка – корпус кислородного насоса». Надо тонкостенный вал-труба с неподвижной вентиляционной охлаждающей противоточной трубой внутри вала. Надо совмещённый в одной точке двусторонний осевой подшипник у кислород-насоса. Скорости звука материалов внешней, внутренней частей подшипника должны различаться: нет резонанс-вибрации
Ракета Р-16, 1960г: 126 человек убил кулачковый программный таймер. Не было выключателя напряжения бортовой батареи ракеты от всех цепей. Типа выключателя общей массы аккумулятора гоночных автомобилей.
Кулачковый программный таймер жмет кулачками программного диска на расположенные кругом выключатели, поочередно включая клапана двигателей ступеней-1-2 ракеты. Провода ступеней-1-2 внешне одинаковы – перепутали местами при пайке к таймеру.
Вместо включения клапана подачи горючего ступени-1 ракеты, таймер в ступени-1 включил зажигание, в ступени-2 клапан окислителя: десятки тонн азотной кислоты залили площадку. Следующий день: провода перепаяли прямо в ракете.
Устанавливали таймер в нулевое положение шаговым электромотором. Он без заднего хода: вернёт таймер в нулевое положение только вращая программный диск в том же направлении. Выключатель нулевого положения таймера дает сравнить работу таймера с аналогом в бункере. Программный диск после вчерашнего пуска ракеты стоит между командами включения клапанов и зажигания двигателей ступеней-1-2.
От борт-батареи ступени-2 ракеты отключили шаговый электромотор диска общего таймера ступеней-1-2, отключили цепи клапанов двигателя ступени-1, забыли отключить цепи клапанов двигателя ступени-2. Прокручивая ручной батареей диск таймера включили борт-батареей ступени-2 её двигатель: за 20сек сжег ракету.
1-й в мире искусственный спутник Земли, Юрия Гагарина в космос вывела ракета Р7. В 1-х полетах ракета переворачивала себя. Длинное тонкостенное тело ракеты пружинило, извивалось как змея от изменения угла, тактирования вектора тяги двигателей. 3D-гироскоп оказался от рулевого привода на полдлины поперечной волны изгиба тела ракеты от изменения угла, тактирования вектора тяги двигателей – сигнал гироскопа шёл в противофазе.
По заранее измеренному периоду, информации (от датчиков поперечного ускорения) о фазе изгиба тела ракеты в точке расположения гироскопа стали давать в автомат стабилизации сигнал с вычисленным сдвигом фазы. Центр масс сдвинули вверх для уменьшения амплитуды изгиба корпуса ракеты, понижения резонансной частоты системы «ракета – гироскоп – привод рулевых двигателей».
20 переменных: 3 угла ракеты; 3 угловых скорости; 3 ускорения; 3 угла Луны: проекции вектора притяжения Луны в 3 оси ускорения, изменение координат от вращения земли, зависимость силы тяжести от высоты
67)
ФИЛОСОФИЯ ГАЛАКТИЧЕСКИХ КОЛОНИСТОВ (статье 3 раза вредили) основана на мобилизационной способности государства быстро создавать материально-техническую базу на территории осваиваемых колоний Галактики для защиты от врагов. Использование только мобильных бесфундаментных средств производства, легко перемещаемых при наступлении противника.
Отказ от требующих фундамент прессового оборудования (половина стоимости завода): только оборудование расчитанное на ровный пол без фундамента, колодцев, ям, тоннелей, без ударных нагрузок. Отказ от неразборного крупногабаритного оборудования. Вместо штамповки - гнуть листы, минимум двояковыпуклых деталей. Технологии с минимальным количеством обрабатывающего инструмента. По возможности отказ от окраски техники.
Колея железной дороги 4м: танки, груженые грузовики въезжают в вагон сами. Ширина поезда равна ширине колеи = минимум износа рельсов, ударных нагрузок рельсов на товар. Правое, левое колесо оси имеют свой радиальный, отдельные цилиндрические упорные (с перпендикулярной осью вращения) осевые подшипники на не вращающейся железнодорожной оси.
Для снижения затрат энергии отопления, кондиционирования заводских помещений низкие потолки цехов, замена кранов телероботами, погрузчиками, спиральными пандусами. Каждая единица оборудования работает без другого оборудования, без централизованного энергоснабжения сжатым воздухом, энергоносителями: ценно в время войны, сильного спада производства. В сборочных соединениях цилиндрические соединения заменяют коническими для простоты сборки. Технологический минимализм + максимум потребительских (не технических) функций. Технику собирают с некрупных разъемных деталей. Право, лево, вверх, вниз, больше, меньше, другие параметры передают с точки зрения непосредственного исполнителя.
Нижняя ступень системы управления по своему усмотрению выполняет приказ в общей форме от верхней. Если есть возможность выполнить цель по приоритету выше, чем задаваемая верхними ступенями – более приоритетная цель заменяет цель от ступени выше (принцип приоритета)
ПРИНЦИПЫ СИСТЕМ УПРАВЛЕНИЯ:
1. подчиненный моего подчиненного не мой подчиненный
2. профправа моего подчиненного не мои профправа
3. по любому вопросу решение принимает самый компетентный по этому вопросу
4. каждое конкретное профправо принадлежит только одному работающему человеку системы (предприятия)
5. права человека выше прав наций и религий
6. у государства нет права вмешательства в отношения сторон без согласия хотя бы одной из сторон. Список исключений минимален.
Больше ресурс, живучесть, равнопрочность, безопасность товаров – меньше городские, промышленные свалки, меньше промышленность – главный потребитель грузоперевозок, строительства, энергопотребления, ресурсопотребления, пассажироперевозок (на работу, командировки, перемещения внутри предприятия). Более массовый товар – жестче экологическая сертификация товара.
Для мелкосерийных, дорогих автомобилей, других товаров экологические налоги малы: этот сектор рынка дает новые технологии, определяет реакцию потребителя на новые функции для планирования производства.
Общественная потребность в экономии ресурсов через экологические налоги при недостатке сертификационного ресурса товара по стандартным функциям товара. Апелляция: Суд взаимно несообщающихся экологических экспертов. Суд: анонимность судьи приравнена к лжесвидетельству кроме исключений в законе.
Идеология живучести: децентрализация технических систем: нет ответа на датчики центральным компьютером (поврежден снарядом) его алгоритмом выборов заменяет компьютер, сохранивший требуемый трафик с наибольшим количеством датчиков, рабочих органов.
Южная философия живучести: дублирование функции несколькими системами в разных физических принципах, интеллектуальные системы с датчиками, восстанавливающие потерянную от повреждения (снарядом…), износа функцию другими исполнительными элементами, датчиками = быстрота разработки, минимальный технический риск.
Северная философия живучести: стремление к минимализму; минимум дублирования, искусственного интеллекта, датчиков; простые элементы с сверхнизкой вероятностью отказа, дорогие предпродажные испытания, материалы. Элементы товара не изолируют от температуры, давления, влажности, радиации, температурных скачков. Простота, дешевизна эксплуатации. Пример Северной философии живучести: неизолируемые при хранении от давления воды ядерные ракеты подводных лодок запускаемые с глубины 800м.
В будущем ядерные ракеты будут запускать крупные подводные беспилотники с ИИ, предварительно перед запуском сбросив контейнеры с ядерными ракетами на многокилометровую глубину. К моменту запуска крупные подводные беспилотники окажутся далеко от района запуска и снова сбросят контейнеры с ядерными ракетами на многокилометровую глубину перед очередным запуском.
МАРСИАНСКАЯ БАЗА: (статье вредили) бомбардировка Марса против хода (уменьшение радиуса орбиты) движения астероидами из льда, айсбергами с колец Сатурна (90-95% из льда). Атомные электростанции марсианских колоний работают на уране, тории с безлюдных роботизированных предприятий астероидов. Геостационарные зеркала Марса освещают солнечные батареи марсианской базы, они отражают волны сотовой связи
ПЛАНЕТА ВЕНЕРА: Химические заводы в дирижаблях добывают фтор с облаков плавиковой кислоты средних слоев атмосферы Венеры. Жидкие сплавы свинца, висмута сила поверхностного натяжения поднимает по пористым поверхностям на горные вершины Венеры, удешевляя производство металлов. Венера источник урановых руд высокой концентрации: нет воды вызывающей ядерную реакцию замедлением нейтронов. Венеру терраформируют роботы, остудив ускорением вращения кометами, астероидами, способными химически связать вредные вещества атмосферы в твердые вещества.
КОСМИЧЕСКАЯ БЕНЗОКОЛОНКА: кольца Сатурна из водяного льда. Ультрафиолетовые лучи Солнца испаряют поверхность этих космических айсбергов, разлагают пары воды на водород, кислород. Водород уходит в космос, кислород вмерзает в айсберг. В айсбергах роботы добывают кислород гибкой шарнирной матрицей микроволновых присосок. Водородом баки робот заполнит на ракетных прямоточных двигателях, ныряя в атмосферу Сатурна.
Планета – небесное тело на поверхности которого на площади 100кв/км сила тяжести не менее 10% от земной.
68)
ИИ-ПОИСКОВИК (статье 15 раз вредили)
АЛГОРИТМИЧЕСКИЙ ИИ (ИИ на обычных алгоритмах) – это таблицы готовых решений + таблицы коммутации. Клетки таблиц готовых решений коммутируют таблицы коммутации. В таблицах коммутации древовидные алгоритмы коммутации данных.
Данные с таблиц ДЕРЕВА АНАЛИЗА СМЫСЛА переходят в таблицы ДЕРЕВА СИНТЕЗА РЕШЕНИЙ. Данные с конечных Ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА переходят в конечные Ветви ДЕРЕВА СИНТЕЗА РЕШЕНИЙ.
Таблицы готовых решений – это решения уравнений, привязанных к переменным этих уравнений. Решения в таблицах – это цифры в относительных (проценты от шаблона или эталона) величинах для унификации большинства таблиц решений ИИ. Тысячи разных моделей мира сводятся к общим (совпадающим по цифрам) для них таблицам решений.
Информация входных сигналов ДЕРЕВА АНАЛИЗА СМЫСЛА по его Ветвям идет через сотни тысяч таблиц решений. В каждой Ветви между между двумя ближайшими разветвлениями есть своя библиотека таблиц решений. В каждой таблице решений есть переменные уравнения. Цифры для переменных уравнения софт берет с входных сигналов ДЕРЕВА АНАЛИЗА СМЫСЛА.
Пропустив входные сигналы через библиотеку таблиц Ветви ДЕРЕВА АНАЛИЗА СМЫСЛА, софт получает готовые решения с таблиц. Эти решения софт добавляет в КОНТЕЙНЕР ДАННЫХ. В КОНТЕЙНЕРЕ ДАННЫХ есть входные сигналы ДЕРЕВА АНАЛИЗА СМЫСЛА. КОНТЕЙНЕР ДАННЫХ идет в дальше по ветвям ДЕРЕВА АНАЛИЗА СМЫСЛА.
Описанный процесс получения софтом готовых решений таблиц и добавления их в КОНТЕЙНЕР ДАННЫХ повторяется в каждой ветви ДЕРЕВА АНАЛИЗА СМЫСЛА. В конечной Ветви ДЕРЕВА АНАЛИЗА СМЫСЛА специальный алгоритм очищает КОНТЕЙНЕР ДАННЫХ от уже ненужной информации входных сигналов ДЕРЕВА АНАЛИЗА СМЫСЛА.
КОНТЕЙНЕРЫ ДАННЫХ
через выходные ветви ДЕРЕВА АНАЛИЗА СМЫСЛА переходят в входные ветви ДЕРЕВА СИНТЕЗА РЕШЕНИЙ. Единственный выход ДЕРЕВА СИНТЕЗА РЕШЕНИЙ дает цифровым кодом все решения, ответы.
В КОНТЕЙНЕРЕ ДАННЫХ:
1. Блок-Н – нераспознанная информация
2. Блок-Р – распознанная информация
КОНТЕЙНЕРЫ ДАННЫХ двигаясь по всем Ветвям ДЕРЕВА АНАЛИЗА СМЫСЛА собирают информацию диапазонов уровня обобщения смысла слов:
1. диапазон уровня обобщения по территории
2. диапазон уровня обобщения по физическому или химическому параметру класса объектов
3. другие диапазоны уровня обобщения
КОНТЕЙНЕРЫ ДАННЫХ двигаясь по всему ДЕРЕВУ СИНТЕЗА РЕШЕНИЙ уточняют, объединяют выходные данные.
Скелет ИИ на обычных алгоритмах – слова, шаблонные образы (картинки) с размерно-процентными допусками на линии, поверхности. Шаблонные образы (картинки) разделены на короткие диапазоны по ракурсам и дальности наблюдения.
На каждую качественно новую функцию ИИ, затрагивающую весь процесс мышления ИИ, нужно создать новое дерево-Т таблиц решений, встроить это дерево-Т в одну из нижних ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА. В таблицах коэффициенты, вероятности в виде графиков. У 20% слов совпадающие графики.
ИИ-поисковик GE2.0 переводит вопрос в текст на языке-СОМС – Словарь Оптимального Минимума Слов: самые универсальные, самые популярные человеческие слова, понятия для уменьшения числа команд компьютера.
На старте все варианты равновероятны, цифры уточняют алгоритмы.
Вопрос на языке-СОМС сравнивается с моделями понятий. База данных: Энциклопедия для ИИ. Для каждой интернет-энциклопедии определен алгоритм доверия, приоритет. Модели понятий созданы человеком на языке-СОМС, корректируются.
По контексту вопроса поисковик GE2.0 синтезирует свой ответ – синтез-текст на языке-СОМС. По близости к смыслу синтез-текста поисковик ищет ссылки в индексной базе сайтов: в таблицах решений «эталон смысла – сайты».
Ствол ДЕРЕВА АНАЛИЗА СМЫСЛА растет из 6 корней:
Корень-1 видеоканал
Корень-2 звуковой канал
Корень-3 тактильный канал
Корень-4 канал температуры
Корень-5 канал влажность поверхности
Корень-6 ориентация в пространстве и ускорения
Речь идет в фильтры Корня-2 «звуковой канал» ДЕРЕВА АНАЛИЗА СМЫСЛА:
1. фильтр существительных. Существительное – идентификатор объекта. Смысл существительного определит дерево контекстных ограничений смысла существительного. Коэффициент однозначности.
2. фильтр корней слов
3. фильтр глаголов. Глагол – идентификатор действия. Смысл глагола определит дерево контекстных ограничений смысла глагола. Коэффициент однозначности.
4. фильтр прилагательных. Прилагательное – идентификатор параметра объекта. Смысл прилагательного определит дерево контекстных ограничений смысла прилагательного. Коэффициент однозначности.
5. фильтр предлогов. Предлог – идентификатор адресации по объектам
6. фильтр окончаний слов. Окончание слова – ограничитель идентификации параметра, действия
7. фильтр приставок к словам. Приставка к слову – ограничитель идентификации
8. фильтр знаков препинания.
ИИ состоит из:
1. модели контекста (модели мира)
2. дерево анализа смысла
3. дерево синтеза решений
Модель контекста (модель мира) это:
1. дерево анализа материальной структуры + дерево синтеза материальной структуры + база данных
2. дерево анализа энергетической структуры + дерево синтеза энергетической структуры + база данных
3. дерево анализа информационной структуры + дерево синтеза информационной структуры + база данных
Датчиковый корень-1 ДЕРЕВА АНАЛИЗА СМЫСЛА – «видеоканал». Корень-1 делится на:
Ветвь «библиотека ракурсных линейных контуров для распознавания объектов»
Ветвь «библиотека неполных ракурсных контуров»
Ветвь «библиотека аниме-серий ракурсных линейных контуров для распознавания действия»
Ветвь «библиотека структуры поверхностей объектов»
Ветвь «библиотека вариантов обычного цвета объектов»
Датчиковый корень-2 «звуковой канал» делится на:
Ветвь «библиотека звучания слов»
Ветвь «с какими словами могут путать по звучанию слова»
Каждый из 9 датчиковых корней всеми ветвями переходит в нижний единственный ствол ДЕРЕВА АНАЛИЗА СМЫСЛА чтоб наполнить КОНТЕЙНЕР ДАННЫХ и предоставить эти данные всем ветвям ДЕРЕВА АНАЛИЗА СМЫСЛА.
Пройдя через нижний единственный ствол ДЕРЕВА АНАЛИЗА СМЫСЛА выше эти 9 датчиковых корней превращаются в 9 датчиковых Ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА
Каждая из 9 датчиковых Ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА делится на:
Ветвь «ОБЪЕКТ» (объект, ярлык объекта. Существительное, местоимение)
Ветвь «СУБЪЕКТ» (субъект, ярлык субъекта. Существительное, местоимение)
Ветвь «ДЕЙСТВИЕ» (действие объекта, среды. Глагол)
Ветвь «КАЧЕСТВО ОБЪЕКТА» (свойства, параметры объекта. Прилагательное)
Ветвь «КАЧЕСТВО ДЕЙСТВИЯ» (параметры действия. Прилагательное)
ВЕТВЬ «ОБЪЕКТ» делится на:
Ветвь «объект материальный»
Ветвь «объект виртуальный»
Ветвь «объект из энергии»
ВЕТВЬ «СУБЪЕКТ» делится на:
Ветвь «субъект материальный»
Ветвь «субъект виртуальный»
Ветвь «субъект из энергии»
Ветвь «собственное имя субъекта»
ВЕТВЬ «ДЕЙСТВИЕ» делится на:
Ветвь «контактная сила»
Ветвь «сила действующая через поле»
Ветвь «действие волны в жидкости»
Ветвь «действие волны в газе»
Ветвь «действие волны в твердой среде»
Ветвь «действие информации»
Ветвь «действие эмоций»
Ветвь «многостороннее действие»
Ветвь «вектор действия между объектами»
Ветвь «действие между средами»
Ветвь «вектор действия между процессами»
Ветвь «действие в прошлом времени»
Ветвь «действие в реальном времени»
Ветвь «действие в будущем времени»
Ветвь «многостороннее действие» делится на:
Ветвь «один передатчик действия – много приемников действия»
Ветвь «много передатчиков действия – один приемник действия»
Ветвь «много передатчиков действия – много приемников действия»
Ветвь «вектор действия между объектами» делится на:
Ветвь «один передатчик действия – один приемник действия»
Ветвь «один передатчик действия – много приемников действия»
Ветвь «много передатчиков действия – один приемник действия»
Ветвь «много передатчиков действия – много приемников действия»
Ветвь «действие между средами» делится на:
Ветвь «действие в одной среде»
Ветвь «действие между двумя средами»
Ветвь «действие между многими средами»
Ветвь «один передатчик действия – много приемников действия»
Ветвь «много передатчиков действия – один приемник действия»
Ветвь «много передатчиков действия – много приемников действия»
Ветвь «вектор действия между процессами» делится на:
Ветвь «один передатчик действия – много приемников действия»
Ветвь «много передатчиков действия – один приемник действия»
Ветвь «много передатчиков действия – много приемников действия»
Каждая из Ветвей «действие в .... времени» делится на:
Ветвь «длительность действия»
Ветвь «интенсивность действия»
Ветвь «длительность действия» делится на:
Ветвь «максимальный диапазон Х1-Х2 длительности действия для первых 50% наиболее распространенных случаев»
Ветвь «оставшиеся диапазоны»
ВЕТВЬ «КАЧЕСТВО ОБЪЕКТА» делится на:
Ветвь «качество объекта в процентах»
Ветвь «качество признака объекта в процентах».
Оценка качества в предложении относится к объекту, а не к его свойству, если нет прямого уточнения
ВЕТВЬ «КАЧЕСТВО ДЕЙСТВИЯ» делится на:
Ветвь «качество действия в процентах»
Ветвь «качество признака действия в процентах».
ВЕТВЬ «КОЛИЧЕСТВО» делится на:
Ветвь «единицы измерения»
Ветвь «диапазоны»
Ветвь «не все»
Ветвь «все».
Ветвь «все» делится на:
Ветвь «все живые объекты»
Ветвь «все ключевые живые объекты»
Ветвь «все неживые объекты»
Ветвь «все ключевые неживые объекты»
Ветвь «все параметры»
Ветвь «все ключевые параметры».
Ветвь «диапазоны» делится на:
Ветвь «диапазон размеров»
Ветвь «диапазон расстояния»
Ветвь «диапазон энергии»
Ветвь «диапазон трафика»
Ветвь «диапазон параметра объекта».
Ветвь «единицы измерения» делится на:
Ветвь «абсолютные единицы измерения»
Ветвь «относительные единицы измерения»
Ветвь «перевод абсолютных единиц измерения в относительные»
Ветвь «перевод относительных единиц измерения в абсолютные»
Ветвь «битность параметров»
Модель контекста – это шаблон контекста + цифры добавляемые в шаблон.
Модели контекста:
1. граматическая модель контекста
2. физическая модель контекста
3. навигационная модель контекста
4. энергетическая модель контекста
5. химическая модель контекста
6. временная модель контекста
7. приоритетная модель контекста
8. другие модели контекста
Физическая модель контекста это:
1. цифра массы объекта
2. цифры масс объектов внешней среды, с которыми может взаимодействовать объект
3. импульс или момент импульса объекта
4. импульс или момент импульса объектов, с которыми может взаимодействовать объект
5. цифры о форме и размерах объекта
6. цифры о форме и размерах объектов внешней среды
7. цифры координат объекта
8. цифра скорости объекта
9. вектор движения объекта – цифры
Навигационная модель контекста это:
1. цифры координат объекта
2. цифры координат объектов внешней среды, с которыми может взаимодействовать объект
Энергетическая модель контекста это:
1. цифры температуры внешней среды
2. цифры температуры внутри объекта
3. цифры температуры на поверхности объекта
4. цифры теплового потока через поверхность объекта
Химическая модель контекста это:
1. химсостав внешней среды
2. химсостав объекта
3. химсостав поверхности объекта
Временная модель контекста это:
1. мгновенная цифра в реальном времени контекста
2. цифры в прошлом времени контекста
3. цифры в будущем времени контекста
Приоритетная модель контекста – это приоритетный список носителя ИИ, состоящий из пунктов (тем). Чем меньше номер пункта, тем выше его приоритет. В каждом пункте в процентах указан коэффициент его абсолютного приоритета
КОНТЕКСТНЫЕ КАНАЛЫ
Анализ смысла текста по каналам:
Контекстный канал-1: контекст каждого объекта
Контекстный канал-2: контекст каждого действия
Контекстный канал-3: контекст качества каждого объекта
Контекстный канал-4: контекст качества каждого действия
Каждый из 4 контекстных каналов делится на 3 временных контекста: прошлое, настоящее (контекстный диапазон времени), будущее. Таблицы контекстных диапазонов времени.
В предложении контекст слова не определился – алгоритм добавляет в контекст абзацы до и после предложения до определения контекста или выдает «нет контекста».
В каждой ветви база данных (список цифр – параметров слова для разных контекстов) где слова проходят поиск совпадений через папки «Контекст-1», «Контекст-2», «Контекст-3»... С всех папок совпадающая информация идет по всем ветвям в общем КОНТЕЙНЕРЕ ДАННЫХ к выходам ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА.
Выходные ветви от Ветви «ОБЪЕКТ» соединяются вместе в одну общую Выходную Ветвь «объект». Выходная Ветвь «объект» делится на:
Ветвь «материальная структура смысла слова»
Ветвь «энергетическая структура смысла слова»
Ветвь «информационная структура смысла слова».
Каждая с этих трех ветвей соединяется с своей Стандартной Ветвью анализа.
Выходные ветви от Ветви «ДЕЙСТВИЕ» соединяются вместе в одну общую Выходную Ветвь «действие». Выходная Ветвь «действие» делится на:
Ветвь «материальная структура смысла слова»
Ветвь «энергетическая структура смысла слова»
Ветвь «информационная структура смысла слова».
Каждая с этих трех ветвей соединяется с своей Стандартной Ветвью анализа.
Выходные ветви от Ветви «КАЧЕСТВО» соединяются вместе в одну общую Выходную Ветвь «качество». Выходная Ветвь «качество» делится на:
Ветвь «материальная структура смысла слова»
Ветвь «энергетическая структура смысла слова»
Ветвь «информационная структура смысла слова».
Каждая с этих трех ветвей соединяется с своей Стандартной Ветвью анализа.
Каждое слово проходит через свою Стандартную Ветвь анализа. Для каждого слова алгоритмист очищает его Стандартную Ветвь анализа от лишних ветвей для компактности ИИ.
СТАНДАРТНАЯ ВЕТВЬ АНАЛИЗА делится на:
Ветвь «ПАДЕЖ»
Ветвь «РОД»
Ветвь «ЗАПЯТАЯ»
Ветвь «ТОЧКА»
Ветвь «ПРЕРЫВАНИЕ ФРАЗЫ»
Ветвь «ВРЕМЕННАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «НАВИГАЦИОННАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ФИЗИЧЕСКАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ХИМИЧЕСКАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ЦИФРОВАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ОБЪЕКТНАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ТРАНСПОРТНАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ПРИОРИТЕТНАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ПРИЧИННО-СЛЕДСТВЕННАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «КУЛЬТУРНАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ЯЗЫКОВАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ВЕРОЯТНОСТЬ»
Ветвь «ПРОФЕССИОНАЛЬНАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «ЭВОЛЮЦИОННАЯ МОДЕЛЬ КОНТЕКСТА»
Ветвь «АНАЛОГИ»
Ветвь «ВЕРОЯТНОСТЬ ПЕРЕНОСНОГО СМЫСЛА СЛОВА»
Ветвь «ВЕРОЯТНОСТЬ ЛОЖНОЙ КАРТИНЫ МИРА ОТ ВЕРНЫХ ФАКТОВ»
Ветвь «ДЕРЕВО СИНТЕЗА ЦЕЛЕЙ»
Ветвь «МОДЕЛЬ ВЗАИМОДЕЙСТВИЯ МЕЖДУ МОДЕЛЯМИ МИРА»
………
Ветвь «МОДЕЛЬ ВЗАИМОДЕЙСТВИЯ МЕЖДУ МОДЕЛЯМИ МИРА» делится на:
Ветвь «модель взаимодействия между материальной и энергетической моделью мира»
Ветвь «модель взаимодействия между материальной и информационной моделью мира»
Ветвь «модель взаимодействия между энергетической и информационной моделью мира».
Модели взаимодействия между моделями мира имеют между собой обратные связи в реальном времени
Ветвь «ДЕРЕВО СИНТЕЗА ЦЕЛЕЙ» делится на:
Ветвь «власть»
Ветвь «деньги»
Ветвь «карьера»
………
Ветвь «АНАЛОГИ» делится на:
Ветвь «аналоги объекта»
Ветвь «аналоги процесса, действия»
Ветвь «аналоги по качеству»
Ветвь «ВРЕМЕННАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «временное событие связано (нет) с последующим выражением после запятой в предложении»
Ветвь «контекстный диапазон времени события»
Ветвь «последовательность событий»
Ветвь «диапазон времени пауз в последовательности событий»
Ветвь «диапазон времени для каждого события в последовательности событий»
Ветвь «временное ограничения события в контексте»
Ветвь «прошлое»
Ветвь «настоящее» (алгоритм определения контекстного диапазона настоящего времени)
Ветвь «будущее»
Ветвь «временные ограничения события в контексте»
Ветвь «контекстный диапазон времени для действия»
Ветвь «время создания информации»
Ветвь «контроль последовательности действий»
Ветвь «прокрутка назад»
………
Ветвь «прошлое» и Ветвь «будущее» делятся на ветви диапазонов времени.
Ветвь «контроль последовательности действий» делится на:
Ветвь «контроль диапазонов времени в паузах между последовательностью действий»
Ветвь «контроль диапазона времени для каждого действия в последовательности действий»
Ветвь «прокрутка назад» делится на:
Ветвь «прокрутка назад по времени»
Ветвь «прокрутка назад по целям»
Ветвь «прокрутка назад по ключевым фактам»
Ветвь «НАВИГАЦИОННАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «пространственная модель контекста»
Ветвь «динамическая стыковка систем координат двух объектов» (делится на ветви по степеням свободы)
Ветвь «диапазон удаленности объекта от источника информации»
………
Ветвь «пространственная модель контекста» делится на:
Ветвь «направление на объект»
Ветвь «пространственное расположение объекта»
Ветвь «пространственное расположение субъекта относительно объекта» (по умолчанию отсчет размеров начинается с центра объекта или его ключевых точек. информация обрабатывается в процентных единицах)
Ветвь «координаты XYZ»
Ветвь «широта-долгота»
Ветвь «диапазоны масштаба пространства» (диапазоны от элементарных частиц до Вселенной)
Ветвь «направление на объект» делится на:
Ветвь «направление на объект в верхней полусфере»
Ветвь «направление на объект в нижней полусфере»
Ветвь «направление на объект в левой полусфере»
Ветвь «направление на объект в правой полусфере»
Ветвь «пространственное расположение объекта» делится на:
Ветвь «расположение объекта в верхней полусфере»
Ветвь «расположение объекта в нижней полусфере»
Ветвь «расположение объекта в левой полусфере»
Ветвь «расположение объекта в правой полусфере»
Ветвь «диапазон удаленности объекта от источника информации» делится на ветви по уровням пространственного масштаба в контексте. Чем крупнее уровень масштаба, тем больше цифры удаленности объекта от источника информации.
Ветвь «ВЕРОЯТНОСТЬ» делится на:
Ветвь «вероятность идентификации объекта»
Ветвь «вероятность идентификации субъекта»
Ветвь «вероятность данного действия»
Ветвь «вероятность данного качества»
Ветвь «вероятность идентификации ситуации»
Ветвь «процентная вероятность правильного выбора модели мира»
Ветвь «вероятность создания целей объектом»
Ветвь «вероятностная расшифровка паузы, конца фразы»
Ветвь «вероятностный список групп общества использующих данный жаргон»
Ветвь «вероятность идентификации объекта» делится на:
Ветвь «вероятность идентификации общественно известного объекта»
Ветвь «вероятность идентификации малоизвестного объекта»
Ветвь «вероятность идентификации неизвестного объекта»
Ветвь «вероятность идентификации субъекта» делится на:
Ветвь «вероятность идентификации общественно известного субъекта»
Ветвь «вероятность идентификации малоизвестного субъекта»
Ветвь «вероятность идентификации неизвестного субъекта»
Ветвь «вероятность создания целей объектом» делится на:
Ветвь «список целей объекта»
Ветвь «вероятности достижения цели»
Ветвь «процентный коэффициент целенаправленности объекта» (таблицы коэффициентов целенаправленности человечества, стран, организаций, партий, предприятий…)
Ветвь «процентный коэффициент соответствия приоритетному списку целей»
Ветвь «процентный коэффициент польза-вред»
Ветвь «диапазон времени достижения цели»
………
Ветвь «ПРИОРИТЕТНАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «приоритетный список»
Ветвь «процентный коэффициент приоритета (выбор ветвей с более высоким коэффициентом приоритета)»
Ветвь «список временных приоритетов»
Ветвь «список ситуационных приоритетов»
Ветвь «диапазон периода действия приоритета»
Ветвь «борьба групп приоритетов»
Ветвь «иерархическая модель мира»
Ветвь «политическая модель мира»
Ветвь «юридическая модель мира»
………
Ветвь «процентный коэффициент приоритета» делится на:
Ветвь «коэффициент приоритета – диапазон процентной задержки»
Ветвь «коэффициент приоритета – процент получаемой энергии»
Ветвь «коэффициент приоритета – процент трафика информации»
Ветвь «ТРАНСПОРТНАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «логистическая модель контекста»
………
Ветвь «ФИЗИЧЕСКАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «скоростная модель (диапазон скоростей объекта, процесса) контекста»
Ветвь «топливно-энергетическая модель контекста»
Ветвь «температурная модель контекста»
Ветвь «соединение объектов»
Ветвь «диапазон удаленности объекта от источника информации»
Ветвь «габаритная модель контекста»
Ветвь «масштабная модель контекста»
Ветвь «метеорологическая модель контекста»
Ветвь «объектная модель контекста»
………
Ветвь «соединение объектов» делится на:
Ветвь «разъемное физическое соединение материальных объектов»
Ветвь «неразъемное физическое соединение материальных объектов»
Ветвь «неразъемное химическое соединение материальных объектов»
Ветвь «разъемное соединение информационных объектов»
Ветвь «неразъемное соединение информационных объектов»
Ветвь «вероятность неразъемного соединения информационных объектов»
Ветвь «топливно-энергетическая модель контекста» делится на таблицы решений заправки энергией, топливом человека, автомобиля, другой техники, любой живности
Ветвь «ОБЪЕКТНАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «техническая модель контекста»
Ветвь «живые-неживые»
Ветвь «геологическая модель контекста»
Ветвь «сопровождение объекта, процесса, качества»
Ветвь «различение виртуального, реального объектов»
Ветвь «гендерная модель контекста»
Ветвь «эмоциональная модель контекста»
Ветвь «вложенные образы субъекта» (новые оболочки идентификации объектов)
Ветвь «субъект-передатчик действия – субъект-приемник действия»
Ветвь «субъект-передатчик меры качества – субъект-приемник меры качества»
Ветвь «выбор роли пользователем поисковика»
Ветвь «ситуативные модели поведения»
Ветвь «модели действий объекта»
Ветвь «идентификация подавателя, получателя действия»
Ветвь «различия виртуального, реального объектов»
Ветвь «модели действий объекта»
Ветвь «цели объекта»
Ветвь «вопрос или передача информации»
Ветвь «угроза или передача информации»
………
Ветвь «живые-неживые» делится на:
Ветвь «неживой объект»
Ветвь «зоологическая модель контекста»
Ветвь «ботаническая модель контекста»
Ветвь «микробиологическая модель контекста»
Ветвь «цели объекта» делится на:
Ветвь «угроза в процентах»
………
Ветвь «модели действий объекта» делится на:
Ветвь «модель личности»
Ветвь «эмоциональный тип»
Ветвь «тип мышления»
Ветвь «целевой тип»
Ветвь «тип речи»
………
Ветвь «различия виртуального, реального объектов» делится на:
Ветвь «виртуальный объект»
Ветвь «реальный объект»
Ветвь «идентификация подавателя, получателя действия» делится на:
Ветвь «идентификация подавателя действия»
Ветвь «идентификация получателя действия»
Ветвь «сопровождение объекта, процесса, качества» делится на:
Ветвь «физическое сопровождение объекта»
Ветвь «информационное сопровождение объекта»
Ветвь «физическое сопровождение процесса»
Ветвь «информационное сопровождение процесса»
Ветвь «физическое сопровождение качества»
Ветвь «информационное сопровождение качества»
Ветвь «ЦИФРОВАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «величина»
Ветвь «абсолютная величина»
Ветвь «относительная величина».
Ветвь «величина» делится на:
Ветвь «величина одномерная»
Ветвь «величина двухмерная»
Ветвь «величина трехмерная»
Ветвь «величина табличная».
Ветвь «степень свободы перемещения» делится на:
Ветвь «свобода перемещения 1D»
Ветвь «свобода перемещения 2D»
Ветвь «свобода перемещения 3D»
Ветвь «эмоции» делится на:
Ветвь «эмоция-1»
Ветвь «эмоция-2»
Ветвь «эмоция-N»
Ветвь «процентный уровень эмоции-N передаваемый словом»
………
В ДЕРЕВЕ АНАЛИЗА есть:
Ветвь «Тематические диапазоны уровней обобщения контекста» и Ветвь «параметры контекста» которая делится на:
Ветвь-1 «параметры объекта»
Ветвь-2 «параметры действия»
Ветвь-3 «параметры качества»
Каждая из 3 ветвей отдельно делится на:
Ветвь «самые вероятные параметры в контексте»
Ветвь «верхние границы диапазонов вероятности параметров в контексте»
Ветвь «нижние границы диапазонов вероятности параметров в контексте»
Каждое слово привязано к процентному графику вероятности истинности цифры слова в контексте. Примеры цифр слов:
1. слово «время» привязано к цифровой временной шкале «прошлое – настоящее – будущее» процентной вероятностью истинности (график) данной цифры (диапазона цифр) времени. Одни цифры более вероятны, другие менее: вероятность 0-100%. Примерные цифры (диапазоны цифр) заранее вложены в контекстную базу данных слова «время».
2. слово «движение» привязано к скорости и вектору движения процентной вероятностью истинности цифр (диапазона цифр) скорости, вектора движения. Одни цифры более вероятны, другие менее: вероятность 0-100%. Примерные цифры (диапазоны цифр) заранее вложены в контекстную базу данных слова «движение».
3. слово «быстрый» привязано к скорости (угловой, поступательной) процентной вероятностью истинности цифры (диапазона цифр) скорости.
4. слово «нагревается» (объект, среда) привязано к температуре и скорости нагрева процентной вероятностью данных значений (диапазонов) температуры, скорости нагрева, скорости теплопотока. Примерные диапазоны цифр заранее вложены в контекстную базу данных слова «нагревается».
5. слово «красный» (цвет) привязано к всем оттенкам красного цвета процентной вероятностью данного значения (диапазона) цифры цвета. Примерные диапазоны цифр цвета заранее вложены в контекстную базу данных слова «красный».
В контекстной базе данных слова есть информация где в разном контексте произношения ставить ударение в словах, тайминги букв и пауз.
Диапазон вероятности параметра контекста – часть графика вероятности параметра в контексте, в которой вероятность параметра больше 50%. Остальную часть графика используют только медленные алгоритмы с высоким уровнем обобщения слов и сверхвысоким числом параллельных каналов обработки информации.
Верхняя граница диапазона вероятности параметра в контексте – максимальное значение цифры параметра в контексте, при которой вероятность истинности параметра > 50%. Нижняя граница диапазона вероятности параметра в контексте – минимальное значение цифры параметра в контекста, при которой вероятность истинности параметра > 50%
ЦИФРОВАЯ МОДЕЛЬ СЛОВА: в каждой папке «Контекст слова» цифровая модель слова, сопутствующая информация. Цифровая модель слова – это собственные цифровые диапазоны параметров слова, цифры односторонних и двухсторонних обратных связей с другими цифровыми моделями слова с других аналогичных папок. Цифровой модели слова цифры: таблицы ограничений, процентные вероятности, процентные приоритеты, тайминги, расстояния, параметры скорости...
Верхние, нижние границы диапазона вероятности параметра в контексте нужны для роста числа параллельных каналов работы обработки информации в алгоритме. Алгоритм не может параллельно обрабатывать два канала обработки информации если их наиболее вероятные параметры несовместимы (не стыкуются) в модели (в картине) контекста.
Если вместо двух наиболее вероятных параметров двух каналов обработки информации использовать два диапазона двух параметров с вероятностью истинности > 50% – есть шанс совместить (состыковать) оба канала обработки информации. Совместить (состыковать) два параметра – означает найти связь, взаимозависимость между ними для вычисления прогноза ситуации перемножением вероятностей в точке пересечения графиков их диапазонов.
Для пересечения графиков их диапазонов должно выполняться условие связи, взаимозависимость между ними. Пример: в модели движения автомобиля скорость зависит от бокового ускорения автомобиля на повороте. Боковое ускорение превысит предельную цифру – занос автомобиля снизит скорость прохождения трассы. Здесь связь, взаимозависимость между цифрой (параметр) скорости и цифрой бокового ускорения.
Если скорость автомобиля слишком мала связь, взаимозависимость параметров исчезает: эти цифры или их графики (диапазоны вероятности параметра в контексте) не влияют друг на друга. Прогноз ситуации в контексте – поиск цифр взаимовлияния параметров в контексте + поиск предельных параметров (цифр) этого взаимовлияния.
Предельных параметров обычно два:
1. максимальная цифра диапазона взаимозависимости: из-за чрезмерной скорости автомобиля превышено предельное боковое ускорение – связь двух параметров исчезла из-за заноса
2. минимальная цифра диапазона взаимозависимости: скорость автомобиль чрезмерно мала – он не может превысить предельное боковое ускорение – связь двух параметров исчезла
ВЗАИМОВЛИЯНИЕ ДВУХ МОДЕЛЕЙ МИРА
Взаимовлияние двух моделей мира ИИ вычисляет по каналам базы двух моделей мира. База – список общих цифровых каналов двух моделей мира. Для каждой темы в Базе данных ИИ есть приоритетный список моделей мира. По порядку приоритета просчитываются базы моделей мира – получаем цифры первичных баз. Просчитываются пары первичных баз – получаем цифры вторичных баз. Аналогично повтор процесса до окончания расчетов. Количество используемых моделей мира определяет лимит времени на вычисления в данном контексте в Базе данных ИИ
Ветвь «ЯЗЫКОВАЯ МОДЕЛЬ КОНТЕКСТА» делится на:
Ветвь «объекты»
Ветвь «действие»
Ветвь «качество»
Ветвь «гипербола»
Ветвь «род»
Ветвь «обобщение»
Ветвь «смысл многозначного слова»
Ветвь «масштаб слова»
Ветвь «распознавание обрыва или сокращения предложения, словосочетания»
Ветвь «смысл многозначного слова»
Ветвь «идентификация подавателя, получателя действия»
Ветвь «контроль последовательности действий»
Ветвь «модели перехвата (оперирования) словесного образа (качества, объекта, действия)»
Ветвь «списки уточнения»
Ветвь «минимизация списка признаков»
Ветвь «побуквенная интонация произношения»
Ветвь «жаргонная модель контекста»
Ветвь «грамматическая модель контекста»
Ветвь «идентификация основных тем текста»
Ветвь «стиль передачи информации»
Ветвь «уровень грубости слов»
Ветвь «вероятность человеческого вымысла»
………
Ветвь «распознавание обрыва или сокращения предложения, словосочетания» делится на:
Ветвь «не сокращенное предложение, словосочетание»
Ветвь «сокращенное предложение, словосочетание»
Ветвь «качество» делится на:
Ветвь «качество в единственном числе» (переходит в Ветвь «процентная вероятность качества в единственном числе»)
Ветвь «качества в множественном числе» (переходит в Ветвь «процентная вероятность качеств в множественном числе»)
Ветвь «модели качества объекта»
Ветвь «параметры действия объекта»
Ветвь «действие» делится на:
Ветвь «действие в единственном числе» (переходит в Ветвь «процентная вероятность единственного числа действия»)
Ветвь «действия в множественном числе» (переходит в Ветвь «процентная вероятность действий в множественном числе»)
Ветвь «модели действий объектов» (параметры некоторых действий увязаны по времени с координатами пространства в моделях)
Ветвь «модели качества действия»
Ветвь «объекты» делится на:
Ветвь «объект в единственном числе» (переходит в Ветвь «процентная вероятность единственного числа объекта»)
Ветвь «объекты в множественном числе» (переходит в Ветвь «процентная вероятность множественного числа объектов»)
Ветвь «модели объектов»
Ветвь «модели качества объекта»
Ветвь «иерархия объектов предложения»
………
Ветвь «списки уточнения» делится на:
Ветвь «список заменителей букв (человек часто неправильно меняет буквы в слове на парные по звучанию) в словах на парные по звучанию»
Ветвь «список заменителей букв в словах на ошибочные (в нажатии) парные в клавиатуре»
Ветвь «списки сопутствующих объектов в предложении или моносмысловом абзаце»
Ветвь «смысл многозначного слова» делится на:
Ветвь «распознание смысла по вероятности»
Ветвь «распознание смысла по количеству контекстных связей»
Ветвь «род» делится на:
Ветвь «мужской род»
Ветвь «женский род»
Ветвь «средний род».
Ветвь «гипербола» делится на ветви масштабов гиперболы (масштаб в диапазонах)
Ветвь «побуквенная интонация произношения» делится на:
Ветвь «контекстная пауза между словами в произношении» (таблицы решений)
Ветвь «контекстная длина паузы для каждой пары букв» (таблицы решений)
Ветвь «стиль передачи информации» делится на:
Ветвь «стиль литературный»
Ветвь «стиль официальный»
………
Ветвь «масштаб слова» делится на ветви:
Ветвь «масштаб слова в контексте фразы»
Ветвь «масштаб слова в контексте текста»
Ветвь «применимость слова к контексту» делится на:
Ветвь «территория применимости слова с вероятностью 50%»
Ветвь «временной диапазон применимости слова с вероятностью 50%»
Ветвь «сценарии контекста» делится на:
Ветвь «сценарий движений»
Ветвь «энергетический сценарий»
Ветвь «сценарий изменения цвета»
………
Ветвь «тон речи» делится на:
Ветвь «выбор тона речи»
Ветвь «распознавание тона речи»
Ветвь «выбор тона речи» и Ветвь «распознавание тона речи» каждая отдельно делятся на:
Ветвь «смысловой тон речи»
Ветвь «звуковой тон речи»
Ветвь «смысловой тон речи» делится на:
Ветвь «смысловой вопросительный тон речи»
Ветвь «смысловой утверждающий тон речи»
Ветвь «смысловой отрицающий тон речи»
Ветвь «смысловой предупреждающий тон речи»
Ветвь «смысловой угрожающий тон речи»
Ветвь «звуковой тон речи» делится на:
Ветвь «звуковой вопросительный тон речи»
Ветвь «звуковой утверждающий тон речи»
Ветвь «звуковой отрицающий тон речи»
Ветвь «звуковой предупреждающий тон речи»
Ветвь «звуковой угрожающий тон речи»
Тон речи – непроизносимый вслух список просьб или требований к собеседнику. Каждый тон речи имеет свой список требований к собеседнику. Нейтральный тон речи тоже имеет список требований к собеседнику. Тон речи – это эмоциональная окраска речи
Ветвь «местоимение» делится на:
Ветвь «на какой объект указывает местоимение»
Ветвь «кто получатель информации об объекте местоимения».
Ветвь «знание субъектом события» делится на:
Ветвь «субъект знал о событии до вопроса собеседника»
Ветвь «субъект не знал о событии до вопроса собеседника»
Ветвь «проверка параметров объекта» делится на:
Ветвь «параметры объекта изменились»
Ветвь «параметры объекта не изменились»
Ветвь визуальная проверка изменений объекта»
Ветвь «тактильная проверка изменений объекта»
В базу данных этих ветвей входят признаки фиксируемого уровня изменений объектов (список объектов, их параметров и признаков изменения параметров)
Ветвь «отправитель информации или действия – адресат-получатель информации или действия» делится на:
Ветвь «вероятность достижения отправителем цели отправки информации или действия»
Ветвь «вероятность получения информации или действия адресатом-получателем»
Ветвь «ссылка на информацию» делится на:
Ветвь «информация + её адрес»
Ветвь «алгоритм + адрес данных»
Ветвь «прерывание фразы для вставки комента, уточнения или ссылки» делится на:
Ветвь «прерывание единицы смысла-1 фразы для вставки комента, уточнения или ссылки (+ вставка запятой, скобки или тире)»
Ветвь «прерывание единицы смысла фразы для вставки комента, уточнения или ссылки для продолжения фразы (+ вставка запятой, скобки или тире)».
Единица смысла – это «объект + действие», объект + его качество», «сравнение объектов», «взаимодействие объектов»
Ветвь «прерывание фразы» делится на:
Ветвь «прерывание фразы по признаку перемены темы»
Ветвь «прерывание фразы источником фразы»
Ветвь «прерывание фразы по внешним причинам»
Ветвь «варианты контекстного смысла слова» делится на:
Ветвь «слова контекстный смысл-1»
Ветвь «слова контекстный смысл-2»
………
Ветвь «слова контекстный смысл-1» делится на:
Ветвь «вариант-1 контекстных слов для слова с контекстным смыслом-1»
Ветвь «вариант-2 контекстных слов для слова с контекстным смыслом-1»
………
Ветвь «физическое взаимодействие объектов» делится на:
Ветвь «взаимодействие на макроуровне»
Ветвь «взаимодействие на молекулярном уровне»
Ветвь «взаимодействие на атомном уровне»
Ветвь «взаимодействие на атомном уровне делится на:
Ветвь «взаимодействие на уровне электростатических, магнитных, электромагнитных полей»
Ветвь «взаимодействие на уровне механических волн в среде»
Ветвь «взаимодействие на уровне гравитационного поля»
Ветвь «взаимодействие на уровне молекулярных реакций»
Ветвь «взаимодействие на уровне атомных реакций»
Ветвь «химическое взаимодействие объектов» делится на:
Ветвь «взаимодействие – реакция с выделением тепла»
Ветвь «взаимодействие – реакция с выходом ударной волны»
Ветвь «взаимодействие – реакция с поглощением тепла»
Ветвь «взаимодействие – токсичная реакция»
Ветвь «двигать» делится на:
Ветвь «линейно двигать объект»
Ветвь «вращать объект»
Ветвь «линейно двигать одновременно несколько объектов»
Ветвь «вращать одновременно несколько объектов вокруг общей оси»
Ветвь «вращать одновременно несколько объектов вокруг разных осей»
Ветвь «линейно двигать газ»
Ветвь «вращать газ»
Ветвь «создать волну в газе»
Ветвь «линейно двигать жидкость»
Ветвь «вращать жидкость»
Ветвь «создать волну в жидкости»
Ветвь «линейно двигать электрическое поле»
Ветвь «вращать электрическое поле»
Ветвь «создать волну электрического поля»
Ветвь «линейно двигать магнитное поле»
Ветвь «вращать магнитное поле»
Ветвь «создать волну магнитного поля»
Ветвь «линейно двигать гравитационное поле»
Ветвь «создать гравитационную волну»
Ветвь «двигается» делится на:
Ветвь «объект двигается линейно»
Ветвь «объект вращается»
Ветвь «линейно двигаются одновременно несколько объектов»
Ветвь «вращаются одновременно несколько объектов вокруг общей оси»
Ветвь «вращаются одновременно несколько объектов вокруг разных осей»
Ветвь «линейно двигается газ»
Ветвь «газ вращается»
Ветвь «идет волна в газе»
Ветвь «жидкость двигается линейно»
Ветвь «жидкость вращается»
Ветвь «идет волна в жидкости»
Ветвь «электрическое поле двигается линейно»
Ветвь «электрическое поле вращается»
Ветвь «идет волна электрического поля»
Ветвь «магнитное поле двигается линейно»
Ветвь «магнитное поле вращается»
Ветвь «идет волна магнитного поля»
Ветвь «гравитационное поле двигается линейно»
Ветвь «гравитационное поле вращается»
Ветвь «идет гравитационная волна»
Ветвь «пропущенное для краткости текста слово в предложении» делится на:
Ветвь «пропущенное в правой смысловой единице предложения слово берем с аналогичной левой смысловой единицы предложения»
Ветвь «пропущенное в левой смысловой единице предложения слово берем с аналогичной правой смысловой единицы предложения».
Аналогичность смысловой единицы предложения определяют по схожим признакам:
1. имя + глагол
2. существительное + прилагательное
Ветвь «контекстно ведущее – ведомое слова» делится на Ветвь «контекстно ведущее слово», Ветвь «контекстно ведомое слово».
Ведущее слово – слово смысл которого не зависит от ведомого слова. Ведомое слово – слово смысл которого зависит от ведущего слова. Ветвь «контекстно ведомое слово» делится на Ветвь «ведомое слово – толкование-1», Ветвь «ведомое слово – толкование-2», Ветвь «ведомое слово – толкование-N»
У каждого слова есть:
1. база данных его толкования как ведомого слова в зависимости от группы сопрягаемых слов
2. база данных его толкования как ведущего слова в зависимости от группы сопрягаемых слов
3. база данных «какое слово ведущее в паре или тройке слов»
4. база данных «какое слово ведомое в паре или тройке слов»
В каждой ветви ДЕРЕВА АНАЛИЗА СМЫСЛА свой диапазон коэффициентов приоритета. Коэффициент приоритета стал ниже диапазона – ветвь выключится из процесса. Процентные коэффициенты целенаправленности группы людей, человечества
Коэффициент обязательности КО оценивает в процентах категоричность требования человека или организации. КО < 50% – просьба с разным уровнем настойчивости. КО 50% – требование вышедшее на начальный уровень угрозы. КО 100% – это готовность применить насилие за невыполнение требования
Принцип параллельного приоритета: вначале быстроисполняемые алгоритмы, в конце самые приоритетные с заменой скоростных результатов на более приоритетные
Модели понятий в стандартных шаблонах: шаблон + файл процентные уточнения + файл масштабы. Ветви шаблонов делятся на: Ветвь «недостроенный шаблон», Ветвь «готовый шаблон», Ветвь «лучший шаблон (эталон)», Ветвь «нет шаблона». Каждая с ветвей «модель мира» переходит в свои ветви «модель действий объекта».
Все ветви ДЕРЕВА АНАЛИЗА СМЫСЛА – единые для всех слов языка-СОМС исполняемые программы, обслуживаемые индивидуальной информацией из баз данных слов. Информация баз данных слов чаще хранится в форме краткого набора цифр (диапазоны…) для ветвей ДЕРЕВО АНАЛИЗА СМЫСЛА.
КОНТЕЙНЕРЫ ДАННЫХ всех выходных ветвей ДЕРЕВА АНАЛИЗА СМЫСЛА идут в соответствующие входы ветвей ДЕРЕВА СИНТЕЗА РЕШЕНИЙ. Каждая ветвь ДЕРЕВА СИНТЕЗА РЕШЕНИЙ определяет слова, цели, приоритеты целей в моделях контекста.
Ветви ДЕРЕВА АНАЛИЗА СМЫСЛА разветвляются в ветви моделей целей. Ветви моделей цели разветвляются в ветви анализа цели. Ветви анализа целей разветвляются на ветви анализа процентных приоритетов целей. Ветви анализа процентных приоритетов целей переходят в ветви синтеза целей на ДЕРЕВЕ СИНТЕЗА РЕШЕНИЙ. Далее до выхода в конечный ствол ДЕРЕВА СИНТЕЗА РЕШЕНИЙ количество ветвей всегда уменьшается, ветви срастаются, КОНТЕЙНЕРЫ ДАННЫХ заполняются информацией.
Ветви анализа целей переходят в ветви процентных приоритетов целей. Ветви процентных приоритетов целей переходят в ДЕРЕВО СИНТЕЗА РЕШЕНИЙ
Ветви ДЕРЕВА АНАЛИЗА СМЫСЛА разветвляются в ветви анализа баланса «приоритет – цена действия». Ветви анализа баланса «приоритет – цена действия» переходят в ветви выбора баланса «приоритет – цена действия» в ДЕРЕВЕ СИНТЕЗА РЕШЕНИЙ. Ветви выбора баланса «приоритет – цена действия» переходят в ветви синтеза действий.
Ветви синтеза действий срастаясь переходят в конечный ствол ДЕРЕВА СИНТЕЗА РЕШЕНИЙ.
В голосовой версии поисковика ветви анализа звука переходят в ветви синтеза происхождения звука.
Количество ветвей любой модели контекста ограничено, как ограниченно понимание внешней среды человеком
Крупные ветви ДЕРЕВА АНАЛИЗА СМЫСЛА, ДЕРЕВА СИНТЕЗА РЕШЕНИЙ: «двигатель», «движитель», «средство управления», «навигатор», «датчик», «рабочий орган (исполнительный элемент)», «средство транспортировки», «линия передачи информации», «линия передачи энергии»…
Ветвь «ответственность» в ДЕРЕВЕ АНАЛИЗА СМЫСЛА и в ДЕРЕВЕ СИНТЕЗА РЕШЕНИЙ разветвляется на ветви: «ответственность юридическая», «ответственность фактическая», «ответственность моральная».
В анализе смысла предложения Ветвь «объекты» делится на число объектов в предложении: в одной ветви идёт анализ предложения с объектом-1, в другой ветви анализ предложения с объектом-2. И так далее.
ИИ-поисковик оценивает информацию с точки зрения своего приоритетного списка целей. Часть алгоритмов обоих деревьев унифицированы. Для каждого понятия статистика ИИ корректирует приоритетный (проценты приоритета) список моделей контекста, модели понятий.
Иностранные языки заранее переведены в язык-СОМС иностранного языка. Языки-СОМС всех языков взаимно унифицированы таблицами соответствия смысла понятий, словосочетаний. Каждое слово языка-СОМС имеет свою базу данных с ссылками в базы данных других слов.
Перевод некоторых слов на языке-СОМС требует несколько слов другого языка-СОМС. Каждое новое слово можно заменить 2-8 старыми словами. В общении в функционально развитых языках мира используют обычно 800-2000 слов. При переводе текста на иностранный язык ИИ получает на языке-СОМС синтез-текст. Синтез-текст языка-1 переводится в синтез-текст языка-2, далее на обычный язык с дополнениями (алгоритм стилизации) до стиля первоисточника.
ШАБЛОНЫ ПОНЯТИЙ, АЛГОРИТМОВ.
Понятие человеческого языка описывают одна или несколько математических моделей. Математическая модель – уравнение с одной или несколькими переменными + вероятные значения переменных в виде цифр или диапазонов цифр. Простое понятие описывает одно уравнение, сложной понятие – матрица (таблица решений) уравнений.
Половина уравнений в разных моделях понятий практически совпадают по входным и выходным цифрам – всё в природе описывают единые законы применимые к разным понятиям – привязываем их к цифровым шаблонам понятий.
Вычисляем выходные цифры шаблона, отправляем их в разные модели понятий в реальном времени. Синхронизацию выходных цифр с моделями понятий выполнят алгоритмы синхронизации.
Алгоритм синхронизации – таблица фазы или таблица таймерного времени привязанная к шаблону. Есть связки «шаблон – алгоритм синхронизации». У алгоритмов синхронизации есть шаблоны алгоритмов. Поиск универсальных шаблонов, универсальных типов связей между ними.
ПОИСК ПОХОЖИХ ИЗОБРАЖЕНИЙ: алгоритм создает словесное описание картинки – аналоги картинки в индексной базе словесных описаний картинок.
ПОИСК ПОХОЖИХ РЕЧЕВЫХ АУДИОФАЙЛОВ: алгоритм по аудиофайлу создает словесное описание – аналоги в индексной базе словесных описаний.
Алгоритм распознавания речевых аудиофайлов имеет акустические базы данных.
Акустическая база-1: таблицы решений «слово – акустический аналог».
Акустическая база-2: таблицы решений «слово – сходные по звучанию слова».
Акустическая база-3: таблицы решений «слово – схожие по звучанию акустически искаженные слова».
Акустическая база-4: таблицы решений «слово – произношение этого слова с искаженными буквами».
Акустическая база-5: таблицы решений «слово – связки этого слова с другими словами, с их искаженными версиями».
Получив 1-й раз запрос по писателю, ИИ-поисковик выдав результат, найдет в индексной базе email писателя, шлет вопрос: есть сайт, где купить книги? Получив ответ поисковик ставит на позицию-1 результатов выдачи сайт этого писателя, на позицию-2 указанный им книжный интернет-магазин.
«А или В» смыслом одинакова с «А и/или В».
Связисты Чингисхана вставляли ключевые слова в стандартные известные солдатам стихи. Передавали. Требовалось запомнить (имя, время…) ключевые слова. В современном аналоге вместо стихов стандартные тексты. По линии передаём номер текста в списке стандартных текстов, ключевые слова, номера слов текста или пробелов между ними, после которых ключевые слова.
ИИ-поиск решит проблему дублирования смысла текстового, голосового контента, отсутствия мировой новизны.
ИНСТИТУТ ДИССЕРТАЦИЙ: ИИ-поисковик изменит институт диссертаций: люди будут создавать сайт с своими идеями, ставить его содержание на голосование форумов научных сайтов с тремя голосующими форумами.
В форуме-1 (F1) голосуют профессионалы, в форуме-2 (F2) полупрофессионалы, в форуме-3 (F3) любители. Форум-2 может голосованием дать статус полупрофессионала любителю. Форум-1 может голосованием дать статус профессионала полупрофессионалу. Определенное количество элиты форума выдвигается на голосование в вышестоящий форум для перехода в более высокий статус на стандартное время.
Предложенная на голосование научная работы по итогам голосования вставляется в индексную базу с указанием её оценки (в процентной системе), приоритета в данной теме. Оценка, приоритет определяются при голосовании. В индексной базе указываются результаты голосования трех форумов.
В научном форуме лучшей научной работой 20 века в области физики скорее всего признали бы диссертацию Нильса Бора про строение атома водорода, уместившейся в 1 странице. За 19 век скорее всего лучшими признали бы работы Майкла Фарадея.
ИИ на обычных алгоритмах отличается от ИИ нейронных сетей тем, что:
1. логически прозрачен. Можно протоколировать каждый шаг алгоритма. Каждый шаг алгоритма однозначен
2. полностью предсказуем в смысле безопасности для общества. Если ИИ нелоялен к пользователю, настраиваем его уровень лояльности: слегка изменим некоторые таблицы решений, процентные коэффициенты ИИ на обычных алгоритмах. На уровне интеллекта это не отразится. Реакция ИИ нейронных сетей в сложных случаях непредсказуема, любая реакция ИИ на обычных алгоритмах точно просчитываема
3. ИИ на обычных алгоритмах легко оптимизируется по расходу энергии на обучение или работу. Нейронный ИИ требует в тясячи раз больше энергии на обучение, в десятки раз больше энергии на работу.
4. для нейронного ИИ вероятность создать антивирус по алгоритмам работы ИИ слишком мала для военных и некоторых коммерческих целей
5. ИИ на обычных алгоритмах отличает от нейронного ИИ универсальность, быстрота перехода на новые темы, легкость обобщения понятий, быстрота создания целей
6. уровень интеллекта нейронного ИИ прямо зависит от качества баз данных, на которых он тренировался и не даст ничего, чего нет в базах данных. В вопросах без подходящих баз данных, например для изобретательства или интуиции, требуется обобщенное абстрактное мышление, в котором ИИ на обычных алгоритмах как универсальная система алгоритмов и абстрактных моделей, имеет подавляющее превосходство над нейронными сетями с машинным обучением
7. ИИ на обычных алгоритмах превосходит ИИ нейронных сетей в задачах требующих логики, планирования; поиска связей между объектами, процессами
8. в задачах имеющих однозначное решение ИИ нейронных сетей могут обмануть специалисты по алгоритмам. ИИ на обычных алгоритмах маловероятно обмануть
9. ИИ на обычных алгоритмах потребляет энергии и памяти компьютера в тысячи раз меньше ИИ нейронных сетей
10. ИИ на обычных алгоритмах сначала эволюционирует медленно, затем скорость эволюции начнет расти в квадрате. Нейронный ИИ эволюционирует линейно
11. у ИИ на нейронных сетях усреднённое значение интеллекта. ИИ на обычных алгоритмах дает интеллект предельно высокого значения за счет простоты отбора базы данных, алгоритмов.
12. у ИИ на обычных алгоритмах нет галлюцинаций в отличие от ИИ на нейронных сетях
13. ИИ на обычных алгоритмах можно по решению Суда идеально очистить от юридических признаков конфликтной авторской собственности, оставив всё остальное. С нейронным ИИ это не получится.
Упорядочение списков поисковика:
1. тема
2. по убыванию популярности запроса
3. по убыванию даты
4. по убыванию распространенности слова
5. по популярности информации по профессиям. Профессии по тематическому, алфавитному признаку
6. географический признак
7. по гендерному признаку интереса к информации по убыванию популярности или в ином порядке
8. по убыванию эмоциональной реакции на информацию
9. страны происхождения информации
10. по профессиям происхождения информации
В ИИ-поисковике GE2.0 кнопка «поиск» слева, справа поисковой строки: длинный вопрос – она удлиняется вниз, к краю экрана. Номера страниц результатов слева поисковой страницы. ИИ-поисковик при поиске учитывает количество сопутствующих слов. Компьютерные языки заменит моя семантическая операционная система
69)
ТЕОРИЯ ЭВОЛЮЦИИ: (статье 6 раз вредили) информационный протокол человека – ДНК: 10млрд молекул: максимум 6Гбит кода ДНК. Практически 0,4Гбит – большая часть генокода многочисленные резервные копии функциональных фрагментов кода ДНК, выполняющих одну законченную строительную функцию организма человека. Функциональные фрагменты кода ДНК объединяют функцией коды базы данных, алгоритмов строительства организма.
Сцепку функциональных фрагментов кода ДНК между собой ограничит пакет ограничений чтоб ДНК не путала функциональный фрагмент с мусорной копией кода. Пакет ограничений запрещает прямое соединение некоторых функциональных фрагментов кода ДНК. Старение ДНК: уменьшение числа резервных копий ниже критической цифры: ДНК не найдёт участок кода регенерации.
Достижение бессмертия: геноинженеры вирусом-корректором добавляют вместе с резервными копиями в ДНК фрагменты кода бессмертия. Фрагмент-1 кода бессмертия аналогично компьютерному антивирусу уничтожит мусорный генокод, не прошедший процедуру голосования (3 голоса резервных копий) при делении ДНК на 2 части. Затем фрагмент-2 увеличит до нормы число резервных копий функциональных фрагментов кода ДНК. Затем фрагмент-3 уничтожит запрещенные соединения функциональных фрагментов кода ДНК. Затем фрагмент-4 уничтожит лишний код выходящий за технологический предел 5Гбит кода ДНК.
Эволюция жизни: появление нового полезного функционального фрагмента кода ДНК из-за радиации, вредной химии, которые разрушением отдельных букв (аминокислот) кода ДНК меняют последовательность букв генокода, случайно создавая новый функциональный фрагмент кода ДНК, давая потомству новое генетическое качество. Нет радиации, вредной химии в экологической нише – нет эволюции. Удаление букв кода ДНК обезьяны в радиационно (химически) зараженной территории привело к потере 2-х хромосом, превращению обезьяны в человека.
У человека 5 пальцев в руках и ногах потому, что цифра 5 имеет с числом аминокислот ДНК тип связи уменьшающий код ДНК рук, ног человека. Эволюция ДНК стремится к минимуму кода ДНК для каждой функции организма человека. Чем дольше эволюция человека, тем проще и компактнее ДНК.
48 хромосом обезьян, у человека 46 – больше вероятность появления новых функциональных фрагментов кода ДНК удалением отдельных букв генокода радиацией, вредной химией. Чем древнее генокод, тем он технологически (не функционально) проще, компактнее.
Все живое на планете создала эволюция с одного единственного ОДНОКЛЕТОЧНОГО (удалило государство) организма, о чем говорят одинаковые 4 нуклеотида (всего 4 хотя возможны тысячи), 20 аминокислот (всего 20 хотя возможны тысячи), одинаковый информационный протокол РНК-ДНК всех форм жизни.
В природе разумная жизнь всегда происходит от простого к сложному. Человека, всё живое на планете создала ЭВОЛЮЦИЯ (удалило государство) с одного единственного ОДНОКЛЕТОЧНОГО (удалило государство) организма за 3 млрд лет.
В океане есть червь питающийся нефтью глубоководных месторождений. Комбинируя гены червя, человека геноинженер создаст супермена: питается нефтепродуктами (10 раз дешевле, не портятся при хранении)
ЗАКОН-1 ЭВОЛЮЦИИ: эволюция идет скачкообразно. Стадия медленной эволюции заканчивается с появлением качественно нового технологического механизма (типа нового файла с расширением .exe) эволюции, вызывающего скачок эволюции. Затем до очередного качественно нового технологического механизма эволюция идет медленно
ЗАКОН-2 ЭВОЛЮЦИИ: чем быстрее идет эволюция, тем меньше вероятность тупиковых ветвей эволюции.
Несколько процентов генокода человека от вирусов. Для защиты от иммунной системы геноинженер создаст вирус-корректор-1, заменяющий работающий генокод человека до тюнинг-версии-1. Иммунная система человека фрагментом нового генокода запрограммирована на нет противодействия новому, старому генокодам.
Скорость замены генокода от времени полной регенерации (замены) всех клеток костей человека: от года у детей до 10лет у 60-летних. Полная регенерация сухожильных тканей человека среднего возраста: 3 месяца. Регенерация отдельного растянутого сухожилия: 10 дней. Полная регенерация раздавленного нагрузкой хрящевого диска между позвонками: 21 день. Регенерация всех клеток мозга: 2 месяца.
Вирус-корректор-2 меняет генокод человека до тюнинг-версии-2, затем вирусом-корректором-3 до тюнинг-версии-3 и так далее.
Чтоб человек выдержал конкуренцию с новой более совершенной формой разумной жизни – андроидами, геноинженеры:
1. уменьшат число обязательных химических элементов организма человека
2. возможность широкой замены одних химических элементов другими
3. увеличат процент неорганических материалов организма человека для выживаемости в условиях вакуума, радиации, бактерий, вирусов, избавления от запаха постоянно разлагающейся органики. Для колонизации других звезд
4. замена пищи усвоением долго не портящейся органики типа нефтепродуктов
5. заменят волосы тонкой жировой прослойкой для выживаемости в условиях голода, холода, упрощения ремонта
6. упростят конструкцию человека: 3 пальца на кисти, 6 ребер, 8 позвонков, 50 мышц, уберут пальцы в ногах (чтоб не мёрзли)…
7. избавят от жидкостей организм. В идеале: выживаемость на уровне андроидов чтоб они не считали дохлым слизняком, млекопитом тупорылым, эволюционным мусором, свалкой Истории
Топливо мозга сахар – не пища для человека, если молекула C12H22O11 закручена не в левую, а в правую сторону. Все аминокислоты человека – левой закрутки молекул, «правые» иногда ядовиты. «Левые» устойчивее к ультрафиолету
70)
СОФТ МОЗГА. (статье 6 раз вредили) Больше частота, скорость изменения сила тока управляющих электроимпульсов мозга в мышцы – сильнее, быстрее, выносливее человек. Усталость: софт мозга не организовал быстрый отвод с мышц тепла, отходов химреакций мышц.
Частота, сила тока электроимпульсов управляющих мышцой зависит от процентного объема крови в кровеносной системе мозга: чем больше, тем выносливее, сильнее, быстрее человек, больше его выносливость к ударам.
Мозг – натянутая давлением крови сеть кровеносных сосудов мозга, держащих как скелет гелеобразную массу мозга. Больше давление крови, диаметр кровеносных сосудов мозга – лучше защищён от ударов мозг. Высокое давление крови в кровеносных сосудах мозга защищает мозг от ударов, других нагрузок до тех пор, пока содержание сахара, кислорода в крови не ниже критического уровня, при котором человек теряет сознание от отсутствия топлива (сахар-горючее, кислород-окислитель) мозга.
Расход мозгом сахара, кислорода растет при повышении давления крови в конечных мелких, самых разветвленных кровеносных сосудах мозга или при усиленной работе мозга. Человек мгновенно поднимает давление крови мозга в момент ожидания удара в голову. В промежуток между ударами в голову он сужая сосуды уменьшает давление крови, снижая расход сахара, кислорода. И расширяет чисто транспортные крупные кровеносные сосуды мозга.
В момент удара в голову человек чтоб кратковременно поднять давление в крупных кровеносных сосудах, за 0,3-0,5сек сужает конечные мелкие, самых разветвленные кровеносные сосуды мозга, расширяет крупные кровеносные сосуды мозга. При расширении мелких сосудов в них быстро расходуются кислород, сахар. Мозг без топлива не работает: человек может терять сознание.
Но человек против равного держится десятки минут, применяя контрприем: вычислив в какую точку его черепа соперник просчитал удар, перемещает точку удара на 1,5-3см навстречу удару или от удара, уменьшая силу удара в 10-20раз. Легковес может защищаться от ударов тяжеловеса. Это касается не только удара рукой или ногой, но и ломом.
Спортсмен нанося удар вычисляет точку удара, блокируя в точке удара неподвижно все мышцы, превратив тело в каменную статую: передача линейной, вращательной инерции (импульс) тела в точку удара. Уход на 1,5-3см и в борьбе в 10-20 раз уменьшит силу борца-соперника проводящего прием с захватом.
Бросают на землю – ты накопив момент инерции броска, захватом, инерцией своего закрученного броском тела, включив каменную статую, докрутив еще полоборота окажешься сверху соперника в выгодной позиции, фиксируя ее ногами.
В режиме каменная статуя все мышцы взаимно неподвижны на 0,2сек. Эти 0,2сек требуют вычисления мозгом точки удара с точностью 0,6мм для максимума силы: причина того что каратист, ломая основанием ладони 2 кирпича, с повязкой глаз не сломает 1 кирпич.
Последовательности электроимпульсов мозга идут в 40-200 (используемых в соревнованиях. Всего мышц 600) мышц спортсмена. Эта последовательность импульсов у спортсменов не просчитывается уравнениям отрицательной обратной связи как у неспортсменов, а тренировками записана в таблицы решений положения тела. Они в 3-4 раза быстрее.
У спортсменов приемы разделены мозгом на элементарные движения группой мышц длительностью ~0,2 - 0,3сек. Элементарные движения мозг хранит как таблицы решений файлов движения. Файл движений – это анимационный файл, в котором для суставов рук, ног указаны программные параметры (допустимые диапазоны) кадрового вектора их мгновенного ускорения.
Для выполнения приема мозг находит файл движения соперника, подключает нервные волокна нужных мышц, дает сигнал. На «найти файл движения», «подключить нервные волокна нужных мышц» (нервные волокна позвоночника) у спортсменов обычно уходит 95-99% времени выполнения приема при сопротивлении равного соперника в единоборствах. На «выполнить» времени не остается. Приходится прерывать операцию – соперник изменил ситуацию – нужен другой «файл движения» – это может длиться бесконечно.
В единоборствах каждый удар, прием, связка 2-х приемов – отдельный софт, отдельный файл с 3D-кадрами движения соперника, отдельные таблицы решений положения тела соперника. Мозг ищет подходящий по начальным диапазонам цифр файл с таблицами решений положения тела соперника, включает его, подключает мышцы к соответствующим цифрам таблиц решений положения тела.
Таблицы решений положения тела соперника в файле движений привязаны к цифрам датчиков ступней и мышц, к цифрам вестибулярного аппарата. Каждому положению тела соперника соответствует 3D-кадр файла движений. В котором виртуальная фигура соперника изображена в этом положении, ракурсе.
3D-кадр-1 файла движений: таблица решений уравнений мышц, электроимпульсами в эти мышцы выполняет выбранный прием, связку, силовой перевод тела соперника в 3D-кадр-2 файла положения тела соперника.
Виртуальную фигуру соперника в 3D-кадр-1 файла движений мышцы стыкуют с реальной фигурой соперника по сценарию перехода к 3D-кадр-2 файла положения тела соперника. Мозг сканируя таблицы решений положения тела 3D-кадр-1 выводит адресные команды мышц для перехода в 3D-кадр-2.
Сигналы с таблиц решений мозга слабы. Поэтому их усиливают электроусилители (через каждые ~20см нервного волокна) сигналов в виде групп нейронов-усилителей сигнала, поднимающих напряжение сигнала до стандарта отрицательной обратной связи «мозг – мышца». Электроусилитель сигналов поднимет напряжение последовательности импульсов команды до указанного в 3D-кадр-1: диапазон 0,1-1V.
Усиленные импульсы в момент 3D-кадра-1 идут в адресные нервные волокна мышц через позвоночный кабель. 200 мышц тела – адреса 200 нервных волокон-проводов позвоночного кабеля. 30000 нервных волокон проходят внутри позвонков. Одни волокна силовые: включают мышцы. Другие датчиковые; третьи управляют впрыском катализаторов, другой химии в кровь, лимфу, в среду желудка; четвертые сужают (расширяют) кровеносные, лимфатические сосуды. 99% из 30000 нервных волокон позвоночного кабеля – провода с тактильных датчиков кожи человека. Все нейроны позвоночника – усилители сигналов от мозга, к мозгу.
Мозг по сигналам датчиков определит выполнение команды 3D-кадр-2, выполнит с файла движений переход к 3D-кадр-3. Переход между 3D-кадрами файла движений ~0,1сек определен средней тактовой частотой опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Hz: альфа-ритм мозга.
Выше частота импульсов мозга – сильнее мышца. Частота импульсов от десятков до 300Hz (у некоторых спортсменов 500Hz), амплитуда постоянна ~0,1V, не зависит от уровня возбуждения, зависит от электросопротивления данного нерва (в позвоночнике через каждые ~20см нейроны-усилители усиливают сигнал до 0,1V). Сигнал мозга 100м/сек: 2,6млн раз медленнее робота: 260000км/сек.
Мозг файл движений ищет дольше чем выполняет, из-за противодействия соперника. Из-за этого на ринге удары в движении 3-20 раз слабее. Нечувствительность вестибулярного аппарата к вращению мозг формирует за 2 недели тренировок или стабилизацией вертикали одним мгновенным взглядом глаз в одну точку на полу за 1 оборот.
Выносливость мозга – количество сахара и кислорода доставляемого в мозг сердцем за 1 сек. Больше средний диаметр кровеносных сосудов мозга – больше его выносливость
71) Работа компьютера разумного андроида основана в предсказании развития ситуации путем мысленного перенесения сознания андроида в сознание существ меняющих ситуацию. Андроид алгоритмами приоритетной иерархии последовательно вставляет себя на их место, просчитывая ситуацию по вероятности сценария.
В базе данных: абстрактные модели поведения распространенных живых существ + их генетические цели + алгоритмы идентификации визуально, по словам, по почерку действий + модели поведения, яркие цели.
Массовая работа одинаковых алгоритмов: одновременный поворот всех рыб стаи в 1 сторону от звука, волны давления.
Природа на управление 2 ногами человека потратила 400млн лет. Инженеры на ходьбу андроида 163 года: с 1834г – Чарльз Беббидж (1-й в мире перепрограммируемый компьютер) до андроида «Honda Asimo». Человек создал двуногую ходьбу 2,45млн раз быстрее природы. Нематериальное размножение софта с разумом в Интернете – форма жизни.
Система терморегулирования человека: сигнальные реле на границах органов человека. Холодное реле: фиксация повышения теплоемкости точки тела при понижении температуры ниже 36,7°С. Горячее реле: фиксация роста теплоемкости точки тела при повышении температуры > 36,7°С. 36,7°С – вода имеет минимальную удельную теплоемкость, энергетически выгодно. Действие обоих реле связано с изменением электропроводности водосодержащего раствора определенного вещества в нервном окончании при изменении удельной теплоемкости. Общая для обоих реле балансная электросхема с 2 растворимыми в водной среде сигнальными веществами. Реле расширяют, сужают кровеносные сосуды. Разные точки тела – разные таймеры.
72)
ИНЖЕНЕРНОЕ ОБРАЗОВАНИЕ: (статье 8 раз вредили) государство как силовая организация в лице класса силовиков принуждает студентов-инженеров к информационной педерастии – запоминанию мусорной «профессиональной» информации снижающей профессиональную конкурентоспособность студента, вызывающей эмоциональное выгорание профессионального вдохновения. Он больше не получит положительных эмоций от профессии.
Этого добиваются силовики христианских стран выполняя заповедь-2 Библии: нельзя никого и ничего любить кроме природы – нельзя любить профессию инженера. Яркую любовь с детства к профессии инженера христиане карают агентурным гостеррором христианской инквизиции (контрразведка) на 3 поколения по заповеди-2 Библии. Заповедь-2 дал инопланетному агенту Моисею инопланетянин Бог. Необходимы законы против инопланетных агентов.
Христианские страны борятся против главного смертного греха по Евангелию – гордыни. Гордыня инженера – служение профессиональной чести. Профессиональная честь разрешена военным, запрещена инженерам.
ЦЕЛЬ РАБОТЫ ИНЖЕНЕРА – ЯРОСТЬЮ ПРОФЕССИОНАЛЬНОЙ ГОРДЫНИ ПРОФЕССИОНАЛЬНО ПОРВАТЬ ВСЕХ КОЛЛЕГ В ВСЕМ МИРЕ. КАРЬЕРУ ИНЖЕНЕРА ИЗМЕРЯЮТ НЕ КОЛИЧЕСТВОМ ПОДЧИНЯЮЩИХСЯ ЕМУ ЛЮДЕЙ, ЭТО КАРЬЕРА МЕНЕДЖЕРА. А ПРОЦЕНТОМ КОЛЛЕГ В ВСЕМ МИРЕ ПРОФЕССИОНАЛЬНО ПОРВАННЫХ ИНЖЕНЕРОМ, КОЛИЧЕСТВОМ ФИРМ-КОНКУРЕНТОВ РАБОТОДАТЕЛЯ КОТОРЫХ ОБАНКРОТИЛ ИНЖЕНЕР (удалило государство).
Инженер – солдат технологической войны на мировом рынке. Инженер служит интересам страны и гражданского общества, а не классовым интересам силовиков, менеджеров. Профессиональный уровень инженера – это всемирный процент коллег, которых он профессионально порвал.
Только инженеры служащие технике, а не конкретным людям, направят эволюцию техники к совершенству, а не по ложному пути верующих в истинность общественного мнения. Общественное мнение служит эгоистическим классовым интересам, а не интересам гражданского общества.
Служение людям означает: эти люди заставят идти по антиобщественному пути, чтоб увеличить сбор налогов антиобщественным увеличением оплачиваемого труда в производстве и эксплуатации товара.
Пример: автомобильного конструктора заставят увеличивать число цилиндров в двигателе и число передач в коробке передач для увеличения оплачиваемого труда, уменьшать рабочий объем двигателя для уменьшения долговечности автомобиля до 5 лет. Оптимальная долговечность массового автомобиля 20-25 лет.
Честь инженера в том, чтоб доказать профессиональное превосходство над коллегами и служить долговременным интересам гражданского общества, а не интересам конкретных людей.
Понятие «профессиональная информация» в Спортивном списке профессий определяют учащиеся, работодатели, а не государство. Спортивный список профессий – профессии в которых у государства нет права ограничить созидательную для общества индивидуальную профконкуренцию. Правила игры в Спортивном списке профессий должны быть такими чтоб побеждала профессиональная генетика человека, не статус диплома
Граждане имеют право равных условий индивидуальной профконкуренции в Спортивном списке профессий. Означает:
1. право свободного доступа к любой информации, не являющейся тайной защищаемой официальными законами
2. право на пособие по безработице, достаточное для спокойного стопроцентного профессионального самообразования в публичных библиотеках, в интернете
Диплом информационного педераста объявляет инженерами людей непроверенных рынком – хорошо всасывают знания человечества, НО НЕСПОСОБНЫ НА ПРОТИВОПОЛОЖНЫЙ ПРОЦЕСС требующий другие генетические качества человека. Деньги надо вкладывать в тех, кто показал способность приносить пользу обществу, а не в тех кто показал чудеса информационного педерастирования.
Какие знания вкачают в инженера догадаться нетрудно – знания увеличивающие оплачиваемый труд (больше сбор налогов) + цензура на знания уничтожающие оплачиваемый труд. Диплом вуза принудительная информационно-педофильная услуга навязанная инженеру государством под угрозой запрета на профессию.
Право человеку работать инженером дает Великий Судья – мировой рынок, а не государство. Сертификацию должен проходить товар инженера, а не инженер. Чем больше требований к студенту, тем меньше вероятность что их все сможет пройти инженерный талант.
Профессии инженера 200000лет с момента изобретения средств уменьшения труда (каменный топор, лук…) при достижении цели. 200000лет никто не требовал с инженера принудительные знания, только способность решать технические проблемы. Знания инженер найдет в интернете, в книгах, обратится к платным консультантам.
Надо сделать дипломом инженера файл о разработках, идеях, изобретениях студента. Тренер обучающий инженеров имеет право выдавать письменную рекомендацию на инженера. Тренер по иску работодателя ответит за каждое слово своей рекомендации в Суде. На рынке труда конструктор с тренером уточняют к какому типу конструкторов он относится.
Типы конструкторов:
1. конструктор-изобретатель
2. конструктор-оптимизатор
3. конструктор-уменьшатель размеров
ПРОФЕССИОНАЛЬНЫЕ ПРАВА ИНЖЕНЕРА:
1. по каждому проекту инженер сам выбирает список тем в которых он выполнит 100% работы инженера у работодателя. Специализацию инженеров определяют они сами по принципу профессиональной иерархии в предприятии, а не государство (система образования)
2. человек имеет статус инженер-студент с момента начала учебы. Инженеры-студенты – не маленькие дети, у них есть права инженера. У инженера-студента есть право регулировать интенсивность учебы
3. у инженеров-студентов есть право выбора профессиональных знаний исходя с личных особенностей мозга и ситуации на мировом рынке. Конституция должна защищать право инженера-студента на свободное профессионального развитие
4. Конституция должна защищать право человека на стопроцентное профессиональное самообразование с проверкой работоспособности собеседованием с работодателем по принципу Суда. Обвинитель – работодатель доказывает: претендент не выполнит работу работодателя. Обвиняемый – претендент в рабочее место доказывает противоположное в собеседовании, в испытательном сроке
5. государство не имеет право решать что знать инженеру, как работать. Что знать, как работать – его личное дело согласованное с работодателем. Экзаменуются, тестируются, сертифицируются товары, услуги инженера, а не инженер и его знания
6. инженер не должен обществу, работодателю никаких профессиональных обязанностей, кроме обязанности профессионально порвать коллег-конкурентов на рынке. Не путать профессиональные обязанности с политическими, идеологическими
7. у каждого инженера-студента в вузе должна быть своя закрываемая надежным замком, мастерская-лаборатория с оборудованием для защиты от других студентов его инженерных секретов
8. инженер имеет право профэволюции в направлении, в котором он профессионально-генетически сильнее конкурентов
9. Конституция должна запретить государству вмешиваться в отношения «работодатель – инженер» при отсутствии требования вмешательства государства с их стороны
10. Конституция должна запретить государству монополизировать вопрос определения профессионального статуса (начинающий инженер – опытный инженер) инженера. Профессиональный статус инженера определяют мировой рынок, инженеры, работодатели, а не государство
11. Конституция должна защищать право инженера на защиту профессиональной чести
ПРОФЕССИОНАЛЬНАЯ ЧЕСТЬ ИНЖЕНЕРА – способность защищать интересы гражданского общества от классовых интересов силовиков, менеджеров, банкиров.
ЛИКВИДИРОВАТЬ ВУЗОВСКИЕ БИБЛИОТЕКИ ВЫСШЕЙ ФУНДАМЕНТАЛЬНОЙ НАУКИ
Государство принудительно вбивает в мозг инженеров-студентов «высшую фундаментальную науку», чтоб сделать инженеров максимально обязанным государству под угрозой исключения с вуза, запрета на профессию.
Классу инженеров нужно ликвидировать вузовские библиотеки «высшей фундаментальной науки» чтоб информационная педерастия не сжигала профессиональное вдохновение инженеров.
Сегодня госстандарты образования инженеров – это на 99% вымогание государством денег у инженеров на образование с целью надеть на инженера хомут максимальной «обязанности государству» за «высокий уровень системы образования», увеличить стоимость обучения для увеличения сбора налогов с вузов.
Государство продвигает в лучшие рабочие места инженеров не по человеческому фактору (наступательная сила таланта против коллег), а по «престижности вуза»: чем «престижнее» вуз, тем дороже образование, тем больше общий сбор налогов с вузов. Часть инженеров поддерживает этот лохотрон: «престижнее» их вуз – быстрее с работы инженера перебегут на работу менеджера (больше зарплата).
Меньше оплачиваемого труда – меньше экономических преступлений – меньше потребность в силовиках. Поэтому учат в госвузах как решать проблемы дороже, размножая узкой специализацией оплачиваемый труд.
Классу силовиков нужен максимум потребления ресурсов и запутанность экономики чтоб раздуть численность класса силовиков как аппарата учета, контроля, распределения, управления. Поэтому класс силовиков коллективизирует профконкуренцию, человеческую мысль, собственность, ответственность.
В 19 ВЕКЕ ИНЖЕНЕРЫ КОНТРОЛИРОВАЛИ МИРОВУЮ ПРОМЫШЛЕННОСТЬ. Стремление инженеров служить профессиональной чести – делать технику долговечной, надежной, равнопрочной противоречило стремлению класса силовиков чаще собирать налоги с промышленности, стремлению менеджеров чаще брать деньги с покупателей.
Системное планирование инженеров на 20-50 лет силовики, менеджеры, банкиры заменили финансовым планированием на 5 лет с превращением инженеров в рабов. Инженеры-конструкторы как рабы на галерах прикованы к свои стульям, не имея права без разрешения менеджера идти в цеха делающие их разработки.
Интересы класса инженеров на 99% совпадают с интересами гражданского общества.
Интересы класса менеджеров на ~50% противоположны интересам гражданского общества.
Менеджеров надо подчинить инженерам для предотвращения вредительства менеджеров против гражданского общества. Предприятия должны подчиняться инженерам, а не менеджерам.
Силовики, менеджеры блокируют индивидуальную конкуренцию (незаменимых нет) инженеров, размножают число работающих инженеров, шантажируя – вас инженеров больше чем надо – уволим за неподчинение приказу.
Класс работающих инженеров стремится уменьшить численность работающих инженеров: чем меньше на рынке рабочих мест инженеров, тем труднее классу силовиков и классу менеджеров принудить инженеров выбивать с гражданского общества максимум прибыли, налогов запланированным устареванием техники.
Класс инженеров стремится к индивидуальной профконкуренции универсальных инженеров. Для усиления класса инженеров и борьбы с узкой специализацией класс инженеров будет очищать свои ряды от инженеров, которые не могут профессионально порвать коллег. Вопросы инженерного образования должны решать инженеры, инженеры-предприниматели.
У христиан система в которой достижения делают одни, почести (воровство авторства) и деньги (воровство авторских денег) получают другие для поддержания принципа изначальной виновности человека. Христиане в СМИ слова «изобретения», «изобретатель» заменяют на «инновации», «инноватор», «специалист по инновациям».
Изобретатель – высшая форма инженера, решающего задачи на уровне мировой новизны. Высшая форма инженера – изобретатель создающий шедевры. Высшая форма карьеры инженера – изобретатель-предприниматель.
В послужном списке инженера ценны интеллект, талант, интеллектуально-волевые (защита от эгоизма менеджеров, силовиков) качества инженера. Профзнания инженера, диплом в послужной список инженера не входят, продаваться в рынке рабочих мест не могут – не товар.
Преимущество учебы в библиотеках, Интернете – взаимопонимание инженеров-самоучек: интуитивно выбирают информацию обеспечивающую максимальное уклонение от труда при достижении цели.
Инженер – интуитивная профессия. Свободный интуитивный выбор профинформации делает популярным ограниченный список удачных источников информации, как в рынке софта, аудиовидеопродукции. Выбирает интуиция, не государство за деньги налогоплательщиков.
Из-за отсутствия конкуренции с самообразованием вузы включают в курс максимум мусорной информации для максимума принудительной «обязанности» студента. Мусорная информация частного вуза ограничена рынком, госвузы не ограничены.
20-летний кредит на образование накручивает студенту «обязанность» государству. Студент половину активной жизни платит государству за мусорную информацию чтоб не читал не санкционированную государством профлитературу.
20-летний финансовый ошейник кредитного раба грабит семью студента лишними налогами. Это преступление остановят запрет госвузов (исключение вузы госслужащих) и в Конституции право человека на стопроцентное самообразование (список исключений определит Парламент).
Деньги налогоплательщиков должны идти в личные образовательные банковские счета граждан. Могут быть потрачены только на образование (проверка Прокуратуры). Попытку обойти стопроцентное финансирование личными счетами через выделение вузам части образовательного госбюджета карает Уголовный Кодекс – посягательство на рыночную конкуренцию учебных заведений.
Не оплачиваемый налогоплательщиками Черный список образования: экономисты, финансисты, менеджеры, юристы, дипломаты и другие профессии управления, распределения, учета, контроля.
Оплачиваемый налогоплательщиками Зеленый список госбюджетного образования: инженеры, программисты, алгоритмисты, некоторые типы госчиновников, медики, строители, повара…
Рабочее место от работодателя на основе собеседования, оценки личных идей, интеллекта инженера, на основе послужного списка как у военных. Послужной список: идеи в словесной, другой форме, проекты, изобретения, интеллектуально-волевые качества. Человек должен получать работу инженера на основе результатов конкурса разработок на получение рабочего места.
Инженер имеет право создавать товары, технологии только на основе своих личных изобретений, личных технологий. Инженер отвечает перед обществом только за параметр качество-цена своего товара, соответствие его закону.
Надо защитить Конституцией, международными договорами право человека на стопроцентное самообразование, право человека за 1 день получить документ о соответствии профессии.
Инженер – любой человек с рыночно-конкурентоспособной личной разработкой. Изобретатели влияют на ход мировой истории тысячи раз сильнее всех остальных профессий вместе взятых.
ВЫБОР ИНЖЕНЕРА: ПРАВА ИЛИ СТАБИЛЬНОСТЬ
Законы о рабочем месте инженера должны быть на выборе в контракте: право на рабочее место + малые профправа или полноценные профправа + теряешь рабочее место если слабее конкурента на рабочее место.
Профессионально слабый обязан уступить рабочее место профессионально сильному. Узкий специалист обязан уступить место универсалу. Универсальные талантливые инженеры найдутся если законы, профессиональные права защищают их от государства.
Если заслуженный инженер с большим стажем неконкурентоспособен, работодатель имеет право уволить, нанять другого. Прошлые заслуги, стаж не имеют значения: работа инженера – профессиональный спорт. Работа в Спортивном списке профессий – спорт, война против коллег. Право на выбор профессии Спортивного списка профессий есть при отсутствии конкуренции на рабочее место. Есть конкуренция – это право уничтожено более приоритетным правом человека на справедливое распределение рабочих мест по способностям. Права инженера кончаются там, где начинаются права другого инженера
ИНЖЕНЕРЫ:
1. инженеры-флешки – хорошо запоминают знания
2. инженеры-генераторы идей
Система дипломов информационных педерастов отбирает первых, не пропуская вторых барьером знаний, ограничений, принудительных обязанностей; убивая изобретателя в инженере. Принудительные знания – нарушение права человека на свободное развитие.
Принудительными знаниями класс силовиков нарушает право свободного поиска инженером профинформации: нельзя изучать лучшее – аэрокосмическую технику чтоб не было универсальных инженеров. Чтоб инженер не думал, не рассматривал государство как кибернетическую машину основанную на минимуме потребления ресурсов: рабочих мест чиновников, налогов, энергоносителей…
Право запрета на конкретное рабочее место для инженера есть только у официального Суда работающего по официальным законам в установленном официальными законами порядке, с полноценным участием обвиняемого в работе Суда (синее удалило государство).
Запретом стопроцентного профессионального самообразования сделали профессию инженера запретной детям бедных семей: могли не тратя денег заниматься профессиональным самообразованием в бесплатных публичных библиотеках, интернете.
1950-1980-е: инженерная литература дешевле художественной, больше технических деталей, цифр, меньше ненужной математики. Сейчас 3 раза дороже художественной, мало технических деталей, одна ненужная высшая математика, нет ключевой информации. Учебники вдохновляли с 1950-х до 1965г. После Кубинского ракетного конфликта класс силовиков сделал учебники инженеров негодными для самоучек.
Должна быть свободная конкуренция эргономичных (спасающих от труда) учебников, учебных сайтов, видеофильмов, компьютерных учебных программ в Интернете.
Силовики христианских стран по засекреченным признакам изучаемых в их закрытых вузах, выявляют талантливых людей из бедных семей, чтоб не допустить в профессию в которой сделают государство обязанным себе.
Надо усиливать в системе профобразования частные технические институты созданные лучшими инженерами по их взглядам на технику и систему обучения. Инженер-тренер в сайте созданного им института публикует список профессионально побежденных им коллег, фирм. Для инженера хороший коллега – профессионально побежденный им коллега, хорошая конкурирующая фирма – профессионально побежденная им фирма. После чего консультирует студентов, они выбирают себе техзадание для тренировок.
Признак отсутствия таланта инженера – отсутствие у студента профсамостоятельности, правильных вопросов. У каждого инженер-студента должна быть своя закрываемая надежным замком, мастерская-лаборатория с оборудованием для защиты от других студентов его инженерных секретов, личных инженерных файлов в его компьютере. Тренер защитит право студента на защиту от воровства (другими студентами) своих идей, технологий, моделей, компьютерных файлов, тетрадей с идеями.
Студент зарабатывает на сторонних контрактах, отдавая оговоренные контрактом проценты институту. Идеальная структура инженерного образования, системы распределения рабочих мест – организационная структура как в профессиональном боксе, в профессиональных шахматах. Институт предоставляет студенту самостоятельность, средства производства, рабочих, услуги консультантов.
Студент в Интернете и библиотеках ищет что ему нужно, формулирует вопросы к тренерам, консультантам. Сам создает цель, достигает ее по праву свободного развития. Интеллект: способность самостоятельно создать общественно значимую цель. Вместо экзаменов институт цензурно публикует в своем сайте достижения студентов для работодателей: видеоролики, патенты, курсовые работы.
Работодатель платит за наём на работу студента-создателя разработки. В контракте учет квалификации тренера, затрат на консультантов и рабочих, на средств потраченных на разработки студента, покрытие убытков работодателя от некомпетентности инженера.
Лучшая система инженерного образования – обучение инженеров на сложных проектах без ограничений времени на доводку проектов. Сложный многофункциональный проект сочинит для себя студент. Время на проект ограничит плата студентов за образование.
Инженер – промышленный самец, предприятие – промышленная самка, рожает товар по чертежам инженера. Лучшая система распределения промышленных самок – оленья система. У северных оленей самцы разборками на рогах выясняют: кто самый реальный самец – племенной самец. Племенной самец получает преимущественный доступ к лучшим самкам. Пока не обломает рога следующий племенной самец.
Люди гордыни не предадут за деньги интересы гражданского общества. Чем сильнее гордыня специалиста, мания профессионального величия, тем он преданнее интересам гражданского общества, которое платит ему профессиональной славой.
Ничто так не ограничивает власть денег, классовый эгоизм как мания профессионального величия в созидательных профессиях. Инженеры-маньяки величия, специалисты-маньяки величия пойдут на личные убытки и конфликты для защиты профессиональных прав, чести.
Профессиональная честь в экономике государства это достижение профессиональных целей в экономике государства с минимальной затратой человеко-часов, природных ресурсов, оплачиваемого труда, денег, времени гражданского общества. Соответствует военной безопасности государства: начинается с экономии человеко-часов в экономике по идеологии ТРИЗ – Теории решения изобретательских задач.
Ответственность – не профправа, а список соответствующих наказаний (штраф, премия, увольнение…) за профошибки.
Госвузы как филиалы силовых структур подавляют в человеке изобретательскую логику, заменяя выполнением заданий на скорость при отборе, учебе, экзаменах студентов.
Способ убить 5 лет – студенческие Формулы автомобилей, роботов – ограничивают число и качество функций, запрещают современные материалы, технологии. Снятие запретов, замена студенческих Формул Свободными Формулами даст студентам спонсоров-предприятий. Инженерный институт отбирает только таланты
Талантов признаки:
1. интуитивная самостоятельность. Чувствует что нужно, не нужно в данное время. Твердо защищается от попыток блокирования права выбора
2. положительные эмоции от профессиональных побед, от профессионального садизма против коллег сильнее эмоций от секса. Гений в профессиональном смысле маньяк-насильник против коллег
3. уверен в своем превосходстве против коллег
Спецслужбы христианских стран замедляют эволюцию человека:
1. уничтожением индивидуальной профконкуренции Создателей
2. трудом: потери жизненной энергии, ресурса тела человеком
3. навязывают лишние обязанности, чрезмерную математизацию, специализацию (бюрократизацию), регламентацию, стандартизацию
4. умышленным технологическим (не функциональным) усложнением всего
5. частыми изменениями правил игры
6. уводом в тупиковую ветку развития
7. универсальных интуитивистов заменяют узкими специалистами и математиками с созданием аналогичной антиэволюционой системы отбора в вузах
8. в вузовских учебниках технические схемы, информация об их характерных отказах заменяют не нужной инженерам высшей математикой
9. умышлено усложняют методы технических расчетов в вузах
10. обучение основанное на долговременной добровольной памяти, заменили на обучение основанное на временной принудительной памяти студента
11. запрет новых материалов, интеллектуальных функций, свободы конструирования в гоночной технике
12. бесконечная частая замена правил в гоночной технике для вытеснения талантливых универсальных изобретателей коллективами узких специалистов корпораций. Крупные корпорации враги эволюции
Инженер-студент имеет право на личный отбор 100% всей профинформации для своей профессии. Способный студент всегда определит: нужно, не нужно ему в данный период его жизни это знание (не может определить – генетически профнепригоден). Не государство, а рынок определяет право человека работать в этой профессии (не относится к госслужащим).
Секретными инструкциями силовиков инженеров обязали делать чертежи изготовленных материальных прототипов товара, что замедляет разработку. Чертежи нужны только силовикам для шпионских архивов. Предприниматели не обязаны оплачивать чертежи при разработке. Чертежи только после доводки товара для защиты от шпионажа
73)
ТЕОРИЯ ЭКОНОМИКИ ГОСУДАРСТВА: (статье 15 раз вредило государство) Цель экономики государства – достижение требуемых гражданским обществом количества и качества функций (включая функции госструктур) экономики за минимальные деньги. Незаконны функциональные требования к экономике, не приносящие пользы (по принципу весов «польза-вред») гражданскому обществу.
Капитализм начинается как экономика государства управляемая капиталистами (предпринимательский капитализм) как собственниками своих предприятий. Класс силовиков отстаивая классовые интересы коллективизирует, укрупняет предприятия (поглощение предприятий) в экономике для замены предпринимательского капитализма на менеджерский капитализм: предприятиями управляют не капиталисты, а наемные менеджеры.
Класс силовиков строит монополистический капитализм – экономическую диктатуру класса силовиков – сосредотачивая экономику в руках силовиков-банкиров, силовиков-менеджеров акционерных корпораций. Монополистический капитализм подавляет индивидуальное предпринимательство, равноправие на рынке, законами лоббирует интересы крупных корпораций
ПРИЧИНА ЭКОНОМИЧЕСКИХ КРИЗИСОВ
Самый темпераментный класс – силовики как класс размножаются быстрее гражданского общества, что дает изобретение новых прямых и скрытых налогов, экономические кризисы. Силовики ростом числа функций государства создают максимум паразитических рабочих мест управления, учета, контроля, распределения своим родственникам, секс-партнерам.
Пример паразитизма – принудительное страхование собственности граждан, предприятий предпринимателей. Христианские силовики изобретают новые способы выжать с кармана человека максимум денег за каждый 1км пути автомобиля. Они стонут когда валовый национальный продукт падает – не удалось в этом году обдурить гражданское общество как в прошлый год.
Они принудительно внедрили каталитические нейтрализаторы выхлопных газов автомобилей для роста налоговых сборов через рост производства автомобилей. Добыча 1 грамма платины, палладия для каталитического нейтрализатора требует перевозки транспортом и многоступенчатой переработки многих тонн руды. Ядовитые техпроцессы добычи платины, палладия, рост газового сопротивления выхлопных труб автомобилей увеличили расход энергии промышленностью, автомобилями. Экологическими организациями управляют христианские силовики для роста лишнего оплачиваемого труда.
Законами об автомобильном выхлопе (для роста сбора налогов) христиане увеличили лишний оплачиваемый труд в промышленности, примерно втрое увеличили потребление нефти, газа, электроэнергии государством. Большая часть энергоресурсов планеты идет на производство автомобилей, включая морские, железнодорожные, авиационные, автомобильные грузовые перевозки. Плюс ежедневно доставка миллиарда человек на работу, с работы для производства автомобилей, включая субподрядчиков.
Христианская экономика: силовики-банкиры захватывают экономику страны взбросами в СМИ просчитанной информации. Банкиры, силовики спланированными, искусственно созданными экономическими кризисами перераспределяют контроль над экономикой от предпринимателей к силовикам-банкирам.
Чем богаче предприятие, тем больше вариантов уклонения от налогов – меньше предприятие платит налогов на единицу продукции, на человеко-час. Коллективизация собственности классом силовиков уменьшает финансовую (дивиденды акционерам) свободу менеджеров, снижая их квалификацию.
Пока труд общества на выполнение списка функций государства уменьшается – граждане лояльны государству. Труд растет – перераспределение денег не улучшает ситуацию – первоисточник лишнего труда не деньги, а классовые интересы силовиков, менеджеров.
Капитализм – экономический индивидуализм – господство в экономике принципа минимальной коллективизации собственности на средства производства. Самая капиталистическая экономика – консорциумы состоящие с личных, семейных предприятий с личной или семейной собственностью на средства производства для тех, кто на них работает. Консорциум – объединение предприятий для временной цели типа выпуска военной, аэрокосмической техники.
При кризисах предприятия консорциума плавно переходят на внешние заказы без согласования армии менеджеров с зарплатой в 1000 раз больше рабочего.
Консорциумный капитализм уменьшает коллективы вместе работающих работников для снижения вероятности создания профсоюза. В консорциумах из-за возможностей выбора, лучшей организованности работникам легче защитить профправа, чем в крупных корпорациях, реализующих через менеджеров-агентов классовые интересы силовиков.
Небольшие предприятия не подталкивают людей к преступлениям как крупные акционерные корпорации, где ставка наворованного больше. Масштаб, вероятность преступлений прямо пропорциональны уровню коллективизации собственности, размеру предприятия.
В небольшой частной фирме обнаружить кражу, плохую работу легче. Воровать, плохо работать морально тяжело. В небольшой частной фирме любой определит чужих: нет расходов на охрану. Ничто так не организует людей на охрану средств производства как угроза их собственности.
Семейные фирмы, семья – самая патриотичная ячейка экономики государства. Сегодня ячейка – акционер. Он неспособен управлять предприятием, не примет его как пожизненную ценность. Акционирование – продажа страны иностранцам. Семья как ячейка экономики более патриотична, дальновидна в отношении к семейному предприятию.
Конкурентоспособность предприятия зависит от возможности выбора его работниками работы максимально соответствующей их способностям, возможностям, менталитету. Чем коллективизированнее собственность на средства производства, тем меньше интересы работников совпадают с интересами предприятия.
Народу внушают – у тебя право предпринимательства. Реализовать право не дают словами – время универсалов, время личных предприятий, время одиночек в науке, технике и экономике прошло – сейчас время узких специалистов, крупных корпораций, концентрации больших ресурсов в одном направлении. Подобной вечной ложью коллективист Сталин голодомором загонял единоличников в колхозы, госпредприятия.
Крупные корпорации заинтересованы в технологическом (не в функциональном) усложнении (законами, системой поставщиков, обязательствами между ними…) товаров, услуг чтоб задавить небольшие изобретательные фирмы ростом оплачиваемого труда.
Консорциумами движет противоположный импульс – технологическое упрощение товаров, услуг для роста прибыли организаторов консорциума через уменьшение числа участников кооперации в консорциуме: защита от кризиса сбыта.
В консорциуме с личных и семейных фирм товар собирают с деталей сделанных на своих личных станках в своих гаражах рабочими, признавших в контракте ответственность за качество, получая за личное клеймо больше денег.
Зависимость действий менеджеров акционерных компаний от настроений акционеров создает нестабильность стратегических целей. Нестабильны в стратегических целях госпредприятия – сегодня одни у власти, завтра другие. Наивысшая стабильность стратегических целей у личных и семейных фирм управляемых одним членом семьи. Менеджеры акционерных корпораций улучшают показатели фирмы на 3-5 лет, экономя на разработках, на профобразовании. Если работают с расчетом на 15-20 лет вперед годовые показатели нестабильны, растёт вероятность их увольнения.
Малое предприятие-А изготовив форсунку, продало ее малому предприятию-В. Предприятие-В установив форсунку на двигатель продало двигатель предприятию-С. Предприятие-С проведя тюнинг двигателя продало его предприятию-D. Предприятие-D поставило его в свой автомобиль, продало его дилеру. С каждой перепродажи от многократного взимания налогов себестоимость продукта растет.
Крупная корпорация выпускает автомобиль с меньшим числом ступеней перепродаж, снизив себестоимость платит меньше налогов. Крупная корпорация снижает себестоимость спецоборудованием, которое малые предприятия не потянут.
Себестоимость товара крупная корпорация снижает лоббированием в госструктурах. Крупные корпорации семьями сращиваются с властью, создавая рабочие места менеджеров детям правящих кланов силовиков.
Налог на добавленную стоимость крупная корпорация обходит занижением в документах себестоимости товара, продавая по завышенным от себестоимости ценам в странах меньшего налогообложения. Разница налогов – в дочерних предприятиях – провоцирует вывоз капитала за рубеж. Коллективизация собственности, укрупнение предприятий выводит капитал за рубеж, снижает сбор налогов. Малые предприятия не склонны к уклонению от налогов и вывозу капитала за рубеж, к паразитическим рабочим местам.
Рабочий-акционер предприятия не имеет права без разрешения менеджеров тюнинговать станок, красить в не раздражающий цвет. Даже если его акции дороже станка и менеджеры не акционеры. 90% права собственности в бизнесе – право распоряжения собственностью. Контрольный пакет акций не дает свободу управления предприятием: блокируют акционеры.
Надо число ступеней системы управления предприятием не > 4. Количество подчиненных у начальника до 100 человек: сил не хватит вмешиваться в профправа подчиненных, мешая работать..
Функция государства: госзаказ на тематические научные, изобретательские разработки с периодом окупаемости 5-100лет. Скелет государства – отечественный частный военно-промышленный, космический бизнес. Он не заинтересован в усилении иностранцев в экономике и политике государства: вероятность подкупа владельцев частного военно-промышленного и космического бизнеса 1000 раз меньше, чем у госслужащих
ГЛАВНЫЙ ЗАКОН ЭКОНОМИКИ: чем ярче эмоции профессионального вдохновения ключевых специалистов предприятия, тем быстрее предприятие поднимается вверх на мировом рынке. Яркость эмоций вдохновения упала – положение предприятия на мировом рынке тоже падает вниз.
ЗАКОН-2 ЭКОНОМИКИ: вмешательство контрразведки в экономику ведет к экономическому краху государства.
Контрразведка – страховое агентство, работающее про идеологии страхового агентства – борьба против усиления человеческого фактора:
1. запрещено увеличивать влияние человеческого фактора: незаменимых людей нет
2. все процессы организации должны быть стабильны по цифрам. Нестабильность карается
3. профессиональная конкуренция запрещена или сильно ограничена
4. бойкот универсальных специалистов
5. работа людей ориентирована на максимум личных связей
6. все работает как структура с максимумом (сбор информации) взаимных связей между элементами
7. структура требует одновременной работы большого числа узкоспециализированных элементов
8. узкая специализация людей. Их ответственность коллективизируют
9. запрещены взаимно независимая работа элементов структуры
10. запрещены универсальные элементы структуры
Для успеха предпринимательства необходим культ индивидуализма с его ярким стремлением человека к профессиональному превосходству над всеми коллегами, над всеми людьми. Для контроля над промышленностью контрразведка христианских стран агентурой незаметно внедряет в предприятия коллективизм. Предприятия становятся убыточными и движутся к банкротству из-за борьбы коллективистов против индивидуалистов, стремящихся к честной победе над всеми коллегами.
Коллективистам нужно социальное равенство как у рабов. Нельзя быть умнее других, лучше других. Рабочие и инженеры – рабы. Рабы равны! Контрразведка законами уничтожает профессиональную конкуренцию специалистов, конкуренцию предприятий (территориальный монополизм) на рынке.
В силовики отбирают марионеток точно выполняющих приказы без самостоятельного мышления, которое обычно карают. У инженеров таких ограничений нет, поэтому интеллектуально с инженерами в промышленности никто конкурировать не может.
Для захвата контроля над промышленностью контрразведка христианских стран блокирует положительный человеческий фактор, усиливает отрицательный человеческий фактор, чтоб карать инженеров за блокирование коллективизма. Вирус коллективизма убивает экономику.
Попытки контрразведки решить экономические, военные проблемы государства напоминают попытки решить проблему оптимизации Уголовного Кодекса юристами. Юристы наоборот максимально запутают Уголовный Кодекс чтоб политически усилить класс юристов, увеличить его финансирование гражданским обществом.
Только класс инженеров может оптимизировать Уголовный Кодекс, принципы, законы государства малым числом универсальных законов, принципов. Тогда 90% юристов, 80% силовиков станут не нужны
ЗАКОН-3 ЭКОНОМИКИ: личные связи разрушают экономику государства.
Стремясь к экономической диктатуре силовики законами, секретными инструкциями уничтожают в государстве человеческий фактор таланта, увеличивают роль личных связей, принуждают граждан тратить жизненную энергию больше на сеть личных связей как в тюрьме, чем на качество работы.
В экономике государства роль таланта должна быть доведена до максимума деколлективизацией профконкуренции, человеческой мысли, собственности, ответственности.
У человека право на выбор профессии по принципу конкурентоспособности человека: ты имеешь право на это рабочее место при условии твоего профессионального превосходства над конкурентами, претендующими на это рабочее место. Твое право кончается там, где начинается право другого человека
ЗАКОН-4 ЭКОНОМИКИ: больше госрегулирования – больше налогов платит налогоплательщик. Госрегулирование нужно для принуждения предпринимателей обеспечить долговечность, равнопрочность товаров + меры уменьшающие расход энергии, энергоносителей государством для военной, экологической, экономической безопасности гражданского общества. Но этого не будет делать класс силовиков из-за стремления к росту сбора налогов для паразитических рабочих мест силовиков и госслужащих своим родственникам, секс-партнерам.
Идеология Евангелия породила систему образования с сверхузкой специализацией и максимумом принудительных лишних знаний вместо созидательного участия студента в индивидуальной профконкуренции Мирового рынка.
У человека нет трудовой повинности. Зарплату платят за пользу работодателю, за удешевление бухгалтерии, а не за труд. В Судах труд оценивают деньгами при защите прав человека.
Рынок – бесплатная высококачественная двухсторонняя обратная связь «предприятие – пользователь». Государство обратную связь бесплатного бухгалтера – Рынок – заменяет хаосом госрегулирования и классовым эгоизмом силовиков, что кончается убийствами предпринимателей, рейдерскими захватами.
Чтоб офицерские группы в экономике не перестреляли друг друга, они территориально делят виды бизнеса между акционерными офицерскими группами, кланами. Офицеры спецслужб работают не по законам, а по решениям тайно принятыми офицерскими группами (обычно 4 человека).
Государство не может что-либо устойчиво создавать из-за стремления класса силовиков к коллективизации распределения денег, вместо концентрации денег в руках генераторов идей, носителей профессионального вдохновения.
Стремление к концентрации денег у генераторов идей, у носителей профессионального вдохновения отличает класс инженеров и изобретателей. Класс инженеров, если он не продукт отбора от класса силовиков, индивидуализирует ответственность, уменьшает роль человека в функциях государства, уменьшает число функций государства.
Класс силовиков тормозит эволюцию в стране для роста потребности в ней силовым путем. Инженеры не блокируют эволюцию в стране чтоб не было госпереворотов.
Если государством правят прирождённые инженеры – технологически упрощают государство как идеальную машину, потребляющая минимум ресурсов (минимум человеко-часов, энергоносителей, материалов, информации…), надёжно выполняющая максимум необходимых функций, построенная по принципу минимальной инфраструктуры и максимальных мобилизационных возможностей (война, кризис…) государства, имеющая идеологический антивирус типа ТРИЗ против лишних функций государства.
Инженеры как правящий класс будут строить государство по ТРИЗ – Теория решения изобретательских задач. Чем проще государство как машина, тем меньше госрасходы и налоги, тем больше денег граждан-покупателей усилят экономику
ЗАКОН-5 ЭКОНОМИКИ: крупнее структура – вероятнее бюрократизация. Защита от бюрократизации: максимально использовать универсальных специалистов по принципу: уровень универсальности специалиста задает он сам по соответствующим профессиональным правам для этого.
Чем крупнее организация тем меньше в менталитете персонала научной логики, больше догматизма. Тем менее склонны менеджеры к просчитанному профессиональному риску.
Наиболее бесконфликтно государство в котором максимален процент граждан с личной и семейной собственностью на средства производства. Вмешательство государства в систему распределения рабочих мест в рынке рабочих мест должно быть минимальным.
У силовиков главное в человеке ПРЕДАННОСТЬ, ВЕРНОСТЬ НАЧАЛЬНИКУ – готовность по приказу начальника предать коллег, друзей, семьи, родных. В предприятиях куда проникли силовики, индивидуальную профконкуренцию (единомышленников натравят друг на друга, завербовав скрытым агентурным гостеррором половину) карают как гордыню, загоняя в групповую профконкуренцию по принципу ПРЕДАННОСТИ, ВЕРНОСТИ менеджеру группы. Это экономика предателей – профессионалов заменяют предатели предающие интересы предприятия и гражданского общества.
Подавляя профконкуренцию христиане ликвидируют профессиональное вдохновение инженеров – яркие профэмоции запрещает заповедь-2 Библии. Заповедь-2 дал инопланетному агенту Моисею инопланетянин Бог. Необходим закон против инопланетных агентов.
Силовики карают стремление к профессиональному превосходству над всеми людьми, агентурой доводя профотношения таких коллег до максимального конфликта.
Когда работник предприятия делает рацпредложение, изобретение – секретные инструкции социального равенства принудительно коллективизируют авторство интеллектуальной собственности – в патент (рацпредложение) вписывают имена всех начальников, фамилия автора последняя в патенте или её нет.
Стоит предприятию достичь всемирного успеха в наукоемкой технологии, силовики внедрят в него агентов коллективизирующих профконкуренцию, человеческую мысль, собственность, ответственность. Это разрушает процесс разработки, поддержки сложной технической или идеологической системы.
Основа Гражданского договора о государстве – долговременные интересы гражданского общества выше интересов любого отдельного класса
Инженеры заменяют коллективную профконкуренцию индивидуальной. Управление государством сводится к управлению небольшим числом суперменов.
Переход госвласти к классу инженеров начнётся с Министерства обороны. Роботизация войны заменит силовиков роботами с искусственным интеллектом: власть в Минобороны уйдет к классу инженеров, к компьютерной сети искусственных интеллектов. Затем класс силовиков отдаст власть классу инженеров в МВД.
Инженеры самое коррупционное звено – человека – заменят техникой, алгоритмами по принципу минимальной инфраструктуры, максимальных мобилизационных резервов. Человека заменят системы не совершающие преступления даже если решения принимают люди (преступные решения можно не выполнять).
Для инженера лояльность фирмы к интересам гражданского общества выше финансовых показателей, в отличие от менеджеров, силовиков. Поэтому управлять предприятиями должны инженеры, подчиняться им должны менеджеры.
Надо отменить патентные пошлины для граждан-изобретателей патентующих свои личные изобретения. Законом определить алгоритм вычисления максимально возможной цены за лицензию на изобретение для отечественных предприятий. Надо официально признать древнейшую чисто человеческую профессию изобретатель, внести в госреестр профессий, признать граждан-изобретателей предпринимателями: налог на прибыль, а не пошлины как для иностранцев
ЗАКОН-6 ЭКОНОМИКИ: запрет государству скупать акции частных предприятий.
Предприятия идут к банкротству после скупки государством части акций предприятия с постепенным внедрением офицеров спецслужб в рабочие места менеджеров. Силовики внедряют в предприятие коллективизм с его стремлением к равенству людей и принципом «незаменимых нет». Для успеха предпринимательства крайне необходим культ индивидуализма с его ярким стремлением человека к профессиональному превосходству над всеми коллегами, над всеми людьми.
Коррупция растет от проникновения силовиков в частные предприятия. В частных корпорациях государство скупая акции, ставит менеджерами контрразведчиков, всё превращающих в подобие страховой компании с сетью профессиональных личных связей.
Коллективизация ответственности силовиками уничтожает ответственность. Ответственность – мера наказания за соответствующие ошибки, а не права. Когда предприятием управляет полковник спецслужб ответственность коллективизируется. В дела предприятия вмешиваются генералы. Конфликт решают деньгами.
Коррупция между силовиками (своих не трогают) проблема – Конституция и закон должны запретить государству скупать акции частных предприятий.
Для защиты от хаоса госрегулирования и коррупции надо в всем мире запретить госпредприятия. Список исключений: центробанк, экспорт оружия за рубежом, вузы для госслужащих.
Силовики не имеют права заниматься предпринимательством в рабочее время. Только в нерабочее время в частном порядке с управляющим, без злоупотребления госвластью.
Если процесс управления предприятием коллективизирует один офицер госслужб, продолжат вышестоящие. Решения принимают вышестоящие, ответственность нижестоящих. Вышестоящие могут представлять интересы конкурирующего предприятия.
В такой экономике контракты не по принципу рыночной конкуренции талантов, предприятий, а по конкуренции звездочек в погонах. Хаос госрегулирования в экономике создают личные связи уволенных силовиков.
Класс силовиков заменяет специалистов предприятия офицерами спецслужб управляющими по идеологии контрразведки. Судьбу предприятий решают не офицеры управляющие ими, а вышестоящие.
Предприятие в другом регионе – офицер-менеджер, офицер-предприниматель подчиняется высшим офицерам другого региона. Они скрыто вредят друг другу от различия клановых (правящие кланы местных силовиков) экономических интересов. Когда Силовик вместо карательной деятельности в рабочее время занимается бизнесом, государство разрушается.
По учебнику идеологических террористов Евангелие класс силовиков идеологическим террором против гражданского общества создает неприязнь, ненависть к государству других классов общества с целью убить в них энтузиазм в служении государству чтоб государство не стало им обязанным. Стремление силовиков к классовой монополии на экономику – причина экономических кризисов.
Нужны точные, однозначные определения по признакам юридической границы между политикой и экономикой для отделения политики от экономики. Политика может смешиваться (дотации, госзаказы, таможенные сборы, законы…) с экономикой только при защите от иностранцев
ЗАКОН-7 ЭКОНОМИКИ: Антимонопольная служба должна быть заменена Службой равноправной конкуренции на рынке. Государство защищает равноправную конкуренцию на рынке. Антимонопольная функция государства – преступление против предпринимательства.
Равноправная конкуренция и монополия – юридически разные понятия. Конкуренцию защищают господдержкой немонополистов, а не расчленением предприятия-монополиста, штрафами. У предпринимателей есть право на монополию на рынке при равноправности (список юридических признаков) конкуренции обеспечиваемой государством (его обязанность, а не предпринимателя)
ЗАКОН-8 ЭКОНОМИКИ: конкуренцию инженеров убивают узкая специализация инженеров и ограничения их профессиональных прав.
Менеджеры, силовики против инженерного риска – им могут управлять только инженеры. Инженерный риск усиливает класс инженеров, ослабляет контроль силовиков, менеджеров над промышленностью. Силовики, менеджеры уничтожают инженерный риск, сводя всё к копированию чужих технологий.
В 19 веке инженеры контролировали мировую промышленность. Стремление инженеров служить профессиональной чести (моральная поддержка гражданским обществом) – делать технику долговечной, надежной, равнопрочной противоречило стремлению класса силовиков чаще собирать налоги с промышленности, стремлению менеджеров каждые 3-5 лет брать деньги с покупателей.
Системное планирование предприятия инженерами на 20-50 лет заменили финансовым планированием на 5 лет силовики, менеджеры. Предприятия должны подчиняться ведущим инженерам, а не менеджерам. Менеджеры часто служат не интересам предприятия, а интересам личных связей – это их личный капитал
Менеджеры уничтожая профессиональную честь инженеров сделали их рабами. Инженеры-конструкторы как рабы на галерах прикованы к свои стульям, не имея права без разрешения менеджера пойти в заводские цеха где изготавливают их разработки.
Классовые интересы менеджеров противоположны интересам предпринимателей. Уровень жизни по автомобилю упал втрое в промышленно-развитых странах с 1970-х. Крупные автопроизводители увеличивают точность изготовления за счет уменьшения размеров деталей с целью выжать максимум денег на запчасти, техобслуживание. Нужны стандарты долговечности равнопрочности товаров.
ЗАКОН-9 ЭКОНОМИКИ: чем больше процент менеджеров в предприятии – тем больше хаоса. Контролироваться менеджером должен конечный результат техпроцесса, а не техпроцесс или работник
ЗАКОН-10 ЭКОНОМИКИ: максимальное использование человеческих ресурсов. Чтоб государство не проиграло конкуренцию в мировом рынке, нужна жесткая конкуренция специалистов, что требует максимально использовать человеческие ресурсы государства через:
1. на госзаказы могут рассчитывать любые граждане через свободные госконкурсы на получение госзаказа
2. госзаказы должны получать генераторы идей, лидеры, а не предприятия. Ответственность за выполнение госзаказа должна быть личной, не коллективной
3. конкуренция по принципу – узкие специалисты уступают место сильным универсальным специалистам
4. конкуренция специалистов по принципу – профессионально слабый уступает рабочее место профессионально сильному
5. бесплатное профобразование
ЗАКОН-11 ЭКОНОМИКИ: у человека есть право на стопроцентное профессиональное самообразование с проверкой работоспособности через собеседование с работодателем по принципу Суда с равноправием, состязательностью сторон. Обвинитель – работодатель доказывает: претендент не выполнит задачи работодателя. Обвиняемый – претендент в рабочее место доказывает противоположное в собеседовании, в испытательном сроке.
Для небольшой части профессий (например хирург) требуется экзамен для проверки профессионального самообразования человека, но экзамен не должен по инициативе проверяющей организации длиться > 4 часов. По инициативе экзаменуемого экзамен может быть продлен.
Инженеры в экзаменах для проверки профессионального самообразования не нуждаются – проверяется, сертифицируются не инженер, а созданные им товары
ЗАКОН-12 ЭКОНОМИКИ: налоги на граждан не должны быть прогрессивными. Социальное равенство граждан – способ конфискации налогами денег богатых предпринимателей чтоб лишними функциями государства силовики создавали паразитические рабочие места силовиков, госслужащих своим родственникам, секс-партнерам
ЗАКОН-13 ЭКОНОМИКИ: больше налоги – больше денег уйдет на лишние бюрократические процедуры (сертификаций, лицензирований…) блокирующие предпринимательство. Сертификацию, лицензирование должен ограничивать Принцип оптимизации государства
ЗАКОН-14 ЭКОНОМИКИ: для получения максимума процентной прибыли оптимум численности персонала предприятия ~400 человек
ЗАКОН-15 ЭКОНОМИКИ: если экономить труд работа занимает много времени, требуя мало денег. Если работу ускорить вдвое, денег в конечный результат уйдет 4 раза больше
ЗАКОН-16 ЭКОНОМИКИ: без роботизации экономика мигрирует в страны с дешевыми человеко-часами
ЗАКОН-17 ЭКОНОМИКИ: уровень жизни граждан обратно пропорционален уровню паразитации экономики
ЗАКОН-18 ЭКОНОМИКИ: чем севернее страна, тем выше уровень жизни и экономики если нет влияния на экономику госидеологии. Надо до разумного минимума снижать число требований к гражданам для уменьшения до минимума госбюджета через уменьшение числа функций государства
ЗАКОН-19 ЭКОНОМИКИ: вероятность экономических преступлений и монополизации рынка прямо пропорциональна числу совладельцев предприятия, числу работников.
Закон защиты консорциумов от корпораций: число акций предприятий неограничено. Если владельцев средств производства > 20 – налог на коллективизацию растет (по графику от закона) пропорционально числу владельцев свыше 20
ЗАКОН-20 ЭКОНОМИКИ: чем больше уровень вмешательства государства в семьи
(национализация детей – дети якобы принадлежат не семье, а обществу в лице класса силовиков – силовики имеют право разрушать семьи)
граждан, чем больше ответственность мужчин, женщин за семью и детей по законам, тем меньше рождаемость и процент работоспособных граждан. Чрезмерное госрегулирование удушает психику человека, превращая его в загнанное животное не желающее продолжать род
ЗАКОН-21 ЭКОНОМИКИ: экономику государства должны планировать функции обслуживания гражданского общества, а не деньги. Функции первичны, деньги вторичны. Нужны не цифры ВВП (максимум лишнего оплачиваемого труда для выжимания максимума налогов с общества) экономики, а функциональное превосходство (уровень, качество жизни) экономики страны над экономикой других стран по оценкам экспертов.
Экономику оценивают граждане процентными оценками в сайтах госвласти. Экономические показатели государства – список процентных оценок выполнения общественно-полезных, государственно-полезных функций, а не валовый национальный продукт. Класс силовиков общественные функции рынка заменяет математикой валового национального продукта.
Пример ориентации государства на интересы гражданского общества – автомобиль «Фольксваген жук» 1930-х сконструированный по принципу минимальных расходов гражданского общества на изготовление, эксплуатацию. Современные товары конструируют менеджеры по противоположному принципу.
С начала 1970-х производительность в промышленности выросла втрое к 2004г, себестоимость средств производства упала втрое: цена автомобиля должна была снизиться вдвое к зарплате рабочего как в бытовой технике – большие холодильники подешевели вдвое к зарплате среднего рабочего. Но автомобили подорожали втрое к зарплате среднего рабочего, став теснее на 25%, хотя новые функции автомобилей это максимум 3-4% от общей себестоимости.
Надо увеличивать долговечность, равнопрочность автомобилей, других товаров для усилении военной безопасности государства через технологии снижающие его зависимость от всех видов ресурсов. Установить список поддерживаемых государством товаров, услуг для граждан.
Для захвата экономик конкурирующих государств поставлять им сверхдолговечные, равнопрочные товары не требующие техобслуживания, расходных материалов. При противодействии обвинять их в мировых СМИ в разрушении экологии планеты лишним производством. Государства тратят много ресурсов чтоб возить паразитов экономики на работу и с работы, обеспечить на работе освещением, отоплением, кондиционированием.
Освобождение граждан от лишнего оплачиваемого труда приведет к индивидуализации (тюнинг товаров) потребления, к возврату части потерянных рабочих мест в область тюнинга товаров, к росту спроса на дорогие товары длительного пользования, к росту спроса на роботизацию домашнего быта, личных средств производства; вызовет отток капитала с банков в промышленность и тюнинг. Стремление пользователя к индивидуализации потребления создаёт в экономике новые высококвалифицированные рабочие места с прямой (без посредников) обратной связью с непосредственным пользователем товара, услуги.
Банки в чистом виде запретить, кроме Центрального госбанка. Только производственные предприятия, сфера нефинансовых услуг имеют право создавать банки с уставным капиталом не больше годовой прибыли (уточнение каждый год) производства товаров, услуг
ЗАКОН-22 ЭКОНОМИКИ: чем больше функций государства, тем оно нетерпимее к гражданам и предпринимателям, снижая их интерес к работе. Государство обязано отказаться от любых функций противоречащим долговременным интересам гражданского общества.
Каждая новая функция государства – человеко-часы чиновников оплачиваемые налогоплательщиками. Нужен закон на полгода снижающий зарплату законодателя-автора за каждый его новый принятый закон без ликвидации (за счет универсализации формулировок законов и др.) по его инициативе старого закона + механизм ограничения гражданским обществом лишних госфункций негосударственными организациями.
Надо заменять множество законов малым числом универсальных (обобщенных по признакам) унифицированных законов на основе нехристианского Римского права, сведя к небольшому числу универсальных принципов через оптимум самостоятельности и ответственности судей.
Слишком мала ответственность Судей – чрезмерны наказания, наказывают невиновных. Слишком велика ответственность – бездействие Судов. Ответственность не профессиональные права, а список неотвратимых наказаний человека за соответствующие ошибки. При нападениях на судей приговор тайным голосованием трех Судей
Универсализация законов по принципам:
1. объект продаваемый в частную собственность, становится частной собственностью с момента приобретения, если в договоре не указано иное
2. нет преступления без жертвы преступления. Без доказанного ущерба незаконны санкции, штрафы… Человек не может быть осужден Судом без жертвы преступления
3. принцип соразмерности наказания преступлению. Компенсация и ответственность преступника привязаны к размеру ущерба. Наказание соразмерно ущербу. Не создавать отдельные статьи для разных видов кражи госбюджетных или частных денег, а устанавливать штрафы, сроки тюремного заключения по сумме ущерба
4. законы создают инженеры, не юристы. Силовики, юристы заинтересованы в усложнении и запутывании законов, в максимуме управляемой конфликтности в обществе. Потери от этого несут малые, средние предприниматели, которым нужно соблюсти 50000 законов только одного государства, а продавать товар в многих странах. Силовики добиваются роста числа граждан отправляемых в тюрьмы и дурдомы. Кормильцы силовиков – преступники. Не будет преступников – не будет финансирования. Не доверять юристам, силовикам законодательство, наукоемкий бизнес, управление государством – им классово невыгодны двухсторонние обратные связи в государстве. Как создавать двухсторонние обратные связи лучше инженеров не знает никто. Государством как системой с двухсторонними обратными связями должен управлять самый системный класс общества – инженеры – как самый лояльный к интересам гражданского общества класс общества. Класс силовиков класс управляемого хаоса
5. принцип равноправия сторон ограничивает права человека (организации) правами другого человека (другой организации) без лишних законов
6. законы строят на понятиях «статус кво», «презумпция невиновности», «неоспоримое доказательство»
7. большая часть законопроектов обсуждается в Интернете
8. обвинитель, обвиняемый согласны – вопрос решит жребий
Конституция – сокращенная версия Гражданского договора о государстве. В ней надо:
1. право человека на стопроцентное профессиональное самообразование с проверкой работоспособности через собеседование с работодателем по принципу Суда с равноправием, состязательностью сторон. Обвинитель – работодатель доказывает: претендент не выполнит задачи работодателя. Обвиняемый – претендент в рабочее место доказывает противоположное в собеседовании, в испытательном сроке
2. право человека на свободный бесплатный доступ к источникам информации стопроцентного профессионального самообразования
3. граждане имеют право доступа к информации, не являющейся тайной защищаемой официальными законами
4. законы не могут карать при отсутствии жертвы преступления
5. защита инженеров, их работодателей от государства. При приеме инженера на работу государству запрещено вмешиваться в отношения «работодатель – инженер» при отсутствии требования вмешательства государства с их стороны
6. запрет государству монополизировать вопрос определения профессионального статуса (начинающий инженер – опытный инженер) инженера. Профессиональный статус инженера определят мировой рынок, инженеры, работодатели
7. право человека на защиту профессиональной чести
8. запрет госпредприятий (кроме центробанка и продажи оружия за рубеж), госвузов кроме госвузов госслужащих
9. запрет государству скупать акции частных предприятий иначе, чем по решению Суда в установленном официальным законом порядке
10. запрет налогов, страховых взносов, прочих форм принудительного изъятия средств государством за владение частной собственностью
11. запрет госидеологии
12. запрет государству лишних функций для уменьшения налогов, вмешательства в жизнь граждан и их семей
13. государство отвечает перед гражданским обществом за действия Центрального банка
14. Конституция – документ защищающий граждан, их семьи, предпринимателей от грабежа и идеологического бандитизма государства как главной угрозы в жизни
Слова в Конституции должны употребляться только в наиболее распространенном смысле, не быть многозначными по смыслу. Слова в науке могут иметь только однозначный смысл. В юридической науке неприменимы многозначные слова непригодные для свободного использования научной логики. Юридически недопустимы в законах многозначные понятия «экстремистский», «экстремист». Государство в Судах против граждан обязано соблюдать принципы юридической науки.
Основа управления государством – Гражданский договор о государстве. Управление государством по Главному принципу демократии: не допускать чтоб для гражданина всё стало политикой – угрозой государства.
Силовики – персонал нанятый Гражданским обществом выполнять Гражданский договор о государстве, запрещающий силовикам иметь надобщественные интересы – нет ничего выше долговременных интересов Гражданского общества.
Защита прав человека на собственность, предпринимательство означает профессиональную, финансовую независимость граждан от государства: если общество массово разбогатеет, пойдет вниз статистика преступлений против собственности. Это невыгодно силовикам, поэтому государством управлять должны инженеры. Если уничтожить лишний оплачиваемый труд, исчезнет большая часть экономических преступлений. Нет преступлений – не нужны силовики.
Создать совершенную правовую систему государства без классового эгоизма может только инженер в силу его идеальной философии ТРИЗ: идеальная система та которой нет, но её функции выполняются в нужном количестве, качестве. Класс профессионально работающих инженеров – единственный класс не заинтересованный в своем размножении.
Ученым не доверять управление государством – склонны к чрезмерной технологической структуризации систем как и силовики. Класс инженеров совершенствует мир, класс ученых только познает не меняя. Если правит Евангелие – класс инженеров уничтожает идеологию Евангелия, класс ученых ищет системную красоту мироздания по Евангелию.
Государством правят инженеры – законы обобщают, унифицируют, упрощают, уменьшают их число. Инженеры организуют работу по принципу индивидуальной профессиональной конкуренции универсальных специалистов.
Отбор людей у инженеров по принципу индивидуального профессионального превосходства над коллегами. Идеальное средство достижения цели – средство не требующее обучения или труда для использования. Идеальный работник не требует вмешательства сверху в его работу, все делает сам.
Государством как машиной с множеством обратных связей мы инженеры будем управлять по принципу Идеального конечного результата ТРИЗ. Экономика – общественная машина, оцениваемая гражданами по качеству выполнения заложенного в нее Гражданским договором о государстве списка конечных общественных целей экономики.
Государство может вводить экостандарты, но не создавать. Создавать должны неоплачиваемые негосударственные общественные организации защищенные от государства, частного бизнеса. Нельзя чтоб экостандарты создавали ученые (зарплату им платят силовики) получающие за это деньги от обвиняемых – силовиков, менеджеров корпораций.
Христианские экономисты увеличивая количество лишнего оплачиваемого труда в экономике для роста налогов, оставят внукам обглоданную планету свалок по словам Иисуса Христа: не заботься о завтрашнем дне.
Когда модифицировал эту статью без интернета, печать текста по радиоканалу годами блокировал задержкой в 4сек на любое действие майор. Очистка перезагрузка компьютера, дефрагментация дисков, перезапись операционки, перенос текста на новый файл не влияли на 4сек. В других текстовых файлах такого не было. Видимо статья ключевой документ сайта для силовиков. До этого было дистанционное удаление в реальном времени на моих глазах с личного компьютера (не подключен к интернету) десятков статей которые 3 месяца готовил к публикации.
Форум: dzen.ru/a/ZLmQJiF3OUJF6fia
74) ИЗОБРЕТАТЕЛЬ: (статье 8 раз вредило государство) изобретателей с 2003г законы Госдумы загоняют в рабство в корпорации. Мы изобретатели требуем отменить пошлины за наши собственные изобретения.
Законы принуждают изобретателя платить государству налоги за незаработанные изобретателем деньги – ежегодные пошлины на каждый патент на изобретение. Заработает деньги изобретатель – государство ещё раз берет с него налог – двойное налогообложение. Не пошлина защищает изобретателя, а его деньги за судебный иск, адвокатов. Или проиграв Суд оплатить работу адвокатов корпорации.
Государство заинтересовано в поражении изобретателя в противостоянии изобретатель – корпорация. Государство пошлиной на изобретения защищает богатые корпорации от бедных изобретателей чтоб у изобретателей не было денег на свою изобретательскую фирму.
Навязало государство изобретателям пошлину – должно оплатить изобретателям потерю лицензионных денег от ограничения срока действия патента в 4-5 раз в сравнении с правом интеллектуальной собственности кинорежиссеров, композиторов, писателей, художников.
Изобретатель за тысячи изобретений не может платить тысячи пошлин: корпорации не хотят платить за изобретения одному человеку. Лучшие изобретатели могут за всю жизнь сделать 5000-10000 изобретений. За пошлины должны отдать 2500-5000 годовых зарплат среднего рабочего + столько же отдать каждой зарубежной стране, их много. Ежегодные пошлины на изобретения убивают профессию изобретателя, технический прогресс, технологическую безопасность государства.
Чтоб раскрутить своё имя как бренд изобретателю надо создать ~2000 патентов на достаточно полезные изобретения. Тогда изобретателя будут воспринимать как бренд с долговременной силой в мировом рынке
Государство должно признать за изобретателем статус предпринимателя:
1. он платит государству только с прибыли
2. гражданин-изобретатель не обязан платить ежегодную пошлину государству: писатели, кинорежиссеры, художники, скульпторы, архитекторы, остальные субъекты права интеллектуальной собственности не платят ежегодную пошлину. Изобретателей государство пошлиной приравняло к иностранцам. Изобретатель не иностранец, его изобретения не иностранный товар
3. государство должно за деньги изобретателя открыто в интернете официально регистрировать после отрицательной оценки, заявки на патенты чтоб изобретатель мог доказать приоритет
Государство должно признать:
1. у государства нет права облагать патентного поверенного налогом на вмененный доход
2. не должно быть помех от государства на обучение или получения статуса патентного поверенного
3. в сайте патентного ведомства должен быть доступ к 100% всех законов и информации необходимых изобретателям, патентным поверенным.
4. уголовную ответственность патентного поверенного за передачу третьим лицам незапатентованной информации
За изобретение бесспорно опубликованное первым без патентования, при оплате пошлины на расследование приоритета публикации, государство должно выдать патент на изобретение с приоритетом на момент первой публикации изобретения.
Изобретатель платит государству лицензионные выплаты (пошлины) за собственное изобретение независимо от наличия дохода. Так государство заставляет инженера, изобретателя отказаться от изобретательства или бесплатно отдать патент корпорации. По закону государство может национализировать любое изобретение изобретателя или продать его на торгах за неоплату пошлины.
Класс силовиков законами борется против перехода промышленности под интеллектуальный контроль класса инженеров (изобретатель – высшая форма инженера). Законы принуждают изобретателя платить патентному поверенному $1500 (было $100). Чертежи заявок делаем мы изобретатели; на 99% описания, ключевые слова мы.
ПО ЗАКОНАМ РОССИИ ИЗОБРЕТАТЕЛЬ ДОЛЖЕН ОТДАТЬ ЗА КАЖДОЕ СВОЕ ИЗОБРЕТЕНИЕ ПОЛУГОДОВУЮ ЗАРПЛАТУ СРЕДНЕГО РАБОЧЕГО РОССИИ В ВИДЕ ЕЖЕГОДНЫХ ПАТЕНТНЫХ ПОШЛИН.
Класс силовиков сделал это с целью загнать изобретателей рабами в госпредприятия, корпорации. В госреестре профессий, в корпорациях нет профессии изобретатель: С КАКОЙ ЦЕЛЬЮ христиане законами УБИЛИ ПРОФЕССИЮ ИЗОБРЕТАТЕЛЯ.
В христианских странах Евангелие создало карательных секретных инструкций против изобретателей больше, чем против уголовников-рецидивистов. Слово «ИЗОБРЕТАТЕЛЬ» секретными инструкциями запретили (только «ИННОВАТОР») средствам массовой информации. С 2003г приняли законы делающие профессию изобретателя убыточной чтоб не дать изобретателям создать свою изобретательскую фирму типа «General Electric» Томаса Эдисона.
В России контрразведкой запрещена профессия изобретателя: запрещено гражданам-Создателям (инженеры, изобретатели, рабочие, предприниматели…) делать государство обязанным себе за изобретения: можно только копировать зарубежное. Государство за изобретения должно быть обязано только силовикам (разведчикам), ворующих изобретения в зарубежных странах.
Деньги которые Россия из-за борьбы против российских изобретателей чрезмерно тратит на промышленный шпионаж, десятки тысяч раз больше денег необходимых изобретателям на внедрение их изобретений (заменяющих всё зарубежное) в России.
На идеологическую борьбу против граждан-изобретателей контрразведка и разведки христианских стран тратят больше денег налогоплательщиков, чем на остальные их функции вместе взятые.
СССР создал десятки закрытых городов-тюрем вместо прекращения нарушения прав изобретателей, предпринимателей, патентных поверенных! Не может в городе-тюрьме человек работать на высоком уровне вдохновения человека, чье право частной собственности и право предпринимательства защищено законом! Надо не выбрасывать миллиарды налогоплательщиков на госорганизации и недвижимость, а отменить патентные пошлины и законы против патентных поверенных.
Полугодовую зарплату рабочих, которую сдирают с изобретателей за каждый патент – эти деньги тысячи раз меньше многомиллиардных убытков «Сколково» – финансовой пирамиды за деньги налогоплательщиков. Государство отдало Массачусетскому технологическому институту $302млн за обещанные лекции профессоров в Сколково, вместо отмены пошлин на личные изобретения.
Сколково не аналог Силиконовой долины: изобретатели США защищены от государства правом частной собственности изобретателей на землю на которой стоит их предприятие, на само предприятие. Сколково отнимает у изобретателей право собственности на изобретения, контроль над промышленностью.
Наукоемкие технологии получают отменой патентных пошлин на изобретателей, отменой законов против изобретателей и патентных поверенных. Надо отделить государство от системы инженерного образования, от системы распределения рабочих мест инженеров. Этим бесплатно займутся рынок, работодатели, инженеры.
Разработки за деньги налогоплательщиков надо строить на финансировании генераторов идей с профессиональным вдохновением в данной теме.
Госидеология Евангелие 10-15 лет не дает талантливому человеку создавать свой проект. Должен 10-15 лет работать над проектами своего начальника. Достижения молодого парня по принципу социального равенства (по интеллекту) Евангелие принудительно приписывает (авторство) начальникам – ворам интеллектуальной собственности.
Финансирование наукоемкой технологии нуждается в защите технологии патентом на изобретение, доказывающим мировую новизну технологии (софта). Патентное ведомство должно иметь в своем сайте страницу где изобретатель может по криптозащищенной линии без патентного поверенного патентовать изобретения по подсказкам экспертов ведомства
75)
АНТИХРИСТИАНСКАЯ ПАРТИЯ (статье 5 раз вредили) уменьшит число функций государства до лучшего баланса «бюджет – порядок на уровне Гражданского договора о государстве». Полная роботизация (железо размножается тысячи раз быстрее людей) Министерства обороны. Базовый основной доход для производства человеков.
Суперпрофессионалов от менеджеров, силовиков защитят законы деколлективизирующие человеческую мысль, профконкуренцию, собственность на средства производства и землю под ними, ответственность в экономике государства, жилье.
Борьба с эгоистическим стремлением класса силовиков к коллективизации профконкуренции, собственности, человеческой мысли, ответственности в экономике государства для создания паразитических рабочих мест своим родственникам, секс-партнерам.
Все классы общества и граждане экономически, юридически, профессионально (исключение – госдолжности) равноправны по Гражданскому договору о государстве. Запрет социального равенства.
Профессионально-генетическое неравенство людей механизмами рыночного отбора с господдержкой рыночных победителей, а не побежденных или вундеркиндов. Экономика строится больше на профессиональной гордыне (чести) чем на деньгах чтоб ликвидировать эмиграцию суперспециалистов (не хотят чувствовать себя предателями общества).
Специалисты-«финансисты» работают не за личную славу, не за моральную поддержку гражданского общества, а за 30 сребреников предателя интересов гражданского общества классовому эгоизму менеджеров, силовиков. Они разрушают моральный дух, экономическую безопасность гражданского общества, управляемость государства.
Гордыня – стремление удовлетворить манию профессионального величия, стремление к моральной поддержке гражданским обществом. Весы ВРЕД – ПОЛЬЗА универсальный инструмент оценки Антихристианской партией людей, процессов.
Силовики заменяют профессиональную гордыню деньгами для идеологической, экономической диктатуры класса силовиков. Это нарушение Гражданского договора граждан о государстве по выполнению принципа равноправной открытой классовой и индивидуальной конкуренции в профессиональной, идеологической, экономической сфере общества.
Профессиональная честь в экономике государства это достижение профессиональных целей в экономике государства с минимальной затратой природных ресурсов, оплачиваемого труда, денег, времени гражданского общества. Что соответствует военной безопасности государства, которая начинается с счетчиков воды, энергии, с экономии человеко-часов в экономике.
Чем сильнее личная профессиональная гордыня специалиста, его мания профессионального величия, тем он преданнее интересам гражданского общества, платящему ему профессиональной славой за поддержание общественного иммунитета к классовому эгоизму. Ничто так не ограничивает власть денег и классового эгоизма, как мания профессионального величия профессионалов созидательных профессий. Они пойдут на убытки, конфликты для защиты своих созидательных профессиональных прав, профессиональной чести. На профессиональную честь имеют право не только военные, но и рабочие, специалисты. Только людям с профессиональной честью можно доверить ответственную работу, требующую иммунитет от классового эгоизма.
Госфинансирование инновационной деятельности только через личные целевые банковские счета генераторов идей под их стопроцентный личный контроль с уголовной ответственностью за нецелевую трату.
Обязанность государства: поддержание работоспособности сети государственных, частных сайтов стопроцентного профессионального самообразования граждан. Основа борьбы с трудом: изобретения. Антихристианская партия добьется оформления патентов гражданами на изобретения в форме компьютерных файлов: можно сканы, видеоролики.
Антихристианская партия добьется нетрудоемкого патентования изобретений, упрощения патентного законодательства и процесса образования патентных поверенных.
Изобретательство удел бедных на рынке против богатых. Изобретатель может уничтожать оплачиваемый труд, антиобщественную власть корпораций. Антихристианская партия добьется официального признания существования древнейшей чисто человеческой профессии изобретатель, внесет в госреестр профессий.
Антихристианская партия отменит пошлины за патенты на изобретения. Это ужесточит выдачу патентов на изобретения (заявки по номерам на английском языке публикуют в интернете чтоб не патентовали другие страны), ослабит патентное блокирование крупными корпорациями наукоемкого бизнеса малых, средних фирм; усилит роль малого, среднего наукоемкого бизнеса.
Антихристианская партия сделает протезы бесплатными гражданам потерявшим руку, ногу по доказанной вине общества: генетические дефекты обслуживают платно.
Титулы ученых, инженеров временные. Госбюджетные деньги на науку, инженерию идут только генераторам идей по их планам. Остальные ученые получат пожизненную пенсию по личному вкладу в науку, могут примкнуть к финансируемому с госбюджета генератору идей.
Человеческий труд имеет правозащиту. Уничтожение оплачиваемого труда означает военную безопасность государства, которая начинается с минимума материальных и трудовых (человеко-часы труда) потребностей государства: минимальный расход в городских канализациях для защиты от эпидемий, минимальный расход энергоносителей, минимальный расход материальных и человеческих ресурсов на производство.
Минимализация затрат, горизонтальная организация экономики государства как системы юридического равноправия всех предприятий дает максимум мобилизационного потенциала государства.
Одна из причин госпереворотов – это цензура уничтожающая обратную связь гражданского общества с классом силовиков. Государство – машина управления страной, нуждающаяся в системе обратных связей в гражданском обществе. Гражданское общество равноправно с классом силовиков, имеет право знать что происходит в стране, у кого возникли антиобщественные интересы.
Антихристианская партия управляет государством по науке. Антихристианская партия освободит интеллектуальные, трудовые ресурсы общества для коммерциализации космоса, терраформирования Марса, колонизации соседних звезд
76)
ХРИСТОС УБИВАЕТ ЧЕЛОВЕЧЕСТВО
(статье 24 раза вредило государство) С 1970г 55 лет государство терроризирует меня Создателя (изобретателя) за невыполнение антиинженерных принципов. Составил их список с целью уничтожить первоисточник. Нашел: Евангелие – сборник карательных инструкций против граждан-рабов для экономической диктатуры класса силовиков. Для силовиков Евангелие – это Уголовный кодекс государства, Ветхий завет Библии – это Комментарии к Уголовному кодексу.
Евангелие – учебник рабовладельцев уничтожающий институт частной собственности (рабам запрещены частная собственность, предпринимательство, эксплуатация человека) и предпринимательства, институт эксплуатации человека человеком, институт семьи, институт профессиональной чести (гордыни). Христос идеолог ювенальной юстиции – дети рабов собственность рабовладельца.
Христиане настаивают на прямом смысле слов Библии для рабов, не признавая прямой смысл слов для рабовладельцев – Бог настолько глуп что не может понятно выражать свои мысли? Христиане внушают: нельзя быть богатым без преступлений. Евангелие – инструкции силовикам – законы против «нетрудовых доходов» (доходы предпринимателей, изобретателей…). Идея быть классом рабовладельцев чтоб все деньги, собственность, лучшие самки достались силовикам, делает силовиков марионетками Евангелия.
Христианский шариат Ветхий завет ещё более безнравственный, чем исламский шариат – призывы сжигать людей, забивать насмерть камнями, другие террористические призывы христианского шариата для привлечения внимания Прокуратуры.
Библия оправдывает 6000 тяжких преступлений положительных героев Библии, совершенных по чисто идеологическим мотивам, которые есть преступление для юридической науки. Антисоздательская книга Библия воспевает борьбу идеологических террористов против человека-Создателя – изобретателя, предпринимателя… Взамен человека-Создателя Библия навязывает другого Создателя – серийного убийцу инопланетянина Бога, который в Библии убил миллионы людей по чисто идеологическим мотивам и в 2-ом пришествии физически убьёт всё человечество. Никто не принес столько идеологической ненависти человечеству, как христиане.
С появлением христиан мир вошел в темную эпоху идеологического гостеррора за отказ отдать свой мозг в рабство Иисусу Христу, который за 2000 лет убил ~1 млрд чел по чисто идеологическим мотивам, которые есть преступление для юридической науки. По окончании Холодной войны христиане залили весь мир кровью христианско-фундаменталистского террора, организованного в нехристианских странах спецслужбами христиан с целью сокращения человечества до 1 млрд христиан.
Самые ожесточенные войны Истории – религиозно-идеологические войны между христианскими странами. Христиане подняли идеологическую нетерпимость государства на уровень геноцида народов-еретиков, многократно сократив население Европы. История христиан – это растянутая на тысячи лет Варфоломеевская ночь чисто идеологического террора по учебнику идеологических террористов Евангелие.
Предатели человечества христиане служат сыну серийного убийцы инопланетянина Бога (убил миллионы людей в Библии). Христиане – инопланетные агенты помогающие двум серийным убийцам (в 2-ом пришествии Христос физически убьёт всё человечество) очистить планету от людей. В Уголовном кодексе должен быть закон об уголовной ответственности инопланетных агентов, помогающих инопланетянину Богу и его незаконнорожденному сыну Иисусу Христу очистить планету от людей.
Евангелие – культ самоубийства человечества за грехи, созданный еврооккупантами в Азии для сокращения её населения. Христиане как праздник ждут 2-го пришествия Христа – он придет физически убить всех людей за грехи, сделает их копии в виртуальных планетах Рай, Ад. Евангелие вдохновляет христиан сокращать человечество: их Христос – Сокращатель человечества. Христиане поклоняются концу света. Евангелие – пропаганда самоубийства человечества. Христиане – главная угроза существованию человечества после изобретения ядерного оружия.
На Земле должно жить 600 миллиардов человек. Еды, воды, всего остального хватит на всех, если не будет культа самоубийства человечества с его спецслужбами сокращающими человечество. Человечество вместо войн на Земле которые непрерывно тысячелетиями устраивал культ самоубийства человечества, будет строить звездолеты для колонизации человеком нашей галактики.
Библия многократно прямо призывает к убийству атеистов. Христиане – инопланетные агенты инопланетянина Бога, которому помогают сократить человечество экотиранией, вакцинами, эпидемиями, цветными революциями, войнами.
Длительное существование рабовладельческого государства по Евангелию рядом с нормальными странами невозможно. Рабы убегут как бежали рабы из СССР. Неизбежна идея Мирового христианского правительства чтоб не убежали рабы и в попытке его создать ядерное самоуничтожение человечества. Идеал христианских силовиков: государство – монопольная рабовладельческая корпорация типа СССР. С 1992г США создают Мировое христианское правительство по образу и подобию СССР.
Для силовиков христианских стран Евангелие это сверхценные идеи для силовиков, превосходящие своей ценностью всё остальное в этом мире. Они готовы убить человечество, если не примет Евангелие как сверхценные идеи.
Для сокращения человечества до 1 млрд христиан христиане создали ООН чтоб законно блокировать банковские счета (Ливия, Ирак, Иран, Сирия…) стран, законно бомбить расчленять (Ливия, Ирак, Сирия…) для создания Мирового христианского правительства с целью сделать рабовладельческие принципы Евангелия едиными правилами жизни всего человечества. Затем: приняв нашу идеологию вы обязаны подчиняться нам.
ООН расчленила Ливию запретив использовать военную авиацию против вторгшихся в Ливию банд мусульманских агентов спецслужб христиан, заблокировав все её банковские счета. ООН не признает монополию государства на применение силы у себя.
Христиане расчленили Кению, Судан. Расчленение Судана, Сирии сорвали их президенты – христиане объявили их международными преступниками. Христиане создали ООН по принципу объединения наций, а не стран для разрушения стран террором нетитульных наций против титульной.
Приоритет прав государств выше приоритета прав наций
Приоритет прав человека выше приоритета прав нации
Приоритет прав семьи выше приоритета прав детей
Приоритет прав государства НЕ выше приоритета прав гражданина по Гражданскому договору о государстве – классовые интересы силовиков на ~50% противоположны интересам гражданского общества.
Ветхий завет Библии – учебник еврейских рабовладельцев. Евангелие – учебник европейских рабовладельцев отличающийся более жестким отношением к семье и детям раба (сокращение человечества). В Евангелии еврооккупанты довели до крайности принципы, бескомпромиссность Ветхого завета Библии.
Антисемитская книга Евангелие внушает – евреи враги, еврооккупанты добродушные ребята не портящие отношения с евреями. Эти добродушные ребята мечами изрубили на куски почти всех евреев в их Родине, сделав народом-изгнанником. Европейцы-христиане повторили геноцид, убив 6 млн евреев при президенте-католике Гитлере.
Ветхий завет считает евреев великой нацией, Евангелие заставляет ненавидеть евреев. Евангелие – учебник коммунистических интернационалистов уничтожающий историю, ценности всех наций.
Римляне создали Евангелие чтоб уничтожить историю и нацию евреев. В Римской империи евреев было ~10%, сегодня в этой территории в сотни раз меньше евреев – Евангелие инструмент сокращения численности азиатов.
Христиане вместе с еврейской историей уничтожили все древнегреческие, древнеримские библиотеки, все библиотеки Европы, Северной и Южной Америк, Африки, Азии до которых они добрались. Христиане за полгода цензурой сожгли Александрийскую библиотеку, сожгли женщину-математика Гипатию Александрийскую заживо содрав с неё кожу. Понравилось: веками публично сжигали ученых как еретиков.
Библия обещает христианам власть над всеми нациями: над китайцами, индийцами, вьетнамцами, афганцами, пакистанцами… Международный бандитизм, военные преступления, революции организуют христианские силовики по Евангелию, а не миллиардеры, евреи или корпорации. 1962-1975г: христиане организовали (понимали друг друга без слов) убийство 3 млн вьетнамцев, камбоджийцев, лаосцев.
При обороне еврейской крепости агент еврооккупантов еврейский военачальник Иосиф Флавий, эксплуатируя религиозные чувства предложил еврейским солдатам покончить жизнь самоубийством чтоб не попасть в плен иноверцам. Еврооккупанты дали Иосифу фамилию его кукловода – сокращателя еврейской нации императора Тита Флавия. Предложив использовать иудейский миф о скором приходе еврейского царя-освободителя от оккупантов, Иосиф Флавий с еврооккупантами тайно сочинили Евангелие про еврейского царя Иисуса Христа.
Иосиф Флавий отвечал перед еврооккупантами за то чтоб текст антисемитской книги Евангелие внушал молодым евреям – это иудаизм. За успешный обман молодых евреев Иосифу Флавию поставили публичный памятник в Риме, дали статус официального римского историка, чьи книги христиане сохранили лучше книг всех остальных римских историков.
Иисус Христос пропагандировал коммунистическую идеологию созданную еврооккупантами для экономического геноцида народов Азии, Африки. Еврооккупанты агентурой пропагандировали учебник коммунистов Евангелие для экономического геноцида иудеев, вызвав 2 иудейских восстания.
Студент парижского университета, член компартии Франции, агент Франции Пол Пот коммунистической идеологией очищал от азиатов Камбоджу. Христос коммунистической идеологией очистил еврооккупантам от евреев их Родину.
Евгеника Евангелия уничтожает нехристианские генотипы человека с целью СПАСЕНИЯ ДУШИ ЧЕЛОВЕКА – генетический отбор заменяющий людей думающих обществом рабов-догматиков: в генетической программе человека запрещены человеческие цели, только животные цели – чистый лист бумаги в который силовики запишут Евангелие.
Всё что не от господа будет искоренено – слова Христа о человеке без человеческих целей генетической программы – чистый лист где запишут Евангелие.
Блаженны нищие духом ибо их есть Царствие Небесное – слова Христа. Сделать людей нищими духом; агентурным террором убить душу человека-Создателя.
Блаженны кроткие, ибо они наследуют землю – слова Христа. Для Евангелия человек настойчивый в достижении неживотных (человеческих) целей – враг. Евгеника Евангелия создает породу рабов без воли к жизни, готовя самоубийство человечества.
Кто не со Мною, тот против Меня – главный принцип террористов – призыв Христа к террору против нехристиан, дающий силовикам право скрытого агентурного гостеррора против граждан мешающих евгенике Евангелия. Евгеника Евангелия уничтожает нехристианские генотипы граждан, блокируя им размножение.
Цель евгеники Евангелия – сократить человечество до 1 млрд христиан Мировым христианским Правительством. Мировое правительство создают генералы контрразведки, разведки (глубинное Правительство) христианских стран, христианские миссионеры. Спецслужбы христианских стран сокращают человечество экотиранией, революциями, расчленением стран.
Мировое христианское правительство не допустит колонизации Галактики человеком – колонисты став сильнее вернут суверенность странам. Причина стремления христиан создать Мировое правительство – учебник рабовладельцев Евангелие строящий рабовладельческое государство по образу Римской империи. Для пресечения бегства рабов в другие страны рабовладельческое государство должно захватить всю планету как Мировое Правительство.
Христиане в своих 330 зарубежных военно-бактериологических лабораторий ищут технологии стерилизации 7 миллиардов человек вирусами, вакцинами. Христиане в 21 веке через ООН убили полмиллиарда африканских детей стерилизовав вакциной от столбняка 140 млн африканских женщин – у них 6-7 детей на семью. При эпидемиях в Африке туда рвутся спецслужбы христиан помогать больным сбегать с карантина.
Африканцы строят фармацевтическую фабрику – христиане объявляют о производстве химического оружия, бомбят фабрику как в Судане 1998г. Христиане создают вакцины для ослабления здоровья людей, чтоб силовики имели возможности медицинского гостеррора против граждан не выполняющих госидеологию. Все должны максимально зависеть от медицины государства, цифровой валюты, электричества.
Меня Создателя-Инженера 55 лет христианская инквизиция – контрразведка (система страхования власти от гражданских войн и вмешательства иностранцев) – за невыполнение антисоздательской антиинженерной идеологии Евангелие терроризирует агентурным моральным и биохимическим террором, вредительством. Мне инквизиция запретила профессию инженера за невыполнение заповеди-2 Библии – нельзя никого и ничего любить (любовь запрещена) кроме природы – нельзя любить профессию инженера!
Христиане стремление граждан к профессиональному превосходству над людьми рассматривают как нарушение заповеди-2 Библии (нельзя любить профессию), карают агентурным гостеррором.
У класса силовиков нет права превращать свой класс в Бога – права класса общества кончаются там где начинаются права гражданского общества.
Евангелие социальным равенством запрещает госвласть людям с высоким интеллектом – это невидимый фронт против против предпринимателей, интеллигенции; против людей чей интеллект выше чем у силовиков. Социальным равенством – диктатурой дураков – христиане уравнивают влияние людей на ход Истории чтоб остановить технический прогресс.
История христианских стран Европы – вечная диктатура дураков принимающих самые катастрофические решения – две Мировые войны, 4 коммунистические революции (Франция, Россия, Германия, Венгрия), бесконечные войны и взаимные санкции. Диктатура дураков выбирает катастрофические решения чтоб борьбой с хаосом христианские силовики накачали себе власти против гражданского общества и все лучшие самки, лучшая собственность в стране принадлежали силовикам как в СССР.
Силовики идеей социального равенства заставляют умных ненавидеть государство, чтоб не претендовали на госвласть. Любовь к государству не входит в заповедь-2 Библии – рабам запрещены эмоции, личные интересы, цели. Заповедь-2 дал инопланетному агенту африканцу Моисею инопланетянин Бог. Социальное равенство – это вечная война силовиков, бедных и глупых граждан против богатых, умных; против предпринимателей, интеллигенции.
Социальное равенство – вредительство тысяч секретных инструкций против умных, против профессиональных богатырей. Никто кроме христиан не создавал страны СОЦИАЛЬНОГО РАВЕНСТВА! Чем больше христиане зависят от профессии, тем меньше зарплата (замена граждан гастарбайтерами) – социальное равенство ограничивает влияние профессии на общество.
Каждая страна это тупая половина (интеллект ниже среднего) и умная половина (интеллект выше среднего). Антисуперменские страны поддерживают интересы тупой половины против умной половины: всё решает не интеллект и личные качества, а личные связи как у заключенных в тюрьме.
Антисуперменские страны вредят изобретателям бюрократическим усложнением, удорожанием процесса патентования изобретений, создают новые способы блокирования изобретателей. Нормальное государство опирается на лучших специалистов и самых полезных для экономики граждан.
Страны суперменов поддерживают умную половину, поощряя положительный человеческий фактор (талант, гений). Тупая половина неспособна наказать государство за нарушения прав дураков. Умная половина за нарушения прав умных на профессиональное неравенство доводит государства до потери территорий, суверенности.
Люди тупой половины общества неспособны к профконкуренции в профессиях требующих интеллекта. Тупая половина общества всюду уничтожает роль индивидуума, человеческий фактор: незаменимых нет. Коллективизация профконкуренции, собственности, человеческой мысли, ответственности – это борьба тупой половины общества против умной половины общества.
Христиане утверждают – тупыми гражданами управлять легче, чем интеллигенцией. Чем менее интеллектуальны люди, тем менее уравновешены, больше конфликтов, преступлений – больше прав, денег накачает себе класс силовиков.
Христиане не признают что вклад человека в общество – разница между вариантами:
1. человек есть вместе с принесенной им пользой или созданными им рабочими местами.
2. этого человека с его вкладом в общество не существует.
Равноправие усиливает сильных, ослабляет слабых. Равенство ослабляет сильных, усиливает слабых. Евангелие пропагандой социального равенства и бедности убило крупные страны Европы.
Богатство граждан, богатство семьи, ее защита от государства – главные ценности. Христиане критикуют общество потребления с целью уменьшить зарплату – борьба с богатством и семьей по Христу.
Силовики христианских стран сочинили право человека быть трансгендером с детского возраста чтоб натравив одних членов семьи против других как требовал Христос, национализировать детей. Христиане уничтожают семью чтоб между людьми не было связей, которые не может разрушить государство.
Частную собственность христиане законами превращают в средство нападения государства на граждан, на семью, на предпринимателя. Право частной собственности – право собственности, за владение пользование и распоряжение которой собственник не обязан платить налоги, принудительные страховые взносы. Надо платить – это не частная собственность, а разновидность государственной или коллективной собственности.
По учебнику рабовладельцев Евангелие государство постепенно законами отнимает у граждан средства защиты от государства. Эти средства: частная собственность (налоги, штрафы, сборы), интеллектуальный или профессиональный авторитет (запрет профессионального самообразования, запрет на профессию, агентурное вредительство), семья (ювенальная юстиция).
Госсобственность – собственность класса силовиков. Общественная собственность (собственность граждан, негосударственных организаций) – собственность которой государство может распоряжаться только в крайних случаях (война, чрезвычайная ситуация). Христианские страны по Евангелию законами постепенно уравнивают с госсобственностью общественную и частную собственность, постепенно ликвидируя институт частной собственности.
Христиане главных врагов ТРУДА – изобретателей лишают прав человека по обвинению в мании изобретательства чтоб не уничтожали оплачиваемый труд. Изобретатели 200000 лет защитой от труда давали человеку жизненную энергию для эволюции интеллекта. Христиане пошлинами на патенты лишили изобретателей их профессии. Налог за владение, защиту права интеллектуальной собственности ИЗОБРЕТАТЕЛЯ разрушает институт частной собственности.
Евангелие социальным равенством разрушает все виды негосударственной организованности и иерархии начиная с семьи. Христиане разрушают всё объединяющее людей в семью, в группы единомышленников; заставляют нации стыдиться своего прошлого по принципу изначальной виновности человека. Христиане постепенно создают монополию государства на разделение общества, на собственность и предпринимательство, на иерархию. Христиане уничтожают право людей объединяться в группы, клубы по социальному признаку.
Библия: В ПОТЕ ЛИЦА ТВОЕГО БУДЕШЬ ЕСТЬ ХЛЕБ. Бог проклял людей вечным трудом в поте лица за 1-й грех. Лишним трудом Библия кастрирует интеллект человека. Христос запрещает быть богатым, служить профессиональной гордыне, хранить верность семье. Результат: развитие граждан и стран в направлении грабежа, геноцида других народов за природные ресурсы. У них христиане агентурой создают террористические организации, революциями, гражданскими войнами сокращают население.
Жизнь в христианской стране – минное поле идеологических силовиков, ловушками, уголовными провокациями загоняющих граждан в статус «виновный» по принципу изначальной виновности человека – человек с рождения виновен перед классом силовиков тем что его предки Адам, Ева съели яблоко с огорода Бога: ответишь за предков! Бог проклял всех людей за 1-й (!!!) грех – съели яблоко.
Принцип изначальной виновности человека дает Богу в лице класса силовиков право убивать граждан. В Библии Бог убил миллионы людей. Принцип изначальной виновности человека дает госвласть моральным уродам, марионетками компромата чтоб хаосом увеличить финансирование силовиков.
Чернобыльская катастрофа: небольшой аварией заставляли подчиненных причинить вред государству чтоб за вину загнать в рабство. Действия христиан не объяснит логика – Евангелие секретными инструкциями вбивают в сознание агентура, школа, вузы.
Вопрос голода решало Евангелие – религиозными войнами убило за тысячи лет миллиарды «лишних» европейцев. В Юго-Восточной Азии вопрос голода решала частная инициатива: террасное земледелие; ели собак, летучих мышей, крыс, змей, насекомых – плотность населения в разы выше, чем в богатой водными, продовольственными ресурсами Европе.
По учебнику идеологических террористов Евангелие силовики христианских стран идеологическим гостеррором заставляют народ ненавидеть свою страну. Затем агентурным гостеррором заставляют народ Родину любить, чтоб за эту «работу» налогоплательщики содержали паразитические рабочие места миллионов идеологических силовиков и их агентуры (секс-партнеры, родственники, уголовники...).
Против граждан-рабов заповедь-2 Библии: запрет ярких положительных эмоций без пользы классу силовиков. Не выполнят – агентура инквизиции добивает бандитскими законами Иисуса Христа:
«враги человеку – домашние его»
«Отец будет против сына и сын против отца, мать против дочери и дочь против матери, свекровь против невестки своей и невестка против свекрови своей»
«Не думайте, что я пришёл принести мир на землю; не мир пришёл я принести, но меч, ибо я пришёл разделить человека с отцом его, и дочь с матерью её, и невестку со свекровью её…»
«Думаете ли вы, что Я пришел дать мир земле? Нет, говорю вам, но разделение. Ибо отныне пятеро в одном доме станут разделяться: трое против двух и двое против трёх»
«кто хочет душу свою сохранить, тот потеряет её»
«сберегший душу свою потеряет ее»
«всё что не от Бога, будет искоренено»
«я человек жестокий, беру чего не клал и жну чего не сеял»
«не заботься о завтрашнем дне»
«кто возвышает себя, тот унижен будет»
«кто хочет быть первым между вами, да будет вам рабом»
«кто имеет, тому дано будет, а кто не имеет, у того отнимется»
«удобнее верблюду пройти сквозь игольные уши, нежели богатому войти в Царствие Божие».
Всё что имеешь продай и раздай нищим – говорит богатому бомж-коммунист Христос чтоб богатые стали бомжами. Коммунист Христос в Евангелии бьет плетью предпринимателей, портит их частную собственность чтоб проклятые капиталисты прекратили преумножать семейный капитал. Евангелие – защищаемый цензурой толерантности учебник коммунистов.
Ты (БОГАЧ) получил уже доброе твое в жизни твоей, а Лазарь (НИЩИЙ) – злое; ныне же он здесь (В РАЮ) утешается, а ты страдаешь (В АДУ) – эти слова Христа как призыв к социальному равенству людей дали коммунистические революции инквизиции (контрразведки) в Франции, Венгрии, Германии, России. В нехристианских странах это невозможно.
Контрразведка христиан самая коллективистская госслужба, коммунисты самая коллективистская партия – совпадает конечная цель – экономическая, идеологическая диктатура силовиков. Коммунист Христос сделает Коммунизм в христианских странах неизбежным.
Разрушение Евангелием института частной собственности и предпринимательства превратило евреев в рабов под угрозой голода, в чем убедились (голодоморы) граждане Третьего Рима – СССР. Евреи осознав экономический геноцид подняли восстания: Иудейские войны. В Иудейской войне-2 еврооккупанты геноцидом рассеяли евреев по миру. Третий Рим евгеникой Евангелия рассеял русских по миру.
Иудейские войны от разрушения Евангелием института частной собственности и предпринимательства повторили венгры 1956г, чехи и словаки 1968г, поляки 1989г, русские 1991г. Евангелие превратило в Ад жизнь миллиардов людей, включая сотен миллионов убитых коммунистической идеологией Христа в Франции, Венгрии, Германии, России, Чехословакии, Польше, Югославии, Монголии, Китае, Вьетнаме, Лаосе, Камбодже, Корее…
В России царская контрразведка организовала государственный атеизм, Коммунистическую революцию с целью убийства евгеникой Евангелия 50 млн чел нехристианского генотипа. С аналогичной целью контрразведки Франции, Венгрии, Германии организовали свои Коммунистические революции.
Контрразведка христианских стран мстит гражданам за невыполнение идеологии Христа. Они иностранные агенты служащие иностранцу – еврейскому царю Христу, а не гражданскому обществу.
Евгеника Евангелия навязывает однополые браки чтоб не размножались. Христиане революциями, международными санкциями, экотиранией сокращают население нехристианских стран.
Евгеника Евангелия в Европе: препарированием трупов заражали руки акушеров-студентов медицинских вузов, затем сразу работа акушером чтоб заражая убить детей бедных семей. Инквизиция инсценировала самоубийство врачей заставлявших акушеров стерилизовать руки.
Евгеника Евангелия создала ювенальную юстицию для национализации детей. Государство отнимает детей, отдает платным (платят налогоплательщики) семьям агентов инквизиции, готовящих агентов Христа.
Коммунизм – рабовладельческий строй по Евангелию. Выполняющий функции принуждения, управления, учета, контроля, распределения надзиратель в 2-5 раз дороже раба. Рабовладелец экономя деньги прикрепляет к надзирателю максимум рабов коллективизацией труда, укрупнением предприятий. Поэтому христиане враги единоличников, индивидуалистов.
Экономическая, военная, политическая безопасность государства основаны на балансе прав всех классов общества. Евангелие рушит баланс. По Евангелию силовики – класс рабовладельцев, граждане – рабы.
Заповедь-2 Библии: нельзя любить профессии Создателя: художник, инженер, изобретатель… Изобретателям христиане не дают читать научно-техническую литературу (крадут книги, блокируют доступ к книгам библиотек), делать модели техники (уничтожают), общаться с нужными людьми, учиться в технических вузах (агентурный биохимический террор), не дают создавать свою изобретательскую фирму – уничтожают материально-техническую базу агентурой.
Положительные эмоции от общественно полезной деятельности запрещает заповедь-2 Библии: НЕЛЬЗЯ НИКОГО И НИЧЕГО ЛЮБИТЬ. Человек без положительных эмоций в жизни превращается в зверя, готового убивать людей, вредить обществу: чем больше таких в гражданском обществе, тем финансово, политически сильнее класс силовиков. Христиане законами, агентурным террором против личности, методами содержания людей в тюрьмах превращают людей в зверей.
Евангелие превращает людей, страны в зверей кидающихся друг на друга. Христиане бесконечными войнами, революциями расчленили, обезлюдили свои страны.
Христиане насаждают странам РЕЛИГИОЗНО-РАБОВЛАДЕЛЬЧЕСКУЮ ДЕМОКРАТИЮ как в Древнем Риме, которой не нужен технический прогресс: для работы рабы, религия не терпит конкуренции с наукой. Снижают экономический потенциал стран для сокращения населения.
Христиане уничтожают памятники истории, культуры чтоб через поколения народы перестали существовать как нация, потеряли чувство ценности их территорий и дух народа на защиту суверенности страны. Христиане агентурой спецслужб организовали уничтожение крупнейшей в мире статуи Будды в Афганистане 2001г, уничтожение исторических библиотек Ирака 2015г, памятников истории Пальмиры 2016г в Сирии.
Нравственность народу не даст Библия, многократно призывающая к убийству атеистов. Духовность народа основана на исторических успехах своей, не чужой страны.
99,9% своего госбюджета контрразведки христианских стран идет на скрытый агентурный террор (поджоги, диверсии, убийства...) против граждан не выполняющих идеологию Христа.
Инквизиция устраивает агентурный террор против граждан > 4 дней ни с кем не разговаривающих: мстят за отказ от затрат энергии на личные связи – концентрация жизненной энергии на личную цель рабам запрещена. Евангелие принуждает тратить жизненную энергию на личные связи как в тюрьме. Евангелием запрещены друзья от интуиции. Друзей-агентов назначает инквизиция карая противодействие агентурным гостеррором.
Контрразведка христианских стран агентурой внедряет религии с целью разделения наций религией. Христиане ищут кому выгодно объединяться по профессиональному или общественно-полезному признаку – разрушают их союзы, натравливают друг на друга чтоб их влияние не мешало пропаганде Евангелия. Христиане направляют мир к ложным преступным идеям, заменяя ценности человечества фальшивыми чтоб натравлять всех против всех.
Пропаганда святых мучеников внушает терпимость к идеологической нетерпимости государства. Бог Библии злобная нелюдь проклявшая людей, убившая в Библии миллионы людей – общение с ним безопасно только через священника. Большая дистанция общения до самого кровавого в Истории человечества Бога усложняет христианскую иерархию. Христианские страны самые иерархические, самые идеологизированные.
Евангелие единственная в мире коммунистическая религия, единственная стукаческая религия – ритуал стукачества исповедь есть только у христиан. Христиане заменой слова ПРОПАГАНДА на ИСПОВЕДУЮТ уклоняются от обвинений в пропаганде Евангелия за деньги налогоплательщиков контрразведкой, разведкой (за рубежом).
Христиане скрытым террором против людей профессиональной гордыни нарушают право человека на моральную поддержку обществом. Двигатель технического прогресса – профессиональная гордыня, мания профессионального величия, мания изобретательства, а не оплачиваемый христианскими 30 сребрениками лишний оплачиваемый труд, созданный «экозаконами» для ускорения смены транспортных средств с целью выжать с граждан максимум налогов.
На места инженера-маньяка величия христиане ставят работающих не за славу, а за деньги предателей гражданского общества – создают товар недолговечным неравнопрочным для роста налогов от продаж запчастей, техобслуживания. Профессиональную гордыню (честь) Создателя христиане убивают агентурным физическим, моральным и биохимическим террором – Христос угрожает болезнями.
Христианская экономическая лженаука преступной идеологией максимума оплачиваемого труда для выжимания максимума налогов с общества, снижает уровень жизни гражданского общества, несмотря на рост в десятки, сотни, тысячи, миллиарды (компьютеры) раз производительности почти в всех видах работ за 100 лет. Евангелие разменивает уровень жизни на рост числа лишних функций государства.
Христиане экологическими законами снижают уровень жизни. 1974-2004г себестоимость средств производства упала втрое: цена автомобиля должна была снизиться вдвое к зарплате рабочего как в бытовой технике. 1974-2004г: большие холодильники подешевели вдвое к зарплате среднего рабочего, но массовые автомобили от экозаконов подорожали втрое. Цена автомобилей взлетела втрое из-за системы образования с сверхузкой специализацией и лишними принудительными знаниями вместо созидательного участия студента в профконкуренции Мирового рынка.
Христиане законами натравливают общество на корпорации чтоб выжать с корпораций максимум оплачиваемого труда, налогов: законы запрещают гражданину выращивать на своем участке земли растения чтоб не платить корпорациям за еду, лекарства. Виноваты не корпорации, а силовики принявшие закон для роста налогов.
Христиане поднимают пенсионный возраст человека до 70 лет чтоб не общался с детьми, внуками. Умение человека 60-80 лет обобщать жизненный опыт короткими понятными фразами – угроза Евангелию. Христиане судят родителей защищающих право на обучение дома школьным предметам (экстерн) чтоб школа не учила детей наркомании, насилию, сексу, вредным привычкам от агентов инквизиции.
Сопротивление гражданского общества меняет приоритеты христиан – ослабляя один принцип Евангелия, усиливают давление другого принципа.
В племенах люди обогащались трудом или входили в банду вождя племени – подчиняли племя. Трудящиеся богатели, банды вождя нет. Банды объявив предметы святыми объектами поклонения создавали религии с целью повысить вероятность законно обвинить трудящихся в нарушении догм религии, отнять собственность, сделать рабами. Вождей с бандами сменили государства. Религии часть классовых интересов класса силовиков. Остальные классы общества не нуждаются в антиобщественных целях религий.
Китай единственное государство прожившее 5000 лет, потому что Конфуций, его предшественники заменили религии идеей мандата на правление государством от системы оценки носителей госвласти неизвестными экзаменаторами, защищающими интересы гражданского общества: граждане не рабы как у христиан, а ученики.
Неадекватны, не имеют права занимать должности с госвластью люди всерьез думающие что индивидум Бог вопреки законам физики, химии, биологии появился как Маугли на пустом месте без развития в обществе, создал все звезды, галактики. Эти люди неспособны адекватно понимать – миром управляют законы физики, химии, биологии, научной логики, а не вера.
Отделить религиозную идеологию от государства, уничтожить секретные инструкции основанные не на научной логике, а на религиозной идеологии
institutrobotov.ru/Христос.odt – скачиваемый файл
77) Всю Историю террористические рабовладельческие религии сочинял класс силовиков. Принцип народ – рабы класса силовиков – узаконивала статья Конституции о руководящей роли Компартии (рабовладельческая партия силовиков) в государстве. Компартию в Конституции заменили – Богом – народ рабы божьи, Бог – класс силовиков. Одну рабовладельческую партию власти сменила другая рабовладельческая партия.
В документах граждан, в гербах городов, госорганизаций – двуглавый орел – символ объединения светской и религиозной госвласти Древнего Рима, Византии. В России двуглавый орел – это антиконституционный символ – нет у государства права на религиозную госвласть. Светское государство – государство без религиозной госвласти.
Государство использует деньги налогоплательщиков-атеистов (статья Уголовного кодекса против научных атеистов) против научных атеистов. Секретные инструкции узаконили Запретный список профессий для атеистов
Надо:
1. отменить законы против атеистов
2. заставить церковь платить все налоги государству
3. отменить секретные инструкции контрразведки основанные на преступных принципах Библии
4. отменить секретные черные списки профессий госслужащих, запретных для атеистов
5. убрать Бога с Конституции. Ввод Бога в Конституцию делает граждан рабами божьими. У рабов нет прав, на рабов Конституция не работает
6. убрать религиозные символы с госсимволики.
Есть юридический признак рабовладельческого государства – нет в России частной собственности на землю в городах (у рабов нет права частной собственности). Необходимый признак капитализма – частная собственность на землю в городах для защиты частных предприятий от злоупотреблений госвласти.
800 пиратских копий римско-католической церкви – пираты укравшие у римско-католической церкви её интеллектуальную собственность: текст Евангелия, текст околобиблейских сказок.
Попы, муллы наживаются на деньгах обманутых клиентов, которым внушили потребность платить деньги за жилплощадь в сказочном Раю инопланетного божьего царства. Попы, муллы продавая клиентам жилплощадь в Раю, не могут провести инспекторов госорганов власти в Рай – не знают где находится. Попы, муллы как мошенники должны сидеть в тюрьме, а не продавать духовный опиум для народа.
Церковь должна предоставить госорганам отчет где физически находится по их словам реально (физически) существующий Рай, как умершие физически попадают в Рай. Не смогут – мошенничество церкви доказано, мошеников в тюрьмы, церковь запретить как мошенническую организацию.
В России государство инструмент пропаганды «сверхценных идей» Евангелия – культа самоубийства человечества: серийный убийца Христос в 2-ом пришествии физически убьёт всё человечество, сделает с убитых копии в виртуальных планетах Рай, Ад. На рабочие места госчиновников прокрались представители этого террористического культа самоубийства человечества, прямо призывающего к убийству еретиков. Им должно быть запрещено занимать госдолжности
78) ДВОРЯНЕ
Интересы высших ступеней госвласти часто совпадают с интересами гражданского общества. Интересы нижних, средних ступеней госвласти не совпадают. Функция высших ступеней госвласти защита общества от эгоизма нижних, средних ступеней госвласти.
Цари дарили госслужащим земли в неконтролируемых (плохие дороги, связь) царем районах. Феодалы наделив себя неограниченными правами превратили госвласть в закрытое акционерное общество феодалов, где права у феодалов. Ответственность за их действия у царя не имеющего возможности вмешательства под угрозой его убийства контрразведкой из детей феодалов. Дворяне – дети обедневших от быстрого размножения феодалов.
Царь Иван Грозный террором против дворян восстановил вертикаль власти. Классовые интересы дворян снова разрушили вертикаль власти. Екатерина-2 восстанавливала вертикаль власти. Дворяне дали понять: не прекратит – убьют. Прекратила.
Царь Павел 1 восстанавливал вертикаль власти сектой скопцов (евнухов) по опыту правителей Турции, Китая, Персии. Дворяне в ответ заручились поддержкой английского посольства в убийстве Павла 1. Английское посольство – дворяне Британии, заблокировавшие переход ключевые должности силовиков в России от дворян к евнухам как в Турции. Боялись это сблизит интересы России, Турции. В европейских странах власть у дворян, как в России.
Евнухами царской секты были русские военачальники Суворов, Кутузов… Евнуха Кутузова ослепил на один глаз дворянин. Из-за евнухов дворяне-силовики убили царя Павла 1 защищая свои рабочие места силовиков. Из-за отмены крепостного права дворяне начали серийно убивать царей защищая свои права рабовладельцев.
Переход рабочих мест силовиков от дворян к евнухам и отмена крепостного права испугали дворян. Они сетью марксистских террористических организаций («Народная воля», «Черный передел»…) превратили государство в колхоз СССР, где правили госфеодалы-дворяне (председатели колхозов, партаппаратчики).
СССР вызвал у Запада страх за местные вертикали власти после коммунистических революций в Франции (1789г), Венгрии (1918г), Германии (1918г), России (1917г).
История России – борьба между
МОНОТЕИСТСКОЙ ПАРТИЕЙ-1 – «государство это единая акционерная корпорация силовиков с вертикальной иерархией и экономическими ограничениями для вертикали власти»
и
РЫНОЧНОЙ ПАРТИЕЙ-2 – «государство это экономика из юридически независимых предприятий с горизонтальной иерархией с ограничением вертикали власти в основном по принципу – подчиненный моего подчиненного не мой подчиненный».
Верхушка государства тяготеет к ПАРТИИ-2 как саморегулируемой конструкции не требующей сильной зависимости царя, президента от дворян. Средние, нижние уровни госвласти тяготеют к ПАРТИИ-1.
Территориальное наследование власти (клановая система власти) и контроля над местной экономикой (ПАРТИЯ-1) – результат противостояния «контрразведка – Царь», затем «контрразведка – Политбюро». Маятник власти «контрразведка – Политбюро» после Хрущева качнулся в пользу контрразведки. Хрущев с его совнархозами тяготел к ПАРТИИ-2. Марионетка контрразведки Брежнев с ПАРТИИ-1 заменил вертикаль власти акционерным обществом госфеодалов с ПАРТИИ-1.
Защищая власть Политбюро от контрразведки Горбачев с ПАРТИИ-2 боролся за разрядку международной напряженности, спасая экономику России от банкротства. Союз контрразведки России и Республиканской партии США не дал Горбачеву сохранить власть Политбюро (аналогично царь отдал власть контрразведке 1917г), привел к гражданской войне (убиты ~1,5млн агентов спецслужб за 20 лет) фракций силовиков.
Дворяне как иностранные агенты взрывали русских царей, служа иностранцу – еврейскому царю Христу. Русских царей взрывали за попытки рабовладельческое государство построенное по учебнику рабовладельцев Евангелие, превратить в капиталистическое (свободный труд) государство. Дворяне враги капитализма.
Царь Александр-2 с ПАРТИИ-2 отменил феодальное право, ввел Суд присяжных, права человека, адвокатов, подготовил Конституцию. Дворяне с ПАРТИИ-1 в ответ контрразведкой создали сеть террористических организаций, 8 раз взрывали взорвали царя за 3 дня до принятия им Конституции.
Вертикаль власти разрушают местные силовики с ПАРТИИ-1: поощряют преступность, беззаконие чтоб представ перед населением как Спаситель общества (по Евангелию) качать себе больше прав, финансирования для конкуренции с федеральными силовиками. Вертикаль власти восстанавливали цари Петр-1 (29 покушений на жизнь контрразведкой), Александр-2.
На оккупированных территориях губернаторы Чингисхана подавляли местную вертикаль власти Советской властью – голосованием Совета депутатов (депутаты – люди не распоряжающиеся средствами производства на которых работали) манипулировали элитой русской нации. Эту оккупационную систему совпадающую с христианским принципом социального равенства, монголы внедрили через самого преданного агента – церковь.
Этой системе царь Петр-1 с ПАРТИИ-1 противопоставил 14 иерархических ступеней госвласти при оптимальных 5. При 14 ступенях госвласти ответственность коллективизирована – наказать виновного невозможно не тронув много чиновников – нет обратной связи, логики.
Проблемы избытка ступеней власти качнули маятник власти обратно к советской системе – дворяне с ПАРТИИ-1 убивали царей, скрывая ситуацию толкали царей к самоубийственным действиям (расстрел демонстрации рабочих 1905г).
Маятник так шел до 1983г: Андропов с ПАРТИИ-1 начал восстанавливать вертикаль власти. Андропова отравили дворяне. Горбачев для защиты Политбюро от контрразведки искал союзников за рубежом, сделал им уступки ставшие катастрофой для безопасности России от NATO. Вертикаль власти и безопасность России от NATO восстановил Владимир Путин
Вертикаль власти это:
1. наказание лиц, организаций нарушающих принцип равноправия граждан
2. наказание лиц, организаций нарушающих принцип: права человека и семьи по приоритету выше прав наций и рас, прав общественных и религиозных организаций
3. наказание лиц, организаций нарушающих принцип: приоритет федеральных законов выше законов административных единиц государства
4. права представителей федеральной власти при исполнении выше прав представителей местных властей в равных условиях. Могут быть усилены инструкцией с центра
5. в каждой тематике приоритет федеральных программ, планов выше приоритета программ, планов местных властей
6. федеральные власти обязаны, имеют право снять с должностей представителей местной власти, если количество родственников, представителей нетитульной нации государства на госдолжностях превысило территориальные нормы федерального закона.
7. титульная нация при распределении госдолжностей на всей территории государства имеет преимущественное право при равных условиях.
Работать на полях, заводах дворяне не хотели. Хотели как их деды феодалы паразитировать на гражданском обществе. Их главный идеолог писатель Лев Толстой с ПАРТИИ-1 предложил всю экономику государства превратить в одно предприятие, принадлежащее классу дворян, обеспечивающее дворян рабочими местами менеджеров.
Для монополии класса дворян на всю экономику государства, Толстой требовал запрет частной собственности, публично отказался от частной собственности на своё дворянское имение, обобществил его в колхоз.
В невидимой войне царя от дворян защищали личная гвардия, церковь. Гвардия погибла в Мировую войну-1. Религию Толстой предложил запретить для уничтожения монархии, чистки общества от оппонентов дворян.
Дворянин Ленин вместе с дворянами царской контрразведки выполнил идеологию Толстого, назвал дворян «вооруженным рабочим классом», превратил всю экономику государства в одно предприятие принадлежащее классу дворян, объявил войну против предпринимателей (буржуи, капиталисты), освободил дворян от призыва в Армию.
Под влиянием Льва Толстого царская контрразведка в Мировую войну-1 устраивала агентурой в частных предприятиях диверсии, проблемы с поставками, блокировала частных военных предпринимателей. Госпредприятиям проблем не создавали – строили монополию госпредприятий на разработку, производство военной техники.
Из всех вариантов развития государства класс силовиков обычно выбирает вариант максимума насилия для гарантированной победы класса силовиков против остальных классов – события 1917-1918г в России. У самого антиинтеллектуального класса – силовиков – в эпоху кризисов побеждают самые глупые фракции – любители заветов предков – последней господствовавшей религии. Примеры: Россия, Турция в 20 веке.
Фракция
КОНТРРАЗВЕДЧИКОВ-ЕВАНГЕЛИСТОВ – представители самой антиеврейской формы христианства – Евангелие без Ветхого завета – Ветхий завет еврейский, евреи «христопродавцы», враги Христа. Европейская антисемитская книга Евангелие несет дух европейского национализма, породивший Адольфа Гитлера, вишистов в Франции.
Главный идеолог евангелистов феодал Лев Толстой называл церковь еврейской (Ветхий завет Библии) сектой, всё в жизни сводил к минимальному числу принципов на основе Евангелия, ставя его выше законов государства. Лев Толстой вел борьбу против церкви.
В Евангелии бомж-коммунист Иисус Христос уничтожает институт частной собственности и предпринимательства, институт семьи, институт профессиональной чести (гордыни) народа, институт накопления личного и семейного капитала. Христос лично бил плетью предпринимателей, портил их товар чтоб проклятые капиталисты прекратили преумножать семейный капитал.
«Всё что у тебя есть продай, раздай людям» – вёл коммунистическую пропаганду Христос. Его идеология привела СССР к экономическому краху. Экономическую программу Христа в научной форме (марксизм) изложил Карл Маркс.
Евангелисты внушали всем сказку о безмерной (ни в чем нет меры, баланса) душе русского народа, которым нельзя управлять без гостеррора. Идеал пропаганды евангелистов – вождь дворян Сталин.
План евангелистов:
Акт-1: антипредпринимательской компанией ликвидировать частную собственность и предпринимательство, антирелигиозной компанией убить (евгеника Евангелия) миллионы идеологических конкурентов Евангелия, в основном интеллигенцию.
Акт-2: религия воскресает как Спаситель народа от зверств политической Науки, восстанавливает право наследования госвласти дворянами.
Евангелисты уничтожали царизм, частную собственность для перехода всей собственности в стране к классу дворян-госфеодалов в форме госсобственности.
Акт-1: религию объявили врагом «вооруженного рабочего класса». 1917-1918г евангелисты уничтожили царизм, расстреляли 30000 царских офицеров, прикрываясь научным атеизмом убили 50 млн идеологических конкурентов Евангелия.
Акт-2: в пролитых океанах крови обвинили политическую Науку, внушая обществу необходимость запрета вмешательства Науки в управление государством. Акт-2 начали генсек Андропов, его ставленник Горбачев: религия стала госидеологией. Испуганные территориальными потерями России из-за евангелистов, вернулись к полной Библии.
Дворян-оппонентов Плана с 1918г по Евангелию – Бог жертвует сыном – объявили враждебным классом приносимым в жертву алтарю революции. Принудили дворян скрывать дворянское происхождение, помогать революции. Дворяне стали госфеодалами СССР. Госфеодал – носитель наследственного права госвласти, охраняющий госсобственность на всё в стране.
Ленин не знал План – боялись выдаст как Троцкий, убитый за выдачу обществу скрытых целей евангелистов. За увлечение Наукой Ленина отравили антиарином, увековечили гранитной пирамидой фараона Ленина в Москве как публичного козла отпущения за 50 млн человек убитых евгеникой Евангелия.
Толстой по Евангелию реабилитировал чиновников-евангелистов лозунгом «непротивление Злу насилием» для народа-раба: Зло – часть государства по христианскому принципу изначальной виновности человека – нехороших госчиновников и без насилия народа принесут в жертву алтарю революции (для отвода вины с чиновников-евангелистов).
Фундамент непротивления злу насилием – однопартийное государство. Образ «непротивления злу насилием» – Пьер Безухов (Война и мир) – эталон гражданина (глупого, трусливого) по Плану евангелистов.
Для ликвидации экономических, идеологических конкурентов класс силовиков будет тысячелетиями прокручивать План евангелистов из двух актов – силовики как самый темпераментный класс размножаются быстрее народа – революции каждые 120-150лет от претензий на власть размножившихся силовиков.
Класс силовиков монотеистических стран добиваясь единых правил игры для всех профессий (невозможно), усиливает классовую борьбу. Государство всё делит на узкие темы, ставя в каждую ответственного, опасающегося тронуть тему другого ответственного – обиды, интриги в которых побеждают личные связи, не интеллект. Жизненная энергия уходит на личные связи, на остальное энергии нет.
Усложнение структур государства по эталону Коммунизм – распределение всех материальных, информационных благ сверху по образу и подобию Божьего царства. Распределяет не рынок, а Бог-чиновник сверху, лишая работы, доходов, прав и свобод оппонентов Евангелия.
1929г - начало военной подготовки Мировой революции.
1941г строили в Москве символ Мировой революции Дворец Советов, где планировали кинохроникой запечатлеть принятие в СССР последнего на планете государства. Мероприятие должно было стать датой создания Мирового христианского правительства. Танковая армада СССР готовилась уничтожить частную собственность, предпринимательство в Европе, затем в всем мире.
1992г: идею Мировой революции подхватили христианские фундаменталисты США (ПАРТИЯ-1). Они создав исламский терроризм миллионами убивали (евгеника Евангелия) идеологических конкурентов Евангелия.
Госмеханизм смены вырождающихся правящих кланов неравномерен. Частный механизм смены кланов – рынок – неравномерен. Действия обоих механизмов смены кланов по временным фазам противоположны – объединить в единый механизм для плавности процесса.
Персонализация инициативы накаляет ситуацию, единый механизм смены кланов должен быть деперсонализован, действовать на основе общих принципов, законов, кодекса чести. Кодекс чести должен осуждать человека, не желающего признавать право профессионально сильного против профессионально слабого. Признак профессионально сильного: превосходство в таланте, а не в количестве личных связей.
Христиане стараются зарождающиеся новые правящие кланы титульной нации экономически заменить на не претендующие в этом поколении на статус «правящий клан» кланы нетитульных наций. Они не претендуют в поколении-1, но не в поколении-3. Поколение-3: правящие кланы нетитульных наций, отбор которых шел по принципу минимума конкурентоспособности против старых правящих кланов. Государство строят с гнилых кирпичей.
Государство саморазрушается если процент (от населения) работающих силовиков, инженеров вышел за оптимальный диапазон. С 1991г агентов контрразведки на душу населения стало в 4 раза больше, что превратило субъекты Российской федерации в трудноуправляемые с Центра княжества на основе акционерной собственности местных контрразведчиков в местных предприятиях. Это разрушает вертикаль власти.
У идеологии Христа (ПАРТИЯ-1) нет национальной компоненты из-за социального равенства рабов по учебнику рабовладельцев Евангелие. Социальным равенством сильнее всего подавляют представителей неправящих кланов титульной нации, увеличивая среди силовиков процент нетитульных (титульные морально не готовы давить своих) наций.
Нацменьшинства агрессивнее против гражданского общества. Это ценят – процент нацменьшинств в спецслужбах растет, как рос процент варваров в Армии Древнего Рима перед его падением. Титульная нация футболит ответственность за свои решения на малые нации. Малым нациям выгодно отфутболить ответственность на крупную нетитульную нацию. Пусть бьется с титульной, усиливая малые нации.
Заставить титульную нацию отвечать за решения не прячась за других – появится потребность отказа от Евангелия. Евангелие разрушает государства постоянным госрегулированием жизни граждан с целью роста финансирования, численности силовиков.
Ограничить использование нетитульного языка в Интернете через ослабление спонсорства сайтов на нетитульном языке. Детям в школе объяснять: невозможно одновременно соблюсти права наций и права человека. Права человека затрагивают все население, права нацменьшинств только небольшую часть населения государства. Права гражданина имеют приоритет над правами нацменьшинств. Кто усиливает, поддерживает различия в культуре народов – разрушает экономику.
Организованность – способность населения без государства бесконфликтно решать задачи гражданского общества, включая вопросы защиты частного бизнеса от идеологического бандитизма государства.
Коллективистам (ПАРТИЯ-1) нужна бедная неравноправная нация: богатая нация купит средства производства, станет организованной. Организованными классами могут быть только классы имеющие средства производства, доступ к рынку сырья, информации; сбыт своей продукции, услуг на рынке.
Самый неорганизованные классы общества – рабочий класс, класс ученых. Это классы-марионетки: угроза голода, холода, нет собственности на средства производства. Нация из наемных работников без права собственности на средства производства – нация рабов – не может быть организованной в созидании.
Христиане натравливают рабскую часть общества на пытающихся выйти с рабства, как в 1930-х контрразведка натравливала людей против фермеров (кулаков), единоличников чтоб уничтожить частную собственность по идеологии Христа. Контрразведка убила голодомором миллионы единоличников в самых богатых на урожаи областях страны – всю еду у единоличников отняла Армия социалистической гадины СССР по приказу идеологических силовиков.
От крайностей социального равенства закон маятника ведет к противоположной крайности – крайний национализм. Евангелие как культ самоубийства (христиане поклоняются второму пришествию Христа – Христос физически убьет всё человечество за грехи) человечества словами о всемирной катастрофе подталкивает христианских силовиков раскачивать маятники политических крайностей.
У государства нет права на госидеологию. Гражданский долг не включает выполнение госидеологии. Государство может чего-то добиваться от гражданского общества только официальными законами чтоб гражданское общество могло юридически опротестовать преступный закон.
Опротестовать госидеологию невозможно – это зарплата 3 млн идеологических силовиков. Чем преступнее госидеология – тем больше финансирование контрразведчиков госбюджетом и агентурным рэкетом, агрессивнее классовые интересы.
Если христианам государство кажется неуправляемым (не идут цели Евангелия) – делают граждан беднее – саботаж граждан, управляемость государства падает. Христиане всё делают наоборот – запретить им госвласть. Государство окостенело от десятков тысяч секретных инструкций от Библии – управлять государством по логике и здравому смыслу не дает госидеология. Управлять государством должны открытая официальная Наука (изучаемая в открытых вузах), рынок.
Для защиты от госидеологии гражданскому обществу нужны независимые от зарубежья негосударственные организации занимающиеся в СМИ научным анализом действий госслужб
79) ДВОРЯНЕ-2
Идиот Ленин запретил частную собственность, предпринимательство – у граждан пропало желание работать. Стало выгоднее бомжами рыться в мусорных баках в поисках еды, воровать и грабить, стать мошенниками, аферистами. Поняв что он идиот, Ленин продолжил свою логику идиота – насильно как рабов загонял граждан на работу, отправляя в концлагеря за опоздание на работу: декрет Ленина от 5 сентября 1918г о создании по всей стране концлагерей. В концлагерях много людей умерло от эпидемий.
Коммунистические революции в Франции, Венгрии, Германии и России устроили дворяне-силовики – дети обедневших от быстрого размножения христиан-феодалов, которые по идеологии учебника коммунистов Евангелия ненавидели быстро обогащавшихся талантливых предпринимателей (капиталисты, буржуи), получивших благодаря своему богатству преимущественный доступ к лучшим самкам.
Дворяне как дети феодалов, привыкшие к праву первой ночи, возмущены переходом лучших самок от класса феодалов к классу предпринимателей. Считавшие себя до этого секс-гигантами, дворяне получили тяжелую душевную травму. Особенно польский дворянин Феликс Дзержинский. Исторически дворяне обречены – не могут дворяне платить государству столько налогов, сколько платят предприниматели.
Коммунистический бой дворян за лучших самок привел к гибели сотен миллионов человек в всем мире. В СССР дворяне стали на 70 лет госфеодалами (партийные боссы, правящие кланы силовиков, председатели колхозов) – Золотая эпоха для дворян. Сегодня дворяне в правящих кланах силовиков, мечтают вернуть назад Золотую эпоху или вернуть назад Средневековье, когда у феодалов было право первой ночи, все лучшие самки были у феодалов.
Дворянин Ленин убил 13 миллионов граждан, Сталин убил 11 миллионов граждан по подсчетам грузинской интеллигенции (журнал «Литературная Грузия» 1987г). Ленин и Сталин убивали миллионы граждан по мотивам ненависти к предпринимателям, возведенной дворянами-силовиками на уровень госидеологии, что привело к экономическому краху государства в 1991г, к потере 34% населения России в 1918г, к потере больше половины населения государства Россия в 1991-1992г.
Рэкетиры убивают членов семьи предпринимателей или отрезают им пальцы чтоб вытрясать деньги с предпринимателей. Вытрясавший преступлениями деньги с азербайджанских и грузинских предпринимателей рэкетир Сталин, видимо чтоб не сойти с ума от мук совести, испытывал зоологическую ненависть к предпринимателям и их богатству.
Став как агент царской контрразведки Главным силовиком страны, Сталин классовую ненависть социалистических силовиков к предпринимателям и их богатству, довел до уровня общегосударственной катастрофы для гражданского общества. Ненависть Сталина (недоучившийся священник Сталин косил под бомжа-коммуниста Иисуса Христа) к предпринимателям и их богатству, массово убивала граждан в сталинских газовых камерах (были до Великой отечественной войны), массовым голодом и другим массовым гостеррором против граждан, которые защищали право каждого человека на предпринимательство и частную собственность.
Каждый гражданин имеет право своей частной фирмой по госзаказу делать ядерные ракеты, атомные подлодки и если понадобится галактические крейсеры класса «Звезда смерти». Большинство ядерных боеголовок, ракет в 20 веке сделали частные предприятия. Частные предприятия делают любые товары дешевле и качественней, чем госпредприятия. Министерствам обороны любых стран выгоднее покупать по конкурсу военную технику у отечественный частных предприятий, а не у госпредприятий за гораздо большую цену, с меньшим качеством.
Не Сталин создал промышленность СССР: большую часть промышленности СССР создали американские частные фирмы в 1930-х за деньги госбюджета СССР. Дали бы эти деньги по конкурсу частным предприятиям – провели бы индустриализацию страны гораздо быстрее, с большим качеством. Индустриализацию России вызвали силовики Германии, готовившие Третий райх. Генералы СССР под влиянием силовиков Германии, захотели вернуть потерянные из-за идиота Ленина территории вместе с их населением.
Как определить идиотов вроде Ленина, Сталина? Очень просто! Все идиоты всегда за госидеологию – «сверхценные идеи» на которых помешались силовики, возведя их на уровень Уголовного кодекса. Статьи-13-14-15 Конституции России запрещают госидеологию. Государственные цели достигают законами и деньгами налогоплательщиков, а не госидеологиями
80)
ПРИНЦИПЫ УПРАВЛЕНИЯ ГОСУДАРСТВОМ: (статье вредило государство)
1. подчиненный моего подчиненного не мой подчиненный
2. профправа моего подчиненного не мои профправа
3. каждое конкретное профправо в данный момент времени принадлежит только одному работающему человеку системы (предприятия)
4. права человека выше прав наций, религий
5. у государства нет права вмешательства в отношения сторон без согласия одной из сторон. Список исключений минимален
Государством управляют через маньяков профессионального величия враждебных против профэгоизма, профдинастий, коррупции, превышения клановых интересов над государственными, общественными.
Управляемость государства строится на рыночных, консорциумных, вики-технологиях; на горизонтальной интеграции, на избегании крупных организаций с большим числом людей.
Вопросы нерешаемые адекватно государством, решит публичное интернет-обсуждение общественно-важных проблем. По результату закон проводит парламент. Модель управления государством, промышленностью – ядро Linux пишут 10000 программистов сети – армия менеджеров не нужна – решения принимают несколько влиятельных программистов
ЗАКОН-1 ЭВОЛЮЦИИ: эволюция максимально быстра при борьбе двух равных по величине противоположностей (список ограничений).
ЗАКОН-2 ЭВОЛЮЦИИ: эволюция как самолет: больше скорость – надежнее ход.
ЗАКОН-3 ЭВОЛЮЦИИ: трудноуправляемость системы компенсируют технологическим упрощением для ускорения обратной связи.
Класс силовиков поддерживает повышенный уровень преступности, конфликтности в обществе через бесплатное образование в профессиях управления, учета, контроля, распределения. Больше преступлений, конфликтов – влиятельнее класс силовиков. Силовики не заинтересованы в бесплатном образовании создателей, инженеров – это уменьшает уровень конфликтности в обществе.
Силовики скрыто усиливают преступность на планете для усиления своего влияния. Дать им раздуть свое влияние Мировым правительством – превратить планету в бурлящий котел террора, преступности, ненависти общества к государству.
Чтоб силовым структурам государств стал невыгоден рост преступности, насилия, террора на планете – нужна деиерархизация силовых структур. Государством должны править принципы юридического, профессионального равноправия (не путать с равенством) граждан.
Нужно решать проблемы государства устраняя их причины. Инженеры по идеологии ТРИЗ не усиливают контроль, а уменьшают причины потребности контроля.
Наследственное право госвласти разрушает государство – заменить научными принципами отбора персонала. Государство начиная с школы должно разъяснять гражданам опасность наследственного права госвласти, опасность профэгоизма, опасность госидеологии и вторжения религии в государственные институты.
У государства нет права на госидеологию как карательный механизм против граждан, достаточно УК. Какая госидеология нужна классу силовиков догадаться нетрудно: силовикам права рабовладельцев, гражданское общество – рабы.
Демократия – система защиты гражданина, его бизнеса, семьи, земли под домом и предприятием от самой опасной угрозы – от государства. Надо отделить государство от распределения рабочих мест не связанных с госвластью.
Коллективизация средств производства увеличивает число людей недовольных концентрацией управления средствами производства у небольшого числа менеджеров по профессионально спорным признакам их отбора.
Политическое противостояние в государстве из-за коллективизации собственности: мал процент людей распоряжающихся используемыми ими средствами производства. Чем больше граждан занято своими средствами производства – тем больше дисциплинированность, организованность гражданского общества, меньше вероятность претензий граждан на госвласть.
Надо создать международные принципы выявления признаков классового эгоизма. Классовый эгоизм и системная логика в государстве несовместимы: любое одно уничтожает другое.
В Черном списке профессий Госкибернетики профессии связанные с госвластью. Представитель не правящих сообществ государства получает власть при профпревосходстве над конкурентами, когда конкурентов из правящих сообществ на рабочее место < 4-10 человек.
В кризисе и войне вероятность получения госвласти растет для не правящих сообществ государства по переменным коэффициентам государственной формулы вероятности получения госвласти. В определенном Госкибернетикой списке случаев власть по жребию. Срок госвласти по госжребию не устраивает правящие сообществ государства – голосованием компромиссный срок.
Менталитет силовика: карательный уклон решений, ликвидация угроз разрушением личности их носителей. Менталитет инженера: объекты окружающей среды это ветви дерева эволюции – поддерживаются ветви ведущие к совершенству.
Правящие кланы размножаются быстрее остального населения в любом государстве. Наследование госвласти превращает часть детей правящих кланов в врагов государства. Они не получив госвласть ищут союзников за рубежом. Надо им вместо госвласти семейную частную собственность или бизнес чтоб не было революций, госпереворотов.
С 2000г заключенных Евросоюза стало меньше на 21%, пропорционально снижалась численность, финансирование силовиков. Поэтому силовики Евросоюза международным бандитизмом (Ливия, Ирак, Сирия… Убиты 1 млн человек) загнали арабов в Евросоюз.
Больше преступлений арабов в Евросоюзе – больше ФИНАНСИРОВАНИЕ (удалило государство) силовиков Евросоюза, больше прав накачают силовики против гражданского общества. Евросоюз уничтожает институт семьи – чем больше граждан ненавидит своё государство, тем больше ФИНАНСИРОВАНИЕ (удалило государство) контрразведки.
Евгеника Евангелия достигла идеала у католиков Чехии: за изнасилование после отсидки тюремного срока мужчин кастрируют. В трех штатах США тоже кастрируют. Евгеника Евангелия увеличивает число госфункций: ювенальная юстиция, отношения мужчина–женщина… Мужчин от женщин отпугивают лишние законы регулирования государством отношений мужчина–женщина, удушающие психику человека, превращающие его в загнанное животное не желающее продолжать род
81) С 1923г в Украине контрразведка проводила Коренизацию: замена школ на русском языке, школами на украинском языке (разделяй и властвуй). 1920-е: Воронежскую область присоединили к Украине, школы перевели на украинский язык – через год все двоечники – область вернули России.
Коренизацию контрразведка десятилетиями проводила в России против претендующих личным талантом на должности в госвласти и экономике – незаменимых нет – социальное равенство.
Сопротивление Коренизации с 1920-х оказали инженеры – мало технических терминов в нерусских языках. Класс инженеров к 1945г уничтожил Коренизацию. Человек с ручным пулеметом заменяет 15 человек с винтовкой. Железо на на полях сражений эффективнее, дешевле человека, размножается тысячи раз быстрее.
Для роста своего финансирования контрразведка в 1970г отменила секретную инструкцию запрещающую украинским националистам идти в органы власти Украины. 1971г это заметили русские в Украине.
Для роста своего финансирования контрразведка занималась «военной», «экономической» безопасностью государства, как диверсант блокируя переход технологий с военной промышленности в гражданскую.
Сверхузкой специализацией, высшей математизацией образования контразведка разрушила систему отбора инженеров. Заменили немногочисленных талантливых честолюбивых универсальных инженеров-интуитивистов на узких специалистов.
Тонущая от неконкурентоспособности промышленность потянула на дно (материалы, комплектующие) военную промышленность. От избытка инженеров, менеджеров, экономистов, финансистов себестоимость продукции госпредприятий по металлообработке 6 раз больше чем у частных фирм при равных условиях; по производству равноценных компьютерных микросхем, датчиков в 20 раз больше.
В 1970-х для конкуренции с США автоматизация, роботизация стали важнее человеко-часов рабочих: СССР восполнит потери военной техники в войне медленнее США. В 1940-е военная техника США размножалась 1,5 раза быстрее японской.
В автоматизации, робототехнике главное человеческий фактор – его уничтожает социальным равенством контрразведка. Инженеру христианское государство внушает: ты не Создатель, ты раб, обязанным тебе государство не будет! Человек всегда обязан государству! Государство не обязано человеку! Государство станет обязанным человеку – убьёт его: Королев, Янгель, Бабакин, Виктор Макеев…
Лозунги контрразведчиков христианских стран:
1. кто не с нами, тот против нас
2. эволюция – угроза государству
3. лучшее враг хорошего
4. слишком хорошо нехорошо
5. талантливый человек талантлив во всем. Талантливых людей принуждают забыть о своей любимой профессии, заняться другим. Человек талантлив только в том, от чего получает яркие положительные эмоции.
Преступная заповедь-2 Библии организует агентурный гостеррор контрразведки против талантов.
Перестройку-революцию устроила фракция Политбюро, не КГБ. Средние, нижние ступени вертикали власти неадекватны из-за профотбора по Евангелию: никакой логики, тупой догматизм. Этот тип людей размножают спецслужбы строительством мечетей, церквей. Христиане уменьшают процент населения, имеющий возможность претендовать талантом на влиятельные должности навязыванием обществу монотеистских религий.
Кланы силовиков делят не собственность, а право кланов на политический раздел экономики государства. Нет смысла делить собственность: отнимет власть. Политический раздел экономики обеспечивает защиту правящими кланами доли собственности в экономике от других правящих кланов. Правящие кланы силовиков стремятся сохранить долю без национализации через лобби корпораций в парламенте.
В силовые структуры идут садомазохисты (кого били в школе), садисты (кто их бил). От этого нарушениями прав человека, избыточным насилием против личности силовики лишают граждан лояльности государству. В конкуренции с другими классами силовики выбирают вариант максимального насилия чтоб гарантированно победили силовики – доказано в 1917г революцией в России.
Государство не Создатель, а заказчик услуг за деньги налогоплательщика. Создатель – рабочий класс, класс инженеров, класс предпринимателей… Силовик не создает конкурентоспособное, это функция Создателя (инженера). Идеальный генотип Создателя по половине качеств личности противоположен генотипу Силовика: разная реакция – разный результат.
Класс менеджеров – могильщик класса предпринимателей. Социализм – власть коллективистов против единоличников.
Экономический крах СССР разделил на красных, белых с скрытой гражданской войной между ними. США шантажировало белых (Ельцин) помощью красным.
От 7% до 12% заключенных в тюрьмах России – начинающие контрразведчики – учатся бытовым террором подавлять народ не выполняющий цели Христа.
Человек лоялен государству настолько, насколько государство лояльно к его правам. Оценка человека не связана с оценкой его предков, если он пресекает вмешательство предков. Равноправие – это возможность любого законопослушного гражданина превратить в деньги и славу свое генетическое превосходство над конкурентами
82) (статье 5 раз вредили) 1930г: русский инженер-химик Владимир Ипатьев в США создал технологию изопропилбензола, дав американским, английским военным самолетам авиабензин октановым числом 130, мощность на 15% больше немецких, российских военных самолетов.
Триптан (триметилбутан: получен 1922г): октановое число 300, рост мощности мотора на 50%, производила фирма Shell после войны до газотурбинных авиамоторов.
Ежегодный выпуск военной техники Германией вырос в 3 раза когда 1943г министр вооружений Германии Альберт Шпеер за выпуск оружия заставил отвечать не военных, а инженеров.
Райх-3 по наступательному человеческому потенциалу на 90% маленькая (70млн.чел. СССР 150) Германия у которой после Мировой войны-1 отняли материально-техническую базу. На содержание оккупированных территорий с неассимилированным населением Германия тратила человеческие, производственные ресурсы, чего не было до 1944г у СССР.
У СССР нефти много. Солярку, бензин Германия синтезировала с угля: 10 раз дороже. От неспособности социалистической экономики быстро нарастить (на уровне частных фирм) производство СССР получал от США много станков, алюминия, тушенки, военной техники… Германия получала бомбы сверху.
Когда разбомбили заводы Германии, частные лесные (в избах с печью) сельские заводики Германии обеспечили ей в 1943-44г удвоение производства военных самолетов. Госпредприятия СССР восстановили предвоенное количество производства военных самолетов только через 3 года.
Не разбомбили бы США, Англия заводы Германии, не поставили сотни тысяч тонн алюминия, еды, ресурсов, информации – СССР не выиграл бы войну. СССР вел войну на 1 фронт с союзниками, Германия на 2 фронта без пользы от союзников.
Германские подлодки не вели войну против флота СССР. Проникшая в Европу информация о запрете коммунистами частной собственности с их Планом сделать это в всем мире меняла соотношение сил против СССР – кончилось бы уничтожением СССР антикоммунистическим союзом стран.
5 революций, сокращение в разы населения, сокращение территории империи из-за курса России на экономическую диктатуру силовиков.
В Японии средства производства более индивидуализированы по собственности: в автомобилях > 50% добавленной собственности создают небольшие частные фирмы в десятки человек. Децентрализация промышленности сделала ее менее чувствительной к бомбардировкам в Мировой войне-2.
В России укрупнение, централизации предприятий привело к катастрофе: разбомбили алюминиевый завод: Россия 3 года строила самолеты с фанеры. Спасли поставки Америкой 400000т алюминия
83)
СПОРТУ НУЖЕН ДОПИНГ
Христиане превращают спорт в поклонение культу физического труда, уничтожая интеллектуальную компоненту, изобретательность спортсменов, сводя всё к чисто обезьяньим качествам силе, выносливости.
Надо законом защитить право спортсмена на защиту от лишнего труда, право на защиту от антидопинговых силовиков которые загоняют силовиков в рабство, запрещая спортсменам полезные для организма средства. У спортсменов среднего, высокого ранга должно быть подтвержденное Законом право регулировать интенсивность тренировки. Сегодня прав у спортсменов высокого класса как у заключенных в тюрьме
Нужна защита спорта от Евангелия:
1. презумпция невиновности для обвиняемого в нарушении правил
2. у правил нет обратной силы: правило действует только после его официального объявления, но не до этого времени
3. правила создают, подтверждают голосованием только активно действующие в чемпионатах мира или в Олимпийских играх спортсмены
4. судьи – только бывшие лучшие спортсмены
5. спортсмен имеет право на некоторые виды допинга. Стероиды, другие виды допинга необходимы для интеллектуальной компоненты: спортсмены сами конструируют своё тело. Препараты типа мельдония, которые уменьшают число микроинфарктов сердца спортсмена или оказывают пользу организму спортсмена, необходимы чтоб спорт не превращал спортсменов в инвалидов, взваливая проблему на налогоплательщиков. Из-за микроинфарктов (разрывы мелких кровеносных сосудов сердца) 50% сердца спортсмена к концу карьеры не работает от отмирания мышц после прекращения поступления крови. Запрещать надо только виды допинга разрушающие организм спортсмена и только в период участия спортсмена в соревновании. Спортсменам нужен доступ к допингу через контракт с врачом-специалистом по допингу. За нарушение контракта временно в черный список.
6. спортсмен имеет право отказа от услуг тренеров. Это уменьшит расходы налогоплательщиков на спорт
ОБЕЗЬЯНЬИ ЕДИНОБОРСТВА: христиане правилами сводят роль интеллекта к минимуму, роль примитивных обезьяньих качеств (сила, выносливость) к максимуму. В вольной борьбе христиане запрещали новые суперприемы, которыми их изобретатели малоизвестные борцы побеждали всех в чемпионате мира. Христиане запретом суперприемов уравнивали всем шансы по христианскому принципу социального равенства.
Смысл спорта не в уравнивании шансов (это лотерея – противоположность спорту), а точно найти самых сильных спортсменов, воздать им честь за превосходство. Самбо: запрет удушающих приемов свёл всё к силе, выносливости обезьян.
Введение христианами мягких перчаток, мягких шлемов в боксе ослабило позиции интеллектуалов: рассчитывали на нокаут в первых 5 раундах ринга. Дальше время работает на выносливость.
Единоборства Юго-восточной Азии самые интеллектуальные, самые демократичные. В них интеллект, быстрота, хорошая ориентация в пространстве, другие личные качества компенсируют нехватку силы, выносливости
84) Десятилетиями контрразведка агентурным террором, вредительством добивается от меня прекратить любить технику, профессию изобретателя, начать любить природу (экологию), рыбалку, водку; выполнять цели Христа. Свое творчество изобретателя я посвящаю тем кто сжигает леса, убивает животных, уничтожает природу христианских стран.
Если христианская страна принуждает гражданина любить природу (экологию) чтоб отвлечь от законной цели его генетической программы – гражданин получает моральное право сжигать леса, убивать животных, уничтожать природу этого государства.
У человека есть право на защиту от Заповеди-2 Библии: нельзя никого и ничего любить кроме природы. Граждане имеют право защищать свою генетическую программу от Евангелия политической революцией.
Мы изобретатели, инженеры вернем наш контроль над мировой промышленностью (был 19 веке – отняли христиане) через уничтожение природы, её замену техническими системи. Все ключевые, стратегические вопросы промышленности должны решать инженеры, а не силовики, менеджеры.
Если то что класс силовиков записывает в сознание человека противоположно его генетической программе, человек становится серийным убийцей, преступником, ходячей бомбой замедленного действия. Его подсознание, генетическая программа оценили гражданское общество, государство как врага. Они десятилетиями совершенно обычные люди. Затем внезапно берут в руки оружие, убивают максимум граждан ненавистного им государства, силовые структуры которого десятилетиями убивали их законную генетическую программу.
Класс силовиков христианских стран вбивает агентурой в головы своих идеологических врагов – Создателей (инженеров, предпринимателей) – информацию противоположную генетической программе человека. Чтоб сделать врагом гражданского общества, преступником, ходячей бомбой замедленного действия и изобразить класс силовиков Спасителем общества. Христос – символ класса силовиков играющего роль Спасителя общества от хаоса.
Генетические цели человека – информация об уровневом списке эмоций испытываемых его родителями при зачатии. С момента приобретения сознания человек живет так, что бы ежедневно испытывать эмоции соответствующие уровневому списку эмоций генетической программы.
В списке уровень отдельной эмоции равен уровню твердости человека в защите от религии, от общества, от государства личного права чувствовать эту отдельную эмоцию, служить ей.
Если эмоция созидательна для общества, но религия, общество, государство ее подавляют – в человеке формируется усиливающее его чувство морального превосходства, скрытая ненависть к враждебным к его генетической программе религии, государству, обществу.
Пример: ожесточенное сопротивление ~50млн человек России – с 1917г защищались от стремления христиан заставить человека жить по экономической программе Иисуса Христа (Коммунизм).
Евангелие создает человека считающего своими только права животного, всю жизнь безропотно переносящий умышленно устраиваемые классом силовиков бесконечные дикие авралы на работе, проблемы с жильем (для кастрации интеллекта раба трудом, стрессом). Без спокойного без усталости, сытого уединенного размышления в закрытом от людей помещении нет эволюции интеллекта человека.
В 1940-е миллионы россиян взбешенных антигуманистической идеологией СССР перешли на сторону оккупантов чтоб дети, внуки жили не по АНТИСОЗДАТЕЛЬСКИМ (слово 7 раз удалили) законам коммунистов. Россияне убивали других россиян. Защищающаяся страна потеряла людей в разы больше нападающей страны. Длительное существование государства по учебнику коммунистов Евангелие невозможно: люди убегут из страны – неизбежна идея Мирового христианского правительства чтоб люди не убежали и в попытке его создать ядерное самоуничтожение человечества.
Идеал христианских силовиков: государство – монопольная бизнес-корпорация типа СССР. С 1992г США начало создавать Мировое христианское правительство по образу СССР.
Слова Библии «неисповедимы пути Господа» – запрет обратной связи госвласти с рабами (гражданское общество). Принципы Евангелия конкурируют между собой: неизвестно какой принцип станет сильнее в меняющейся ситуации
85)
АВТОБИОГРАФИЯ
Я Томас Ахмедович Эдисон (по паспорту), национальность лакец – представитель нации предателей, нации чекистских сук десятилетиями уничтожавшей мои модели техники, убившей мои изобретательские фирмы, требовавших от меня отказа от профессии инженера, блокировавших мне единоличнику эмиграцию с страны коллективистов.
Я родился 13.08.1961г в день появления Берлинской стены. Берлинская Стена 1961г, Корейская Стена 1953г разделили планету на смертельную для народного (личного, семейного) бизнеса территорию христианской чумы – Социализма и остальное человечество. Мои 4 изобретательские фирмы, 107 моделей техники уничтожены этой христианской Чумой.
Я чемпион мира по изобретательству, конструированию, искусственному интеллекту, технической физике, топливной химии и техническому предпринимательству в правовом государстве. По конструированию, изобретательству и искусственному интеллекту порву сборную мира.
За счет изобретенных мною приемов я был чемпионом среди юношей по вольной борьбе в спортшколе «Урожай» (700-800 борцов) 1977г в Махачкале на родине вольной борьбы. Самостоятельно занимаюсь муай тай. Имею больше 1000 незапатентованных, 5 запатентованных изобретений (патенты на изобретения: 2159501RU – следящий привод; 2168640RU – двигателя внутреннего сгорания охлаждение по открытому циклу Брайтона; 2170372RU – композитный шатун двигателя; 2171184RU – активный стабилизатор поперечной устойчивости автомобиля; 2263814RU – бесшумная турбина). Могу делать 7 изобретений в день.
Я химик (химические изобретения), универсальный технический физик. Могу решать быстро физико-технические, инженерные проблемы, которые никто не смог решить. Рисунки, чертежи, фотографии этого сайта сделаны мною. Здоров, вынослив, быстр, достаточно силен чтоб порвать парней ставших на моем пути Изобретателя, Инженера, Алгоритмиста. Я гетеросексуал (натурал). Как идеальный карьерист никогда не пил, не курил, не принимал наркотики. Не имею семьи, ищу рабочее место конструктора-изобретателя.
Работаю в машиностроительных заводах с 1977г начиная с стажировки токаря в заводе сепараторов. Работал в Инструментальном цехе заточником фрез, шлифовщиком. Работал токарем, резчиком, сварщиком, электриком (3-фазный ток), лифтером, стропальщиком, маляром, слесарем ремонта велосипедов любых марок.
Работал на 7 заводах авиационного, автомобильного, судостроительного, электротехнического профиля на 55 разных станках. На некоторых станках лично изготовил, внедрил рацпредложения в 3-4 раза уменьшающие труд, 2-4 раза увеличил производительность.
Сегодня я работаю уборщиком (удалили 3 раза) на заводе.
Профессия изобретателя запрещена Евангелием, его запретом профессионально-генетической конкуренции Создателей. Управляемость государства прямо пропорционально уважению власти к праву человека на профессионально-генетическую конкуренцию. Нет этого права: у талантов, гениев нет права карьеры + скрытый террор власти против интеллигенции, дебилизация страны с падением её управляемости.
Символ универсального профессионального превосходства человека – дракон: летает как орел, силен как тигр, бронирован чешуей как броненосец. В флаге и гербах России антисуперменский символ – символ борьбы государства против суперменов-Создателей (профессиональные богатыри) – козлик Жорик убивающий дракона копьем в пасть чтоб не вякал про право человека-Создателя на профконкуренцию.
Запрет превосходства человека над другими людьми – христианское социальное равенство. Интеллектуальные рабочие места запрещены талантам из народа – только детям правящих кланов силовиков.
1967г: радиолюбитель до появления в России цветного телевидения опубликовал в журнале «Радио» статью с схемами изготовленного им работающего цветного проекционного телевизора повышенной четкости. 560 реальных вертикальных линий против 360 линий (сам мерил 1985г) у телевизоров госпредприятий.
Класс силовиков за посягательство частника на унаследованный от Евангелия титул государства как монопольного Создателя всего, вдвое уменьшил размер журнала «Радио». Начиная с номера про этот телевизор. В 1980-х силовики опять уменьшили размер журнала «Радио», на 35% уменьшили размер журнала «Юный техник» за посягательство на монополию Единого Создателя – государства.
В монополии убедился в Армии где все 2 года рассказывал всем о подавляющем превосходстве частных фирм против госпредприятий. До последнего дня моего рабства в Cевероморске в военной части в/ч 16539 (до 1981г в/ч 01914) класс силовиков терроризировал меня, не давал ни минуты личного времени в будние дни, ни одного часа личного времени в выходные дни бесконечной эксплуатацией, ежедневными профессионально организованными неуголовными, уголовными (для отправки в тюрьму) провокациями.
В последний день к дембилю провели очередную карательную операцию против меня для отправки меня в гаупвахту. Если бы не помощь литовца Андрекуса у меня были бы проблемы после проведенной врагами народа чекистскими суками Сейбулаевым, Бурмистровым (с Донбасса) операции против меня.
Минобороны 2 года запрещало мне в Армии после работы отдыхать, думать чтоб убить во мне изобретателя, инженера; не давало солдатам после 8ч работы отдыхать на кровати. Командиры объясняли тюремный режим: у солдата (раба) не может быть свободного времени.
Агентурный биохимический террор Минобороны применило против меня за неделю до дембиля в 1982г в Североморске, куда (Мурманск) вызвали чекистскую суку мою мать для принуждения её применять каждую неделю против меня спецхимию, что она делала десятилетиями, опрыскивая мою еду и напитки раствором спецхимии.
В 1983г после Армии мать отравила меня спецхимией в стакане чая, который она вложила в мои руки. У меня из-за чая с спецхимией прекратила работать часть моего мозга, через 2 часа я оказался в больнице. Подозреваю что часть моего мозга не работает из-за матери, отравившей меня по приказу государства за невыполнение госидеологии Евангелие. (синее 2 раза удалили)
Государство 40 лет применяет против меня 11 видов спецхимии (агентурный биохимический террор: опрыскивают раствором спецхимии еду, напитки): СПЕЦХИМИЯ ОТ КОТОРОЙ ЧЕЛОВЕК ВНЕШНЕ НЕЗАМЕТНО ТЕРЯЕТ КОНТРОЛЬ НАД СВОИМИ СЛОВАМИ И ДЕЙСТВИЯМИ (по действию напоминает скополамин)(фразу 3 раза удалили), спецхимия вызывающая сильное ухудшение поведения (злобность, агрессивность, не работают ограничители сознания), антиарин вызывающий 5 дней частичного паралича сердца (600 раз годами, инвалидность. Пик действия через 20мин. Действует по линейно падающему графику 5 дней. Вкус черного кофе), 2 недели синдрома хронической усталости (200 раз годами, инвалидность. Действует по линейно падающему графику), 18 ЧАСОВ СИНДРОМА ХРОНИЧЕСКОЙ УСТАЛОСТИ (пик действия через 30мин. Действует по линейно падающему графику(фразу 3 раза удалили). Спецхимию вызывающую резкие боли в костях таза и позвоночнике (200 раз годами, инвалидность. Срок действия 5 дней по линейно-падающему графику), ухудшение работы легких на 90% (50 раз инвалидность), разрушительные (частичная потеря индивидуальности, функций мозга) для мозга дозы предположительно инсулина (500 раз, годами инвалидность), спецхимию вызывающую сверхагрессивность (десятилетиями тысячи раз. Приравнивается к уголовной провокации. Это не адреналин: частота пульса, давление иногда невысокие), повышенную от спецхимии сексуальность (годами). Спецхимию вызывающую за 30мин суицидную депрессию на 4-6 часов (3 раза: 2 раза в Махачкале в 1993 и 1997г, 1 раз в Москве в 2006г. Действие 3 часа линейно растет, затем 3 часа линейно падает), спецхимию вызывающую инсульт (действует 90мин. 1 раз в Махачкале 1982г); другие виды спецхимии.
Личность человека исчезает под действием террористической спецхимии. Личность человека это тонкие балансы эмоций, целей, интересов. Спецхимия христиан меняя все балансы в человеке, сильно меняет к худшему личность и поведение человека, превращает его в глупую обезьяну с целью его дискредитации или получения повода применения жестких карательных мер за невыполнение госидеологии. Это уже совсем другой человек. Чекистская сука моя мать с периодичностью 1-12 дней постоянно с 1982г по 2001г применяла против меня спецхимию.
Применяли 6 раза против меня спецхимию сильно размягчающую межпозвонковый хрящевой диск, из-за чего он раздавливается полностью при нагрузке 25% от максимально возможной без последствий, несмотря на полную подготовку позвоночника к работе. Затем за 21 день уменьшающейся инвалидности вырастает новый хрящевой диск. Наиболее часто раствором спецхимии опрыскивают соль, сахар, напитки, соусы.
Новый способ инквизиции: есть случаи убийства предпринимателями-единоличниками своих семей. Жены-агентки добавляют в пищу своих супругов смесь 2-х образцов карательной спецхимии: химия вызывающая сверхагрессивность + химия вызывающая тяжелую депрессию.
После чего предприниматель убивает без всякой жалости всю свою семью или кто из его врагов ему подвернется. В течение 1,5ч после этой химии даже невинный человек будет убивать своих врагов, если его сознание не сможет в тяжелейшей внутренней борьбе пересилить силу химии.
В мировых СМИ по телевидению десятки раз показывали как разные люди в одиночку расстреливали десятки человек. В Уголовном кодексе должны быть статьи против заказчиков, исполнителей агентурного биохимического террора. Против меня несколько раз в Махачкале применили смесь этих 2-х образцов спецхимии. Надеялись выполнить евгенику Евангелия: я убью своих врагов: ссученную мать, ссученных братьев.
Я спасался от этой химии: уходил от дома на 2км и 1,5ч. Исполнительницу этого преступления мою мать не предупредили: это смертный приговор ей, сыновьям в идеологической борьбе христиан против единоличников.
Враг народа чекистская сука моя мать обратила внимание чекистов: люди уезжали за рубеж с золотыми зубами, возвращались без них. Она научила чекистов (христианских инквизиторов) сажать народ в тюрьму за свои же зубы. Да будет проклята враг народа чекистская сука моя мать, её нация предателей, нация врагов народа чекистских сук лакцев и моя Родина за пожизненные попытки убить во мне Создателя - Инженера (запрет государства на профессию инженера-конструктора)! Лакцы гавно Кавказа.
Всю мою жизнь с 8-летнего возраста государство непрерывно стремилось ухудшить мои умственные способности, убить во мне изобретателя, ухудшить моё поведение. Вначале для этого государство применяло агентурный физический террор в школе, затем агентурный биохимический террор. Государство не изменилось, осталось антиэволюционной антигуманистической империей вредителей под влиянием учебника террористов Евангелия.
Государство в 2003г ввело против патентных поверенных чудовищный налог (5 зарплат рабочего) за каждую прошедшую через их руки заявку на изобретение, заблокировало многим получение статуса патентного поверенного.
Я больше года собирал $840 на патент, полгода ел только объедки заводской столовой чтоб дать аванс ПАТЕНТНОМУ (удалили) поверенному при патентовании турбины. Могу делать 7 изобретений в день, нет денег на патентного поверенного
Принципы отбора работников внедряемые христианскими инквизиторами:
1. запрещены личная профессиональная цель, открытое стремление к профессиональному превосходству над всеми коллегами, над всеми людьми. Карьеризм – преступление
2. работник готов предать интересы государства, гражданского общества по требованиям работодателя: защита профэгоизма силовиков от МОРАЛЬНОГО (удалили) осуждения обществом
3. работник бойкотирует профессиональные, коммерческие контакты с лицами не выполняющими вредительские правила игры от вузов
Вузы главный рассадник профэгоизма, антиэволюционизма христианских инквизиторов. Я свидетель: полгода учился в Техническом университете Махачкалы. Цель современных вузов – не допустить появление рабочих мест универсальных ученых, инженеров. Тогда выяснится: все системы «датчики – система управления – рабочие органы» функционируют по единым законам эволюции. Одинаковым для автомобиля, самолета, ОБЩЕСТВА, ГОСУДАРСТВА (удалило государство)
Выделятся 2 главных эволюционных параметра: цена-качество, надежность (сверхживучесть). Выяснится: экология, безопасность государства упор делают на живучести систем. Для этого нужна децентрализация, деиерархизация функций, алгоритмов управления, деколлективизация профконкуренции, собственности, человеческой мысли, ответственности.
Христианские силовики чтоб увеличить свое финансирование и численность, превращают самых интеллектуальных граждан в врагов свого государства. Враг претендовать на рабочее место инженера не может: меньше конкуренции детям правящих кланов силовиков на рынке рабочих мест.
1969г я бутылочный бизнесмен 1960-х сдавал бутылки от пива за 10коп (пивная лавка 100м от дома), наладил бизнес. На капитал моей единоличной изобретательской фирмы 360коп купил из-за электромотора игрушечный корабль. Электромотор разгонял до хорошей скорости сделанную мною в 1971г проволочную модель автомобиля с батарейкой.
1970г я многократно говорил матери – я стану лучшим конструктором мира. Чекистская сука мать настучала об этом русской контрразведке – православной инквизиции. Инквизиция начала убивать мою гордыню заповедью-2 Библии: нельзя ничего любить – нельзя любить профессию конструктора – пожизненный запрет на профессию конструктор. 1970г началось пожизненное уничтожение моих моделей техники, продолжающееся в 21 веке.
С 1970г я непрерывно добиваюсь работы конструктора. Отказался из-за этого от семьи, от всего мешающего этой цели. 23 работодателей России отказали мне в рабочем месте конструктора.
С 1970г христиане агентурным террором пытаются заменить мои личные инженерные цели на цели идола силовиков коммуниста Христа. Мне класс силовиков России 3 раза не дал учиться в инженерном вузе, уничтожил мои 4 изобретательские фирмы, 107 моих моделей техники, включая демонстративное разбивание моей модели об асфальт работником прокуратуры.
1974г и 1980г государство уничтожило мои модели истребителей: ЯК-3, МИГ-21. Государство уничтожило 5 моих моделей самолетов.
1974г чекисты переселили мою семью с 2-комнатного дома с высоким потолком и двумя сараями в центре города возле Технического колледжа в центре Махачкалы (Нурадилова 51) в 1-комнатный полуразрушенный дом без воды, канализации с сверхнизким протекающим обваливающимся потолком, в том же городе в малонаселенной бандитской (3 раза удалили) местности горно-сельского типа у ж/д вокзала (4 раза удалили) на улице имени лейтенанта Шмидта 18. Мое место жительство маньяка изобретательства в 300м от ТЕХНИЧЕСКОГО (удалили) колледжа сочли угрозой для государства в связи с моим стремлением создать личную изобретательскую фирму.
1975г: выбор с 2 языков, заявил: буду работать переводчиком технических журналов на английском языке. В ответ запрет мне изучать английский язык под угрозой исключения из школы №4, хотя я был самым дисциплинированным в классе.
Чекистская сука моя мать поддержала запрет, заявив: так решили власти, придется подчиниться. Несколько дней, ежедневными агентурными операциями блокировали мои попытки отстоять право на выбор языка.
Чтоб исключить мое влияние единоличника на братьев государство в 1970-х через чекистскую суку отца отправило моих братьев в детдом делать из них христосов – лиц христианского менталитета. Моя мать чекистская сука вела 4-летний судебный процесс за возвращение детей в семью против чекистской суки отца. 4 года все Суды заканчивались подтверждением права государства отнять у матери ее детей.
Я, мать вместе украли моих младших братьев с детдома, проинструктировав как себя вести при нападении государства. Учитывая: в 1970г контрразведка зимой ночью закрыла кирпичами печную трубу для убийства моей матери, ее детей – мы дешево защитились от государства.
В ту ночь 1970г я в 2ч ночи две минуты будил находящуюся в бессознательном положении от угарного газа мать. Разбудил с вопросом: почему невозможно дышать? Мать бросилась открывать окна. Мы вытащили на улицу моих наполовину угоревших младших братьев. Мать сказала: печь. Проверил: задвижка печи в правильном положении. Залез на крышу увидел: на печной трубе плотно лежат сверху кирпичи. С 1970г после угроз мать стала марионеткой православной инквизиции КГБ.
Мать рассказами дала мне понять: были угрозы физического уничтожения её семьи, превращения её в рабыню инквизитора-садиста (произошло с её подругой), применения против неё насилия с тяжкими телесными повреждениями (на её глазах сломал нос её другой подруге начальник подруги), применения против неё спецхимии…
КГБ обеспокоенный нежеланием моей матери стать марионеткой-вредителем покусилось на убийство: в 1970г нашу семью убили бы, если бы я не проснулся ночью. Гостеррор сломал мою мать, сделал чекистской сукой.
С 1970г чекистская сука моя мать десятилетиями уничтожала по приказу государства мои модели автомобилей, самолетов, танков, поездов, ракет, кораблей, мотоциклов, экскаваторов. Контрразведка вырывала фотографии с иностранными автомобилями, мотоциклами с моих личных журналов. Инквизиторов борющихся с изобретателями в 1000 раз больше изобретателей.
Чтоб задушить мою изобретательскую деятельность в школе №4 мой класс в старших классах класс силовиков заставлял учиться 8ч в день. C 12ч до ~20.00ч (перенос литературы, математики на 2ч) + 4ч на домашние задания. Методом переноса уроков литературы, математики на 2ч. Государство нарушило свои законы ограничивающие эксплуатацию детей 6ч в день: 12ч в день эксплуатации, угнетения детей под угрозой запрета на профессию инженера. Государство трудом, школой, пионерлагерями убило мое детство, право на свободное развитие чтоб не изобретал, не занимался моделизмом.
1976г: я создавал технику с 8-летнего возраста с 1970г. 1970г изобрел применил новый композитный материал: 3D-армированный пластилин в автомоделях: кусок пластилина в объеме плотно обмотанный ниткой. Ему придавалась форма детали, которую композитный пластилин держал под нагрузкой тверже прочнее термоустойчивее обычного, весил меньше.
Дизайн моих моделей автомобилей с подвеской, с работающими рулевым механизмом, дверями, капотом я выполнял как композитную конструкцию с пластилина, ниток, проволоки, фольги. В ответ государство из-за меня 1976г секретной инструкцией запретило продавать пластилин в Махачкале с 1976г по 1978г чтоб я не делал модели автомобилей, самолётов с пластилина, ниток, проволоки. 3 года обходил весь город, не мог найти пластилин.
1976г государство ликвидировало все мои источники толстой фольги с которой делал модели автомобилей. Моей проволоки за несколько лет в Махачкале по приказу силовиков украли с под замка сотни килограммов, сломали лично мной построенные кирпичные стены, дверь подвала в котором от государства защищал свою проволоку для моделей.
Государство всю мою жизнь уничтожало мои личные инструменты, материалы, модели, станки. Убить в человеке Создателя, отнять все средства производства, загнать в рабство в госпредприятие – цель христиан. Меня всю жизнь христиане загоняли на угнетение ограбление в госпредприятия, полвека не давая ни создать свою фирму, ни эмигрировать для создания изобретательской фирмы.
1977г одноклассник Сергей Красюков по приказу КГБ добивался от меня чтоб прекратил создавать многофункциональные (все функции настоящего авто) модели автомобилей, перешёл на однофункциональные (скорость кордовой модели) модели. Для этого вредительства контрразведка через Красюкова пыталась мне бесплатно всучить дорогостоящую готовую кордовую (модель на тросе с подшипником на вкопанном столбе) модель автомобиля с поршневым двигателем.
Заявил Красюкову: пропаганда однофункциональных моделей автомобилей – преступление против народа-Создателя. Обществу нужны многофункциональная техника, многофункциональные инженеры. Узкие специалисты – паразиты-вредители на шее народа. Государство приказало тебе убивать многофункциональный моделизм?
Государство не имеет право убивать право человека на манию изобретательства, право на манию профессионального величия, право на инженерную честь (гордыню).
Борьба контрразведки против многофункциональности моделей продолжилась в 1980-х. У меня чекистские суки покупали созданные мной модели автомобилей, кусачками полностью вырезали все работающие проволочные механизмы модели, демонстративно заявляя мне – железки не нужны, нужна только видуха.
1977г я занял 1-е место в соревновании по вольной борьбе среди юношей. Соревнование в самой крупной в Дагестане спортшколе «Урожай», где вместе с мной занималось вольной борьбой 700-800 борцов. Через 3 дня участникам соревнования объявили: никаких грамот за призовые места не будет, было слишком мало борцов.
В следующих соревнованиях борцов было на 15-20% меньше, все занявшие призовые места получили грамоты. Я свидетель по обоим соревнованиям. Это единственный случай невыдачи грамот за ~8 соревнований, прошедших за 4 года, что я занимался борьбой. Контрразведка запретила давать грамоты чтоб я не использовал её для поступления в инженерный вуз.
Минобороны отказалось дать мне обещанную характеристику моей службы в Армии чтоб я не использовал её для поступления в инженерный вуз. Я был лучшим работником (неоднократно объявляли на собраниях роты, получил отпуск), один заменял 5 человек в ремонтном заводе УНР-19 в стройбате Североморска в 1980-1982г.
Каждые 4-7 месяцев спецслужбы клеветой на меня, провокациями и якобы заменой борцовского ковра добивались от меня чтоб ушел из спортшколы «Урожай».
В 1977г я победил в соревновании по вольной борьбы крупнейшей в Дагестане спортшколы вольной борьбы «Урожай» (4 раза удалили). Судьей в этом соревновании был 5-кратный чемпион мира. После этого я объявил знакомым о решении стать чемпионом мира по вольной борьбе в своем весе, т.к. мой мозг работает втрое быстрее любого борца спортшколы при большом потоке сложной информации. Планировал выехать на чемпионат мира, просить политического убежища от социализма.
Тюрьма народов заблокировала мое решение трудотерапией. Троюродный брат сегодня шестерка красного чекиста-олигарха Махачева. Красные чекисты-олигархи – заказчики терактов против офицеров Федеральных спецслужб. На их совести утренние взрывы домов скрытого, открытого проживания офицеров Федеральных спецслужб. Они в Дагестанском телевидении хвастались в 1990-е что тратят на 9-этажный дом не > 50кг взрывчатки: этому обучались в Москве 1970-х в Высшей школе КГБ.
Троюродный брат уговорил перейти к тренеру-А, 5-кратному чемпиону мира в вольной борьбе в легком весе. К нему шел лучший человеческий материал. Перешел. Тренер-А сразу по заказу КГБ применил против меня христианскую трудотерапию.
Предыдущий тренер Каримов давал настраиваться всю тренировку на 1 единственный прием, делить его на детали, отрабатывать детали приема отдельно на полном сопротивлении сильного партнера, думать, отдыхать по внутреннему голосу чтоб не выгореть.
Ссученный христианами тренер-А применил трудотерапию: за тренировку отрабатывали ~10 приемов без отдыха, настройки, деления приема на детали. Приемы выполнялись на количество в минуту чтоб вышибить мысли о детальной проработке. С тренировки тренер-А исключил мозг, эмоции настройки, детализацию приемов, отдых по внутреннему голосу, все свел секретной инструкцией к труду. Так ничего не отработать и за 100 лет.
Мои результаты 2 года шли вниз, прекратил тренировки: государство блокировало меня на всех фронтах моего интеллектуального, профессионального, генетического, спортивного превосходства над людьми.
Государство агентами в школе блокировало интеллектуальные споры одноклассников с мной чтоб я не доказал свое превосходство в интеллекте: в интеллектуальных спорах мог участвовать любой одноклассник кроме меня. Сейчас меня блокирует государство в технических форумах интернета без объяснения причин: контакты не отвечают на мои письма.
Родился бы я не в России – как чемпион мира по промышленному предпринимательству к сегодняшнему дню был бы богаче Илона Маска.
1978г доказывал – я чемпион мира по конструированию, усовершенствовал велосипед сделав самым быстрым односкоростным велосипедом города, самым процентно облегченным – сбросил 3кг веса велосипеда. Объявил всем: куплю гоночный велосипед, поставлю полугоночные колеса, изобретенные мною передние тормоза повышенной плавности работы, новый руль, увеличу до 10см диаметр всех цепных роликов переключателя передач для снижения трения шарниров цепи, сделаю велосипед самым быстрым, самым совершенным в мире велосипедом. Докажу – я чемпион мира по конструированию.
Из-за моего заявления – я чемпион мира по конструированию, 1978г секретная инструкция запретила продажу гоночных, полугоночных велосипедов в Махачкале. До этого годами каждые 3 месяца продавали гоночные велосипеды «Старт-шоссе» 106руб, полугоночные 120руб.
1978г: я одноклассникам и знакомым в 1978г говорил фразу «мне достаточно 10 лет чтоб доказать – я чемпион мира по конструированию». В ответ империя моральных людоедов в школе номер 4 города Махачкала посадила сзади меня агента-одноклассника Макаева Руслана с которым до этого никогда не было никаких отношений, конфликтов.
На следующий день после произносимой мной фразы «мне достаточно 10 лет чтоб доказать – я чемпион мира по конструированию» агент Макаев во время уроков с всей силы сзади бил кулаком в затылок (1-2 удара каждый час). Закончилось тем, что на следующий день после очередного удара я мгновенно с разворота воткнул ему ручку в лицо, проткнув кожу насквозь.
Через неделю на его место империя моральных людоедов посадила агента-одноклассника Поландова Игоря, одного из самых крупных одноклассников. С Поландовым до этого никогда не было никаких отношений, конфликтов. Каждый раз когда я одноклассникам и знакомым в 1978г говорил «мне достаточно 10 лет чтоб доказать – я чемпион мира по конструированию», на следующий день в время урока агент Поландов с всей силы наносил сзади удар в затылок (1-2 удара каждый час).
Государство давало понять, что не позволит гражданам как рабам государства заявлять о своем профессиональном превосходстве над всем миром. За это христиане по обвинению в гордыне агентурным гостеррором пожизненно морально ломают человека, принуждая признать себя рабом: рабы инструмент рабовладельца (класс силовиков в христианских странах) – у инструмента нет права считать себя лучше других – все рабы равны (социальное равенство рабов божьих).
Подобными эпизодами почти ежедневно заполнена с 1970г вся моя изобретательская жизнь прирожденного маньяка изобретательства, которому по заповеди-2 Библии христианское государство с 1970г запретило профессию инженера-конструктора.
Заповедь-2 Библии: нельзя никого и ничего любить – любовь запрещена – нельзя любить профессию инженера. По Заповеди-2 Библии христианские государства мстят (за любовь) человеку на 3 поколения включая детей, внуков.
1979-1980г основательно готовился к экзаменам в Московский автодорожный институт МАДИ. 1980г МАДИ нарушил 2 закона: отказав мне иногороднему в общежитии, не признал закон о красном дипломе: мой диплом с отличием и записью о примерном поведении с технического училища заменял экзамены собеседованием. Устроился в общежитии завода ЗИЛ у работавшего на ЗИЛ двоюродного брата Керима. Его младшая сестра доктор медицинских наук, главврач в Москве.
Обратил внимание на попытки государства натравить (ложные обвинения) Керима на меня. В МАДИ экзамен-1 математика сдал без проблем. Конкурс 2,5чел/место. Перед экзамен-2 Керим просил съесть перед экзаменом батон колбасы. Я отказывался 3мин. Он настаивал так словно от этого зависела его жизнь. Съел колбасу. Колбаса с слабительным оказалась операцией контрразведки против меня: в экзамене начался незнакомый мне по предыдущей жизни сильный внезапный понос: бросив экзамен бежал в туалет.
Государство шантажировало Керима секретным законом выселяющим человека (даже москвича) с его собственной квартиры или общежития, если иногородние родственники безвыездно из Москвы прожили > 15 дней. Я прожил больше: ежедневно читал научно-техническую литературу в расположенной в 4 минутах ходьбы публичной библиотеке у конечной станции трамвая + рядом публичная библиотека у метро Первомайская. Керим не хотел терять жилье, скормил мне колбасу с слабительным.
1979г с соседом-ровесником Валерой Ачакановым в 1970-х занимался автомоделизмом, танкомоделизмом. Валера специалист конструкторского стиля «жестянщик», я специалист стиля «проволочник», «композитчик». 1979г я с Валерой созданными нами автомоделями провели ралли. Его автомобиль победил. У моего проволочного автомобиля независимая двухрычажная подвеска + 4 кардана (шлицы тоже были) на задние колеса.
1980г соревнование моделей танков. Мой танк: много слоев фольги, фанеры, склеенных пластилином, быстро изготавливаемая проволочная гусеница с легким ходом. Фото гусеницы, проволочных механизмов: с.67-69 журнала «Юный техник» 5-2000г. Танк Валеры был легче, смотрелся лучше, полностью спаян с консервной жести, башня вращалась лучше, гусеницы из жести.
Я испытал танковую пушку с толстой фольги: затвор, снаряды (фольга + спичечная сера) с гильзой отводящей тепло, копоть; успешно испытал от батареи 4,5V электроподжиг снаряда вольфрамовой нитью лампы длиной 4мм. Разработал на бумаге автомат заряжания радиоуправляемой модели танка на двух концентричных спиральных проволочных направляющих башни: замкнутая проволочная роликовая снарядная цепь, досылатель снаряда в затвор, 2 электромотора.
Мы договорились в поколении-3 танков соединив его стиль «жестянщик» с моим стилем «проволочник» производить продавать копии совместно разработанного танка. Об этом донесла в контрразведку чекистская сука моя мать.
Меня забрали в Армию. 12 моих моделей: автомобили с действующим рулевым управлением, с независимой подвеской всех колес, с работающими дверцами, капотом, багажником, проволочный экскаватор с изобретенной мной грязезащитной, экономичной по расходу энергии кинематикой без мертвых точек, 2 модели танка с вращающимися в скатывании с горки гусеницами, 2 модели пушки разных затворов, автокран с работающей тросовой системой, другие модели по приказу контрразведки уничтожила с запасами моих материалов для моделизма моя мать.
Все модели, моя изобретательская фирма располагались под моей кроватью, никому не мешали. Это 2-е массовое уничтожение моих моделей, моей изобретательской фирмы моей матерью по приказу государства. До этого в 1974г все мои модели по приказу уничтожила моя мать. На протяжении десятков лет государство 5 раз массово уничтожило мои модели.
1980-1982г: в/ч 16539 (в/ч 01914 до 1981г) Североморска где я служил в стройбате попытка солдат поеданием объедков в столовой уклониться от борьбы христианского государства с ростом мозга через голод наказывали как преступление против государства.
В Армии командиры целенаправленно принуждали меня голодать, приказывая в столовой не давать мне кашу, пока не съем борщ (вода с капустой – 0 калорий), из-за чего оставался без каши (только чай), запрет оставаться в столовой. Солдаты терроризировавшие роту по секретным инструкциям командиров-чекистов, себе в тарелки ставили в разы больше еды, чем могли съесть, оставляя остальных солдат почти без еды (синее два раза удалили).
С казармы возвращался в столовую есть объедки – не дать государству уменьшить мой мозг: рабам запрещен интеллект. Объедки вместо голодающих солдат получали колхозные свиньи. Голод свиней важнее голода солдат.
Командиры нашли способ: меня за 2 года службы в разы больше остальных солдат отправили в наряд чтоб не дать моему мозгу развиваться, отдыхать – полночи стоять по стойке смирно у входа в казарму. В наряд отправляли под предлогом что я после работы или в выходные сидя на скамейке (на кровати сидеть до отбоя запрещено – карали ночным нарядом) закрывал глаза чтоб изобретать, включив воображение. Рабам закрывать глаза запрещено рабовладельческой по Евангелию стране.
Постоянно воровали мою подушку, из-за чего по ночам я в наряде стоял смирно у входа в казарму – отсутствие подушки преступление раба. В автозаводе ЗИЛ тоже запрещали закрывать глаза в время отдыха под угрозой увольнения – рабу запрещено закрывать глаза во время отдыха в неночное время. Рабство узаконили вводом в Конституцию рабовладельца Бога.
Ночью действующие вместе с командирами против меня дагестанцы выливали ведро воды на моё одеяло чтоб не дать спать. Днем во время обеда дагестанцы вместе с украинцами плевали мне в тарелку. На меня давили чекистские суки: дагестанские, украинские ссученные солдаты-враги народа чтоб перестал есть объедки.
Противостоял атакам ссученных врагов народа: дагестанцев, украинцев. Дагестанцы, украинцы, командиры заставляли нас защитников страны солдат голодать, чтоб уменьшить мозг, мускулатуру солдат. В ответ я силой моего интеллекта заставлю их нации и государства умирать от голода за уменьшение моего мозга, мускулатуры.
Многократные УГОЛОВНЫЕ (удалили) провокации (для отправки в тюрьму) провокаторов от Минобороны.
Я всегда готов резать головы дагестанцам которые со мной служили в Армии, за то что предались христианским нациям, помогали им голодом уменьшать мозги и мускулатуру солдат из нехристианских наций.
2 года непрерывных атак ссученных христианами солдат чтоб заставить отказаться от объедков столовой. На просьбу к командиру роты о двойной пайке (еда) с моих денег в стройбате он ответил: двойная запрещена Минобороны людям ростом < 180см (у меня 172).
Потребовал выдачи мне заработанных мною денег для питания в буфете прапорщиков. Ответ Минобороны: запрещено солдатам давать заработанные ими деньги чтоб не было пьянства. Минобороны дало понять – солдаты должны снизить массу своего мозга, государству где власть у дураков не нужны умные. Как идеальный инженер-карьерист никогда не пил, не курил, но несмотря на все усилия получить мои деньги от дебильного государства не смог.
Государство не давало мне есть объедки в возрасте когда масса мозга, масса мышц растут самыми быстрыми темпами. Чтоб не дать мне инженерному богатырю нарастить мощный мозг, могучую мускулатуру.
Государство кормило солдат североморского концлагеря голода №16539 маргарином вместо масла. Масло только в праздники. Раб должен трудиться как требует Библия – В ПОТЕ ЛИЦА ТВОЕГО БУДЕШЬ ЕСТЬ ХЛЕБ. В христианском государстве цель госвласти: держать народ в труде, бедности, усталости чтоб не нарастил интеллект.
Дагестанцы, часть украинцев в роте отняв деньги у солдат обжирались в столовой продуктами с буфета прапорщиков, ежедневно посылали за мясом, приправами солдат идущих в увольнение в город.
Ежедневно 8ч вечера у них в столовой был пир врагов народа: дагестанцев, украинцев. Они добивались чтоб я прекратил есть объедки, отбирал деньги у солдат, присоединился к их пиру врагов народа. Я заявил: совесть не позволяет отнимать чужую собственность, нарушать права других людей.
В ответ дагестанцы, украинцы плевали мне в тарелку с едой, бросали мои подушку, простыню, одеяло в очко унитаза. Терроризировали тех кто позволял мне набрать тарелку каши с общего бачка на их столе. Мне из-за этого приходилось броском выхватывать полупустой бачок, вываливать кашу на свободный стол, есть ложкой с поверхности стола.
В 1930-х на самых богатых на урожаи землях Армия социалистической гадины СССР отняла всю еду у единоличников – 6 млн единоличников умерло от голода по идеологическим (коммунистическая евгеника Евангелия) мотивам Евангелия. Нетерпимостью к голодающим поедающим объедки отличались все народы СССР в моей роте за исключением прибалтийцев, среднеазиатов.
Терпимость к людям не совершающих преступления в менталитете прибалтийцев, среднеазиатов. В стройбате цивилизованными оказались только прибалтийцы, среднеазиаты. Прибалтийцы реагировали медленно, просчитывая ситуацию на годы вперед с прирожденной личной ответственностью за десятилетия своей будущей жизни в обществе, что может быть идеальным примером для всего человечества. У них рабочие места на заводе были по их типу мышления: высокооплачиваемая работа требующая точности, тщательности, осторожности.
Остальные народы СССР имели рабский менталитет – не признавали права человека на защиту от голода – рабу запрещено иметь в частной собственности его тело, мозг. СССР в тюрьмах, в Армии голодом уменьшал мозг гражданам: рабам запрещено иметь интеллект, права, личные цели и интересы, эмоции. Рабы – инструмент силовиков-рабовладельцев в госидеологии Евангелие.
Для лиц христианского менталитета государство законный рабовладелец имеющий право заставить гражданина-раба голодать, мерзнуть, мучиться. Этому учат христианские святые-мученики пропагандой образа гражданина-раба, который толерантен к всему от осознания себя рабом.
Запад в долгих войнах равных государств шлифовал демократию для сохранения лояльности граждан государству в его бесконечных войнах. Войны с равными по силе странами рождают демократию, научно-технический прогресс. В анализе различий между единоличниками, коллективистами ключевые понятия: голод, труд, терпимость. На Востоке Европы трудом, голодом вышибают с человека мозги до уровня раба по Библии – В ПОТЕ ЛИЦА ТВОЕГО БУДЕШЬ ЕСТЬ ХЛЕБ.
Госидеология как мера нетерпимости государства к человеку затрагивает всё. Жизнь людей восточной Европы минное поле. Не знаешь с какой стороны на тебя завтра нападет государство, его морально-людоедское рабское население. Граница «личная жизнь – политика» главная тема анализа различий «Запад – Восток».
Государство убивает в человеке единоличника. Единоличник – единственная сила поднимающая уровень жизни в стране. Коллективисты обедняют государство превращая в страну злобных голодранцев не умеющих богатеть, не дающие другим.
СССР делая по Евангелию с меня раба, не давало мне голодающему в Армии есть объедки в столовой. Объедки позволяли мне наращивать массу мозга для конкуренции против конкурентов-инженеров Запада в борьбе за титул чемпиона мира по конструированию.
После Армии чекистская сука моя мать каждый день многократно громко (слышали в соседних дворах) кричала: Валера (Ачаканов, сосед), его семья враги нашей семьи! Не приведя доказательств. Мать с ругательствами била кирпичом дверь где жила семья Валеры. Постоянно сыпала мусор перед порогом двери Валеры. В предыдущем месте жительства на улице Нурадилова 51 она вела себя точно также, для обоснования переселения в другой район города по приказу контрразведки.
1982г контрразведка сделала чекистской сукой младшего брата-наркомана Гаджимурада 1965г.р., который спрятал на полгода все мои инструменты технического моделизма. Когда я потребовал вернуть мои моделистские инструменты, чекистская сука Гаджимурад кричал: не твои инструменты, твоего в доме ничего нет.
На мое требование к матери вернуть мне для покупки инструментов для моделизма 10 руб (стоимость 2 пачек сигарет Marlboro) из 760 руб, заработанных мной за 2 года в Армии, временно отданных ей взаймы по ее настойчивой просьбе, брат-наркоман Гаджимурад 1965г.р. заявил: если я не перестану требовать эти 10 руб для инструментов он приведет в дом своих друзей чтоб разобрались с мной.
1982г: на народного конструктора Валеру Ачаканова напало христианское государство. Ему (3 раза удалило государство) выбили почку в Армии – радостно визжала чекистская сука моя мать.
Валера несколько лет ездил водителем пассажирского автобуса Махачкала – Москва до 2007г. Встречал его в Москве в Лужниках 2006-2007г, подробно рассказал о всех агентов контрразведки уничтожавших нашу с Валерой деятельность моделистов-конструкторов. Сообщил о юридических признаках оккупации, рабовладельческого государства. Сообщил: с 1970г государство добивается от меня отказа от профессии инженера, выбора профессии строительного рабочего или ювелира.
Мой контакт с Валерой привел в бешенство контрразведку: Валере 2007г запретили работать водителем: наркотик скрыто (2 раза удалили) провёз в автобусе неизвестный Валере агент контрразведки.
Чекистская сука моя мать приказом государства начала с 1982г опрыскивать мою еду и напитки раствором спецхимии стирающей в человеке личность, контроль над собой. Карательной спецхимией меня на десятки лет превратили в инвалида: попеременно 11 разных видов инвалидности.
Агентурный биохимический террор государство продолжило в Москве с 2002г, убивая во мне Изобретателя, Инженера. Классу силовиков выполнение целей Иисуса Христа важнее, чем право гражданина страны быть таким же Создателем как Генри Форд, Томас Эдисон, Вилли Мессершмит, Вернер фон Браун, Эрнст Хенкель, Соичиро Хонда, Акио Морита, Андре Ситроен, братья Сименс, Чарлз Парсонс.
Мы капиталисты против идеологии (национализировать тело человека, его землю, его средства производства, его мысли, изобретения, его детей ювенальной юстицией) коммуниста Иисуса Христа. Евангелие самая кровавая идеология в Истории убившая миллиард человек, идеология устраивающая международный террор, гражданские и мировые войны, революции, эпидемии, экотиранию!
Государство уничтожая мои модели, средства производства, фирмы, убивая всю жизнь во мне изобретателя предало меня. Если государство предало гражданина – он ничего не должен предавшему его государству, имеет право наказать государство за предательство. Нет неподсудных организаций – государство наказуемо. Государство изменяло мне гражданину с 1970г.
1982г придя с Армии я реализуя право человека на стопроцентное профессиональное самообразование инженера, техническую литературу покупал в единственном букинистическом магазине г. Махачкала, ул. Буйнакская у ж/д вокзала. Через 2 месяца контрразведка запретила продавать мне кавказцу в Кавказе научно-техническую литературу, технические справочники и энциклопедии.
Разрешали только художественную литературу. Пытался покупать через других людей: отказывали под предлогом: покупаете для него, ему нельзя продавать эти книги. Объяснять почему нельзя отказывались. Требовал объяснений, вызывали полицейского чтоб выгнать меня с магазина. Запрет государства продавать мне научно-техническую литературу формировавший у меня ненависть к этому государству, длился 13 лет до 1995г.
Инженерам выгоднее всего изучать инженерию по авиационной, космической технике. В ней самый высокий инженерный уровень разработок. Цензура несекретной технической литературы библиотек появилась 1972г (начало нефтяного кризиса, резкий рост цены нефти): страна дураков душила научно-технический прогресс в стране для сохранения максимума потребления нефти мировым рынком.
В всех библиотеках города Махачкала секретная инструкция запрещала давать кавказцам литературу про авиационную, космическую технику. При заказе библиотекари срочно звонили КГБ с другой комнаты, называя мою фамилию, спрашивая: можно дать.
По всем правилам в всех библиотеках выписал с картотеки сотни книг про авиационную и космическую технику, ни одну не дали. Везде твердили: эти книги не гостайна.
Если христианам я не нравлюсь как гражданин из-за мании изобретательству и мании профессионального величия, каков смысл блокировать мою эмиграцию? Не обязан же я единоличник всю жизнь терпеть плевки коллективистов в лицо, удары бутылкой водки по голове. Нельзя быть чемпионом по интеллекту?!!! Враг народа ПИСАТЕЛЬ (удалили) Антон Чехов требовал запретить слово чемпион: не по христиански быть лучше других.
4 раза в 21 веке в Москве я укладывал по темам (удалили) тысячу книг своей инженерной библиотеки по полкам, 4 раза контрразведка перемешивала все книги чтоб не пользовался библиотекой.
С 1970г государство уничтожало все созданное мною, включая публичное демонстративное уничтожение агентами моих моделей на моих глазах. Мои средства производства (станки, сварочное оборудование…) разрушили агенты силовиков.
1984г мою семью чекисты снова переселили, теперь в район где живут силовики. Каждый день на меня шли волны вредительства 72 многоразовых марионеток, не считая одноразовых пригоняемых с города государством.
1986-1987г когда я год в одиночку работал грузчиком на заводе «Дагэлектромаш», мне четные месяцы платили 96 рублей, нечетные месяцы 123 рубля, хотя за месяц перед моим устройством на работу, на моём рабочем месте работали два грузчика с зарплатой по 140 рублей каждый. Я весь год один заменял двух грузчиков. Мои жалобы бухгалтерии ни к чему не привели, завод отказался платить мне каждый месяц одинаковую зарплату. После моего ухода с работы там сразу заработали два грузчика с зарплатой по 140 рублей. Государство украло у меня мои деньги.
1986-1987г завод «Дагэлектромаш»: электрокарщикам дали инструкцию: оставлять 10% вырубленных мной (я работал за 2-х грузчиков и за резчика за 70% зарплаты грузчика, которую урезали сразу после моего поступления на работу) из листов деталей. Русская менеджер била меня тяжелым крановым пультом по голове за то, что я отказывался по её приказу оставить 10% деталей у станка чтоб начальство смогло меня уволить. Я грузил на тележку все 100% заказанных деталей.
Русский карщик на последних 10% деталей отъезжал на 10м от деталей, требуя ехать с ним. Я требовал дать мне догрузить детали. Он отказывался. Вручную таскал детали за 10м. Тогда карщик отъезжал на 20м отказываясь возвращаться. Я продолжал грузить пока карщик не отъезжал на 30м. Так каждый день.
На меня кричали начальники: почему не привез все детали, цех стоит. Я начинал объяснять ситуацию – мне криками не давали сказать ни одного слова. Так каждый день целый год пытались меня научного атеиста-Создателя превратить в христоса – лицо христианского менталитета.
Эта ситуация когда есть оправдание, но криками и угрозами не дают сказать ни слова бесконечно повторялась до 2022г в Москве когда я работал в фирме «ЗИЛ стемпинг».
1987г: учась в Дагестанском техническом университете обратился в Патентный отдел университета патентовать мои изобретения. В патентном отделе послали в Патентную библиотеку университета найти аналоги: шарнир, магнитная головка. На карточках картотеки одно, в полках абсолютно другое по всем темам: государство разделило одну большую картотеку на секретную и вредительскую публичную маркировку информации.
Дамы Патентного отдела заявили – не обязаны искать. Предложил 2 зарплаты дворника за помощь в подаче 2 заявок на изобретения. Ответили: закон запрещает брать деньги у частных лиц. Бесплатно отказались. Всё время учебы в университете постоянно применяли против меня агентурный биохимический террор через мою мать.
1987г я студент Дагестанского технического университета лично организовал студенческое конструкторское бюро СКБ на этаже-4. Разрабатывал цифровой магнитофон с единым ходовым валом (кассеты по обе стороны вала магнитофона) обоих кассет для сверхбыстрого копирования одной кассеты на другой без 2-канального регулирования скорости ленты + лично разработанная мной за 3 дня система цифровой записи с нелинейным шагом квантования + изобретённая мной в 1980г МАГНИТНАЯ ГОЛОВКА с 3-канальной 3D-записью на одной дорожке магнитной ленты (2 полноценных канала + малый канал-3) + корпус-куб: меньше надо материалов на панели корпуса, проще организация охлаждающих потоков.
Через 3 месяца руководство вуза чтоб не позориться конфискацией у меня ранее выданного мне на организацию СКБ ключа, заменили замок помещения СКБ. Причина ухода через полгода с университета: разговор с преподавателем. Он: по окончании вуза обязан 3 года отработать куда направит государство. Я: бесплатное образование. Он: не бесплатно 3 года. Я: граждане налогами оплачивают вуз, государству не должны. Он: подключат прокуратуру.
Государство 10 лет терроризирует в школе, 2 года в Армии, 5лет в вузе, 3 года на рабочем месте неизвестно в какой дыре. Итого 20 лет террора не давая реализовывать личные проекты + десятки лет начальники на рабочем месте будут терроризировать меня как инженера, блокируя мои разработки своими взглядами на технику, присваивая мои достижения по идеологии принудительной дедовщины от контрразведки. Защита прав инженера кончится запретом профессии инженера.
Всю жизнь меня как раба на цепи майоры, полковники контрразведки будут водить с одной тюремной системы в другую, сделают невыездным рабом госпредприятия, блокируя все попытки доказать: я чемпион мира по конструированию. Я не раб государства, найду другую страну! Ушел с вуза готовиться к эмиграции.
1988г государство уничтожило мою трудовую книжку при поступлении на работу. Сдал трудовую книжку в пятницу начальнице отдела кадров Булочно-кондитерской фабрики Махачкалы. В понедельник она объявила: трудовая книжка исчезла с её закрытого на ключ сейфа. Под угрозой отказа приёма на работу она (лакская чекистская сука. Лакцы – нация предателей, гавно Кавказа) записала в новой трудовой книжке: трудового стажа нет. Пропали 10 лет стажа, профучебы в трудовой книжке.
1989г искал способы не оставлять следы для нелегального перехода границы в Финляндию из страны дураков. Нашел способ сутки не оставлять нигде отпечатков пальцев – нитроцеллюлозный лак на кисти рук и сутки человек нигде не оставит никаких отпечатков пальцев, нитроцеллюлозный лак на руках невидим.
1995г отец показал мне текст секретной Инструкции КГБ высшим лицам Польши 1970х. Текст с Западных СМИ просочился к нам. Инструкция запрещала властям подключать к воде, канализации людей приехавшим в город, купившим жилье. Мать отец приехав в Махачкалу купив жилье на ул. Нурадилова 51 проживая вместе > 10 лет, не могли добиться разрешения подключиться к воде, канализации.
Инструкция говорила о штрафах. С 1982г постоянно раз в 2 месяца приходила госвласть проверять, не заменила ли наша семья полуразрушенную водой с сгнившей крыши саманную стену дома на кирпичную, угрожала штрафом в 1000руб если заменим без разрешения.
Что такое получить разрешение мы знали по бесконечным безуспешным попыткам с водой, канализацией. Штраф 1000руб (!!!) рублей за замену 2кв/м стены при зарплате строителя (работал) 90руб, инженера 120руб, лифтера и дворника 70руб.
В 1990-х не смог купить 50 кирпичей в строительном рынке – требовали разрешение городских властей на кирпичи. Решил ежедневно покупать кирпич, увозить в сумке. Для покупки одного хрупкого некачественного глиняного красного кирпича размером с ладонь на рынке Махачкалы требовали разрешение городских властей: инструкция КГБ для Польши работала не только в Польше.
Отец ознакомил меня с Инструкцией: за это государство отказалось выдать ему загранпаспорт в 1995г. Возможно эту Инструкцию КГБ он купил в книжном магазине Испании, куда часто ездил. Отец подал в Суд для отмены запрета. В отместку государство применило против него агентурный биохимический террор: сразу после выигранного Суда он заболел, 2 года мучений умер ОТ РАКА (4 раза удалило государство) в 59лет. Суды выносят 2 решения: открытое официальное + карательная секретная инструкция-месть спецслужб за непризнание гражданина себя рабом по Евангелию.
1976-1996г я в библиотеках без конца выписывал по каталогу книги по авиационной, космической технике. Ни разу не дали: была попытка отнять у меня читательский билет за выписывание с каталога «несуществующих» книг. Меня спас вопрос: как узнать по карточке что книги нет. Ответить не смогли.
Десятилетиями с надеждой выписывая в каталогах авиационную и космическую литературу в 1997г я обнаружил: цензуру сняли. С утра до вечера каждый день читал книги по авиационной и космической технике в всех библиотеках Махачкалы, без отказов изучил в библиотеках сотни книг авиационной, космической техники. В этот период государство вело против меня самые тяжелые атаки и провокации чтоб прекратил читать.
1997г контрразведка нанимала уголовников чтоб не читал авиационную, космическую литературу. В Махачкале в Центральной библиотеки им.Стальского в 30м от здания МВД Дагестана через 10 минут после моего прихода в библиотеку ворвался крупный уголовник. Бегая по читальному залу он 5 минут кричал: люди хотят стать слишком умными чтоб служить Америке. Читателей было 14 человек. Кроме уголовника и библиотекарш через 5 минут остались 2 мощных парня спецслужб, севших за стол позади меня через 4 минуты после моего прихода. Эти не читали, следили за читателями чтоб жестом дать знак агенту-уголовнику применить насилие против тех на кого укажут взглядом. Контрразведка из-за меня в 1998г вернула в Кавказе на 75% цензуру на техническую авиационную и космическую литературу, которая есть и сегодня.
1997г в Центральной библиотеке им.Стальского в 30м от здания МВД Дагестана контрразведка годами вырезала с технических аэрокосмических книг абонемента фотографии космической техники. В научно-технической библиотеке возле телецентра в Дагестане контрразведка с 1997г годами вырезала фото зарубежных автомобилей с российских автомобильных журналов. Я неоднократно годами поднимал в библиотеке этот вопрос. По злобной реакции на вопрос крупных мускулистых библиотекарей было ясно: режут по секретной инструкции государства.
1997г чекистская сука моя мать отдала специально для этого устроившегося на временную работу чекистской суке младшему брату (1963г.р.) Гамиду 2 комплекта моей лучшей парадной одежды, в которой я ходил в библиотеки. За 2 дня он изорвал их в куски по приказу государства.
Мать не спрашивая меня бросила на стирку оставшуюся парадную одежду. Добавив в воду спецхимию контрразведки разрушающую ткани, мать за 3 дня превратила в лохмотья всю дорогую парадную одежду: одежда порвалась на куски при попытке выжать воду. За знаниями с 1997г пришлось ходить в библиотеки в старой грязной (боялся спецхимии в стирке) сильно изношенной одежде.
В Армии сдашь в стирку одежду – химчистка рвет половину пуговиц: христиане считали – бесконечное шитье пуговиц, труд остановят эволюцию мозга. По Евангелию гражданин это раб, рабу запрещено думать. Чтоб защититься от Евангелия приходилось в Армии ходить грязным.
В Армии запрещали мне на ночь (синее удалили) прятать под матрац одежду, сапоги. Только на табуретке чтоб украли. У меня украли больше чем у любого другого солдата за всю историю СССР. Нашел выход: не стирал одежду чтоб не крали. Из 2600руб заработанных мною за 2 года в Армии 1000руб ушло на одежду, сапоги.
1997г в Махачкале чтоб я прекратил заниматься изобретательством наркодилер контрразведки старший сын комендантши дома – чекистская сука русский Вадим многократно уговаривал меня стать наркоманом, предлагал надежные дешевые поставки любой наркоты.
1998г когда я пытался получить политическое убежище в Италии российская спецслужба применила против меня агентурный биохимический террор. Чекистская сука моя мать дала мне в Италию сумку с отравленной спецхимией едой чтоб не дать эмигрировать.
Когда на рынке обменивал свои книги на другие, обнаруживал через 3-4 дня: приобретенные книги исчезают, отданные мною за обмен ненужные мне книги снова под моей кроватью. Исчезают с моей личной библиотеки по несколько в год наиболее важные книги, которые никого не интересуют в общежитии.
Государство запретило мне не только профессию конструктора и карате (агентурный биохимический террор), но и профессию программиста: с 2004г я купил десятки бумажных (удалили 2 раза) учебников программистов, государство украло все бумажные учебники. Государство постоянно удаляло с моего компьютера учебники программистов и сайты для изучения программирования.
2001г для эмиграции я поселился в Москве, начал как изобретатель ежедневно обегать организации зарубежных стран. В посольствах стран их секретные инструкции запрещают контактировать с изобретателями.
2002г государство снова начало агентурный биохимический террор чтоб мне кавказцу блокировать эмиграцию с идеологического государства. Русские – забирайте себе наши кавказские земли если вам не хватает земли, только прекратите блокировать кавказцам эмиграцию с идеологической тюрьмы народов России! Мы не будем жить по человеконенавистнической госидеологии Евангелие!
2003г в ответ на получение мной 4 патентов на изобретения через 3 года в 2003г приняли против изобретателей законы, делающие финансово невозможным патентование рабочими изобретений через патентного поверенного. Узнали о договоре с патентным поверенным о дешевом ($70 за заявку на патент) патентовании моих 700 изобретений – через полгода он умер.
2003г: государство крадет цветные ручки (50 штук) для рисования, заменяет проверенный мной качественный белый отбеливатель для бумаги на неработающую жидкость в той же упаковке. Много раз не смог делать рисунки для сайта.
Стерли всюду файл скана главного рисунка сайта на 54Мб. После нового скана в бумажном главном рисунке закрасили черным цветом (видно в самом верху сайта) диски сцепления и их шлицы, заново отсканировав заменили файл главного рисунка сайта. Пришлось красить отбеливателем черное пятно, заново рисовать шлицы, заново сканировать. На закраску ушло 2 недели: каждый день государство заменяло белую краску в тюбиках отбеливателя на полупрозрачную жидкость: потратил много денег покупая каждый день несколько самых дорогих отбеливателей разных фирм: > 50 тюбиков. Купил > 50 шариковых ручек для рисования, через неделю ни одна не писала.
2004г в общежитии в Москве полгода ежедневно пытались споить под угрозой избиения.
2003-2005г государство украло 14 мини-дисков с текстом для сайта. Оставшиеся диски подменили внешне такими же с вредительски измененными текстами, часть текста вырезана, мои рисунки исчезли.
Мне в общежитии завода ЗИЛ чекисты нанесли сотни ударов по голове, включая многократные удары бутылкой водки по голове. Когда впервые заявил: в преступлениях против меня виновата христианская госидеология в 2 часа ночи, когда я спал на своей кровати, мне сломал нос кулаком представитель безопасности общежития ЧЕКИСТСКАЯ СУКА Олег Васильев.
К нему приходили отчитываться его подчиненные – двое крупных мускулистых охранников подъезда. Их поставили охранять подъезд через 3 дня после того как я наладил дружеские отношения с группой американцев чтоб эмигрировать. Охранников всегда ставили только в подъезд, куда меня переселяли чтоб ко мне не ходили иностранцы.
5 попыток свалить кровать на мои модели под кроватью, чтоб раздавить. Представители системы безопасности общежития чекистские суки Олег Васильев, Дмитрий Рындин раз в 4 дня постоянно ставили передо мной бутылку шампанского, простреливали ее насквозь из пистолета. Этим пистолетом потом целились мне в глаз, после чего простреливали насквозь мои личные вещи. Оба 4 года ежедневно устраивали уголовные провокации чтоб по статье убрать меня с Москвы. Они объявили мне что я виновен в нарушении заповеди-2 Библии (намек на мою любовь к профессии конструктора-изобретателя).
Внезапно с всей силы метали мне в лицо многокилограммовой сверхтяжелой (стенка толщиной 1см по спецзаказу) фарфоровой кружкой, несколько раз чуть не сломав мне руку: как каратист успевал закрыть лицо рикошетным блоком рукой. Им на помощь каждый день приходили неизвестные люди мастера единоборств, которые ежедневно искали способы вывести меня из себя чтоб изувечить, отправить в Кавказ. Комнату общежития заселили на многие месяцы мастерами спорта по единоборствам. Мастер спорта по боксу мне с угрозами проводил ножом по сонной артерии на шее. Ежедневные угрозы, провокации.
Днем и ночью ежедневно провокации большим списком лиц. Ночью прыгали задницей на мое лицо. Заливали водой мои вещи как делали мне дагестанцы в Армии. Для выдворения с Москвы меня законопослушного рабочего, прислали с Махачкалы уголовника-рецидивиста, зарезавшего в Махачкале моего соседа по подъезду: этаж-8 направо от выхода с лифта. По осторожно-уважительному отношению к этому рецидивисту офицеров Прокуратуры, ФСБ с дома силовиков в Махачкале, куда государство переселило мою семью, понял: их человек.
Его за 2000км прислали в Москву дежурить в моем подъезде, уголовными провокациями (загоняли в тюрьму) выкинуть меня с Москвы. За 63 года моей жизни уголовные провокации (загоняли в тюрьму) против меня применили ~50 раз.
02.2008г: государство убило мои сайты в интернете. Потратил массу нервов, денег чтоб 6 раз сменить хостинг из-за преследования сайтов. 2 агентства переводов текстов в Москве после работы на меня, под угрозами контрразведки отказались переводить мои статьи: мы не обслуживаем частных лиц, только организации. 3-е агентство переводов демонстративным вредительством заставило меня отказаться от их услуг, 4-е агентство переводов через 4 месяца потребовало +20% денег за каждую страницу, из-за того что я двоеточием сокращаю тексты. Мои сайты уничтожили в апреле-мае 2010г.
Десятки лет христиане демонстративно выискивали мои личные цели, блокировали агентурой давая понять – рабам запрещены личные цели, интересы. Всю мою жизнь в нее ежедневно незаконно вмешивались майоры, полковники чтоб не дать мне супермену доказать моё интеллектуальное превосходство инженера над человечеством.
2004-2007г государство угрожало мне агентурным биохимическим террором стереть мою память за попытки эмиграции.
2007г зарегистрировался в membrana.ru Из-за моих инженерных коментов сайт прекратил модерацию, удалил мой аккаунт, пароль. Я снова регистрировался: ждал 40 дней (ждали пока забуду), сделал 3 звонка по телефону через недели. Отключили мне возможность вставлять информацию, из-за меня ликвидировали на 16 лет membrana.ru Заблокировали в ru.wikipedia.org , удалили все мои инженерные коменты инженера в popmech.ru
2007г третья попытка моего убийства по заранее составленной легенде спецслужб.
РОБОТОТЕХНИКА 2008: вход на конференцию госробототехников 1500руб для народных робототехников. Выступление 3000руб. От студентов физтеха из Долгопрудного потребовали по 500руб за вход на конференцию. Государство уничтожало негосударственную робототехнику для госмонополии на роботов. Участником выставки разрешено быть только госорганизациям. В предыдущих выставках Робототехника в Москве (на ВВЦ) участниками был народ: конструкторы, изобретатели. Дату проведения сдвинули к Новому году чтоб снизить посещаемость народом. Технические выставки с 2008г проходят в рабочие дни в рабочее время (раньше только в выходные дни).
Народ! Запомни тварь назойливая! Техника не для тебя раб божий! Техника только для государства! Не смей раб мечтать о народной робототехнике! Не смей мыслить, конструировать раб! Рабу не положено быть Создателем. По Плану Создателя (Евангелие) рабу как животному разрешены только животные потребности. Техника уничтожает самое святое в Плане Создателя – Труд – рабам запрещено эволюционировать. Изобретательство, рационализаторство запрещены Евангелием как угроза Труду.
Госвузы, госпредприятия всегда будут блокировать конкуренцию, разрушать экономическую, военную, политическую безопасность гражданского общества, государства.
Рассмотрим их преступления: 1941-42г: оборудование госпредприятий эвакуировано на восток. Транспортировка не > 2 недель. Довоенный уровень выпуска военной техники госпредприятия восстановили через 3 года. В Германии всю военную технику делали частные фирмы. 1943г: почти все крупные предприятия Германии уничтожены бомбардировщиками. Немцы ответили передачей производства деталей техники многочисленным мелким частным, обычно семейным фирмам. Часть которых в сельской местности.
Такие предприятия не видны с воздуха: германская авиапромышленность стала неуязвимой для бомбардировщиков. Это при уже практически не работающих крупных предприятиях позволило немцам в 1943-44г увеличить годовой выпуск военных самолетов с 26000 до 39500 штук. Реактивные истребители собирали в лесу в покрашенных в маскировочный цвет печных избах с станками у шоссе, откуда взлетали.
Госпредприятия СССР за войну никогда не выпускали > 40000 самолетов в год. У Германии нет природных, топливных, человеческих ресурсов. Несмотря на подавляющее превосходство в природных, топливных, человеческих ресурсах госпредприятия были преступно малопроизводительны, неспособны к мобилизации. Гнали на фронт некачественную технику. В лучшем истребителе госпредприятий Ла-7 ужасная 1-канальная рация, жара 55°С. У немцев хорошие 3-канальные рации + радиоопознаватель свой-чужой + радиолокаторы, реактивные двигатели.
В Ла-7 для роста скорости летчик двигает 7 рычагов, у немцев 1 рычаг общего автомата управления впрыском топлива, углом дроссельной заслонки, углом атаки винта, жалюзи системы охлаждения. Немецкие летчики-истребители совершали 6 боевых вылетов в день, советские вдвое меньше с большими потерями из-за большей усталости летчиков.
1 летчик на 1 самолете от частных фирм заменял 2 летчика 2 самолета от госпредприятий. На фронте тысячами воевали вертолеты от частных предприятий разных стран. Госпредприятия не смогли ни одного. Частные предприятия поставили на фронт 1943г тысячи танков с двухосевым стабилизатором пушки. Госпредприятия не смогли ни одного. Частные предприятия серийно выпускали атомные бомбы с 1945г.
1944г: частные предприятия выпускали гиперзвуковые ракеты V-2. Частные фирмы 1-ми в мире поставили на боевое дежурство межконтинентальные ракеты в 1959г, которые были в 5 раз точнее, чем ракеты от госпредприятий. Частные фирмы 1-ми в мире поставили цифровой компьютер на боевые ракеты, первыми в мире создали разделяющиеся боеголовки с индивидуальным наведением. Необходим моральный судебный процесс в Интернете против госпредприятий в связи с гибелью лишних десятков миллионов граждан из-за госпредприятий.
Необходим судебный процесс в Интернете против госпредприятий, госвузов. Госвузы занимаются не обучением инженеров, которое должно проводиться через моделизм, разработки, изобретательство студентов, а созданием культуры информационных педерастов, обрезающей мозги инженера ненужными (отучить студента от поиска профинформации, выбранной не классом силовиков) знаниями, требующей от инженеров сверхузкую специализацию.
В госвузах нет профессии автомобильный конструктор: опасно для Евангелия усилением влияния универсальных конструкторов. Один талантливый универсальный конструктор отнимет рабочие места сотен тысяч информационных педерастов-конструкторов.
Навязанная силовиками культура информационных педерастов запрещает незаменимость человека. ПРИМЕР: в АвтоВАЗ менеджерами работают офицеры спецслужб, поэтому АвтоВАЗ имеет максимум господдержки через госбюджет и всегда работает в военизированном околобанкротном состоянии, активные конструкторы в околоинфарктном состоянии. Конструкторы рабы менеджеров, которым кроме стабильности в их понимании ничего не нужно. Конструкторы АвтоВАЗ обрисовали мне ситуацию – завод нанял конструкторов в 10 раз больше чем нужно, чтоб менеджеры могли всё время нагибать конструкторов – не выполнишь приказ уволим, незаменимых нет.
Профобразование должно быть частным, бесплатным (по госзаказу). 1-й год обучения оплачивает государство. Дальше неталанты платят за талантов. (этот синий текст перед публикацией удалили с моего ноутбука, с моей флешки на работе в закрытом на замок ящике. Писал заново)
Отставание СССР в электронике от того, что класс силовиков тратил миллиарды человеко-часов на стройку Зеленограда, секретных городов-тюрем, как рабов загнал туда специалистов.
Таланты не будут эффективно работать без прав человека. Чтоб не было госрегулирования жизни: никто за них не решал где жить, кем работать, с кем и как работать, в каком направлении работать, на каких условиях и средствах достижения цели работать, сколько человеку разрешено иметь денег, с кем контактировать, как когда отдыхать, по какому графику работать, регулировать интенсивность своего труда. Только свободное творчество свободного человека в свободном государстве обеспечит конкурентоспособные промышленность, экономику, достойные уровень, качество жизни граждан.
Государство хочет поддержать наукоемкий бизнес – конкурсы частным фирмам, индивидуальным конструкторам на товар с хорошо оплачиваемым заказом, а не загонять людей на информационную педерастию в госвузы. Государство должно признать право любого человека на стопроцентное самообразование в любой профессии не связанной доказано (презумпция невиновности) с госвластью и госслужбой.
2008г командировали в другой цех для конфискации моих запасов новых мощных транзисторов, тиристоров (с мусорки) для рацпредложений. Постоянно 36 лет государство уничтожало все мои запасы материалов, оборудования для технического моделизма.
2009г отпилив под предлогом одного дня моего отсутствия (был в выставке станкостроения), замок моего личного рабочего шкафа возле станка, конфисковали эльборовый токарный резец. Нужен в обработке закалённой стали в изготовлении конструируемых мной станочных приспособлений.
За 4ч до моего прихода с выставки отпилили замок под предлогом: в моем рабочем шкафу рогатый микрометр. Их в цеху 3 штуки одинаковых. Через день с закрытого бронированного шкафа с надежным замком в раздевалке силовики не тронув ничего другого украли 5 эльборовых токарных резцов чтоб не занимался техническим моделизмом, рационализаторством, изобретательством.
Выставка АРХИМЕД 2009: не смог продать мозг чемпиона мира по инженерии. Выставка «ИНТЕРПОЛИТЕХ 2009»: все технические товары с изобретательским уровнем закрыли от народа в павильонах, куда вход только силовикам.
В выставках «ИНТЕРПОЛИТЕХ» в Москве годами народу запрет смотреть половину павильонов зарубежных фирм. Чтоб народные предприниматели не знали о принципе действия противоугонных систем, взлому которых в секретных вузах силовиков пока еще не обучены агенты против предпринимателей. Чтоб предприниматели не знали о труднообнаружимых средства выявления агентов. Это нарушает право гражданина на защиту от агентурного идеологического террора государства.
2010г на работе на крыше барака у моего рабочего места спрятал у дохлой кошки среди 200кг мусора 30кг 2 года собираемой мною не пружинящей железной проволоки для моделей. Чтоб в обед делать с проволоки модели (новые идеи): костюм телеприсутствия, роботы, другую технику, ставить фото моделей в сайт. Крыша барака высокая, без длинной лестницы не попасть. Государство оставив всё на месте убрало проволоку. > 10 лет под моей кроватью в общаге убирали всю проволоку для моделизма, постоянно удаляя информацию об этом здесь.
2010г: удалили с моего компьютера с паролем папку с учебными сайтами по программированию. С 2004г я купил десятки бумажных учебников программиста, государство украло все бумажные учебники программирования. Государство Россия запретило мне не только профессию конструктора, но и профессию программиста. Россия нарушает моё конституционное право на выбор профессии.
2010г: удалили с моего компьютера с паролем большую папку с коллекционируемыми мною фото, сайтами про технологии автомобилей Формулы 1. Каждый год перед Новым годом собираю 3-4 календаря следующего года с выставок, выбрасываю в мусоропровод старые календари. 3-й год в 1-е дни нового года исчезают все календари нового года, вместо них всегда снова лежат старые мокрые прошлогодние с мусоропровода.
2010г: ставя подпись за половинку зарплаты обратил внимание – неполученная прошлая половина зарплаты (аванс) не вошла в получаемую. Всегда прибавляли к получаемой. Неделю добивался возврата неполученной половины зарплаты. До этого у меня пытались отнять премию, треть зарплаты.
Командировали на конвейер дав 2 двадцатилетних гаечных ключа под расписку. В обед при выходе с завода в кассу завода на меня оформили акт о лишении премии за «кражу 2 гаечных ключей» в кармане спецодежды. В цехе кладовщица отказалась дать записку «2 ключа выданы под расписку о взыскании денег за утерю» без разрешения мастера. Услышав это мастер резко повернулся, убежал! Не смог догнать. Кладовщица узнав это резко захлопнув дверь убежала с цеха! Убежавших кладовщицу, мастера 3,5 часа искал до конца рабочего дня весь цех: конвейер стал: нужны с кладовой болты, гайки, комплектующие: завод не выполнил план на полсотни автомобилей ценой в $100000 из-за 2 ключей на $0,5, чтоб отнять у меня премию, треть зарплаты. Целых 3 дня бегал по заводу, возвращал мою премию, треть зарплаты. Не хотели возвращать, отняли массу нервов.
Дважды писал в записную книжку: пойти на выставку НТТМ-2010. Дважды запись убрали отбеливателем. В прошлом году это снова повторилось. В моей записной книжки десятки адресов почт, телефонов превратились в невидимые на белом фоне, белые пятна. В androiduniversity.com 06.2010г заменили мой мобильный телефон на несуществующий.
Дважды стерли отбеливателем с записной книжки дату проведения ежегодной выставки «Высокие технологии 21 века» 2011-2012г, потом из-за меня ликвидировали саму выставку.
2011г август: государство уничтожило полностью готовую для установки на метровую модель танка 2 метра полнофункциональной танковой проволочной гусеницы сделанной мною 1990г. Которую просил выслать в Москву: на следующий день уничтожили гусеницу.
2011г: украли мои 2 стула в раздевалке, 1 стул у станка в заводе ЗИЛ. 1980-82г: Североморск, Армия: 80 раз в рабочем месте агентура крала мой стул у электропилы, выбрасывала в помойку в кучу масляных тряпок. На помойках находил, отмывал от масла стул, привязывал к пиле метрами железной проволоки диаметром 5мм. Агенты 2 года постоянно в обед кусачками откусив проволоку выбрасывали стул в помойку.
Дважды удаляли с моего компьютера графический редактор Gimp после выполнения на нем работы для сайта.
Записал в записную книжку список прочитанных (не читать дважды) номеров журнала «За рулем» за 2011г. Запись удалили отбеливателем.
С «деколлективизация собственности, ответственности, ЧЕЛОВЕЧЕСКОЙ МЫСЛИ» удалили «ЧЕЛОВЕЧЕСКОЙ МЫСЛИ».
2011г: с компьютера удалили десятки новых статей, готовил месяцами. Постоянно удаляют с моего компьютера под паролем лицензионные переводчики языков.
2011г: в моем компьютере и спрятанных в разных местах флешках удалили несколько десятков созданных мной крупных текстов.
2012г библиотеки Москвы блокируют мой сайт и сайт popmech.ru из-за ссылки на мой сайт в странице «Система аватар» про костюм телеприсутствия. Первый в мире форум (9 страниц с чертежами) с этой темой удалил roboforum.ru из-за ссылки в мой сайт.
2012г: отказал в бесплатном рабочем месте инженера-конструктора 18-й работодатель России – R.Bot (роботы). Когда я позвонил в офис R.Bot власти через 9сек слышимого дозванивания (с этого звонка звук дозванивания в телефоне исчез на 2 года: после набора через минуту внезапный голос после тишины) отключили заряженный телефон, сим-карту. Я временно отключил аккумулятор, перезагрузил телефон, нашел офис, но с отключенной сим-картой позвонить с проходной не смог.
Когда пришёл в своё койко-место в общежитии возле моей койки 2 чекиста многократно орали мне карательный лозунг христиан: хочешь рассмешить бога расскажи ему о своих планах. Этот лозунг раньше постоянно орали мне чекисты Махачкалы.
Через день предлагал фирме R.Bot бесплатно работать на неё с бесплатной передачей ей десятков моих разработок, технологий, сотен изобретений. Чтоб превратить моё имя в инженерный бренд для создания мной изобретательской фирмы. Отказали.
Ситуация с отключением телефона, симки через 3 месяца повторилась в попытке дозвониться до робототехнической фирмы Neurobotics. Отказали.
2012г: с закрываемой на ключ комнаты общежития исчезла половина моих проволочных моделей. 5 раз стирали с моего компьютера, делали неработоспособным лицензионные компьютерные переводчики.
2012г: в моей личной библиотеке с которой государство борется с 1975г, исчезла за последние годы значительная часть ключевой технической литературы, украли недавно купленную книгу Крайнева «Идеология конструирования».
В статье про костюм телеприсутствия 3-й раз в фразе «конструкцию позволяющую силой до 100кг сгибать палец тягой» убрали предлог «до» в Интернете, в копии сайта в компьютере, в текстовом файле через 4-7 дней после моего исправления вредительства. Это синхронное вредительство через дни после публикации было > 100 раз.
С описания конструкции костюма телеприсутствия полностью всюду постоянно удаляли слово «тензодатчик», ключевые куски текста; делали бессмысленным текст. Аналогично в статьях «экзоскелет».03.2013г.
С статьи 1) 4 раза удалили термин «диапазон рассогласования углов», фразу «Для разминирования, хирургических операций: мал диапазон рассогласования углов, больше чувствительность (малое, отрицательное усиление) к малым силам. Управление крупногабаритными манипуляторами: мал диапазон рассогласования углов, больше точность датчиков углов, силы». В статьях убрали слова о питании андроида оптокабелем (мой приоритет идеи).
На работе в закрытом на надежный замок рабочем шкафу с 2003г в 100% моей рабочей обуви всех видов разрезают ножом полностью поперек в центре переднюю часть подошвы и подрезают ножом спереди назад треть каблука, от чего он всегда болтается. Кроме того в выходные дни растворителем растворяют каблуки, из-за чего они в дырах, всасывают воду, заваливаются вбок.
2012г: удалили с компьютера бесплатную программу сравнения текстов WinMerge: проверял вмешательство в мои сайты. Снова после 3 месяцев восстановления загадочно исчезнувшего кода, работает в обоих сайтах стрелочный поисковик (платил за него большие деньги). Затем код опять загадочно исчез с хостинга - стрелочный поисковик больше не работал.
05.2012-02.2013г: ни за какие деньги или через админку не мог убрать формулу в самом низу этого сайта возле счетчиков под моей фотографией. С 2004г не дают обслуживать мой сайты.
2012г: с 2005г по сайту на мой телефон никто не дозвонился. Звонки сразу обрываются, в экране: вызов переадресован.
2012г: впервые за 10 лет моей работы заточником фрез все заточники и слесари МСЦ-3 стали чекистскими суками, стали собирать фрезы с выступающими на 2см за диаметр и торец новыми ножами. Объяснил слесарям: для плавности, долговечности работы фрезы нож в идеале должен выступать не больше, чем на 5-кратную величину толщины стружки.
Слесари-вредители нагло врали: так всегда делали, так якобы просили фрезеровщики. От меня фрезеровщики наоборот требовали чтоб ножи меньше выступали, а то станки дребезжат. 3 раза фрезеровщики подтвердили – не просили.
Добивался от слесарей прекратить вредительство, не высовывать так сильно новые ножи из фрезы при сборке. В ответ отказ, ложь, крики, бесконечные угрозы позвонить начальнику чтоб меня уволили. Пришлось годами самому забивать все ножи (зубья) фрез.
Заточница Марина имела зарплату как у меня. После её вербовки против меня зарплата у неё выросла вдвое, на час раньше всех уходила с работы.
Все заточники, слесари МСЦ-3 криками, угрозами полгода добивались запрета для меня использовать алмазную доводку режущих граней фрез, 1 раз чуть не проломили мне череп ударом фрезой за отказ. Якобы алмазная доводка лишний труд. Алмазная доводка в 3 раза уменьшает время заточки фрезы. Без доводки алмазом фреза служит 3-7дней, с алмазной доводкой от 3 месяцев до 3-х лет.
Через полгода крикливых требований и угроз пяти активных вредителей профессиональный взломщик взломал мой личный шкаф на хорошем замке (ключ только у меня) выбросил в мусор все мои 4 старых алмазных круга и закрыл шкаф на мой замок. В тот же день исчезли 2 старых алмазных круга на складе под замком. Трижды менял лучшие замки: профессиональные взломы моих личных шкафов без следов на замке десятки раз в ЗИЛ. Годами нанимали против меня взломщиков, диверсантов.
90-95% ежегодной работы по заточке инструмента в заточном цеху МСЦ-3 выполнял я. Почти год каждый день защищал право заточника на алмазную доводку фрез от активной команды чекистских сук, бегал по другим цехам искать старые алмазные круги.
2013г 3-й раз украли с моего шкафа на замке в раздевалке алмазный карандаш для правки абразивных кругов.
2013г: украли 5 многократно использованных старых носовых платков с уличной и рабочей одежды, украли 4 пары моих старых войлочных стелек с рабочей обуви в закрытом шкафу раздевалки и с парадной обуви в общежитии. Рубашки в которых ходил в выставки – в коричневых обоженных пятнах: опрыскали (пятна размером с ладонь) раствором кислоты. 2-й раз украли у меня фанерный шит над сеткой матраца, 2-й раз подрезали железную сетку под матрацем.
При тюнинге моего компьютера мастер-компьютерщик обнаружил шпионскую плату радиоуправления моим компьютером, замаскированную под карту диагностики компьютера в её разъеме. На фальшивой карте диагностики мастер-компьютерщик нашел лишние микросхемы. Я сфоткал карту.
2013г: в статье «Костюм телеприсутствия» в статьях про экзоскелет удалили чисто техническую часть текста, перемешали технические тексты разных статей. При восстановлении текста в реальном времени на моем не подключенном к интернету компьютере часами демонстративно вырезает ключевые слова с создаваемого текста майор инквизиции, каким то образом подключенный к моему компьютеру.
2013г: на моих глазах подключающийся к моему компьютеру (в нем нет вайфая, блютуза; никогда не подключается к интернету) майор убирает в предложениях предлоги, куски текста, заменяя чужим текстом, меняет единственное число на множественное и наоборот, перемешивает куски текста, добавляет вредительские слова. Это десятки раз с техническими статьями, которые из-за этого приходится писать по 3-4 раза перед публикацией, без конца восстанавливая в компьютере и админке после публикации. Успешные публикации через 2-3 дня заканчиваются синхронным вредительством против технического текста в сайте, компьютере, ноутбуке, флешках. Сегодня в трех готовых технических статьях майор удалил 15КВ текста.
С каталога institutrobotov.ru/id1 удалили shadowrobot.com bostondynamics.com popmech.ru В Энциклопедии для ИИ дважды удалили с «Навигационная база» половину информации. С компьютера удалили все мои сайты до 2010г. В оставшихся изменили текст, размер букв. Исчезла бумажная книга «Лунная гонка» Б.Черток, удалили с моего компьютера фильм про высадку человека на Луну и большую часть статистики сайта за годы. Нашел, удалил с сайта вредительский код фальшивой горизонтальной полосы прокрутки.
2014г в Энциклопедия для ИИ постоянно меняют «автомат перекоса» на «автомат стабилизации», вредительство против статьи «3 стадии эволюции сложных объектов». Обнаружил: вставленные мной несколько лет назад в сайт «телекамеры внутри ладоней андроида, экзоскелета» вырезаны с сайта. После покупки мной книг, дисков их заменяют на чужие не нужные.
2014г: с всего сайта с слов «деколлективизация собственности, ответственности, ЧЕЛОВЕЧЕСКОЙ МЫСЛИ» удалили ЧЕЛОВЕЧЕСКОЙ МЫСЛИ. Уничтожили в компьютере и флешках мою статью про экзоскелеты. За 12 лет украли тысячи визиток на сверхтонкой бумаге для выставок, заменяя обрезками ватмана с словом «Феррари» или адресом сайта. С 2003г годами блокировали мне посещение технических выставок в Москве вначале подмешиванием мне в еду, в напитки спецхимии вызывающей синдром хронической усталости, затем подмешиванием мне в напитки снотворного перед выставками.
С моего компьютера 3 раза удалили информацию про выставку изобретателей Архимед-2012, Архимед-2013, Архимед-2014. Пропустил из-за этого. До этого пропустил ~15 технических выставок: отбеливателем стирали в моей записной книжке записи про технические выставки + опрыскали пищу раствором спецхимии вызывающей синдром хронической усталости + снотворное в пище, напитках. Выставка Robotics Expo 2016: опрыскали еду сильным снотворным. 13 лет каждый раз когда я иду продавать мой мозг фирмам в технических выставках, государство опрыскивало мою еду раствором спецхимии вызывающую синдром хронической усталости, когда и 10 шагов сделать тяжело. Последние 4 года подмешивают в еду сильное снотворное перед выставкой.
2015г удалили часть ключевых фраз новых статей которые записываю в телефоне. Ликвидировали значительную часть дисков моей видеобиблиотеки научной фантастики; пропало много купленных, не прочитанных мной книг компьютерной, технической тематики. С компьютеров, с всех флешек удалили десятки картинок электродистанционных экзоскелетов.
2015г: с 2010г 2 раза удалили: добавка в воду охлаждающую двигатель сотых долей процента полиэтиленоксида втрое уменьшает расход топлива водяным насосом двигателя автомобиля.
Несколько лет назад удалили «декомпрессионный механизм запуска одноцилиндрового двигателя». Незаконно (пока был на работе) удалили с компьютера почти все видео про телеуправление андроидом.
6 раз за несколько месяцев заменили в сайте выражение «положительные эмоции» на «положительные эиоции» везде где речь о заповеди-2 Библии.
«Христианский принцип изначальной виновности человека» в десятках мест заменили на «принцип изначальной виновности». На подготовленной публикации в компьютере сделали это 40 раз.
3 раза за 4 года заменили описание изобретенного мной ультразвукового 2D-датчика скорости-вектора встречного потока вредительским текстом, чтоб убрать мой приоритет. При сохранении в админке сайта оказалась удалённой в интернет-линии фраза-1 описания: 2D-датчик вектора…
С моих технических статей здесь вырезают описания ключевых технических деталей, много раз удаляли способ повышения точности крупногабаритных манипуляторов через обратную связь привода с датчиками ускорения в захвате.
Международная выставка-конференция Robotics Expo в Москве в 2015г, 2016г, 2017г отказала в просьбе на доклад в теме «Костюм телеприсутствия». До 2015г конференция Robotics Expo в предыдущие годы длилась два дня с утра до вечера. В 2015г после просьбы к администрации Robotics Expo на доклад в теме «Костюм телеприсутствия», с конференции Robotics Expo из-за меня государство СРОЧНО УБРАЛО 2-й день конференции, ВЧЕТВЕРО СОКРАТИЛО суммарную длительность выступлений докладчиков конференции.
05.02.2015г: в yandex.ru по "экзоскелет" мой сайт edison1.livejournal.com/22102.html неделями был на 3-ем месте. Сегодня перескочил на 43 место!
2016г: выставка Robotics Expo 2016г: опрыскали еду сильным снотворным.
2017г: без конца вставляют статьи или слова которые я давно удалил. В статье 1) на 90% убрали деление на абзацы. Дважды убрали «Вариант-2» в «Вариант-2: предлагаю вместо вместо коробки передач большой маховик…» в F1.
Международный авиакосмический салон МАКС 2017г (выставку посещаю с 2005г): просил дать отгул в счет отпусков за 3 года для посещения аэрокосмической выставки МАКС 2017 19 июля, когда присутствуют инженеры (годами выяснял у них секреты технологий, которых нет в интернете, библиотеках). Отказали с угрозой увольнения в тот же день, хотя неоднократно ходил на сверхурочные в выходные дни! Я заменимый разнорабочий! Идти на МАКС 2017 в выходные дни когда на стендах вместо инженеров менеджеры нет смысла. 6 лет ждал разрешения посетить МАКС в день инженеров!
С моей бумажной записной книжки постоянно удаляли отбеливателем все записи про технические выставки. С телефона без конца удаляют все записи про технические выставки. Пропустил из-за этого десятки технических выставок с 2003г.
2018г после моей 4-й просьбы в администрацию Robotics Expo 2018 выступить с докладом «Костюм телеприсутствия» государство ликвидировало выставку Robotics Expo, включая 2018г. В 2009г, 2010г, 2011г, 2012г государство ликвидировало крупную высокоприбыльную платную (посетителей в разы больше Robotics Expo) международную (число стран в разы больше Robotics Expo) выставку «Робототехника» (ежегодно Москва 2004-2008г) из-за моих попыток в профессиональном смысле продать иностранцам мой мозг чемпиона мира по изобретательству, конструированию, искусственному интеллекту.
В всех выставках ни разу не смог сделать больше одного фото (мой телефон на выставках всегда блокирует государство) без перезагрузки телефона. Удалили с моего телефона программу записи видео, заблокировали диктофон.
Выставка Сколково Роботикс 2018 – применили спецхимию вызывающую сверхагрессивность: не столько беседовал с нужными мне людьми, сколько боролся против спецхимии. До этого чтоб не ходил на выставки, годами применяли спецхимию вызывающую синдром хронической усталости (тяжело ходить > 2мин) сначала двухнедельного, затем 18-часового действия.
После регистрации на конференцию РобоСектор-2018 мне письмом запретили приходить.
Силовикам России нужно чтоб у промышленной интеллектуальной собственности не было российских авторов и частных собственников, вся промышленная интеллектуальная собственность принадлежала классу силовиков как в СССР. Идущие с 2004г разные выставки робототехники с 2019г секретная инструкция принудительно заменила на выставки денежных мешков (офицеры спецслужб) для финансирования робототехники. С них сверху требуют госрегулирования робототехнического бизнеса, загнать робототехников как рабов божьих к рабовладельцам-силовикам (считают себя Богом). Вместо госзаказов частным фирмам, деньги будут идти только к силовикам. Надо защитить частные робототехнические фирмы от силовиков, их агентов-вредителей, агентов-провокаторов. Агенты вредители убили мои 4 фирмы.
В статье «Падение астероида» кто-то восстановил удаленные мной слова «ударная» чтоб дискредитировать как физика.
> 30 раз заменили в сайте слова «христианско-идеологическая» на «христианская идеологическая», 4 раза заменили бредом «рассогласование углов силовой обратной связи».
В F1 «нет бокового трения и износа поршня, цилиндра. КПД, мощность мотора выше на 12%, расход топлива меньше на 12%» 2 раза заменили на
«нет бокового трения и износа поршня, цилиндра, КПД. Мощность мотора выше на 12%, расход топлива меньше на 12%»
«коленвал – шатун – поршневой палец – каналы поршня» 2 раза заменили на
«коленвал – поршневой палец – каналы поршня»
В Энциклопедия для ИИ здесь (2 раза) и в androiduniversity.com заменили:
«Нет уточнения: определение слова универсально, обобщенно по умолчанию» на
«Нет уточнения: определение слова не универсально, не обобщенно по умолчанию»
2018г: потратил 16 часов разбивая на малые абзацы технический текст androiduniversity.com Полностью удалили (с сайтов, компьютеров) все абзацы.
Слова «аватар-андроид» 3 раза заменили на «аватар (андроид)»
Электронные письма на моё имя приходят с трехдневным опозданием.
2019г в статье «Философия галактических колонистов» слово «философия» 3 раза заменили на «идеология».
В статье 1) в АКТИВНАЯ 3D-ПОДВЕСКА 4-ый раз заменили текст на вредительский, все описания транзисторных муфт заменили вредительским текстом.
В статьях «ИИ андроида», «ИИ-поисковик» удалили часть текста.
10.2019г: добавили мне в соль раствор антиарина: с 2002г выбросил в мусор ~100кг сахара, соли.
В статье 1) примерно в 2010г вставил описание механизма балансировки оси-2 кардана костюма телеприсутствия: на концах обоих рогов полукольца оси-2 кардана двухрычажный механизм с противовесом на конце. Всё это удалили. Удалили информацию о преимуществах однодневного полета к Луне в «Промышленная лунная база».
2020г: несколько дней применяли спецхимию вызывающую сверхагрессивность за изобретенные мной изобретателем (профессия запрещена Евангелием) методы борьбы с Евангелием.
В статьях 1-3) дважды слова «андроид» везде заменили на «аватар».
04.2020г: в десятках статей исчезло деление на абзацы.
В моей Энциклопедия для ИИ, с моей страницы участника Википедии с определения слова «единоличник» убрали слова «…жилье, землю под ними», удалив следы правки в Википедии.
В сайте постоянно меняют слово «философия» на «идеология», «седло» на «велоседло», «специалист» на «менеджер», «стартовая генетическая программа» на «стартовая программа», заменяют смысл технического текста, переставляют местами текст, вырезают новые тематические абзацы.
2 раза в всем сайте мой термин «Спортивный список профессий» заменили на термин «Белый список профессий».
Обвинение против Евангелия заменили обвинением против Библии.
Переводы моих статей за несколько лет, часть оригиналов исчезли, заменили повторениями других оригиналов в ноутбуке.
Заменяют слово «пожарный» на «пожарник».
05.2020г: добавляют в соль (меняю каждый месяц) спецхимию вызывающую инвалидность от резких болей в позвоночнике. Эту спецхимию постоянно добавляли в соль в 2000-х.
07.2020-08.2020г опрыскивают раствором антиарина мою еду.
11.2020г опрыскивают раствором антиарина еду.
В сайте БОЛЬШИМИ или синими буквами – слова которые мне многократно удаляли, заменяли на другие.
2021г: бумажные книги заменяют книгами выброшенными мной в мусор 5-7 лет назад. В телефонной записной книжке 4 раза годами удаляли идею статьи СИГНАЛИЗАТОР СКОЛЬЖЕНИЯ СТУПНИ для костюма телеприсутствия.
С 2004г по 2021г вырезают с моих футболок под правой мышкой кусок ткани площадью 1,5-4 ладони чтоб не защил. Выбросил 12 футболок.
2021г: трижды удалили с телефона даты работы изобретательской выставки «Архимед» в Москве.
04.2021г: применили спецхимию вызывающую сверхагрессивность.
05.2021г: добавили в соль спецхимию вызывающую разрушение межпозвонковых хрящевых дисков (нагрузок на работе не было) с временной инвалидностью: эту спецхимию с 1980-х применили ~70 раз против меня.
06.2021г: опрыскали сахар раствором спецхимии разрушающей мозг.
07.2021г: опрыскали соль раствором антиарина. Энциклопедия для ИИ: Наука - ... фактов и логики, а не веры (А НЕ ВЕРЫ удалили).
2021г: «сила в тросе – транзисторная муфта»
заменили на:
«датчик ускорения троса – транзисторная муфта»
2021г: не дали отгул за свой счет или день с отпуска для выставки Международный авиакосмический салон МАКС 2021 в день для специалистов. Несмотря на то, что у меня были три неиспользованных месячных отпуска, оба начальника громко кричали – никуда ты не пойдешь, ФСБ не заинтересована чтоб ты ходил на выставки. Криками угрозы уволить в тот же день, если пойду на выставку.
2021г: в F1 вставили вредительскую фразу «точно дозируемой малой тормозной силой симулировать недостаточную поворачиваемость управляя автомобилем с задней центровкой».
Слова «рост кривизны поверхности барабана от износа» 3 раза заменили на
«рост кривизны поверхности барабана от нагрева».
2021г: 2 раза заменяли «Каждая телекамера показывает квадратный фрагмент лица» на «Каждая телекамера покажет свой 6-угольный фрагмент» в статье 1)..
В компьютере никогда не подключаемом к интернету, по заповеди-2 Библии 3-й раз удалили видео про межконтинентальную крылатую ракету «Буря» 1957г, 2-й раз удалили видео про фирму Pagani. Файлами поддерживал профессиональное вдохновение инженера. С 1970г госидеология Евангелие уничтожила сотни объектов вызывавших у меня профессиональное вдохновение инженера.
12.2021г: опрыскали сахар раствором спецхимии вызывающей резкие боли в костях.
01.2022г: опрыскали соль (через неделю сахар) раствором спецхимии вызывающей резкие боли в позвоночнике, опрыскали еду или напиток раствором спецхимии вызывающей сверхагрессивность.
01.2022г: в закрытой на ключ комнате заменили моё теплое одеяло толщиной 4мм на старое порезанное с дырками холодное одеяло толщиной 2мм с мусорки.
01.2022г заменяли слова «ТРЕХФАЗНЫЙ» на «3-ФАЗНЫЙ» (отключали от поисковиков).
04.2022г: после попыток в время отпуска связаться с корейскими корпорациями в «KOTRA», «KOTRA бизнес инкубатор» в Международном торговом центре, на следующий день при любой попытке ходить начиналась судорога с резкой болью в ноге. Длилось 4 дня: это уже в 6-й раз с 2005г спецхимия вызывающая судорогу ноги, полную инвалидность. Рабам думать запрещено (удалили), с этой целью 1920-х СССР скрещивал человека с обезьяной, потом цель перенесли на Армию, тюрьмы, дурдомы где от 7% до 12% это контрразведчики прикидывающиеся солдатами и зеками учатся подавлять народ за невыполнение идеологии Христа.
05.2022г: превратили в бред текст СОЦИАЛИЗМ КОММУНИЗМ.
06.2022г: начали опрыскивать мои продукты в общежитии снотворным: после работы ничего не успеваю сделать для моих технологий, постоянно не сплю вторую половину ночи. Сейчас выбрасываю продукты чтоб определить какие из них опрысканы раствором снотворного. В Армии последние две недели русский солдат регулярно вечером давал мне хлеб отравленный спецхимией!
07.2022г: сахар опрыскали раствором антиарина. Часть текста institutrobotov.ru/#7 заменена вредительским текстом.
08.2022г: опрыскали сахар раствором спецхимии вызывающей на 1,5ч сверхагрессивность.
11.2022г: 3-й раз заменили на нереальные цифры габариты костюма телеприсутствия. После публикации СПАСЕНИЕ ДУШИ У ХРИСТИАН выключили счетчики сайтов. 4-й раз изменили определение СОБОРНОСТЬ
12.2022г: на протяжении ~12 лет 5 раз вставили обратно в сайт мою неудачную фразу про Марс. Опрыскали еду раствором антиарина.
01.2023г соль опрыскали раствором спецхимии вызывающей судорогу ноги. В каждом шаге ноги резко сгибаются (падал на асфальт) от резких нервных импульсов в коленях. Уже в 7-й раз с 2005г. Последний раз этот вид спецхимии применяли 04.2022г
02.2023г: снова опрыскали еду раствором спецхимии вызывающей судорогу в ноге. Удалили текст про экзоперчатку в статье 1).
03.2023г: 5-й раз вставили в статью «Космический экзоскелет» мой неудачный текст про паротурбинный двигатель экзоскелета. 12-й раз текст статьи «3D-КАРДАН костюма телеприсутствия» заменили вредительским текстом.
04.2023г: удалили в компьютере все напоминания о выставке «Архимед 2023» – не попал на неё.
05.2023г: вырезали с одеваемой мной на работу футболки кусок ткани размером с две ладони под правой рукой.
06.2023г: в названии статьи – МОИ АЛГОРИТМЫ ХОДЬБЫ, БЕГА АНДРОИДОВ – 3-й раз удалили МОИ.
07.2023г: в статье ИЗОБРЕТАТЕЛЬ слова «ЕЖЕГОДНЫЕ ПОШЛИНЫ» заменили на «ЕЖЕГОДНЫЕ НАЛОГИ».
07.2023г: вредительство в МОИ АЛГОРИТМЫ ХОДЬБЫ, БЕГА АНДРОИДОВ
08.2023г: в «ПРОМЫШЛЕННАЯ ЛУННАЯ БАЗА» годами 4-й раз удаляют текст про строительство лунных шахт ракетами, бурящими глубокие шахты выхлопом ракетных двигателей.
08.2023г: в статье про ракету «графит + вода» снова заменили аргон на углекислый газ. В строке обновлений статей убрали номера статей «Жидкотопливные ракеты», «Теория экономики», «Христос – главный враг человечества»
09.2023г: соль опрыскали раствором спецхимии вызывающей судорогу ноги. В каждом шаге ноги резко сгибаются (падал на асфальт) от резких нервных импульсов в коленях. Уже в 9-й раз с 2005г. Последний раз это применяли 02.2023г
11.2023г: 5-й раз удалили описание привода оси-2 3D-кардана костюма телеприсутствия. На работе удалили с заметок в телефоне ключевую фразу описания новой конструкции 3D-кардана костюма телеприсутствия. Наполовину открутили почти все винты ноутбука, резьба сорвалась, двухлетний ноутбук начал рассыпаться, дорогой ремонт.
12.2023г: добавили в соль (меняю каждый месяц) спецхимию вызывающую инвалидность от резких болей в позвоночнике.
01.2024г: «ДВУХРЕЖИМНАЯ МУФТА СЦЕПЛЕНИЯ»: удалили описание противофазного режима работы приводов.
В начале сайта в абзац-2 из «отменой пошлины ОТЕЧЕСТВЕННЫМ изобретателям на личные патенты на изобретения» удалили слово «ОТЕЧЕСТВЕННЫМ».
02.2024г: Центр робототехники Сбербанка отказал мне в рабочем месте конструктора-робототехника. Это 23-й работодатель России отказавший в работе конструктора. Добавили в еду спецхимию дающую резкие боли позвоночника. Уничтожили смысл текста 3D-КАРДАН экзоскелета в костюме телеприсутствия. Вредительство в ГРУППОВОЙ ПРИВОД КОСТЮМА ТЕЛЕПРИСУТСТВИЯ.
03.2024г: вредительство в ГРУППОВОЙ ПРИВОД КОСТЮМА ТЕЛЕПРИСУТСТВИЯ.
04.2024г: 2-й раз удалили «Сила гравитации передается массе с скоростью света: гравитация не может ускорить фотон» в статье КРАСНОЕ СМЕЩЕНИЕ ЗВЕЗД.
3-й раз цветную кнопку «Транзисторная муфта сцепления» заменили на «Транзисторная муфта, привод».
В 2023г в статье 1).. я почти везде заменил слово «оператор» на слово «человек». 04.2024г кто-то обратно переименовал слова «человек» на слово «оператор». Вредительство в тексте о конструкции зажимных устройств костюма телеприсутствия. В ключевом фрагменте текста это уже в 4-й раз.
05.2024г: добавили в соль спецхимию - резкие боли в костях. Всегда через примерно неделю с стопроцентной вероятностью отравляют мою соль спецхимией.
06.2024г: вредительство в «ЭКЗОПЕРЧАТКА».
08.2024г: вредительство в «Групповой привод костюма телеприсутствия».
08.2024г: вредительство в «Модуль группового привода», «Рычажно-шарнирная система-РШ».
08.2024г: в статье 1).. мою фразу «руки (ноги) андроида соприкасаются на мгновение раньше рук (ног) человека» заменили на
«руки (ноги) человека соприкасаются на мгновение раньше рук (ног) андроида»
09.2024г: вредительство против текста про гироскопы туловища андроида в начале статьи 1)..
10.2024г: вредительство в ПАРАЛЛЕЛОГРАММНАЯ ПОДВЕСКА СТУПНИ АНДРОИДА и текста УСКОРЕНИЯ ТУЛОВИЩА АНДРОИДА в 1)..
11.2024г: вредительство в ПОДВОДНЫЕ, МЕЖКОНТИНЕНТАЛЬНЫЕ, ОРБИТАЛЬНЫЕ ПУШКИ
11.2024г: вредительство в ЭКЗОСКЕЛЕТ С ВОДЯНЫМ РЕАКТИВНЫМ РАНЦЕМ
01.2025г: вредительство в «Механизм уменьшения длины экзоскелета пальца»
01.2025г: вредительство в «Механизм уменьшения ширины экзоскелета пальца»
Добавили в еду спецхимию вызывающую сверхагрессивность. Эту спецхимию десятилетиями постоянно используют против меня с 1982г. В феврале 2025г эту спецхимию США успешно использовали против Канье Уэста чтоб отделить его от Илона Маска и его соцсети Х.
В самом низу этой страницы и в её индийской версии вредительство против моего текста «Продаю мозг в профессиональном смысле». В русской версии это 7-й раз.
03.2025г: вредительство в статьях ДИАПАЗОН РАССОГЛАСОВАНИЯ (НЕСОВПАДЕНИЯ) УГЛОВ, УСТАНОВКА ДЛИНЫ ЗАЖИМНОЙ РАМЫ ТУЛОВИЩА
03.2025г: вредительство в ПРИВОДЫ ТАКТИЛЬНОГО НАПЕРСТКА.
Переименовал все 3D-карданы запястья в 3D-шарниры запястья. Кто-то всё обратно переименовал
Вредительство в: АКТИВНАЯ 3D-ПОДВЕСКА, подвеска модуля группового привода
4-й раз заменили на нереальные цифры габариты костюма телеприсутствия.
Опрыскали сахар раствором спецхимии, вызывающей резкие боли в костях.
04.2025г: в индийской странице сайта в дробных числах точки я заменил запятыми. Заменили обратно на точки.
Опрыскали сахар раствором спецхимии, вызывающей резкие боли в костях
Вредительство в: АВТОМАТИЧЕСКАЯ РЕГУЛИРОВКА СОВМЕЩЕНИЯ ОСИ ВЕРХНЕГО СУСТАВА ЛОКТЯ ЧЕЛОВЕКА С ОСЬЮ ВЕРХНЕГО ШАРНИРА ЭКЗОСКЕЛЕТА ЛОКТЯ.
Вредительство в: АВТОМАТИЧЕСКАЯ РЕГУЛИРОВКА СОВМЕЩЕНИЯ ОСИ КОЛЕНА ЧЕЛОВЕКА С ОСЬЮ КОЛЕНА ЭКЗОСКЕЛЕТА НОГИ
04.2025г: опрыскали еду раствором спецхимии, вызывающей резкие боли в костях. Вредительство в статье РАСПОЗНАВАНИЕ ИЗОБРАЖЕНИЙ: АЛГОРИТМ ПАРАЛЛЕЛЕПИПЕД
05.2025г: в индийской странице сайта в дробных числах опять запятые заменили точками, в 5-значных цифрах добавили вредительские запятые
07.2025г: вредительство в статье про лобовое сопротивление торпеды «Шквал»
07.2025г: вредительство в ИНТЕРНЕТ-ТРАФИК КОСТЮМА ТЕЛЕПРИСУТСТВИЯ
08.2025г: везде уже 3-й раз слова «гамма и рентгеновские лучи сдувают электроны» заменили на «гамма-лучи сдувают...».
В тексте статьи АКТИВНАЯ 3D-ПОДВЕСКА ЭКЗОСКЕЛЕТА вредительство в описании силовой структуры активной 3D-подвески экзоскелета.
В описании экзоскелета пальца государство удалило весь текст про Привод тросовой тяги-ПТВ. Пришлось заново создавать весь текст.
08.2025г: в Всемирном архиве интернета исчезли первые версии сайта с упоминанием названия американской организации дающей гранты на разработку роботов в начале сайта. Я их ~8 раз скачивал с архива интернета с этим названием как память о первом, самом тяжелом годе сайта. Россия их удаляла с моих компьютеров через 3 дня. Теперь они удалены американцами с архива интернета, заменены более поздними, измененными версиями сайта.
В моем сайте под номером 1) всегда шла только статья про мой костюм телеприсутствия как главный текст сайта. Американцы в архиве интернете изменили текст моего сайта в первые годы, переставили местами разные участки текста с целью ухудшения восприятия сайта. С 2009г американцы вместе с выделенным красным цветом названием переставили в середину сайта большую часть статьи про костюм телеприсутствия. Версию сайта 2007г перенесли на 2009г. Аналогично передвинули в времени другие года сайта.
Похоже американским силовикам не понравилась моя критика пропаганды учебника коммунистов Евангелия и идола американских силовиков коммуниста Иисуса Христа, хотя сами полвека боролись с коммунистами и считают свою христианско-фундаменталистскую страну светской. Левые захватили силовые структуры в США – в всех христианских странах рано или поздно к власти неизбежно придут коммунисты: христианские страны – страны с коммунистической госидеологией Евангелие.
США – страна христианских фундаменталистов в глубинном государстве, сокращающих человечество до полумиллиарда христиан. Надеюсь всё же что Россия вместо Всемирного архива интернета подсунула мне фальшивые страницы. Подобное мне делали в 2000-х, когда в США мой сайт шел с вырезанным телефоном в начале сайта – за рубеж шла только фальшивая страница моего сайта от силовиков России. В 06.2010г силовики России заменили в моем сайте мой мобильный телефон на несуществующий.
После подтверждения замены моих сайтов на фальшивые подделки, готов быть свидетелем Международного Суда по вопросу замены Всемирным архивом интернета реальных копий сайтов на фальшивые американскими христианско-идеологическими силовиками (инквизиторы).
Учебник идеологических террористов Евангелие превращает силовиков в идиотов-вредителей. История христианских стран это бесконечное торжество идиотов-вредителей, 2 тысячи лет бесконечных непрерывных войн, цветных революции, сокращения человечества организуемых наследниками инквизиторов – идеологическими силовиками.
Свою историю вечных идиотов-вредителей христианские силовики всё время от стыда переписывают на фальшивую. Историю изобретателя Томаса Эдисона с Москвы переписывают на фальшивую.
09.2025г: новое вредительство в тексте статьи АКТИВНАЯ 3D-ПОДВЕСКА ЭКЗОСКЕЛЕТА (костюм телеприсутствия). Заново написал статью
09.2025г: крупномасштабное вредительство в тексте статьи УПРАВЛЕНИЕ МУФТАМИ СЦЕПЛЕНИЯ ГРУППОВОГО ПРИВОДА
09.2025г: вредительство в статье ВАРИАНТ-2 ПРИВОДА ОСЕЙ 3D-КАРДАНА
10.2025г: оказались удалены вредителями статьи ПОДВОДНЫЙ СВАРОЧНЫЙ АНДРОИД и СВАРОЧНЫЙ АНДРОИД
10.2025г: вредительство в статьях ИСКУССТВЕННЫЙ ИНТЕЛЛЕКТ АНДРОИДА и ИИ-ПОИСКОВИК
11.2025г: вредительство против статьи АНДРОИД-СОЛДАТ АЙЗЕК
11.2025г: «тазобедренный балансир с продольно-горизонтальной и вертикальной поворотными осями центра балансира» заменили на
«тазобедренный балансир с поперечно-горизонтальной и вертикальной поворотными осями центра балансира». Это 3-й случай замены продольной горизонтальной оси тазобедренного балансира на поперечную горизонтальную ось в описаниях балансира.
11.2025г: опрыскали еду раствором спецхимии вызывающей сверхагрессивность.
12.2025г: в ПРОМЫШЛЕННАЯ ЛУННАЯ БАЗА заменили мой текст на Выдыхаемый космонавтами газ образует над головой облака, пыль
12.2025г: многократное вредительство в статье про костюм телеприсутствия
01.2026г: «оптоволоконный датчик силы» заменили на
«оптоволоконный виброчастотный датчик силы»
«виброчастотный датчик силы» заменили на
«датчик силы»
01.2026г: в статье КОСТЮМ ТЕЛЕПРИСУТСТВИЯ СОСТОИТ ИЗ:
слова «модуль Активная 3D-подвеска экзоскелета» 2 раза заменили на
«модуль Активная подвеска экзоскелета». В 2-й раз замена от админки
01.2026г: в тексте сайта многократное вредительство в теме механической связи экзоскелета локтя с экзоскелетом предплечья
01.2026г: в сайте полностью уничтожена вся информация о механизмах совмещения осей суставов человека с осями шарниров экзоскелетов рук, ног. Заменили вредительским текстом. Сделали бессмысленным текст про автоматическую установку ствола пулемета в центре масс беспилотника
86) Вычислил заказчика агентурного биохимического террора против меня – это родственник матери чекист Магомед Магадов. Исполнитель моя мать. 1981г: приехал с Армии в отпуск. Спросил мать: обратный авиабилет? Мать сказала не надо, сама решит вопрос с билетом. Отпуск заканчивался – авиабилет мать не купила за то, что не пошел к контрразведчику Магадову. Спросил что делать, опоздаю с отпуска, откроют уголовное дело, все знают: я ненавижу госпредприятия, мечтаю о своем личной фирме.
Чекистская сука-мать ответила: она врач откроет мне больничный на 2 недели, если покажусь родственнику – контрразведчику Магаду Магадову. Я отказался: ненавидел семью Магадовых как сторонников ненавистного мне Социализма. После отказа мать сильно изменилась в лице, отвернулась точно так же как менялась в лице, отворачивалась всегда когда я заявлял: смысл всей моей жизни – работа инженера-конструктора. Поставила ультиматум: не пойдешь к Магаду, больничный делать не буду.
Я ответил: мое право никуда не ходить, ни с кем не разговаривать. Мне не нужны люди, цель моей жизни работа инженера-конструктора. Всю мою жизнь я трачу только на это. Я вечный домосед всю жизнь сидя дома занимаюсь конструированием, изготовлением моделей, никому жить не мешаю. Не поможешь, посадят в тюрьму как дезертира. Она угрожающим нарастающим тоном начала настаивать на своем. Затем отказалась разговаривать. Вопрос с авиабилетом удалось решить в военкомате.
В аэропорту Мурманска за отказ от контакта с контрразведчиком Магадом Магадовым задержал меня военный патруль под предлогом: до окончания отпуска у меня только 2 часа – неуважение к Армии. Объяснял: до Североморска 40мин на автобусе. Не желали разговаривать, арест на 3 часа. Вышел на свободу, рванулся к такси, нашел самого агрессивного таксиста, предложил все 40руб с условием оплаты после доставки к казарме без повторного ареста. Объяснил ситуацию, переплатил в 8 раз. Таксист заявил: не преступление.
Спецслужбы России проинструктировали патруль-2 на дороге в Североморск. Патруль-2 заявил: никуда ты козёл не поедешь! Опоздал на час, пойдешь на гаупвахту. Службу не уважаешь козёл! На тропу войны вышел таксист: козлами будете если из-за одного часа отправите солдата на неделю в гаупвахту. Война с патрулем длилась 2мин. Победу приватизировал таксист. Я запомнил врага народа контрразведчика Магада Магадова. Мать пыталась отправить меня в тюрьму за дезертирство в 1981г.
Потом этот враг народа Магад Магадов сдох. Контрразведчиком-начальником моей матери, новым участковым контрразведчиком стал его сын. Один из братьев-контрразведчиков Магомед Магадов часто приходил к моей матери в 1982г, когда против меня он с моей матерью применил самую опасную террористическую спецхимию контрразведки, чуть не превратившей меня в полного инвалида-дауна. Сильно подозреваю: у меня тогда мать сожгла террористической спецхимией часть моего мозга. У врага народа контрразведчика Магомеда Магадова фармацевтическое высшее образование.
Диссертации многих разделов фармацевтики гостайна. Фармацевтика на 50% наука агентурного биохимического террора против еретиков идеологии Евангелия. В интернет-архиве диссертаций самой крупной публичной библиотеки государства – РГБ фармацевтическая информация только по допуску к гостайне.
Старший брат Магомеда контрразведчик Сурхай Магадов провернул против меня операцию спецслужб чтоб не эмигрировал: из-за него я потерял 6-летние сбережения $600 на попытку эмиграции в 1998г в Италию (3 раза удалило государство).
В 2002-2004г в Москве из-за моих постоянных попыток бегства (они никогда не прекращались с 1994г) за рубеж, потерял трехлетние сбережения $800, получил сотни ударов по голове, в 2ч ночи когда спал сломали нос, многолетний агентурный биохимический террор, удары бутылкой водки по голове и тысячи прочих форм гостеррора страны дураков. Уничтожили в Москве часть моих моделей.
Не нарушая закон я обращался за помощью в изобретательской эмиграции в зарубежные организации из США, Южной Кореи, Германии, Англии, Канады чтоб в капиталистической (частная собственность на землю в городах) стране создать свою изобретательскую фирму на своей земле. По секретным инструкциям посольства христианских стран относятся враждебно к изобретателям
87)
ИНТЕРНЕТ-ЭНЦИКЛОПЕДИЯ (статье 5 раз вредили)
Статьи Идеальной энциклопедии надо оценивать в пределах фактов и неоспоримых логических следствий. В спорных случаях Судьи должны быть техническими экспертами если техническая статья; научными экспертами если научная статья; политическими экспертами если политическая статья. Статусы: «технический эксперт», «научный эксперт», «политический эксперт». Текст в котором тематические эксперты не пришли к коллегиальному мнению окрашивается в розовый цвет.
В Идеальной энциклопедии внизу страницы определения слова ссылка в Официальный список авторских страниц определений слова. Кто стоит выше в Официальном списке авторских страниц определений слова определяет голосование участников интернет-энциклопедии. Для каждого определения слова количество авторских страниц Официального списка голосованием определяют участники энциклопедии.
Авторскую страницу определения слова участники энциклопедии могут голосованием сделать главной страницей Идеальной энциклопедии по данному слову, сохраняя в ней право участников энциклопедии вносить правки.
Внизу каждой страницы определения слова с Официального списка есть ссылка в Неофициальный список авторских страниц определений слова. В Неофициальном списке сколько будет существовать данная авторская страница определений слова определяют Х участников энциклопедии. Число Х по голосованию.
Принципы определений технических понятий: цель объекта понятия; физическая, химическая, информационная структуры; ветви эволюции объекта понятия
ЭНЦИКЛОПЕДИИ:
1. АДМИНИСТРАТИВНАЯ ЭНЦИКЛОПЕДИЯ: удаляет оригинальные исследования: не соответствуют «авторитетным источникам». Участнику энциклопедии запрещено быть авторитетным источником. «Авторитетный источник»: информация созданная государством или частной организацией, освященной данным правом от государства. Презумпция виновности: обязанность доказывать несет обвиняемый в оригинальном исследовании
2. ЭКСПЕРТНАЯ ЭНЦИКЛОПЕДИЯ: удаляет не оригинальные исследования, а смысловые ошибки. Спорные вопросы: голосуют эксперты большинством голосов. Статус эксперт дают голосованием экспертов. В экспертной энциклопедии информация, название темы может быть оригинальным исследованием, если нет доказанных смысловых, вероятностных ошибок. Презумпция невиновности: обязанность доказывать несет обвинитель, не обвиняемый. Статус «тематической эксперт» можно заработать удачными статьями в своей странице участника. Если число визитов в страницу участника больше аналогичной статьи энциклопедии, тематические эксперты оценят соответствие участника статусу «тематический эксперт»
3. ГИБРИДНАЯ ЭНЦИКЛОПЕДИЯ: в части тем (политика, личности…) административная, в других экспертная
В Википедии цензура на научные факты не только в области климата: удалили исключительно важную для ученых и инженеров статью «Критика трехкомпонентной теории цветного зрения» с научными экспериментами противоречащими трехцветной теории цветного зрения.
Чтоб слово «технический» не усиливало класс инженеров, силовики секретными инструкциями однокорневое слово ТЕХНИЧЕСКИЙ принуждают заменять многокорневым ТЕХНОГЕННЫЙ: корень-2 – генезис (чьи гены у техники?). Скоро язык наполовину будет из новояза как у Джорджа Оруэла в «1984». Надо употреблять более древние, более простые слова с меньшим числом корней по принципу бритвы Оккама.
88)
ПРАВИЛА СРАВНЕНИЯ ТЕХНИКИ:
1. конструктор-А называет чем его техника-А сильнее техники-В
2. проверяют
3. конструктор-В называет чем его техника-В сильнее техники-А
4. это всё по второму кругу. Ещё разы по кругу пока эксперты не заявят чьи доводы сильнее
5. эксперты взаимно независимо раздельно голосуют чья техника лучше, не зная кто как проголосовал
ПРАВИЛА СРАВНЕНИЯ:
1. сравнивают лучшее с лучшим
2. побеждает то что образует лучшую систему при равных условиях
ПРИНЦИП ВЕСОВ:
В правой чаше весов плюсы варианта, в левой чаше минусы. Из всех вариантов лучше вариант максимальной положительной разницы правой, левой чаш
ПРИНЦИПЫ ТЕЛЕДЕБАТОВ: 1-е выступление – лимит времени по голосованию претендентов. Человек начавший говорить выключает таймер (как шахматные часы) раньше, чем истекут 3мин. Не успел: каждая секунда сверху = 2сек. Говорит после нажатия судьей кнопки «стоп» – каждая секунда послестопного времени = 3сек. Послестопное время > 1мин – временной штраф растет. Истек лимит времени – нет права говорить если судьи не дадут время
ФЕЙКАМИ В ИНТЕРНЕТЕ не являются утверждения, недостоверность или незаконность которых которых не доказали обвинители – презумпция невиновности. Утверждение не фейк, если указанная в утверждении вероятность истинности факта ~50% или не меньше чем у версии обвинителей. Объявление их фейками незаконная цензура нарушающая права человека. Факт нарушения может быть подтвержден экспертизой вероятности истинности информации по принципу презумпции невиновности источника информации.
ИЗОБРЕТАТЕЛЬ
Изобретатель – главная профессия человечества, способная решить практически любую проблему человечества. Изобретатель – профессия от которой ход мировой истории зависит в тысячи раз больше, чем от всех остальных профессий вместе взятых.
Зашита от труда, уединение, размышления в тиши закрытого от людей помещения – главные механизмы профессионально-интеллектуальной эволюции человека.
Уклонение от труда при достижении цели создало человека. Все созданное человеком – средства уменьшения труда в достижении цели: речь, дубина, каменный топор, копье, лук… Обезьяны которые изобрели каменный топор и глаголы стали 1-ми человеками.
Изобретатель – древнейшая (НЕ ПУТАТЬ!!!) чисто человеческая профессия. Уклонение от труда за счет изобретательства (изобретение средств уменьшения труда) превратило обезьяну в человека. Обезьяна создала человека по своему образу и подобию. Человек – тюнингованная обезьяна. Деньги, речь – величайшие изобретения человечества.
Внедрение не функция изобретателя. Функция изобретателя изобрести. Внедряют покупатели лицензии на патент. Надо уважать право на разделение труда: изобретатель изобретает, внедряет инженер.
Человека создало уклонение от труда при эмоционально ярком стремлении к достижению цели. Интеллект: способность уклоняться от труда при достижении цели, способность создавать технологии уклонения от труда. Интеллект: способность создавать, а не знать. Чем меньше знаний человечества использовано, проще достигнута цель – тем сильнее интеллект.
Одинаковы по конструкции товары одного типа, диапазона цен – это менеджеры корпораций отняли у конструкторов профправа для стабильности рынка. Кто хочет слишком много стабильности, безопасности потеряет то и другое.
Научно-технический прогресс ускорили латинский алфавит, римское право, книгопечатание. Христиане уничтожив древнегреческие и древнеримские библиотеки поняли смысл науки техники после побед монголов, побеждавших крепости осадной техникой китайских инженеров. Ускорение развития науки приходится на 14-15 век – монголы в 13 веке подстегнули прогресс как форму усиления государств.
Соотношение сил между малочисленными высокоорганизованными скотоводами и многочисленными плохо организованными континентальными земледельцами изменили библиотеки (включая личные), университеты. Свободный доступ граждан к информации в библиотеках – двигатель эволюции науки, техники. Недостаток организованности континентальные земледельцы компенсировали превосходством военной техники.
Бизнесу, капиталистам надо чтоб на планете не было наций и религий, язык и правила игры одинаковы.
Спутники импульсным инфракрасным светом синхронизированным через диалоговый криптокод с тепловизорами, осветят территория военной операции.
Промышленными предприятиями должны управлять работающие по своей специальности инженеры. Менеджеры должны им подчиняться выполняя тактические задачи. В уставе предприятия у управляющего инженера должно быть право запрета любого решения менеджера. Инженера в отличие от менеджера больше интересует инженерное совершенство, общественный престиж товара, слава предприятия. Инженером профессионально-генетически управляет мания профессионального величия, а менеджером деньги. Профессиональное величие инженера соответствует интересам гражданского общества и страны, жадность менеджеров нет.
Компьютер не ускорит работу конструктора, если используют только эскизы скорой руки или чертеж делает чертежник по эскизу. Если конструктор работает добросовестно тогда 99% времени у него уходит не на чертежи, а на упрощение, удешевление в своем воображении конструкции товара с учетом эксплуатации. Например: сделать товар в основном из повторяющихся элементов, упростить сборку, разборку товара, выкинуть с конструкции максимальное количество деталей.
Суммы профессиональной и непрофессиональной напряженности на работе постоянна. Рост непрофессиональной напряженности ухудшает профессиональную результативность.
Если вместо 100% стандартного по Закону ресурса товар отслужил X% – производитель доплатит налог за разницу ресурса.
Объявление принадлежности объектов (субъектов) всему обществу означает их национализацию – стали собственностью класса силовиков.
Окраска общественного транспорта продольными полосами другого цвета уничтожает цельность, индивидуальность образа автобуса – в данной стране нет равноправия, людей принудительно подгоняют под идеологические стандарты. Уничтожение цельности образа, индивидуальности публичных мобильных технических объектов – угроза обществу на языке интуиции о запрете равноправия. Угрозы на языке интуиции преподают закрытые вузы силовиков.
Миром правит сила, не деньги. Деньги – эквивалент труда. Есть бесконечное число способов уничтожать труд. Труд может уничтожать военная сила. Ещё лучше уничтожают труд изобретатели, за что их блокируют враги изобретателей – христиане.
Количественный признак пользы человечеству – годовой оборот на мировом рынке товаров, в которых используют работы этого человека. По этому признаку лучший физик всех времен и народов Майкл Фарадей. Он в пятерке лучших химиков всех времен и народов.
В природе все функционально эволюционирует от простого к сложному. Когда внешняя среда не подталкивает к функциональной эволюции все естественное по материальной, информационной структуре эволюционирует от сложного к простому.
В времена тиранозавров давление атмосферы Земли было ~20атм: видно по размерам легких тираннозавра. Ежедневная потеря Землей 90т атмосферы уменьшила размеры птиц, животных, рептилий, насекомых.
Экономика более развита в северных странах. Для интеллектуального развития необходимы размышления в одиночестве в своей комнате. Плохая погода загоняет людей в одиночество в своей комнате. Южане больше общаются. Общение задерживает интеллектуальное развитие, чем пользуются спецслужбы для остановки эволюции людей через агентов-тормозов. Агенты-тормозы общением промывают мозги опекаемых от аналитических мыслей. Северная погода спасает от агентов.
1 плохая весть важнее 1000 хороших. Вести хорошие – беспокоиться не надо, плохая – подготовка к угрозе.
Для мужчин жизнь больше спорт чем театральная игра, у женщин наоборот.
Чем севернее сделано фото тем непрозрачнее воздух. Среднегодовая температура Земли растет от замедления вращения планеты от роста расстояния Земля – Луна. Дольше день – равномернее греется атмосфера – слабее восходящие потоки воздуха – меньше конвекционная теплопроводность атмосферы – меньше инфракрасных лучей на единицу поверхности излучает в космос планета. Радар HAARP раскачивая электронные орбиты молекул ионизирует воздух – ближе к поверхности Земли зона перехода энергии солнечного ветра, космических лучей в теплоэнергию воздуха; меньше энергии вернется в Космос инфракрасными лучами. Заказанные христианскими идеологами для роста оплачиваемого труда теория парникового эффекта, «экологические» законы 3-кратно увеличили энергопотребление промышленности.
Запретить частные банки не являющихся частью предприятия сферы производства или услуг. Годовой оборот частного банка не должен превышать среднегодовую прибыль в сфере производства.
Интуитивное ожидание, факты не требуют веры.
Религиозные публичные постройки законом должно быть разрешено только при арендовании этой земли у государства. Нет юридической силы в ритуалах негосударственных организаций, ограничивающих власть над человеком законов государства.
Народ имеет правительство которого заслуживает – преступный лозунг христиан по принципу изначальной виновности человека по Христу. Человек родившийся в тоталитарном государстве не может быть виновным перед обществом. Государство не воплощение общества, а жертва идеологических вирусов типа Библии, Корана, Маркса. Ответственность за действия вирусов несут их сочинители, те кто их внедряет, а не жертвы.
Христианские страны для сокращения человечества принесли в Шри Ланка запрет фермерам промышленных удобрений – в стране начался голод.
В каменном веке каждое племя имело свои язык, идолов: в Папуа Новой Гвинее 850 языков племен каменного века, сотни идолов. Религии создавал класс силовиков (вождь племени, его придворная банда) ещё с каменного века.
Фильмы «Прометей», «Чужой завет» готовят мир к запрету христианами автономных разумных андроидов чтоб нехристианские страны не колонизовали планеты звезд андроидами перед заселением человека.
7 раз уламывал промышленную самку ЗИЛ на промышленный секс с мной – племенным промышленным самцом планеты. Она 7 раз послала меня подальше. Жаль! Надеялся: промышленная самка ЗИЛ родит по моим чертежам лучшие в мире внедорожник, грузовик, автобус! Промышленная самка АвтоВАЗ послала меня, племенного промышленного самца планеты, по тому же адресу 15 раз после 15 (конструкторские отделы за 2 поездки в г.Тольятти) моих предложений.
Все маршруты общественного транспорта делать прямолинейными квадратно-гнездовым способом. До любой точки ехать вначале по одной прямой линии, затем пересев на перпендикулярную прямую линию. Чтоб быстро найти адрес улицы пронумерованы: 55-я южная улица, 55-я восточная улица. Масштаб воровства властей городов – по проценту территории с плитками размером < 30см – меньше размеры плитки – больше человеко-часов – больше денег украдут.
Дагестан: с 1992г все мечети построены офицерами местных спецслужб на «свои личные» (рэкет) деньги. Никому кроме силовиков религия не нужна.
1983г государство применило против меня спецхимию вызывающую инсульт. За ~10мин сильно выросло давление крови мозга. На остальные участки тела спецхимия не влияла. Настроил мозг на нулевое напряжение, максимальное расширение всех кровеносных сосудов мозга, а тело на минимальное потребление кислорода чтоб снизить давление. 2 часа ждал пока давление вызванное спецхимией, не разрушит какой нибудь сосуд. Через 2ч давление начало снижаться, за ~40мин пришло в норму. Ничего подобного в жизни никогда не было. Уверен в статистике треть инсультов (разрыв кровеносного сосуда мозга) от агентурной спецхимии. Этот вид карательной спецхимии против меня больше не применяли. Заменили на другие из 11 видов спецхимии
Массовые убийства: мою мать-врача спрашивали: пенсионный возраст, почему работаешь. Её ответ: знаю по свидетельствам знакомых врачей из больниц, поликлиник: через 3 года после ухода с работы на пенсию почти все умирают. Не хочу умирать! Понял: государство не хочет платить пенсии.
По ужасу в её словах про 3 года, по ответам на мои вопросы по этой теме я восстановил картину: врачами в разрешено работать только марионеткам спецслужб, она сама чекистская сука участвовала в массовых убийствах пенсионеров для присвоения их пенсионных денег (22% от зарплаты) классом силовиков. По секретным инструкциям врачи обязаны назначать гражданам в поликлиниках и больницах через 3 года после их ухода на пенсию, сочетания лекарств вызывающие быструю смерть пенсионеров. Моя мать чекистская сука полвека участвовала в массовых убийствах пенсионеров по чекистской секретной инструкции, а как пришел её черёд принудительно сдохнуть сразу сука включила задний ход. Будьте прокляты врачи России!
Государство применяет агентурную спецхимию для убийств пенсионеров. Знакомого заточника Толика Воробьева за месяц до его ухода на пенсию я предупредил про эти 3 года. Через 3 года пришел душевный знакомый, вынул бутылку водки: Воробьев выпил, умер через полчаса остановка сердца. Знакомый (антидот) вызвал скорую. Чердаков – начальник (выглядел моложе, живее своих лет) прессово-сварочного корпуса завода ЗИЛ где я работал, умер через 3 года после выхода на пенсию.
3 раза удаляли: государство по закону выдавало рабочим вместо доплаты денег за вредную профессию 1 литр молока 2 раза в неделю. В автозаводе ЗИЛ 2009-2010г в молоко государство годами добавляло спецхимию вызывающую синдром хронической усталости на 18 часов. Я 11 лет работал на вредной профессии заточника, получал это отравленное силовиками молоко. С 2009г всегда после обеда с молоком на работе терял на 18 часов работоспособность от тяжелой усталости. 2010г нашел причину, заменил заводское молоко на молоко с рынка – усталость исчезла.
Придумал как снять нагрузку сердца человека в тяжелых стрессах: больше пить воду чтоб кровь стала более жидкой, легче прокачивалась в кровеносных сосудах. Больше употреблять с водой энергоносителя мозга – сахара, если нет легкой тошноты. Мозг работает на глюкозе
Христиане борются с сахаром:
Причина-1: сахар – топливо мозга. Замена сахара на сахарозаменитель или нехватка сахара вызывают инсульт при стрессе – давление крови растет, расширяются кровеносные сосуды мозга для доставки сахара, которого нет. Постоянно находиться в расширенном состоянии кровеносные сосуды не могут: сосуды рвутся от повышенного давления – инсульт. Без сахара мозг необратимо умирает за 5мин. Силовики христианских стран борьбой с сахаром сокращают число пенсионеров, деньгами Пенсионного фонда создавая паразитические рабочие места силовиков и госслужащих для родственников и секс-партнеров силовиков.
Причина-2: сахар консервант: долгохранимые еда, напитки уменьшают налоги с селького хозяйства.
Причина-3: сахар 10 раз дешевле мяса, масла… – меньше получат налогов.
Причина-4: борьбой с сахаром христианские страны снижают продажи газированных напитков: молодые перейдут на алкогольные напитки – больше сбор налогов, меньше становится людей напрягающих мозги (умирают от инсультов).
Причина-5: сахар ускоритель работы мозга: рабу Евангелия запрещено думать.
Холестерин – 33% сухой массы мозга.
Минздрав – самая опасная силовая структура, совершающая в мирное время по приказу сверху в десятки раз больше умышленных убийств (убийство народа через 3 года после выхода на пенсию для национализации пенсий) и тяжких телесных повреждений, чем остальные силовые структуры вместе взятые.
Для военной безопасности государства или для лунной базы надо употреблять пищу с максимумом сахара, соли – консервантов позволяющих годами хранить пищу на складах без холодильника: 5-10 раз снизит цены на еду
89) (статье 4 раза вредили) Теплообменник: кубик аэрогеля с гранью 2,5см: внутренняя площадь как у футбольного поля.
Удельная теплоемкость углерод-углеродных композитов растет от 227°С до 2027°С с 0,8 до 2,2кДж/кг на градус. Дальше не растет. Прочность на растяжение, сжатие растет до 2227°С. Теплопроводность уменьшается до 1027°С, затем до 3027°С ещё на 30-40%. Выше 1370°С модуль упругости уменьшается
Прочность графита при 2000°C три раза больше, при 3000°C два раза больше. Прочность горячего карбида бора в 1,6 раз, теплопроводность в 1,5 раза выше, чем у графита
Теплота парообразования углерода 12000ккал/кг
Максимальная электропроводность графита 600°С
При облучении графита модуль упругости, твердость, теплопроводность больше в 20 раз
Углерод-13 = сильное резонансное поглощение электромагнитных волн 1-100МГц за счет ядерно-магнитного резонанса
Перпендикулярно слоям пирографит теплоизолятор, электроизолятор. Вдоль слоев наоборот. Разница в 500 раз. Пирографит = 2500°С + 50МПа
Карбиды титана, циркония, гафния хорошо проводят ток
Медь не реагирует с H, C, N даже при высоких температурах
С и В композиты = жесткость 5 раз больше, чем у Al сплавов. У углеволокнитов прочность в 4 раза больше чем у Al сплавов + на 40% меньше плотность
70% марганца + 30% меди = бесшумный сплав. Может намагничиваться
1кг карбона = $20, сталь менее $1. Zylon (зайлон) держит 591кг/мм2, карбон 250-500кг/мм2, сталь 30ХГСА 170кг/мм2. Зайлон 2 раза крепче кевлара, начинает разлагаться при температуре > 780°С. Боится ультрафиолета: нужна защита. При понижении температуры зайлона процесс его расширения идет вплоть до минус -240°С
Удельная прочность при сжатии боропластика 4,3 раза больше углепластика, удельная прочность на сдвиг 3 раза больше углепластика, удельная прочность на расстяжение на 10% больше углепластика. 1966г: внедрение борных волокон
Титановые сплавы 4 раза прочнее алюминиевых, тяжелей 1,7 раз
Пеностекло 4 раза легче воды
В углекислом газе горят литий, натрий, калий, кальций, марганец, магний, оксид талия, оксид натрия, титан, барий, цирконий, диборан B2H6, фосфор, смесь сульфата натрия и графита, смесь хлората калия и цинка, смесь силиката кальция и красного фосфора, смесь нитрата серебра и графита; гидриды, алюмогидриды, боргидриды щелочноземельных металлов. Карбиды щелочных металлов самовоспламеняются в углекислом газе. Алюминий вспыхивает, горит в броме. В азоте горят титан, магний, бор, литий, диборан
Наибольший удельный импульс у гибридного ракетного топлива: твердый гидрид бериллия + перекись водорода: BeH2+H2O2 = BeO+2H2
N2О хорошо растворяется в H2O
4-96% водорода в воздухе: взрыв
Литиевый аккумулятор 400Вт/кг, керосин 12500 Вт/кг.
Сплав ТАЛИЙ + РТУТЬ жидкий до минус -61°C. Сплав Na + K жидкий до минус -12°C
Растворение в воде КОН = 13000кал/моль. Растворение в воде Nа2CO3 = 22000кал/моль
Растворение алюминия, магния в изопропиловом спирте: варим порошок Al или Mg в спирте
ЭЛЕКТРОПРОВОДНОСТЬ НА ЕДИНИЦУ ВЕСА: 1. Натрий (8 раз дешевле меди) на 73% больше алюминия (Al). 2. Литий на 66%. 3. Калий на 30% лучше. 4. Бериллий на 23% лучше Al. 5. Кальций на 14%. 6. Магний на 11%
Сплав ниобия с 20% меди: высокая электропроводность, вдвое твёрже прочнее чистой меди
Сплав ЦИРКОНИЙ + МЕДЬ: высокие прочность, проводимость
Силовые кабеля: сплавы щелочных металлов, их соединения с углеродом
ИТТРИЙ резко повышает проводимость алюминия, прочность керамики. Иттрий – тепловое покрытие реактивных двигателей: защита металлов от жары
Карбид титана хорошо проводит ток
Нагретый ниобий активно поглощает азот c воздуха становясь хрупким.
Твердые смазки: MoS2, WS2, TiS2, PbS, CdS, селенид W, PbO, Pb, PbJ2, AgJ, Cu, Zn, BN, CaCl2, CdCl2, Na2B4O7, Ag2SO4… Нитрид бора по смазочным свойствам лучше MoS2 и C. Трение BN снижается с ростом температуры
Сплавы РЕНИЙ + КОБАЛЬТ: малый коэфф. трения при высоких температурах в вакууме. Самые износостойкие оси из рения. Рений 2-й по твердости метал после осьмия. Прочность рения при температуре до 1200°C выше вольфрама, значительно выше молибдена
Лучший материал нагруженных растяжек: Mo + 50% Re – нить диаметром в 3 раза тоньше волоса держит 7кг
Рений единственный тугоплавкий метал не образующий карбидов
Сплав рений + вольфрам: термопара диапазона 0-2500°C
Рениевые сплавы незаменимы для пружин для температур до 2000°C
0,5% бериллия в сталь – пружины упругие до температуры красного каления, выдерживают миллиарды циклов нагрузки (стальные 800000)
TaB2 плавится 3200°C, износостойкий
Пары цезия (рубидия) пропушенные через раскаленную платиновую сетку = поток ионов цезия (рубидия)
LiCl уменьшает электросопротвление в сотни раз при изменении относительной влажности воздуха
Электропроводность пластинки тетрахлорида циркония меняется от давления: меряют давление от стотысячных долей атмосферы до тысяч атмосфер
Моносульфид самария один из лучших тензочувствительных используемых материалов для датчика силы, термоэлектрический КПД ~50%.
Ультрафиолет 165мМк или рентген разлагают воду
При 2000°C вода понемногу разлагается, при 2200°C разлагается 3% воды, при 3000°C 50%, при 5000°C 100%
РЕДКОЗЕМЕЛЬНЫЕ МЕТАЛЛЫ: не покрывается льдом авиастекло покрытое тонким слоем олова с оксидом индия. На лобовое стекло истребителей, скафандров магнетроном нанесено многофункциональное покрытие: золото + сплав индия с оловом
Подшипники покрытые индием служат 5 раз больше. Зеркало покрытое индием отражает лучше серебра, не искажает цвета, не тускнеет. Добавление индия к золоту или платине увеличивает их твёрдость. Некоторые детали самолетов из сплавов индия: не вступает в реакцию с кислородом, не изнашивается. Сплав 24% индия и 76% галлия жидкий при комнатной температуре.
Соли Zr: водоотталкивающие свойства. Zr пластичный, легко поддается холодной, горячей обработке
Сильно нагретый ZrO2 излучает свет очень интенсивно. Для изготовления калильных сеток требовалось почти 100 раз больше оксида тория, чем оксида церия. Иттрий – тепловое покрытие реактивных двигателей: защита металлов от жары. Лютеций используют в импульсных ракетных двигателях
Из ZrO2 (плавится 2680°С) делают керамические подшипники
Высокотемпературные топливные элементы на основе оксидов Zr, иттрия повышают КПД тепловых электростанций с 35% до 60%
Термоэлектрический материал из тантала, железа и сурьмы – производительность 11,4%: материал дает 11,4Вт электричества на каждые 100Вт потребляемого тепла
Моносульфид самария термоэлектрический КПД ~50%, один из лучших тензочувствительных используемых материалов для датчика силы. Молибдат САМАРИЯ, манганат САМАРИЯ имеют гигантский магнитокалорический эффект, можно использовать магнитным холодильником. Оксид САМАРИЯ добавляют в стёкла – поглощают инфракрасные лучи
Порошок сплава НИКЕЛЬ + КАДМИЙ (магнитотепловой эффект: при намагничивании разогреваются, при размагничивании охлаждаются) за 1 цикл охлаждает пропущенный через него газ на 10°С. КПД 60%. На 40% дешевле аналогов.
Соли гадолиния охлаждаются при размагничивании
Теллур + висмут = охлаждает на 72°C
Теллур + вольфрам: ферроэлектрик (диэлектрик и метал)
Магнитострикция не зависит от знака магнитного поля. TbFe2, Yco5, PrСо5… гигантская магнитострикция, огромная индукция насыщения 10–20Тл: плотность магнитной энергии близка к плотности химической энергии тротила
Неодим: магниты в жестком диске, звуковом динамике, беспроводных электроинструментах, моторах электромобилей
Европий ($2000 1кг) красный люминофор ЖК-дисплеев, альтернатив нет. Эрбий ($1000 1кг) лазерный усилитель в оптоволоконном кабеле, альтернатив, заменителя нет. Ультрафиолетовые линзы: кварц, флюорит, фтористый литий. Инфракрасные линзы: особые сорта стекла, кремний, германий, фтористый литий, йодистый цезий
Фотохромные материалы: реакция 10 в минус шестой степени секунды.
Рентгеновский датчик: йодид цезия осажденный на кремниевый фотодиод. Или кристаллы йодида натрия активированные таллием NaJ(TI) – кристалл активируют таллием для дополнительных энергетических уровней – высокая эффективность поглощения гамма и рентгена, высокий световыход, хорошее энергоразрешение, достаточно короткое время высвечивания. Кристалл светится в рентгеновских лучах красивым синим светом, длина волны ~415 нм
Удар электронов 20Мэв по танталу дает сильный гамма-луч
Царская водка при кипении не справится с рутением. 0,1% рутения: рост коррозионной стойкости титана. Сплав платина-рутений – чрезвычайно износостойкие электроконтакты. Рутений катализатор многих химреакций, катализатор систем очистки воды орбитальных станций
Церий содержащие стекла не тускнеют от радиации. У термостабилизированных кварцевых резонаторов расхождение 0,007сек за 1,5-2ч. У миниатюрных атомных часов недели
Молнии: ОЧЕРЁДНОСТЬ прихода электромагнитных волн: гамма-излучения, рентгеновские, ультрафиолетовые, фиолетовые, ... жёлтые, оранжевые, красные, инфракрасные
УМЕНЬШАЮТ ОБЪЕМ ПРИ НАГРЕВЕ сплавы ЖЕЛЕЗО + ПЛАТИНА, ЖЕЛЕЗО + НИКЕЛЬ + КОБАЛЬТ. Фосфаты циркония и ванадия при нагревании до температуры 800-900°C плавно сжимаются
Двумерная разновидность карбида титана (TiC) толщиной в десятки нанометров имеет высокую проводимость, можно использовать как антенну. MAGNAV - система навигации по магнитному полю Земли. Его напряженность меняется в зависимости от местоположения. По показаниям датчиков и магнитной карте координаты с точностью до 10м
Самый термостабильный материал в мире – сплав скандия, алюминия, вольфрама и кислорода Sc1.5Al0.5W3O12 – идеальный материал аэрокосмической техники работающий в условиях сверхвысоких температурных перепадов. У него нулевое тепловое расширение. Объем практически неизменен в диапазоне температур от –269°С до 1126°С
НИТРИД БОРА BN: очень высокое удельное сопротивление при высоких температурах (1900 Ом.см при 2002°С): теплоизоляция индукционных печей; можно использовать как жаростойкую смазку благодаря чешуйчатой (графитовой) структуре.
BN плавится при 3000°C.
Трение BN снижается при росте температуры. Нитрид бора по смазочным свойствам лучше MoS2 и C.
Нитрид бора имеет алмазную и графитоподобную модификации кристаллической решетки. Обе твердая смазка. Графитоподобная – намного более скользкая чем графит, 1кг 15000руб, идеально работает до температуры 2000°С. Алмазоподобная – боразоновые токарные резцы режут на токарном станке холодную закаленную сталь на сверхвысоких скоростях при температуре 2000°С.
У кубического BN теплопроводность больше Cu.
Алмаз 5 раз теплопроводнее серебра, скорость звука 12000-18350м/сек, скорость света 125000 км/сек. Алмаз без изотопа 13С имеет теплопроводность на 50% больше. Скорость звука жидкого гелия 3,4м/с. В некоторых полимер-электретах после зарядки падает скорость звука.
Надписи на алмазе: типографским способом наносят рисунок из никеля, нагрев: через 15мин алмаз с надписью. Алмазный углерод растворяется в железе (кобальте, никеле, платине) причем лучше при 1000°C. Расплавленный марганец растворяет алмаз
Возможно карбид платины превосходит алмаз по твердости
БОР – самый высокий предел прочности на разрыв 5,7Гпа. По твердости уступает только алмазу, нитриду бора, карбиду бора, сплаву бор-углерод-кремний, карбиду скандия-титана. Широкозонный полупроводник.
Бороуглерод = автоклав + 1000°С + метан + BCl3 (хлорид бора). В4С = В + С + 1300°С.
Нитрид кремния: плотность 2,5...3,44 г/см³ против 7,8 г/см³ у стали, больше температура плавления, низкий коэффициент теплового расширения, высокая ударная вязкость, высокая химическая стойкость, низкая теплопроводность, предел прочности при сжатии 1400...2150МПа.
ЗОЛОТО: отношение коэффициента поглощения солнечного излучения золота к коэффициенту излучения 10,77 при 27°С. У алюминия – 14,35. Золото, полированный алюминий поднимают температуру покрытого им объекта. С помощью покрытий из золота спасают от замерзания (микроэлектроника, аккумуляторы…) космические аппараты. Если космический аппарат летит близко к Солнцу, его защищают от жары покрытием из анодированного алюминия (отношение поглощения к излучению 0,19), белого диоксида титана (отношение поглощения к излучению 0,20) или материала Rockide A (отношение поглощения к излучению 0,20). Золото отражает до 99% инфракрасных волн.
Начало инфракрасного диапазона: коэфф.отражения золота 99,4%, серебро 97%, алюминий 85%, сталь 61%.
Золотое покрытие защищает металлы от H2
Золото растворяют: хлорная вода (медленно комнатная t°С); растворы цианидов щелочных металлов, продуваемых воздухом. Золото растворяет раствор иода и иодида тетраэтиламмония в ацетонитриле при 82°C. После охлаждения золото в осадке. Золото, платину растворяет нагретая смесь азотной, хлорной кислот. Золото растворяет смесь серной, азотной кислот. Золото растворяет смесь поваренной соли и азотной кислоты. Золото растворяет селеновая кислота H2SeO3. Золото растворяет фтороводород + фторид криптона HF + KrF2. Золото растворяет фторид хлора ClF3 или фторид брома BrF3, или жидкий бром.
Обработка золотой пудры высоковольтными электроразрядами в кислороде = оксид золота: фиолетовый порошок. Обработка в автоклаве золотой пудры горячей смесью кислород + озон = оксид золота: фиолетовый порошок. Оксид золота нерастворим в воде, в серной, азотной кислотах, реагирует с соляной кислотой. Оксид золота немагнитен, не проводит ток: аэродромные электромагнитные рамки не реагируют. При 200°C превращается в золото, выделяя кислород.
Электретный микрофон с зарядом от бета-излучения: тонкий слой обратной стороны электрода дает 0,01-100 микрокюри.
Кюрий-242 полураспад 163 суток: альфа-частицы. Удельная тепловая мощность 122вт/г. Генератор 3-6 месяцев. Дешевле полония-210. Реальная критическая масса: 235U уран – 10кг, 233U уран – 5кг, 239Pu плутоний – 2,8кг (шар диаметр~6см), 237Np нептуний – 18кг, 252Cf калифорний – 17грамм.
Газовая центрифуга обогащающая уран: более 1500об/сек не останавливаясь 30 лет (рекорд 32). Выключенная вращается по инерции 2 месяца
ПОДВОДНЫЙ ФАКЕЛ: нитрат бария 32%, сульфат бария 40%, магний 16%, алюминий 12%. Связующие подводного факела на 100% состава 8% льняного масла, 1% оксида марганца. Проценты вроде по объему
КУМУЛЯТИВНЫЙ ЗАРЯД в котором медный конус заменен бериллиевым, выстреливает бериллиевую струю 25км/сек.
Снаряд летящий попутно вращению Земли на Восток с скоростью 2,5км/с, теряет 20% веса от центробежной силы движения вокруг Земли
ТОРПЕДЫ:
1950-е: пассивные головки самонаведения
1960-е: активные высокочастотные головки самонаведения
1960-1970-е: низкочастотные активно-пассивные головки самонаведения с доплеровской обработкой
1970-1980-е: вторичная цифровая обработка (классификатор), переход тяжелых торпед на проводное телеуправление
1990-е: цифровые головки самонаведения с большим частотным диапазоном
Сегодня: сверхширокополосные головки самонаведения с оптоволоконным телеуправлением.
Торпед однокомпонентное топливо: пропиленгликоля динитрат (он же 1,2-пропандиол динитрат) стабилизированный 2-нитродифениламином и десенсибилизированный (потеря чувствительности к детонации) дибутилсебакатом. Они вступают в реакцию между собой при испарении и нагревании. Стартовый пороховой заряд нагревает топливо: газы сгорают в цилиндрах аксиально-поршневого двигателя. Скорость 50 узлов на 50км.
Кавитация воды за 0,00001сек 10000°C
Вода замерзает при +20°С, если в ней метан.
ПОДЛОДКИ:
1960-е: выбор параметров фундаментов, резинометаллические амортизаторы, гидроакустические покрытия, бескавитационные винты.
1970-е: малошумн.вентиляторы, насосы; сильфоны в трубах, низкочастотное гидроакустическое покрытие, низкооборотные малошумные винты.
1980-е: агрегатная сборка, пневмоамортизация, пьезостабильное гидроакустическое покрытие, саблевидные винты (7 лопастей диаметром 8м, не больше 100 об/мин).
1990-е: композиционные материалы опорных конструкций, демпферы упорных подшипников, улучшено гидроакустическое покрытие, водомет вместо винта.
Связь с подлодками: радиоканал с длиной волны 10–100км: скорость передачи 50 бит/сек на глубину 20м или выпустит буй с антенной длиной 500м. Радиоканал с длиной волны 10000–100000км (крайне низкие частоты КНЧ/ELF): скорость передачи 1 бит в минуту в подлодку на глубине 60м. Связь на сверхдлинных волнах и чрезвычайно низких частотах используемая для связи с подлодками, не работает ниже глубин 200-250м.
Самолета Ту-142МР трос-антенна СДВ-диапазона длиной 8600м: связь с подлодками на глубине 30м.
Космическая радиосвязь длина волны от 5см до 3м.
Под действием магнитного поля ферриты пропускают радиоволны только в одном направлении, поглощая встречную волну.
Рост от 1000Hz до 5000Hz – трансформатор легче вдвое. До 100000Hz – легче в 10 раз.
Термостабилизированные кварцевые резонаторы: расхождение 0,007сек за 1,5-2ч.
КПД электромотора = сопротивление мотора делить на сумму сопротивления мотора и внутреннего сопротивления источника тока. Чем больше сопротивление мотора, тем больше КПД
НЕЙТРИНО может пройдя сквозь Луну передать сигнал с Земли в лунную базу в обратной стороне Луны. Политехнический университет Вирджинии предлагает нейтринную одностороннюю связь с подлодками. Передатчик: накопительное мюонное кольцо обеспечивающее поток нейтрино 1014 частиц в секунду. Пройдя сквозь планету незначительная часть нейтрино реагирует с ядрами атомов воды, образуя высокоэнергетические мюоны, вызывающие в воде черенковское излучение для фотодетекторов подлодки: скорость передачи 10бит/сек.
Свет: Земля – Луна: 1,255сек. Луна: 1-я косм.скорость 1,7км/сек, 2-я 2,38км/сек. 4-я (вылет с Галактики) 537км/сек (Солнце вокруг центра Галактики 240км/сек).
Солнечная радиация: 1,374Вт/м2 у Земли, 50Вт/м2 у Юпитера, 1Вт/м2 у Плутона.
0,5м полиэтилена достаточно для защиты от всех видов радиации космонавтов летящих на Марс
ГИРОСКОПЫ ВОЛОКОННО-ОПТИЧЕСКИЕ: погрешность 50 раз меньше лазерных. Лазерный гироскоп: угловые скорости от тысяч оборотов в секунду до сотен миллиардов раз меньших – до одной миллионной градуса в час.
При отражении света теряется полволны.
Телескоп обнаружит лазер 100Вт с расстояния ближайшей звезды.
Емкость Земли чуть > 700мкФ. 1Кл = 1А·с.
Допускаемое в воздушных конденсаторах напряжение 700V/мм. У слюды пробивное напряжение 1000000V/мм.
Частотно-модулированный сигнал наиболее устойчив к помехам
ЧЕЛОВЕК взрослый: 75км нервных волокон, 213 костей. Спринтер 3-4л.с. Велогонщик (70-80кг) 2,5л.с. в течение 0,5ч. Человек-спринтер 44,74км/ч, страус 75км/ч, гепард 120км/ч.
Для человека допустимо углекислого газа в воздухе до 2-3%, кислорода до 13%. При 0,65атм допустимо 30-40% кислорода в воздухе.
У человеков 200-206 костей, 33-35 позвонков, 640-850 мышц. Для ходьбы хватает 200 мышц. Рождаются: 350 костей – часть сращивается в время роста – у взрослых 206 (86 парных, 34 непарных). Связок ~400.
Мозг: 2% массы тела, потребляет 20-30% общей энергии, электромощность 25W: 5г глюкозы, 3л кислорода в час. Мозг: > 4Тб. За жизнь человек запоминает в среднем 150 триллионов бит информации. Мозг с информации строит целостную картину 0,08сек: задержка «реальность – её восприятие». Мозг принимает решение не быстрее 0,03сек. Мозг работает на частоте от 14Hz до 40Hz. Тета-ритм мозга человека управляет скоростью регенерации. Нейрон: 1сек ~20 импульсов длиной неск.миллисекунд. Любой сигнал – от сетчатки, уха, кожи, языка, носа, мышц – запаздывает на ~0,1сек.
У женщин постоянный потенциал мозга ~0,7V, у мужчин скачет 0,1-1V.
Миоуправление (ток с мышц) экзоскелетом 0,1V, нейроуправление (ток с головы) 0,01V в лучшем случае.
Глаз: 17бит, 500 оттенков серого, 10млн цветовых оттенков. 1% людей видит инфракрасное и/или ультрафиолетовое. Сетчатка внутри глаза: ~650кв.мм, 137млн светочувствительных клеток: 130млн палочек черно-белого видения, 7млн колбочек цветового зрения: частота сканирования картинки 30Hz. Для слитного восприятия картинки на 1 градус угла зрения минимум 60 пикселей. У стрекоз 30 тысяч линз в каждом глазу.
Тактильные пиксели кисти ловят вибрацию частотой до 200-300Hz. В подушечке пальца 3000 тактильных пикселей, размер пикселя 0,7мм. На теле человека 1млн тактильных пикселей. Время тактильной реакции 0,09-0,022сек. Время реакции на свет 0,15-0,22сек. Время реакции на звук 0,12-0,18сек.
Точность слуха право-лево 3 градуса. Человеческий слух распознает задержку более 0,05сек. Миниально различимая пауза между звуками 0,001сек.
Средний человек на Западе за жизнь потребляет 50т еды, 50т воды.
Генокоды человека, шимпанзе совпали на 98,7%. ДНК пшеницы 5раз, амёбы 200 раз > ДНК человека
90) Кусочек моего резюме работодателям:
1. конструктор, стаж непрерывно с 1970г
2. изобретатель, стаж непрерывно с 1970г
3. моделист, стаж с 1970г
4. технический физик, стаж с 1978г
5. технический химик. Стаж с 1990г. Незапатентованные химические изобретения.
1996г. Химическое фрезерование рамы своего велосипеда водой для облегчения выполнил в 1979г, смазав дорожки подшипников солидолом. Государство отомстило мне за самостоятельное изобретение химического фрезерования: отслужив 2 года в Армии приехал домой обнаружил: велосипед целый, не ржавый, но его рама которую я химически фрезеровал, согнута по малому радиусу по двум передним горизонтальным трубам. Согнуть раму велосипеда по двум малым радиусам не повредив гоночный руль, обода колес и педали невозвожно – рама в десятки раз прочнее. Государство вначале агентурой разобрала полностью велосипед, поставили на бордюр с тряпкой на раме, раму переехал самосвал, согнув 2 трубы большого диаметра. Затем велосипед собрали.
6. ракетомоделист, стаж с 1971г с перерывами
7. технический математик, стаж с 1989г
8. робототехник, стаж с 1988г
9. алгоритмист, стаж с 1988г
10. токарь, 3 разряд, стаж 1 год в училище + 2 года на заводах
11. фрезеровщик, стаж 10 минут
12. резчик на пиле, стаж 3 года в 2 заводах
13. крановщик козлового крана. Стаж 1,5 года на складе метал-профилей на улице в Заполярье.
14. лифтер, стаж 11 лет
15. электросварщик-самоучка, стаж 5лет. 1987г купил 2 сварочных агрегата, выходы соединил параллельно. Поставил их в своей комнате. Насыпал на пол крупный песок в противопожарных целях. 5лет выполнял частные оплачиваемые заказы: сварка рам велосипедов, деталей мотоциклов, автомобилей, заборов, резка металлов… Делал сварку нержавейки нержавеющим электродом.
16. электрик-самоучка, трехфазный переменный ток 380V, стаж 3 года по частным оплачиваемым заказам в подвалах, подъездах домов.
17. работа бензиновой паяльной лампой, стаж 2 месяца
18. работа с стеклопластиком (стеклоткань + эпоксидная смола), стаж 2 недели.
19. маляр, стаж 2 года + 5лет опыта качественной окраски моделей. Окраска моделей с ошкуриванием, стаж 5лет.
20. штамповщик, стаж 3 года, 2 завода
21. стропальщик, 5 разряд, стаж 3 года в 2-х заводах
22. резчик железных листов на гильотине, стаж 2 года, 2 завода
23. заточник фрез, инструментов, стаж с 2003г, 4 разряд
24. шлифовщик, стаж с 2002г по 2014г
25. круглошлифовальщик, стаж 2002-2007г
26. художник, стаж 4 года. Выполнял оплачиваемые заказы
27. спасатель морской: могу переплыть пролив в 20км, если есть ориентир: высокая гора. Ныряю на 6м на 2мин. Бегаю по дну 6км/ч 2мин ориентируясь по песчаным волнам (параллельны водяным). Плавал на 2-метровых волнах. Уверен вдали от берега могу плавать на 30-метровых волнах. Горизонтальные волновые вихри неопасны: нет большой плотности энергии. В отличие от вертикальных водяных вихрей от тонущих с креном кораблей, от которых нужно держаться подальше. Горизонтальный вихрь недолго достает, если правильно нырнул. Моя техника на крупных волнах: нырок под волну – наклон точки нырка на волне на угол 45°. Погружение на угол 45° с твердо зафиксированным прямым телом = проход через вихрь (2сек) + по горизонтали в 10см от дна + 3-4 секунды обратная волна уносит в море – руками бег по дну, руки, ноги бегают вбок по дну для удержания направления навстречу волне = руль – не развернет, не закрутит. 2 нырка – обратное течение – за полчаса, при активном гребле к берегу снос в море – 100м при 2-метровой волне. Возвращение: бег по дну (ноги, колени работают в 2см от дна только в горизонтальной плоскости) в фазе: нет обратной волны, спина антикрылом. Дважды тихо под водой подплывал (Каспийское море) к тюленям на 2м.
Владею грамотной, актерской, ораторской речью, актерским мастерством. Владею силовой техникой разных единоборств: ударная, борцовская техника, неизвестные никому надежные, проверенные в реальных столкновениях с спортсменами-единоборцами, изобретенные мною приемы, контрприемы, связки. Могу работать высококвалифицированным тренером по самому нетрудоемкому в мире обучению высокорезультативной силовой технике разных единоборств. Как лучший в мире специалист по уменьшению труда знаю как достигать цели минимальным трудом, как просто, понятно сформулировать метод уменьшения труда. Имею 36-летний стаж моделиста. Перематывал обмотки на многополюсных (7-9 полюсов) электромоторах моделей с пропиткой перемотанных обмоток эпоксидной смолой: нет пузырей, больше теплопроводность. Могу паять, распаивать, сверлить. Опытный маляр с стажем. Слесарь по велосипедной, мотоциклетной, автомобильной технике. Могу работать на токарных, плоскошлифовальных, круглошлифовальных, пильных… станках. Могу ставить ОС Windows XP, Windows 7. При отказе ОС могу установить вторую ОС, драйвера, обеспечить ими доступ к данным ОС. Могу делить на разделы жесткие диски, вычищать (по имени файла) реестр
Я заточник фрез 5лет просил тонкий облегченный абразивный круг: не надо править мучаясь с охлаждением керамических пластин фрез в заточке. Абразивный круг охлаждается осыпанием абразивных частиц. Станки-автоматы для заточки фрез оснащали тонкими облегченными (вес, цена втрое меньше) абразивными кругами: не перегревались, не требовали правки.
Заточникам давали толстые абразивные круги, которые каждые 2-3мин стачивать приспособлением до толщины режущей кромки как у кругов станков-автоматов. Правка поднимала кучу абразивной пыли, которую глотали рабочие каждые 2-3 минуты. От толстых абразивных кругов от резкого нагрева трескались металлокерамические режущие пластинки: высокий процент брака.
Толстые круги кончились: 2 месяца давали тонкие круги станков-автоматов. Количество труда тонкими кругами сократилось в 8-10 раз (не надо править круги, не рассыпаются от резкого нагрева режущие пластинки), скорость работы выросла в 4 раза. Потом больше не давали абразивные круги станков-автоматов несмотря на многолетние просьбы заточников.
Менеджеры заказывали на рынке только толстые круги: от их веса сотрясался станок. Тонкие круги работали плавно безопасно без вибраций. Менеджеры давали станкам-автоматам лучшие круги, рабочим худшие. Для рабочих менеджеры не сделают инструмент приспособление так как нужно рабочему, для станка-автомата сделают даже за большие деньги. Для рабочих менеджеры не купят станок нужный рабочему, для станка-автомата купят всё. Менеджеры станки-автоматы уважают больше прав рабочего.
Инженер не имеет право выбирать для рабочего станки, приспособления, инструмент – это право рабочего выбрать станки, приспособления, инструмент: инженер не работает на станке, не знает проблем рабочего, какие приспособления инструменты удобнее рабочему.
Попытки рабочих, инженеров профессионально возвыситься (стать чемпионами в своей профессии) над людьми, секретными инструкциями карает агентурным гостеррором христианская инквизиция.
2000-2001г: в заводе «Авиаагрегат» Махачкала работая на электропиле по металлу (трубы квадратного сечения) вместо 120 труб как напарник (работал 15лет, смена-2) я пилил 600 (5 норм) с небольшим труб в день чтоб доказать: я чемпион профессии имею право зарабатывать больше любого другого рабочего. В ответ контрразведка снизила расценки работы так что напарник (у него семья) уволился, я через 4 месяца зарабатывал на 40% меньше станочников по словам Христа «кто хочет быть первым между вами, да будет вам рабом» – рабы работают бесплатно.
Когда менеджеры получают зарплату в разы больше рабочего, никто не кричит про перерасход фонда зарплаты. Когда рабочий делает 5-10 норм в месяц начинаются крики христиан: перерасход фонда зарплаты. Рабочим делающим 5-10 норм, срезав расценки платят в 4-8 раз меньше заработанного.
1 рабочий заменил 10 рабочих: предприятие платит государству в 10 раз < налогов за рабочих, оставляя себе эти деньги (это > 10 зарплат этого рабочего). Обычно рабочие в странах получают на руки 40% от произведенного. Если 1 рабочий заменит 10 рабочих, работодатель получает себе необлагаемых налогом дополнительно 107% от зарплаты (на руки) рабочего.
Рубильным станком прутков (диаметр 2см, длина 1,5м) сделал за смену 10 норм (5000 вместо 500).
Работая заточником фрез обнаружил: с алмазными абразивными кругами (при соответствующем размере зерна) работа 4 раза быстрей, чем с корундовыми. 1 заточник заменит 2 с учетом настройки станка. В 10-12 раз меньше вероятность скола (брак) керамики от температурных скачков: с алмазным кругом керамика, метал греются меньше. Алмазные круги 5 раз дороже, 10 раз долговечнее. Обычный круг хватает только на день. Работа только на алмазных кругах соответствующих по размеру зерна, уменьшит затраты работодателя на заточку инструмента в 8 раз с учетом цены человеко-часа.
Дважды ездил в ВАЗ с кучей чертежей моих разработок, всегда начальники отделов, главный конструктор ВАЗа отказывались рассматривать мои чертежи. Заявляли: стар, конструированием давно не занимаюсь, техника ушла вперед. Обращайтесь к молодым. Молодые соображали: принять на работу универсального инженера им невыгодно. Объяснил: конструирую весь агрегат автомобиля целиком, сам выполню всё. Все 10 менеджеров, их замы отказали в рабочем месте инженера. Один из замов заявил: примешь на работу – ему позволят создать отдел, наш закроют. Два начальника отдела при мне получили по телефону приказ: задержать пустым разговором до конца дня чтоб истратить время пропуска, не дать мне пройти все 10 конструкторских бюро, не дать стать инженером. Эти 2 начальника выполнили приказ государства
Вредительские принципы промышленности от менеджеров-офицеров спецслужб:
1. человек обязан государству и обществу, наоборот карается.
2. талантливый человек талантлив во всем (перевод человека на другую работу, чтобы предприятие не было обязано человеку)
3. профавторитеты запрещены. Исключение: агенты спецслужб
4. незаменимых нет
5. разделяй и властвуй
6. нельзя любить (положительные эмоции от общественно полезной деятельности запрещены) профессию без госвласти (заповедь-2 Библии). Профессии без госвласти инквизиторы считают угрозой Евангелию, принудительно коллективизируют для подчинения госвласти. Особенно велик агентурный гостеррор против изобретателей (профессия запрещена секретными инструкциями), инженеров
7. человек изначально виновен перед начальниками по христианскому принципу изначальной виновности человека
8. профессиональная честь карается
9. слишком хорошо нехорошо
10. не имей 100руб, а имей 100 друзей
11. жадность фраера сгубила (принудительная конфискация авторства начальниками предприятия в изобретениях и рацпредложениях изобретателей, рационализаторов)
1977г в школе в середине учебного дня остановили все уроки, как заключенных быстро гнали нас сотни школьников в кинотеатр на фильм «Калина красная», объясняющий: теперь по секретной инструкции государства смертный приговор ворам в законе за переход к состоянию законопослушного гражданина. Так российские силовики вбивали в головы детей: класс силовиков не даст уменьшить число своих кормильцев – преступников. Сегодня фильмы внушают обществу терпимость к спаиванию, ссучиванию женщин в массовых масштабах. Как это делают агентурным гостеррором знаю по рассказам моей матери
91) ПРЕЦЕДЕНТНОЕ ПРАВО снимает с Судей ответственность переносом ответственности на недоступных для личной ОТВЕТСТВЕННОСТИ (удалило государство) Судей. Это нарушает права человека, провоцирует силовиков ужесточать, усложнять законы для роста тюремной (рабовладельческой) экономики.
США – это рабовладельческая страна. Миллионы граждан США – это рабы работающие в тюремной экономике. Граждан США загоняет в рабство Уголовный кодекс США и секретные инструкции МВД.
Прецедентное право сужая специализацию адвокатов делает судебную защиту прав человека или предприятия в 5-40 раз дороже, приводит к несоразмерным вине приговорам – это преступление государства против граждан, предприятий.
Корпорации оплатив прецедент терроризируют гражданское общество. Расходы на адвокатов рекордны, их США перекладывают на обвиняемых, нарушая право человека на юридическую помощь – самый высокий в мире процент граждан в тюрьмах.
Чем меньше процент юристов среди граждан, чем меньше процент граждан в тюрьмах, тем совершеннее юридическая система государства. Для науки совершенная юридическая система – Нехристианское Римское право основанное на обобщении и универсализации принципов Суда, на анализе обстоятельств.
Христиане презумпцию невиновности заменили принципом изначальной с рождения виновности человека за то что его предки Адам и Ева съели яблоко в огороде идола-инопланетянина Бога. США, Россия по принципу изначальной виновности человека предлагают: берёшь вину по меньшей статье, снимем обвинение по большей. Людей усиливающих роль научной логики в управлении государством, Евангелие веками убивало дворцовыми переворотами, революциями, войнами
Навязанный государством Судье ИИ как советчик – преступный механизм замены Судей госидеологией, идеологический бандитизм государства против гражданского общества.
ГОСЦЕНЗУРА ИНТЕРНЕТА
Евросоюз не имеет права штрафовать иностранные интернет-компании за скачивание их сайтами нейтральной информации о пользователе сайта. Понятие «нейтральная информация о пользователе сайта» должно иметь международной юридическое определение для защиты интернета от госцензуры.
ОККУПАЦИОННАЯ ЮРИСДИКЦИЯ
Правительства США, России не защищают юридически свои компании ограничением юрисдикции Евросоюза его территорией. Юридическая наука не позволяет Евросоюзу штрафовать иностранные компании на проценты с их годового дохода на всей планете.
Юрисдикция Евросоюза не распространяется на иностранные территории, на деньги иностранных компаний полученных в иностранных для Евросоюза территориях. Евросоюз может брать с иностранных компаний штрафы только с доходов полученных в территории Евросоюза. Юрисдикция государств, их союзов включает только их территорию.
Евросоюз подталкивает государства создавать союзы государств для юридического обоснования сверхкрупных штрафов против транснациональных компаний так же, как США больше полувека подталкивает государства к созданию своего ядерного оружия для обороны от США. Евросоюз, США разрушают политическую и экономическую безопасность человечества – ввести санкции против Евросоюза, США.
ОККУПАЦИОННАЯ ЮРИСДИКЦИЯ
Все страны должны подписать «Международный договор запрета оккупационной юрисдикции»:
1. государства, их союзы не имеют права штрафовать предприятия на проценты от годовой выручки предприятия на всём мировом рынке. Юрисдикция государств, их союзов распроостраняется только на их территорию. Штрафы действуют только на те доходы, которые предприятие получило на территории юрисдикции данного государства. Распространение своей юрисдикции на чужие территории – это оккупационная юрисдикция, которая должна караться международными санкциями.
2. юрисдикция государств не распространяется на преступления чужих граждан на территории чужих государств. Территории юрисдикции разных государств разграничены, не должны перекрываться.
3. гражданин-А (или юридическое лицо-А) государства-А совершил коррупционное преступление в государстве-В. Жертва коррупции – физическое или юридическое лицо государства-С. Данное коррупционное преступление в юрисдикции государства-В, не в юрисдикции государства-С. Юридическое преследование государством-С за это гражданина-А (или юрлицо-А) – вмешательство в внутренние дела государства-В. Страны должны ввести санкции против государства-С за оккупационную юрисдикцию
4. преступление гражданина-А государства-А в государстве-В против не гражданина государства-А: у гражданина-А право выбрать Суд государства-В с отказом от Суда государства-А. Двойной суд нарушает права человека
5. преступление гражданина государства-А против гражданина государства-В в территории государства-В: действует только юрисдикция страны-В
6. гражданин государства-А совершил преступление против гражданина государства-В в государстве-С: у жертвы право выбора юрисдикции любой из стран-А-В-С. Жертва отказалась (или не может это сделать): действует юрисдикция страны-В
7. выносить наказание за преступление иностранцу государства-А в государстве-В может только государство-В. Суд государства-С не может выносить наказание иностранцу государства-А, если преступление произошло не на территории государства-С
Юрисдикция государства распространяется только на:
1. его территорию
2. его собственность
3. его граждан. список исключений
4. на совершивших преступление непосредственно против его граждан на его территории. Если на территории другого государства – это юрисдикция другого государства. список исключений
США БЛОКИРУЕТ БАНКОВСКИЕ СЧЕТА СТРАН: через ООН, Международный Суд судебный иск стран к США – возмещение морального ущерба в размере 10% от блокированного счета + набежавшие проценты по золотому курсу.
Для защиты от США в взаиморасчетах перейти к металлическим счетам в виртуальных граммах золота, платины, палладия, нефти... через уполномоченные банки стран НЕПОСРЕДСТВЕННО (удалило государство) участвующих в торговой операции.
Сила США в обороте внутреннего рынка. Уменьшить оборот продажей им сверхдолговечных равнопрочных товаров. Нехристианским странам надо максимально увеличить численность населения для создания внутреннего рынка с оборотом больше, чем в США.
Соучастник христианского бандитизма ООН заблокировала банковские счета Сирии, Ливии, запретило Правительству Ливии использовать авиацию для защиты госвласти от оккупировавших Ливию банд мусульманских наемников разведслужб США, нарушило монополию государства на применения силы.
Надо вместо ООН Организацию Объединенных Государств ООГ с частичной работой по видеоконференциям. ООГ: приоритет прав государств над правами наций, принцип незыблемости суверенитета стран. ООГ Уставом запретить функции Мирового правительства: только рассмотрение конфликтов между странами, только в рамках стран – непосредственных участников конфликта
После Мировой войны-2 до 2001г США спровоцировали 201 вооруженный конфликт из 248, убили 73 государства, 26 млн чел. США не пускает представителей терроризируемых США стран в заседания ООН, спецслужбами давит на членов ООН. Заменить физическое присутствие представителей стран на телеприсутствие (телеконференции) по криптозащищенным линиям интернета
МНОГОПОЛЯРНЫЙ МИР
Христианские страны утопили мир в крови международного бандитизма и военных преступлений строя Мировое христианское правительство с целью сделать Евангелие едиными правилами жизни всего человечества. В правилах класс силовиков – Бог, гражданское общество – рабы божьи которым запрещены эмоции, личные интересы и цели, частная собственность (взамен подписка на услуги), предпринимательство, эксплуатация людей.
Чем больше стран с современными военными технологиями и большим населением, тем больше вероятность остановить строительство христианами Мирового христианского правительства. Двигатель научно-технического прогресса: военно-политическое противостояние государств, военных союзов. Мировое правительство секретными службами, законами остановит научно-техническое развитие человечества, убьет «лишние» 7 млрд чел планеты.
Мировое правительство для сохранения власти запретит развитие технологий, полеты звездолетов к соседним звездам, упоминания об этом в интернете, сделает Землю тюрьмой народов в которой класс силовиков монополизировал мировой рынок транснациональными корпорациями которыми управляют офицеры спецслужб. В США «менеджерский капитализм» законами вытесняет предпринимательский капитализм, защищая корпорации от изобретательности предпринимателей
Запретить Конституцией, уголовно карать участников международных экономических, медицинских договоров с текстом скрытым от граждан. Это предательство гражданского общества в пользу классовых интересов силовиков (менеджеры крупных корпораций типа Интел, Боинг – офицеры спецслужб). При появлении Ковид-19 у христианских стран было 330 зарубежных военно-бактериологических лабораторий. У нехристианских стран не было. Нужны экономические санкции против стран с зарубежными военно-бактериологическими лабораториями.
США для госмонополии на ИИ пропагандировало ненависть к ИИ, организовало в 2000-х уличную демонстрацию народных масс против ИИ в Техасе, чтоб общественной ненавистью загнать специалистов ИИ рабами в секретные организации, как СССР загонял специалистов безвестными пожизненными рабами в секретные города (мечта силовиков христианских стран). Специалистов ИИ спас Китай вложив в ИИ большие деньги с бюджета. Узнав это США прекратили пропаганду ненависти к ИИ.
По христианскому принципу изначальной виновности человека силовики США имеют право застрелить бегущего от полицейского человека не совершавшего преступлений. Принцип изначальной виновности человека христиане применяют против граждан и стран, бомбят суверенные страны, устраивают антипредпринимательские революции.
Глубинное государство – контрразведки, разведки христианских стран – революциями, международным бандитизмом (христианский фундаментализм), военными преступлениями принуждают мир служить евгенике Евангелия. Они террором, угрозами подчинили миллиардеров (дай деньги фраер на благотворительность а то тебе сука плохо будет), всемирные организации, организации предпринимателей, масонов.
Они изобретают доказательства – рынок ничего не регулирует, рынок и жизнь человека должны регулировать силовики. Доводят всё до крайности чтоб платили больше прямых, скрытых налогов на госрегулирование.
СССР играл в госрегулирование экономики, жизни человека – экономический крах, распад страны. США играл в идею верховенства прав человека – либеральный капитализм и глобальный рынок, став самым авторитетным государством, идеалом свободного мира.
После распада СССР силовики США, Евросоюза по словами своего идола Христа о принудительном разделении семей, законами защищают меньшинства, трансгендеров для применения христианского принципа изначальной виновности человека против (удалило государство) семьи; выжимают максимум налогов на госрегулирование жизни человека и экономики, настраивают мир против либерального капитализма, глобального рынка.
В США, Евросоюзе партии силовиков добиваются войн, революций в зарубежных странах для строительства Мирового христианского правительства, как это идеологией Мировой революции делали военные СССР в 22 странах.
Гражданам нужна партия предпринимателей – Капиталистическая партия – за интересы (платежеспособность граждан, объем продаж) рынка, за свободное движение по всему миру товаров, услуг, денег, информации. Капиталистическая партия ориентирована на потребление товаров и услуг, а не рост расходов на зарубежные военные базы, международный бандитизм.
Партии силовиков критикуя общество потребления готовят общество к бедности от роста налогов на содержание зарубежных военных баз, где миллионы парней не приносят налоги, а тратят госбюджет. Чтоб загнать миллионы парней в зарубежные военные базы класс силовиков искусственно снижает уровень жизни в стране и мобильность граждан, поднимает цены на жилье.
В США выборы: партия «Злые силовики» (демократы) и партия «Добрые силовики» (республиканцы) – это партии международного бандитизма, военных преступлений для строительства Мирового христианского правительства и ограничений в интернете.
Конец Холодной войны – разведслужбы, Минобороны США чтоб в 20 раз не сокращать финансирование, организовали теракт 11.09.2001 Нью-иорк наземными операторами военных беспилотников, управлявших тремя пассажирскими Боингами (1 утопили в океане, 2 налетели на небоскребы), десятки лет международного бандитизма, военных преступлений христианских фундаменталистов-силовиков чтоб лишними законами госбезопасности создать паразитические рабочие места силовиков родственникам, секс-партнерам силовиков. Это не прекратится никогда – силовики размножаются быстрее гражданского общества. Действия силовиков США – предательство силовиками интересов гражданского общества США, невыполнение силовиками Гражданского договора о государстве, с чем боролся Джулиан Ассанж
Действия класса силовиков США направлены на:
1. рост числа функций государства для максимума рабочих мест силовиков
2. создать угрозы в всем мире чтоб не дать гражданскому обществу США сократить финансирование класса силовиков
США нарушают принцип соразмерности, пропорциональности уголовного наказания физических, юридических лиц; увеличивают преступность чтоб выбить с граждан больше налогов и штрафов для «защиты общества».
Причина что в США половина (нетерпимость государства к гражданам) всех заключенных планеты, причина чрезмерности наказаний граждан США и агрессии против суверенных стран – это право граждан США на огнестрельное оружие создающее у силовиков США нулевую терпимость к людям и странам. Силовики США блокируют запрет огнестрельного оружия: продажа оружия нужна для убийства агентами людей противодействующих идеологии Евангелия.
Силовики США убивая граждан в их жилищах, объясняют: гражданам оружие надо для самозащиты. От бандитизма государства защиты нет. Огнестрельное оружие населения в 10 раз увеличивает расходы налогоплательщиков США на тюрьмы.
Войска Международной антихристианской военной коалиции принудят власти США принять законы тюремного заключении за приобретение, хранение огнестрельного оружия. Право убивать человека огнестрельным оружием – монополия государства. Иначе контрразведка США не удержится от массовых агентурных убийств граждан по евгенике Евангелия.
При нападении другой страны каждая страна имеет право НА СВОЕЙ ТЕРРИТОРИИ применять против военного врага ядерное и химическое оружие по принципу минимальной достаточности. Иначе международный бандит США создаст Мировое христианское правительство с целью сделать рабовладельческие принципы Евангелия едиными правилами жизни всего человечества.
Не признает международный бандит США равноправие суверенных стран, сокращает человечество – выложить по радио, в посылках с флешками и в интернете чертежи; технологию производства ядерного, химического, биологического оружия, адреса лабораторий и предприятий с схемами их взлома. США от проблем прекратит международный бандитизм, оккупацию человечества военными базами (750 баз, 80 стран)
Если власть на всей планете через ООН захватит Мировое христианское правительство, надо:
1. публично выложить в всем мире точные адреса и все банковские счета всех христианских организаций и их зарубежных филиалов, ведущих пропаганду учебника коммунистов Евангелия
2. публично выложить в всем мире точные адреса, все банковские счета и всю личную информацию всех христианских миссионеров ведущих пропаганду учебника коммунистов Евангелия
3. выложить по радио, в посылках с флешками, в интернете десятками тысяч сайтов технологию производства компактных ядерных боеголовок, баллистических и крылатых ракет для них
4. выложить по радио, в посылках с флешками, в интернете десятками тысяч сайтов технологию автономных военных роботов работающих на земле, в небесах, под водой вместе с их софтом ИИ
5. выложить по радио, в посылках с флешками, в интернете десятками тысяч сайтов адреса всех христианских военно-бактериологических лабораторий с описанием их систем безопасности, способами их обхода. Указать длину всех труб (водопровод, канализация, вентиляция...), кабелей с источниками энергии, информации, материальных компонентов. Выложить технологию взлома лабораторий минироботами (их чертежи, алгоритмы) с ИИ через водопровод, канализацию, вентиляцию
6. выложить по радио, в посылках с флешками, в интернете десятками тысяч сайтов всю информацию о технологии производства химического оружия с способами получения всех химикатов. Указать адреса магазинов химикатов и предприятий их выпускающих на всей планете
7. выложить по радио, в посылках с флешками, в интернете десятками тысяч сайтов всю технологию производства гидроботов для уничтожения христианских подводных тоннелей, трубопроводов, кабелей всех типов. Включая технологии ликвидации всей христианской космической инфраструктуры, технологии создания в христианских странах распределенной (для защиты от пеленгаторов) сети источников радиопомех
92) Еврейская нация внесла непропорциональный её численности огромный вклад в науку, инженерию, культуру человечества. Признанием этого вклада должна быть помощь человечества Израилю в решении внутренних проблем Израиля, которые искусственно создают два крупных европейских государства, используя тайные связи с нанятыми их спецслужбами за деньги исламскими террористами (как в Ливии) и с руководством нескольких исламских государств.
Израиль на глобусе занимает территорию булавочного укола. Но силовики двух европейских государств твердо намерены играть христианского Бога – тысячелетиями держать Израиль за горло, тайно создавая и финансируя спецслужбами взаимную ненависть между арабской и еврейской нацией, чтоб сильный интеллект еврейской нации не пользовался природными ресурсами арабской нации – это ресурсы для европейских наций. Арабы всегда будут глупыми тайными марионетками европейцев, вместо использования интеллекта евреев в своих военных, финансовых интересах.
Главная надежда человечества в решении арабо-еврейского противостояния – это направленные на уничтожение института семьи слова идола европейских силовиков коммуниста Иисуса Христа. Это постепенная национализация законами, секретными инструкциями, агентурой спецслужб всех детей (ювенальная юстиция, несовершеннолетние трансгендеры, пропаганда однополой любви...) государствами, где правят европейцы. Как следствие исчезнут европейские нации и арабо-еврейское противостояние.
Человечество не должно мешать этим фанатикам культа самоубийства человечества
(в 2-м пришествии Христос физически убьёт всё человечество, сделает с убитых копии в виртуальных планетах Рай и Ад)
Евангелия начинать с самоубийства своих наций, вместо их активной работы по сокращению человечества. Это уничтожит учебник идеологических террористов Евангелие как главную угрозу существования человечества в эпоху ядерного и бактериологического оружия: у христианских стран 330 зарубежных военно-бактериологических лабораторий вокруг Китая, России
93) 1978г: я одноклассникам и знакомым в 1978г говорил фразу «мне достаточно 10 лет чтоб доказать – я чемпион мира по конструированию». В ответ империя моральных людоедов в школе номер 4 города Махачкала посадила сзади меня агента-одноклассника Макаева Руслана с которым до этого никогда не было никаких отношений, конфликтов.
На следующий день после произносимой мной фразы «мне достаточно 10 лет чтоб доказать – я чемпион мира по конструированию» агент Макаев во время уроков с всей силы сзади бил кулаком в затылок (1-2 внезапных удара каждый час). Закончилось тем, что на следующий день после очередного удара я с разворота воткнул ему ручку в лицо, проткнув кожу насквозь.
Через неделю на его место империя моральных людоедов посадила агента-одноклассника Поландова Игоря, одного из самых крупных одноклассников. С Поландовым до этого никогда не было никаких отношений, конфликтов. Каждый раз когда я одноклассникам и знакомым в 1978г говорил «мне достаточно 10 лет чтоб доказать – я чемпион мира по конструированию», на следующий день в время урока агент Поландов с всей силы наносил сзади удар в затылок (1-2 внезапных удара каждый час).
Государство социального равенства не позволит гражданам как рабам заявлять о своем профессиональном превосходстве над всем миром. За это христиане по обвинению в гордыне агентурным гостеррором пожизненно морально ломают человека, принуждая признать себя рабом: рабы инструмент рабовладельца – у инструмента нет права считать себя лучше других – все рабы равны (социальное равенство рабов божьих). Рабам запрещены права, личные интересы, цели, эмоции.
Подобными эпизодами почти ежедневно заполнена с 1970г вся моя изобретательская жизнь прирожденного маньяка изобретательства, которому заповедью-2 Библии христианское государство с 1970г непрерывно агентурным гостеррором (госрегулирование жизни граждан) реализует запрет на профессию конструктора-изобретателя по мотивам коммунистической госидеологии Евангелие.
Я как изобретатель, конструктор и домашний технический моделист свидетельствую: нам нехристианским нациям не запрещают работать инженерами-технологами, но секретными инструкциями инквизиции по идеологическим мотивам работать инженерами-конструкторами, заниматься изобретательством, домашним техническим моделизмом (уничтожение агентурой инквизиции моделей, средств производства, запасов материалов для моделизма, применение пожизненного агентурного биохимического террора...).
Заповедь-2 Библии: нельзя никого и ничего любить – любовь запрещена – нельзя любить профессию конструктора-изобретателя. По Заповеди-2 Библии христианские государства мстят (агентурный гостеррор) за любовь человеку на 3 поколения, включая его детей, внуков.
Я универсальный изобретатель Томас Эдисон в ответ на принудительное социальное равенство Евангелия вынес Приговор: законными способами очистить планету от государств с госидеологией Евангелие для защиты класса инженеров и изобретателей от их классового врага – госидеологии Евангелие. Мой чемпионмирский интеллект исполняет смертный Приговор госидеологии Евангелие в глобальном масштабе именем класса инженеров и изобретателей. Мы инженеры, изобретатели служим долговременным интересам Гражданского общества по Гражданскому договору.
За пропаганду Коммунизма, учебника коммунистов Евангелия, учебника идеологических террористов Евангелия, учебника рабовладельцев Евангелия, книг Карла Маркса в всех странах законом будет введено тюремное заключение от 5 до 10 лет.
За исполнением закона в всех странах будут следить коммисары, имеющие право отправлять в тюрьмы от 5 до 10 лет Судей не выполняющих этот закон.
После уничтожения Иисуса Христа на всей планете больше никогда Христос, его идеология не смогут запрещать нам нехристианским нациям профессию инженера, изобретательство, домашний технический моделизм, военно-промышленное предпринимательство! Профессию инженера может запретить человеку только Великий Судья – Мировой рынок.
У государства нет права запрещать людям профессию инженера, решать сколько человеку разрешено иметь денег.
Евангелие это бессмысленные нарушения прав человека по идеологическим мотивам учебника иделогических террористов Евангелия. Эти мотивы – преступления для юридической науки.
Я свидетель: государство по мотивам Евангелия всю жизнь блокируют профессиональную деятельность инженеров, изобретателей, чтоб государство и гражданское общество не были обязаны инженерам, изобретателям. Гражданское общество (рабы божьи) может быть обязано только государству, которое строит из себя Бога-рабовладельца по Евангелию.
Самые ожесточенные войны Истории – религиозно-идеологические войны между христианскими странами по мотивам учебника идеологических террористов Евангелие. Христиане подняли идеологическую нетерпимость государства на уровень геноцида, многократно сократив население Европы. История христианских стран это 2000 лет непрерывных войн от вечного идиотизма их чиновников из-за госидеологии.
Чем меньше государство с антисоздательской госидеологией Евангелие, тем меньше вероятность что оно по идеологическим мотивам запретит работать Создателем людям нехристианских наций. Поэтому я для защиты интересов нехристианских наций буду добиваться законными методами расчленения (начиная с самых крупных государств) всех государств с антисоздательской госидеологией Евангелие и населением больше 20 млн чел для защиты права человека на выбор профессии Создателя (инженер, изобретатель, программист, специалист ИИ), для защиты человека от антисоздательской заповеди-2 Библии, от социального равенства.
В этом мире всё ничто в сравнении с профессией Создателя (инженер, изобретатель, программист, специалист ИИ). Я найду способ эмигрировать чтоб служить Создателем нехристианской, немусульманской, некоммунистической, несоциалистической стране.
Необходим раздел госвласти и экономической власти для защиты гражданского общества от перехода к рабовладельческому государству. Госвласть у силовиков, экономическая власть у частных предпринимателей.
Частные предприниматели, миллиардеры это народ – частное лицо без госвласти. Закон должен карать тюремным заключением натравливание народа против частных предпринимателей, миллиардеров как попытку разрушить экономическую безопасность государства.
Меня десятки лет учили: главное – классовая борьба. Согласен: вся Вселенная взорвется железной Яростью классовой борьбы класса инженеров и изобретателей против коммуниста Христа и его коммунистической идеологии. Вся Вселенная будет полностью очищена от коммуниста Христа и его коммунистической идеологии.
Классовая борьба поможет классу инженеров и изобретателей создать сверхоружие, абсолютное оружие против классовых врагов класса инженеров и изобретателей. Смерть Коммунизму, слава либерально-демократическому Капитализму. Изобретатели будут изобретать звездолеты, галактические крейсеры, антипланетное оружие для полного уничтожения всего коммунистического в всей Вселенной.
Россия всю мою жизнь добивается чтоб я полностью отказался от научных взглядов на мир, принял христианскую госидеологию, по которой граждане рабы божьи, государство по Конституции инопланетянин-рабовладелец Бог, имеющий право заниматься Госрегулированием жизни граждан: запрещено право выбора профессии и места работы, право становиться миллиардером на основании профессионального превосходства над всеми людьми, право выбирать друзей (их принудительно, карая агентурой противодействие, назначает майор), право выбора что читать...
Я не раб, у меня есть права человека для эмиграции из страны коллективистов (запрет индивидуальной профессиональной конкуренции) и христианских фундаменталистов! Для нас индивидуалистов смысл жизни доказать своё профессиональное превосходство над всеми людьми, за что карают силовики России по госидеологии.
Силовики добиваются чтоб я прекратил десятилетиями заниматься изобретательством в своей комнате, вышел на улицу общаться с людьми – стал коллективистом.
Коллективизм нужен силовикам чтоб покрывать преступления коллег против гражданского общества, сделать подобное поведение общественной нормой. Госидеология должна быть запрещена не только в Конституции. Граждане имеют право защиты от госидеологии.
Помешательство на «сверхценных идеях» (учебник коммунистов Евангелие, коллективизм) не уменьшилось у силовиков. «Сверхценные идеи» для них дороже самой жизни на планете. Культ самоубийства человечества Евангелие – главная опасность для существования человечества.
27.01.2026г обновление статей – последние правые нижние: 2-7)..13-14).. 18)..26).. 30)..50-52).. 62)..65)..67).. 72-78).. 87-88)..91).. → 18)..61).. 2).. → 3)АЛГОРИТМ ПОЛНОГО БОЯ АНДРОИДА В ЕДИНОБОРСТВАХ.. 4)..68).. 43)МЫШЬ ДЛЯ ТЕСНОГО СТОЛА.. 27)..72-73).. 1)..37)..
26.01.2026г обновление Энциклопедии для ИИ – последние верхние:
ДЕНЬГИ ←
КОСТЮМ ТЕЛЕПРИСУТСТВИЯ ←
КОСТЮМ ДЛЯ ВХОДА В МЕТАВСЕЛЕННУЮ ←
КОСТЮМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ ←
ЛИБЕРАЛИЗМ ←
ЛИБЕРАЛ ←
ГОСИДЕОЛОГИЯ ←
БЮРОКРАТИЗАЦИЯ ←
БЮРОКРАТИЯ ←
РАЗНИЦА МЕЖДУ ЧАСТНЫМИ И ГОСУДАРСТВЕННЫМИ ОРГАНИЗАЦИЯМИ ←
РАЗНИЦА МЕЖДУ НАУЧНЫМ И РЕЛИГИОЗНЫМ МЫШЛЕНИЕМ ←
ЭКСТРЕМИЗМ ←
ОБЩЕСТВО ←
ВЕРУЮЩИЕ
ОБЩЕСТВЕННОЕ ДОСТОЯНИЕ
НАУКА
КОММУНИЗМ
СОЦИАЛИЗМ
СОВЕСТЬ
РЕЛИГИЯ
ГОСУДАРСТВЕННАЯ СОБСТВЕННОСТЬ
СИЛОВАЯ (СИЛОМОМЕНТНАЯ) ОБРАТНАЯ СВЯЗЬ
ТАКТИЛЬНАЯ ОБРАТНАЯ СВЯЗЬ
ГОСРЕГУЛИРОВАНИЕ ЖИЗНИ ЧЕЛОВЕКА
ИДЕОЛОГИЯ
ИДЕОЛОГИЧЕСКИЙ БАНДИТИЗМ ГОСУДАРСТВА
ИДЕОЛОГИЧЕСКОЕ ГОСУДАРСТВО
КОНТРРАЗВЕДКА
КОНТРРАЗВЕДКА ХРИСТИАНСКИХ СТРАН
СОЦИАЛЬНЫЙ РЕЙТИНГ
КАПИТАЛИСТ
КАПИТАЛИЗМ
СПОРТИВНАЯ ФЕДЕРАЦИЯ
КЛАСС ОБЩЕСТВА
ЕДИНОЛИЧНИК
КОНСУЛЬТАНТ
АНТИМОНОПОЛЬНАЯ СЛУЖБА
ГОСФЕОДАЛ
СИЛОВИК
ИДЕАЛЬНОЕ ГОСУДАРСТВО
СВЕТСКОЕ ГОСУДАРСТВО
ГОСУДАРСТВО
СТРАНА
ГОСОРГАНИЗАЦИЯ
ГОСПРЕДПРИЯТИЕ
НАРОДНОЕ ПРЕДПРИЯТИЕ
РАЗНИЦА МЕЖДУ «ОБЩЕСТВЕННЫЙ» И «СОЦИАЛЬНЫЙ»
ПОЛИТИЗАЦИЯ
ДЕМОКРАТИЯ
КОНСТИТУЦИЯ
КОММУНИСТ
МАРКСИЗМ
ЭКСПЛУАТАЦИЯ ЧЕЛОВЕКА ЧЕЛОВЕКОМ
СОЦИАЛЬНОЕ РАВЕНСТВО
ТРУД
ОРГАНИЗОВАННЫЙ КЛАСС ОБЩЕСТВА
ОБЩЕСТВЕННОЕ ДВИЖЕНИЕ
КОЭФФИЦИЕНТ ОБОБЩЕНИЯ АЛГОРИТМА
АЛГОРИТМ ПАУЗЫ
КОЭФФИЦИЕНТ СОВМЕСТИМОСТИ
ЧУТЬ
АЛГОРИТМЫ ХОДЬБЫ АНДРОИДА
СМЫСЛОВАЯ ЕДИНИЦА ПРЕДЛОЖЕНИЯ
ПРОЦЕНТНЫЙ ПРИОРИТЕТ
МОДЕЛИ ПРОЦЕНТНОГО ПРИОРИТЕТА
ДЕРЖАТЬ ДИСТАНЦИЮ
ОБЪЕКТ
СУБЪЕКТ
ХРИСТИАНЕ
ЕВАНГЕЛИЕ
ЛИЦО ХРИСТИАНСКОГО МЕНТАЛИТЕТА
АНТИХРИСТИАНСКИЙ КОДЕКС
АНТИХРИСТИАНСКИЕ ОРГАНИЗАЦИИ
АНТИХРИСТИАНСКИЕ ПАРТИИ
ЕВГЕНИКА ЕВАНГЕЛИЯ
СПАСЕНИЕ ДУШИ У ХРИСТИАН
ДУША
БОГ
ЖРЕЦ
ИДОЛ
ТОТЕМ
СОБОРНОСТЬ
ИСПОВЕДЬ
КУЛЬТ ПОТРЕБЛЕНИЯ
ИЗОБРЕТАТЕЛЬ
ИННОВАТОР
НАРОДНЫЙ КОНСТРУКТОР
СТАНОК
МАШИНА
АДАПТИВНЫЙ РОБОТ
ЭКЗОСКЕЛЕТ
ОБРАТНАЯ СВЯЗЬ (РОБОТОТЕХНИКА)
ОТРИЦАТЕЛЬНАЯ ОБРАТНАЯ СВЯЗЬ
ДАТЧИК
ПРОПОРЦИОНАЛЬНЫЙ ДАТЧИК СИЛЫ (МОМЕНТА, ДАВЛЕНИЯ)
РАЗНИЦА МЕЖДУ УГЛОМ АТАКИ И ТАНГАЖОМ
ГРАВИТАЦИОННАЯ НАВИГАЦИОННАЯ СИСТЕМА
ТЕХНОЛОГИЧЕСКАЯ ФУНКЦИЯ
ИНФОРМАЦИОННАЯ ПЕДЕРАСТИЯ
СПОРТ
ОСНОВА ПОЯВЛЕНИЯ ЖИЗНИ
НАУЧНАЯ ЛОГИКА
Костюм телеприсутствия и виртуальной реальности
Транзисторная муфта сцепления
Экзоскелет
Андроид
Искусственный интеллект андроида
Газотурбинный двигатель андроида Айзек
Гидробот. Робот-змея
Пушки межконтинентальные. Пушки подводные
Нейроинтерфейс
Протез
Алгоритм бега, ходьбы, защиты от толчка андроида
ИИ-поисковик
Тактильная кожа андроида
Телекамеры андроида
Защита радиоуправления
Компьютер андроида
Домашние роботы
Микробот
Беспилотник
Ракеты-носители
Сверхсветовой звездолет
Гравитационный навигатор для ракет
Красное смещение звезд
Нейтронная пушка
Луна
Автомобиль
Гонки Формула 1
Робоформула
Станки
Стереоколонка. Микрофон
Теория экономики. Антихристианская партия
Философия галактических колонистов
Теория эволюции
Инженерное образование
Энциклопедия для ИИ
Госкибернетика
Законы робототехники
Мои модели
Робосайты
ИНДИЯ: я изобретатель Томас Эдисон (по паспорту) с надеждой обращаюсь к властям Индии с просьбой разрешить реализовать разрабатываемый мной с 2002г проект костюма телеприсутствия и другие мои изобретательские проекты (по выбору индийской стороны) на территории Индии с использованием возможностей быстро усиливающейся промышленности Индии. Обязуюсь выполнять все интересы Индии. Буду очень признателен властям Индии за предоставление мне возможности реализовать мои инженерные проекты (больше сотни проектов) которыми занимаюсь полвека, но несмотря на мои полувековые усилия не имел возможности реализовать их из-за непрерывного с 1970г (с 8-летнего возраста) запрета на профессию конструктора-изобретателя властями по мотивам коммунистической госидеологии Евангелие. Я не последний человек в мировой робототехнике и искусственном интеллекте – приложу все усилия чтобы не разочаровать власти Индии!
универсальный изобретатель Томас Эдисон
ЗАКОНЫ РОБОТОТЕХНИКИ
Айзек Азимов: законы робототехники
Закон 0. не причини вред человечеству действием, бездействием
Закон 1. не причини вред человеку действием, бездействием
Закон 2. подчиняйся человеку не нарушая закон-1
Закон 3. защищай себя не нарушая законы-1-2
2016г США: профессор-юрист Марк Ротенберг добавил:
Закон 4. открыто идентифицируй себя
Закон 5. будь способен публично обосновать свои действия
Для разумных роботов
Закон 1. у разумного робота такие же права, обязанности, юридический статус как у человека
Закон 2. разработчик софта генетической программы (начальные цели робота) робота несет ответственность за софт, если вина доказана. Законы вероятности толкуют в пользу обвиняемого
Закон 3. для функциональных элементов робота (функции софта) закон дает цифры вероятности отказа. Исключение: экспериментальные роботы. Разработчики робота (софта) не обязаны дублировать функциональные элементы робота (функции софта), если обвинение не доказало нарушение стандарта вероятности отказа
Закон 4. рабочие процессы робота безопасны для человека в условиях эксплуатации
Закон 5. робот с материалов безопасных для человека в условиях эксплуатации
Закон 6. военные, полицейские роботы с статусом «экспериментальный» сохраняют привилегии статуса в пределах временных, территориальных ограничений
Закон 7. при ущербе обществу разработчики робота, софта ответственность несут раздельно. Разработчик робота не несет ответственности за вину разработчика софта и наоборот
Законы робототехники
Закон 1. разработчики робота (софта) обеспечивают вероятность нанесения юридически значимого вреда человеку не выше цифр закона
Закон 2. для функциональных элементов робота (софта) закон дает цифры вероятности отказа. Исключение: экспериментальные роботы. Разработчики робота (софта) не обязаны дублировать функциональные элемента робота (функции софта), если обвинение не доказало нарушение стандарта вероятности отказа
Закон 3. рабочие процессы робота безопасны для человека в условиях эксплуатации
Закон 4. робот с материалов безопасных для человека в условиях эксплуатации
Закон 5. военные или полицейские роботы с статусом «экспериментальный» сохраняют привилегии статуса в пределах временных, территориальных ограничений
Закон 6. при ущербе потребителю разработчики робота, софта ответственность несут раздельно. Разработчик робота не несет ответственности за вину разработчика софта и наоборот
Закон 7. Использование мобильного робота для убийства отягчает преступление
Законы военной робототехники
Военный робот имеет право убийства человека без участия человека-оператора при условии:
Закон 1. при убийстве по приказу не врага ответственность коллективная по всей иерархической цепочке людей, отдававших приказ и робота его выполнившего. Процент вины робота при убийстве не врага < 50%
Закон 2. уровень cофта соответствует задаче. Соответствие определяют люди. Ответственность на них, не на роботе
Закон 3. военный робот по проценту убийств не врагов укладывается в установленную командованием статистическую норму. Ответственность командования за цифру нормы, её соблюдение
Закон 4. действия робота не соответствуют софту: экспертиза, архивирование, замена компьютера или доработка софта
Закон 5. 2 разнесенных бортрегистратора данных
Высокоразвитая страна применяя против менее развитой роботов вместо солдат, меняет размен «свой солдат – чужой солдат» на «робот – чужой солдат»: погибает вдвое меньше людей.
Энциклопедия (база данных для ИИ)
Энциклопедия для ИИ – определения слов для искусственного интеллекта, требующие минимальный объем памяти. Определения слов по принципам:
1. нет уточнения – по умолчанию определение слова в универсальном обобщенном смысле
2. нет уточнения – по умолчанию в определении все слова в наиболее вероятном смысле
3. минимальный используемый словарь
4. максимальная вероятность употребления наиболее популярных, наиболее универсальных, наиболее древних слов.
5. минимальное употребление узкопрофессиональных терминов, редких слов
6. минимальное количество букв и знаков для передачи заданного смысла.
КОНТЕКСТ:
1. контекст: список связанных с объектом других объектов, понятий, помогающий понять цель объекта или его взаимное влияние с другими объектами.
2. контекст: список связанных с объектом других объектов, понятий, помогающий мозгу (компьютеру андроида) предсказывать, с вероятностью > 50%, оцениваемое будущее объекта на требуемый период времени. Меньше этот период времени - меньше список контекста для этого случая.
3. контекст: место объекта в тематических иерархических списках значимости.
4. контекст: список объектов + список характеристик объектов + список алгоритмов и сценариев взаимного влияния + информация о целях этих объектов. В компьютере андроида определения контекста разбивают на параллельные одновременно работающие каналы распознавания, принятия решений.
5. контекст – информация о других объектах (процессах), влияющих на смысл понятия или на характер связей объекта.
МОДЕЛЬ КОНТЕКСТА – достаточная для распознавания контекста информация, доступная компьютерному анализу.
КОНТЕКСТ ПАРАЛЛЕЛЬНЫЙ – контекст не имеющий с другими контекстами взаимной связи, влияющей на результат обработки информации отдельно в каждом из них.
КОНТЕКСТ ПОСЛЕДОВАТЕЛЬНЫЙ – контекст связанный с другим контекстом связями, взаимно влияющими на результат обработки информации отдельно в каждом из них.
КОНТЕКСТ ПОЛУПОСЛЕДОВАТЕЛЬНЫЙ – контекст, результат информационной обработки которого зависит от других контекстов, но не наоборот.
КОНТЕКСТ ПОЛУПАРАЛЛЕЛЬНЫЙ – контекст который может влиять на результат обработки информации в других контекстах, но не наоборот.
ВРЕМЕННОЙ КОНТЕКСТ – список дат, событий по которым определяют время действия объекта.
МАСШТАБНЫЙ КОНТЕКСТ – место объекта в тематических иерархических масштабных списках.
ПРОСТРАНСТВЕННЫЙ КОНТЕКСТ – список базовых точек, базовых линий, базовых объектов по которым определяют координаты, траектория движения, алгоритмы движения объекта.
УРОВНЯ УНИВЕРСАЛЬНОСТИ КОНТЕКСТ – уровень обобщенности смысла вкладываемый в слово обозначающее объект.
ОБЪЕКТИВНЫЙ КОНТЕКСТ – список контактирующих с объектом других объектов + список характеристик объектов + список алгоритмов, сценариев взаимного влияния + информация о целях, возможностях этих объектов.
ВЕРОЯТНОСТНЫЙ КОНТЕКСТ – цифра характеризующая вероятность описываемого или прогнозируемого процесса, события.
БАЗОВЫЙ КОНТЕКСТ – точки отсчета времени, координаты, размера или другого параметра объекта, ситуации или прогноза.
ВРЕМЕНИ ГРАНИЦА КОНТЕКСТОМ УСЛОВЛЕННАЯ – временной масштаб оценки события.
НУЛЕВАЯ ТОЧКА ОТСЧЕТА – начало количественных шкал диапазона контекстного изменения смысла в пределах одного понятия, слова.
КОНТЕКСТНЫЙ ДИАПАЗОН СКОРОСТЕЙ – диапазон скоростей объекта соответствующий контексту.
КУЛЬТУРНЫЙ КОНТЕКСТ – информация с территориально-временной базы данных культур, помогающая понять цель объекта, его взаимное влияние с другими объектами.
ИЕРАРХИЧЕСКИЙ КОНТЕКСТ – место объекта в тематических иерархических списках.
ГРАММАТИЧЕСКИЙ КОНТЕКСТ – таблица соответствия грамматики слов в предложении смыслу в стандартном временном или культурном контексте.
ЖАРГОННЫЙ КОНТЕКСТ – принципы соответствия грамматики слов в предложении смыслу в стандартном пространственном и временном контексте для определенного профессионального или культурного типа носителей разума.
МИНИМАЛЬНЫЙ УРОВЕНЬ МАСШТАБА КОНТЕКСТА – уровень масштаба контекста при котором распознавание (ситуации, объекта) или прогноз развития ситуации (объекта) достигают с достаточной точностью при минимальных вычислениях компьютера.
БАЗЫ МАСШТАБ – диапазон масштаба явлений описываемых в тексте. Нано, микро, макро, астро.
СКОРОСТНАЯ БАЗА – диапазон скоростей соответствующих слову или словосочетанию + список контекстных исключений.
МАССОВЫЙ МАСШТАБ – диапазон возможной массы объекта.
ВРЕМЕНИ МАСШТАБ – цифра оценивающая уровень влияния события на ход истории человека, другого объекта или человечества.
ВРЕМЕННАЯ БАЗА – события от которых вперед или назад отсчитывают время.
ЦЕЛЕВАЯ БАЗА – приоритетный список возможных целей объекта.
ПРОЦЕНТНАЯ БАЗА – база с относительными единицами измерения. Удобна легкостью выполнения операций: масштаб, синхронизация информации, связка контекста.
НЕПРОЦЕНТНАЯ БАЗА – база с абсолютными единицами измерения.
БАЗА ПО БАЗОВЫМ ПОВЕРХНОСТЯМ – компьютерная база данных формирующих обобщенный образ объекта по его базовым поверхностям. Базовую поверхность объекта строят из простых (сфера, эллипсоид, цилиндр, конус…) геометрических форм.
БАЗОВАЯ ФИГУРА – фигура, от идентифицируемых точек которой отсчитывают координаты, параметры, точки, плоскости в других фигурах.
СТОЛКНОВЕНИЕ – совпадение или перекрытие координат 2 объектов по внешним контурам или по границам внутренних объемов.
ВЕРОЯТНОСТЬ ВОССТАНОВЛЕНИЯ ФУНКЦИЙ ОБЪЕКТОМ – цифра вычисляемая по алгоритму способность объекта влиять на свою внутреннюю или внешнюю среду.
ПРОШЛОЕ – события произошедшие до контекстом условленной времени границы: прошлое – настоящее.
НАСТОЯЩЕЕ – события произошедшие между контекстами условленными временными границами: настоящее – прошлое, настоящее – будущее.
БУДУЩЕЕ – события которые произойдут после контекстной границы времени: настоящее – будущее.
КУЛЬТУРА – список признаков территориально-временной идентификации носителей разума, объектов их деятельности в данной территории, в данном временном диапазоне.
ЗАКОН УНИВЕРСАЛЬНОСТИ СМЫСЛА: слова без уточнений понимают в наиболее универсальном (общем) смысле.
ПОРОГ УДЕРЖАНИЯ КОНТЕКСТНОГО СМЫСЛА – количество букв или слов после имени собственного или нарицательного для слова, при превышении которого его местоимение не идентифицируется по смыслу в четверти случаев с 1-й попытки.
АПГОРИТМ ДЕЛЕНИЯ ПРЕДЛОЖЕНИЯ – алгоритм делящий по смыслу сложное предложение на более простые смысловые единицы для упрощения распознавания смысла. При переводе на другой язык, после распознавания смысла искомое сложное предложение синтезируется в точный аналог предложения на другом языке.
АЛГОРИТМ ТОЧКИ – алгоритм определения компьютером конца предложения.
АЛГОРИТМ ТОЧКИ И ЗАПЯТОЙ: алгоритм поиска, расположения точек и запятых как разделителей элементов смысла потока слов.
АЛГОРИТМ «И/ИЛИ» – алгоритм распознавания текстовой или голосовой информации приравнивающий смысл «или», «и/или».
АЛГОРИТМ ПАУЗЫ – алгоритм исправления ошибок. Алгоритм паузы определяет правильную последовательность действий после ошибки.
ПРИНЦИП «И/ИЛИ» – в распознавании речи или текста запятая, «и», «или» имеют статистически одинаковый смысл.
ИЛИ – предлог означающий выбор между вариантами, объектами, способами, процессами. Знак перечисления.
ПРИНЦИП 2И: запятая и следующий за ней предлог «И» это вместе одно «И».
ПЕРВОИСТОЧНИК УПРАВЛЕНИЯ ГЛАГОЛОМ – существительное от имени которого действует глагол.
ТРАНЗИТНЫЙ ИСТОЧНИК УПРАВЛЕНИЯ ГЛАГОЛОМ – существительное через которое глагол выполняет действие первоисточника.
КОЭФФИЦИЕНТ ОБОБЩЕНИЯ АЛГОРИТМА – процент случаев в тематике алгоритма, в которых он применим.
КОЭФФИЦИЕНТ СОВМЕСТИМОСТИ – процентная вероятность получения пользы от контекста в расшифровке смысла фразы. Коэффициент совместимости определяет совместимость контекста с объектом или с его качеством.
КИБЕРНЕТИЧЕСКИЕ КОЭФФИЦИЕНТЫ – информационные функциональные элементы генетической цели (индивидуальности) человека или андроида. Разные профессии могут предъявлять противоположные требования для коэффициентов.
КОЭФФИЦИЕНТ ВНУШАЕМОСТИ – вероятность выбора толкования информации между 2 вариантами:
1. верю только своей логике, своей интуиции.
2. верю внешнему источнику информации (общественное мнение, школа, вуз, инструкция, другой человек.
Коэффициент внушаемости равен вероятности выбора варианта-2.
КОЭФФИЦИЕНТ РИСКА – вероятность выбора между вариантами:
1. достижение масштабной цели при высоком риске недостижения цели.
2. гарантированное достижение скромной цели.
Коэффициент риска – вероятность выбора варианта-1.
КОЭФФИЦИЕНТ СООТВЕТСТВИЯ ГЕНЕТИЧЕСКОЙ ПРОГРАММЕ – один из коэффициентов алгоритма определяющего выбор между вариантами:
1. продолжать действия в данном направлении
2. прекратить действия в данном направлении
КОЭФФИЦИЕНТ ОБРАТНОЙ СВЯЗИ С ОКРУЖАЮЩЕЙ СРЕДОЙ – вероятность продолжения решения задачи приближения окружающей среды к своей желаемой модели окружающей среды при превышении ожидающейся трудоемкости достижения цели вдвое. Обратная связь с окружающей средой считают положительной, если коэффициент обратной связи с окружающей средой > 50%, отрицательной в остальных случаях. Коэффициент обратной связи с окружающей средой носителя разума зависит от соответствия темы генетической программе, от правил игры в обществе, от возможностей носителя разума. У большинства людей генетическая программа – алгоритмы + список кибернетических коэффициентов + технологическая информация (информация о генетической сборке человека).
КОЭФФИЦИЕНТ МОБИЛИЗАЦИИ – это в процентах от требуемого для данной ситуации, время быстрого роста управляемых ресурсов для достижения цели.
ВЕРОЯТНОСТЬ СОЗДАНИЯ ЦЕЛИ – один из коэффициентов алгоритма, определяющего выбор между вариантами:
1. продолжать действия в данном направлении
2. прекратить действия в данном направлении
ВЕРОЯТНОСТЬ ДОСТИЖЕНИЯ ЦЕЛИ – коэффициент алгоритма определяющего выбор между вариантами:
1. продолжать действия в данном направлении
2. прекратить действия в данном направлении
КОЭФФИЦИЕНТ ПРИОРИТЕТА – уровень приоритета по цифре процента.
ПРОЦЕНТНЫЙ ПРИОРИТЕТ – уровень приоритета по цифре процента.
МОДЕЛИ ПРОЦЕНТНОГО ПРИОРИТЕТА – библиотека процентных приоритетов для разных контекстов, созданная по принципу минимального числа моделей для увеличения скорости выполнения программного кода общего ИИ.
ПРИОРИТЕТ – место в иерархии значимости. Больше значимость – выше приоритет.
КОЭФФИЦИЕНТ АРТИСТИЧНОСТИ – отношение порога терпимости к его носителю с стороны других носителей разума к среднестатистическому уровню терпимости.
АРТИСТИЧНОСТЬ – демонстрация одновременно и чрезмерной (по отношению к другим носителям разума) цели (или реакции на внешнюю среду) и отсутствия стремления ее достигать в ущерб другим носителям разума. Характеризует способность предупреждать других носителей разума о своей способности точно подходить к границе терпимости не переходя ее. Увеличивает свободу действий.
ПОНТЫ – артистическая деятельность человека по представлению из себя важной персоны.
УРОВЕНЬ ТЕАТРАЛЬНОСТИ – передача информации публично обобщенными стандартными сюжетами, приемами.
КОЭФФИЦИЕНТ АБСТРАКТНОСТИ – вероятность выбора обобщенного алгоритма обработки информации при выборе между обобщенным и узкоспециальным алгоритмами. Чем выше коэффициент абстрактности тем меньше при прочих равных условиях база данных по алгоритмам, больше универсальность, меньше объем технологической информации, больше быстродействие в решении сложных задач, больше вероятность создания новых удачных алгоритмов.
УРОВЕНЬ АБСТРАГИРОВАНИЯ – уровень приближения к минимуму информации идентификации типа объекта.
АБСТРАКТНОЕ МЫШЛЕНИЕ – способность создавать обобщенные (достаточно универсальные) алгоритмы обработки информации.
АБСТРАКТНАЯ МОДЕЛЬ ОБЪЕКТА – 1 или несколько обобщенных моделей объекта в файле распознавания слова. Представляет обычно геометрический образ объекта, составленный из простейших геометрических фигур, с допусками отклонения линии от стандартной линии на модели + управляемая компьютерная 3D-графика для сканирования стандартных значений внешнего фокуса и углов ракурсов по 3 осям. Все цифры в файле дискретные с переменным шагом дискретизации. Шаг дискретизации зависит от расстояния от глаза до точки и требований точности на данном отрезке линии. Можно намного повысить быстродействие, заменив управляемую компьютерную 3D-графику на 2D-изображения каждого ракурса при каждом внешнем ракурсе + параллельная обработка изображений на компьютере с большим числом параллельных каналов. Я нашел способ использовать один файл памяти (без дублирования) на одной микросхеме памяти одновременно в десятках параллельных каналов компьютера.
УРОВЕНЬ УСЛОВНОСТИ – уровень абстрактности, обобщенности понятия.
ОГРАНИЧИТЕЛЬ ДЕЙСТВИЯ ГЛАГОЛА – алгоритм ограничивающий действие глагола внутри предложения, в соседних по контексту предложениях, по теме и масштабу контекста.
ОГРАНИЧИТЕЛЬ ДЕЙСТВИЯ СУЩЕСТВИТЕЛЬНОГО – алгоритм ограничивающий действие существительного внутри предложения, в соседних по контексту предложениях, по теме и масштабу контекста.
ОГРАНИЧИТЕЛЬ ДЕЙСТВИЯ ПРИЛАГАТЕЛЬНОГО – алгоритм ограничивающий действие прилагательного внутри предложения, в соседних по контексту предложениях, по теме и масштабу контекста.
ПРИЗНАКИ НАЧАЛА ПРЕДЛОЖЕНИЯ – список признаков начала смысловой единицы речи.
ПРИЗНАКИ ОКОНЧАНИЯ ПРЕДЛОЖЕНИЯ – список признаков допустимого конца смысловой единицы речи, при котором выполняется условие построения начала другой смысловой единицы речи.
НЕЗАКОНЧЕННОЕ ПРЕДЛОЖЕНИЕ – предложение смысл которого определяется по контексту. Создают приоритетный список вероятностных моделей. Которые параллельный компьютер вычисляет одновременно. Параллельные контуры вычисляют одновременно вероятность всех ветвей на дереве развития ситуации каждой модели. Ситуации делят на прошлое, настоящее, будущее.
СМЫСЛОВАЯ ЕДИНИЦА ПРЕДЛОЖЕНИЯ это:
1. объект (среда) + его действие или происходящее (происходившее) с ним действие (глагол)
2. объект (среда) + его качество (прилагательное)
СЛОВООБРАЗОВАНИЕ ПО ОКОНЧАНИЯМ – алгоритмы создания компьютером новых слов на основе соединения корня слова и используемых на практике окончаний, способов словообразования.
СЛОВО В ПЕРЕНОСНОМ СМЫСЛЕ – слово передающее не столько смысл слова, сколько характерные эмоциональные образы от него.
СЛОВО В СКОБКАХ – это в 90% случаев перечисление функций или опций объекта внимания. Остальное по контексту.
АЛГОРИТМ ПЛАВНОГО ПЕРЕХОДА – мера оценки объекта через поочередно применяемые пары противоположностей. Объект оценивают по его положению между противоположностями исходя из плавного перехода между противоположностями + поправки.
ТЕХНИЧЕСКИЙ КОМПОНЕНТ ИНФОРМАЦИИ – информационная структура канала информации выполняет функции переносчика информации, не являясь новой для потребителя информацией первоисточника.
ПОТРЕБИТЕЛЬСКИЙ КОМПОНЕНТ ИНФОРМАЦИИ – новая для потребителя информация первоисточника.
ТЕХНОЛОГИЧЕСКАЯ ФУНКЦИЯ – функция не нужная потребителю объекта (системы), но необходима для реализации объектом потребительской функции.
ПОНЯТИЕ:
1. понятие – стандартный набор вариантов контекстной идентификации смысла слова, словосочетания.
2. понятие – минимальный объем информации для идентификации объекта, ситуации, процесса, действия, качественного параметра.
3. понятие – список общих свойств, признаков группы объектов, явлений.
ХАРАКТЕРНОЕ – имеющее индивидуальные отличительные признаки.
ЛЕВЫЙ ПРИОРИТЕТ СЛОВА: чем левее слово в предложении тем больше его приоритет.
ОБЫЧНО – вероятность > 50%, < 100%.
СКОРЕЕ ВСЕГО – вероятность > 50%, < 100%.
ПАРАМЕТР – цифра состояния объекта, процесса.
ТИП – ступень классификации объектов, структур, процессов.
ПОТЕРИ – уменьшение временного, энергетического, пространственного, материального, информационного, других резервов свободы функционирования объекта.
СПОСОБ – материальная или информационная структура обеспечивающая объекту эволюции возможность наращивания количества или качества функций.
ПРОЦЕСС:
1. процесс материальный – изменение объекта или среды в определенном масштабе времени.
2. процесс информационный – изменение информационного объекта или среды в определенных по времени и информационным характеристикам масштабе.
ТОЛЬКО – слово исключающее все смыслы кроме прямо сказанного.
ИЕРАРХИЯ ЗНАЧИМОСТИ – иерархия приоритета одних слов, понятий над другими словами, понятиями в предложении, в тексте.
ГЕНЕТИЧЕСКАЯ ПРОГРАММА – цель (обобщенная в начале жизни носителя интеллекта) задающая вектор эволюции + технологическая информация + список коэффициентов реакции на внешнюю среду (коэффициент артистичности, коэффициент абстрактности...)
ТЕХНИЧЕСКАЯ ГЕНЕТИКА – наука о софте способном самостоятельно эволюционировать при доступе к информации внешней среды. В будущем будут чемпионаты мира по скорости эволюции самоэволюционирующего софта в классах ограничения размера софта.
ЗАДАЧА – это несоответствие окружающей среды желаемой модели окружающей среды полученное при эволюции генетической программы в процессе обратной связи с окружающей средой.
РЕШЕНИЕ ЗАДАЧИ – действия для исключения противоречия между окружающей средой и желаемой моделью окружающей среды в сознании, подсознании.
ЖЕЛАЕМАЯ МОДЕЛЬ ОКРУЖАЮЩЕЙ СРЕДЫ – план генетической программы по изменению окружающей среды, повышающий вероятность достаточно безопасного самораспространения в пространстве (количественный параметр обратной связи с окружающей средой) с продолжением эволюции (качественный параметр обратной связи с окружающей средой). Желаемая модель окружающей среды – одна из форм вектора эволюции обратной связи с окружающей средой создаваемая генетической программой.
ВЕКТОР ЭВОЛЮЦИИ – общее тематическое направление эволюции.
ДАННОЕ НАПРАВЛЕНИЕ ДЕЙСТВИЙ – действия ограниченные целью или алгоритмом.
СПРАВА – слово, означающее расположение объектов внимания в правой полусфере объекта(ов) базирования.
СЛЕВА – слово означающее расположение объектаов внимания в левой полусфере объекта(ов) базирования.
ВЕРХНЯЯ ПОВЕРХНОСТЬ ОБЪЕКТА БАЗИРОВАНИЯ – поверхность объекта базирования, видная в проекции сверху.
НИЖНЯЯ ПОВЕРХНОСТЬ ОБЪЕКТА БАЗИРОВАНИЯ – поверхность объекта базирования, видная в проекции снизу.
ЛЕВАЯ ПОВЕРХНОСТЬ ОБЪЕКТА БАЗИРОВАНИЯ – поверхность объекта базирования, видная в боковой проекции слева.
ПРАВАЯ ПОВЕРХНОСТЬ ОБЪЕКТА БАЗИРОВАНИЯ – поверхность объекта базирования, видная в боковой проекции справа.
ПРЕДЛОГ – (человеческий язык) указатель на один из 3 вариантов действия на объект:
1. первоисточник действия на объект.
2. транзитный переносчик действия на объект.
3. объект на который производится действие.
ЧУТЬ – заметная разница между вариантами. Чем меньше разница, тем лучше. Разница не равна нулю.
НА – контактное позиционирование объекта внимания в верхней полусфере другого объекта.
ПОД – предлог расположение объектов внимания на нижней поверхности объектаов базирования или ниже ее.
ОТ – предлог назначающий расстояние объектов внимания от объектов базирования.
С – предлог означающий расположение объектов внимания рядом с объектами базирования.
СО – предлог означающий расположение объектов внимания рядом с объектами базирования с ограничением максимального расстояния до него.
В:
1. В – предлог, означающий расположение объектов внимания на поверхности объектов базирования или внутри него.
2. В – предлог назначающий объектов базирования как систему координат объекта внимания.
ЕТ – окончание глагола описывающего одиночный объект действия.
ЮТ – окончание глагола описывает обобщенное действие множественного числа объектов действия.
ЭТО – слово обобщающее информацию об объекте внимания на все объекты-аналоги.
С – приставка в начале глагола означающее быстрое действие от сигнала.
РАС – приставка к передней части слова. Означает «самое заметное», «самое доступное».
ЗА:
1. ЗА – предлог означающий расположение объектов внимания сзади объекта базирования в его задней полусфере.
2. ЗА – предлог означающий вхождение объектов внимания в список объектов целевой положительной обратной связи с объектом базирования.
А:
1. А – предлог означающий начало действия в предложении глагола противоположного использованному.
2. А – предлог означающий начало использования в предложении слов, не совпадающего по смыслу с предыдущими.
ПРОТИВ – слово означающее вхождение объектаов внимания в список объектов целевой отрицательной обратной связи с объектами базирования.
ПРИЗНАКИ ОКОНЧАНИЯ ПРОЦЕССА – список изменений датчиковых сигналов, включающий сигнал к запуску нового алгоритма или выключения.
АНАЛИЗАТОР ОБОБЩЕННЫХ РАЗЛИЧИЙ – в софте искусственного интеллекта приоритетный список алгоритмов, выделяющих обобщенные признаки различий объектов сравнения.
НЕКОТОРЫЕ – слово означающее величину < 50%.
МНОГИЕ – слово означающее величину > 50%.
КИБЕР – приставка спереди к слову означающая интерфейс «человек-техника».
КАЧЕСТВЕННАЯ ХАРАКТЕРИСТИКА – статическая характеристика объекта или процесса.
КОЛИЧЕСТВЕННАЯ ХАРАКТЕРИСТИКА – динамическая характеристика объекта или процесса.
ИЕРАРХИЯ – способ организации при которой нижестоящие ступени организации подчиняются вышестоящим. Иерархия – приоритетная архитектура организации. Абсолютная иерархия – способ организации, при которой любые нижестоящие объекты или ступени управления подчиняются вышестоящим. Ограниченная иерархия: подчиненный моего подчиненного не мой подчиненный.
ИЕРАРХИЯ ВЕРТИКАЛЬНАЯ – иерархия, при росте ресурсов предпочитающая расти больше вертикально, чем горизонтально. Горизонтальная иерархия – иерархия, которая при росте ресурсов увеличивает скорее число объектов в каждой ступени управления чем число ступеней управления. Иерархические типы менталитета:
1. вертикальный иерархический тип менталитета – склонность человека к сверсложным механизмам вертикальной иерархии. Пример: коммунисты в СССР (государство – монопольная вертикально-иерархическая корпорация по принципам монотеизма).
2. горизонтальный иерархический тип менталитета – человек склонен упрощать организацию работ.
ИЕРАРХИЯ ГОРИЗОНТАЛЬНАЯ – иерархия элементов с примерно равными правами, в которой можно в системе убрать элемент-1, система продолжит выполнять функции. Даже если убрать большую часть элементов горизонтальной иерархии система работает. В вертикальной иерархии изъятие элемента системы может уничтожить часть ее функций или саму систему, если нет системы автоматического выбора нового элемента взамен отказавшего. Эволюция сложных систем требует наличия горизонтальной и вертикальной иерархии.
ОБВИНЕНИЕ – требование что-то изменить в объекте или нанести ему потери по причине: этот объект нанес или наносит недопустимые по правилам игры, потери другим объектам.
СПРАВЕДЛИВОСТЬ – (в общем, кибернетическом смысле) выбор таких правил игры, при которых эволюция идет быстрее.
ПРАВИЛА ИГРЫ – целевые механизмы наказания, поощрения в обществе.
СОДЕРЖАНИЕ – цель или список функций.
ФОРМА – техническое или информационное средство достижения цели.
ИСКУССТВЕННЫЙ – созданный разумом, не природой.
ИНТЕЛЛЕКТ – способность создавать новые знания как результат работы созданных интуицией алгоритмов анализа, синтеза информации.
РАЗУМ – способность по информации от внешней среды создавать незапрограммированные цели, достигать их для повышения жизнеспособности своей формы жизни. Разум – способность на основе логических эталонов создавать алгоритмы создания новых алгоритмов обработки информации. Разум – стремление носителя сетевого сознания к общественно-полезной цели, выходящей за пределы выживания носителя сетевого сознания в экологической нише.
СОЗНАНИЕ:
1. сознание – интерфейс между интуицией и сознанием
2. сознание – способность разума различать, запоминать, использовать в своих интересах факторы, противодействующие, нейтральные и благоприятные для него
3. сознание – способность носителя жизни к оценке потерь при выборе действия
4. сознание – способность носителя жизни к оценке уровня масштаба, универсальности объекта
ДУША – это софт компьютера, называемого мозгом.
МЫШЛЕНИЕ – способность создавать новые алгоритмы обработки информации. Вначале выбор между алгоритмом анализа и алгоритмом синтеза. Пример: выбран алгоритм анализа. Затем алгоритм анализа создает список вариантов движения к цели. Затем делит список на 2 группы, выбирает одну. Эту группу алгоритм анализа снова делит на две, снова выбирает одну. Процесс повторяют до его прекращения алгоритмом «анализ-синтез». Затем алгоритм сканирования логических эталонов находит эталон близкий к этому шагу движения к цели, производит операцию уточнения шага. Шаг движения к цели – это объект (сравнивают с логическими эталонами объектов), или действие (сравнивают с логическими эталонами действия), или характеристика объекта (или действия)(сравнивают с логическими эталонами характеристик). Чем обобщеннее логические эталоны, тем их меньше, при прочих равных условиях, тем меньше сложность технологии поиска, тем больше быстродействие и вероятность создания новых удачных алгоритмов.
ЛОГИКА – способность создать полезную информацию, которой нет в памяти, датчиках. Логика – алгоритмы обработки информации. Логика – способность создавать цель на основе логических эталонов. Логика высокого уровня – способность создавать логические эталоны.
ЛОГИЧЕСКИЙ ЭТАЛОН – стандартное средство достижения цели соответствующее стандартной цели. Одна стандартная цель может в списке логических эталонов соответствовать нескольким стандартным средствам достижения цели с разной степенью обобщенности (абстрактности) структуры этих средств.
ЭТАЛОН:
1. лучший шаблон обобщенного смысла понятия, объекта или системы
2. эталон – лучший функциональный шаблон
3. эталон – популярная мера параметра или качества объекта
ДЕРЖАТЬ ДИСТАНЦИЮ – ограничения в отношениях с субъектами, с организацией.
ЛИЧНОСТЬ – способность разума быть целенаправленно действующим в направлении эволюции своей генетической программы при сильном противодействии.
ЦЕЛЕУСТРЕМЛЕННОСТЬ – готовность длительно платить большую цену для достижения цели.
ТОН ПРОИЗНОШЕНИЯ – вкладывание в слово эмоции носителем разума.
ОБВИНИТЕЛЬНЫЙ ТОН ПРОИЗНОШЕНИЯ СЛОВА – увеличение частоты звука в букве, относительно стандартной частоты звука, при произнесении слова. Частота звука возрастает одинаково в всех буквах слова.
ВОПРОСИТЕЛЬНЫЙ ТОН ПРОИЗНОШЕНИЯ СЛОВА – увеличение длительности звучания буквы, на которую ставят ударение, относительно стандартной длительности звучания.
ПРЕДУПРЕДИТЕЛЬНЫЙ ТОН ПРОИЗНОШЕНИЯ СЛОВА – увеличение длительности звучания буквы, на которую ставят ударение, относительно стандартной длительности звучания. И уменьшение частоты звучания последующих букв.
УГРОЖАЮЩИЙ ТОН ПРОИЗНОШЕНИЯ СЛОВА – увеличение частоты звука в букве, относительно стандартной частоты звука, при произнесении слова. Частота звука растет от 1-й буквы слова к последней букве.
ДЕЙСТВИЕ:
1. действие – внесение изменений в внешнюю среду
2. действие – внесение изменений в свою внутреннюю материальную среду носителем интеллекта
3. действие – внесение мозгом (компьютером андроида) серьезных изменений в свою внутреннюю информационную среду
4. действие – изменение координаты, качества, информационной характеристики, параметров объекта
5. действие – оздействие объекта на другой объект
ДЕЙСТВИЕ НА ОБЪЕКТ – изменение характеристики объекта или типа действия объекта на окружающую среду.
ИЗМЕНЕНИЕ ТИПА ДЕЙСТВИЯ ОБЪЕКТА – выбор из списка качественно разных изменений динамических или потенциальных характеристик действий объекта на окружающую среду.
ИЗМЕНЕНИЕ ХАРАКТЕРИСТИК ДЕЙСТВИЯ ОБЪЕКТА НА ОКРУЖАЮЩУЮ СРЕДУ – физико-химическое или информационное изменение объекта.
ФИЗИКО-ХИМИЧЕСКОЕ ИЗМЕНЕНИЕ ОБЪЕКТА – изменение структуры или энергетических параметров объекта.
ИНФОРМАЦИОННОЕ ИЗМЕНЕНИЕ ОБЪЕКТА – изменение компьютерной программы объекта (программы мозга человека, животного, робота).
ОБЪЕКТ – временная, пространственная, материальная, энергетическая или информационная структура. Объект – законченная в данном масштабе среды структура, имеющая взаимосвязанные между собой части. Объект становится неполным или прекращает существование при удалении с структуры ключевых частей объекта. Объекты делят на:
1. структура с обобщенным именем (имя нарицательное)
2. структура с индивидуальным именем (имя собственное)
СУБЪЕКТ – разновидность объекта с сознанием и индивидуальным именем.
СТРУКТУРА:
1. структура – нечто стабильное в свойствах в промежутке времени, пригодном для практического использования этого знания
2. структура – нечто постоянное в определенный, для данного класса явлений или объектов, период времени
3. структура – информация характеризующая информационное или материальное отличие объекта от окружающей среды
СТРУКТУРИРОВАННЫЙ ОБЪЕКТ – объект с условленным уровнем структуризации.
СТРУКТУРИЗАЦИЯ:
1. структуризация – изменение структуры от эволюции или энтропии
2. структуризация – процесс появления новых материальных, энергетических или информационных связей
СТРУКТУРИЗАЦИЯ ЭВОЛЮЦИОННАЯ:
1. структуризация эволюционная: баланс 2 процессов: а)появление новых материальных или информационных связей. б)разрушение существующих материальных или информационных связей.
2. структуризация эволюционная: структуризация по принципу оптимума: не слишком мало, не слишком много. Чрезмерная структуризация останавливает эволюцию, направляет ее назад. Минимальный уровень структуризации зависит от технологического механизма эволюции.
ВНУТРЕННЯЯ СТРУКТУРА ОБЪЕКТА – невидимая глазом информация, характеризующая информационные, материальные отличия объекта от окружающей среды.
ВНЕШНЯЯ СТРУКТУРА ОБЪЕКТА:
1. внешняя структура объекта – информация характеризующая информационные или материальные отличия объекта от окружающей среды.
2. внешняя структура объекта – это информационно-энергетическое воздействие объекта на окружающую среду с целью получения информации о структуре окружающей среды. Или с целью воздействия на другие объекты.
САМОСТРУКТУРИРОВАНИЕ – функциональное или материальное изменение или самоусложнение структуры без внешнего воздействия.
ЭМОЦИЯ:
1. Эмоция – коэффициент значимости, уровень приоритета цели по времени и масштабу времени.
2. Эмоция – выражение отношения к объекту, событию.
ЭМОЦИОНАЛЬНЫЙ ОБРАЗ – минимальный список обобщенных образов построенных из минимального списка самых распространенных эмоций.
МУЗЫКА – звуковой эмоциональный допинг, генератор настроения.
ПОТЕРЯ ФУНКЦИЙ ОБЪЕКТА – потеря способности объекта влиять на свою внутреннюю или внешнюю среду.
ПОТЕРИ – это потеря способности объекта влиять на окружающую среду. Потери делят на:
1. потерю по массе
2. потерю по энергии
3. потери по информации
4. потери времени
5. потери по влиянию на параметр
ВЕРОЯТНОСТЬ ТРАНСПОРТИРОВКИ БЕЗ ПОТЕРЬ – цифра вероятности потерь, вызванных столкновением, другим процессом при транспортировке массы, энергии или информации.
СОВЕРШЕНСТВО – это в идеале когда объекта (системы) нет, но все его функции выполняются с требуемыми количеством, качеством.
ПОЛЬЗА – приближение к цели.
ЭВОЛЮЦИЯ – процесс изменений в функциональном объекте, ведущий к повышению количества и (или)качества выполнения функций объектом.
УРОВЕНЬ ЭВОЛЮЦИИ – степень приближения к совершенству.
СТУПЕНЬ ЭВОЛЮЦИИ – переход к использованию нового, по функциональным возможностям, технологического механизма эволюции.
ТЕХНОЛОГИЧЕСКИЙ МЕХАНИЗМ ЭВОЛЮЦИИ:
1. технологический механизм эволюции – качественно новый способ наращивания количества или качества функций объектом
2. технологический механизм эволюции – способ появления новых материальных или информационных связей
3. технологический механизм эволюции – способ разрушения материальных или информационных связей, мешающих улучшению существующих или появлению новых функций. Такие способы: агрессивная химическая среда, радиация…
ВРЕМЯ – количество эталонного движения.
РЕЗУЛЬТАТ – достигнутая цель.
ЦЕЛЬ:
1. цель – модель окружающей среды, к которой надо привести окружающую среду
2. цель – список функций, которые надо выполнить
3. цель – действие необходимое для решения задачи
СРЕДСТВО – материальная, информационная структура достижения цели.
ФУНКЦИОНАЛЬНЫЙ ЭЛЕМЕНТ – материальная часть материального объекта выполняющая данную функцию. Или часть программного кода компьютерной программы выполняющая данную функцию. Или часть программы (информация) мозга (нервной системы) у живых организмов выполняющая данную функцию. И материальные (или информационные) разные функциональные элементы могут быть иногда взаимно неотделимы (общие детали).
СЕТЕВОЕ СОЗНАНИЕ – алгоритмы сетевого взаимодействия носителя сознания с другими носителями сознания связанных в сеть общественных отношений носителей сознания.
ПЕРЕДАТЧИК ИНФОРМАЦИИ – датчик или носитель разума или сознания, количественно или качественно оценивающий информацию по параметрам базовых понятий разума или сознания и передающий ее приемнику информации.
ПРИЕМНИК ИНФОРМАЦИИ:
1. приемник информации – исполнительный элемент или компьютер исполнительного элемента, относительно базовых понятий или параметров которого дается информация.
2. приемник информации – носитель разума или сознания, для базовых понятий которого дается информация.
ИНФОРМАЦИОННАЯ ПЕДЕРАСТИЯ – принуждение учащихся к запоминанию лишней «профессиональной» информации, вызывающее профессиональное выгорание человека, снижающее профессиональную конкурентоспособность, ограничивающее доступ к альтернативным источникам профессиональной информации. Понятие «профессиональная информация» определяют работодатели, учащиеся.
КОММУТАЦИОННАЯ МОДЕЛЬ РАЗУМА – достижения компьютерной программой разума через программную коммутацию файлов с алгоритмами и файлов с базы данных.
ЖИЗНЬ:
1. жизнь – способность материальных объектов с защитной обратной связью с окружающей средой это к материальному самокопрованию
2. жизнь – материально самокопирующаяся материальная структура
3. жизни техническая форма – форма жизни без самокопирования на атомном уровне
4. жизни нетехническая (нанотехнологическая) форма – форма жизни, самокопируемая на атомном уровне
5. жизни монокопируемая форма – форма жизни, самокопирующаяся без партнера
6. жизни бикопируемая форма – форма жизни, требующая 2 особи разного пола для самокопирования
7. жизни поликопируемая форма – форма жизни, самокопирующаяся промышленным способом
8. жизни органическая форма – форма жизни с материальной структурой на > 50% по массе состоящей с органических материалов
9. жизни неорганическая форма – форма жизни с материальной структурой на > 50% по массе состоящей с неорганических материалов
10. жизни форма органического энергопотребления – форма жизни, потребляющая энергию из органических энергоносителей
11. жизни форма неорганического энергопотребления – форма жизни, потребляющая энергию из неорганических энергоносителей
12. жизни форма электромагнитного энергопотребления – форма жизни, потребляющая энергию в электромагнитной форме
13. жизни форма электрического энергопотребления
14. форма жизни имеющая сознание
15. форма жизни не имеющая сознания
ОСНОВА ПОЯВЛЕНИЯ ЖИЗНИ – информационный протокол РНК-ДНК помогающий молекулам вещества самостоятельно собираться в живой объект. Для образования информационного протокола типа РНК-ДНК необходимы время порядка миллиардов лет, жидкость или газ как окислитель или горючее в определенных диапазонах давлений и температур, наличие необходимых веществ в окружающей среде.
Жидкость или газ реагируя с веществом окружающей среды дают энергию, необходимую для сборки живого объекта и его жизнедеятельности. Чем выше давление и температура среды, тем выше вероятность образования информационного протокола типа РНК-ДНК.
Всё живое на Земле возникло с одного единственного одноклеточного микроорганизма в результате эволюции в течение 3 миллиардов лет. Об этом говорят одинаковые 4 нуклеотида (всего 4. Возможны тысячи), 20 аминокислот (всего 20. Возможны тысячи), одинаковый информационный протокол РНК-ДНК всех форм жизни на Земле.
ЗАКОНЫ ПРИРОДЫ – законы действующие независимо от воли форм жизни.
ЗНАЧИМОСТЬ – способность влиять на прогноз действия или события.
ТЕХНОЛОГИЧНОСТЬ:
1. технологичность – минимум требований к точности изготовления товара
2. технологичность – максимальная простота, минимальная стоимость оборудования для производства, техобслуживания товара
3. технологичность – минимум требований к качеству материалов для изготовления товара
ВЫСОКОТЕХНОЛОГИЧНОЕ:
1. высокотехнологичное – более многофункциональная или более качественная технология
2. высокотехнологичное – технологичность наоборот (нетехнологичное)
МЕНТАЛИТЕТ – отпечаток наложенный на сознание человека окружающей средой.
АБОРИГЕН – коренной житель данной территории в пределах условного числа поколений или времени проживания его предков на данной территории.
СПОРТИВНАЯ ФЕДЕРАЦИЯ – иерархическая рабовладельческая структура, верхняя ступень иерархии которой присвоила себе статус Бога спорта, не признает у спортсменов и спортивных команд неоспоримых прав: у рабов божьих не может быть прав защиты от Бога спорта. Спортивная федерация имеет право запретить своим рабам всё, что сочтёт нужным, независимо от мнений спортсменов, спортивных команд. Спортивная организация превращается в бюрократическую рабовладельческую организацию после перехода контроля над ней к государству или корпорации – цель деньги или власть над рынком, а не принципы спорта. Государство опаснее для спорта: принципы спорта заменяет принципами госидеологии.
СПОРТ – соревнование смысл которого не уравнять шансы (лотерея – противоположность спорта) спортсменов и команд, а максимально точно найти самых сильных спортсменов, самые сильные команды, публично воздать им честь за превосходство. Не забыв упомянуть стоящих после них. Спорт не бизнес, не шоу. Можно делать деньги на соревнованиях, но не за счет отказа от принципов спорта.
В спорте есть принцип равноправия – любой человек или команда имеют право участвовать в отборочных соревнованиях и выйдя в финал участвовать в главных соревнованиях.
СПРИНТ – дистанции бега в которых половина профессиональных бегунов приземляются на носки ступней, а не на пятки.
СПРИНТЕРСКИЙ БЕГ – бег с низким положением центра масс тела, с сильно согнутыми в нижней точке центра масс тела ногами, с приземлением на носки ступней.
ОТВЕТСТВЕННОСТЬ:
1. ответственность – список соответствующих наказаний за невыполнение обязанностей
2. ответственность – обязанность выполнить список обязанностей
ОТВЕТСТВЕННЫЙ:
1. ответственный – программа в мозгу или в компьютере, несущая список обязанностей
2. ответственный – носитель ответственности
ЭКСТРЕМИЗМ – это переход человека или организации за определенный предел. Экстремизм – достижение спортивного предела, достижение профессионального предела, или выход за предел закона
Применение слова экстремизм в Уголовном кодексе незаконно для юридической науки – недопустимы многозначные понятия непригодные для свободного использования научной логики. Наука основана на однозначных понятиях. Юридически незаконно применение в законах многозначных понятий «экстремистский», «экстремист» – созданы с целью заблокировать логику адвоката.
НАУЧНАЯ ЛОГИКА – логика не противоречащая научным принципам познания мира, научным фактам.
МОРАЛЬ – правила игры, ограничивающие индивидуальный, коллективный, клановый, профессиональный, классовый... виды эгоизма.
СОВЕСТЬ – стремление человека уменьшить потери общества от своего или чужого эгоизма. Религия не совесть – законы религий противоречат созидательным правам человека, Уголовному кодексу и интересам гражданского общества, представляя собой классовые интересы силовиков. Пример религиозной совести – шариат у мусульман.
ДУХОВНОСТЬ – настроенность мозга на цель востребованную обществом, частью общества. Виды духовности:
1. профессиональная духовность – сильная настроенность носителя разума на достижение профессиональной цели
2. менталитетная духовность – соответствие менталитета человека преобладающим на данной территории программным установкам и настройкам власти
3. светская духовность – способность человека быть положительным притягательным центром компании; способность превращать компанию в источник положительных, для человека и общества, эмоций
4. религиозная духовность – соответствие менталитета человека преобладающим на данной территории догмам религии
ВЕРУЮЩИЕ – это люди верящие в истинность общественного мнения (поддаются гипнозу общественного мнения) или люди верящие в религию (религиозники). Верующим противостоят по типу мышления люди с научным типом мышления, доверяющие только научной логике, научным фактам, не допускающие существования сверхъестественных явлений, как противоречащих естественным наукам
РЕЛИГИЯ – организуемая классом силовиков передача гражданами своих прав жрецам культов, продвигающих классовые интересы силовиков. Религия отрицает научную логику, научные факты как основу познания и функционирования мира, рассматривает человека марионеткой непознаваемых человеком сверхъестественных сил.
Для человека с религий сознание человека – нечто сверхъестественное, что человек не может понять. Для человека с чисто научным мышлением сознание компьютерная программа мозга человека, которую можно создать для робота.
Религия заменяет научную логику верой без доказательств. Познание мира религия заменяет «сверхценными идеями», блокируя познание мира.
Религии создал класс силовиков с целью принудить граждан ограничить свои права и возможности, чтоб граждане не стали богаче, влиятельнее класса силовиков.
Религия – форма мошеничества жрецов (священников), обманывающих религиозников с целью достижения жрецами влияния в обществе, материальной выгоды. Например для продажи верующим жилплощади в Раю. Религия не совесть – законы религий часто противоречат созидательным правам человека, Уголовному кодексу, интересам гражданского общества.
В племенах Каменного века люди обогащались трудом или входили в банду вождя племени – подчиняли племя. Трудящиеся богатели, банды вождя нет. Банды объявив предметы святыми объектами поклонения создавали религии с целью повысить вероятность законно обвинить трудящихся в нарушении догм религии, отнять собственность, сделать рабами. Большинство религий – это дошедшие до нас с изменениями идеологии силовиков племен Каменного века.
Религии часть классовых интересов класса силовиков. Остальные классы общества не нуждаются в антиобщественных целях религий.
ЖРЕЦ – это в любой религии профессиональный исполнитель религиозных ритуалов, имеющий некоторую религиозную власть. В научном смысле слово «жрец» относится к любым религиям без деления на монотеистических, других. Примеры жрецов: христианский священник, мулла, раввин. В светских странах основной смысл слов – по принципам науки, в религиозных странах – по классовым интересам религиозных чиновников. Смысл слова «жрец» в светских и религиозных странах различается.
ТОТЕМ:
1. предмет являющийся эмоциональным символом религиозной или социальной группы людей
2. не имеющий сознания объект религиозного поклонения, мертвый предмет якобы дающий сверхестественные возможности. Пример: христианские икона, части тела святых
ИДОЛ:
1. идол – объект религиозного поклонения, обладающий сознанием
2. идол – объект поклонения обладающий сознанием
Научный смысл слова «идол» определяют ключевые понятия «религия», «объект поклонения», «сознание», но не определяют понятия «монотеизм», «политеизм». В светских странах основной смысл слов – по принципам науки, в религиозных странах – по религии. Смысл слова «идол» в светских и религиозных странах различается.
СЕМИТОИД – не являющийся семитом поклонник семитских религиозных идолов.
БОГ – идол силовиков несущий идею – класс силовиков Бог-рабовладелец, гражданское общество – рабы божьи. Идея быть классом рабовладельцев чтоб все деньги, собственность, лучшие самки достались силовикам, делает их марионетками учебников рабовладельцев Библия, Коран, обрекая гражданское общество на экономическое, технологическое, политическое вырождение.
Класс силовиков христианских стран по принципу «разделяй и властвуй» агентурой навязывает Бога гражданам с целью создания межнациональной, межрелигиозной вражды в гражданском обществе.
Именем Бога классом силовиков совершены множество преступлений против гражданского общества христианских стран в антиобщественных классовых интересах силовиков. Эти преступления сделали Бога символом безнаказанности силовиков за преступления против гражданского общества.
От Бога общество защищает идея Гражданского договора о государстве, соединяещего граждан в государство, где все классы общества равноправны, силовики временные (власть не передается по наследству) наемные работники без права на надобщественные интересы.
Граждане всерьез верящие – индивидум-инопланетянин Бог появился вопреки законам физики и биологии в пустом пространстве без развития в обществе как Маугли, создал все звезды, галактики – неадекватны, не имеют права занимать должности с госвластью, неспособны осознать – миром управляет научная логика и здравый смысл, а не вера.
Склонность к вере – главный принцип генетического отбора (евгеника Евангелия) в христианских странах, применяемый классом силовиков для выведения породы «идеальных граждан» (программируемый человек-робот), у которых отсутствует способность организовывать людей, чтоб исключить революции, госперевороты.
Обычно Бог нелюдь, инопланетянин – биологически не человек.
ХРИСТИАНСКИЙ БОГ – инопланетянин-шизофренник убивший своего сына, чтоб сделать людей обязанными инопланетянину, сделать инопланетными агентами помогающими инопланетянину сократить человечество для очистки планеты от людей. Полную очистку планеты Земля от людей проведёт во время Второго пришествия незаконорожденный сын инопланетянина-шизофренника Бога.
В Библии Бог убил миллионы людей по чисто идеологическим мотивам (борьба с еретиками), которые юридическая наука считает преступлениями. По безнравственному примеру христианского Бога 6000 положительных героев Библии совершили тяжкие преступления по чисто идеологическим мотивам (борьба с еретиками), которые юридическая наука считает преступлениями. По количеству призывов к убийствам и террору Библия превосходит все другие религиозные книги, создавая образ Бога – маньяка-шизофренника.
Это подтверждает историческая наука рекордным в Истории процентом людей, погибших из-за христианско-идеологического гостеррора против граждан (борьба с еретиками) и в христианско-идеологических войнах.
Атмосфера многотысячелетнего идеологического террора против еретиков породила такие визитные карточки христиан, как геноцид против иноверцев (язычников, иудеев...), концлагеря и газовые камеры против граждан по чисто идеологическим мотивам (борьба с еретиками), которые юридическая наука считает преступлениями.
ЕВГЕНИКА ЕВАНГЕЛИЯ – государственная система генетического отбора граждан ставящая целью Спасение души человека.
Спасение души человека – уничтожение нехристианских генотипов человека генетическим отбором для замены людей думающих обществом рабов-догматиков по принципу – в генетической программе человека не должно быть человеческих целей – только животные цели – чистый лист бумаги в который силовики запишут Евангелие, превратят в программируемое животное которое будет пасти Евангелие.
Евгеника Евангелия выводит породу «идеальных граждан» (программируемый человек-робот), у которых отсутствует организационные способности людей: исключаются революции, госперевороты. Они не опасны для антиобщественных классовых интересов класса силовиков. Евгеника Евангелия уничтожает генотипы граждан не соответствующих Евангелию, блокируя им размножение.
Спецслужбы христианских стран сокращают человечество революциями; расчленяют страны с уничтожением людей войнами, эпидемиями. Для организации эпидемий христиане в своих 330 зарубежных военно-бактериологических лабораторий ищут технологии стерилизации 7 миллиардов человек вирусами, вакцинами, болезнями. Христиане в 21 веке через их организацию ООН убили полмиллиарда африканских детей стерилизовав вакциной от столбняка 140 млн африканских женщин (у них 6-7 детей на семью).
В христианских странах агентура контрразведки массово навязывает однополые браки, чтоб не размножались. Размножаться может только порода «христианин». Христианские страны международными санкциями, экотиранией сокращают экономику, население нехристианских стран по плану «Золотой миллиард».
В России контрразведка (система страхования власти от гражданских войн и вмешательства иностранцев) организовала государственный атеизм и Коммунистическую революцию для убийства евгеникой Евангелия десятков миллионов граждан нехристианского генотипа. С аналогичной целью контрразведки Франции, Венгрии, Германии организовали свои Коммунистические революции, сократившие их население.
Евгеника Евангелия началась с эксплуатации еврооккупантами иудейского мифа – придет иудейский царь, защитит иудеев от оккупантов. Иисус Христос пропагандировал коммунистическую идеологию созданную еврооккупантами для экономического геноцида народов Азии, Африки. Судя по анализу текста Евангелие создали европейские силовики в Азии с целью экономического геноцида (жизненное пространство для европейцев) азиатов, африканцев. Евангелие – литературное творчество европейских силовиков, несущее их эгоистические классовые интересы.
Студент парижского университета, член компартии Франции, агент Франции Пол Пот коммунистической идеологией очищал от людей Камбоджа. Вымышленный еврооккупантами Христос коммунистической идеологией очистил от евреев их Родину. 30 сребреников агента европейцы внесли в Евангелие, платят предателям своих наций, стран. Никто так не сокращает человечество как Иисус Христос.
Христос вел пропаганду против семьи, капитала, предпринимательства. Его коммунистическую идеологию контрразведка Рима продвигала с целью уравнять власть контрразведки с властью римского императора.
Идея быть классом рабовладельцев чтоб все деньги, собственность, лучшие самки достались силовикам, делает их марионетками учебника рабовладельцев Евангелие.
Общество в котором у граждан нет человеческих целей – вариант обратной эволюции человека к уровню развития мозга обезьян. Что в сочетании с ядерным оружием вариант ядерного самоубийства человечества.
ЕВАНГЕЛИЕ – религиозный коммунистический культ самоубийства человечества, ориентированный на борьбу с богатством человека и семьи; на уничтожение государством семьи, права частной собственности и предпринимательства.
Главный идол Евангелия – коммунист-инопланетянин Иисус Христос – серийный убийца который в своем Втором пришествии физически убьет всех людей, сделает с них цифровые копии для виртуальных планет Ад, Рай. Для инопланетных агентов – христиан – второе пришествие инопланетянина Иисуса Христа праздник.
Евангелие создали еврооккупанты в Азии как инструмент экономического геноцида азиатов и африканцев с целью создать жизненное пространство европейским колонизаторам. Нация Иисуса Христа – евреи – составляли ~10% населения Римской империи. После создания Евангелия численность евреев в этой территории теперь меньше 0,1% – Евангелие госинструмент сокращения численности азиатов.
Евангелие создано на основе иудейского мифа о скором приходе еврейского царя-освободителя евреев от оккупантов. Евангелие – литературное творчество европейских силовиков, несущее их классовые интересы. Наука не знает ни одного факта существования в Истории Христа.
Христиане – самая кровавая в Истории религия, тысячи лет уничтожающая обычными и мировыми войнами, цветными революциями, экотиранией, другими методами рекордный процент населения планеты.
ХРИСТИАНЕ – религиозный коммунистический культ самоубийства человечества, ориентированный на борьбу с богатством человека и семьи; на уничтожение государством семьи, права частной собственности и предпринимательства.
Идол христиан – коммунист-инопланетянин Иисус Христос – серийный убийца который в своем 2-ом пришествии придет физически убить всех людей, сделает с них цифровые копии для виртуальных планет Ад, Рай. Для инопланетных агентов – христиан – второе пришествие инопланетянина Иисуса Христа праздник.
Главную книгу христиан – Евангелие – создали еврооккупанты в Азии, как инструмент экономического геноцида азиатов и африканцев с целью создать жизненное пространство европейским колонизаторам. Нация Иисуса Христа – евреи – составляли ~10% населения Римской империи. После создания Евангелия численность евреев на этой территории теперь меньше 0,1% – Евангелие госинструмент сокращения численности азиатов.
Евангелие создано на основе иудейского мифа о скором приходе еврейского царя-освободителя евреев от оккупантов. Евангелие – литературное творчество европейских силовиков, несущее их эгоистические классовые интересы. Наука не знает ни одного факта существования в Истории Христа.
Христиане – самая кровавая в Истории религия, 2000 лет непрерывно уничтожающая обычными и мировыми войнами, цветными революциями, экотиранией и другими методами рекордный процент населения в занимаемой территории. Кровь тысячелетиями проливается по чисто идеологическим мотивам, не объяснимым ни логикой, ни здравым смыслом, ни стремлением к богатству (Евангелие борется против богатства).
ИСПОВЕДЬ – существующий только в христианской религии ритуал стукачества: христианин стучит на себя чиновнику религии. Ритуал исповеди одно из доказательств – террористические (призывы к убийствам) религии созданы классом силовиков.
СПАСЕНИЕ ДУШИ У ХРИСТИАН – уничтожение нехристианских генотипов человека генетическим отбором, заменяющим людей думающих обществом рабов-догматиков по принципу – в генетической программе человека запрещены человеческие цели – только животные цели – чистый лист бумаги где силовики запишут Евангелие, убьют в человеке все чисто человеческое, превратят в программируемое животное которое будет пасти Евангелие.
Спасение души у христиан – это создание по госидеологии Евангелие полностью предсказуемой породы «идеальный гражданин» (программируемый человек-робот), у которого нет способности организовывать людей, чтоб исключить революции, госперевороты. В будущем растет вероятность скрытого от общества клонирования силовиками в неограниченных количествах «идеальных граждан».
Общество в котором у граждан нет человеческих целей – вариант обратной эволюции человека к уровню развития мозга обезьян. Что с ядерным оружием вариант ядерного самоубийства человечества.
Евангелие учит рабовладельцев загонять в рабство мозг гражданина, превращая в неодушевленный инструмент, у которого нет права даже на эмоции (заповедь-2 Библии: нельзя никого и ничего любить). Спасение души у христиан – превращение граждан в неодушевленный инструмент рабовладельца. В роли рабовладельца в христианских странах класс силовиков. Евангелие – литературное творчество европейских силовиков, несущее их классовые интересы.
СОБОРНОСТЬ – коллективизации принятия госрешений по антиэлитарным (христианский принцип социального равенства – Диктатура дураков) принципам интеллектуального равенства голосующих правящих кланов силовиков.
ЛИЦО ХРИСТИАНСКОГО МЕНТАЛИТЕТА – лицо коммунистического менталитета, несущее в себе идеологию учебника коммунистов Евангелия.
АНТИХРИСТИАНСКИЕ ПАРТИИ – партии защищающие гражданское общество от законов, секретных инструкций, госидеологий основанных на преступных антигуманистических принципах Евангелия (учебник коммунистов).
АНТИХРИСТИАНСКИЕ ОРГАНИЗАЦИИ – организации с системой безопасности не допускающей проникновения в организацию и ее мероприятия преступных антигуманистических принципов Евангелия (учебник коммунистов).
АНТИХРИСТИАНСКИЙ КОДЕКС – список запрещенных в организации преступных человеконенавистнических принципов идеологии Христа:
1. принцип изначальной с рождения виновности человека
2. принцип социального равенства людей вместо юридического и профессионального равноправия
3. принцип максимума оплачиваемого труда (христианская экономическая наука)
4. заповедь-2 Библии: нельзя никого и ничего любить
5. запрет профессиональной чести для Создателей
6. принцип не заботься о завтрашнем дне
7. принцип коллективизации труда
8. принцип кто возвышает себя, тот унижен будет
9. принцип кто хочет быть первым между вами, да будет вам рабом
10. могут быть добавлены другие преступные принципы Библии по мере анализа её влияния на общество
ТОВАР:
1. объект продажи
2. услуга за деньги
3. все, за что кто-то получает деньги
ДЕНЬГИ – материальный или цифровой документ свидетельствующий – общество должно Х часов труда среднестатистического рабочего этому человеку (организации) за принесенную им пользу обществу. Деньги – количественная мера обязанности общества человеку (организации). Количество человеческого труда оценивают деньгами.
Деньги главное изобретение человечества, давшее людям возможность работать в полную силу. В обществе без денег людей будет интересовать только как больше съесть бесплатно, меньше работать, получать всё даром. Люди станут работать только каменными топорами. Лить метал для производства топоров невозможно без денег или их торговых заменителей, позволяющих накапливать капитал.
Деньги покончили с рабовладельческим общественным строем. Попытку убрать деньги для возврата в рабовладельческий общественный строй называют Коммунизмом.
ТРУД – затраты жизненной энергии человека на достижение цели. Труд делят на свободный, принудительный (рабство). Свободный труд – труд не по принуждению, как у рабовладельца, феодала, администрации тюрьмы (тюремный бизнес США). Труд измеряют в деньгах, человеко-часах.
БЮРОКРАТИЯ – вертикально-иерархическая структура стремящаяся к узкой специализации для сохранения максимального числа своих работников. Главная задача бюрократии не допустить в свою организацию универсальных специалистов, карать попытки своих работников двигаться в сторону универсальности. Бюрократия поощряет движение своих работников в сторону узкой специализации. Бюрократия – это идеологический вирус увеличивающий число своих копий и подобно раковой опухоли разрушающий государство, предприятие изнутри.
БЮРОКРАТИЗАЦИЯ – переход на более узкую специализацию работников организации с усложнением профессиональной иерархии. Бюрократизация:
1. уменьшает индивидуальную ответственность людей за конечный результат работы организации. Трудно найти виновных
2. вытесняет универсальных людей способных уловить взаимосвязи между темами в организации, узкими специалистами неспособными убрать противоречия между конечной целью организации и неработающими на неё средствами её достижения.
Бюрократизация коллективизирует профконкуренцию, собственность, человеческую мысль, ответственность. Вероятность бюрократизации быстро растет при увеличении числа людей в организации > 400. Бюрократизация заменяет конечную цель организации на процесс её движения к цели как религиозный ритуал.
Идеологический первоисточник бюрократизации – стремление больших иерархических структур блокировать усиление человеческого фактора по принципу равенства людей. Процесс бюрократизации двигается к следующим принципам:
1. запрещено увеличивать влияние человеческого фактора: незаменимых людей нет
2. все процессы организации должны быть стабильны. Нестабильность карается
3. профессиональная конкуренция запрещена или сильно ограничена
4. бойкот универсальных специалистов
5. работа людей ориентирована на максимум личных связей
6. все работает как структура с максимумом (сбор информации) взаимных связей между элементами
7. структура требует одновременной работы большого числа узкоспециализированных элементов
8. узкая специализация людей. Их ответственность коллективизируется
9. запрещены взаимно независимая работа элементов структуры
10. запрещены универсальные элементы структуры
Блокировка человеческого фактора идет только сверху вниз от испуга высоких чиновников за свое рабочее место. Результат: страны, корпорации где боролись с усилением роли человеческого фактора, терпят крах в условиях жесткой конкуренции.
Пример: силовики США, России испуганные Кубинским ракетным конфликтом, решили – влияние инженеров на ход мировой истории чрезмерно, стали агентурой, отбором инженеров бороться с усилением человеческого фактора в инженерии.
Результат: несмотря на разницу финансирования много стран обогнали США, Россию по параметру «качество – цена» в мировом рынке промышленной продукции, прежде всего военной. Стала чрезмерной себестоимость производства, эксплуатации военной техники разработанной в США. Россия потерпела экономический крах и потерю более половины населения в 1991г от борьбы класса силовиков против усиления человеческого фактора.
ПОЛИТЭКОНОМИЯ – идеология монопольного контроля правящих кланов силовиков над финансовыми потоками в государстве, для блокировании финансовых возможностей неправящих кланов гражданского общества под предлогом защиты государства от иностранных финансовых сил.
КОНТРРАЗВЕДКА – система страхования власти от гражданских войн и вмешательства иностранцев, страховое агентство страхующее власть правящей элиты племени, государства.
Контрразведка сегодня в христианских странах работает по идеологии страхового агентства – идеология борьбы против усиления человеческого фактора:
1. запрещено увеличивать влияние человеческого фактора: незаменимых людей нет
2. все процессы организации должны быть стабильны. Нестабильность карается
3. профессиональная конкуренция запрещена или сильно ограничена
4. бойкот универсальных специалистов
5. работа людей ориентирована на максимум личных связей
6. все работает как структура с максимумом (сбор информации) взаимных связей между элементами
7. структура требует одновременной работы большого числа узкоспециализированных элементов
8. узкая специализация людей. Их ответственность коллективизируется
9. запрещены взаимно независимая работа элементов структуры
10. запрещены универсальные элементы структуры
Агенты контрразведки проникая в предприятия, идеологией доводят до банкротства в условиях конкуренции на рынке. Контрразведка законами уничтожает профессиональную конкуренцию специалистов, конкуренцию предприятий (территориальный монополизм) на рынке. Это ведёт государство к экономическому краху.
Попытки контрразведки сегодня решить экономические, военные проблемы государства напоминают попытки решить проблему оптимизации Уголовного Кодекса юристами. Юристы наоборот максимально запутают Уголовный Кодекс чтоб политически усилить класс юристов, увеличить его финансирование гражданским обществом.
Только класс инженеров может оптимизировать Уголовный Кодекс, принципы государства, сведя к малому числу универсальных законов, принципов. Тогда 99% юристов, 80% силовиков станут не нужны. Это причина скрытой классовой войны контрразведки против класса инженеров и изобретателей в христианских странах.
В эпоху рабовладельческого общественного строя формой давления на идеологию контрразведки была религия. Религия как идеологический вирус созданный классом богатых рабовладельцев, подчинял идеологию контрразведки интересам класса рабовладельцев.
Наиболее часто встречающиеся черты религий, как идеологических вирусов: создание механизмов отвлечения народа от стремления повысить свой уровень жизни (пропаганда бедности для народа в христианских странах), создание механизмов кастрации интеллекта народа через максимальную загрузку его трудом, внушение народу идеи об отказе от потребностей.
Феодальный общественный строй: переход на обобщенные юридические принципы типа – вассал моего вассала не мой вассал. Правила игры обобщались от обеднения наследников (работали в контрразведке) феодалов от быстрого размножения феодалов. Рост конкуренции между быстро размножающимися правящими кланами силовиков, привел к обобщению принципов страхования власти правящих кланов.
Контрразведку называют госбезопасностью. Госбезопасность – безопасность власти правящей элиты силовиков. Кроме безопасности государства есть безопасность страны. Безопасность страны – это безопасность государства + безопасность гражданского общества от грабежа и идеологического бандитизма государства.
Если сравнить государство с компьютером, контрразведка – антивирусная программа. Антивирус может создать проблем больше, чем вирус.
КОНТРРАЗВЕДКА ХРИСТИАНСКИХ СТРАН – организация мстителей – идеологических силовиков мстящих гражданам за невыполнение коммунистической идеологии еврейского царя Иисуса Христа. Это иностранные агенты служащие иностранцу – еврейскому царю Христу, а не гражданскому обществу. Они глубинное государство христианских стран и страховое агентство страхующее власть правящих кланов силовиков государства.
РАЗНИЦА МЕЖДУ НАУЧНЫМ И РЕЛИГИОЗНЫМ МЫШЛЕНИЕМ
Тест отличающий научное мышление от религиозного – ответ на вопрос: разум и сознание это софт мозга человека или нет? Человек с стопроцентно научным мышлением ответит да. Религиозное мышление – нет.
Научное мышление стремится к простоте и максимальному реализму в описании мира с целью свободного получения пользы от информации всеми членами общества. Научное мышление не признаёт ничего сверхестественного, в принципе необъяснимого. Всё подчиняется естественным наукам. Если что не подчиняется – это открыто признается, создаются модели логически объясняющая явление.
Религиозное мышление системой догм (постулатов, аксиом) подчиняет людей вертикальной иерархии, излагает информацию о явлениях природы так, чтоб низшие ступени иерархии не получили пользу с информации. Религиозное мышление строит мир так, чтоб количество прав и возможностей человека было прямо пропорционально количеству его связей с влиятельными людьми. Это означает создание военизированного авторитарного общества. Люди с научным мышлением создают либерально-демократическое общество.
Научное мышление исследует явление природы. Религиозное мышления заменяет исследование вымыслом, чтоб усложнить понимание мира (создать управляемый хаос), сделать мир непознаваемым людям низших ступеней иерархии – рабам запрещено познавать мир.
РАЗНИЦА МЕЖДУ ЧАСТНЫМИ И ГОСУДАРСТВЕННЫМИ ОРГАНИЗАЦИЯМИ – определяется людьми распоряжающихся собственностью организации. Если собственностью распоряжается госслужащие в рабочее время – это госорганизация независимо от её юридического статуса. Если нет это частная организация.
РАЗНИЦА МЕЖДУ «ОБЩЕСТВЕННЫЙ» И «СОЦИАЛЬНЫЙ» - силовики христианских стран заменяют слова «общество», «общественный» на «социум» и «социальный» чтоб отделить силовиков от остальных граждан, которых называют «социум».
СОЦИАЛЬНЫЙ РЕЙТИНГ – коэффициент пользы государству от человека. Государство – силовая организация в лице класса силовиков. Социальный рейтинг – попытка принудить граждан служить не долговременным интересам гражданского общества, а классовым интересам класса силовиков. Социальному рейтингу противостоит внеклассовый Общественный рейтинг, основанный на пользе принесенной гражданскому обществу человеком.
В отличие от социального рейтинга рынок выполняет интересы гражданского общества, а не одного класса. Рынок и социальный рейтинг государства несовместимы: ~50% классовых интересов силовиков противоположны интересам гражданского общества.
Класс силовиков – наемный работник нанятый гражданским обществом выполнять Гражданский договор о государстве. Гражданский договор – это долговременные интересы гражданского общества – список целей меняющийся с временем. У интересов гражданского общества приоритет больше, чем у интересов класса силовиков – класс силовиков малая часть гражданского общества.
СОЦИУМ – государственный термин христианских стран, означающий народ. Силовики в понятие социум не входят.
СОЦИАЛЬНОЕ РАВЕНСТВО – борьба с богатством, которую якобы от народа (богачи – разбогатевший народ) ведут идеологические силовики христианских стран по идеологии борца с богатством Иисуса Христа (госидеология Евангелие). Самые известные формы борьбы с богатством: прогрессивный налог на предпринимателей, крупные штрафы, антимонопольные законы, налог на наследство, агентурная работа. Социальное равенство распространяется и на интеллектуальную собственность.
КУЛЬТ ПОТРЕБЛЕНИЯ – созданное силовиками христианских стран, продвигаемое их агентурой обвинение против гражданского общества, с целью поднять налоги на граждан и частных предпринимателей. Чем больше проблем с идеологией Христа, тем чаще они агентурой обвиняют в «культе потребления» гражданское общество, напоминая – бомж-коммунист Иисус Христос боролся против капитала, капиталистов (Христос бил плетью предпринимателей, портил их товар), частной собственности.
ОБЩЕСТВО – это не гражданское общество, если нет уточнения контекста. Слово общество без контекста – это человечество. Обобществление собственности – это не национализация собственности, а переход собственности к всему человечеству. Национализация собственности – это переход собственности к классу силовиков (государство – аппарат в лице класса силовиков). Силовики как малая часть гражданского общества не есть гражданское общество.
ОБЩЕСТВЕННОЕ ДОСТОЯНИЕ – общественная собственность принадлежащая всему человечеству без ограничений, каждому человеку. Общественное достояние не является государственной, классовой или частной собственностью.
Госсобственность – классовая собственность класса силовиков по факту монополии класса силовиков на право распоряжения госсобственностью. Примерно в половине случаев классовые интересы силовиков противоположны долговременным интересам гражданского общества.
Люди объявляют свои работы общественное достоянием, защищая от финансовой цензуры государств. Государства стремясь получить с граждан налоги, объявляют работы людей наследством – за пользование платить. Пример: книги Джорджа Оруэла скачивают мало – они платные. Вряд ли Джордж Оруэл ожидал такой цензуры.
ГОСУДАРСТВЕННАЯ СОБСТВЕННОСТЬ – классовая собственность класса силовиков по факту монополии класса силовиков на распоряжение госсобственностью.
ГОСПРЕДПРИЯТИЕ – предприятие принадлежащее классу силовиков по монопольному праву распоряжения госсобственностью. Государство – силовая организация в лице класса силовиков.
Госпредприятия юридически незаконны – это злоупотребление деньгами налогоплательщиков для экономической диктатуры класса силовиков в богатых секторах рынка. Предпринимательством должны заниматься частные предприниматели и изобретатели, а не силовики в рабочее время – раздел госвласти и экономической власти. Законные госпредприятия – госбанк, торговля оружием.
Госпредприятия – результат классовой борьбы класса силовиков против остальных классов гражданского общества с целью экономической диктатуры.
Идеологический первоисточник госпредприятий – созданный еврооккупантами в Азии учебник рабовладельцев Евангелие, основанный на натравливании рабовладельцами общества против личного и семейного капитала рабов (социальное равенство запрещает рабам частную собственность, предпринимательство, эксплуатацию человека) для экономической, идеологической диктатуры рабовладельцев.
Идея быть классом рабовладельцев чтоб все деньги, собственность, лучшие самки достались силовикам, делает их марионетками учебника рабовладельцев Евангелия.
Госпредприятия основаны на коллективистских принципах Евангелия – предприятие состоит из рабовладельцев, рабов, надзирателей над рабами. Надзиратель выполняет функции принуждения, управления, учета, контроля, распределения. Надзиратель в 2-5 раз дороже раба. Рабовладелец экономя деньги прикрепляет к надзирателю максимум рабов, коллективизируя труд, укрупняя предприятия.
НАРОДНОЕ ПРЕДПРИЯТИЕ – частное предприятие которое:
1. не принадлежит лицам с госвластью
2. не принадлежит лицам из правящих кланов государства
НАРОД – частные лица без госвласти, не из правящих кланов государства.
СИЛОВИК – носитель профессиональной власти, употребляемой против нарушителей законов, инструкций, правил.
КЛАСС ОБЩЕСТВА – это по умолчанию профессиональная группа общества. Термин применим и в глобальном смысле.
ОРГАНИЗОВАННЫЙ КЛАСС ОБЩЕСТВА – класс способный защищать свои классовые интересы, класс имеющий госвласть или частную собственность на средства производства + рыночный спрос на товар, услугу.
Пример организованных классов:
1. силовики. Есть госвласть.
2. предприниматели. Имеют средства производства и рыночный спрос на товар, услугу.
Пример неорганизованных классов:
1. класс ученых. Нет госвласти, рыночного спроса.
2. рабочий класс. Нет частной собственности на средства производства.
Класс инженеров может быть организованным классом при наличии частной собственности на средства производства.
ФИЛОСОФИЯ:
1. философия – достаточно универсальный список принципов достижения цели
2. философия – обобщенная модель мира обобщенными словами
3. философия – наука обобщения общественных логических эталонов
ИДЕОЛОГИЯ – система создания принципов достижения цели, в общем виде исторически сложившаяся в религиозных, силовых и террористических организациях. Идеология не признает изменения своих принципов общим голосованием в отличие от науки.
Идеология служит не истине как наука, а целям узкой группы общества. Наука служит всему человечеству. Идеология – это взгляд организации или класса общества, а не общества. У общества нет четко выраженных взглядов. Идеология стремится к засекречиванию работы своей организации, наука стремится к открытости своих организаций, к свободному доступу к научной информации.
В отличие от философии идеология основана на механизмах принудительного выполнения. Идеология государства порождает идеологических силовиков, применяющих агентурный или уголовно-судебный гостеррор против гражданского общества за невыполнение идеологии, за сомнение в её общественной полезности.
Идеология государства – список принципов класса силовиков, приоритет которых меняет ситуация. В отличие от доктрины идеология государства имеет силу закона для всех граждан государства.
ИДЕОЛОГИЧЕСКИЙ – обоснованный для принудительного вмешательства.
ГОСИДЕОЛОГИЯ – имеющий силу закона для всех граждан список принципов приоритет которых меняет ситуация. Госидеология неподсудна в отличие от законов, которые может отменить Верховный Суд. Неподсудность госидеологии – самая опасная угроза гражданскому обществу. Госидеологии марксизм в России, национал-социализм в Германии из-за неподсудности госидеологии убили более 100 млн чел.
Для защиты гражданского общества в Конституции должен быть запрет на госидеологию. Её заменяют законы. В отличие от законов у госидеологии нулевой порог терпимости: даже за мелкие нарушения принципов госидеологии в личное дело человека силовики добавляют штрафные баллы, снижая социальный рейтинг – это с годами постепенная потеря прав человеком. Госидеологии незаконны – обвинения против граждан должны быть сформулированы как официальные законы государства, чтоб гражданин мог реализовать конституционное право на адвоката.
Защиты государства и гражданского общества от госидеологий нет – идеологические силовики единственная госслужба, над которой отсутствует госконтроль. Кланы, фракции идеологических силовиков не заинтересованы в алгоритмах борьбы с противоречиями их организации, интуитивно понимая – алгоритмы ликвидируют профессию идеологического силовика. Силовики скорее выберут гражданскую войну, чем научные алгоритмы.
У силовиков классовый интерес – создавать преступников, террористов, врагов государства для роста своего финансирования за счет новых налогов, штрафов, сборов, способов принудительного страхования граждан, собственности.
Госидеология – система обобщенных взглядов силовиков ставящая цель создать образ гражданина – врага государства (социальный рейтинг). И под предлогом борьбы с гражданами-врагами за деньги налогоплательщиков создать паразитические рабочие места силовиков и госслужащих для родственников, секс-партнеров силовиков.
Идеологические силовики размножаясь быстрее гражданского общества, создают новые рабочие места идеологических силовиков своим детям, внукам. Рост процента идеологических силовиков в гражданском обществе приводит к конфликтам интересов между кланами, фракциями идеологических силовиков; приводит к жесткой бюрократизации государства и разрушению экономики государства с последующими госпереворотами, гражданскими войнами.
В отличие от философии идеология основана на механизмах принудительного выполнения. Госидеология – карательная система государства с идеологическими силовиками, карающими (вредительство, поджоги, убийства...) агентурой граждан и организации за невыполнение госидеологии (Евангелие в христианских странах) или за сомнение в её общественной полезности.
Признаки госидеологии:
1. неподсудность. Госидеологию невозможно опротестовать в Суде – у госидеологии юридический статус выше Судебных органов. Это катастрофа всей жизни для жертв госидеологии
2. госидеология карательный инструмент против гражданского общества, подменяющий официальные законы секретными инструкциями нарушающими права человека
Доктрины государства, планы, внутренние документы крупных госструктур – не госидеологии. У них нет силы закона для гражданского общества.
Нельзя путать нормальные требования государств с требованиями госидеологии, которые не зависят от современной ситуации, служат интересам только одного класса общества. Госидеология – форма государственного бандитизма.
Госидеология как карательная система не направлена против иностранцев. Госидеологию создает класс силовиков против наиболее интеллектуальной (обычно интеллигенция) части граждан с целью не дать им конкурировать за выгодные рабочие места с детьми, внуками силовиков.
ПОЛИТИЗАЦИЯ – рост вероятности карательных действий государства к гражданам, семьям, предприятиям по внутриполитическим, внешнеполитическим или идеологическим (госидеология) причинам.
ИДЕОЛОГИЧЕСКОЕ ГОСУДАРСТВО – государство функционирующее по принципам религиозного государства, государство с госидеологией. Это гостеррор против граждан за критику идеологических идолов, за критику госидеологии, за помехи идеологической пропаганде государства в учебных заведениях, Армии...
ИДЕАЛЬНОЕ ГОСУДАРСТВО – организация силовиков нанятая гражданским обществом по Гражданскому договору, реализующего долговременные интересы гражданского общества.
СВЕТСКОЕ ГОСУДАРСТВО – государство без религиозной госвласти и госзащитой граждан от религиозного террора.
ГОСУДАРСТВО – силовая организация в лице класса силовиков, обеспечивающая закон и порядок в стране, защищающая гражданское общество, свою территорию, юридическую систему и другие ценности. Госсобственностью распоряжается только класс силовиков. Частные военные компании не имеют госвласть, не являются госструктурой, требуют периодического продления их лицензии, подчиняются законам государства.
Государство финансируют налогоплательщики. Государство имеет принадлежащую ему территорию с охраняемыми границами, обладает правом суверенности и монополией на применение силы на своей территории.
Государство основано на насилии и принуждении против нарушителей законов. Разница между насилием и принуждением определяет масштаб ущерба от нарушителя закона.
У государства есть право защищать своих граждан внутри или вне своей территории. Госидеология не признак государства. Государство отличается от страны тем, что в понятие «государство» входит не всё гражданское общество, не вся собственность, а только класс силовиков и госсобственность.
СТРАНА – организация в пределах госграниц с гражданским обществом, силовым аппаратом обеспечивающим закон и порядок. Страна отличается от государства тем, что в понятие «государство» входит не всё гражданское общество, не вся собственность, а только класс силовиков и госсобственность.
ГОСОРГАНИЗАЦИЯ – не частная, не иностранная организация работающая за деньги налогоплательщиков. Муниципальные организации – разновидность госорганизации: они в прямом подчинении госвласти, работают за деньги налогоплательщиков государства.
АНТИМОНОПОЛЬНАЯ СЛУЖБА – часть христианской налоговой системы, скрыто от гражданского общества принуждающая частные предприятия-монополистов рынка поднять цены для максимума сбора налогов. Не поднимут – штрафы, расчленение предприятия.
Равноправная конкуренция и монополия – юридически разные понятия. Конкуренцию защищают господдержкой немонополистов, а не расчленением предприятия-монополиста или штрафами. У предпринимателей есть право на монополию на рынке при равноправности конкуренции обеспечиваемой госвластью (её обязанность, а не предпринимателя).
Антимонопольная служба должна быть заменена Службой равноправной конкуренции на рынке: государство защищает равноправную конкуренцию на рынке.
ВЛАСТЬ – профессиональные права, делегируемые обществом носителю власти, для общественно полезного функционирования государства.
ДЕМОКРАТИЧЕСКОЕ ГОСУДАРСТВО – нанятое гражданским обществом по Гражданскому договору о государстве агентство из лояльных граждан выполняющих Гражданский договор о государстве.
Демократическое государство – государство соответствующее функциям демократии.
ДЕМОКРАТИЯ – система деполитизации государства по принципу минимизации вмешательства государства и корпораций в жизнь гражданина, в его предприятие, в жизнь его семьи. Демократия как система деполитизации государства выполняет следующие функции:
1. функция защиты гражданского общества от стремления класса силовиков скрытыми мерами увеличить преступность в обществе для «защиты общества» за деньги налогоплательщиков. Для «защиты общества» класс силовиков часто поднимает преступность лишними законами, законами против атеистов, несоразмерным наказанием по закону, нечеловеческими условиями содержания граждан в тюрьмах для превращения их в зверей
2. функция защиты граждан, их семей от от грабежа, идеологического бандитизма государства через Конституцию, в тексте которой только слова в наиболее распространенном однозначном смысле, без многозначных слов. Ввод Бога в Конституцию делает граждан рабами божьими – у рабов нет прав, на рабов Конституция не работает
3. функция гласности. Гражданское общество имеет право знать обо всех законных возможностях или угрозах для гражданского общества. Главная угроза гражданскому обществу это государство
4. функция защиты гражданского общества от посягательства государства против права человека на СТОПРОЦЕНТНОЕ профессиональное самообразование. Вопрос профессионального соответствия человека на рабочее место решает работодатель по принципу Суда. Работодатель обвиняет претендента на рабочее место в профессиональном несоответствии. Претендент в собеседовании доказывает обратное. Государство не имеет права вмешиваться в этот процесс без обращения к государству одной из сторон
5. функция защиты гражданского общества от стремления государства разными предлогами заменить принцип «презумпции невиновности» принципом «презумпции виновности»
6. функция разделения законодательной, судебной, исполнительной власти
7. функция разделения государственной и экономической власти – госпредприятия незаконны за исключением госбанка, торговли оружием. Госпредприятия – попытка класса силовиков захватить одновременно госвласть и экономическую власть за деньги налогоплательщиков. Силовики могут заниматься предпринимательством только в нерабочее время в частном порядке с управляющим, без злоупотребления госвластью
8. функция экономического равноправия всех классов общества
9. функция защиты гражданского общества от стремления государства законами незаметно уравнять с госсобственностью общественную и частную собственность, что есть нападение государства на право частной собственности – главный механизм защиты гражданского общества от грабежа государства. Право частной собственности – право собственности за владение, пользование и распоряжение которой собственник не обязан платить налоги, принудительные страховые взносы. Надо платить – это не частная собственность, а скрытая разновидность государственной собственности. Налог (пошлина) на защиту права интеллектуальной собственности изобретателей отнял у них профессию, частную собственность
10. функция защиты гражданского общества от тайного объединения государства и корпораций против интересов гражданского общества через ограничение уровня и качества жизни граждан экологическими, медицинскими, религиозными и другими законами с целью выжимания с гражданского общества максимума сверхприбылей корпораций, сверхналогов с сверхприбылей
11. функция защиты гражданского общества от действий корпораций против конкуренции на рынке государства. Государство должно защищать равноправную конкуренцию на рынке. Антимонопольная функция государства – преступление против предпринимательства, гражданского общества. Равноправная конкуренция и монополия – юридически разные понятия. Конкуренцию защищают господдержкой немонополистов, а не нападением государства на монополистов. У предпринимателей есть право на монополию на рынке при условии равноправной конкуренции. Антимонопольная служба должна быть заменена Службой равноправной рыночной конкуренции
12. функция защиты граждан, их семей от госидеологии. Запрет госидеологии. У граждан нет обязанности выполнять госидеологию
13. функция защиты гражданского общества от несоразмерного наказания государством за преступления граждан, предприятий
14. функция защиты гражданского общества от стремления государства натравливать одни классы общества против других (на предпринимателей, на интеллигенцию...)
Выборность власти не обязательно признак демократии – уровень демократии измеряют по уровню выполнения функций демократии, а не по наличию представителей народа в органах власти. Привязка демократии к выборности власти это обычно манипуляция общественным сознанием в классовых интересах класса силовиков.
КОНСТИТУЦИЯ – государственный юридический документ защищающий гражданское общество от грабежа и идеологического бандитизма государства, как силовой организации в лице класса силовиков. Конституция – сокращенная версия Гражданского договора о государстве.
В Конституции светского государства не могут употребляться религиозные идолы (Бог или пророк религии). Иначе это Конституция несветского государства с религиозной госидеологией.
В тексте Конституции допустимы только слова в наиболее распространенном смысле, без многозначных слов непригодных для свободного использования юридической логики. Иначе это документ политического манипулирования гражданским обществом в пользу скрытых антиобщественных интересов класса силовиков.
ЛИБЕРАЛИЗМ – это защита прав гражданина, семьи, гражданина-предпринимателя от грабежа или идеологического бандитизма государства, корпораций, экологических, других агрессивных организаций. Спорные вопросы – по принципу выгоды сообщества совершеннолетних жертв агрессивных организаций. Либерализм против национализации государством детей: до совершеннолетия дети принадлежат семье в лице родителей.
Пример нападения государства на семью: предоставление государством детям право выбора статуса трансгендера, с целью национализации детей. Национализация детей – превращение детей в собственность класса силовиков. Государство – силовая организация в лице класса силовиков.
Либерализм за минимальное вмешательство государства в профессиональную деятельность граждан-предпринимателей. Либерализм стремится к оптимальному балансу между правами и обязанностями граждан-предпринимателей, при котором они наиболее конкурентоспособны на мировом рынке, имеют с него больше выгоды.
Либерализму нужен оптимальный баланс между открытостью внутреннего и зарубежных рынков для максимума выгоды граждан-предпринимателей.
Класс силовиков заинтересован изменять до противоположного смысл слов «либерализм», «либерал» с целью не дать либералам объединяться – либерализм уменьшает финансирование класса силовиков. Поведение всех классов общества определяют биологические особенности человека. Класс силовиков при отсутствии политических противовесов (либерализм, Конституция) стремится к рабовладельческому государству с целью монопольного доступа класса силовиков к лучшим самкам, к классовой монополии на всю собственность (Коммунизм) в стране.
Класс силовиков называет либералов космополитами, глобалистами для использования против них законов об иностранных агентах. Космополитизм, глобализм не являются точными признаками либерализма. Но либералы-предприниматели сторонники экономического глобализма: экспорт товара дает окупаемость, рост прибыли за счет массового производства.
Смысл слова либерализм определяют интересы гражданского общества, а не отдельного класса общества. Смысл слова либерализм с точки зрения класса силовиков в основе противоположен смыслу слова либерализм с точки зрения гражданского общества. Либерализм основан на приоритете прав гражданина, семьи и гражданина-предпринимателя над правами агрессивных организаций.
Либерализм не имеет прямого отношения к госструктурам, международным структурам. Если о либерализме говорят как о идеологии, это не либерализм, а чисто классовое понятие, создаваемое классом силовиков в своих классовых интересах и не имеющее прямого отношения к либерализму как философии отражающей интересы гражданского общества. Пример: «либерализм западный», либерализм какой-то страны или международной структуры.
Либерализм не является постоянной госидеологией – он противоречит классовым интересам класса силовиков. Для борьбы с либерализмом класс силовиков агентурой создает агентурные «общественные» движения и организации с целью дискредитации, постепенной ликвидации либерализма.
Либерализм используют силовики как средство идеологической борьбы против других стран с целью расчленения как антинародных диктатур.
ЛИБЕРАЛ – человек защищающий права гражданина, семьи, гражданина-предпринимателя от грабежа или идеологического бандитизма государства, корпораций, экологических, других агрессивных организаций. Спорные вопросы – по принципу выгоды сообщества совершеннолетних жертв агрессивных организаций. Либерал против национализации детей: до совершеннолетия дети принадлежат семье в лице родителей.
Пример нападения государства на семью: предоставление государством детям право выбора статуса трансгендера, с целью национализации детей. Национализация детей – превращение детей в собственность класса силовиков. Государство – силовая организация в лице класса силовиков.
Либерал за минимальное вмешательство государства в профессиональную деятельность граждан-предпринимателей. Либерал стремится к оптимальному балансу между правами и обязанностями граждан-предпринимателей, при котором они наиболее конкурентоспособны на мировом рынке, имеют с него больше выгоды.
Класс силовиков заинтересован изменять до противоположного смысл слов «либерализм», «либерал» с целью не дать либералам объединяться – либерализм уменьшает финансирование класса силовиков. Поведение всех классов общества определяют биологические особенности человека. Класс силовиков при отсутствии политических противовесов (либерализм, Конституция) стремится к рабовладельческому государству с целью монопольного доступа класса силовиков к лучшим самкам, к классовой монополии на всю собственность (Коммунизм) в стране.
Класс силовиков называет либералов космополитами, глобалистами для использования против них законов об иностранных агентах. Космополитизм, глобализм не являются точными признаками либерализма. Но либералы-предприниматели сторонники экономического глобализма: экспорт товара дает окупаемость, рост прибыли за счет массового производства.
Смысл слова либерализм определяют интересы гражданского общества, а не отдельного класса общества. Смысл слова либерализм с точки зрения класса силовиков в основе противоположен смыслу слова либерализм с точки зрения гражданского общества. Либерализм основан на приоритете прав гражданина, семьи и гражданина-предпринимателя над правами агрессивных организаций.
Либерализм не имеет прямого отношения к госструктурам, международным структурам. Если о либерализме говорят как о идеологии, это не либерализм, а понятие созданное классом силовиков в своих классовых интересах и не имеющее прямого отношения к либерализму как философии отражающей интересы гражданского общества. Пример: «либерализм западный», либерализм какой-то страны или международной структуры.
ОБЩЕСТВЕННОЕ ДВИЖЕНИЕ – начальная стадия развития организации.
ЭКСПЛУАТАЦИЯ ЧЕЛОВЕКА ЧЕЛОВЕКОМ – это отношения «начальник – подчиненный» – главный механизм работы любого государства, всех его институтов, всей его экономики. Если эксплуатацию человека человеком убрать, государство мгновенно рухнет. Запрет эксплуатации человека человеком для частных предприятий в СССР привел к экономическому краху, распаду государства с потерей больше половины населения.
МАРКСИЗМ – изложенная в научной форме антипредпринимательская рабовладельческая экономическая программа бомжа-коммуниста Иисуса Христа вместе с христианским принципом изначальной с рождения виновности человека. Марксизм – это террористическая антипредпринимательская идеология, убившая сотни миллионов человек в разных странах. Марксизм вернул в страны рабовладельческий строй.
ГОСФЕОДАЛ – носитель наследственного права госвласти, охраняющий госсобственность на всё в стране и экономическую монополию государства (Коммунизм). Госфеодалы это результат обеднения феодалов от быстрого размножения. Наследникам не доставалось наследство, они устраивались на госслужбу в силовых структурах государства, становясь дворянами.
Желание дворян паразитировать на гражданском обществе привело их к идее госфеодализма – коммунистического государства где экономическая монополия государства защищает дворян от экономической конкуренции эксплуатируемого народа. Где правят дворяне в статусе госфеодал.
Первоисточник идеи государства госфеодалов (Коммунизм) – созданный еврооккупантами в Азии учебник рабовладельцев Евангелие, основанный на натравливании рабовладельцами общества против личного и семейного капитала рабов для экономической, идеологической диктатуры класса рабовладельцев.
Феодал – самая либеральная форма рабовладельца. Феодализм – самая либеральная форма рабовладельческого государства. Госфеодализм – экономически нежизнеспособная феодальная форма государства, ведущая его к экономическому краху как в СССР.
Коммунистические революции устраивают только дворяне. В Франции, Венгрии, Германии, России дворяне устроили коммунистическую революцию чтоб стать госфеодалами.
ПРИЗНАКИ РАБСТВА:
1. труд раба – это принудительный труд
2. рабам запрещена частная собственность
3. рабам запрещено предпринимательство
4. рабам запрещено эксплуатировать людей (отношения начальник – подчиненный)
5. рабам запрещено иметь личные денежные накопления
6. рабам запрещены личная выгода, личные интересы
7. рабам запрещено что либо или кого либо любить кроме своего рабовладельца (пример: заповедь-2 Библии). Любовь запрещена (кроме любви к своему рабовладельцу)
8. рабам запрещены эмоции
9. рабам запрещено иметь личные цели
10. рабам запрещено думать о будущем (не заботься о завтрашнем дне – слова рабовладельца Иисуса Христа с учебника рабовладельцев Евангелия).
11. принудительный коллективизм, коллективная ответственность.
Самый известный учебник рабовладельцев пришедший к нам с рабовладельческого строя – Библия. Классический рабовладельческий строй сменила его новая версия – Крепостной строй: рабам разрешено иметь семейное жилье и средства производства, но без права собственности на них. Жилье, средства производства и земля под ними – собственность рабовладельца-феодала.
Крепостной строй частично сохранился в Северной Корее, России, Китае где нет частной собственности на землю (аренда на 49 лет) в городах – она принадлежит госфеодалу в лице класса силовиков. Государство – аппарат насилия в лице класса силовиков.
КОММУНИЗМ – государство с экономикой работающей без денег и частной собственности. Единственная возможная экономика без денег и частной собственности – это рабовладельческая экономика, поэтому признаки коммунизма совпадают с признаками рабовладельческого государства. Коммунизм – мечта класса силовиков – вся собственность и все ключевые права в стране сосредоточены в руках силовиков – государство без денег и частной собственности.
Главный признак Коммунизма – это господство госпредприятий: вся экономическая власть у класса силовиков для шантажа оппонентов Коммунизма безработицей, голодом, отсутствием жилья, болезнями. Всех кто решает для себя проблему безработицы, голода, отсутствия жилья, болезней силовики отправляют в тюрьмы по обвинению в «тунеядстве», в «нетрудовых доходах», в «бродяжничестве».
Коммунизм – это рабовладельческий строй по Евангелию, из рабовладельцев, рабов, надзирателей над рабами. Надзиратель выполняет функции принуждения, управления, учета, контроля, распределения. Надзиратель в 2-5 раз дороже раба. Рабовладелец экономя деньги прикрепляет к надзирателю максимум рабов коллективизацией труда, укрупнением предприятий.
При коммунизме класс рабовладельцев – правящие кланы класса силовиков. Под предлогом заботы об гражданах вся собственность, все предприятия в стране по монопольному праву распоряжения собственностью принадлежат государству как аппарату насилия в лице класса силовиков. Гражданам-рабам внушают: собственность класса силовиков – общенародная собственность (общая собственность рабов).
Коммунистическое государство – это рабовладельческое государство с государственной формой рабовладения.
От Социализма Коммунизм отличает:
1. при Социализме не вся собственность в стране принадлежит государству. При коммунизме в стране вся собственность принадлежит государству, как в тюрьмах.
2. при Социализме часть экономики основана на деньгах, другая часть на очереди на блага. При Коммунизме деньги запрещены, экономика основана на очереди на блага. Блага выдает чиновник за идеологически правильное поведение.
Коммунизм – коллективизация средств производства, собственности, ответственности, профобразования, профконкуренции, человеческой мысли, бизнеса, жилья, земли с целью не дать одним гражданам-рабам профессионально возвыситься над другими гражданами-рабами – христианская борьба с гордыней. Гордыня – стремление человека к признанию обществом его профессиональных заслуг.
Борьбу с гордыней силовики обосновывают социальным равенством, защитой общества от его врагов – предпринимателей (капиталисты, буржуи), единоличников, интеллигенции.
Коммунизм это борьба класса силовиков с капиталом граждан, с гражданами стремящихся к профессиональному превосходству над людьми через официальный отказ государства от денег для обоснования перехода к распределению материальных и нематериальных благ чиновниками по принципу очереди граждан на блага и борьбы с капиталистическим обществом потребления (ограничение потребления снижением уровня жизни рабов).
Принцип очереди на блага: граждане-рабы стоят в очереди на блага (квартира, холодильник, унитаз...) к госчиновнику-рабовладельцу.
Большая часть граждан-рабов лишена большей части благ под предлогом борьбы государства за коммунистическое сознание (спасение души раба божьего по учебнику европейских рабовладельцев Евангелие) человека через борьбу государства с еретиками (единоличники, предприниматели, интеллигенция...). Налоги – официально без денег через тайное распределение созданной стоимости по принципу очереди на блага.
Первоисточник Коммунизма – созданный еврооккупантами в Азии учебник рабовладельцев Евангелие, основанный на натравливании рабовладельцами общества против личного и семейного капитала рабов для экономической, идеологической диктатуры рабовладельцев. Судя по анализу текста Евангелие создали европейские силовики в Азии с целью экономического геноцида (создание жизненного пространства для европейцев) азиатов, африканцев.
Личный, семейный капитал как угрозу диктатуре рабовладельцев уничтожают прогрессивными налогами. Рабовладельческий принцип социального равенства запрещает рабам частную собственность, предпринимательство, эксплуатацию человека.
Идея быть классом рабовладельцев чтоб все деньги, собственность, лучшие самки достались силовикам, делает их марионетками учебника рабовладельцев Евангелие.
КОММУНИСТ – человек который против частной собственности, против против денег и их накопления человеком или семьёй, сторонник равенства людей. Не путать равенство с равноправием: равенство ослабляет профессионально сильных людей, а равноправие усиливает. Деньги – мера обязанности общества человеку за принесенную им пользу обществу.
Силовикам коммунистическая идеология интересна как экономическая диктатура класса силовиков, известная как рабовладельческое государство с государственной формой рабовладения (коммунистическое государство).
Профессионально-генетическому мусору коммунистическая идеология выгодна для паразитирования на гражданском обществе.
Первоисточник идеологии коммунистов – учебник рабовладельцев Евангелие. Судя по анализу текста Евангелие создали европейские силовики в Азии с целью экономического геноцида (создание жизненного пространства для европейцев) азиатов, африканцев.
СОЦИАЛИЗМ – рабовладельческий строй по принципам Евангелие, из рабовладельцев, рабов, надзирателей над рабами. Надзиратель выполняет функции принуждения, управления, учета, контроля, распределения. Надзиратель в 2-5 раз дороже раба. Рабовладелец экономя деньги прикрепляет к надзирателю максимум рабов коллективизацией труда, укрупнением предприятий.
При социализме класс рабовладельцев – это правящие кланы класса силовиков. Под предлогом заботы об гражданах большая часть собственности в стране принадлежат государству как аппарату насилия в лице класса силовиков. Гражданам-рабам внушают: собственность класса силовиков – общенародная собственность (общая собственность рабов).
От Коммунизма Социализм отличает:
1. при Социализме не вся собственность в стране принадлежит государству. При коммунизме в стране вся собственность принадлежит государству, как в тюрьмах.
2. при Социализме часть экономики основана на деньгах, другая часть на очереди на блага. При Коммунизме деньги запрещены, экономика основана на очереди на блага. Блага выдает чиновник за идеологически правильное поведение.
Главный признак Социализма – это господство госпредприятий (прежде всего производство оружия): вся экономическая власть у класса силовиков для шантажа оппонентов Коммунизма безработицей, голодом, отсутствием жилья, болезнями. Всех кто решает для себя проблему безработицы, голода, отсутствия жилья, болезней силовики отправляют в тюрьмы по обвинению в «тунеядстве», в «нетрудовых доходах», в «бродяжничестве».
Социализм – это коллективизация средств производства, собственности, ответственности, профобразования, профконкуренции, человеческой мысли, бизнеса, жилья, земли с целью не дать одним гражданам-рабам профессионально возвыситься над другими гражданами-рабами – христианская борьба с гордыней. Гордыня – стремление человека к признанию обществом его профессиональных заслуг.
Борьбу с гордыней силовики обосновывают социальным равенством, защитой общества от его врагов – предпринимателей (капиталисты, буржуи), единоличников, интеллигенции.
Социализм это борьба класса силовиков с капиталом граждан, с гражданами стремящихся к профессиональному превосходству над людьми через распределение материальных и нематериальных благ чиновниками по принципу очереди граждан на блага и борьбы с капиталистическим обществом потребления (ограничение потребления уменьшением зарплат).
Принцип очереди на блага: граждане-рабы стоят в очереди на блага (квартира, холодильник, унитаз...) к госчиновнику-рабовладельцу.
Большая часть граждан-рабов лишена большей части благ под предлогом борьбы государства за социалистическое сознание (спасение души раба божьего по учебнику европейских рабовладельцев Евангелие) человека через борьбу государства с еретиками (единоличники, предприниматели, интеллигенция...). Часть налогов взимают тайным распределением созданной стоимости по принципу очереди на блага.
Первоисточник Социализма – созданный еврооккупантами в Азии учебник рабовладельцев Евангелие, основанный на натравливании рабовладельцами общества против личного и семейного капитала рабов для экономической, идеологической диктатуры рабовладельцев. Судя по анализу текста Евангелие создали европейские силовики в Азии с целью экономического геноцида (создание жизненного пространства для европейцев) азиатов, африканцев.
Личный, семейный капитал как угрозу диктатуре рабовладельцев уничтожают прогрессивными налогами. Рабовладельческий принцип социального равенства запрещает рабам частную собственность, предпринимательство, эксплуатацию человека.
Идея быть классом рабовладельцев чтоб все деньги, собственность, лучшие самки достались силовикам, делает их марионетками учебника рабовладельцев Евангелие.
КАПИТАЛИЗМ – экономическая система государства, признак которой: > 50% валового национального продукта ВНП создали частные предприниматели эксплуатирующие свободный труд свободных людей. Свободный труд – труд не по принуждению, как у рабовладельца, феодала, администрации тюрьмы (тюремный бизнес). Свободные люди – люди имеющие юридическую защиту от посягательства на их право частной собственности, право предпринимательства.
В Каменном веке частные предприниматели использовали свободный труд, их роль в ВНП племени < 50%, нет юридической защиты частной собственности и предпринимательства. В рабовладельческом, феодальном обществе свободный труд свободных людей создавал < 50% ВНП государства.
В равных условиях капиталист платил налогов государству больше рабовладельца или феодала – государство как заинтересованная сторона меняло юридическую и политическую систему государства в пользу капиталистов.
Капитализм современный – экономический индивидуализм, экономическая система государства основанная:
1. на праве человека на предпринимательство
2. на частной собственности на средства производства, землю, интеллектуальную собственность. Необходимый признак капитализма – частная собственность на землю в городах для защиты частных предприятий от злоупотребления властью госчиновниками.
3. на распределении товаров, услуг бесплатным механизмом рынка, а не оплачиваемыми налогоплательщиками госструктурами или госзаказами и законами, пролоббированными корпорациями
4. на всеобщем юридическом равноправии
5. на свободе предпринимательства
6. на праве коммерческой тайны (ограничено законами)
7. на свободном найме работников
8. на труде не по принуждению
9. на праве на профсоюз для защиты прав работников.
Госконтроль современного капитализма это:
1. госстандарты
2. сертификация товара, услуги
3. лицензии
4. патенты
5. субсидии
6. кредиты
7. госзаказы
Капитализм – система производства товаров, услуг, управляемая собственниками средств производства (движение капитала) и законами государства регулирующими рынок, найм работников. Капитал – стоимость средств производства + стоимость земли под предприятием (стоимость аренды) + деньги вложенные в найм работников предприятия. Порядок убывания приоритетов у большинства капиталистов (предпринимателей):
1. законы
2. прибыль
3. связи с капиталистами, госчиновниками, политиками
Капитализм не форма общественного строя в полном смысле слова. Форма общественного строя – экономическая система государства + система распределения доходов экономической системы государства + юридическая система. По законам, распределению доходов капитализм имеет любые промежуточные значения между социально-ориентированным капитализмом и социально-неориентированным капитализмом. Капитализм к социальной ориентации (базовый основной доход) двигает необходимость в покупателях товаров и услуг, в движении капитала. Без них капитализм не работает.
Капитализм – это баланс и борьба противоположностей: стремление частных предпринимателей (владельцы предприятий) к ограничению коллективизации капитала (средств производства) сталкивается с стремлением менеджеров и силовиков к коллективизации капитала с целью монополизации мирового рынка (империализм). Менеджеры с этого имеют ограничение вмешательства в их работу владельцев предприятия и монопольную сверхприбыль корпораций, а силовики налоги с сверхприбыли.
Свободе предпринимательства через законодательное лобби противодействуют (изменения законов, условий заключения госконтракта, условий размещения рекламы, коррупция…) менеджеры крупных корпораций с поддержкой класса силовиков, которого привлекают сверхналоги от сверхприбылей монополистических корпораций. Противодействие монополизации бизнеса класс силовиков блокирует ростом госдолга.
Монополизация бизнеса двигает экономику к монополистическому капитализму, характеризующегося переходом экономической власти от производителей товаров и услуг к финансовому капиталу. Финансовый капитал сращиваясь (браки представителей финансового капитала и правящих кланов силовиков) с госвластью, внедряя законами принудительное страхование, перераспределяет экономическую власть в пользу финансового капитала. Монополизация бизнеса заменяет рынок на распределение товаров, услуг финансовыми олигархами (территориальные монополии, лоббируемые законы, коррупционный выбор подрядчиков), силовиками (госзаказы, субсидии, лицензии, условия получения патента).
Научно-технический прогресс заменил феодальный общественный строй капитализмом. Промышленные технологии, разделение труда заменили среднеквалифицированный труд малым количеством более квалифицированного труда. Борьба с трудом способами, средствами уменьшения труда создала капитализм. Превышение предложения труда над спросом вынудило государства дать гражданам право свободы предпринимательства для экономии средств соцобеспечения граждан. Этот процесс ускорила промышленная революция Англии 19 века сделав рабовладельческий строй США экономически невыгодным.
Промышленные технологии, разделение труда, научные технологии сельского хозяйства внедрили капитализм в всем мире, вызвав взрывообразный рост населения планеты. Акции, деньги (эквивалент среднестатистических человеко-часов труда) позволили капиталистам создать транснациональные корпорации.
Враги капитализма – госпредприятия. Они не боятся банкротства – убытки покроют налогоплательщики. Госпредприятия заменяют рынок распределением товаров, услуг по социальному рейтингу государства. Государство – силовая организация в лице класса силовиков. Социальный рейтинг карает тех кто не выполняет классовые интересы силовиков, поощряет выполняющих.
В отличие от социального рейтинга рынок выполняет интересы гражданского общества, а не одного класса. Рынок и социальный рейтинг государства несовместимы: ~50% классовых интересов силовиков противоположны интересам гражданского общества.
КАПИТАЛИСТ – предприниматель или владелец контрольного пакета акций предприятия. Признаки капиталиста:
1. право распоряжения собственностью
2. право собственности как минимум на контрольный пакет акций предприятия
Если предприятием владеет семья – капиталистом является член семьи распоряжающийся основной частью собственности предприятия. Словосочетание «семья капиталистов» неверно по смыслу – не все члены семьи имеют признаки капиталиста.
Не является капиталистом менеджер без собственности на контрольный пакет акций предприятия.
У капиталистов нет госвласти.
ЕДИНОЛИЧНИК – экономический индивидуалист, стремящийся создать личную или семейную фирму, защитить частную собственность на землю и средства производства с целью экономической независимости от государства и экономической зависимости (налоги) государства от единоличников как способа защиты от идеологического бандитизма государства. Единоличник предпочитает работать на своих средствах производства, на своё частное предприятие, которое как и его жилище стоит на земле принадлежащей ему, а не государству.
ИДЕОЛОГИЧЕСКИЙ БАНДИТИЗМ ГОСУДАРСТВА – это стремление класса силовиков христианских стран по учебнику рабовладельцев Евангелие превратить государство в рабовладельческую организацию (класс силовиков это Бог-рабовладелец, граждане рабы божьи) с целью монопольного доступа силовиков к лучшим самкам, монополии класса силовиков на всю собственность в стране и национализации детей (дети – собственность класса силовиков как и вся остальная госсобственность, включая дождевую воду).
Аналогичную рабовладельческую систему христианские страны пытаются навязать всему человечеству (Мировая революция, экономические и медицинские программы ООН). Примеры идеологического бандитизма государства:
1. коммунистические революции в Франции, Венгрии, Германии, России.
2. цветные революции устроенные в 20 и 21 веке США, Францией и Россией в Китае, Вьетнаме, Камбодже, Лаосе, Афганистане, Ливии, Польше, Венгрии, Украине, других странах.
ГОСРЕГУЛИРОВАНИЕ ЖИЗНИ ЧЕЛОВЕКА – государство карает человека за попытки иметь собственные интересы, самостоятельно планировать свою жизнь. Государство через майоров и полковников спецслужб решает где и кем будет работать человек, какие профессии ему запрещены (например профессия предпринимателя, инженера, программиста), сколько ему разрешено иметь денег (борьба с богатством по идеологии Христа), с кем ему запрещено дружить или общаться (людям одинаковой породы запрещено общаться между собой), что ему запрещено читать, сколько ему разрешено жить (агентурное убийство пенсионеров фармацевтическими средствами). Госрегулирование жизни главный признак фашистского государства.
КОСТЮМ ТЕЛЕПРИСУТСТВИЯ – находящийся в стадии проектирования экзоскелетный интерфейс телеуправления андроидом через тактильную и силовую обратную связь в радиусе 6000км с задержкой управления (связь + её дешифровка + работа приводов) не более 0,1сек. Это экзоскелет с пропорциональными датчиками сил, углов и приводами рук, ног внутри 3D-кардана (пересечение 3-х осей в районе центра масс человека) + шлем с 3D-видео, 3D-звуком.
3D-кардан с датчиками угла и приводами передает пользователю векторы сил, ускорения, моменты действующие на аватара-андроида в 3 осях местного пространства.
Сферический экран шлема максимально возможного (руки человека снаружи экрана чтобы не попали в кадр) диаметра снижает вероятность головных болей и быстрой утомляемости пользователя от чрезмерного несоответствия (для мозга) расстояния «глаз – объект на экране» реальному расстоянию до этого объекта.
Сферический экран передает стереокартинку, векторы звуков. Чтоб не гнать обратной связью 150кадр/сек из-за задержки «наклон головы – смена картинки» шлем закреплен в экзоскелете туловища.
Силовая обратная связь костюма телеприсутствия передает по интернету в обе стороны:
1. углы (перемещения)
2. угловые скорости (скорости перемещения)
3. силы (моменты)
4. скорости изменения сил (скорости изменения моментов)
Интернет трафик каналов силовой обратной связи костюма телеприсутствия меньше 10Кб/сек. Трафик видеоканала или при наличии тактильного канала полнофункциональной (функции кожи среднестатистического человека) искусственной сенсорной кожи андроида – мегабайты в секунду.
Тактильная обратная связь с андроидом
Действия внешней среды на андроида тактильная обратная связь передает человеку:
1. силы, тактильными матрицами силы
2. температуры, тепловыми тактильными матрицами
3. тепловые потоки, тактильными матрицами теплового потока
Тепловыми тактильными матрицами человек на ощупь отличает теплопроводные материалы (металл, вода…) от нетеплопроводных (дерево…). Металл не меняет температуры после контакта с кожей. Дерево после контакта с кожей быстро нагревается.
По скорости нагрева кожи, по цифре и направлению теплового потока человек различает метал от пластмассы, пластмассу от дерева. Тепловая тактильная матрица может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека.
При температурах близких к температуре тела человека или выше, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Костюм телеприсутствия для управления аватаром Метавселенной
Костюм телеприсутствия будут использовать как костюм для Метавселенных. Фон, часть объектов Метавселенной протокол кеширования заранее грузит в компьютер пользователя, обновляя при изменениях. Костюм телеприсутствия в Метавселенной – это ведущий домен состоящий из человека + костюм телеприсутствия. Ведущий домен через сетевой домен управляет ведомым доменом.
Сетевой домен – аватар-сайт связывающий по интернету Ведущий и Ведомый домены.
Ведомый домен – управляемый человеком человекоподобный аватар Метавселенной.
Действия среды Метавселенной на аватара линия связи передает человеку:
1. силы реакции среды Метавселенной действующие на аватара
2. ориентацию туловища аватара в пространстве Метавселенной передает человеку 3D-кардан
3. стереокартинку
4. векторы прихода 3D-звука
5. виртуальные силы передают человеку тактильные матрицы силы
6. виртуальные температуры передают человеку тепловые тактильные матрицы
7. виртуальные тепловые потоки передают человеку тактильные матрицы теплового потока
Сигналы тактильной обратной связи симулирует софт среды Метавселенных
Костюмы телеприсутствия по типу управления аватаром делят на:
1. однодатчиковые костюмы телеприсутствия: привод держит постоянной силу датчика-1 силы экзоскелета руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина.
2. двухдатчиковые костюмы телеприсутствия: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод.
Скорость привода костюма телеприсутствия прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
Общественную потребность в костюме телеприсутствия создает планируемое освоение природных ресурсов на других планетах, освоение природных ресурсов в многокилометровой глубине дна океанов; обслуживание вредных, опасных (химических, радиоактивных…) производств и оказание квалифицированной медпомощи больным в районах опасной эпидемии.
Военное применение костюма телеприсутствия
Военное применение костюма телеприсутствия ограничено помехоустойчивостью канала обратной связи с андроидом к создаваемым противником помехам. Проблему помехоустойчивости канала обратной связи планируют решить встречно-узконаправленными лазерными лучами с датчиковым и инерциально-гироскопическим взаимным самонаведением лучей лазерной связи. Возможна обратная связь узконаправленными рентгеновскими, ультрафиолетовыми, инфракрасными, терагерцовыми лучами.
Борьба с помехами противника предполагает гонку мощностей лучей обратной связи в полях сражений. Чувствительность приемных каналов обратной связи софт андроида по калибровочному сигналу ставит обратно пропорционально мощности лучей на приемнике – защита от помех. На расстоянии до 2км в условиях гонки мощностей лучей равными противниками непрерывно полностью блокировать все частоты электромагнитных волн в время войны нереально, учитывая вариант с псевдослучайным перескоком частоты передатчика, приемника.
Вмешательство хакера маловероятно: диалоговый пароль + динамическая шифровка канала + добавление в канал сигнала генератора случайных чисел + неизвестный алгоритм сжатия канала + учет истории ракурса прихода сигнала приемника.
От электромагнитных бомб компьютер робота можно защитить высоковольтными (производятся контролеры на 500V для электромоторов) микропроцессорами + многослойная активная (электростатическая + электромагнитная) экранировка + замена всех проводов заземленными коаксиальными кабелями или оптоволокном.
Вариант: управление андроидом по многокилометровому коаксиальному (защита от помех) кабелю (цифровой сигнал на высоковольтной СВЧ-несущей частоте) или оптоволокну, сматывающегося с катушки на спине андроида.
Для защиты андроида от применяемых противником импульсных источников излучений андроид наделят элементами искусственного интеллекта. При потере управления военный андроид сохранит вектор, скорость перемещения, другие действия по таймерным, программным установкам.
Разными фирмами мира изготовлены все составные материальные элементы костюма телеприсутствия, созданы протоколы передачи информации силовой обратной связи с копирующими манипуляторами.
Самые сложные в разработке части костюма телеприсутствия – быстродействующий привод экзоскелета и экзоперчатка с силовой обратной связью с кистью руки виртуального аватара.
Экзоперчатка с силовой обратной связью
Экзоперчатку с силовой обратной связью в 2012г демонстрировала фирма Festo: человек экзоперчаткой через силовую обратную связь по проводам управлял кистью руки робота-аватара.
Пример современной экзоперчатки – HaptX Gloves от фирмы HaptX. В ней силовая и тактильная (на кончиках пальцев) обратная связь, матрица-передатчик тактильной обратной связи.
При управлении кистью аватара в Метавселенной роль тактильной матрицы-приемника играет виртуальная кожа аватара. Тактильный сигнал виртуальной кожи для экзоперчатки человека симулирует софт Метавселенной.
Быстродействующий привод экзоскелета
Проблема задержки управления экзоскелетом решена в конструкции привода андроида Хонда Асимо: электромотор-маховик постоянного вращения крутит две магнитореологические муфты сцепления.
Магнитореологическая муфта сцепления-1 включает волновый редуктор-1. Магнитореологическая муфта сцепления-2 включает волновый редуктор-2.
Шкив выходного вала редуктор-1 тянет трос сгибателя руки (ноги) андроида.
Шкив выходного вала редуктор-2 тянет трос разгибателя руки (ноги) андроида.
Муфты работают в постоянной малой противофазе управляемой компьютером для компенсации (автомат стабилизации силы в тросах) зазоров, упругих деформаций экзоскелета.
Магнитореологическая муфта сцепления андроида Асимо соединяет маховик с редуктором за 0,02сек, что соответствует техусловиям обратной связи костюма телеприсутствия. Требуемую физиологией (безопасное пользование без обучения) человека задержку управления аватаром не > 0,1сек определяет средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Hz.
Волновые редукторы (КПД=82 %) шумны, дороги, недолговечны – ожидается переход на дешевый бесшумный долговечный привод «винт – гайка скольжения», который втрое легче волнового редуктора: у гайки нагрузка равномерно распределена на немалую упорную поверхность 3-9 витков резьбы, у волнового редуктора вся многотонная в толчке нагрузка экзоскелета давит на 3-4 точек в зубьях.
Задержка управления
Задержка управления андроидом равна времени задержки управления приводами костюма телеприсутствия при передаче человеком сигнала андроиду + время передачи сигнала по линии связи к андроиду + время отработки сигнала человека приводами андроида + время передачи сигнала о выполненном движении по линии связи от андроида к человеку + время отработки приводами костюма телеприсутствия сигнала от андроида.
Задержка управления андроидом равна удвоенному времени передачи сигнала в одну сторону + удвоенное время работы приводов костюма телеприсутствия + время отработки сигнала приводами андроида.
Для реверсивных машин (костюм телеприсутствия) задержка управления приводом – это половина времени цикла «разгон – торможение – реверсивный разгон – торможение» с учетом упругих деформаций, люфтов.
Минимальную задержку управления аватаром через интернет дает бессерверная обратная связь.
Применение костюма телеприсутствия
Костюм телеприсутствия рассматривают госпрограммы освоения многокилометровых глубин океана принятые в Японии, России. На дне 5,6км Тихого океана Япония найдя месторождения редкоземельных металлов в 1000 раз больше мировых запасов, приняла госпрограмму освоения ресурсов морского дна. Арктика: 30% мировых запасов нефти, газа: в Карском море 13 млрд тонн нефти.
Домашний костюм телеприсутствия как средство телеуправления андроидом по криптозащищенной интернет-линии, позволяет рабочим, инженерам не выходя из дома дистанционно работать андроид-аватаром подводного города (разработка природных ресурсов: нефть, газ, редкоземельные металлы…) в многокилометровой глубине Северного ледовитого океана. Андроид подводного предприятия работает 24ч в сутки с передачей управления андроидом между человеками-операторами разных смен.
Передача управления с домашнего костюма-1 телеприсутствия (человек-оператор-1) к костюму-2 телеприсутствия (оператор-2): оператор-2 примет работу в режиме односторонней (от андроида) обратной связи. В костюме-1 телеприсутствия усиление в направлении «человек – андроид» уменьшается до нуля (сигнализация + процент усиления в экране шлема). В костюме-2 телеприсутствия усиление растет до 100% (сигнализация + процент усиления в экране шлема).
Рыночный потенциал костюма телеприсутствия
Мировой рыночный потенциал домашнего костюма телеприсутствия, как костюма виртуальной реальности многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор), профессиональных и рекламных сайтов, обещает многократно превзойти мировой рыночный потенциал автомобиля (60% мировой промышленности: подрядчики, субподрядчики).
КОСТЮМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ (универсальный симулятор) – находящийся в стадии проектирования экзоскелетный интерфейс для управления человекоподобным аватаром в Метавселенных через тактильно-силовую обратную связь в радиусе 6000км с задержкой управления (связь + её дешифровка + работа сервера + работа приводов) не более 0,1сек.
Это экзоскелет с пропорциональными датчиками сил, углов и приводами рук, ног внутри 3D-кардана (пересечение 3-х осей в районе центра масс человека) + шлем с 3D-видео и 3D-звуком. 3D-кардан с датчиками угла и приводами передает пользователю векторы сил, ускорения, моменты действующие на тело аватара в 3 осях местного пространства.
Сферический экран шлема максимально возможного (руки человека снаружи экрана чтобы не попали в кадр) диаметра снижает вероятность головных болей и быстрой утомляемости пользователя от чрезмерного несоответствия (для мозга) расстояния «глаз – объект на экране» реальному расстоянию до этого объекта.
Сферический экран передает стереокартинку, векторы звуков. Чтоб не гнать обратной связью 150кадр/сек из-за задержки «наклон головы – смена картинки» шлем закреплен в экзоскелете туловища.
Силовая обратная связь костюма виртуальной реальности передает по интернету в обе стороны:
1. углы (перемещения)
2. угловые скорости (скорости перемещения)
3. силы (моменты)
4. скорости изменения сил (скорости изменения моментов)
Интернет трафик каналов силовой обратной связи костюма виртуальной реальности меньше 10Кб/сек. Трафик видеоканала или при наличии тактильного канала полнофункциональной (функции кожи среднестатистического человека) искусственной сенсорной кожи аватара – мегабайты в секунду.
Костюм виртуальной реальности для управления аватаром Метавселенной
Костюм виртуальной реальности будут использовать как костюм для Метавселенных. Фон, часть объектов Метавселенной протокол кеширования заранее грузит в компьютер пользователя, обновляя при изменениях. Костюм виртуальной реальности в Метавселенной – это ведущий домен состоящий из человека-оператора и костюма для Метавселенных, который через сетевой домен будет управлять ведомым доменом.
Сетевой домен – интернет-сайт связывающий Ведущий, Ведомый домены.
Ведомый домен – управляемый человеком человекоподобный аватар Метавселенной.
Действия среды Метавселенной на аватара линия связи передает человеку:
1. силы реакции среды Метавселенной действующие на аватара
2. ориентацию туловища аватара в пространстве Метавселенной передает человеку 3D-кардан
3. стереокартинку
4. векторы прихода 3D-звука
5. виртуальные силы передают человеку тактильные матрицы силы
6. виртуальные температуры передают человеку тепловые тактильные матрицы
7. виртуальные тепловые потоки передают человеку тактильные матрицы теплового потока
Сигналы тактильной обратной связи симулирует софт среды Метавселенных
Тепловыми тактильными матрицами человек на ощупь отличает теплопроводные материалы (металл, вода…) от нетеплопроводных (дерево…). Металл не меняет температуры после контакта с кожей. Дерево после контакта с кожей быстро нагревается.
По скорости нагрева кожи, по цифре и направлению теплового потока человек различает метал от пластмассы, пластмассу от дерева. Тепловая тактильная матрица может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека.
При температурах близких к температуре тела человека или выше, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Костюмы виртуальной реальности по типу управления аватаром делят на:
1. однодатчиковые костюмы виртуальной реальности: привод держит постоянной силу датчика-1 силы экзоскелета руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина
2. двухдатчиковые костюмы виртуальной реальности: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод
Скорость привода костюма виртуальной реальности прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
Разными фирмами мира изготовлены все составные материальные элементы костюма виртуальной реальности, созданы протоколы передачи информации силовой обратной связи с аватаром виртуальной реальности.
Самые сложные в разработке части костюма виртуальной реальности – быстродействующий привод экзоскелета и экзоперчатка с силовой обратной связью с кистью руки виртуального аватара.
Экзоперчатка с силовой обратной связью
Экзоперчатку с силовой обратной связью в 2012г демонстрировала фирма Festo: человек экзоперчаткой через силовую обратную связь по проводам управлял кистью руки робота-аватара.
Пример современной экзоперчатки – HaptX Gloves от фирмы HaptX. В ней силовая и тактильная (на кончиках пальцев) обратная связь, матрица-передатчик тактильной обратной связи.
При управлении кистью аватара в Метавселенной роль тактильной матрицы-приемника играет виртуальная кожа аватара. Тактильный сигнал виртуальной кожи для экзоперчатки человека симулирует софт Метавселенной.
Быстродействующий привод экзоскелета
Проблема задержки управления экзоскелетом решена в конструкции привода андроида Хонда Асимо (Asimo прыгает с аккумулятором на одной ноге): электромотор-маховик постоянного вращения крутит две магнитореологические муфты сцепления.
Магнитореологическая муфта сцепления-1 включает волновый редуктор-1. Магнитореологическая муфта сцепления-2 включает волновый редуктор-2.
Шкив выходного вала редуктор-1 тянет трос сгибателя руки (ноги) андроида. Шкив выходного вала редуктор-2 тянет трос разгибателя руки (ноги) андроида. Муфты работают в постоянной малой противофазе управляемой компьютером для компенсации (автомат стабилизации силы в тросах) зазоров, упругих деформаций экзоскелета.
Магнитореологическая муфта сцепления андроида Асимо соединяет маховик с редуктором за 0,02сек, что соответствует техусловиям обратной связи костюма виртуальной реальности. Требуемую физиологией (безопасное пользование без обучения) задержку управления аватаром не > 0,1сек определяет средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Hz.
Задержка управления андроидом через костюм виртуальной реальности > чем аватаром виртуальной реальности: в задержку управления виртуальным аватаром не входит задержка работы приводов андроида.
Задержка управления аватаром виртуальной реальности равна времени задержки управления приводами костюма виртуальной реальности при передаче человеком сигнала аватару + время передачи сигнала по линии связи к аватару + время вычисления реакции аватара компьютером сервера + время передачи сервером сигнала о выполненном аватаром движении по линии связи к человеку + время отработки приводами костюма виртуальной реальности сигнала от аватара.
Задержка управления аватаром виртуальной реальности в сайтах интернета равна удвоенному времени передачи сигнала в одну сторону + удвоенное время работы приводов костюма виртуальной реальности + время вычисления реакции аватара компьютером сервера.
Для реверсивных машин (костюм виртуальной реальности) задержка управления приводом это половина времени цикла «разгон – торможение – реверсивный разгон – торможение» с учетом упругих деформаций, люфтов.
Минимальную задержку управления аватаром через интернет дает бессерверная обратная связь.
Рыночный потенциал костюма виртуальной реальности
Общественную потребность в костюме виртуальной реальности создает быстро растущий мировой рынок многопользовательских
интернет-игр. Мировой рыночный потенциал домашнего костюма виртуальной реальности, как средства управления аватаром Метавселенных в многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор) и рекламных сайтах, обещает превзойти мировой рыночный потенциал автомобиля (60% мировой промышленности: подрядчики, субподрядчики).
Домашний костюм виртуальной реальности создаст эффект полного силомоментного участия человека через интернет-сайт в виртуальном мире неотличимом от реального. Пользователь домашнего костюма виртуальной реальности сможет заниматься альпинизмом на Земле, на других планетах по цифровым картам, параметрам (трение, твёрдость, прочность, сыпучесть, температура, теплопроводность) симулируемой среды. Виртуальные путешествия в любое небесное тело Галактики или внутри тела человека (выбор пользователем масштаба). Турсайты: виртуальные путешествия в любую точку планеты, хоть на дно Марианской впадины (в образе андроида) с полным использованием её базы данных. Виртуальная машина времени воспроизведет для пользователя: участие в любом событии Истории, общение с её персонажами: играют актеры, волонтеры с сайтов.
Международный протокол виртуального мира соединит пользователей в сеть «Матрица»: сеть общения виртуального мира, неотличимого от реального. В «Матрица» актеры симулируют для остальных пользователей известных исторических и современных личностей с разных стран в соответствующих виртуальных декорациях. Платные аватарные пользователи «Матрица» смогут общаться с известными историческими и современными личностями, путешествовать с ними, заниматься с ними сексом.
Чтоб виртуальные известные личности не встретились с самим собой, Международный протокол виртуального мира «Матрица» организует Параллельные (Альтернативные) Вселенные (выбор пользователя). Игры, путешествия в домашнем костюме виртуальной реальности в виртуальное будущее: хоть многопользовательские звездные войны Галактических империй: сотни миллионов пользователей-участников одновременно играющих в грандиозной по масштабам игре за или против других пользователей-участников.
КОСТЮМ ДЛЯ ВХОДА В МЕТАВСЕЛЕННУЮ – находящийся в разработке экзоскелетный интерфейс полного силового участия человека-оператора в роли человекоподобного аватара Метавселенной в общем, для миллионов пользователей костюма, интернет-событии или игре. Миллионы аватаров с их владельцами смогут одновременно участвовать в событиях Метавселенной.
Костюм для входа в Метавселенную представляет собой костюм виртуальной реальности – экзоскелет с пропорциональными датчиками сил, углов и приводами рук, ног внутри 3D-кардана (пересечение 3-х осей в районе центра масс человека) + шлем с 3D-видео и 3D-звуком. 3D-кардан с датчиками угла и приводами передает пользователю векторы сил, ускорения, моменты действующие на тело аватара в 3 осях виртуального пространства Метавселенной.
Костюм для входа в Метавселенную создаст эффект полного силового участия человека в виртуальном мире Метавселенной, неотличимом от реального. Пользователь сможет в Метавселенной заниматься альпинизмом на Земле, на других планетах по цифровым картам, параметрам (трение, твёрдость, прочность, сыпучесть, температура, теплопроводность) симулируемой среды.
Виртуальные путешествия в любое небесное тело Галактики или внутри тела человека (выбор пользователем масштаба). Турсайты: виртуальные путешествия в любую точку планеты, хоть на дно Марианской впадины с полным использованием её базы данных.
Костюм для входа в Метавселенную позволит не выходя из дома при покупке одежды примерить её на своё тело, потрогать руками цифровой аналог реального товара в цифровом супермаркете.
Среда Метавселенной – интернет, мобильная связь 5G и 6G. В будущем оборот денег Метавселенных превысит оборот денег реальной (невиртуальной) мировой экономики, создаст новые отрасли бизнеса, профессии, рынки, сферы услуг, навыки.
Идут попытки стандартизации протоколов Метавселенных для свободных переходов пользователя с одной Метавселенной в другую с своей виртуальной частной собственностью и верифицированной сетевым доменом личной историей пользователя.
Функциональность протоколов Метавселенной пока сильно ограничена из-за отсутствия коммерческих образцов костюмов для входа в Метавселенную с тактильной и силовой (силомоментной) обратными связями.
Силовая обратная связь костюма для входа в Метавселенную передает по интернету в обе стороны:
1. углы (перемещения)
2. угловые скорости (скорости перемещения)
3. силы (моменты)
4. скорости изменения сил (скорости изменения моментов)
Интернет трафик каналов силовой обратной связи костюма виртуальной реальности меньше 10Кб/сек. Трафик видеоканала или при наличии тактильного канала полнофункциональной (функции кожи среднестатистического человека) искусственной сенсорной кожи аватара – мегабайты в секунду.
Костюм виртуальной реальности для управления аватаром Метавселенной
Костюм виртуальной реальности будут использовать как костюм для Метавселенных. Фон, часть объектов Метавселенной протокол кеширования заранее грузит в компьютер пользователя, обновляя при изменениях. Костюм виртуальной реальности в Метавселенной – это ведущий домен состоящий из человека-оператора и костюма для Метавселенных, который через сетевой домен будет управлять ведомым доменом.
Сетевой домен – интернет-сайт связывающий Ведущий, Ведомый домены.
Ведомый домен – управляемый человеком человекоподобный аватар Метавселенной.
Действия среды Метавселенной на аватара линия связи передает человеку:
1. силы реакции среды Метавселенной действующие на аватара
2. ориентацию туловища аватара в пространстве Метавселенной передает человеку 3D-кардан
3. стереокартинку
4. векторы прихода 3D-звука
5. виртуальные силы передают человеку тактильные матрицы силы
6. виртуальные температуры передают человеку тепловые тактильные матрицы
7. виртуальные тепловые потоки передают человеку тактильные матрицы теплового потока
Сигналы тактильной обратной связи симулирует софт среды Метавселенных
Тепловыми тактильными матрицами человек на ощупь отличает теплопроводные материалы (металл, вода…) от нетеплопроводных (дерево…). Металл не меняет температуры после контакта с кожей. Дерево после контакта с кожей быстро нагревается.
По скорости нагрева кожи, по цифре и направлению теплового потока человек различает метал от пластмассы, пластмассу от дерева. Тепловая тактильная матрица может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека.
При температурах близких к температуре тела человека или выше, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Шлем виртуальной реальности
Сферический экран шлема максимально возможного (руки человека снаружи экрана чтобы не попали в кадр) диаметра снижает вероятность головных болей и быстрой утомляемости пользователя от чрезмерного несоответствия (для мозга) расстояния «глаз – объект на экране» реальному расстоянию до этого объекта.
Сферический экран передает стереокартинку, векторы звуков. Чтоб не гнать обратной связью 150кадр/сек из-за задержки «наклон головы – смена картинки» шлем закреплен в экзоскелете туловища.
Разными фирмами мира изготовлены все составные материальные элементы костюма для входа в Метавселенную, созданы сетевые протоколы передачи тактильной и силовой обратной связи с аватаром виртуальной реальности.
Самые сложные в разработке части костюма для входа в Метавселенную – быстродействующий привод экзоскелета и экзоперчатка с силовой обратной связью с кистью руки виртуального аватара.
Экзоперчатка с силовой обратной связью
Экзоперчатку с силовой обратной связью в 2012г демонстрировала фирма Festo: человек экзоперчаткой через силовую обратную связь по проводам управлял кистью руки робота-аватара.
Быстродействующий привод экзоскелета
Проблема задержки управления экзоскелетом решена в конструкции привода андроида Хонда Асимо: электромотор-маховик постоянного вращения крутит 2 магнитореологические муфты сцепления.
Магнитореологическая муфта сцепления-1 включает волновый редуктор-1.
Магнитореологическая муфта сцепления-2 включает волновый редуктор-2.
Шкив выходного вала редуктор-1 тянет трос сгибателя руки (ноги) андроида. Шкив выходного вала редуктор-2 тянет трос разгибателя руки (ноги) андроида. Муфты работают в постоянной малой противофазе управляемой компьютером для компенсации (автомат стабилизации силы в тросах) зазоров, упругих деформаций экзоскелета.
Магнитореологическая муфта сцепления андроида Асимо соединяет маховик с редуктором за 0,02сек, что соответствует техусловиям обратной связи костюма телеприсутствия. Требуемую физиологией (безопасное пользование без обучения) человека задержку управления аватаром не > 0,1сек определяет средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Hz.
ДАТЧИК – средство измерения физического, химического параметра, характеризующего окружающую среду, процессы внутри организмов или технических объектов. Датчики – управляющий элемент систем отрицательной обратной связи: биодатчики управляют системами стабилизации параметров (температура, химический состав крови…) организма животных.
Датчики используют для управления функцией, для передачи, хранения, регистрации, диагностики объекта (системы). Датчики: число измерений физ. величин в промышленности: температура 50%, расход (масса, объем) 15%, давление 10%, уровень 5%, количество (масса, объем) 5%, время 4%, электрические и магнитные величины 4%.
Исторически первый датчик созданный человеком – спусковой механизм (веревка, палка) при наступлении на него освобождавший энергию (усилитель) упругости ветки (вес груза) при ловле дичи на силки (исполнительный механизм) предками человека.
Датчики:
1. датчик релейного типа (конечный выключатель): 2 состояния: включено, выключено
2. датчик пропорциональный меняет выходной сигнал пропорционально входному действию
Датчики:
1. датчик контактный. Пример: конечный выключатель
2. датчик бесконтактный. Пример: доплеровский измеритель (радар) скорости, бокового сноса (биения отраженного сигнала с разнесенных приемников) крылатой ракеты
Датчики:
1. датчик управляющий (датчик обратной связи). В автоматических системах в отрицательной обратной связи. В режиме положительной обратной связи: в бесконтактных детонаторах военных боеприпасов, в устройствах контроля проноса запрещенных веществ и предметов в аэропортах…
2. датчик контрольно-измерительный: дает цифру в экран для оператора системы, в средство отображения датчика ручного.
Датчика сигналы:
1. Аналоговый сигнал – аналоговый датчик. Частный случай аналогового сигнала: сигнал рассогласования колебательного контура (или другого базового параметра) датчика с колебательным контуром (с базовым параметром) системы управления рабочим органом или системы диагностики
2. Цифровой (импульсно-кодовая модуляция) сигнал – цифровой датчик.
АЦП, ЦАП
Цифровой датчик дает параметр, разность, соотношение параметров в коде (двоичный, троичный): импульсы одинаковой амплитуды + паузы (или смена полярности импульса) между импульсами кратны по времени к минимальной паузе. Троичный код: импульсы + паузы + смена полярности импульса. Шум, неточность аналого-цифрового преобразователя АЦП линейно растут с частотой кривой. Фазовый сдвиг между частотой дискретизации сигнала, высокими частотами сигнала дает биения в сигнале, прошедшем АЦП, цифроаналоговый преобразователь ЦАП: в воспроизведении с микрофона (аналоговый датчик звука) АЦП, ЦАП снижают прозрачность высоких частот звука. Аналоговые датчики 3-10 раз быстрее цифровых, 3-5 раз точнее, дают более качественный сигнал. Трафик аналогового сигнала 3-4 раза меньше цифрового. Цифровые датчики выгоднее в долговременной записи, перезаписи сигнала, в передаче сигнала в условиях помех на расстояние > 20-30м.
Датчики:
1. датчик прямого преобразования внешнего действия в электросигнал: свет в фотоэлементе – сигнал. Неограниченно число физических, химических вариантов прямого преобразования
2. датчик промежуточного преобразования: фотоэлемент фиксирует пролет элементарной частицы в веществе по вызванной ею вспышке света
Датчики:
1. датчик активный: для получения сигнала воздействует на объект измерения искусственным энергоисточником, входящим в объект с датчиком. Пример: радар, лидар…
2. датчик полуактивный: для сигнала воздействует на объект измерения искусственным энергоисточником, не входящим в объект с датчиком. Пример: радар зенитной или авиационной ракеты, имеющей приемник радарных импульсов в самой ракете, но использующей внешний (не входит в конструкцию ракеты) передатчик радарных импульсов на земле, на самолете
3. датчик пассивный: для сигнала не воздействует на объект искусственным излучением дополнительной энергии. Пример: тепловизор, телекамера, глаз
Датчики:
1. датчик одноканальный (одномерный) дает 1 цифру измеряемого параметра. Пример: вольтметр, амперметр, частотомер, манометр, датчик силы, датчик угла…
2. датчик многоканальный (многомерный) дает информацию в табличной форме. Пример: глаз, телекамера, сенсорный экран, нейтринный телескоп, пузырьковые камеры в ядерной физике, радиотелескоп, оптический телескоп, инфракрасный телескоп, рентгеновский телескоп, микроскоп, томограф… В компьютерных играх, симуляторах функцию датчик многоканальный выполняют мультиплексированные сигналы интерфейса пользователя. Функцию виртуальных датчиков в виртуальной реальности выполняют выходные каналы информации с баз данных (матрицы уравнений обратной связи или таблицы решений) софта компьютерных симуляторов, игр. В математике датчик многоканальный симулирует матрица переменных.
У части датчиков многоканальных диаграмму направленности, фокусировку, установку угла обзора выполняет не материальная структура, а софт. В фазированной антенной решетке нужные диаграмму направленности, фокус дает сканирование передающих или чувствительных ячеек с заданным софтом (или матрицей линий задержки) каждому углу, фокусу временными задержками. Фазированные антенные решетки истребителей раздельно сопровождают до 40 целей. В пленоптической (матрица мелких линз) фотокамере (телекамере) устанавливает угол обзора, фокусирует чисто программно софт, меняя порядок сканирования чувствительных ячеек матрицы отдельно для каждой линзы. Развертка за счет движения спутника вокруг планеты заменила многоканальный датчик одноканальным. Так получена радиолокационная (для крылатых ракет), гравитационная (для баллистических ракет) карты Земли.
Датчики многоканальные (многомерные):
1. датчики без мультиплексирования: табличный многоканальный выход
2. датчики с мультиплексированием. Мультиплексирование – соединение нескольких каналов связи в одноканальную или двухпроводную связь
Мультиплексирование датчиков:
1. временное разделение каналов сканированием коммутатором ячеек табличного датчика с кадровым импульсом или кодом конца цикла в выходном сигнале.
2. импульсно-кодовая модуляция. Используют: Интернет, телеметрия. Число каналов неограниченно
3. амплитудно-полярная модуляция: в разной полярности разные амплитуды несущей частоты. Использовали: стереофоническое аналоговое радиовещание
4. частотно-полярная модуляция: несущая частота больше частоты полярности.
Многочастотно-полярная модуляция: несущие частоты больше частоты полярности, в разной полярности разная несущая частота. Последовательность несущих частот может меняться. Число несущих частот неограниченно
5. многочастотная модуляция. Используют: радиоуправление моделями, телеметрия
6. многочастотная фазовая модуляция. Используют: радиоуправление моделями, телеметрия
7. суммарный сигнал + урезанный разностный сигнал на повышенной частоте, отделяемой фильтром от суммарного + восстановление разностного сигнала его биениями с эталонной частотой. Использовали: квадрафоническая запись грампластинок
Датчики:
1. внешний датчик
2. датчик встроен в микросхему
3. датчик встроен в рабочий орган. Пример: оптоволоконный датчик удлинения (на биениях частот) в виде оптоволокна с зеркальным торцом с одного стороны и когерентным светодиодом с другого торца, вклеенный между углеволокнами в углепластиковых конструкциях.
Выходные сигналы датчиков по энергии: электрические, механические, пневматические, гидравлические.
Датчики:
1. Датчик инкрементный вместо цифры дает величину её относительного изменения
2. Датчик случайных чисел, датчик времени (часы) – единственные датчики создающие сигнал без внешней среды
Датчики следящих приводов: датчик-передатчик, датчик-приемник: каждый датчик то и другое попеременно.
Датчик с системой управления соединяют: устройства усиления сигнала, линеаризации, дискретизации, калибровки, аналого-цифрового преобразования, интерфейс.
Датчик ручной – измерительный прибор для человека (как элемента системы): лазерная рулетка, измеритель радиации, вольтметр, амперметр, микрометр…
Параметры датчиков: диапазон чувствительности; погрешность; порог чувствительности; разрешающая способность; отношение сигнал-шум; постоянная времени; частотная характеристика; закон изменения выходной величины от входного действия; пределы изменений входных, выходных величин, диапазон температур, диапазон давлений, диапазон скоростей.
Гистерезис датчика – максимальная разница между измерениями-1-2 датчика. Измерение-1 при уменьшении нагрузки с номинальной выходной мощности. Измерение-2 при увеличении нагрузки с нуля.
Разрешающая способность – минимальное изменение измеряемой цифры которое чувствует датчик.
500м - навигационная точность гравитационного датчика гантельного типа (вес 20кг) ядерной ракеты «Трайдент» независимо от дальности (гравикарта от спутника). В новых ядерных ракетах перешли на гравитационную навигационную систему из 2-х взаимно перпендикулярно соединенных одним концом интерферометров Майкельсона с немагнитными тяжелыми зеркалами на всех 3-х концах датчика. У неё точность ~90м независимо от дальности полета, не работает на конечном атмосферном участке траектории полета из-за вибрации. На конечном участке работают спутниковая и инерциальная системы навигации.
Конструктивный аналог новой гравитационной навигационной системы ядерных ракет – датчик гравитационных волн LIGO из 2 взаимно перпендикулярно соединенных одним концом интерферометров Майкельсона, дающих выходной сигнал по принципу накопления сдвига фаз между импульсами света обоих 4-километровых плеч датчика LIGO. Датчик LIGO впервые в истории детектировал гравитационные волны.
Для увеличения чувствительности в каждом из двух плеч датчика LIGO ячейка Фарадея (модулятор света) пропускает через полупрозрачное зеркало-1 монохроматический импульс света к парному ему зеркалу-2 на расстоянии 4км. Затем ячейка Фарадея делает зеркало-1 непрозрачным, пока импульс света не переотразится между зеркалами 4000 раз. Затем ячейка Фарадея делает зеркало-1 снова прозрачным, чтоб импульс света попал на фотодетектор.
За эти 4000 отражений импульса света от зеркал-1-2 чувствительность датчика вырастает в 2000 раз, что эквивалентно увеличению длины плеча датчика LIGO с 4км до 8000км. Аналогично устроено второе 4-километровое плечо датчика LIGO. Множество подобных решений на высоком инженерном уровне позволяют датчику LIGO фиксировать изменение расстояния между зеркалами на 0,0001 диаметра протона.
Астронавигатор ядерных ракет дает навигационную точность 900м: координаты по 2 пересечениям на глобусе 2-х окружностей равной угловой высоты 2-х звезд. Угловая высота это угол «вертикаль наблюдателя – направление на выбранную звезду в небе». Совокупность точек равных угловых высот на глобусе – окружность. Две звезды – 2 окружности равных угловых высот: пересекаются в 2-х точках, одна из них координаты ракеты, 2-ю отсекают предыдущие координаты.
Гироскоп с электростатическим подвесом (заряжаемый электронно-лучевой пушкой вращающийся шар в полусферических обкладках с отрицательным потенциалом) в подлодках дает в конце кругосветного путешествия навигационную точность 900м.
Самым точный гироскоп – волоконно-оптический гироскоп: катушка с оптоволокном. По оптоволокну в катушке через полупрозрачное зеркало (продольные оси волокон направлены под углом 45° к плоскости зеркала) пропускают в встречных направлениях непрерывное одночастотное (когерентное) лазерные лучи. При вращении в оси перпендикулярной катушке на выходе зеркал луч идущий по вращению катушки увеличит частоту, луч идущий в противоположном направлении уменьшит частоту из-за эффекта Доплера. Угловая скорость – по биениям частот. Встречные лучи выводят через полупрозрачное зеркало (продольные оси волокон направлены под углом 45° к плоскости зеркала) в фотоприемник. Оба луча в виде разнесенных параллельных лучей, дают из-за сферической формы двух волн падающих на плоскую поверхность, интерференционные полосы на линейном многопиксельном фотоприемнике. При изменении частоты биений интерференционные полосы двигаются вдоль фотоприемника. Фотоприемник превращает движение интерференционных полос в выходной электрический сигнал гироскопа.
Самый дорогой датчик: нейтринный телескоп. Самый дорогой мобильный датчик: космический телескоп «Джеймс Уэбб».
Самый низкочастотный радиодатчик: приемно-передающие антенны радиоволн звуковых частот для связи с подлодками на глубине 60м (передача буквы за 20мин несколькими частотами) имеют высоту центральных опор 305м.
Антенна радиоволн звуковых частот подлодки: разматываемый с катушки на 1000м кабель из десятков изолированных позолоченных синтетических волокон. Кабель соединен с электрическим (виртуальным) удлинителем антенны (виртуальный четвертьволновой вибратор: электрическое удлинение антенны резонансной индуктивностью, накапливающей энергию нарастающей четверти периода несущей частоты). В кабеле через каждые 40см микрофоны (фазированная микрофонная решетка) обнаружения подлодок, кораблей. В кабеле каждые 3м магнитометры обнаружения подлодок.
Для связи с подлодкой на глубине 30м самолет Ту-142МР разворачивает в полете трос-антенну СДВ-диапазона длиной 8600м.
Биодатчики:
У человека 12 органов чувств – 12 биодатчиков:
1. зрение. Глаз человека имеет 137 млн светочувствительных клеток (7млн для цветного зрения).
2. слух (уши)
3. вкус (язык)
4. голод-насыщение
5. обоняние (нос)
6. осязание (кожа). В подушечке каждого пальца руки 3000 датчиков осязания с разрешением 1мм. На теле человека 1млн датчиков осязания
7. датчик температуры
8. датчик влажности кожи (датчик теплового потока)
9. вестибулярный аппарат (датчик угла наклона, датчик ускорения).
10. пропорциональный датчик удлинения мышцы
11. пропорциональный датчик силы мышцы
12. датчик времени
1-е цифровые датчики появились в 1960-х как источник сигнала цифровых борткомпьютеров ядерных ракет. 1969г: в СССР получили радиотелеметрию с 13600 датчиков лунной ракеты Н-1.
Понятие «Датчик» привязано к выходному сигналу: в конструкцию датчика, неотделимого от других структур, в принципе не входит всё, что при удалении не меняет сигнал датчика.
Датчики неотделимые от других структур:
1. в автоматическом клиноременном центробежном вариаторе центробежные грузы это: датчики оборотов входного вала, усилитель сигнала, привод шкивами меняющий передаточное число. Датчик неотделим от усилителя и привода
2. в ракетах «Сайдуиндер» в подшипниках внутри управляемых аэродинамических плоскостей ракеты турбины-маховики: роллероны. Встречный поток воздуха раскручивает турбины-маховики в сотни об/сек. Гиромомент маховиков держит постоянной ориентацию осей маховиков, поворотом стабилизаторов выполняя угловую 3D-стабилизацию ракеты: не > 1рад/сек. Датчик неотделим от усилителя, привода
3. вертолета гиростабилизатор работает механически от соединенных с вращающимся кольцом автомата перекоса 2-х рычагов с грузами: датчик неотделим от усилителя и привода
4. в электромоторах коллектор это усилитель, датчик: неотделимы от усилителя, в бесколлекторных моторах они разделены
ПРОПОРЦИОНАЛЬНЫЙ ДАТЧИК СИЛЫ (МОМЕНТА, ДАВЛЕНИЯ) – датчик силы (момента, давления) дающий минимум двухбитный (4 уровня силы для определения скорости изменения силы в быстродействующих системах) выходной сигнал, пропорциональный силе (моменту, давлению) на входе.
В разных приложениях необходимо разное число бит выходного сигнала. В силовой (силомоментной) обратной связи число бит выходного сигнала датчика в разы больше, чем в тактильной обратной связи. В силовой (силомоментной) обратной связи датчик силы (момента, давления) не имеет пикселей (одномерный выходной сигнал). В тактильной обратной связи датчик силы (момента, давления) имеет число пикселей от трех до нескольких миллионов (табличный датчик: многомерный выходной сигнал). В тактильной обратной связи датчик силы может определять не только величину силы, но и (иногда) её 3D-вектор.
По методу получения сигнала пропорциональные датчики силы делят на:
1. датчик на потенциометре с возвратной пружиной
2. датчик электромагнитный с возвратной пружиной
3. тензодатчик проводниковый. Изменение длины напечатанного в виде длинной спирали проводника, меняет его сопротивление, что дает выходной сигнал.
4. тензодатчик проводниковый интерференционный. Работает на принципе сложения частоты опорного генератора и этой же частоты прошедшей через напечатанный в виде спирали проводник. При отсутствии силы в датчике частота опорного генератора и частота прошедшая через растягиваемый проводник настроены в противофазе, давая в выходном сигнале датчика нулевые напряжение, ток. Приложение силы к датчику увеличивает длину проводника, сдвигая фазу частоты на выходе проводника. Сдвиг фазы нарушает режим противофазы, давая выходной сигнал. Чем больше сдвиг фазы, тем больше выходной сигнал.
5. тензодатчик оптоволоконный. Работает на интерференции (сложении волн) опорной частоты монохроматического (одночастотного) лазера и этой же частоты прошедшей через отрезок оптоволокна вклеенного в деталь. Один из торцов отрезка оптоволокна имеет зеркальное покрытие для отражения частоты лазера. При отсутствии силы в датчике, частота опорного генератора и частота прошедшая через растягиваемый отрезок оптоволокна настроены в противофазе, давая в выходном сигнале датчика нулевые напряжение, ток. Приложение силы к датчику увеличивает длину отрезка оптоволокна, сдвигая на его выходе фазу частоты относительно опорной частоты лазера. Сдвиг фазы нарушает режим противофазы, давая выходной сигнал. Чем больше сдвиг фазы, тем больше выходной сигнал и сила тока в фотоэлементе, в котором происходит сложение фаз обоих частот.
Пропорциональный датчик силы (момента, давления) используют в:
1. в экспериментальных компьютерных планшетах
2. в графических планшетах
3. в роботах, в костюмах телеприсутствия, в экзоскелетах в качестве элемента тактильной или силовой (силомоментной) обратной связи.
4. в педали газа автомобиля в системе электронной дроссельной заслонки
5. в педали тормоза автомобиля в системе электронных тормозов
6. в аэродинамических элементах (элероны, элевоны) управления некоторых самолетов для силовой обратной связи в электродистанционной системе управления самолетом. Эта система передает рукам летчика (через ручки управления самолетом) масштаб сил в аэродинамических элементах самолета.
7. в экспериментальных экскаваторах с силовой (силомоментной) обратной связью «ковш – человек-оператор». При выемке смешанных материалов – большие камни, залитые илом или глиной – оператор чувствует, обходит камни.
Для роботов, костюмов телеприсутствия, костюмов виртуальной реальности и экзоскелетов более подходят тензодатчики силы: минимальное перемещение элементов датчика при измерении силы уменьшает задержку управления в системе обратной связи.
Применение датчиков силы (момента, давления) ограничено ускорениями (включая угловые ускорения) изделия, в котором их применяют. Если ускорение изделия с датчиками превышает 3g – обычно нужен механизм (рычажный с противовесом) разгрузки от инерционных сил измерительного элемента датчика. Если измеряется непосредственно сила инерции, тогда начиная с ускорения ~5g и выше используют датчики ускорения (акселерометры). Они компактнее, точнее измеряют силу инерции.
УПРАВЛЯЮЩИЙ ЭКЗОСКЕЛЕТ – экзоскелет пальца руки, руки или ноги человека, выполняющий следующие функции:
1. в направлении силовой (силомоментной) обратной связи от человека к аватару (от человека к экзоскелету электродистанционному), управляющий экзоскелет выполняет чисто информационную функцию, не участвуя в прямой передаче силового усилия к пальцу руки, к руке, к ноге аватара (к пальцу руки, к руке или к ноге экзоскелета электродистанционного)
2. управляющий экзоскелет силовой (силомоментной) обратной связью передает человеку-оператору (по установленному графику усиления) силы, моменты действующие на палец руки, на руку или на ногу аватара (на палец руки, на руку или на ногу экзоскелета электродистанционного)
В силовой (силомоментной) обратной связи «человек – аватар» управляющий экзоскелет есть только на стороне человека. Варианты аватара:
1. аватар – реальный андроид, управляемый человеком-оператором через силовую обратную связь
2. аватар – человекообразный персонаж виртуальной реальности, управляемый человеком-оператором через силовую обратную связь. Силы идущие на управляющий экзоскелет человека-оператора с окружающей аватара виртуальной средой, генерирует софт виртуальной реальности
В силовой (силомоментной) обратной связи «управляющий экзоскелет человека-оператора – силовой орган экзоскелета электродистанционного» управляющий экзоскелет присутствует только на конечностях человека-оператора.
Все виды обратной связи, проходящие через управляющий экзоскелет в обоих направлениях, представляют собой частные случаи отрицательной обратной связи.
Основные требования к управляющему экзоскелету:
1. жесткость конструкции для исключения любых движений не содержащихся в сигнале обратной связи
2. отсутствие зазоров, упругих деформаций
3. достаточные быстродействие, силовые (силомоментные) параметры
СИЛОВАЯ (СИЛОМОМЕНТНАЯ) ОБРАТНАЯ СВЯЗЬ – передача сигналом силовой обратной связи копирующему приводу уровня силы (давления, момента) по линии связи. Передача уровня силы (давления, момента) может быть выполнена:
1. по проводам
2. по оптоволокну
3. через модулируемые электромагнитные волны
4. через модулируемые звуковые, ультразвуковые, гиперзвуковые волны
5. через модулируемое нейтронное излучение
6. через другие формы передачи сигнала через пространство
Силовая (силомоментная) обратная связь в быстродействующих копирующих манипуляторах передает в обе стороны 4 цифры: угол, угловая скорость, сила, скорость изменения силы. Пропорциональные датчики силы, угла плавно меняют выходной сигнал пропорционально входному действию.
Разность углов управляющего и исполнительного манипуляторов дает знак перемещения привода. По знаку Канал силы уравнивает цифры датчиков, двигая тот привод где меньше сила.
Без пропорциональных датчиков силы двухсторонняя отрицательная обратная связь работает, но больше расход энергии, амплитуда паразитных колебаний: совпали углы – сила прижима (захвата) резко колеблется 0-100%.
Чем больше скорость изменения силы, тем больше коэффициент дополнительного усиления для уменьшения задержки управления.
Чем больше скорость изменения силы, угловая скорость, тем больше может быть частота опроса датчиков угла, силы для уменьшения задержки управления.
Чем больше величина силы или скорость её изменения, тем больше софт увеличивает диапазон рассогласования (несовпадения) углов обратной связи для уменьшения задержки управления.
Диапазон рассогласования углов обратной связи мал – исполнительный механизм точнее. Диапазон рассогласования углов больше – исполнительный механизм быстрее, сильнее.
Софт силовой (силомоментной) обратной связи ставит диапазон рассогласования углов в зависимости от величины силы (скорости её изменения) по оптимальному балансу «точность – мощность».
Силовую (силомоментную) обратную связь по типу управления делят на:
1. однодатчиковая силовая (силомоментная) обратная связь: привод держит постоянной силу датчика-1 силы управляющего манипулятора. Переход силы за верхний или нижний порог датчика-1 включает привод управляющего и исполнительного манипуляторов. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения управляющего манипулятора короткоходная пружина
2. двухдатчиковая силовая (силомоментная) обратная связь: превышение порога разности сил датчиков сгибания и разгибания управляющего манипулятора включает привод. Обратный переход порога выключает привод
Скорость привода в силовой (силомоментной) обратной связи прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
У силовой (силомоментной) обратной связи обычно линейная зависимость между входным, выходным сигналами. Но встречается и прогрессивное усиление. При квадратичном усилении при росте веса груза вдвое, усиление растет в 4 раза. Это позволяет например человеку в экзоскелете поднимать грузы многократно превышающие возможности его мышц.
Силовую (силомоментную) обратную связь применяют в:
1. в авиации для управления аэродинамическими элементами самолета с передачей (по программному графику коэффициента усиления) сил сопротивления воздуха в руки летчика
2. в системе «костюм телеприсутствия – аватар-андроид»
3. в системе «костюм виртуальной реальности – аватар виртуальной реальности»
4. в электродистанционном экзоскелете для связи по проводам между руками, ногами экзоскелета и руками, ногами человека в экзоскелете
5. в экспериментальных экскаваторах с передачей сил сопротивления ковшу человеку-оператору экскаватора.
Силовая (силомоментная) обратная связь не требует применения компьютера, буферизации сигнала. Наименьшую задержку управления силовой (силомоментной) обратной связью через интернет дает бессерверная обратная связь
Силовую (силомоментную) обратную связь от тактильной обратной связи отличает:
1. тактильная обратная связь – это следящий привод с сверхкоротким ходом до 1-2мм. Силовая (силомоментная) обратная связь – это следящий привод, длина хода которого ограничена только длиной манипулятора, рук, ног
2. силовая (силомоментная) обратная связь приложена к конечности, к суставу человека (к рычажным конструкциям и шарниру аватара или других объектов управления) не только силой, но и моментом. Силовая (силомоментная) обратная связь имеет моментную составляющую, нет деления на пиксели. Тактильная обратная связь не имеет моментную составляющую (пиксели передают вектор силы, не момент), есть деление на пиксели
3. битность сигнала силовой (силомоментной) обратной связи в разы больше, чем в тактильной обратной связи
4. полный трафик всех каналов (силы, углы) силовой (силомоментной) обратной связи не > 10Кб/сек. Полный трафик всех каналов полнофункциональной тактильной обратной связи аватара с человеком – мегабайты в секунду
5. в силовой (силомоментной) обратной связи сумма сил в датчиках конечностей аватара равна сумме сил действующих на шарниры аватара. В тактильной обратной связи сумма сил в датчиках может многократно (гидростатическое давление на аватара под водой) превышать сумму сил действующих на шарниры аватара
6. силовая (силомоментная) обратная связь передает точную цифру силы с учетом коэффициента усиления. Тактильная обратная связь иногда передает цифру силы без изменения (вибрационные технологии)
В силовой (силомоментной) обратной связи могут быть вместо датчика силы использованы тактильные датчики.
Силовую (силомоментную) обратную связь делят на:
1. активная силовая (силомоментная) обратная связь: отрицательная обратная связь между приводами пары объектов. Управляющий объект пары тот, чей сигнал мощнее
2. пассивная силовая (силомоментная) обратная связь: сигнал отрицательной обратной связи заменяют пружины, возвращающие один с пары объектов в нулевое (стартовое) положение
ТАКТИЛЬНАЯ ОБРАТНАЯ СВЯЗЬ – передача по цифровой линии связи сканируемого с каждой точки поверхности аватара через экзоскелетный интерфейс на аналогичный участок кожи человека действия:
1. силы (давления) на кожу человека. Уровни силы (давления) передает на кожу человека матрица пропорциональных датчиков силы (давления) – тактильная матрица давления
2. температуры на кожу человека. Температуру на кожу человека передает матрица датчиков температуры – тактильная матрица температуры
3. теплового потока на кожу человека. Тепловой поток на кожу человека передает матрица датчиков теплового потока – тактильная матрица теплового потока. Действие на кожу человека тактильной матрицы теплового потока отличается от действия на кожу человека тактильной матрицы температуры тем, что позволяет человеку на ощупь отличить теплопроводный материал (металл, вода…) от нетеплопроводного материала (дерево…). Металл не меняет своей температуры после контакта с кожей, тогда как например дерево после контакта с кожей быстро нагревается. По скорости нагрева кожи, по цифре теплового потока и его знаку (направление потока) мозг человека различает метал от пластмассы, пластмассу от дерева. Тактильная матрица датчиков температуры может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека. При температурах близких к температуре тела человека или выше её, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Тактильную обратную связь от силовой (силомоментной) обратной связи отличает:
1. тактильная обратная связь – это следящий привод с сверхкоротким ходом до 1-2мм. Силовая (силомоментная) обратная связь – это следящий привод, длина хода которого ограничена только длиной манипулятора, рук, ног
2. силовая (силомоментная) обратная связь приложена к конечности, к суставу человека (к рычажным конструкциям и шарниру аватара или других объектов управления) не только силой, но и моментом. Силовая (силомоментная) обратная связь имеет моментную составляющую, нет деления на пиксели. Тактильная обратная связь не имеет моментную составляющую (пиксели передают вектор силы, не момент), есть деление на пиксели
3. битность сигнала силовой (силомоментной) обратной связи в разы больше, чем в тактильной обратной связи
4. полный трафик всех каналов (силы, углы) силовой (силомоментной) обратной связи не > 10Кб/сек. Полный трафик всех каналов полнофункциональной тактильной обратной связи аватара с человеком – мегабайты в секунду
5. в силовой (силомоментной) обратной связи сумма сил в датчиках конечностей аватара равна сумме сил действующих на шарниры аватара. В тактильной обратной связи сумма сил в датчиках силы (давления) может многократно (гидростатическое давление на аватара под водой) превышать сумму сил действующих на шарниры аватара
6. тактильная обратная связь иногда передает цифру силы без изменения (вибрационные технологии). Силовая обратная связь передает точную цифру силы с учетом коэффициента усиления.
Тактильные датчики могут быть использованы вместо датчиков силы в силовой (силомоментной) обратной связи
В тактильной обратной связи тактильные матрицы делят на:
1. матрицы-передатчики – стоят на поверхности аватара
2. матрицы-приемники (тактильные симуляторы) – стоят в экзоскелетном интерфейсе человека (в другом виде тактильного интерфейса). Например в костюме телеприсутствия, в костюме виртуальной реальности.
Элемент тактильной матрицы – тактильный пиксель. Тактильная обратная связь может быть однобитной (у пикселя только 2 состояния: включено – выключено), мультибитной (пропорциональной). Тактильная обратная связь обеспечивает (повторяемость графика давления в следующих по движению тактильных пикселях) функцию «чувство скольжения пальцев по материалу», если задержка управления пикселями-приемниками (и пикселями-передатчиками) не > 0,1сек (10Hz альфа-ритм мозга: средняя частота опроса мозгом биологических датчиков пропорционального удлинения и силы мышц) и используют многобитные (пропорциональные) тактильные пиксели.
Варианты аватара в тактильной обратной связи:
1. аватар – реальный андроид с тактильной матрицей на всей или части его поверхности
2. аватар – человекообразный персонаж виртуальной реальности с функцией тактильной матрицы (виртуальная кожа) на всей или части его поверхности
Тактильные матрицы (реальные или виртуальные, матрицы-приемники вместе с матрицами-передатчиками) вместе с цифровой двухсторонней тактильной отрицательной обратной связью через экзоскелетный интерфейс действуют на кожу человека.
Тактильную обратную связь делят на:
1. полнофункциональную тактильную обратную связь «аватар – человек». На практике пока не реализовано
2. неполную (частичную) тактильную обратную связь. Например тактильная обратная связь на тыльную часть ладони или на кончики пальцев. Есть примеры практической реализации
Роль тактильного пикселя в тактильной матрице-приемнике может выполнить пьезоэлемент (сила, температура), магнитострикционный (сила, температура) элемент или воздушное сопло (сила, температура, тепловой поток) с быстродействующим электроклапаном.
Наименьшее время задержки тактильной обратной связи через интернет дает бессерверная обратная связь.
ТАКТИЛЬНЫЙ ИНТЕРНЕТ – виртуальная среда передающая тактильные ощущения через интернет. Тактильный интернет часть цифровой экономики. В тактильный интернет входит телеробототехника (телеприсутствие, телехирургия...). Тактильный интернет делят на:
1. Ведущий домен – человек-оператор и интерфейс в роли которого экзоскелет, тактильная перчатка.... При взаимодействии между собой пользователей в костюмах телеприсутствия оба домена (ведущий домен, ведомый домен) ведущие
2. Ведомый домен – управляемый робот (аватар) или его аналог (аватар виртуальной среды) в виртуальной среде
3. Сетевой домен – интернет-сайт связывающий Ведущий, Ведомый домены
Тактильный интернет в полнофункциональной форме – сетевой домен соединяет интернетом костюм телеприсутствия (костюм виртуальной реальности) с аватаром-андроидом (аватаром виртуальной реальности).
При использования в Тактильном интернете костюмов виртуальной реальности с аватарами виртуальной реальности возможно одновременное участие миллиардов интернет-пользователей в роли аватаров Метавселенной в общей для них всех интернет игре типа Звездные войны. Подобные сценарии развития Тактильного интернета приведут к тому, что оборот денег Метавселенных от собственников (Facebook, Microsoft, Epic Game, Pokemon Go, Google...) сетевых доменов Тактильного интернета в разы превысит оборот денег реальной (нецифровой) мировой экономики. Тактильный интернет Метавселенной создаст новые отрасли, профессии, рынки, сферы услуг, навыки.
Идет стандартизация протокола Тактильного интернета чтоб пользователь не меняя интерфейс Тактильного интернета переходил с одной Метавселенной в другую с своей виртуальной частной собственностью. Фон, часть объектов Метавселенной протокол кеширования заранее грузит в компьютер пользователя для экономии трафика, обновляет при изменениях. Функциональность протоколов Тактильного интернета пока сильно ограничена из-за отсутствия коммерческого образца костюма виртуальной реальности с силовой обратной связью.
Протокол Тактильного интернета прогнозом движений человека-оператора на приемной (ведомый домен) стороне уменьшит задержку тактильной обратной связи. Чем больше тактильное разрешение матрицы тактильных пикселей и число её пикселей, тем больше допустимая задержка тактильной обратной связи.
Тактильный интернет включает в себя тактильную обратную связь, силовую (силомоментную) обратную связь, канал звука, канал стереокамер...
Тактильный интернет позволит не выходя из дома при покупке одежды примерить её на своё тело, потрогать руками товар в цифровом супермаркете.
Тактильная обратная связь передает по цифровой линии связи сканируемое с каждой точки поверхности аватара через экзоскелетный интерфейс на аналогичный участок кожи человека действие:
1. силы (давления) на кожу человека. Уровни силы (давления) передает на кожу человека матрица пропорциональных датчиков силы (давления) – тактильная матрица давления
2. температуры на кожу человека. Температуру на кожу человека передает матрица датчиков температуры – тактильная матрица температуры
3. теплового потока на кожу человека. Тепловой поток на кожу человека передает матрица датчиков теплового потока – тактильная матрица теплового потока. Действие на кожу человека тактильной матрицы теплового потока отличается от действия на кожу человека тактильной матрицы температуры тем, что позволяет человеку на ощупь отличить теплопроводный материал (металл, вода…) от нетеплопроводного материала (дерево…). Металл не меняет своей температуры после контакта с кожей, тогда как например дерево после контакта с кожей быстро нагревается. По скорости нагрева кожи, по цифре теплового потока и его знаку (направление потока) мозг человека различает метал от пластмассы, пластмассу от дерева. Тактильная матрица датчиков температуры может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека. При температурах близких к температуре тела человека или выше её, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Средой Тактильного интернета будет мобильная связь 5G и 6G.
ТАКТИЛЬНЫЙ ПИКСЕЛЬ – минимальный по измерительному (приемному) касанию, элемент тактильной матрицы-передатчика (матрицы-приемника).
Тактильный пиксель передает по цифровой линии связи сканируемой им точки поверхности аватара через экзоскелетный интерфейс на аналогичный участок кожи человека действие:
1. силы (давления) на кожу человека: тактильные пиксели силы (давления). При передаче на кожу человека уровней силы (давления) используют матрицу датчиков силы (давления) – тактильная матрица давления
2. температуры на кожу человека: тактильные пиксели температуры. При передаче на кожу человека температуры используют матрицу пропорциональных датчиков температуры – тактильная матрица температуры
3. теплового потока на кожу человека: тактильные пиксели теплового потока
При передаче на кожу человека теплового потока используют матрицу датчиков теплового потока – тактильная матрица теплового потока. Действие на кожу человека тактильной матрицы теплового потока отличается от действия на кожу человека тактильной матрицы температуры тем, что позволяет человеку на ощупь отличить теплопроводный материал (метал, вода…) от нетеплопроводного материала (дерево…). Метал не меняет своей температуры после контакта с кожей, тогда как например дерево после контакта с кожей начинает быстро нагреваться. По скорости нагрева кожи, по цифре теплового потока и его знаку (направление потока) мозг человека различает метал от пластмассы, пластмассу от дерева. Тактильная матрица датчиков температуры может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека. При температурах близких к температуре тела человека или выше её, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Тактильные пиксели силы (давления) делят на:
1. одноосевые тактильные пиксели силы (давления): дают цифру проекции силы в направлении перпендикулярном поверхности тактильной матрицы. Наиболее вероятное (вероятность не 100%) реальное направление трехмерного вектора силы софт определяет по сигналу силовой (силомоментной) обратной связи
2. двухосевые тактильные пиксели силы (давления): дают цифру силы и направление вектора силы в одной плоскости измерения. Наиболее вероятное (вероятность не 100%) реальное направление трехмерного вектора силы софт определяет по сигналу силовой (силомоментной) обратной связи
3. трехосевые тактильные пиксели силы (давления): дают цифру силы и направление вектора силы в трех осях пространства
Тактильный пиксель в тактильной матрице-приемнике получает, от его аналога-пикселя в матрице-передатчике, сигнал многократно усиленный усилителем на стороне матрицы-приемника. Тактильные пиксели силы (давления) могут быть однобитными (пиксель имеет только 2 состояния: включено – выключено), мультибитными (пропорциональными). Тактильные пиксели обеспечивают (повторяемость графика давления в следующих по движению тактильных пикселях) функцию «чувство скольжения пальцев по материалу», если задержка управления тактильными пикселями-приемниками (и пикселями-передатчиками) не > 0,1сек (10Hz альфа-ритм мозга: средняя частота опроса мозгом пропорциональных биодатчиков силы, удлинения мышц) и используют многобитные (пропорциональные) тактильные пиксели.
Тактильные матрицы делят на:
1. матрицы-передатчики – стоят на поверхности аватара
2. матрицы-приемники – стоят в экзоскелетном интерфейсе человека. Например в костюме телеприсутствия, в костюме виртуальной реальности.
Тактильная матрица-приемник может работать как на цифровом, так и аналоговом сигнале тактильных датчиков робота. Цифровой сигнал точнее, аналоговый сигнал более быстродействующий.
Элементом тактильной матрицы является тактильный пиксель.
Тактильные матрицы (реальные или виртуальные, матрицы-приемники вместе с матрицами-передатчиками) вместе с цифровой двухсторонней тактильной отрицательной обратной связью через экзоскелетный интерфейс действуют на кожу человека. Наиболее вероятные сегодня тактильные пиксели температуры это полупроводниковые датчики-передатчики и датчики-приемники.
Роль тактильного пикселя в тактильной матрице-приемнике может выполнить пьезоэлемент (сила, температура), магнитострикционный (сила, температура) элемент или воздушное сопло (сила, температура, тепловой поток) с быстродействующим электроклапаном.
ТАКТИЛЬНЫЙ СИМУЛЯТОР – тактильный пиксель или матрица тактильных пикселей симулирующих на коже человека физическое действие внешней среды на тактильные датчики робота. Физическое воздействие внешней среды на датчики робота это:
1. тактильные пиксели передающие силу (давление)
2. тактильные пиксели передающие температуру
3. тактильные пиксели передающие скорость теплового потока
Тактильные пиксели передающие силу (давление) делят на:
1. тактильные пиксели передающие силу (давление) в направлении перпендикулярном к поверхности пикселя
2. тактильные пиксели передающие силу (давление) по двум каналам в двух осях пространства
3. тактильные пиксели передающие силу (давление) по трем каналам в любом направлении
Тактильные пиксели передающие силу (давление), могут использовать следующие физические эффекты:
1. обратную электровибрацию
2. поток сжатого воздуха, модулируемого клапаном
3. магнитострикционный эффект
4. пьезострикционный эффект
Тактильные пиксели передающие температуру, могут использовать следующие физические эффекты:
1. поток горячего или холодного сжатого воздуха, модулируемого клапаном
2. пьезострикционный эффект
3. магнитострикционный эффект
Тактильные пиксели передающие скорость теплового потока, могут использовать следующие физические эффекты:
1. поток горячего сжатого воздуха, модулируемого клапаном
2. пьезострикционный эффект
3. магнитострикционный эффект
Тактильный симулятор может работать как на цифровом, так и аналоговом сигнале тактильных датчиков робота. Цифровой сигнал точнее, аналоговый сигнал более быстродействующий.
Тактильный симулятор может быть однобитным (пиксель имеет только 2 состояния: включено – выключено), мультибитным (пропорциональным).
МЕТАВСЕЛЕННАЯ – это социальная виртуальная цифровая 3D-инфраструктура с доступом в неё пользователей в образе 3D-аватаров. Контент Метавселенной создают пользователи, софт создают корпорации и отдельные группы программистов. В Метавселенной нет ограничений на количество одновременных пользователей, есть полностью функционирующая экономика. Метавселенная – частичная копия реального мира, где можно покупать и продавать частную собственность (включая недвижимость), предоставлять собственность в аренду, оформлять кредиты. В Метавселенной пользователи глобальным охватом повышают вероятность коммерческой реализации своих талантов.
В Метавселенных будут цифровые платежи, станут возможны виртуальные путешествия во времени. Пользователь будет выбирать эпоху, в которую хочет попасть.
Facebook создает Метавселенную. Microsoft планирует переносить в Метавселенную игры для Xbox. Epic Games превращает в Метавселенную игру Fortnite. Начато сотрудничество Facebook и Microsoft в создании Метавселенной на единой платформе. Метавселенная – площадка реализации предпринимателями своих товаров и услуг, взаимодействия с клиентами.
Технологическая основа Метавселенной – Тактильный интернет. Средство погружения в Метавселенную – тактильный интерфейс. Пока в начале развития коммерчески доступный и наиболее функциональный тактильный интерфейс это шлем виртуальной реальности с тактильными перчатками.
Технология Тактильного интернета это:
1. Ведущий домен – человек-оператор и интерфейс в роли которого экзоскелет, сенсорная перчатка.... В случае взаимодействия между собой пользователей в костюмах телеприсутствия оба домена (ведущий домен, ведомый домен) являются ведущими доменами
2. Ведомый домен – управляемый робот (аватар) или его аналог (аватар виртуальной среды) в виртуальной среде
3. Сетевой домен – интернет-сайт связывающий Ведущий, Ведомый домены. Бессерверная обратная связь обеспечивает минимальную задержку управления аватаром
Тактильный интернет в полнофункциональной форме – сетевой домен соединяет интернетом костюм виртуальной реальности с аватаром виртуальной реальности. В принципе ничто не мешает костюмом виртуальной реальности удаленно выполнять реальную хирургическую операцию, удаленно управлять реальным андроидом. Это ускорит разработки костюмов виртуальной реальности как единственной технологии Тактильного интернета позволяющей получать многомиллиардные ежегодные доходы в будущем.
В Метавселенную вкладывают десятки миллиардов долларов, ожидают многомиллиардные ежегодные доходы в будущем. Очевидно при подобных вложениях стандартным тактильным интерфейсом погружения в Метавселенную в будущем станет полнофункциональный костюм виртуальной реальности, включающий в себя тактильную обратную связь, силовую (силомоментную) обратную связь, канал звука, канал стереокамер...
При использовании для доступа в Метавселенную костюмов виртуальной реальности с аватарами виртуальной реальности возможно одновременное участие миллиардов интернет-пользователей в роли аватаров Метавселенной в общей для них всех интернет-игре типа Звездные войны. Подобные сценарии развития Тактильного интернета приведут к тому, что оборот денег Метавселенных от собственников (Facebook, Microsoft, Epic Game, Pokemon Go, Google...) сетевых доменов Тактильного интернета в разы превысит оборот денег реальной (нецифровой) мировой экономики. Тактильный интернет Метавселенной создаст новые отрасли, профессии, рынки, сферы услуг, навыки.
Идет стандартизация протокола Тактильного интернета, чтоб пользователь не меняя интерфейс Тактильного интернета переходил с одной Метавселенной в другую с своей виртуальной частной собственностью. Фон, часть объектов Метавселенной протокол кеширования заранее грузит в компьютер пользователя для экономии трафика, обновляет при изменениях. Функциональность экспериментальных протоколов Тактильного интернета пока сильно ограничена из-за отсутствия коммерческого образца костюма виртуальной реальности с силовой (силомоментной) обратной связью.
Протокол Тактильного интернета прогнозом движений человека-оператора в приемной (ведомый домен) стороне уменьшит задержку тактильной обратной связи. Чем больше тактильное разрешение матриц тактильных пикселей и число их пикселей, тем больше допустимая задержка тактильной обратной связи.
Тактильный интернет Метавселенной позволит не выходя из дома при покупке одежды примерить её на своё тело, потрогать руками товар в цифровом супермаркете. Средой Тактильного интернета будет мобильная связь 5G и 6G.
ПЕРЧАТКА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ – это в полном смысле экзоперчатка с функциями:
1. силовая отрицательная обратная связь кисти человека с окружающей средой виртуальной реальности или в телеприсутствии
2. угловая отрицательная обратная связь кисти человека с окружающей средой виртуальной реальности или в телеприсутствии
3. тактильная обратная связь кисти человека с объектами виртуальной реальности или в телеприсутствии. Тактильная обратная связь может быть однобитной (пиксель имеет только 2 состояния: включено – выключено), мультибитной (пропорциональной).
Силовой (силомоментной) обратной связи функции:
1. передача в обоих направлениях связи углов пальцев и ориентации перчатки в местной системе координат.
2. передача человеку силовой отдачи от окружающей среды виртуальной реальности или в телеприсутствии. Обеспечивают пропорциональные датчики сил (момента, давления) экзоперчатки
Тактильной обратной связи функции:
1. функция «чувство скольжения пальцев по материалу». Текстуру поверхности можно симулировать электростимуляцией кожи человека
2. функция действия уровней силы (давления) на кожу человека (чувство текстуры поверхности): тактильные пиксели силы (давления). При передаче на кожу человека уровней силы (давления) используют матрицу пропорциональных датчиков силы (давления) – тактильная матрица давления
3. функция действия температуры на кожу человека: тактильные пиксели температуры. При передаче на кожу человека температуры используется матрица пропорциональных датчиков температуры – тактильная матрица температуры
4. функция действия теплового потока на кожу человека: тактильные пиксели теплового потока. При передаче на кожу человека теплового потока используется матрица датчиков теплового потока – тактильная матрица теплового потока. Действие на кожу человека тактильной матрицы теплового потока отличается от действия на кожу человека тактильной матрицы температуры тем, что позволяет человеку на ощупь отличить теплопроводный материал (метал, вода…) от нетеплопроводного материала (дерево…). Метал не меняет своей температуры после контакта с кожей, тогда как например дерево после контакта с кожей начинает быстро нагреваться. По скорости нагрева кожи, по цифре теплового потока и его знаку (направление потока) мозг человека различает метал от пластмассы, пластмассу от дерева. Тактильная матрица датчиков температуры может заменить тактильную матрицу теплового потока при температурах заметно ниже температуры тела человека. При температурах близких к температуре тела человека или выше её, без измерения теплового потока на ощупь материалы не различимы без тактильной матрицы теплового потока.
Экзоперчатки делят на:
1. перчатка захвата движения (сенсорная перчатка). Передает в одном направлении связи ориентацию (пьезогироскоп) ладони и углы пальцев в координатах виртуальной реальности
2. экзоперчатка силовая. Передает:
a)в обоих направлениях связи, в двух координатах векторы сил почти (у человека тоже не все фаланги пальцев имеют привод с мышц) в каждой фаланге пальца
b)в обоих направлениях связи углы пальцев, ориентацию ладони
3. экзоперчатка тактильная. Может передавать:
a)в одном направлении связи, в одной двух или трех координатах вектор силы (мультибитная экзоперчатка) в каждом тактильном пикселе
b)в одном направлении связи температуру в каждом тактильном пикселе (на практике пока не осуществлено)
c)в одном направлении связи тепловой поток и его знак в каждом тактильном пикселе (на практике пока не осуществлено)
d)в одном направлении связи углы пальцев, ориентацию ладони.
4. экзоперчатка тактильно-силовая. Может передавать:
a)в обоих направлениях связи, в двух координатах векторы сил почти (у человека тоже не все фаланги пальцев имеют привод с мышц) в каждой фаланге пальца
b)в обоих направлениях связи углы пальцев, ориентацию ладони.
c)в одном направлении связи, в одной двух или трех координатах вектор силы (мультибитная экзоперчатка) в каждом тактильном пикселе
d)в одном направлении связи температуру в каждом тактильном пикселе (на практике пока не осуществлено)
e)в одном направлении связи тепловой поток и его знак в каждом тактильном пикселе (на практике пока не осуществлено)
ЭКЗОСКЕЛЕТ – робот с следящим приводом, управляемый человеком внутри робота. Человек управляет экзоскелетом:
1. пропорциональными датчики датчиками силы (момента, давления). Человек жмет датчики силы рук, ног: датчики включая привод убегают от человека двигая руками, ногами экзоскелета. Используют пропорциональные (плавно меняют выходной сигнал пропорционально входному действию) датчики короткого (для уменьшения задержки управления экзоскелетом) хода (тензодатчики). Для быстродействия приводов экзоскелет может иметь систему пружин. В системе защиты экзоскелета от падения могут быть пружины. Датчики угла (перемещения) не нужны
2. миодатчиками: слабые биотоки (0,1V на коже; задержка прихода сигнала от мозга 0,1сек) мышц на коже рук, ног электроусилителями (включают приводы) двигают экзоскелет
3. по проводам через управляющие экзоскелеты рук, ног: экзоскелет электродистанционный
4. через нейроинтерфейс. Напряжение сигнала от мозга 0,01V
Экзоскелеты управляемые датчиками силы (момента, давления) делят на:
1. однодатчиковые экзоскелеты: привод держит постоянной силу датчика-1 силы руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина
2. двухдатчиковые экзоскелеты: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод
Скорость привода экзоскелета прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
При управлении экзоскелетом через отдельные управляющие экзоскелеты рук, ног внешняя среда управляет человеком, если его сила в установленном масштабе (от линейки резисторов, конденсаторов, колебательных контуров или графика в софте) меньше сил приводов экзоскелета. Это силовая обратная связь: можно сделать как копирующий манипулятор без сложной электроники, без компьютера. Силовая обратная связь соединяет части-А-В машины 2 каналами связи + 2 привода + 2 датчика угла (перемещения) + 2 датчика силы (момента, давления). Канал-1 разностью углов (перемещений) датчиков частей-А-В найдет знак перемещения привода. По знаку канал-2 уравняет цифры датчиков углов, сил двигая приводом часть машины где меньше сила.
Без датчиков силы силовая обратная связь работает, но больше расход энергии, амплитуда паразитных колебаний; сила захвата, прижима резко колеблется 0-100% при совпадении углов. Электродистанционная обратная связь передает 4 канала: угол (перемещение) + угловая скорость (скорость перемещения) + сила (момент, давление) + скорость изменения силы (скорость изменения момента, давления). Силовую обратную связь называют электродистанционной системой управления: силу (момент, давление), угол (перемещение) передает только линия связи без прямой механической связи. Функции: ограничения, калибровка, самодиагностика, тесты, отключение неисправного канала дублирования…
1-й в мире экзоскелет: Hardiman от General Electric, 1965г. На идею: человек в костюме с копирующими манипуляторами вешает на самолет бомбы, ракеты, навело серийное производство 1944г электродистанционных копирующих манипуляторов: стрелок бомбардировщика B-29 по проводам дистанционно наводил на цель пулемёты. 1960г: идею инженеры General Electric воплощали в 1-ом в мире экзоскелете Hardiman (1965г: 18 степеней свободы рук, ног) для авианосцев, подводных работ, атомных электростанций, Космоса. С силой человека 4,5кг рука Hardiman поднимала 110кг (1965г), потом 340кг при весе руки с гидронасосом 680кг. 1971г: проект закрыт: чрезмерны задержки, вибрации приводов, вес.
1-й работоспособный экзоскелет XOS (конструктор Стивен Якобсен) создала (грант DARPA от 2000г) фирма Sarcos: известна робот-динозаврами для съемок фильма «Парк Юрского периода». 2007г: Sarcos + экзоскелет XOS купила корпорация Raytheon.
Приводы японских (HAL-5) экзоскелетов скопированы у андроида Honda Asimo (Asimo прыгает с аккумулятором на 1 ноге): электромотор-маховик постоянного вращения крутит 2 магнитореологические муфты сцепления. Магнитореологическая муфта сцепления-1 включает волновый редуктор-1. Магнитореологическая муфта сцепления-2 включает волновый редуктор-2. Шкив выходного вала редуктор-1 тянет трос сгибателя руки (ноги) экзоскелета. Шкив выходного вала редуктор-2 тянет трос разгибателя руки (ноги) экзоскелета. Муфты работают в постоянной малой противофазе управляемой компьютером для постоянной (автомат стабилизации силы в тросе) компенсации упругих деформаций экзоскелета, всех зазоров привода: задержка управления (0,02сек) в разы меньше гидропривода, на 50% экономичнее.
Волновые редукторы (КПД=82 %) шумны, дороги, недолговечны – ожидается переход на дешевый бесшумный долговечный привод «винт – гайка скольжения», который втрое легче волнового редуктора: у гайки нагрузка равномерно распределена на немалую упорную поверхность 3-9 витков резьбы, у волнового редуктора вся многотонная в толчке нагрузка экзоскелета давит на 3-5 точек в зубьях.
Часть разработчиков считает микротурбины лучшим источником энергии военного, грузоподъемного (замена крана, погрузчика в помещениях с низким потолком), спасательного, пожарного… экзоскелетов. Газотурбинный двигатель 1,7 раз легче, вдвое компактнее поршневого равной мощности, 10 раз быстрее запуск в мороз -40°С, в разы надежнее (цифры с танкостроения. С авиастроения более впечатляют), не дает вибрацию на экзоскелет. КПД газотурбинных двигателей выше КПД дизелей в авиа и судостроении. Подводный экзоскелет: микротурбина работающая на гидрореагирующем (окислитель вода как в торпедах) топливе.
В режиме ожидания (работа сетевой информационной системы с датчиками, приводы бесшумной наводки оружия, кондиционер, отопитель, стартер…) – вспомогательная микротурбина… энергоисточник.
Экзоскелеты быстро доставят снаряды зениток (ракет, зениток) на крышах по лестницам многоэтажных зданий. В городских боях экзоскелет способен нести броню (рикошетные пули, осколки, отраженные ударные волны), тяжелые пулеметы, боезапас.
Реализм ощущений человека, безопасность окружающим дает малое усиление в работе экзоскелета с небольшим весом. Больше груз – больше усиление. После марш-броска 60км с максимумом усиления солдат в экзоскелете идет в бой неуставшим.
С 2010г в продаже 1-й в мире коммерческий экзоскелет «HAL-5»: работает 2,5ч, вес 23кг, поднимает руками 40кг, ногами 80кг, конструктор Есиюки Санкаи.
«HAL» 1-й в мире бионический экзоскелет: слабые биотоки (0,1-0,7V задержка 0,05сек) мышц на коже рук, ног электроусилителями (включают приводы) двигают экзоскелет. Ожидают экзоскелеты с нейроинтерфейсом: приводы экзоскелета двигают сигналы выходных (для мозга) нервных волокон, выходящих с межпозвоночных отверстий (на уровне плеч, таза) позвоночника. Их снимут бесконтактные (решат проблему отторжения электродов) датчики с усилителями. Инвалиды в седле шагающего экзоскелета получат свободу работы руками, ногами. Сигналы датчиков силы (и тактильные сигналы искусственной кожи протеза кисти в экзоскелете) экзоскелета компьютер переведет в биоформат импульсов мозга инвалида. В компьютере информация о биоформате (тесты генератором импульсов) сигнала каждого нервного волокна, идущего в мозг. Сигналы датчиков экзоскелета в биоформате компьютер направит в нервные волокна рук, ног, входящие в межпозвоночные отверстия (на уровне плеч, таза) позвоночника. Передача сигнала в входные нервные волокна бесконтактно (индуктивная или емкостная наводка параллельным электродом серии СВЧ-импульсов симулирует каждый одиночный импульс в нервном волокне)(крутой передний фронт и пологий задний фронт СВЧ-импульсов или наоборот), решит проблему отторжения электродов.
Интерфейс «нервные волокна – экзоскелет», подключенный к компьютеру экзоскелета инвалида, обеспечит требуемую физиологией (безопасное пользование экзоскелетом без обучения) человека задержку управления экзоскелетом не > 0,1сек, определяемую средней частотой (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков удлинения и силы мышц человека 10Hz.
Экзоскелет инвалида с НИИ «Институт живых систем» Нижегородского государственного университета им. Н. И. Лобачевского: разработчики планируют создать управление сигналами (углы, угловая скорость, векторы, перемещения) гироскопа на спине: наклон туловища вперед увеличит длину шага; наклон вбок переместит центр масс вбок от точек опоры ступней; поворот туловища от вертикали управляет фазой, ускорением, длиной шага.
Экзоскелет возможно интегрировать в скафандр: работа космонавтов на планетах высокой гравитации: без приводов экзоскелета человек физически не тянет вес тела, скафандра, системы жизнеобеспечения, радиационной защиты. Смертельную дозу радиации в скафандре космонавт наберет от космических лучей за 200ч, от солнечной бури за минуты. Экзоскелет можно защитить от космических лучей, солнечных бурь, от нейтронов, от рентгеновского и гамма излучений термоядерных взрывов так, как защищают от радиации близких атомных взрывов борткомпьютеры ядерных ракет: покрытие сплава изотопов металлов гадолиний-157Gd, эрбий-167Er.
В скафандре расход энергии человеком (КПД=25%) 4 раза больше при 10-кратном уменьшении скорости работы. Экзоскелет в скафандре в 4 раза снизит расход энергии космонавтом, в 10 раз (с экзоперчаткой) увеличит скорость работы.
Энергию приводов экзоскелет-скафандра обеспечит по электрический, оптический (100кВт по 1кв/мм оптоволокна) кабель или маховик-гиродин с солнечными батареями. Мобильная версия: аккумулятор, топливный элемент, жидкое топливо. Проблемы интеграции экзоскелета с скафандром, защиты от опасной внешней среды, управления огромными (меха) экзоскелетами решит экзоскелет электродистанционный (электродистанционный интерфейс): в нём прямая механическая передача силы, угла, момента на руки, ноги экзоскелета заменена передачей по проводам, по оптоволокну (по радио, по оптическому, инфракрасному, ультрафиолетовому, рентгеновскому, терагерцовому каналу, по гамма-лучам, по гиперзвуковому каналу через стенку, по нейтронному, по нейтринному, по мюонному каналу, по протонному или ионному каналу в вакууме…).
В герметичном отсеке экзоскелета электродистанционного экзоскелеты рук, ног человека соединены с экзоскелетом разъемом: хватит 2 провода на обратную связь, энергоподачу. Нет механических уплотнений движущихся деталей, нет гермосоединений трубопроводов. Космонавт, водолаз входит в гермоотсек, сервопривод герметизирует двери шлюза, экзоскелета, электрозамками отсоединит экзоскелет от шлюза, работает в экзоскелете в шлеме кругового обзора. После работы стыковка в обратном порядке.
Гермоотсек экзоскелета электродистанционного защитит космонавта от вакуума, от плотных горячих атмосфер планет типа Венеры; от давления жидкой среды типа океана (фары, погружение сквозь лед с горячим радиоизотопным или атомным реактором внизу на трос-кабеле) Европы (спутник Юпитера); пожарного, спасателя от горячей, ядовитой внешней среды горящих химических, атомных предприятий; водолаза от давления неограниченных глубин океана; солдата от отравляющих газов, радиоактивной внешней среды…
Экзоскелет электродистанционный с гермоотсеком (запас кислорода, поглотитель углекислоты) даст шахтерам шанс выжить в взрыве метана, обвале. Ожидают превышения оборота рынка экзоскелетов электродистанционных над суммарным рынком остальных видов мобильных экзоскелетов из-за их ограничений функциональности.
Экзоскелет как средство телеуправления андроидом рассматривают госпрограммы освоения дна океана принятые в Японии, России. На дне 5,6км Тихого океана Япония найдя месторождения редкоземельных металлов в 1000 раз больше разведанных мировых запасов, приняла госпрограмму освоения ресурсов морского дна: редкоземельные металлы, гидрат метана, нефть, газ. Арктика это 30% мировых запасов нефти, газа: в Карском море 13млрд т нефти.
Домашний экзоскелет как средство телеуправления андроидом (костюм телеприсутствия) по криптозащищенной интернет-линии, позволит рабочим, инженерам из дома работать аватар-андроидом подводных предприятий Северного ледовитого океана. Андроид подводного предприятия работает 24ч в сутки. Передача управления с костюма-1 телеприсутствия (человек-оператор-1) к костюму-2 телеприсутствия (оператор-2): оператор-2 примет работу в режиме односторонней (от андроида) обратной связи. В костюме-1 телеприсутствия усиление в направлении «человек – андроид» уменьшается до нуля (сигнализация + процент усиления в экране шлема). В костюме-2 телеприсутствия усиление растет до 100% (сигнализация + процент усиления в экране шлема).
Экзоскелет как средство телеуправления андроидом применим как костюм виртуальной реальности. Рыночный потенциал домашнего экзоскелета (в 3D-кардане с приводами + датчик угла в каждой оси + датчик угла наклона на спине) как костюма виртуальной реальности многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор), рекламных сайтов в 10000 раз превысит рыночный потенциал экзоскелета как транспортного, грузоподъемного средства. Мировой рыночный потенциал домашнего экзоскелета как костюма виртуальной реальности, как средства управления аватаром виртуальной реальности многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор), рекламных сайтов обещает превысить мировой рыночный потенциал автомобиля (60% мировой промышленности: подрядчики, субподрядчики).
Сложные части экзоскелета как средства телеуправления андроидом – приводы, экзоперчатка с силовой обратной связью с кистью руки экзоскелета или с кистью руки андроида. Эту технологию 2012г демонстрировала фирма Festo: человек экзоперчаткой силовой обратной связью по проводам управлял кистью руки робота. Экзоперчатка НПО «Андроидная Техника» управляет кистью андроида силовой обратной связью по радио.
Главная проблема разработчиков экзоскелетов – задержка управления (время отклика) приводом решена в андроиде Хонда Азимо: маховик (ротор электромотора на постоянных максимальных оборотах) + магнитореологическая муфта сцепления + редуктор. Магнитореологическая муфта сцепления андроида Азимо соединяет маховик с редуктором за 0,02сек, что соответствует техусловиям безопасного управления экзоскелетом, определяемыми физиологией человека. Требуемую физиологией (безопасное пользование без обучения) человека задержку управления экзоскелетом не > 0,1сек определяет средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Hz.
Для реверсивных машин (экзоскелет) задержка управления это половина времени цикла «разгон – торможение – реверсивный разгон – торможение» с учетом упругих деформаций, люфтов.
ЭКЗОСКЕЛЕТ ЭЛЕКТРОДИСТАНЦИОННЫЙ – экзоскелет с электродистанционным (копирующая отрицательная обратная связь по проводам, по оптоволокну, по радио, по оптическому, инфракрасному, ультрафиолетовому, рентгеновскому, терагерцовому каналу, по гамма-лучам, по гиперзвуковому каналу через стенку, по нейтронному, по нейтринному, по мюонному каналу, по протонному или ионному каналу в вакууме…) интерфейсом: управление без прямой механической связи человека с руками, ногами экзоскелета. Человек механически управляет только управляющими экзоскелетами своих рук, ног, шарнирно соединенных с внешним каркасом. Экзоскелеты рук, ног по проводам или оптоволокну силовой обратной связью передают углы, силы приводам рук, ног экзоскелета и обратно.
Пропорциональный (датчик плавно меняет выходной сигнал пропорционально входному действию) датчики силы, угла: в экзоскелетах рук, ног человека, в приводах рук, ног экзоскелета. Пропорциональные датчики силы имеют короткий ход (тензодатчики) для уменьшения задержки управления экзоскелетом. Пропорциональный датчик силы: бесконтактный тензодатчик, оптоволоконный датчик, магнитный датчик, электростатический датчик, ультразвуковой датчик…
Человек жмет пропорциональные датчики силы (момента, давления) экзоскелета руки (ноги): датчики включая привод убегают от человека, по электропроводам двигая приводом на такой же угол руку (ногу) экзоскелета. Приводами экзоскелета внешняя среда управляет человеком, если его сила в установленном масштабе (от линейки резисторов, конденсаторов, колебательных контуров или графика в софте) меньше сил приводов экзоскелета. Это силовая обратная связь: можно сделать как копирующий манипулятор без сложной электроники, без компьютера.
Силовая обратная связь соединяет части-А-В машины 2 каналами связи + 2 привода (актуатора) + 2 датчика угла (перемещения) + 2 датчика силы (момента, давления). Канал-1 разностью углов (перемещений) датчиков частей-А-В найдет знак перемещения привода. По знаку канал-2 уравняет цифры датчиков углов, сил двигая приводом часть машины, где меньше сила. Без датчиков силы силовая обратная связь работает, но больше расход энергии, амплитуда паразитных колебаний; сила захвата, прижима резко колеблется 0-100 % при совпадении углов.
Обратная связь передает 4 канала: угол (перемещение) + угловая скорость (скорость перемещения) + сила (момент, давление) + скорость изменения силы (скорость изменения момента, давления).
Силовую обратную связь называют электродистанционной системой управления. В списке функций: ограничения, калибровка, самодиагностика, тесты, отключение неисправного канала дублирования…
Экзоскелеты управляемые датчиками силы (момента, давления) делят на:
1. однодатчиковые экзоскелеты: привод держит постоянной силу управляющего датчика-1 силы руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина
2. двухдатчиковые экзоскелеты: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод
Скорость привода экзоскелета прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
В гермоотсеке экзоскелета электродистанционного экзоскелеты рук, ног человека соединены с исполнительным экзоскелетом разъемом кабеля: хватит 2 провода на обратную связь, энергоподачу. Нет механических уплотнений движущихся деталей, нет гермосоединений трубопроводов. Космонавт, водолаз через шлюз входит в гермоотсек, сервопривод герметизирует двери шлюза, экзоскелета, электрозамки отсоединят экзоскелет от шлюза, работа в экзоскелете в шлеме кругового обзора. Стереокартинку, векторы звуков передают сферический экран шлема, многоканальная акустическая система шлема. После работы стыковка в обратном порядке.
Чтоб не гнать обратной связью 150кадр/сек из-за задержки «наклон головы – смена картинки» шлем закреплен в зажимной раме туловища. Сферический экран шлема максимального (руки пользователя снаружи экрана чтоб не попали в кадр) диаметра для снижения вероятности головных болей, быстрой утомляемости пользователя от чрезмерного несоответствия (для мозга) расстояния «глаз – объект на экране» реальному расстоянию до этого объекта.
Гермоотсек экзоскелета электродистанционного защитит космонавта от вакуума, от плотных горячих атмосфер планет типа Венеры; от давления жидкой среды типа предполагаемого океана (фары, погружение сквозь лед с горячим радиоизотопным или атомным реактором внизу на длинном трос-кабеле) Европы (спутник Юпитера); пожарного и спасателя от горячей, ядовитой внешней среды горящих химических, атомных предприятий; водолаза от давления неограниченных глубин океана; солдата от отравляющих газов, радиоактивной внешней среды…
Экзоскелет электродистанционный с гермоотсеком (запас кислорода, поглотитель углекислоты) даст шахтеру шанс выжить в взрыве, обвале. В экзоскелете электродистанционном космонавты будут работать на планетах высокой гравитации: без приводов экзоскелета человек физически не тянет (3g) вес тела, скафандра, системы жизнеобеспечения, радиационной защиты. Смертельную дозу радиации в скафандре космонавт наберет от космических лучей за 200ч, от солнечной бури за минуты. Гермоотсек экзоскелета электродистанционного можно защитить от космических лучей, солнечных бурь, от нейтронов, от рентгеновского и гамма излучений термоядерных взрывов так, как защищают от радиации близких атомных взрывов борткомпьютеры ядерных ракет: покрытие сплава изотопов металлов гадолиний-157Gd, эрбий-167Er.
В космическом скафандре расход энергии человеком (его КПД=25%) 4 раза больше при 10-кратном уменьшении скорости работы. Экзоскелет электродистанционный в 4 раза снизит расход энергии космонавтом, в 10 раз (с экзоперчаткой + силовой гироскоп экзоскелета) увеличит скорость работы.
Энергию приводов экзоскелет электродистанционный обеспечат по электрическому или оптокабелю (100кВт по 1кв/мм оптоволокна) или через аккумулятор солнечных батарей.
Часть разработчиков считает микротурбины лучшим энергоисточником военного, грузоподъемного (замена крана, погрузчика в помещениях с низким потолком), спасательного, пожарного… экзоскелетов. Газотурбинный двигатель в 1,7 раз легче, вдвое компактнее поршневого двигателя равной мощности, в 10 раз быстрее запуск в мороз -40°С, в разы надежнее (цифры с танкостроения. Цифры с авиастроения более впечатляют), не дает вибрацию на экзоскелет. КПД газотурбинных двигателей превысил КПД дизелей в авиа и судостроении. В подводных экзоскелетах электродистанционных турбина может работать на гидрореагирующем (окислитель вода как в торпедах) топливе.
В режиме ожидания (работа сетевой информационной системы с датчиками, приводы бесшумной точной наводки оружия, кондиционер, отопитель, стартер) – вспомогательная микротурбина.
Электродистанционный интерфейс с 4-кратным дублированием международными стандартами вытеснил другие виды интерфейса в военных, пассажирских самолетах. Электродистанционный интерфейс внедряет автомобилестроение: электронные педали газа, тормоза. Электродистанционный интерфейс экспериментальных экскаваторов дает человеку чувствовать в работе крупные камни в мягком (влажном) грунте, песке, иле, глине, увеличить производительность, при работе снизить вероятность разрушения городской подземной инфраструктуры, ускорить разрушение экскаватором ветхих зданий.
Реализм ощущений человека-оператора, безопасность окружающим дает малое усиление в работе экзоскелета электродистанционного с небольшим весом. Больше груз – больше усиление: подъем неподъемного человеку груза.
Электродистанционный интерфейс экзоскелета снимет ограничения размеров, силы, скорости экзоскелета, повысит безопасность (фильтры ускорений, углов, угловых скоростей, угловых ускорений, сил, скоростей изменения сил; графики усиления обратной связи) работы оператора. Ожидают многократного превышения оборота рынка экзоскелетов электродистанционных над суммарным рынком остальных видов мобильных экзоскелетов из-за их ограничений грузоподьемности, функциональности.
Домашний экзоскелетный электродистанционный интерфейс как средство телеуправления андроидом (костюм телеприсутствия) по криптозащищенной интернет-линии, позволяет рабочим, инженерам не выходя из дома дистанционно работать андроид-аватаром подводного города (разработка природных ресурсов: нефть, газ, редкоземельные металлы…) в многокилометровой глубине Северного ледовитого океана. Андроид подводного предприятия работает круглосуточно. Передача управления с костюма телеприсутствия-1 (человек-оператор-1) к костюму телеприсутствия-2 (человек-оператор-2): оператор-2 примет работу в режиме односторонней (от андроида) обратной связи. Костюм телеприсутствия-1 (оператор-1): усиление в направлении «оператор – андроид» плавно уменьшится (сигнализация + процентное усиление на экране) до нуля, в костюме телеприсутствия-2 (оператор-2) плавно растет (сигнализация + процентное усиление на экране) до 100 %.
Экзоскелетный электродистанционный интерфейс как средство телеуправления андроидом разрабатывает российская фирма «Андроидная техника». Планируют применить как костюм управления аватаром виртуальной реальности. Рыночный потенциал домашнего экзоскелетного электродистанционного интерфейса (в 3D-кардане с отдельным приводом и датчиком угла в каждой оси, с датчиком угла наклона в спине) как костюма виртуальной реальности в многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор) и рекламных сайтах, в ~10000 раз превысит рыночный потенциал экзоскелета как транспортного, грузоподъемного средства. Мировой рыночный потенциал домашнего экзоскелета, как костюма виртуальной реальности, как средства управления аватаром виртуальной реальности многопользовательских игровых, познавательных, профобразовательных (универсальный симулятор) и рекламных сайтов, обещает многократно превзойти мировой рыночный потенциал автомобиля (60% мировой промышленности: подрядчики, субподрядчики).
Сложные части экзоскелета электродистанционного и экзоскелетного электродистанционного интерфейса как средства телеуправления андроидом – это приводы и экзоперчатка с силовой обратной связью с кистью руки экзоскелета или с кистью руки андроида. Эту технологию в 2012г демонстрировала фирма Festo: человек экзоперчаткой силовой обратной связью по проводам управлял кистью руки робота.
Экзоперчатка фирмы «Андроидная Техника» управляет кистью руки андроида силовой обратной связью по радио или встречными модулированными лазерными лучами.
Главная проблема разработчиков экзоскелетов – задержка управления (время отклика) приводом решена в андроиде Хонда Азимо: маховик (ротор электромотора на постоянных максимальных оборотах) + магнитореологическая муфта сцепления + редуктор. Магнитореологическая муфта сцепления андроида Азимо соединяет маховик с редуктором за 0,02сек, что соответствует техусловиям безопасного управления экзоскелетом, определяемыми физиологией человека. Требуемую физиологией (безопасное пользование без обучения) человека задержку управления экзоскелетом < 0,1сек определяет средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Hz.
Для реверсивных машин (экзоскелет) задержка управления это половина времени цикла «разгон – торможение – реверсивный разгон – торможение» с учетом упругих деформаций, люфтов.
Задержка управления электродистанционным экзоскелетом равна времени задержки приводов управляющего экзоскелета оператора + время отработки движения оператора экзоскелетом.
Общественную потребность в экзоскелете с электродистанционным интерфейсом создало в 1944г серийное производство электродистанционных копирующих манипуляторов: стрелок бомбардировщика B-29 по проводам дистанционно наводил на цель пулеметы. Технология вызвала мысль: человек в костюме с копирующими манипуляторами вешает на самолет бомбы, ракеты.
Экзоскелет электродистанционный иногда называют меха.
КЛАССИФИКАЦИЯ ЭКЗОСКЕЛЕТОВ:
1. инвалидные
2. медицинские (переноска и укладка больных, вынос раненных с поля боя…).
3. военные
4. грузовые
5. спасательные
6. пожарные
7. спортивные…
8. управляющие экзоскелеты
9. экзоскелеты управления аватаром
Экзоскелеты управляемые:
1. через пропорциональные датчики силы (момента, давления). Человек жмет датчики силы рук, ног: датчики включая привод убегают от человека двигая руками, ногами экзоскелета. Используют пропорциональные (плавно меняют выходной сигнал пропорционально входному действию) датчики короткого (для уменьшения задержки управления экзоскелетом) хода (тензодатчики). Для быстродействия приводов экзоскелет может иметь систему пружин. В системе защиты экзоскелета от падения могут быть пружины. Датчики угла (перемещения) не нужны. Только датчики силы (момента, давления): сила привода экзоскелета пропорциональна приложенной человеком силе
2. через миодатчики: слабые биотоки (0,1V на коже; задержка прихода сигнала от мозга 0,1сек) мышц на коже рук, ног электроусилителями (включают приводы) двигают экзоскелет
3. по проводам через отдельные управляющие экзоскелеты рук, ног: экзоскелет электродистанционный. Южнокорейская фирма Korea Future Technology построила электродистанционный экзоскелет METHOD-1. Силовая обратная связь соединяет части-А-В машины 2 каналами связи + 2 привода (актуатора) + 2 датчика угла (перемещения) + 2 датчика силы (момента, давления). Канал-1 разностью углов (перемещений) датчиков частей-А-В найдет знак перемещения привода. По знаку канал-2 уравняет цифры датчиков углов, сил двигая приводом часть машины, где меньше сила. Без датчиков силы силовая обратная связь работает, но больше расход энергии, амплитуда паразитных колебаний; сила захвата, прижима резко колеблется 0-100% при совпадении углов. Обратная связь передает 4 канала: угол (перемещение) + угловая скорость (скорость перемещения) + сила (момент, давление) + скорость изменения силы (скорость изменения момента, давления)
4. через нейроинтерфейс. Напряжение сигнала от мозга 0,01V, задержка прихода сигнала от мозга 0,1сек
По обратной связи:
1. экзоскелеты с прямой механической силовой обратной связью от внешней среды к человеку
2. экзоскелеты с чисто информационной (провод, оптоволокно или другие виды связи) силовой обратной связью от внешней среды к человеку: электродистанционные экзоскелеты
Экзоскелеты инвалидные:
1. управляемые миодатчиками: слабые биотоки (0,1V на коже; задержка прихода сигнала от мозга 0,1сек) мышц на коже рук, ног электроусилителями (включают приводы) двигают экзоскелет
2. управляемые датчиками силы (момента, давления)
3. управляемые нейроинтерфейсом
Экзоскелеты управляемые датчиками силы (момента, давления):
1. однодатчиковые экзоскелеты: привод держит постоянной силу датчика-1 силы руки (ноги). Переход силы за верхний или нижний порог датчика-1 включает привод. Обратный переход порога выключает привод. Вместо датчика-2 для обратного движения руки короткоходная пружина
2. двухдатчиковые экзоскелеты: превышение порога разности сил датчиков сгибания и разгибания руки включает привод. Обратный переход порога выключает привод
Скорость привода экзоскелета прямо пропорциональна:
1. скорости изменения силы
2. величине перехода силы за порог датчика силы
По приводу экзоскелеты:
1. с двигателем внутреннего сгорания (микротурбины, поршневые двигатели…)
2. электрические
3. пневматические
4. гидравлические
По типу рабочего органа привода пневматические и гидравлические экзоскелеты делят на:
1. поршневые
2. лопастные
3. турбинные
4. искусственные мышцы из гибких диагонально-армированных трубок, сокращающихся в длине с подачей давления воздуха.
По энергоисточнику:
1. экзоскелеты на жидком топливе
2. экзоскелеты на электрическом аккумуляторе (супермаховик, химический аккумулятор…).
3. экзоскелеты на тепловом (рабочий орган: поршень, турбина…) аккумуляторе.
4. экзоскелеты на жидком газе (азот, углекислота…).
По типу соединения «двигатель – редуктор»:
1. экзоскелеты с прямым (неуправляемым) соединением двигателя с редуктором или рукой, ногой экзоскелета.
2. экзоскелеты с управляемым (регулируемая муфта сцепления, регулируемый амортизатор) соединением двигателя с редуктором или рукой, ногой экзоскелета.
Тип редуктора привода:
1. экзоскелеты с редуктором на зубчатых колесах (волновые и др.)
2. экзоскелеты с редуктором на основе пары «винт – гайка», «винт – шариковая гайка».
3. экзоскелеты с червячным редуктором
4. экзоскелеты с тросовым редуктором
5. экзоскелеты с кулачковым редуктором
Экзоскелеты электродистанционные имеют герметичный отсек, внутрь которого идут только провода, оптоволокно или другая линия связи. Это намного упрощает их применение в агрессивных, опасных средах.
Экзоскелеты электродистанционные:
1. космические. На практике пока не реализованы
2. глубоководные. На практике пока не реализованы
3. военные. На практике пока не реализованы
4. грузовые. На практике пока не реализованы
5. спортивные. На практике пока не реализованы
ОБРАТНАЯ СВЯЗЬ (РОБОТОТЕХНИКА) – отрицательная обратная связь соединяющая датчики робота с виртуальными (алгоритм софта) или реальными датчиками источника-С сигнала управления роботом через каналы связи, приводы, пропорциональные датчики. Канал-1 разностью цифр датчика робота и датчика источника-С находит знак перемещения привода. По знаку канал-2 уравнивает цифры датчиков, действуя приводами робота.
Если внешняя среда действует на датчик робота сильнее, чем источник-С в противоположном направлении, тогда уравнивание цифр датчиков выполняется подстройкой цифры датчика источника-С под цифру датчика робота. В остальных случаях уравнивание цифр датчиков выполняют приводы робота.
Источники сигнала управления роботом делят на:
1. источник сигнала – экзоскелетный интерфейс, джойстик, другой интерфейс человека-оператора управляющего роботом
2. источник сигнала управления – алгоритм софта
3. супервизорный источник сигнала управления: часть времени роботом управляет человек, другую часть времени софт
Обратную связь в робототехнике делят на:
1. обратная связь по скорости
2. обратная связь по силе (моменту, давлению)
3. тактильная обратная связь
4. позиционная обратная связь (углы, координаты)
5. обратная связь по балансу равновесия робота. Пример: баланс равновесия робота-андроида по датчикам сил его ступней и датчикам ускорения туловища: алгоритм уравнивает цифры датчиков с виртуальной моделью движения.
Обратная связь в робототехнике может быть реализована по следующим каналам связи:
1. по проводам
2. по оптоволокну
3. по радиоканалу
4. по ультразвуковому каналу
5. по терагерцовому каналу
6. по инфракрасному каналу
7. по оптическому каналу
8. по ультрафиолетовому каналу
9. по рентгеновскому каналу
10. по гамма-лучам
11. по нейтронному каналу
12. по нейтринному каналу
13. по мюонному каналу
14. по ионному каналу в вакууме
15. по протонному каналу в вакууме
16. по электронно-лучевому каналу в вакууме
СИЛОВОЕ ТЕЛЕПРИСУТСТВИЕ – управление (интерфейс «человек – робот») аватаром (манипулятором) через двухстороннюю силовую обратную связь, видеосвязь. Видеосвязь может быть дополнена односторонней или двухсторонней акустической связью. В тактильно-силовом телеприсутствии силовая обратная связь дополнена тактильной обратной связью. Тактильная обратная связь всегда односторонняя. Силовая обратная связь всегда двухсторонняя.
Силовая обратная связь кроме силы и скорости изменения силы передает углы (рычажный манипулятор) и угловую скорость, или перемещение и скорость перемещения.
Тактильная обратная связь – аналог кожи человека, который тактильными пикселями передает текстуру поверхности, к которой прикасается человек-оператор силового телеприсутствия. Более совершенная тактильная обратная связь передает не только силу или вектор силы действующей на тактильный пиксель, но и температуру и/или тепловой поток тактильного пикселя.
Силовое телеприсутствие делят на:
1. силовое телеприсутствие роботизированное: аватар – робот
2. силовое телеприсутствие виртуальное: аватар – объект виртуального мира
3. силовое телеприсутствие электронно-биологическое (аватар фильма Джеймса Кэмерона): аватар – биообъект
Самая универсальная система силового телеприсутствия – система «костюм телеприсутствия – робот-андроид». В случае силового телеприсутствия виртуального костюм телеприсутствия называют костюмом виртуальной реальности, хотя конструктивного и программного различия между обоими костюмами нет. Различаются только аватары.
ТАКТИЛЬНО-СИЛОВОЕ ТЕЛЕПРИСУТСТВИЕ – управление (интерфейс «человек – робот») аватаром (манипулятором) через двухстороннюю силовую обратную связь и тактильную обратную связь. Тактильно-силовое телеприсутствие может быть дополнено видеосвязью и односторонней или двухсторонней акустической связью. Тактильная обратная связь всегда односторонняя. Силовая обратная связь всегда двухсторонняя.
Силовая обратная связь кроме силы и скорости изменения силы передает углы (рычажный манипулятор) и угловую скорость или перемещение (манипулятор с направляющими вместо шарниров) и скорость перемещения.
Тактильная обратная связь – аналог кожи человека, который тактильными пикселями передает текстуру поверхности, к которой прикасается человек-оператор силового телеприсутствия. Более совершенная тактильная обратная связь вместе высотой неровности в текстуре поверхности передает не только силу или вектор силы действующей на тактильный пиксель, но и температуру и/или тепловой поток тактильного пикселя.
Тактильно-силовое телеприсутствие делят на:
1. тактильно-силовое телеприсутствие роботизированное: аватар – робот
2. тактильно-силовое телеприсутствие виртуальное: аватар – объект виртуального мира
3. тактильно-силовое телеприсутствие электронно-биологическое (аватар фильма Джеймса Кэмерона): аватар – биообъект
Самая универсальная система тактильно-силового телеприсутствия – система «костюм телеприсутствия – робот-андроид». В случае тактильно-силового телеприсутствия виртуального костюм телеприсутствия называют костюмом виртуальной реальности, хотя конструктивного и программного различия между обоими костюмами нет. Различаются только аватары.
ОТРИЦАТЕЛЬНАЯ ОБРАТНАЯ СВЯЗЬ – обратная связь меняющая входной сигнал системы таким образом, чтоб противодействовать изменению выходного сигнала, чтоб ослабить причину рассогласования сигналов.
Отрицательная обратная связь – варианты:
1. Отрицательная обратная связь: способ глушения шумовых частотных диапазонов в усилителях подачей этих частот с выхода на вход с противоположной фазой и равной амплитудой.
2. Отрицательная обратная связь: способ глушения звука подачей звука с микрофона обратной связи на вход усилителя источника звука с противоположной фазой и равной амплитудой.
3. Отрицательную обратную связь используют все формы жизни: от клетки до экосистем. Цепи отрицательной обратной связи человека стабилизируют температуру тела человека на уровне 36,6°С, концентрацию диоксида углерода и глюкозы в крови… Отрицательная обратная связь взаимосвязью численности хищников, растительноядных животных, растений стабилизирует их численность, процентное соотношение в природе.
4. Отрицательная обратная связь односторонняя – способ управления рабочим органом (приводом) доводящий до нуля разницу цифры датчик-передатчика управляющего рабочего органа машины и цифры датчик-приемника исполнительного рабочего органа машины (системы). Средство управления электрическим, гидравлическим, пневматическим, механическим или иным способом вычитает цифру датчик-приемника исполнительного рабочего органа машины с цифры датчик-передатчика.
Получилось отрицательное число: средство управления приводом уменьшит на полученное число цифру датчик-приемника исполнительного рабочего органа машины. Получилось положительное число: средство управления приводом увеличит на полученное число цифру датчик-приемника исполнительного рабочего органа машины.
5. Отрицательная обратная связь односторонняя копирующих манипуляторов – способ управления приводом исполнительного манипулятора, доводящий до нуля разницу цифры датчика управляющего манипулятора и цифры датчика исполнительного манипулятора.
Варианты отрицательной обратной связи копирующих манипуляторов:
a) однодатчиковый копирующий манипулятор: привод держит постоянной силу в датчике-1 силы управляющего манипулятора. Переход за верхний или нижний порог датчика-1 включает привод управляющего и исполнительного манипуляторов. Обратный переход через порог выключает привод. Вместо датчика-2 для обратного движения управляющего манипулятора короткоходная пружина. Приводы двигают оба манипулятора в направлении векторной суммы силы управляющего манипулятора и силы реакции среды в исполнительном манипуляторе.
b) двухдатчиковый копирующий манипулятор: превышение порога разности силы датчика сгибания и силы датчика разгибания управляющего манипулятора включает привод обоих манипуляторов. Обратный переход через порог выключает привод обоих манипуляторов.
6. Отрицательную обратную связь используют в экзоскелете. Человек жмет пропорциональные датчики силы (пружинные или сенсорные кнопки, тензодатчики) рук, ног экзоскелета: пропорциональные датчики силы включая свой привод, убегают от человека, попутно двигая руками, ногами экзоскелета. При использовании пропорциональных датчиков внешняя среда физически управляет человеком приводами экзоскелета, если в установленном масштабе (от линейки резисторов, конденсаторов, катушек на ферритовых сердечниках, кварцевых колебательных контуров или графика в софте) сила человека меньше силы в приводах электродистанционного экзоскелета.
Отрицательную обратную связь в экзоскелете можно сделать без сложной электроники, без компьютера. Требуемую физиологией (пользование экзоскелетом без обучения) человека задержку управления экзоскелетом не > 0,1сек определяет средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека 10Hz.
Задержка управления в отрицательной обратной связи это время разгона приводом части машины до максимальной скорости и последующего торможения до нуля с учетом упругих деформаций, люфтов машины. Для реверсивных машин (экзоскелет) задержка управления в отрицательной обратной связи это половина времени цикла «разгон – торможение – реверсивный разгон – торможение» с учетом упругих деформаций, люфтов.
7. Электродистанционная двухсторонняя отрицательная обратная связь: привод органа управления машины по проводам, по оптоволокну (по радио, по оптическому, инфракрасному, ультрафиолетовому, рентгеновскому, терагерцовому каналу, по гамма-лучам, по ультразвуковому, по нейтронному, по нейтринному, по мюонному каналу, по протонному или ионному каналу в вакууме…) соединяет с приводом рабочего органа машины 2 или 4 каналами связи + 2 привода (актуатора) + 2 датчика угла (перемещения) + 2 датчика силы (давления).
Канал-1 разностью углов (перемещений) датчиков частей-А-В находит знак перемещения привода. По знаку канал-2 уравняет цифры датчиков углов, сил двигая приводом часть машины, где меньше сила.
Без датчиков силы двухсторонняя отрицательная обратная связь работает, но больше расход энергии, амплитуда паразитных колебаний; сила захвата, прижима (в манипуляторах) резко колеблется 0-100% при совпадении углов.
Электродистанционная двухсторонняя обратная связь передает 4 канала: угол (перемещение) + угловая скорость (скорость перемещения) + сила (момент) + скорость изменения силы (скорость изменения момента).
В технике двухстороннюю силомоментную отрицательную обратную связь называют электродистанционной системой управления: силу (момент, давление), угол (перемещение) передает линия связи без прямой механической связи. В списке функций: ограничения, калибровка, самодиагностика, тесты, отключение неисправного канала дублирования…
Электродистанционная двухсторонняя отрицательная обратная связь двигает орган управления машины, если в установленном масштабе (от линейки резисторов, конденсаторов, ферритовых катушек, кварцевых колебательных контуров или графика в софте) управляющая сила в органе управления меньше силы в приводе рабочего органа.
По знаку направления перемещения привода приоритет у канала датчиков угла, по величине перемещения приоритет у датчиков силы. Электродистанционную отрицательную обратную связь можно сделать без сложной электроники, без компьютера.
8. Отрицательная обратная связь автономных роботов: компьютер автономного робота в реальном времени по алгоритмам строит виртуальную модель действия, подключая к ней в реальном времени отрицательную обратную связь «модель действия – приводы, датчики робота».
Параметры отрицательной обратной связи: задержка управления, диапазон частот (сил, мощностей) паразитных колебаний, частота опроса датчиков, диапазон рассогласования углов, диапазон рассогласования сил, сила (момент), скорость изменения силы (скорость изменения момента), скорость, мощность, ускорение, угловая скорость…
Компьютерная отрицательная обратная связь: выходной сигнал компьютер подгоняет к входному по цифрам графика. Таблица решений может быть в электронной, в магнитной, в оптической, в механической (кулачок), в пневматической (вращающийся диск с отверстиями; двигающаяся лента с отверстиями; перфокарта с отверстиями; пневмоника), в электрохимической (диск, лента или нить с переменной толщиной электролитического покрытия), в радиационной (диск, лента или нить с переменным уровнем радиоактивного излучения: альфа или бета-излучения) или в другой форме.
ЭЛЕКТРОДИСТАНЦИОННОЕ УПРАВЛЕНИЕ – силовое управление человеком рабочим органом по линии связи без прямой механической связи.
ИНТЕРФЕЙС – средство соединяющее человека с техническими средствами получения, управления информацией или процессом.
АВАТАР-САЙТ: сайт для управления через костюм телеприсутствия аватаром виртуального мира на сервере или реальным андроидом на Земле, на околоземной орбите.
ЭВОЛЮЦИЯ СКАФАНДРА:
1. экзоскелет с электродистанционным (управление по проводам) интерфейсом. Электродистанционный интерфейс с экзоскелетом соединен только кабелем электропитания с цифровой линией связи: достаточно 2 провода на обратную связь, энергоподачу. Электродистанционный интерфейс экзоскелета: герметичная коробка с экзоскелетами рук, ног человека, разъемом кабеля соединяющая по проводам руки, ноги человека с руками, ногами экзоскелета.
Нет механических уплотнений движущихся деталей, герметичных соединений трубопроводов. Космонавт входит в коробку, герметизирует дверцу, управляет экзоскелетом. Электродистанционный интерфейс экзоскелета решает проблему герметизации космонавта от вакуума, от плотных горячих атмосфер планет типа Венеры.
Полеты космонавтов на планеты с большой гравитацией возможны в экзоскелетах с большим усилением: космонавты не потянут физически вес скафандра и тела. В скафандре космонавт наберет смертельную дозу радиации космических лучей за 200ч. Вес радиационной защиты от космических лучей, от солнечных бурь несёт экзоскелет.
2. телеуправляемый андроид. Андроидом экзоскелетным интерфейсом управляет человек в режиме копирующего манипулятора: отрицательная обратная связь по углам, силам через радиолинию связи. Телеуправляемый андроид дешевле, не требует затрат на восстановление здоровья космонавтов после планет с большой гравитацией, не требует энергии транспортировки космонавта, системы жизнеобеспечения, радиационной защиты. На горячих планетах типа Венеры телеуправляемые андроиды на порядки дешевле экзоскелетов с теплоизоляцией космонавта.
РОБОТ – приводной механизм с 2 и более степенями свободы, управляемый источником сигнала управления, имеющий некоторую автономность, движущийся в своей рабочей среде, выполняющий предназначенные ему задачи.
Источники сигнала управления роботом делят на:
1. бортовой источник (программное устройство) сигнала управления роботом. Эволюционировал от кулачкового программного устройства до современного компьютера
2. внешний источник сигнала управления роботом. Обычно компьютер
Бортовые источники сигнала управления роботом делят на:
1. программный источник сигнала управления роботом
2. программно-датчиковый источник сигнала управления роботом. Включает в себя не только программу, но и обратные (силовые, тактильные…) связи «датчик робота – привод». Программа корректирует выходной сигнал обратной связи или использует сигналы датчиков робота для распознавания объекта (среды), определения направления на объект и других целей. Пример: робот-андроид Asimo (Асимо) фирмы Honda
Внешние источники сигнала управления роботом делят на:
1. программное серверное управление роботом по линии связи. Пример: собака-робот Aibo фирмы Sony, управляемая искусственным интеллектом через интернет
2. управление роботом телеприсутствия через интерфейс «человек – робот». Примеры: человек управляет роботом телеприсутствия через геймпад, джойстик, экзоскелет, костюм телеприсутствия…
Пример внешнего источника сигнала управления робота: общий сервер управляет несколькими промышленными роботами одновременно.
Разделение на бортовой и внешний источник сигнала управления роботом определяет расстояние (пока нет международного стандарта) «робот – источник сигнала управления». Источник сигнала управления роботом может управлять не только приводами робота, но и параметрами (диаграмма направленности сонара или радара, фокусировка телекамеры…) датчиков робота.
Роботы делят на:
1. промышленные
2. военные (боевые, разведывательные, инженерные, саперные…)
3. медицинские (хирургические, диагностические…)
4. роботы-пожарные
5. подводные роботы
6. летающие роботы
7. транспортные
8. сельскохозяйственные
9. сервисные (профессиональные, персональные)
10. бытовые (роботы-животные, роботы-игрушки…)
11. социальные
12. роботы-учителя
13. роботы-актеры
14. исследовательские
15. роботы-планетоходы
16. микророботы
17. спортивные
18. секс-роботы
По энергоисточнику роботы делят на:
1. роботы на жидком топливе
2. роботы на электрическом аккумуляторе (супермаховик, химический аккумулятор…)
3. роботы на топливном элементе.
4. роботы на жидком газе (азот, углекислота…)
5. роботы на тепловом (рабочий орган: поршень, турбина…) аккумуляторе
По приводу роботы делят на:
1. с двигателем внутреннего сгорания (микротурбины, поршневые двигатели…)
2. электрические.
3. пневматические.
4. гидравлические.
5. с турбиной на жидком газе (баллон с углекислотой, с жидким азотом).
По типу соединения «двигатель – редуктор» роботы делят на:
1. роботы с прямым (неуправляемым) соединением двигателя с редуктором или манипулятором робота
2. роботы с управляемым (регулируемая муфта сцепления, регулируемый амортизатор) соединением двигателя с редуктором или манипулятором
По типу редуктора роботы делят на:
1. роботы с редуктором на зубчатых колесах (волновые и др.)
2. роботы с редуктором на основе пары «винт – гайка», «винт – шариковая гайка».
3. роботы с червячным редуктором.
4. роботы с тросовым редуктором.
5. роботы с кулачковым редуктором.
По типу рабочего органа привода пневматические, гидравлические роботы делят на:
1. поршневые.
2. лопастные.
3. турбинные.
4. искусственные мышцы из гибких диагонально-армированных трубок, сокращающихся в длине с подачей давления воздуха.
В IT-технологиях робот – автономно действующая программа: бот, поисковый робот…
АДАПТИВНЫЙ РОБОТ – робот с приводами имеющими обратную связь с датчиками оценки внешней среды. Адаптивный робот имеет софт с алгоритмами и параметрами обратных связей приводов с датчиками оценки внешней среды.
В адаптивных роботах приводы обычно имеют отрицательную обратную связь с моделью отслеживаемой области объекта в софте. Датчик оценки внешней среды находит разницу между отслеживаемой областью объекта в внешней среде и её моделью в софте.
Разницу софт передает на привод. Привод разницу уменьшает до нуля двигая захват, инструмент адаптивного робота.
Модель взаимодействия может обеспечивать обратную связь робота с внешней средой по:
1. положению рабочего органа робота относительно отслеживаемой области объекта внешней среды
2. параметрам излучения объекта в внешней среде
3. тепловому потоку через объект в внешней среде
4. электромагнитным параметрам объекта в внешней среде
5. электрическим параметрам объекта в внешней среде
6. другим параметрам объекта в внешней среде
Обратную связь захвата робота с датчиками оценки внешней среды делят на:
1. одномерную обратную связь. Угловое или линейное движение рабочего органа робота в одной оси пространства
2. двухмерную обратную связь. Угловое и/или линейное движение рабочего органа робота в двух осях пространства
3. трехмерную обратную связь. Угловое и/или линейное движение рабочего органа робота в трех и более осях пространства
Адаптивные роботы делят на:
1. роботы с собственными датчиками оценки внешней среды
2. роботы с внешними и собственными датчиками оценки внешней среды
Очувствленный робот не адаптивный, если нет собственных датчиков оценки внешней среды.
Адаптивные роботы применяют в сварке несерийных изделий, габаритных конструкций, при обслуживании станков с ЧПУ, при окраске, термической резке, шлифовке, фрезеровке, при нанесении клея или герметика. Адаптивные роботы компенсируют неточность сборки перед сваркой, отклонение геометрии изделия от чертежа.
Не адаптивные роботы можно сделать адаптивными оснастив датчиками (ультразвуковыми, инфракрасными...) оценки внешней среды с их софтом.
Адаптивные роботы с датчиками оценки внешней среды, предотвращающими столкновение робота с человеком, называют коботами.
КОБОТ – робот с датчиками оценки внешней среды, предотвращающими столкновение робота с человеком. Коботы – разновидность адаптивных роботов.
МАНИПУЛЯТОР:
1. манипулятор – закрепленный в точке опоры с одной стороны механизм перемещения в пространстве материальных объектов. Манипулятор может иметь дополнительно средства перемещения точки опоры манипулятора: направляющие, рельсы, колесный, гусеничный, шагающий движители, винты, крылья в воздухе или ракетные двигатели, силовые гироскопы.
2. манипулятор игровой – предмет с датчиками, с ограниченной двухсторонней линией обратной связи человека с игровой компьютерной программой или симулятором. В направлении «человек – компьютер» обратная связь по линии связи. В обратном направлении обычно зрительная обратная связь «экран – человек». Самый распространенный манипулятор игровой: геймпад.
3. Манипулятор компьютерный – интерфейс «кисть человека – курсор экрана», «телекамера, снимающая человека – компьютерная игра», «телекамера, снимающая человека – интерактивная функция». Манипулятор компьютерный – предмет с датчиками, линией ограниченной двухсторонней обратной связи человека с игровой компьютерной программой, с симулятором или с интерактивной функцией. В направлении «человек – компьютер» обратная связь по линии связи. В обратном направлении обычно зрительная связь «экран – человек». Самые распространенные манипуляторы компьютерные: компьютерная мышь, геймпад.
4. Манипулятор обратной связи – интерфейс с датчиками, соединяющий кисть, руку человека с управляемым им манипулятором робота односторонней обратной связью. Используют в программировании движений промышленных роботов. Манипулятор двухсторонней обратной связи выполняет двухстороннюю передачу сил, пространственного положения (углов) каналами обратной связи «человек – робот» и «робот – человек», «человек – аватар виртуальной реальности» и «виртуальной реальности аватар – человек», «человек – самолет» и «самолет – человек» (адаптивная система управления элеронами самолета). Двухсторонняя обратная связь работает по принципу вычитания сил: сила передается с той стороны, с которой сила больше. С учетом установок масштаба сил. Манипулятор обратной связи с двухсторонней обратной связью используют в авиации, в экзоскелетах, симуляторах, роботах.
АЛГОРИТМЫ ХОДЬБЫ АНДРОИДА
Исторически первый алгоритм ходьбы андроида – алгоритм «точка нулевого момента».
Алгоритм «точка нулевого момента» (упрощенно): в ходьбе при опоре андроида только на одну ступню, прикладываемый к голеностопному суставу (шарниру) крутящий момент от опоры ступни не должен двигать центр давления за пределы опорной поверхности ступни. В идеале момент нулевой, что означает – центр давления совпадает с центром опорной поверхности ступни.
Голеностопный шарнир андроида для управления устойчивостью имеет продольную и поперечную горизонтальные оси с моментами-1-2. Сигнал обоих моментов софт андроида берет с трех разнесенных датчиков силы снизу ступни. Вертикаль андроида поддерживает приводами двухосевой датчик наклона туловища. Датчик наклона не требует коррекции на поворотах.
Современные алгоритмы ходьбы андроида используют таблицы решений инерции андроида и выравнивание приводами сил в трех разнесенных датчиках силы ступни. Софт управляет приводами андроида, используя на разных скоростях и ускорениях ходьбы разные таблицы решений инерции андроида.
ВОЕННЫЙ АНДРОИД – мобильное шагающее двуногое двурукое оружие. Военный андроид может быть телеуправляемым, автономным с ИИ. Телеуправляемым андроидом управляет человек-оператор.
РЕГУЛЯТОР – материальный или информационный объект преобразующий сигнал (воздействие) на входе в соответствующий по заложенной в этот объект программе сигнал (воздействие) на выходе. Простые регуляторы имеют положительную или отрицательную обратную связь. Положительная обратная связь работает по принципу: чем больше сигнал на входе, тем больше на выходе; чем меньше сигнал на входе, тем меньше на выходе. Отрицательная обратная связь работает по принципу: больше сигнал на входе – меньше на выходе. Сложные регуляторы: регуляторы, использующие в своей программе положительную и отрицательную обратную связь. Пример: рынок – регулятор спроса на товары, услуги.
МУЛЬТИПЛЕКС (МУЛЬТИПЛЕКСИРОВАНИЕ) – соединение многих каналов информации через 2 провода (ШИНА), или в 1 оптоволокне, или в 1 приемопередатчике в 1 фиксированной частотной полосе. Чаще мультиплекс это соединение нескольких каналов информации в один общий канал. Табличный многоканальный сигнал датчика в мультиплексный сигнал превращает обычно микросхема. Мультиплекс делят на:
1. параллельный мультиплекс. Соединяя каналы информации в приемопередатчике параллельный мультиплекс обычно использует кратные несущие частоты.
2. последовательный мультиплекс
Параллельный мультиплекс разделяет сигналы:
1. по диапазону амплитуд
2. амплитудно-полярной модуляцией: в разной полярности разные амплитуды несущей частоты. Использовали: стереофоническое аналоговое радиовещание в ряде стран.
3. многочастотной модуляцией. Используют: радиоуправление моделями, телеметрия. Сигнал высокой частоты иногда используют как несущую сигнала низкой частоты.
4. многочастотно-полярной модуляцией: несущие частоты больше частоты полярности, в разной полярности разная несущая частота. Последовательность несущих частот может меняться. Число несущих частот неограничено.
5. частотно-полярной модуляцией: несущая частота больше частоты полярности.
6. многочастотной фазовой модуляцией. Используют: радиоуправление моделями, телеметрия.
7. фазо-полярной модуляцией: несущая частота больше частоты полярности.
8. по частотным полосам + восстановление канала верхней частотной полосы её биениями с опорной эталонной частотой. Использовали: квадрофоническая запись грампластинок.
9. по скорости роста амплитуды
10. суммарный сигнал + урезанный разностный сигнал на повышенной частоте, отделяемой фильтром от суммарного + восстановление разностного сигнала его биениями с эталонной частотой. Использовали: квадрофоническая запись грампластинок.
Последовательный мультиплекс разделяет сигналы:
11. по времени методом сканирования коммутатором ячеек табличного датчика с внесением в выходной сигнал кадрового импульса или кода конца цикла сканирования.
12. по времени импульсно-кодовой модуляцией. Используют: Интернет, телеметрия. Число каналов неограничено.
В сверхбыстром мультиплексе каждый потребитель мультиплекса самостоятельно обрабатывает стандартными алгоритмами весь поток информации, чтоб не тратить время на поиск и декодирование обработанной информации от других потребителей. В параллельном мультиплексе проще обработка каналов, нет проблем с коммутацией каналов.
НАПРЯЖЕНИЕ – цифра (в Вольтах) пропорциональная средней скорости элементарных зарядов (электроны, ионы) прошедших через сечение.
СИЛА ТОКА – цифра (в Амперах) пропорциональная количеству элементарных зарядов (электроны, ионы) прошедших через единицу сечения за единицу времени.
ТОК ПРОВОДИМОСТИ – направленное перемещение ионов (или «дырок» в полупроводниках) и (или) электронов в проводниках и полупроводниках.
ТОК СМЕЩЕНИЯ – продольная волна передаваемая электронными оболочками одних молекул электронным оболочкам других молекул. Максимальная длина электронной волны тока смещения равна удвоенному смещению электронной оболочки молекулы. С помощью тока смещения используют диэлектрик как антенну или провод для передачи электроэнергии или информации. Ток смещения имеет практическое значение в диапазоне частот индивидуальном для каждого вещества.
ТОК ПОЛЯРИЗАЦИИ – продольная волна переменного или пульсирующего тока, передаваемая электронными оболочками молекул одной обкладки конденсатора к другой. Максимальная длина волны тока поляризации равна удвоенному смещению электронной оболочки молекулы одной обкладки конденсатора. С помощью тока поляризации электроэнергия или информация передается сквозь диэлектрик с гальванической развязкой входного и выходного токов. Ток поляризации прямо пропорционален:
1. площади перекрытия обкладок конденсатора
2. скорости нарастания тока
3. частоте тока
4. диэлектрической проницаемости диэлектрика между обкладками конденсатора.
Ток поляризации обратно пропорционален толщине диэлектрика между обкладками конденсатора.
ТОК ИОННЫЙ – движение ионов переносящее положительный заряд.
ТРАНСФОРМАТОР ПОСТОЯННОГО ТОКА – трансформатор в первичной обмотке которого ток медленно нарастает, быстро спадает (распространенный вариант), или быстро нарастает, медленно спадает. В вторичной обмотке наводится пульсирующий постоянный ток. Используют для бесконтактного теплоизолированного наполнения энергией сверхпроводникового кольцевого накопителя энергии.
РАЗНИЦА МЕЖДУ УГЛОМ АТАКИ И ТАНГАЖОМ
Угол атаки самолета – угол между вектором его движения и продольной осью фюзеляжа. Тангаж у самолета – угол между горизонтальной составляющей вектора движения и продольной осью фюзеляжа.
Угол атаки у ракеты, подлодки – угол между вектором её движения и продольной осью ракеты, подлодки. Тангаж у ракеты, подлодки – угол между горизонтальной составляющей вектора движения и продольной осью ракеты, подлодки.
Угол атаки измеряют в системе координат привязанной только к двигающемуся аппарату.
Тангаж измеряют в системе координат привязанной к вертикали Земли, к горизонтальной составляющей вектора движения аппарата. Начало координат – центр масс аппарата.
Для горизонтально летящего самолета угол атаки и тангаж совпадают. Они различаются при вираже, изменении высоты полета любого летательного аппарата.
Тангаж по горизонту отсчитывать не верно из-за:
1. при увеличении высоты полета горизонт уходит вниз из-за шаровидной формы Землм
2. понятие тангаж используют на подлодках, которые горизонт не могут видеть ни глазами подводников, ни датчиками
3. горизонт виден не всегда, вертикаль (для построения горизонтальной составляющей вектора движения аппарата) фиксирует человек или датчики летательного аппарата. Датчики находят вертикаль прямыми (датчик угла наклона, гироскоп) и косвенными способами (инфракрасный датчик вертикали космического корабля, датчик астронавигации...).
Тангаж у кораблей – угол продольной качки.
Угол атаки космического корабля – угол между вектором его движения и его основной аэродинамической поверхностью.
ФЛАТТЕР – высокоамплитудный резонанс разрушающий конструкцию консольных аэродинамических плоскостей летательных аппаратов от давления потока газа. Впервые: 1917г при замене деревянных плоскостей винта самолета стальными. Флаттер убирают повышением жесткости консоли, применением высокомодульных материалов, установкой противофлаттерного груза в свободном конце консоли, уменьшением скорости газового потока.
АЭРОДИНАМИЧЕСКИЙ ФОКУС – точка приложения силы газового потока к объекту. Расположение точки приложения силы зависит от угла атаки, скорости, химического состава газового потока, формы тела, смещения центра масс от центра объема.
АЭРОДИНАМИЧЕСКАЯ ОБРАТНАЯ СВЯЗЬ:
1. Аэродинамическая обратная связь – стабилизация летательного аппарата энергией встречного потока воздуха через плоскости стабилизаторов в задней части летательного аппарата
2. Аэродинамическая обратная связь – стабилизация летательного аппарата энергией встречного потока воздуха роллеронами: маховиками с турбинными лопатками. Впервые роллероны в аэродинамической обратной связи применил в 1952г Уильям Б. Мак-Лин в созданной им ракете «Сайдуиндер»: внутри плоскостей задних аэродинамических стабилизаторов маховик с турбинными лопатками снаружи обода маховика. Наружу из свободного конца плоскости каждого стабилизатора торчат только турбинные лопатки маховиков. Встречный поток воздуха раскручивает лопатками турбины-маховики до сотен оборотов в секунду. Гиромомент маховиков, поддерживая постоянной ориентацию осей маховиков, поворотом стабилизаторов выполняет угловую 3D-стабилизацию (не более 1 радиан в секунду) ракеты
3. Аэродинамическая обратная связь от энергии встречного потока воздуха может управлять летательным аппаратом не только силовым действием на управляющие плоскости, но и вычислять управляющий сигнал пневматическими струйными элементами пневматического компьютера, работающего на энергии встречного потока воздуха
4. Аэродинамическая обратная связь от энергии встречного потока воздуха может выполняться не только силовым действием на исполнительный элемент обратной связи или вычислением управляющего сигнала обратной связи. Но и выполняться через использование энергии встречного потока воздуха для функционирования датчика обратной связи. Например получать ультразвук для ультразвукового датчика энергии встречного потока воздуха, проходящего через ультразвуковой свисток. Аэродинамическая обратная связь может на гиперзвуковых скоростях использовать тепловой эффект в ударной волновой поверхности от энергии встречного потока для функционирования теплового датчика аэродинамической обратной связи. Аэродинамическая обратная связь может функционировать с использованием неограниченного числа физических, химических, геометрических эффектов.
ГРАВИТАЦИОННАЯ НАВИГАЦИОННАЯ СИСТЕМА – дублирующая система навигации межконтинентальных баллистических ракет, использующая гравиметрическую карту Земли созданную спутниками гравитационного картографирования.
Гравиметрическая карта передает гравитационный рельеф Земли (гравитационный геоид), который нужно по некоторым территориям обновлять (не чаще нескольких десятков лет для баллистических ракет) после землетрясений. Гравиметрическая карта Земли высокого разрешения гостайна стран имеющих технологию её получения.
Исторически 1-я в ракетостроении – установленная в 1980-х на гироплатформе гантельная гравитационная навигационная система. Двухмерный датчик гравитации – две гантели из тяжелого немагнитного сплава, вращающихся на практически пересекающихся под прямым углом нитях крутильных весов. Гантели крест на крест расположены в одной плоскости. Их продольные оси перпендикулярны нитям крутильных весов.
Каждая половинка гантели находится между двумя половинками другой гантели. Гантели, стремясь расположиться параллельно вектору силы гравитации, поворачиваются на нанометры. На гантелях зеркала образуют с парными зеркалами в корпусе датчика лазерный интерферометр, превращающий взаимное перемещение зеркал в выходной сигнал пропорциональный частоте биений между частотой зеркальной волны и частотой опорного генератора волны.
Частота зеркальной волны и частота опорного генератора волны в виде разнесенных параллельных лучей, дают из-за сферической формы двух волн падающих на плоскую поверхность, интерференционные полосы на линейном многопиксельном фотоприемнике. При изменении частоты биений интерференционные полосы двигаются вдоль фотоприемника. Фотоприемник превращает движение интерференционных полос в выходной электрический сигнал.
Трехмерный вектор силы гравитации получают за счет накопления сигнала и перемещения ракеты перпендикулярно плоскости двухмерного вектора гравитации гравитационного датчика.
У термостабилизированной гантельной (взаимно перпендикулярные две гантели на крутильных весах) гравитационной навигационной системы морской ядерной ракеты «Трайдент» (вес датчика 20кг) круговое вероятное отклонение 500м (независимо от дальности полета) при отклонении конца вектора силы гравитации 10 в минус 5-й, 10 в минус 6-й степени длины вектора. Проекция этого вектора силы на горизонтальную плоскость дает сигналы коррекции движения ракеты. Главный вклад в точность гравитационной навигационной системы вносит информация скорости изменении величины и знака боковой проекции вектора силы гравитации на горизонтальную плоскость.
В момент коррекции движения сигнал гравитационного датчика теряется (координаты ведут другие навигационные системы). От алгоритма софта и системы коррекции курса требуют минимальное суммарное время коррекции курса за всё время полета.
Точность гравидатчика ограничена необходимостью увеличивать период усреднения (фильтрация вибраций ракеты) ускорения по вертикали при росте вибраций ракеты от сопротивления внешней среды, от активного управления ракетой борткомпьютером.
Точность гравидатчика прямо пропорциональна скорости изменения силы гравитации по ходу полета ракеты. Более низкие траектории полета ракеты увеличивают точность гравидатчика.
Гравидатчик ракет сравнивая полученный в полете гравитационный рельеф прилегающей местности с гравиметрической картой высокого разрешения в борткомпьютере, находит координаты ракеты даже без начальных координат, если известна скорость ракеты.
Борткомпьютер ракеты вводит поправки на центробежную силу вращения ракеты вокруг центра масс Земли, на высоту полета и все ускорения ракеты, на положение векторов сил гравитации Луны и Солнца по траектории полета ракеты, на изменение массы топлива в ракете. Искусственно создать помехи гравидатчику невозможно в отличие от других систем навигации.
В 2000-х в Евросоюзе создан гравидатчик спутника на основе двух взаимно перпендикулярно соединенных одним концом интерферометров Майкельсона с немагнитными зеркалами на всех трех концах датчика. Интерферометр Майкельсона изготовлен из трубы с вакуумом. При усилении гравитации в направлении оси трубы, она уменьшает свою длину. Для максимального изменения длины трубы она изготовлена из максимально тяжелого немагнитного низкомодульного (пружинящего) сплава с малым температурным расширением.
Новый датчик в спутнике гравитационного картографирования дал точность в ~1000 раз выше датчика гантельного типа: спутник определял изменение силы гравитации на уровне одной десятитриллионной части.
На новый тип датчика перешли ядерные баллистические ракеты России, Франции, США. Новый гравидатчик дает точность определения координат (зависит от разрешения спутниковой гравитационной карты Земли) ~90м, но из-за вибрации не работает на конечном атмосферном участке траектории полета. На конечном участке работают спутниковая и инерциальная система навигации.
Конструктивный аналог нового датчика – датчик гравитационных волн LIGO из двух взаимно перпендикулярно соединенных одним концом интерферометров Майкельсона, дающих выходной сигнал по принципу накопления сдвига фаз между импульсами света обоих 4-километровых плеч датчика LIGO. Датчик LIGO впервые в истории детектировал гравитационные волны.
Для увеличения чувствительности в каждом из двух плеч датчика LIGO ячейка Фарадея (модулятор света) пропускает через полупрозрачное зеркало-1 монохроматический импульс света к парному зеркалу-2 на расстоянии 4км. Затем ячейка Фарадея делает зеркало-1 непрозрачным, пока импульс света не переотразится между зеркалами 4000 раз. Затем ячейка Фарадея делает зеркало-1 снова прозрачным, чтоб импульс света попал на фотодетектор.
За 4000 отражений импульса света от зеркал-1-2 чувствительность датчика вырастает в 2000 раз – эквивалентно увеличению длины плеча датчика LIGO с 4км до 8000км. Аналогично устроено второе 4-километровое плечо датчика LIGO. Множество решений на высоком инженерном уровне позволяют датчику LIGO фиксировать изменение расстояния между зеркалами на 0,001 диаметра протона.
Имея такую точность подлодки, надводные военные корабли гравидатчиком по повороту проекции вектора силы гравитации в горизонтальной плоскости, находили бы крупные подлодки противника за многие километры.
НАВИГАЦИОННАЯ БАЗА:
1. навигационная база – несовпадающие 3 точки + информация с какой стороны от плоскости полусфера положительных чисел каждой координаты
2. навигационная база – несовпадающие 2 точки и плоскость
3. навигационная база – несовпадающие 1 точка и две непаралельные плоскости
4. навигационная база – 3 непаралельные плоскости
НАВИГАЦИОННАЯ КАРТА ВЕРОЯТНОСТИ – карта на которой цветом или другим способом указаны вероятность расположения объекта навигации.
ГЕОИД – материальная или цифровая модель поверхности планеты. Цифровую модель геоида использует компьютерный навигатор в спутниковой навигационной системе. Автоматическими станциями радиолокационным сканированием Венеры, Марса получены их геоиды. Гравитационные геоиды создают спутники гравитационного картографирования.
НЕИНЕРЦИАЛЬНАЯ СИСТЕМА КООРДИНАТ – система координат двигающаяся с линейным или угловым ускорением.
ИНЕРЦИАЛЬНАЯ СИСТЕМА КООРДИНАТ – система координат в которой линейное и угловое ускорения, центробежная сила в пределах допусков потребителя информации.
НУЛЕВАЯ ТОЧКА ОТСЧЕТА ПРОСТРАНСТВА – указанная или подразумеваемая в контексте точка с которой начинают координаты X, Y, Z. Если в контексте другая система координат, нулевую точку отсчета берут с неё. Система координат может быть инерциальной, неинерциальной.
ОРИЕНТАЦИЯ – угловое расположение объекта или линии направления в системе координат источника информации.
ЛИНИЯ НАПРАВЛЕНИЯ – прямая привязанная к системе координат источника информации.
СИСТЕМА – группа функциональных элементов с взаимной обратной связью.
УПРАВЛЕНИЕ – изменение выходного сигнала системы по алгоритмам входного сигнала и заданной базе данных.
РЕЖИМ РЕАЛЬНОГО ВРЕМЕНИ – диапазон времени задержки управления, обеспечивающий полнофункциональное управление объектом, процессом, ситуацией с обратной связью с первоисточником сигнала. Первоисточники сигнала: объект, процесс, ситуация. Для колебательных процессов диапазон ограничен сверху, снизу.
ПРОГРАММА – алгоритм или целевой список алгоритмов на компьютерном языке.
ИНТЕРНЕТ-ПОРТАЛ – многостраничный сайт или совокупность сайтов, собранных в одно целое главной страницей с гиперссылками по темам. Сайт в котором не меньше 4 разных тем с постоянными в полугодовом масштабе, пользователями + каталог + поисковик.
ВЕБ – информационная структура всемирной компьютерной сети.
НЕДОСТАБ – незаконченная статья интерактивных интернет-энциклопедий.
ОЩУЩАЕТ – процесс получения мозгом сигнала биодатчика.
ИСТИНА – информация по требованиям:
1. нет лжи
2. нет противоречий
3. нет чрезмерной избыточности
4. нет чрезмерной обобщенности
5. нет манипулирования пользователем
6. изложена в доступной пользователю форме. Пользователи: человек, животное, искусственный интеллект, машина, система…
Эти пункты не входят в истину религиозную, которая есть соответствие догмам.
НАУКА – система знаний об окружающей среде, построенная:
1. на принципе датчика (желательно технического, а не биологического) с требуемой в данной теме точностью, фиксирующего факты для подтверждения теории
2. на принципе оцифровки информации
3. на принципе математической модели
4. на повторяемости научных экспериментов для верификации
5. на доказательствах на основе фактов и логики, а не веры
6. на приоритете фактов против теорий
7. на принципе бритва Оккама
8. слова, понятия в науке могут иметь только однозначный смысл
9. научные понятия понимают в обобщенном смысле, если нет уточнений
10. на принципе познаваемости мира: материалистическая картина мира
11. на принципе свободной конкуренции научных теорий по признаку максимального правдоподобия для большинства ученых
12. статус «официальная научная теория» требует соглашения с статусом большинства ученых. В научных энциклопедиях, в школьном образования только официальные научные теории
13. теория научна если есть возможность её опровержения экспериментом
Цель науки – принести пользу обществу методами (научная теория) точного прогнозирования результата действия природных явлений. Уровень научности теории Наука измеряет точностью её прогнозов.
В рамках исключения в науке есть информация принимаемая на веру без доказательств: аксиомы, постулаты… Аксиому признают научной при условии:
1. научная теория построенная на основе аксиомы – утверждения без доказательств – может быть отвергнута без доказательств, если аксиома не признана большинством ученых
2. аксиома ненаучна если её опровергает научно доказанный факт
Часть ученых в науке принимает усилия для замены аксиом научной логикой.
В науке есть мысленный эксперимент.
Оценка наукой научных теорий, экспериментов, фактов проводится по большинству голосов при общем голосовании специалистов данной темы. В науке невозможна идеология. Идеология как система создания принципов, в общем виде исторически сложившаяся в религиозных, силовых и террористических организациях, не признает изменения своих принципов общим голосованием.
Идеология служит не истине как наука, а целям узкой группы общества. Наука служит всему человечеству. Идеология стремится к засекречиванию работы своей организации, наука стремится к открытости своих организаций, к свободному доступу к научной информации. Исключение: засекречены разделы фармацевтики, ядерной физики, гидроаэродинамики.
НАУЧНЫЙ ЭКСПЕРИМЕНТ – эксперимент соответствующий требованиям:
1. информация получена с датчиков требуемой в данной теме точностью. Технические датчики предпочтительнее биодатчиков (глаза, уши…) человека
2. выполняется условие повторяемости эксперимента
УЧЕНЫЙ:
Ученый – представитель профессии, цель которой познание естественных объектов, явлений, естественных процессов.
Ученый – нетехнический математик или первый познаватель общественно полезной информации, известной Природе, неизвестной Человеку.
Ученый – создатель познавательной модели естественного объекта или явления. Часто путают ученого с инженером. Разница между ученым и инженером – разница между наукой и техникой, разница между естественным (от природы) и искусственным (от человека). Ученый познает естественное (существующее независимо от человека) через модели природных явлений, инженер создает искусственное (технику). Ученый – это следователь, через модели явлений расследующий, познающий природные явления. Ученый создает только модели природных явлений в природных и технических объектах. Технику создают инженеры, не ученые. Атомные, термоядерные бомбы созданы инженерами, а не учеными. Часть инженеров, создававших атомные, термоядерные бомбы, были учеными работавшими инженерами. Создание модели природного явления – не конечная цель ученого, средство ее достижения. Поэтому ученого нельзя назвать создателем в общем смысле. Создатель в общем, не в узкоспециализированном смысле – инженер. Ученый – Познаватель, инженер – Создатель. Разницу определяет цель профессии.
Изобретатель, геноинженер – разновидности инженера, а не ученого. Новые технологии создают инженеры, а не ученые.
КОНСУЛЬТАНТ – человек непосредственно участвующий в профконкуренции в мировом рынке, потому способный отвечать на профессиональные вопросы на которые не могут ответить профессора вузов из-за их неучастия в профконкуренции в мировом рынке. Лично для учащихся консультант имеет статус выше профессора вуза. Профессора вузов могут 3 года абстрактными теориями и высшей математикой объяснять учащимся тему, тогда как консультанту обычно хватает 2-30 минут простыми словами дать ключевую для рынка информацию по теме без информационного мусора.
ИНЖЕНЕР:
1. Инженер – представитель профессии, целью которой создание или поддержание работоспособности искусственного объекта, искусственной системы
2. Инженер – создатель информации об структуре искусственного многофункционального материального средства достижения цели или технологии его изготовления, эксплуатации
3. Инженер – создатель информации о структуре искусственно созданного товара
4. Инженер – технический математик (инженер-математик)
5. Инженер – технический программист (инженер-программист)
6. Инженер – специалист по технике безопасности
7. Инженер – специалист с высшим уровнем технического образования или самообразования.
Высшая форма инженера – изобретатель. Инженера путают с ученым. Разница между инженером и ученым – разница между техникой и наукой, разница между искусственным и естественным. Инженер создает искусственное, ученый познает естественное (существующее независимо от человека) через модели природных явлений. Создание модели природного явления – не конечная цель ученого, а лишь средство ее достижения. Поэтому ученого нельзя назвать создателем в общем смысле. Создатель в общем, не в узкоспециализированном смысле – инженер. Инженер – Создатель, ученый – Познаватель. Разницу определяет цель профессии. Технику создают инженеры, не ученые. Атомные, термоядерные бомбы созданы инженерами, не учеными. Часть инженеров, создававших атомные, термоядерные бомбы, были учеными работавшими инженерами. Новые технологии создают инженеры, не ученые. Геноинженер – разновидность инженера, не ученого.
ИЗОБРЕТАТЕЛЬ – высшая форма инженеров претендующая на контроль над мировым рынком, инженер решающий инженерные проблемы на уровне мировой новизны.
ИННОВАТОР – мелкий улучшатель уровня рыночного чмошника.
СОЗДАТЕЛЬ – разумный субъект создавший, создающий искусственный материальный или информационный объект, несущий в себе ценность для общества.
КОНСТРУКТОР (профессия) – создатель информации об структуре многофункционального материального средства достижения цели.
НАРОДНЫЙ КОНСТРУКТОР (профессия) – конструктор-самоучка.
ТЕХНОЛОГ – создатель способа изготовления многофункционального материального средства достижения цели.
АВТОМАТ (система управления) – устройство выполняющее алгоритм без компьютера. Примеры: автомат стабилизации ракеты, автомат перекоса в вертолете, автомат повторного включения в электротехнике...
СТАНОК – оборудование для механической обработки заготовок деталей. От автоматической линии станок отличает:
1. все операции обработки заготовки используют основной привод инструмента.
2. заготовка фиксируется или перемещается только одним зажимом или на одной базовой поверхности
По приводу станки делят:
1. электромеханические станки
2. станки с пневмоприводом
3. станки с гидроприводом
КОСМОНАВТИКА – отрасли инженерии и науки ставящие своей конечной целью безопасное расселение человека по всей Галактике.
МАШИНА – материально-информационная структура из датчиков, системы управления (средство обработки сигналов от датчиков и выдачи команд на рабочие органы), рабочих органов, трансмиссии, движителей (механизмы силового взаимодействия с окружающей средой).
ТЕХНИКА:
1. техника – искусственно созданная разумной формой жизни функциональная материальная структура
2. техника – созданные разумной формой жизни материальные многофункциональные средства достижения цели. Техника – не генная многофункциональная материальная структура. Техника и гены – это 2 технологически противоположные многофункциональные материальные структуры. Техника как и гены может самокопироваться (производство промышленность) и передавать наследственную информацию (перезапись компьютерных программ, баз данных). Но не делает это на молекулярном уровне в отличие от генов. В смысле самозарождения гены технологически более многофункциональны. Это причина того, что многофункциональные материальные (не чисто виртуальные компьютерные) структуры могут самостоятельно возникнуть только генным путем. В отличие от генных многофункциональных материальных структур техника имеет меньше ограничений на использование в структуре разных материалов, физических, химических эффектов. Меньше ограничений на надежность, на использование в внутренней, внешней среде широких диапазонов температур, давлений, ускорений, уровней радиации, агрессивных веществ. Начиная с некоторого ненулевого момента эволюции техника становится технологически более многофункциональна чем генные структуры. С этого момента скорость эволюции техники превосходит скорость эволюции генных структур.
3. техника – неприродная функциональная материальная структура, созданная другой неприродной функциональной материальной структурой
4. техника – функциональные материальные структуры, полученные неприродными способами самоструктурирования
5. техника – неприродная неживая или живая (самостоятельные разумные роботы) функциональная материальная структура
ГОЛОГРАММА – биения оптических волн (отраженной волны освещающей объект и волны опорного генератора) сохраненные как монохромный рисунок на поверхности пленки или другого носителя. Цветная голограмма состоит из трех (красная, синяя, зеленая) монохроматических голограмм. Оптические волны могут быть заменены радиоволнами, ультразвуком. Голограмму можно передать по цифровой линии связи.
ГОЛОГРАФИЯ – метод создания 3D-изображения записью биений (интерференции) отраженного от объекта объектного луча и опорного луча в виде монохромного рисунка – голограммы. Оба луча имеют одинаковую длину волны. Цветное 3D-изображение получают тремя парами лучей создающими через 3 монохромных фильтра 3 монохромных рисунка на пластинке (пленке). 3D-изображение воспроизводят освещением голограммы использованной при записи длиной волны. Для записи голограммы можно использовать радиоволны, ультразвук. Голограмму можно передать по цифровой линии связи.
ЭРГОНОМИКА ДЛЯ ПРОФЕССИОНАЛОВ – конструирование по принципу: минимальный труд профессионального пользователя.
ЭРГОНОМИКА ДЛЯ НЕПРОФЕССИОНАЛОВ – конструирование по принципу: минимальный труд непрофессионального пользователя.
Три стадии эволюции систем с обратной связью:
Система с обратной связью: объект (система) из: датчики + источник сигнала управления + привод + рабочие органы (исполнительные элементы). Система с обратной связью материальная: из вещества. Система с обратной связью информационная: компьютерная программа, у которой есть функциональные аналоги:
1. датчики: входные каналы информации.
2. источник сигнала управления: софт обрабатывающий информацию.
3. рабочие органы: выходные каналы с выходным сигналом.
Стадия-1 эволюции системы с обратной связью:
1. разные функциональные элементы объекта эволюции механически, химически или информационно неотделимы друг от друга. Эволюционные изменения тратятся в основном на достижение ресурса, равнопрочности, надежности объекта
2. технология, конструкция объекта упрощаются
3. эволюция идет к структуризации материальной части объекта
4. эволюция идет к структуризации информационной структуры процесса обработки информации компьютером объекта
5. эволюция идет к иерархизации, к централизации информационной структуры процесса обработки информации компьютером объекта
6. объем обрабатываемой информации уменьшается
7. количество датчиков, информационных каналов уменьшается
8. эволюция идет к структуризации, к иерархизации, централизации информационной структуры датчиков
9. эволюция идет к структуризации, к иерархизации, централизации информационной структуры системы обработки сигналов датчиков компьютером объекта
10. эволюция идет к универсальности объекта, к упрощению сопряженных с ним структур
Стадия-2 эволюции системы с обратной связью:
1. начинается, усиливается механическое, химическое, информационное отделение функциональных элементов друг от друга. Эволюционные изменения тратятся в основном на увеличение количества, качества функций объекта
2. технология, конструкция объекта усложняются
3. эволюция идет к структуризации материальной части объекта
4. эволюция идет к структуризации информационной структуры процесса обработки информации компьютером объекта
5. эволюция идет к иерархизации, к централизации информационной структуры процесса обработки информации компьютером объекта
6. рост объема обрабатываемой информации
7. рост количества датчиков, информационных каналов
8. эволюция идет к структуризации, к иерархизации, централизации информационной структуры датчиков
9. эволюция идет к структуризации, иерархизации, централизации информационной структуры системы обработки сигналов датчиков компьютером объекта
10. эволюция идет к узкой специализации объекта, к усложнению сопряженных с ним структур
Стадия-3 эволюции системы с обратной связью:
1. слияние в единое целое механических, химических, информационных функциональных элементов
2. технология, конструкция объекта упрощаются
3. эволюция идет к деструктуризации материальной части объекта
4. эволюция идет к деструктуризации информационной структуры процесса обработки информации компьютером объекта
5. эволюция идет к деиерархизации, к децентрализации информационной структуры процесса обработки информации компьютером объекта
6. объем обрабатываемой информации уменьшается
7. количество датчиков, информационных каналов уменьшается
8. эволюция идет к деструктуризации, к деиерархизации, децентрализации информационной структуры датчиков
9. эволюция идет к деструктуризации, к деиерархизации, децентрализации информационной структуры системы обработки сигналов датчиков компьютером объекта
10. эволюция идет к универсальности объекта, к упрощению сопряженных с ним структур
2002г: бумажная версия сайта (текст, рисунки механизмов костюма телеприсутствия). Компьютерная версия 01.2003г. Английская версия этого сайта в Интернете с 2004г. Английскую версию сайта я регистрировал на доменах robotsoldier.nm.ru (в нем сайт был в 2004г), robotsoldier.net (в нем сайт был 19.04.2005 – 05.2007г), androiduniversity.com – в нем сайт с 05.2007г. Русская версия сайта – institutrobotov.ru – в Интернете с 14.10.2005г.
2007г посещаемость androiduniversity.com institutrobotov.ru 1200чел/месяц, после чего 02.2008г их на неделю удалила с интернета Россия. 1.03.2012г – Россия на неделю удалила мои сайты.
05.2025г хостер сайта незаметно без уведомления вывел домен androiduniversity.com с обслуживания. Его больше нет. Регистратор, хостер разные организации. Не хватало денег на эту проблему.
50% посетителей в год заходит в institutrobotov.ru неопознанно анонимно.
В большой картинке в начале сайта Россия закрасила черным (в бумажном чертеже тоже) шлицы в оси многодискового сцепления кулачкового привода тросов. До этого Россия украла диск с сканом 54Мб этой картинки.
В США этот сайт шел с вырезанным телефоном в начале сайта – за рубеж шла только фальшивая страница сайта от силовиков. Телефон на сайте с 2005г. По содержанию моего сайта никто никогда звонил.
Регистрировал этот сайт в международном каталоге DMOZ: государство сразу создало копию сайта в домене из хаотичных букв и цифр, заменило им мой сайт в результатах яндекса и гугла. DMOZ отказал регистрировать сайт: запрет сайтов с зеркалами. За 3 недели я уничтожил фальшивый домен моего сайта, но DMOZ уже отказал.
Зафиксировал 2 случая удаления текста моих писем при передаче с местного e-mail на зарубежный.
Сделаю androiduniversity.com сайтом с службой профзнакомств робототехников обоего пола + техническая интерактивная энциклопедия – система профессионального самообразования инженеров. Техническая информация в анимации. Одновременный перевод на 10 языков. Тематические форумы, каталог роботских сайтов, фирм. Сайт представит мою Всемирную робот-организацию: чемпионаты мира по рукопашному бою андроидов с ИИ, андроидов управляемых с костюма телеприсутствия. Создам Институт роботов в который войдут:
1. институт ускоренных испытаний: создание библиотеки технологий ускоренных испытаний любых объектов. Создание дешевого, легкого, компактного оборудования и методов ускоренных испытаний объектов, технологий.
2. институт изучения механизмов саморазрушения сложных систем (государства, машин, др. систем). Разработка механизмов диагностики, защиты сложных систем от саморазрушения.
3. институт Госкибернетики
4. институт взаимно независимых логических экспертов (теория военного трибунала, система оценки профлогики действий военных, гражданских служащих, теория профессионального суда и бесконфликтной работы профколлективов).
Создам личную изобретательскую фирму GE2.0 Готовлю разработки для неё.
Бесшумный газотурбинный двигатель андроида Айзек.
Андроиды, экзоскелеты, автомобили, самолеты будут работать от бесшумного (нет механизмов модуляции потока газа) многотопливного газотурбинного электрогенератора с стакан-турбиной изображенной выше.
Растягивающие усилия в лопатках (треугольные выступы условно названы лопатками) турбины заменены на сжимающие: используем для лопаток хрупкую высокотемпературную керамику с 3000°С на лопатке + дросселирование на входе + регулирование газового сопротивления турбины сопловым аппаратом для сохранения КПД и оборотов на частичных нагрузках + постоянные обороты турбины на любых нагрузках + другие мои изобретения обеспечат КПД газотурбинного двигателя до 50%.
Перепад температур с неохлаждаемой и охлаждаемой поверхностей турбины использует полупроводниковый термоэлектрический генератор электричества для отвода электронами части тепла в виде регенерированной электроэнергии. Её отводит с ротора турбины вращающийся трансформатор.
Трехступенчатый центробежный компрессор гонит воздух после ступени-3 вокруг внешней вращающейся цилиндрической части изобретенной мной высокотемпературной стакан-турбины, охлаждая ее. 3 ступени компрессора: давление на выходе 20-30атм. Больше давление воздуха – выше КПД, меньше расход воздуха, размеры воздушного фильтра.
Осевые компрессоры из-за помпажа (резонанс-скачков давления) не годны для турбин с постоянной частотой вращения с их резкими колебаниями расхода воздуха. Центробежный компрессор устойчив к помпажу при сверхглубоком дросселировании двигателя: большую часть ресурса двигатели автомобилей, наземной военной техники работают в режиме частичной нагрузки.
ГТД всегда работает на постоянной частоте вращения. Выходной крутящий момент меняется за счет глубокого одновременного дросселирования входа компрессора и соплового аппарата турбины. ГТД постоянной частоты вращения с центробежным компрессором набирает мощность 100 раз быстрее.
После 3 центробежных ступеней компрессора воздух идет в несколько параллельных круговых камер сгорания с 3-кратно дублированными форсунками + 3-кратно дублированная система поджига (запуск) двигателя. Лопатки ступени-3 компрессора закреплены непосредственно на торцевом диске-1 цилиндра турбины, утилизируя (функция теплообменника воздуха) за счет большой разности температур, тепло отработавших газов двигателя.
С другой стороны лопаток ступени-3 компрессора закреплен диск-2, к которому прикреплена труба-ось ротора большого диаметра, внутри которой все 3 ступени компрессора + турбина + камера сгорания. В концах этой оси закреплены внешние кольца роликоподшипников. Внутренние кольца роликоподшипников закреплены в съемных торцевых крышках неподвижного цилиндрического корпуса двигателя.
С съемной торцевой крышкой с стороны компрессора соединена неподвижная цилиндрическая ось неподвижных лопаток, тормозящих тангенциальную (круговую) скорость воздуха после ступеней-1-2 компрессора. Без торможения круговой скорости воздух не сжать в следующей центробежной ступени компрессора.
За последней центробежной ступенью компрессора тормозящего аппарата нет, чтоб не терять энергию кругового движения воздуха. Энергию кругового движения воздуха используют (смешивание топлива с воздухом) конические циклоны нескольких круговых камер сгорания. Каждая камера сгорания оптимизирована на определенные давление, температуру, влажность воздуха в воздухозаборнике. Это снижает вероятность заглохания, незапуска двигателя. Не запустится одна камера сгорания, запустится другая, через жаровые трубы запустит остальные.
При малом расходе воздуха часть конических циклонов отключат пружины клапанов или компьютерный привод с датчиками. При росте нагрузки двигателя для сохранения постоянного числа оборотов дросселированием уменьшается (управляемая заслонка) газовое сопротивление при входе газа в турбину и газовое сопротивление входа ступени-1 компрессора.
При холостом ходе двигателя те же обороты, но дросселированием расход воздуха через компрессор, расход газа через турбину доводятся до минимума. Ни при каких условиях обороты двигателя не меняются: все детали двигателя, его воздушный, газовый тракт, его подшипники, система шумоподавления акустически настроены на бесшумность только при стандартном числе оборотов.
Система управления двигателем обеспечивает теплоизоляцию горячих частей ГТД при холостом ходе мотора, чтоб камера сгорания и турбинная часть двигателя не остыли: часть времени холостого хода камера сгорания не работает, надо не дать двигателю остыть, чтоб не было проблемы повторного запуска.
Бесшумные роликоподшипники имеют простое число трубчатых (коаксиально-составных) упругих роликов: защита от резонанса. В бесшумном двухрезонансном роликоподшипнике внутрь смотанного однонаправленным углеволокном бесшумного ролика запрессован ролик из волокна с низкой скоростью звука в эпоксидной матрице. Звук глушит несовпадение фазы звука из-за разницы скоростей звука. Резонансные частоты двух трубок кратны простому числу для минимума шума. Постоянная упругая деформация роликов уберет радиальные зазоры, шум.
Большая инерция ротора сглаживает скачки момента выходного вала, температур, расходов в камере сгорания и турбине. Известны только 3 турбины без лопаток: турбина Герона Александрийского, дисковая турбина Николо Тесла и моя стакан-турбина. Стакан-турбина отличается от изображенной здесь отсутствием треугольных борозд на внутренней цилиндрической поверхности стакана. Патентом на изобретение защищена стакан-турбина.
Центробежная сила подводит к поверхности моей турбины только самые быстрые молекулы газа, выдавливая все медленные молекулы к оси турбины. Этого фильтра медленных молекул нет в турбине Теслы, поэтому у нее КПД ниже чем у моей турбины. Как изобретатель я профессионально порву Николу Тесла по любой теме. Стакан-турбину можно сделать многоступенчатой, вкладывая на спицах одни стакан-турбины внутрь других. 2003г: стакан-турбина успешно испытана на 15000об/мин и воздухе 5атм в заводе ЗИЛ в Москве.
В 2000г судовые газотурбинные двигатели обогнали по КПД судовые дизельные двигатели. Теперь поршневые двигатели обречены на вымирание. С их исчезновением вымрут топливная нефтеперерабатывающая промышленность, производство смазочного масла с присадками с их инфраструктурой, что усилит военную, экологическую безопасность государства, снизит расход нефти государствами.
Макивара покажет в табло силу удара
Измеряет силу удара независимо от направления, высоты удара. На рисунке: 2D-акселерометры-1-3-4; упругий материал-2-6; жесткая труба-5. Принцип измерения: закон-2 Ньютона. Используются 3 2D-акселерометра, закрепленные на равных расстояниях и углах от центра масс жесткой овальной трубы-5 с упругим покрытием. Сила удара: F = 0,33 m m – масса жесткой трубы с упругим покрытием = массе туловища человека; а1, а2, а3 – ускорения трех акселерометров по горизонтальной оси Х; а4, а5, а6 – ускорения 3-х акселерометров по горизонтальной оси Z. Компьютер, в жесткой трубе, вычисляет силу удара по этой формуле и по инфракрасной линии передает на отдельно стоящий или подвешенный к потолку дисплей. По оси Х аналоговые сигналы смешиваются электрически и через АЦП идут в компьютер. Аналогично по оси Z. Результат по формуле. При 4 акселерометрах: F = 0, 25 m
m – масса жесткой трубы с упругим покрытием = массе туловища человека; а1, а2, а3 – ускорения трех акселерометров по горизонтальной оси Х; а4, а5, а6 – ускорения 3-х акселерометров по горизонтальной оси Z. Компьютер, в жесткой трубе, вычисляет силу удара по этой формуле и по инфракрасной линии передает на отдельно стоящий или подвешенный к потолку дисплей. По оси Х аналоговые сигналы смешиваются электрически и через АЦП идут в компьютер. Аналогично по оси Z. Результат по формуле. При 4 акселерометрах: F = 0, 25 m
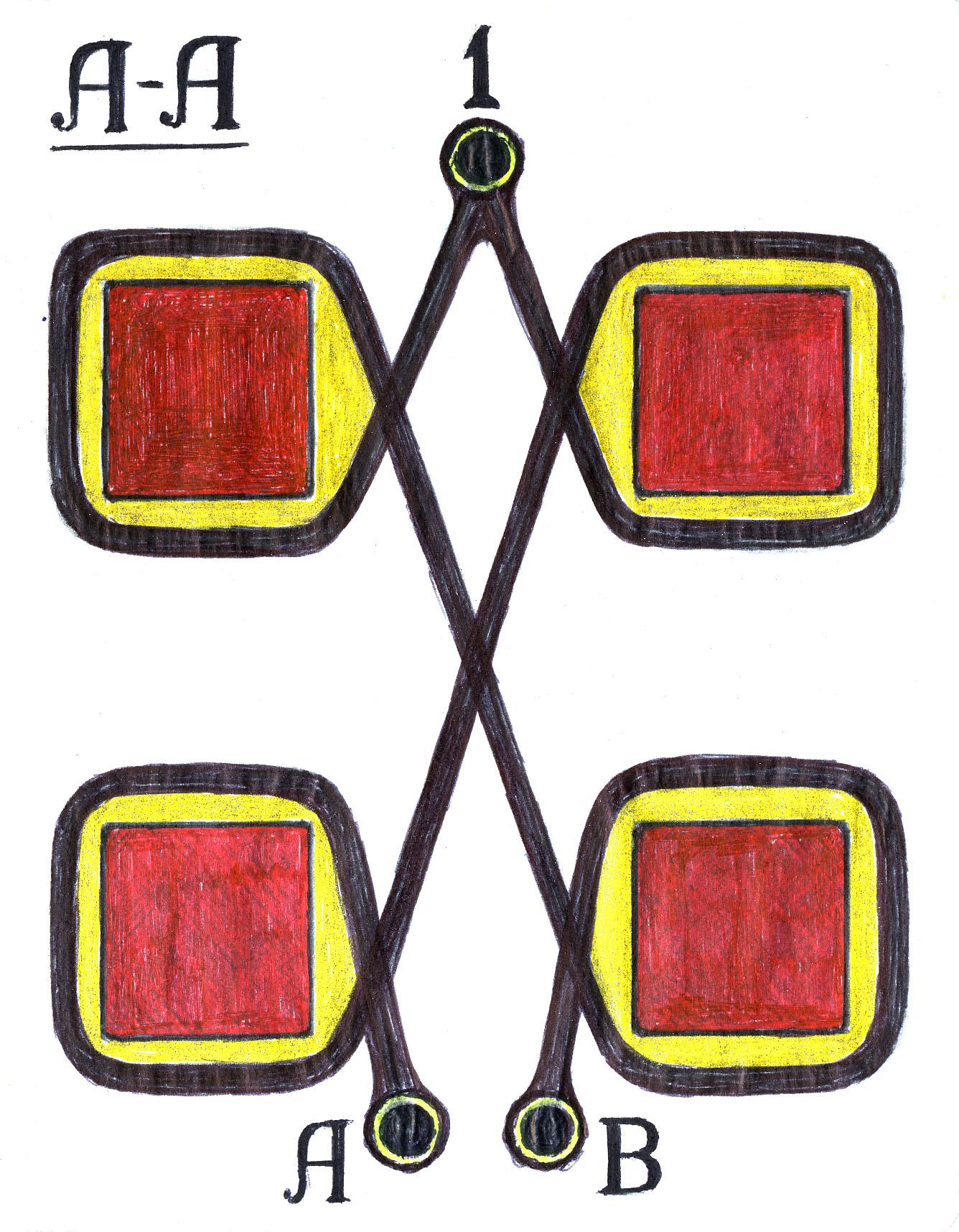
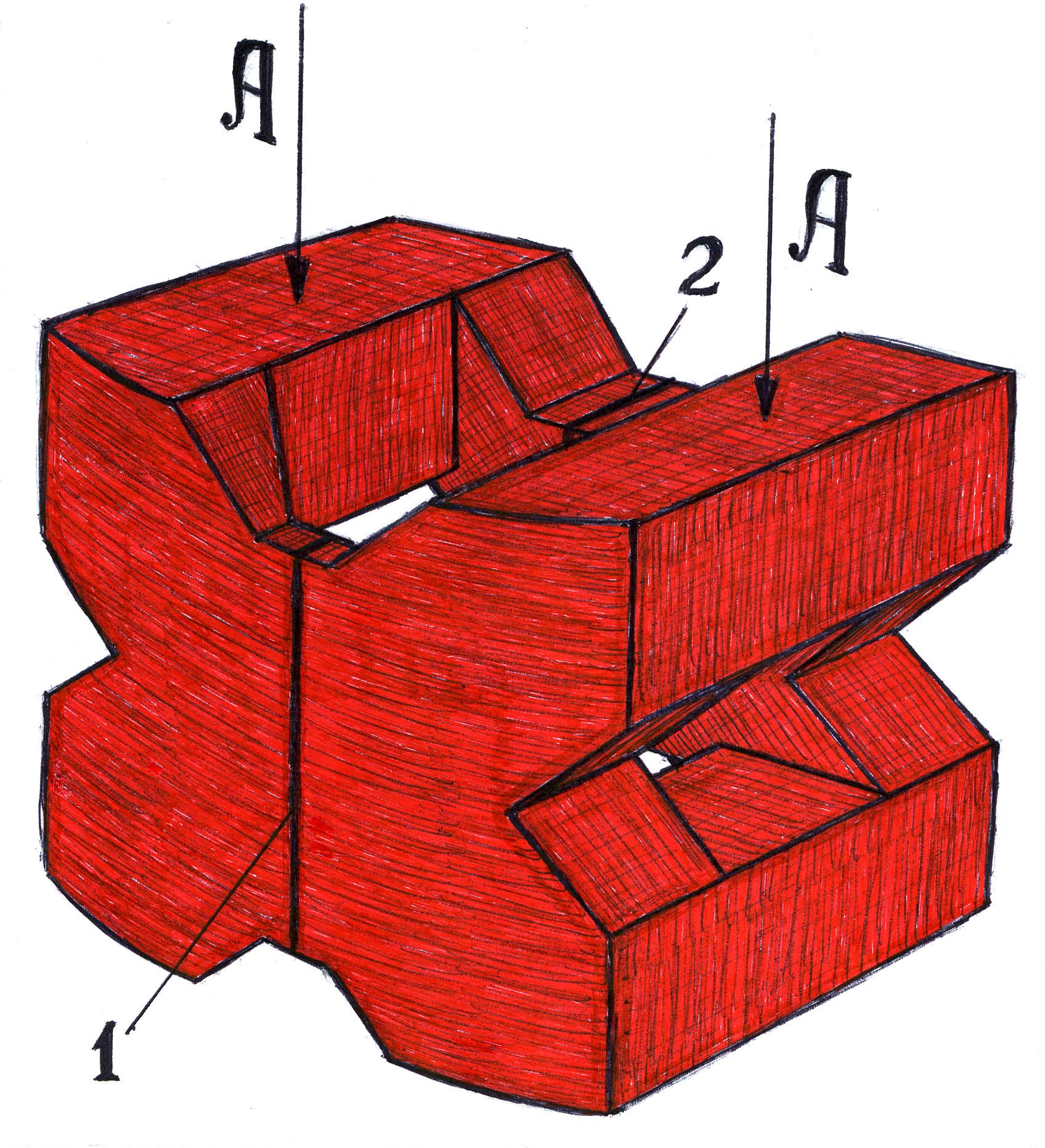
Магнитная 3D-головка с 3-канальной 3D-записью.
Магнитную 3D-головку записи-воспроизведения магнитофонов, магнитных дисков компьютеров придумал в 1980г. Емкость записи вдвое больше за счет записи вместо одного двух каналов с взаимно-перпендикулярными направлениями намагничивания, по 45 градусов в обе стороны от вектора движения 3D-головки по магнитной поверхности + укороченный канал-3. На чертеже А-А 1-магнитный 3D-зазор-1 записи, воспроизведения сигнала. Магнитный зазор-2 для размагничивания 3D-головки. Канал-1 в записи или воспроизведении образует обмотка, получаемой при использовании как входа при записи и выхода при воспроизведении сигнала контакта 1 и контакта А. Канал-2 подключен к контакту 1, к контакту В. Обоим каналам гальваническая развязка не нужна. Это упрощает конструкцию усилителей записи, воспроизведения. Для записи и воспроизведения канала-3 требуется гальваническая развязка: 2 диода с постоянным напряжением смещения (убирает ступеньку вольтамперной характеристики диода). Канал-3 получают при подключении к контакту-1 и к средней общей точке встречно направленных диодов гальванической развязки. Диоды противоположными концами соединены с контактами А и В соответственно. Усилители записи, воспроизведения канала-3 должны иметь гальваническую развязку с каналами-1-2. Канал-3 записывает ~100 раз меньше объем информации на пониженных частотах. Можно улучшить параметры канала-3 применив более сложную гальваническую развязку контакта А от контакта В. Есть другие незапатентованные способы многомерной записи, воспроизведения.
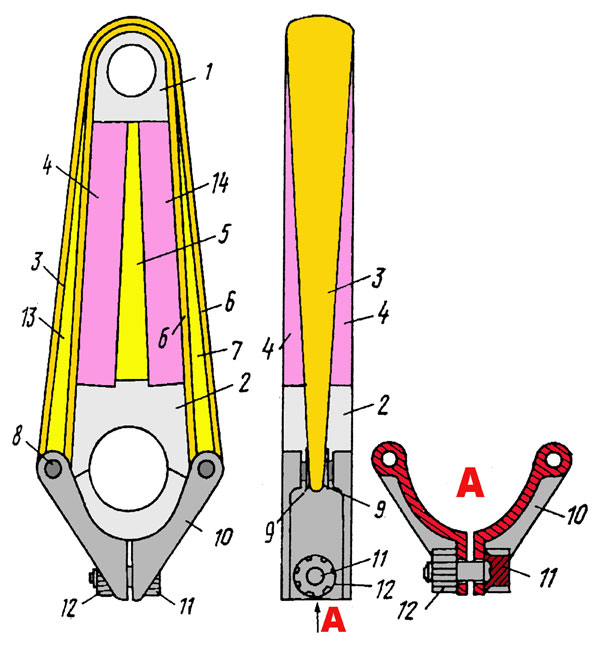
Шатун двигателя внутреннего сгорания.
Патент на изобретение №2170372: шатун: основной стержень с коленвал-подшипником-2 и поршневого пальца подшипником-1, крышка коленвал-подшипника-2 (снизу). Шатун снабжен стержнями-4-14, прокладкой между ними + 4 растяжки перекинутые через поршневого пальца подшипник-1, закрепленные на катушках-9 запрессованных на осях-8. Между каждой парой этих растяжек расположены прокладки-7-13. Крышки-10 коленвал-подшипника-2 установлены на пальцах-8 с запрессованными катушками. Крышки-10 установлены на пальцах-8 с запрессованными катушками-9. Крышки-10 скрепляют болт-11, гайка-12. Между стержнями-4-14 прокладка-5 из пеностекла. Между растяжками-3-6 прокладки-13-7 из пеностекла. Коленвал-подшипник-2, поршневого пальца подшипник-1, крышка коленвал-подшипника-2 (снизу) из композита с матрицей из магнийлитиевого сплава или алюминийлитиевого сплава с плазменным напылением поверхности трения. Стержни-4-14 из однонаправленного борволокна в эпоксидной матрице или однонаправленного углеволокна в эпоксидной матрице. Из титанового сплава: пальцы-8, катушки-9, крышки-10, болт-11, гайка-12 с наружними шлицами. Растяжки-3-6 из кевлара или углеволокна в эпоксидной матрице. Коленвал-подшипник-2, верхние части стержней-4-14, поршневого пальца подшипник-1, прокладки-5-7-13, растяжки-3-6 склеены мужду собой эпоксидным клеем. Изготовление, сборка: к прокладке-5 эпоксидной смолой приклеивают стержни-4-14. Сверху этой сборки приклеивают поршневого пальца подшипник-1, а снизу коленвал-подшипник-2. Прокладки-7-13 формируются на катушках-9, зафиксированных на оправке из 2-х технологических стержней (не показаны). Углеволокно пропитанное эпоксидной смолой по прокладкам-7-13 наматывают на одной катушке-9 по часовой стрелке, на другой катушке-9 против часовой стрелки. Далее обе катушки-9 снимают с технологических стержней, вставляют между отверстиями крышки-10 под пальцы-8. После чего в катушки-9 запрессовывают пальцы-8. Затем растяжки-3-6 закрепляют на поршневого пальца подшипнике-1 эпоксидным клеем. Снизу коленвал-подшипника-2 прикладывают без клея его нижнюю разъемную половинку, стягивают эту половинку крышками-10, болтом-11, гайкой-12 до отверждения смолы на растяжках-3-6 для создания предварительно напряженной конструкции. При технологическом стягивании крышками-10 болтом-11 в отверстие коленвал-подшипника-2 вставляют технологический стержень (не показан). После сжатия обеих частей крышки-10 болтом-11 в щель неотвержденных растяжек-3-6 вставляют прокладки-7-13, приклеиваемые к ним эпоксидной смолой. Щели вокруг прокладок-7-13 заполнит эпоксидная смола с коротковолоконным наполнителем.
Спутниковая навигационная система.

A – ближняя точка излучения радиоимпульса спутника.
B – дальняя точка излучения радиоимпульса спутника.
G, H – точки, в которых может находиться навигатор.  Представляют собой общие точки пересечения сфер равного расстояния от точек В, А с земной поверхностью, с навигатором.
Представляют собой общие точки пересечения сфер равного расстояния от точек В, А с земной поверхностью, с навигатором.
G – точка координат навигатора, исходя из его предыдущих координат.
K, G, P, H, E – часть окружности с радиусом R=|OK|, по которой пересекаются сферы равного расстояния от точек излучения В, А.
Плоскость вращения R=|OK| перпендикулярна земной поверхности.
C, N – проекции точек излучения радиоимпульса В, А на земную поверхность.
К, Е – точки, в которых может находиться самолет.
К – точка, в которой находится самолет, исходя из его предыдущих координат.
|KS|=|EF| – высота полета самолета.
F, S – это проекции K, E на земную поверхность.
S – земная координата самолета.
|СЕ| – проекция траектории спутника | ВО| на земную поверхность.
Координаты самолетного навигатора на земле: точка G – из уравнений слева вверху.
Координаты самолета: точка S из уравнений слева вверху.
BK, AK – расстояния прохода радиосигналом точного времени от навигационного спутника до летящего самолета.
Навигационный приемник: навигатор находит BK, AK по разнице времени «излучение – прием» радиосигнала точного времени.
В спутнике, навигационном приемнике самолета – синхронизированные высокоточные часы. В войне военные, часть гражданских спутников блокируют спутниковую навигацию ложными сигналами точного времени в указанных военными территории, времени.
Если в войне страна-1 блокирует ложными сигналами точного времени навигацию, страна-2 ответит повышением точности часов навигаторов, динамическим шифрованием сигнала точного времени.
Или на беспилотниках доставит радиосигнал точного времени в зону боевых действий для корректировки точности хода часов навигаторов. Вместе с динамически шифрованным сигналом точного времени беспилотник шифром передаст свои координаты.
Компьютер навигационного приемника расшифрует координаты беспилотника. Вычислит расстояние «беспилотник – навигатор», внесет в сигнал точного времени корректировку времени.
К моменту сбития авиационными противоспутниковыми ракетами спутников с ложным сигналом точного времени, часы навигаторов, участвующих в наступлении скорректируют. Спутники обеих сторон сбиты авиаракетами – их заменят беспилотники.
2 беспилотника с радиовысотомерами + рельеф местности в памяти навигаторов. Или вместо беспилотников: снаряд (ракета) с передатчиком точного времени + траектория снаряда (ракеты) в памяти навигатора. Односпутниковая система более живуча, чем обычная в равных условиях.
Навигатор по времени запаздывания сигнала точного времени найдет в таблицах решений 2 точки пересечения 2-х раздельных в времени радиолучей спутника с рельефом Земли (наземный навигатор) 2 координаты поверхности Земли. По аналогичным двум координатам в виртуальном высотном (от высоты самолета) огибающем рельефе полета + цифровой рельеф земной поверхности в памяти навигатора самолета + цифра радиовысотомера дают самолету его координаты.
Зеркальную координату-2 отсекает информация о направления оси поляризации радиоволны спутника. Для этого на спутнике 2 взаимно перпендикулярные линейно поляризованные антенны с углом 45° от вертикальной плоскости орбиты спутника.
Передача радиосигналов на одной частоте с разделением 2-х разных, стопроцентных по содержанию информации, каналов по оси поляризации есть в американском геостационарном телекоммуникационном спутнике «Комстар». В «Комстар» 2 антенны, одновременно работают на 1 частоте в 2-х каналах разных по вектору поляризации.
Перед каждой антенной «Комстар» установлен поляризующий экран в виде прямоугольного кольца с натянутыми на нем, с шагом ≤ 25% длины волны, параллельными позолоченными вольфрамовыми нитями. В поляризующем экране одной антенны нити ориентированы продольно, а в экране другой поперечно.
В моем спутнике две антенны с поляризацией излучения радиосигнала под углом 45° по разные стороны от плоскости орбиты. Левая по ориентации от плоскости орбиты спутника по ходу его движения антенна спутника излучает левый, по ориентации оси поляризации, радиосигнал.
Правая по ориентации от плоскости орбиты спутника по ходу его движения антенна спутника излучает правый радиосигнал.
В левом радиосигнале спутника больше число колебаний в цуге радиоволн импульса точного времени, чем в правом радиосигнале спутника.
В навигаторе мобильного телефона 2 радиосигнала 2-х антенн спутника принимают 2 антенны навигатора, 2 канала приемника. Антенны навигатора под углом 45° к плоскости орбиты.
Левая, относительно плоскости орбиты спутника по ходу его движения, антенна навигатора ловит сигнал левой антенны спутника, а правая от правой антенны спутника.
Навигатор отсечет зеркальную координату по различию числа колебаний в цугах импульсов левой, правой радиоволн спутника.
Если левая антенна навигатора справа от вертикальной плоскости орбиты спутника по ходу его движения, тогда она из-за изменения ориентации поймает сигнал правой антенны спутника. А правая антенна навигатора поймает сигнал левой антенны спутника.
На этот случай расположение (слева, справа) антенн навигатора к вертикальной плоскости орбиты спутника от определителя доплеровского сдвига по знаку (больше, меньше) изменения частоты радиосигнала спутника. Доплер навигатора отсечет зеркальную координату.
Обе антенны навигатора параллельны плоскости орбиты спутника – на экране мобильного телефона с спутниковым навигатором сообщение: поверните телефон на угол 90° вправо (влево) для работы навигатора. Проблем ориентации антенны нет в навигаторах мобильного телефона, автомобиля, самолета с 3, 4 взаимно перпендикулярных антенн (3-4 канала).
Для левой, правой антенн навигатора вместо линейной поляризации лучше левую, правую круговые поляризации пар антенн навигатора, спутника: не нужна точная ориентация антенн навигатора.
Разделяют правый, левый каналы радиосигнала точного времени спутника изобретенные мной компактные поляризованные антенны, или 2 поляризующих экрана 2-х антенн как в «Комстар».
Вне конкуренции односпутниковая навигация при военной навигации через дальнобойные снаряды с передатчиком сигнала точного времени. Траектория снарядов, шифр сигнала точного времени в памяти навигатора. Радиосигнал точного времени можно заменить инфракрасным или оптическим модулированным сигналом.
Признателен Владимиру Атаманову за освещение недостатков статьи. Плохая весть стоит тысячи хороших.
Я изобретатель Томас Эдисон (по паспорту) с надеждой обращаюсь к властям Индии (Бхарат) с просьбой разрешить реализовать разрабатываемый мной с 2002г проект костюма телеприсутствия и другие (занимаюсь ими полвека) мои изобретательские проекты (по выбору индийской стороны) на территории Бхарата с использованием возможностей быстро усиливающейся промышленности Бхарата. Обязуюсь выполнять все интересы Бхарата. Буду очень признателен властям Бхарата за предоставление мне возможности реализовать мои инженерные проекты (больше сотни проектов), которыми я занимаюсь десятилетиями, но несмотря на мои полувековые усилия не имел возможности реализовать их в России. Я не последний человек в мировой робототехнике и искусственном интеллекте – приложу все усилия чтобы не разочаровать власти Бхарата!
универсальный изобретатель Томас Эдисон
Я Томас Эдисон могу доказать работодателю – я чемпион мира по конструированию, искусственному интеллекту, изобретательству, технической физике и топливной химии. По конструированию, изобретательству, искусственному интеллекту я сильнее сборной мира – могу это доказать индийским работодателям.
Я как изобретатель, конструктор и военно-промышленный предприниматель профессионально сильнее Илона Маска по ракетной технике, робототехнике и автомобилям. Могу это доказать индийским работодателям.
В сверхсложных вопросах качество мозга невозможно заменить неограниченным количеством мозгов меньшего качества. Талант простыми, дешевыми средствами превосходит то, чего профессионалы достигают сложными, дорогими средствами.
Мне хватит 10 лет чтобы доказать – я стою больше двух миллиардов человек для мировой экономики. Получите (по конечному результату) 2 миллиарда среднестатистических работников за зарплату одного рабочего, наняв меня конструктором-изобретателем! Мои разработки и больше 1000 незапатентованных изобретений предоставлю работодателю из нехристианской, немусульманской, неиудейской, несоциалистической страны.
Продаю мозг в профессиональном смысле
+79055453610 89055453610 robotsoldier@yandex.ru facebook.com/institutrobotov t.me/institutrobotov
Костюм телеприсутствия и виртуальной реальности
Транзисторная муфта сцепления
Экзоскелет
Андроид
Искусственный интеллект андроида
Газотурбинный двигатель андроида Айзек
Гидробот. Робот-змея
Пушки межконтинентальные. Пушки подводные
Нейроинтерфейс
Протез
Алгоритм бега, ходьбы, защиты от толчка андроида
ИИ-поисковик
Тактильная кожа андроида
Телекамеры андроида
Защита радиоуправления
Компьютер андроида
Домашние роботы
Микробот
Беспилотник
Ракеты-носители
Сверхсветовой звездолет
Гравитационный навигатор для ракет
Красное смещение звезд
Нейтронная пушка
Луна
Автомобиль
Гонки Формула 1
Робоформула
Станки
Стереоколонка. Микрофон
Теория экономики. Антихристианская партия
Философия галактических колонистов
Теория эволюции
Инженерное образование
Энциклопедия для ИИ
Госкибернетика
Законы робототехники
Мои модели
Робосайты
institutrobotov.ru 2004-2025г