텔레프레즌스 슈트
텔레프레즌스 및 가상 현실 슈트 트랜지스터 클러치, 드라이브 외골격 안드로이드 안드로이드의 인공 지능 하이드로봇 대륙간 대포 신경 인터페이스 어두음 첨가 두 발로 걷는 로봇을 위한 걷기 및 달리기 알고리즘 인공지능을 이용한 검색엔진 피부 로봇 로봇 눈 무인 항공기 무선 제어 보호 로봇 컴퓨터 가정용 로봇 마이크로봇 무인 비행기 로켓 우주선 중력 항법 별의 적색편이 중성자 총 달 기지 자동차 포뮬러 1 경주 로봇 경쟁 새로운 기계 스테레오 스피커, 마이크 경제학 이론 은하 식민지 개척자의 철학 진화론 공학 교육 시맨틱 백과사전 국가를 통치하는 방법 로봇 공학의 법칙 내 모델 중 일부 +79055453610 89055453610 robotsoldier@yandex.ru vk.com/cybersuit facebook.com/institutrobotov t.me/institutrobotov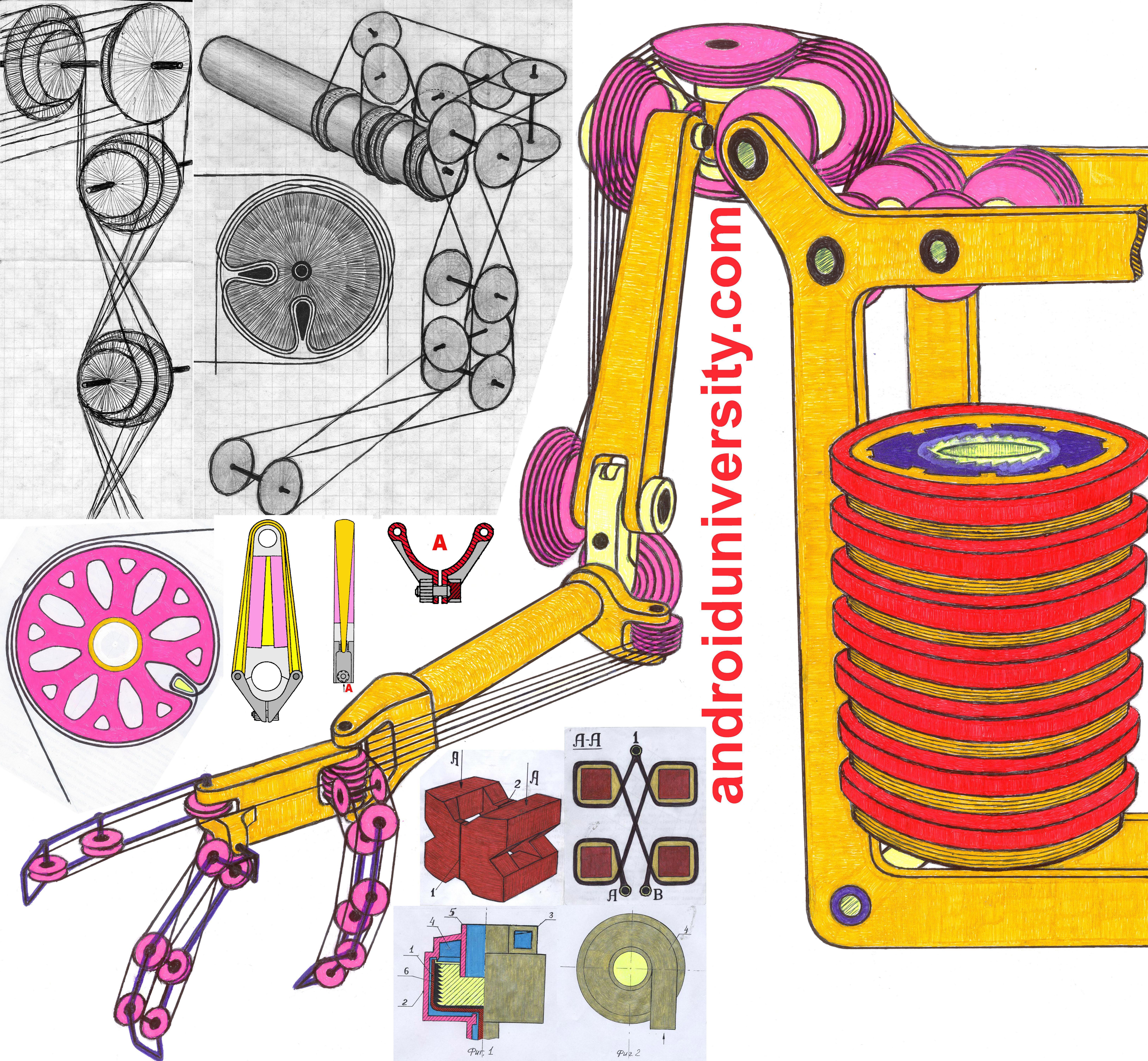 .
.
11.03.2023
사람은 무게 중심과 지지대를 통과하는 수직선에서 제로 위치로 균형 알고리즘에 따라 걷고 달립니다. 사람의 걷기와 달리기의 안정성 균형을 맞추는 알고리즘은 몸통 움직임의 가속도에 따라 작동합니다. 로컬 수직에서 안드로이드의 질량 중심 위치, 균형 피드백은 3D 짐벌 운영자에게 제공됩니다.
배낭은 안드로이드의 질량 중심 위치를 변경했습니다. 작업자의 설정이 수직으로 부드럽게 이동되었으며, 고관절의 상부 관절과 어깨 관절의 각도, 카메라 각도의 작동 범위가 변경되었습니다. 각도.
텔레프레즌스와 가상 현실은 수십억 개의 원격 작업으로 인구 고령화 문제를 해결하고 대륙 간 송금 건수를 수십억 배로 늘릴 것입니다.
2035년 이후에는 전 세계 산업 회전율의 30%가 텔레프레즌스 슈트와 가상 현실의 생산이며, 또 다른 20%는 안드로이드의 생산입니다. 이동 수단과 전화를 대체할 수 있는 텔레프레즌스 슈트의 능력은 그것을 대량 상품으로 만들 것입니다. 아바타를 운전함으로써 사람은 스스로 일할 때보다 덜 피곤해집니다. 아바타는 더 강하고 오래갑니다.
TELEPRESENCE SUIT 프로젝트는 MANHATTAN 프로젝트(핵무기)보다 더 세상을 바꿀 것입니다. 텔레프레즌스 수트의 도움을 받는 비즈니스는 수 킬로미터의 해저 자원, 행성 및 소행성의 자원을 마스터하게 됩니다. 저는 전 세계적인 독점 기업입니다. 저는 텔레프레즌스 슈트와 관련하여 기성품 비특허 핵심 발명품의 99%를 보유하고 있습니다.
우주 사업은 지구보다 10억 배 더 많은 것을 생산할 것입니다. 완제품을 제공하는 로봇 우주 산업인 우주 자원은 다른 행성인 소행성에 도시를 만들 것입니다.
텔레프레즌스 슈트는 화성, 달의 자립 가능한 거주 기지에서 유일하게 누락된 기술입니다. 위성 셀룰러 통신은 화성, 달 어디에서나 원격 제어 안드로이드의 24시간 작동을 보장합니다.
질화티타늄 및 기타 초경질 코팅으로 코팅된 안드로이드는 화성, 달에서 5년의 자원을 갖게 됩니다. 연마 먼지로 인해 화성, 달의 식민지 개척자의 우주복은 2주의 안전 자원을 갖습니다.
Elon Musk의 화성 식민지는 대량의 우주복 생산으로 인해 폐허가 될 것입니다. 무중력 상태에서 느린 작업을 위한 NASA 우주복은 $12,000,000입니다. 화성에서 정상적인 속도로 작업하기 위한 우주복인 달은 생명 유지 시스템의 세 배의 힘, 더 비싼 장갑, 위성 통신 및 내비게이션 시스템으로 인해 더 비쌉니다.
화성을 위한 액체 연료의 직렬 안드로이드는 $20,000, 직렬 텔레프레즌스 소송은 $70,000이며 5년 동안 작동하며 하루에 2교대로 작동합니다. 위성 셀룰러 통신을 갖춘 텔레프레즌스 수트가 없으면 화성에 자치 기지를 만드는 것은 불가능합니다.
우주선 원심 분리기의 텔레프레즌스 슈트는 행성의 무역 고속도로 뒤에 있는 주요 기술입니다. 행성의 소행성, 혜성 및 위성의 고속도로, 연료, 예비 부품, 컨테이너 + 우주선에서 기지의 안드로이드를 제어하기 위한 통신 회선 네트워크가 있는 황량한 무역 기지. 소프트웨어는 2차 그래프(수직에 더 가까움 - 더 큰 계수)에 따라 안드로이드 드라이브의 이득을 자기 부츠의 지지 표면의 수직으로 조정합니다.
텔레프레즌스 수트는 조종사, 유조선, 저격수, 기관총 사수, 백병전 군인, 굴삭기, 용접공, 분쇄기, 그라인더를 위한 보편적인 가정 훈련 시뮬레이터입니다.
텔레프레즌스 슈트는 지상 및 수중 드론, 굴삭기, 불도저 및 모든 장비의 원격 제어 운영자에게 모든 100% 정보 채널을 제공합니다. 운영자는 작동 중인 실제 제어 장치와 구별할 수 없는 가상 제어 장치(콘솔)에서 모든 장비를 제어합니다.
텔레프레즌스 수트(메타버스에 들어가기 위한 수트, 텔레프레즌스의 외골격 인터페이스, 아바타의 외골격 인터페이스)에서 사람은 팔과 다리의 외골격의 파워 센서를 누른다. 드라이브를 켠 센서는 사람에게서 도망쳐 그의 힘을 무효화하고 안드로이드의 팔 (다리)을 "안드로이드 팔의 각도-인간 팔의 각도"차이의 임계 값으로 이동합니다. 외골격의 추진력은 사람의 힘이 외부 환경보다 약한 경우 사람의 외부 환경에 의해 제어됩니다.
센서 쌍의 힘의 차이는 작습니다. 알고리즘은 진동을 약화시킵니다. 차이가 작을수록 구동 속도가 낮아집니다.
외골격 무게 및 관성 보상 시스템
텔레프레전스 수트에서 외골격의 각 위치(3D 짐벌의 각도 및 외골격의 모든 경첩)에 있는 외골격의 각 경첩은 중력에 의해 생성된 불균형 모멘트의 영향을 받습니다. 외골격 힌지 각도의 모든 조합에 대한 이러한 모멘트는 결정 테이블에 기록됩니다.
결정 테이블에 따르면 소프트 드라이브는 외골격의 이러한 경첩에 모멘트를 적용하여 외골격에 대한 중력 효과의 균형을 맞춥니다. 운영자는 소프트웨어 인터페이스에서 결정 테이블 수치의 백분율 계수를 지정할 수 있습니다.
외골격의 관성은 경첩에서 멀리 떨어진 팔과 다리의 외골격 지점에서 가속 센서가 있는 드라이브의 피드백으로 보상됩니다. "가속 - 드라이브 케이블에 가해지는 추가 백분율 힘" 표에 따른 보상. 운영자는 설정에서 테이블의 수치를 지정할 수 있습니다.
OPTION-2: 케이블을 통한 팔과 다리의 외골격 경첩의 중력으로 인한 모멘트는 스프링에 의해 140% 균형을 이룹니다. 이 40%(케이블의 토크 또는 힘 센서에 따라)가 사람에게 작용하지 않도록 드라이브 토크로 소프트웨어에 의해 보상됩니다. 스프링은 팔과 다리가 중력에 대항하여 움직일 때 액추에이터의 속도를 높입니다.
OPTION-3: 팔과 다리의 외골격 무게는 스프링에 의해 보상됩니다. 팔과 다리가 수직이 되도록 합니다. 가변(사인 함수) 반경의 풀리에 의한 팔 외골격의 스프링 케이블 무게 보상.
팔과 다리의 외골격 무게는 풀리의 공통 축에 있는 2축(수직에서 2축) 힘 센서의 출력 수치 K에 따라 드라이브에 의해 보상되며, 드라이브는 평행 갑피를 당깁니다. 도르래 케이블의 아래쪽 가지의 힘을 수직 통과에서 팔 (다리)의 중심 질량 편차 각도의 코사인을 곱한 숫자 K로 풀리 케이블의 아래쪽 가지의 힘을 초과하는 힘을 가진 풀리 케이블의 가지 외골격의 경첩을 통해.
외골격의 관성은 Newton의 법칙-2 F=ma에 따라 ("관성 - 힘" 표에 의해) 보상됩니다. 질량-m 대신에 "케이블 - 수직" 각도의 코사인을 곱한 숫자 K를 대체하고 드라이브가 질량, 관성을 보상하는 풀리 케이블의 상단 분기의 최종 힘을 얻습니다. 외골격.
3D 짐벌을 장착한 외골격의 관성모멘트는 "인간 + 외골격 + 3D 짐벌"의 관성모멘트와 사람이 없는 경우의 관성모멘트의 차이로 드라이브에 의해 "팔의 위치, 외골격의 다리 – 관성 모멘트”. 토크 차이 - 클러치 전류의 강도에 따라 "각 가속도 - 전류 강도"표에 따라.
ANDROID CONTROL DELAY는 운영자가 안드로이드에 신호를 보낼 때 텔레프레즌스 수트 드라이브의 지연 시간 + 통신 회선을 통해 안드로이드에 신호 전송 시간 + 안드로이드 드라이브가 운영자의 신호를 처리하기 위한 지연 시간 + 통신 회선을 통해 안드로이드에서 운영자에게 완료된 움직임에 대한 신호를 전송하는 시간 + 안드로이드에서 드라이브 신호 텔레프레즌스 슈트에 의해 처리되는 지연 시간.
안드로이드 제어 지연은 한 방향으로 신호 전송 시간의 두 배 + 텔레프레즌스 수트 액추에이터 작동 시간의 두 배 + 안드로이드 액추에이터에 의한 신호 처리 시간과 같습니다.
텔레프레즌스 수트에서 안드로이드까지 6000km에서 피드백의 레이저 신호(무선 신호)가 2번 통과하는 총 시간은 0.04초 + 텔레프레즌스 수트 액추에이터의 2개 지연(각각 0.02초) + 0.02초의 안드로이드 액추에이터: 안드로이드 제어 지연은 0.1초입니다. 인간 뇌의 반응 ~ 0.1초: 10Hz 평균 주파수(뇌의 알파 리듬)의 뇌에 의한 비례력 바이오센서의 심문, 인간 근육의 신장.
운영자는 "예측" 모드의 제어 지연을 줄일 수 있습니다. 팔과 다리의 궤적을 따라 각속도, 힘의 성장 속도를 변경하여 소프트웨어가 텔레프레즌스 슈트인 안드로이드의 드라이브를 전진시킵니다.
Soft-Driver는 신호보다 몇 배 더 강한 케이블을 날카롭게 당긴 다음 움직이지 않습니다. 케이블은 길이의 탄성 수축을 움직입니다. 이는 제어 지연, 백래시로 인한 간섭을 줄입니다.
ANDROID-OPERATOR 상호 운동학의 조정
텔레프레즌스 수트의 피드백 신호는 백분율 형식으로 모든 각도를 전송합니다. 100% - 표준 영점을 갖는 표준 조작기 각도 범위, 조작기 이동의 끝점. 문제가 사라집니다. 작업자 손의 외골격이 완전히 펴지고 안드로이드 손이 아직 없습니다.
소프트웨어는 조작자의 외골격 손과 발의 백분율 각도를 안드로이드의 손과 발의 백분율 각도로 조정합니다. 피팅 각도에 대한 테이블, 손 터치는 텔레프레즌스 슈트의 좌표계에서 수직 및 수평으로 2mm의 좌표 단계를 갖습니다. 테이블은 피드백 신호를 조정합니다. 운영자는 개인 설정을 유지하면서 테이블을 수정할 수 있습니다.
조작자의 손(다리)의 좌표 기반은 안드로이드의 손(다리)가 작업자의 손(다리)보다 조금 더일찍 터치하고 소프트웨어에 원칙에 의해 조정됩니다. 조작자는 손가락, 손, 발(대호병, 외과의사)에 대해 이 즉각적인의 값을 개별적으로 설정합니다.
팔 외골격(다리)의 각도(좌표)
텔레프레즌스 수트의 팔(다리) 외골격에 있는 각도 센서는 LED 거리 센서를 복제합니다. 팔 (다리) 외골격의 주요 측정 지점의 각도와 좌표는 LED의 자외선 펄스 비행 시간에서 팔과 다리 외골격의 광전지까지 소프트웨어에 의해 계산됩니다. 광전지에는 간섭으로부터 보호하기 위한 광학 필터가 있고 LED에는 조광기가 있습니다.
LED 좌표 - 최대 3개의 간격을 둔 광전지에서 펄스의 비행 시간에서 LED에 의한 펄스 방출 지연에서 광전지에 의한 펄스 수신 지연을 뺀 값입니다.
자외선(간섭이 없음) 거리 센서는 "케이블 장력 - 케이블 이동 - 팔(다리) 각도" 테이블, 팔(다리) 외골격의 측정 지점 좌표 테이블을 보정합니다. 펄스를 방출하는 자외선 발광 다이오드에는 팔, 다리의 클램핑 프레임 경첩이 있습니다.
오른쪽, 벨트 전면 왼쪽, 위쪽 팔꿈치 관절 아래에 있는 몸통 클램프 프레임의 광전지 2개. 오른쪽, 벨트 뒤 왼쪽, 팔꿈치 드라이브 외골격의 상단 경첩 아래에 있는 몸통 클램핑 프레임의 광전지 2개.
어깨 드라이브의 오른쪽, 왼쪽 외골격에 있는 앞쪽 몸통 클램핑 프레임의 광전지 2개. 오른쪽 상단의 오른쪽 허벅지 클램프 프레임에는 상반신 클램프 프레임 벨트의 오른쪽 광전지를 위한 전면과 후면에 2개의 UV LED가 있습니다.
오른쪽 아래에서 앞쪽 오른쪽 허벅지의 클램프 프레임에 몸통 클램프 프레임의 전면 허리 광전지 용 자외선 LED. 오른쪽 아래 다리의 클램핑 프레임에서 오른쪽 아래부터 상체 클램핑 프레임의 오른쪽 허리 광전지용 자외선 LED.
오른쪽 오른발 클램프 프레임의 발가락 부분에는 다리 아래쪽 클램프 프레임 오른쪽의 광전지용 자외선 LED가 있습니다. 자외선 LED는 고주파에서 교대로 펄스를 방출합니다.
손가락에는 LED 거리 센서가 없고 각도 센서만 있습니다. 엄지 손가락과 집게 손가락의 손바닥 경첩에 연결된 손 클램핑 프레임의 좌표계에서 손바닥 뒷면까지의 손 손가락 좌표.
작업자를 위한 모드 설정: 소프트웨어는 작업자의 손과 발을 독립적으로 움직여 작업자의 손과 발의 표준 접촉 지점을 파일에 기록합니다. 팔, 다리, 몸통 길이. 운영자는 메타버스 사이트에 개인 설정 파일을 작성합니다.
ARM EXOSKELETON 팔 측면에는 구동 외골격과 센서 외골격으로 구성되어 있습니다.
드라이브의 외골격은 사람의 팔보다 길고 그룹 드라이브 모듈에서 오는 케이블이 있는 도르래가 있으며 EXOSKELETON WEIGHT COMPENSATION, INERTIA SYSTEM에 연결됩니다.
센서 외골격은 조작자의 손과 구동 외골격 사이에 위치합니다. 감각 외골격에는 힘과 각도 센서가 있습니다.
감각 외골격은 나사 드라이브가 있는 힘 센서의 수에 따라 작업자를 위해 팔뚝, 팔꿈치, 손의 클램핑 프레임 길이를 설정합니다. 힘 센서의 수에 따라 나사 드라이브는 어깨 너비, 몸통 클램핑 프레임 길이를 설정합니다. 힘 센서는 3중 복제됩니다.
드라이브의 외골격과 센서의 외골격은 단단한 파이프 축-1에 의해 손목을 통해 서로 연결됩니다. Axis-1은 센서 외골격의 팔꿈치 하부에 견고하게 연결되어 있습니다. 시작 위치의 Axis-1은 수평이며 조작자로부터 옆으로 향합니다. Axis-1은 내부 축으로 길이 15cm, 직경 2.5cm의 단단한 튜브입니다.
축-1의 외부 튜브-1-2는 구동 외골격의 팔꿈치 하부에 견고하게 연결되어 있습니다. Axis-1은 tube-1(사람에게 더 가까운)과 tube-2 내부에서 회전합니다.
튜브-1과 축-1 사이에서 센서 외골격에 포함된 손가락과 손바닥 외골격의 케이블 드라이브 풀리의 튜브 베어링이 회전합니다. 모든 차축과 튜브는 플레인 베어링입니다.
구동 외골격의 팔꿈치와 센서 외골격의 팔꿈치는 상호 자유도가 1개뿐이며, 보통 사람의 힘의 3배에 달하는 일정한 하중을 견디도록 설계되었습니다.
센서 외골격은 손의 모든 움직임, 팔꿈치의 모든 회전 및 가로 움직임을 드라이브 외골격에 견고하게 전달합니다. 센서 외골격의 팔꿈치와 팔뚝의 종방향 움직임은 드라이브 외골격의 팔꿈치와 팔뚝의 움직임과 일치하지 않습니다. 운영자는 다음과 같은 이유로 이것을 느끼지 않습니다.
1. 모든 피드백 각도는 센서 외골격에서만 발생합니다.
2. 안드로이드 암의 피드백 없이는 팔꿈치와 팔뚝의 자유도가 없습니다.
텔레프레즌스 수트를 입은 조작자의 시작 위치: 조작자는 허벅지의 클램프 프레임에 앉습니다. 그들은 힘 센서의 수에 따라 드라이브를 통해 허벅지와 다리의 클램핑 프레임 길이를 설정합니다. 뒷면은 수직입니다. 팔과 다리의 모든 관절은 관절을 따라 드라이브가 팔꿈치와 팔뚝의 클램핑 프레임의 길이를 설정하도록 90 ° 각도로 구부러진 수직면에 있습니다.
EX-글러브의 시작 위치
수직면에 손바닥, 손가락 앞으로. 손바닥의 뒷면은 서로를 향합니다. 손가락 1-2-3의 외골격은 앞으로 수평으로 확장됩니다. 동일한 수직면에 위치합니다.
Finger-1 - 집게 손가락. Finger-2는 가운데 손가락입니다. Finger-3은 약지입니다.
앞으로 뻗은 엄지손가락 외골격의 세로축은 앞으로 뻗은 다른 손가락의 외골격 세로축과 평행하다. 모든 손가락 외골격의 루트 힌지는 동일한 Plane-1에 있습니다. Plane-1은 앞으로 뻗은 모든 손가락의 외골격 세로축에 수직입니다.
손가락 사이의 거리 설정
작은 손가락에는 외골격이 없습니다. 손가락 외골격 클램핑 프레임의 골무에 손가락을 끼면 손가락이 팽팽함을 느낄 것입니다. 손가락 끝으로 손가락의 클램프 프레임을 옆으로 밀기 시작합니다.
손바닥 그립 프레임 너비 조정: 손가락 끝의 힘은 손가락 외골격의 골무에 있는 측면 압력 센서에 의해 감지됩니다. 그들의 신호는 검지의 클램핑 프레임, 가운데 손가락에서 약지가 옆으로 움직입니다.
오른쪽 손바닥 외골격의 바닥판에서 나사 드라이브는 왼쪽 앞판에서 오른쪽 뒷판과 함께 오른쪽 앞 손바닥 지지판을 밀어냅니다. 마찬가지로 왼손의 외골격에서도 마찬가지입니다.
이 드라이브에는 팜 클램핑 프레임 앞에 나사 샤프트-1이 있습니다. 나사 샤프트-1이 멈췄습니다. 드라이브가 고정 너트를 조여 샤프트가 틈과 탄성 없이 팜 클램핑 프레임과 단일 강체 부품을 형성합니다.
무게를 줄이기 위해 텔레프레즌스 슈트의 나사 드라이브에는 경질 초경 합금강으로 만든 파이프로 만든 나사가 있습니다. 파이프의 나사산은 다이아몬드 휠로 절단하고 티타늄 질화물로 다이아몬드 휠로 나사산 프로파일을 연마합니다.
나사 리드 각도를 줄이고 나사의 스러스트 표면을 증가시켜 효율성을 높이기 위해 가능한 최대 나사 직경의 직사각형 또는 스러스트 나사. 스레드의 스러스트 면은 효율성과 드라이브 수명을 최대화하기 위해 나사 축과 정확히 수직입니다.
클러치가 제어되는 플라이휠 전기 드라이브. 고속 플라이휠 전기 모터의 큰 관성은 드라이브의 기어비를 줄여 질량을 줄입니다.
가운데와 엄지손가락 사이의 거리는 엄지손가락의 뿌리 관절에서 후방 횡력 센서를 설정합니다.
손가락 외골격의 길이 설정
사람은 손끝으로 손가락 외골격의 골무를 누릅니다. 심블은 심블 힘 센서의 긴 스트로크 스프링에 있는 가이드를 따라 앞으로 이동합니다.
골무 힘 센서는 손바닥 외골격의 상판 평면에 대해 64°의 각도로 손가락 1-2-3의 부드러운 외골격을 구부립니다. 스크류 드라이브는 손가락 1-2-3의 외골격의 첫 번째 지골 길이를 줄입니다.
손가락의 첫 번째 지골-1-2-3은 인간 손가락의 뿌리 관절이 손바닥 외골격 상판의 힘 센서를 누를 때 짧아지는 것을 멈춥니다.
나머지 손가락 지골의 클램핑 프레임 길이를 조정하는 기능은 골무 힘 센서의 긴 스트로크 스프링 가이드를 따라 움직이는 골무에 의해 수행됩니다.
액추에이터는 측면 클램프로 핑거를 고정합니다.
가변 두께의 탄성 금속판으로 만든 THIMMING은 뒷면이 원통형인 세미콘 모양입니다. 세미 콘의 평평한 부분(손톱 상단)에는 중간에 세로로 잘린 부분이 있습니다. 골무의 원뿔 부분에는 측면 컷아웃이 있어 손가락을 클램핑할 때 탄성 측면 꽃잎이 있는 골무가 손가락 모양을 더 정확하게 반복합니다.
손톱 끝 부분에서 골무는 손가락 끝을 문지르지 않도록 손가락에 닿지 않습니다. 골무의 양면이 오목한 반원형 표면이 손가락 끝에 접해 있습니다.
골무의 원통형 뒷면에는 이중 측면 힘 센서가 내부에 있습니다. 골무의 원통형 후면 부분이 있는 드라이브는 사람의 손가락을 측면 힘 센서의 힘 임계값에 고정합니다.
EXOGLOVE의 손바닥 길이 설정
<
이 드라이브는 엄지손가락의 외골격을 손바닥 평면에 대해 가로 각도 90°, 세로 각도 64°로 구부립니다. 엄지손가락의 외골격은 곧게 유지됩니다.
사람 엄지손가락의 뿌리 관절은 팜 클램프 프레임의 상단 플레이트에 있는 힘 센서를 누릅니다. 힘 센서는 팜 클램프 프레임의 길이를 설정합니다.
팜 클램프 프레임의 길이를 설정한 후 스크류 드라이브는 손바닥 외골격의 바닥판으로 손등을 고정합니다. 90 ° 각도로 회전합니다. 밑판에는 엄지 손가락을 위한 컷아웃이 있습니다.
외장갑의 시작 위치에서 손바닥 외골격의 아래쪽 판은 외장갑 아래의 수평면에 있습니다. 엄지의 외골격은 외골격 장갑 위에 있습니다.
손바닥 외골격의 아래쪽 판은 손바닥 앞의 삼각형으로 같은 평면에 위치한 지지판 -1-2, 엄지 쪽 손바닥 뒤에있는 판 -3으로 구성됩니다.
Exo-Glove 손바닥 길이 조정 - 스크루 드라이브가 뒷판을 앞판에 더 가깝게 이동시킵니다.
균일한 압력의 체인 클램프는 손바닥의 세로축에 대해 -1-2 각도로 손목의 손바닥 양쪽에 고정됩니다. 각 체인 클램프에는 루트 피벗과 두 개의 스프링이 있습니다. 시작 위치에서 스프링은 일반인의 해부학 수치에 따라 각도 1-2를 유지합니다. 그런 다음 힌지 스프링이 사람의 손바닥에 대해 각도 1-2를 조정합니다.
가운데 손가락의 뿌리 경첩 축, 손바닥 외골격의 아래쪽 판 표면은 Metaverse 프로그래머의 손 좌표계의 기반입니다.
손가락의 길이와 직경, 손가락 사이의 거리에 대한 엑소 장갑의 조정으로 드라이브가 3초 안에 부드럽게 작동합니다.
고 모듈러스 고강도 합금강으로 만든 Exo-glove 클램핑 프레임. 엑소 글러브의 디자인은 다른 손이나 다리에 닿지 않습니다.
팔꿈치 외골격 길이 설정
드라이브는 손바닥 클램핑 프레임을 팔꿈치의 세로축에 대해 64° 각도로 구부립니다. 팔꿈치는 90° 굽힘. 아래 팔뚝 관절 뒤에 있는 힘 센서의 숫자를 기반으로 드라이브는 팔꿈치 클램프 프레임의 길이를 설정합니다. 드라이브는 팔꿈치를 위쪽 관절에서 고정합니다.
아래쪽 팔꿈치 관절의 클램프는 필요하지 않습니다. 그 기능은 손바닥 클램프와 3D 손바닥 경첩을 아래 팔뚝 관절의 클램프 프레임에 연결하는 당김 막대에 의해 수행됩니다.
클램핑 프레임은 하부 조인트에서만 팔뚝을 고정합니다. 상부 조인트의 클램프는 필요하지 않습니다. 그 기능은 센서 외골격의 어깨 경첩과 몸통의 클램핑 프레임에 의해 수행됩니다.
팔뚝의 클램핑 프레임은 센서 외골격 팔뚝의 세로 축에 수직인 축에서 최대 4°까지 자유롭게 회전할 수 있습니다.
표준에 따르면 외골격은 작업자의 손을 수직에서 45° 각도로 뒤로 잡아야 합니다.
EXO-GLOVE 촉각-파워
각 엑소 장갑에 대해 12개의 전원 케이블이 그룹 드라이브에서 어깨 너머로 도르래를 따라 이동합니다. 그들은 초고속이며 각 손가락에 20kg의 힘을줍니다. 엑소 글러브 내부에는 손가락의 측면 이동을 위한 저전력 드라이브가 있습니다.
엑소 장갑의 디자인은 단단합니다. 어떤 방향으로든 60kg의 힘을 가해도 눈에 띄는 탄성 변형이 없습니다.
텔레프레즌스 수트의 RIGIDITY는 "고치" 기술을 사용하여 단방향 섬유로 만든 부품으로 보장됩니다. "고치" 기술은 정확히 힘의 선을 따라 단단한 발포금석발에 초경 탄소 섬유를 감는 것입니다. 텔레프레즌스 수트의 디테일 대부분을 압축과 신축 외에는 섬유에 가해지는 부하가 없다는 원칙에 따라 디자인했습니다.
초경 섬유는 섬유의 측면 박리 하중을 제거하는 스페이서를 통해 금속 또는 탄소 섬유 관형 부싱으로 하중을 전달합니다. 탄소 섬유 구조는 코쿤 단방향 탄소 섬유에 비해 초경량 구조에서 강성이 낮기 때문에 그 수가 적습니다. 발포금석에 고치에는 내부에 케이블, 케이블용 구멍이 있습니다.
텔레프레즌스 수트의 힘 범위는 평균 체중 남성의 전력 범위보다 약간 더 큽니다.
손가락의 전원 케이블을 구동하기 위한 도르래가 있는 샤프트-1은 수평면과 평행한 손바닥의 외골격 중간 위를 가로질러 통과합니다. 메커니즘을 통한 도르래의 케이블은 손가락의 외골격으로 직접 연결됩니다. 고정축-1은 손바닥(손)의 클램핑 프레임에 부착되어 손바닥의 윗면에 눌려진다.
손의 클램핑 프레임에서 샤프트-1은 손가락의 전원 케이블용 도르래가 있는 3D 힌지를 통해 팔꿈치의 클램핑 프레임에 연결됩니다. 3D 힌지는 손바닥의 모든 자유도를 제공합니다.
3D HAND Gimbal: 3D 핸드 짐벌 축 중 하나가 90° 회전하면 3D 짐벌의 자유도 중 하나가 손실되어 3D 짐벌 축의 특정 위치에서 차단됩니다. 손의 3차원 짐벌의 자유도 중 어느 하나라도 잃지 않으려면 각도-L1이 손의 3차원 짐벌을 구동하여 "각도-L1" 표에 따라 각도-L2-L3를 제어하는 것으로 충분하다. - 각도-L2 - 각도-L3".
Angle-L1 – 손에 가장 가까운 3D 짐벌 축의 회전 각도.
Angle-L2 – 브러시에서 3D 짐벌의 두 번째 축 회전 각도.
Angle-L3 – 손에서 3D 짐벌의 세 번째 축 회전 각도.
스프링 메커니즘과 함께 손의 클램핑 프레임과 팔꿈치 상부의 클램핑 프레임을 피벗 방식으로 연결하는 Rod-1은 모든 움직임 중에 동일한 거리를 보장합니다. Traction-2 팔꿈치 상부의 클램핑 프레임은 센서 암 외골격의 주 동력 프레임 팔꿈치 상부에 피벗 가능하게 연결됩니다.
스프링 메커니즘과 함께 팔뚝 하부의 클램핑 프레임과 어깨에 있는 몸통의 클램핑 프레임을 피벗식으로 연결하는 Rod-3은 어떤 움직임에도 동일한 거리를 보장합니다. Traction-4의 팔뚝 하부의 클램핑 프레임은 팔 외골격의 주 동력 프레임의 팔꿈치 상부에 피벗 가능하게 연결됩니다. 상부 팔꿈치 클램프 프레임과 하부 팔뚝 클램프 프레임 사이에는 직접적인 관절이 없습니다.
Rods-1-2-3-4에는 팔 외골격의 클램핑 프레임 길이를 사용자의 ROI이다.
3D 진동 센서: 안드로이드 손바닥 중앙에는 매우 민감한 진동 센서가 있습니다. 운영자는 채널 D를 통해 안드로이드 손바닥을 바닥에 대고 진동과 그 벡터를 통해 기계의 엔진이 작동하는지 여부를 결정합니다. 자동차가 도로를 따라 운전하는지 여부, 운전하는 방향, 짐을 실을 때 무게가 얼마나 되는지. 소프트웨어는 자동차 서스펜션 유형, 자동차 휠베이스의 길이, 너비를 결정합니다.
별도의 채널 D가 있는 손바닥의 외골격 중앙에 있는 조작자의 3D-진동기는 조작자에게 안드로이드의 3D 진동 센서에 작용하는 진동의 진폭, 주파수, 벡터를 제공합니다. Channel-D는 운영자에게 안드로이드 손가락의 촉각 채널보다 더 많은 비트 깊이, 진폭 및 주파수 범위를 제공합니다.
3D 진동기의 진동은 작업자에게 안드로이드의 손에 있는 하중의 무게를 알려줍니다. 더 많은 주파수 - 더 많은 무게.
사람, 안드로이드, 텔레프레즌스 수트에서 두 개의 케이블 또는 막대가 각 손가락의 마지막 두 지골을 구부리거나 구부립니다. + 두 개의 케이블 또는 막대가 손바닥에서 손가락의 첫 번째 지골을 구부리거나 구부립니다. 느린 드라이브가 있는 추가 케이블(스러스트)은 손가락을 좌우로 움직입니다.
엑소힘 및 촉각 피드백 신호,글러브에 대한 에너지 공급 - 손 바닥에 있는 3D 짐벌(전원 케이블용 도르래 포함)의 축 내부에 있는 3개의 회전 변압기를 통해. 또는 3D 짐벌 축 내부의 코일 동축 케이블을 통해.
EX-GLOVE 핑거 클램프의 힘은 다음 원칙에 따라 Z 센서(손가락 끝에 작용하는 힘 측정)가 있는 피드백 케이블에 의해 조정됩니다.
1. Z-센서의 힘(손가락 끝의 세로 축을 따라)은 일정합니다. Z-센서 드라이브는 Z-센서 힘의 상한 또는 하한 임계값을 초과하는 전환을 켜고 역전이를 끕니다.
2. 드라이브는 공통 케이블인 풀리를 통해 센서-Z의 신호에 의해 핑거의 측면 클램프의 클램핑력을 일정하게 유지합니다.
3. 손가락이 닿으면 드라이브가 Z 센서를 끕니다. 일반적인 케이블인 도르래를 통해 횡력을 포착합니다. 센서 Z 드라이브를 끄지 않았습니다. 손가락 사이의 제로 각도 차이 신호를 끕니다.
4. 전문가용 엑소 글러브에서는 추가 힘 센서가 Z 센서(공통 드라이브, 케이블 없음)에 관계없이 손가락 측면 그립의 누르는 힘을 보정합니다(작동자 설정: 알고리즘 선택).
심블 파워 드라이브:
1. 센서-SP는 손가락의 세로축에 대해 안드로이드 손가락 패드에 수직인 힘을 조작자에게 전달합니다. 안드로이드 센서-SP는 운전자의 골무를 손가락의 외골격에서 (손가락 끝의 유연성에 따라 최대 4mm 길이까지) 통신선 위로 드라이브-SP에 의해 위로 이동시킵니다.
2. sensor-P는 안드로이드 손가락의 세로축을 따라 작용하는 힘을 조작자에게 전달합니다. 드라이브-P가 있는 통신 회선을 따라 있는 안드로이드의 센서-P는 손바닥을 향해 손가락의 세로축을 따라 작업자의 골무를 이동합니다(손가락 끝에 따라 최대 4mm).
3. Sensor-BS는 조작자에게 안드로이드 손가락의 횡력을 전달합니다. sensor-BS는 drive-BS와의 통신선을 통해 작업자의 골무를 손가락의 외골격 측면으로 이동시킵니다(손가락 끝의 컴플라이언스에 따라 최대 3mm 길이).
클러치가 제어되는 골무 동력 플라이휠 그룹 전기 드라이브는 손가락의 외골격 끝에 있습니다. 손가락 외골격에는 무게와 관성을 보상하는 시스템이 있습니다.
촉감 골무는 안드로이드 손가락의 촉각 감각을 사람에게 전달하는 손가락 끝에 대한 촉각 픽셀 전극의 매트릭스를 가지고 있습니다. Android의 촉각 픽셀은 전력, 열 흐름을 전송합니다. Sapper는 열 흐름의 그림 인 기호로 재료를 결정합니다. 온도 변화율과 매질의 온도에 따른 열 흐름의 부호.
픽셀 온도: Peltier 효과로 인해(텔루륨 + 비스무트가 주변 온도보다 72°C 아래로 냉각됨). 텔루륨 + 비스무트 연결의 극성을 변경하여 온도 피드백 신호가 촉각 픽셀을 가열하거나 냉각합니다.
Sappers의 Exo-gloves: 향상된 촉각, 열 해상도의 매트릭스. 엑소 장갑은 퀵 릴리스 스프링 웨지 잠금장치(관성 3D 밸런싱 포함)로 텔레프레즌스 슈트에 연결됩니다.
힘, 온도, 열 흐름의 촉각 픽셀의 증폭 수준은 텔레프레즌스 수트의 가상 제어 시스템에서 가상 휠을 사용하여 작업자가 설정합니다. 바퀴는 직경, 표면 지형이 다릅니다.
깨지기 쉬운 물체 다루기: 조작자는 힘 피드백보다 촉각 피드백을 우선시합니다. 우선 순위는 전원 임계값에 의해 제한됩니다.
촉각 픽셀에 의한 약한 힘 범위의 시뮬레이션
촉각 픽셀에서 힘의 정확한 전달은 픽셀 이상의 임계 힘-K 수치에서 시작하는 손가락 액추에이터에 의해 제공됩니다. 12핀 드라이브 케이블에서 힘의 균형을 변경하는 복잡한 프로세스는 기생 힘 변동을 만듭니다. 그들은 장갑을 낀 작은 손가락을 거부함으로써 약해졌습니다.
공병이나 외과 의사의 약한 힘 범위(force-K 미만)는 촉각 픽셀의 진동을 시뮬레이션합니다. 진폭, 진동 주파수를 변경하는 알고리즘은 작업자가 선택합니다.
힘의 수가 아니라 그 변화를 진동 주파수로 보고하는 알고리즘이 있습니다. 힘 변화의 신호는 급격하게 상승하고 완만하게 하강하는 파동을 가진 임펄스에 의해 전달됩니다.
조작자에게 안드로이드의 손가락으로 느껴지는 표면의 기복, 촉각 골무의 촉각 픽셀-전극 매트릭스가 전송됩니다.
역방향 전기 진동:
1. 급격하게 상승했다가 서서히 하강하는 맥동 전극 전압이 피부에 부풀어 오르는 느낌
2. 천천히 상승, 급격하게 떨어지는 맥동 텐션이 피부에 오목한 느낌
안드로이드 손가락
다양한 정도의 부드러움, 촉각적 해상도 및 감도를 가진 촉각 골무가 틈 없는 고정으로 안드로이드의 손가락 끝에 놓입니다. 안드로이드는 골무를 가지고 다니며 운영자의 도움을 받아 교체합니다.
옵션-1: 탄성 마찰층이 있는 골무, 부드러운 촉감 매트릭스.
옵션-2: 마찰 노치가 있는 경질 합금 골무, 경질 촉각 매트릭스(내 발명품).
안드로이드 골무의 촉각 매트릭스는 촉각 피드백 케이블에 자기 또는 전기 커넥터로 연결됩니다. 촉각 매트릭스가 없는 골무는 특별한 모양, 기능 및 메커니즘을 가지고 있습니다. 골무는 재료의 초음파 용접 및 연삭을 수행하는 골무의 초경질 접촉 표면이 있는 초음파 드라이브를 가질 수 있습니다.
안드로이드 핸드 드라이브 소프트웨어는 표면을 잡거나 놓을 때 손가락 센서의 힘 값을 균등화합니다. 시술자가 0.1초 이상의 노력으로 별도의 손가락을 강화할 때까지(운영자가 알고리즘을 설정함).
안드로이드는 손가락으로 물체를 압착합니다. 조작자의 손가락에 있는 골무가 만졌습니다. 조작자의 손가락이 닫히면 안드로이드의 손가락은 아직 닫히지 않은 것입니다. 드라이브는 조작자의 엄지 외골격에 가해지는 힘과 같을 때까지 안드로이드의 엄지를 계속 움직입니다.
브러시를 사용한 표면 처리, 그리기 및 기타 작업을 위해 작업자는 안드로이드에서 "압력 제한" 모드를 켤 수 있습니다. 운영자의 노력.
작업 종료 - 작업자가 빨간색 버튼을 누릅니다.
1. 텔레프레즌스 수트는 앉은(시작) 위치에 고정됩니다.
2. 클램프 프리 손가락, 손, 발
3. 구형 3D 스크린 스프링이 두 개의 가이드 파이프를 통과합니다.
RED SAFETY BUTTON은 작업자에게 안전한 신체 위치에서 작업자의 짐벌을 멈춥니다. 텔레프레즌스 수트 클램핑 프레임의 길이를 조정하기 위해 모든 나사의 너트 절반을 비상 해제합니다. 보안 기계는 텔레프레즌스 슈트의 컴퓨터인 인터넷을 즉시 끕니다. 작업자의 짐벌이 멈출 때까지 자동 안전 장치는 외골격 클램핑 프레임의 길이를 조정하기 위한 드라이브를 차단합니다.
아날로그 안전 스위치는 짐벌이 작업자 신체의 안전한 위치에 멈출 때까지 독립적인 안전 컴퓨터가 클램핑 프레임 길이 조정 너트의 절반을 여는 것을 방지합니다.
목의 토르소 클램프 프레임에 있는 스로트 마이크를 통한 빨간색 안전 버튼의 음성 제어. 후두음에서 신호가 없습니다. 독립 보안 컴퓨터가 텔레프레즌스 슈트를 끄고 화면에 메시지를 표시합니다. 보안 컴퓨터의 운영자는 빨간색 버튼 활성화 제스처를 설정할 수 있습니다.
각도 센서의 숫자를 기반으로 한 안전 컴퓨터는 손이 헬멧에 닿지 않도록 방지합니다.
팔 외골격의 외부 제한 스위치는 팔 외골격이 충돌한 표면을 향한 움직임을 비활성화합니다. 리미트 스위치는 알고리즘에 따라 작동하는 자외선 거리계에 의해 복제됩니다.
텔레프레즌스 수트의 액추에이터의 힘은 인간의 두 배입니다. 국가의 법률에 따르면:
1. 해커에 의해 해킹된 텔레프레즌스 슈트의 드라이브로부터 사람을 보호하기 위해 텔레프레즌스 슈트의 인터넷 및 소프트웨어와 물리적으로 분리된 팔과 다리의 각도에 대한 기계적 리미터를 설치하는 안정적인 시스템이 필요합니다.
2. 작동하는 텔레프레즌스 수트에서 기계적 정지 장치의 설정을 변경할 수 없는 기능은 의무 사항입니다.
3. 인터넷을 통해 허가되지 않은 사이트에서 텔레프레즌스 소송을 사용하는 것은 금지되어 있습니다(형법 조항). 라이선스 사이트에서는 중복 데이터 로거가 필요합니다(완전한 데이터 저장 실패는 형법 조항). 인터넷을 통한 서버리스 제어를 위해서는 텔레프레즌스 슈트에 주 라이선스가 있어야 합니다.
4. 텔레프레즌스 슈트의 피드백 신호를 암호화해야 합니다. 암호는 요청 시 승인된 주정부 서비스에 지체 없이 제공됩니다.
5. 텔레프레즌스 수트에서 안드로이드를 신속하게 분리할 수 있는 기회를 법 집행 기관에 제공하는 것은 의무입니다.
팔과 다리의 각도에 대한 기계적 리미터에는 무소음과 원활한 작동을 위해 프로그레시브 서스펜션과 고무 접촉판이 있습니다.
로봇 공병, 로봇 외과의:
1. 힘 센서, 각도의 더 많은 폴링 빈도
2. 작은 범위의 불일치 각도
3. 작은 범위의 각가속도
4. 각속도 계수 설정(스케일링: 각속도의 배수 감소)
5. 각속도, 각가속도 제한 설정
6. 각도 센서, 힘의 정확도 향상
7. 더 빠른 센서, 액추에이터
8. 케이블의 직경 및 장력 증가
9. 작은 힘의 설정 범위에서 감도 설정(작거나 음의 이득)
10. 부드러운 움직임, 연비 향상 및 제어 지연 감소를 위한 높은 구조적 강성
11. 로봇에서 작업자로의 동작 전달에서 힘 구배 증폭 계수 설정
12. 공병 로봇: 신호 장치가 트리거되는 표준(무게가 알려진) 광산 세부 사항의 무게 범위(수직 투영에서 측정) 설정: 손의 클램핑 프레임의 고주파 진동, 소리(음성) ) 화면의 신호 또는 텍스트
대형 조작기:
1. 힘 센서, 각도의 더 많은 폴링 빈도
2. 작은 범위의 불일치 각도
3. 작은 범위의 각가속도
4. 각도 센서, 힘의 정확도 향상
5. 각속도의 원활한 증가 - 매니퓰레이터의 흔들림 방지
6. 더 높은 구조적 강성 + 그리퍼에 가속도 센서가 있는 드라이브 피드백
7. 와이어 로프, 고음속 초경 재료 암은 암 스윙, 제어 지연을 감소시킵니다
8. 끝점에 접근하면 드라이브가 조기에 꺼집니다. 끝점은 매니퓰레이터의 탄력성, 케이블로 인해 달성됩니다
9. 매니퓰레이터의 끝을 움직일 때 드라이브는 매니퓰레이터에 횡파를 주어 "임펄스-변위" 테이블을 밀어냅니다. 강한 푸시-1은 매니퓰레이터의 끝을 옆으로 움직이고 역상에서 약한 푸시-2는 빌드업을 약화시킵니다. 동일한 방향으로 원활하게 이동하기 위해 주기가 반복됩니다. 이 임펄스 모드는 매니퓰레이터의 측면 이동의 최대 속도와 정확도를 제공하여 재료의 탄성력을 장애물에서 조수로 전환합니다.
10. 매니퓰레이터의 탄성변형은 그립에 있는 3차원 가속도 센서의 신호를 구동하여 보상한다.
드라이브 가속
1. 피드백 신호에 의해 구동되는 드라이브의 가속도는 마스터 드라이브의 가속도에 정비례합니다
2. 제어 지연이 길수록 피드백 신호에 의해 구동되는 드라이브의 가속이 커집니다. 가속 알고리즘은 작업자가 선택합니다.
피드백 신호 각도의 인접 레벨 사이에서 안드로이드(오퍼레이터) 손의 각도 진동은 다음과 같이 제거됩니다.
1. 안드로이드(오퍼레이터) 손 각도 센서에서 각도 분해능이 피드백 신호의 각도 분해능보다 큽니다.
2. 피드백 신호에서 최소 각도 단위의 경계를 넘은 후, 안드로이드(오퍼레이터) 핸드 센서에서 알고리즘 지연이 있는 드라이브는 피드백 신호가 다음 교차 명령을 내릴 때까지 이 경계에서 팔 각도를 정확하게 유지합니다. 피드백 신호의 최소 각도 단위.
트래픽이 충분하지 않습니다. 소프트웨어는 "트래픽 - 각도 해상도" 표에 따라 피드백의 각도 해상도를 줄입니다.
2Hz(기생 발진 필터 설정)보다 큰 신호 변동 강도 센서는 클러치 위상을 약화시킵니다. 이 소프트웨어는 음의 가속 신호에 양의 가속 신호보다 더 많은 증폭, 감쇠를 제공합니다: 게인 그래프 설정, 센서 감쇠.
운영자를 위한 알고리즘 설정:
1. 알고리즘 "작동자가 더 많은 가속도를 전달함 - 외부 환경에서 얻는 힘이 적음"(숫자는 작업자가 선택함)
2. 알고리즘 "작동자에 의해 전송되는 더 빠른 속도 - 외부 환경에서 더 적은 힘 획득"(숫자는 운영자가 선택함)
3. 알고리즘 "작업자와 환경의 힘은 한 방향으로 향합니다. 외부 환경의 힘이 클수록 이득이 낮아집니다"(숫자는 작업자가 선택함)
기본적으로(오퍼레이터 설정) 양방향의 약지 증폭 계수는 나머지 손가락보다 50% 더 큽니다. 텔레프레즌스 수트에는 작은 손가락이 없습니다. 안드로이드는 5개의 손가락을 가질 수 있지만 새끼손가락과 약지는 같은 방식으로 움직입니다. 외부에서는 보이지 않습니다.
텔레프레즌스 슈트는 트랜지스터 커플링 통합에 최적화되어 있습니다. 피드백 소프트웨어 "케이블의 강도 - 전자기 클러치"는 케이블의 장력을 일정하게 유지하고(케이블 자원의 증가) 텔레프레즌스 슈트의 탄성 변형을 선택하여 제어 지연을 줄입니다.
케이블의 탄성 변형, 텔레프레즌스 수트의 세부 사항은 "케이블의 강도 - 케이블 이동 - 각도" 표에 따라 각도 전송의 정확성을 방해하지 않습니다. 자동 케이블 텐셔너는 모든 케이블의 인장력을 일정하게 유지합니다.
텔레프레즌스 수트, 안드로이드의 케이블은 효율성을 높이고 제어 지연을 줄이기 위해 소리의 속도가 빠른 초경(스프링하지 않음)입니다. 케이블의 증가된 인장력은 물체의 형태, 표면의 구조에 대한 감각의 사실성을 증가시킵니다.
제어 지연 0.02초 있음
텔레프레즌스 슈트의 그룹 드라이브: 그룹 드라이브 풀리를 따라 42개의 케이블이 연결됩니다. 12개의 케이블이 각 팔 외골격에 연결됩니다. 14개의 케이블이 고관절 균형 장치와 외골격의 다리로 연결됩니다. 4개의 케이블은 안드로이드 본체에 작용하는 공간의 3축을 따라 운전자의 신체에 충격과 진동 선형 가속도를 전달하는 ACTIVE 3D SUSPENSION에만 작동합니다.
텔레프레즌스 수트에는 사람의 등 좌우에 반대 방향으로 회전하는 2개의 긴 전기 모터-플라이휠-1-2가 있습니다. 전기 모터-플라이휠의 축은 사람의 등뼈에 수직으로 가까운 사람의 척추 축과 평행합니다. 텔레프레즌스 수트의 플라이휠 전기 모터는 3상 권선 고정자 디스크가 고정된 회전 장축 D입니다. Disks-stators-DS의 직경은 1m입니다.
스타터의 고정식 3상 권선(플라이휠 전기 모터의 맨 끝에 있음)은 유도에 의해 플라이휠 전기 모터를 회전시킵니다. 플라이휠 모터의 권선에 유도된 전류는 정류기를 거쳐 플라이휠 모터의 D축 내부에 있는 DC 동축 케이블로 흐릅니다. 제어 신호에 따라 트랜지스터는 클러치 케이블에 연결됩니다.
클러치 - DS 고정자 디스크 외부에서 회전하는 구리 농형 로터. 농형 구리 로터는 롤러 베어링 VK와 드라이브 풀리 TT가 케이블용 2회전 나선형 트랙이 있는 디스크 M의 측면에 연결됩니다.
TT 도르래는 최대 3회 회전한 다음 시작 위치로 돌아갑니다. 당김 케이블의 Pulley-ТТ는 농형 구리 회전자 직경보다 ~10배 작은 직경을 가집니다. 케이블의 한쪽 끝은 TT 풀리에 고정되고 케이블의 두 번째 끝은 큰 직경의 종동 풀리에 연결됩니다.
드라이브 풀리는 길고 조용한 탄성 관형 롤러가 있는 케이지가 있는 단열 롤러 베어링 VK에서 회전합니다. 분리기에는 튜브형 롤러 내부를 통과하는 튜브로 연결된 두 개의 디스크가 있습니다.
전기 모터-플라이휠의 로터 풀리는 케이블에 적재될 때 회전 디스크-고정자 사이에 위치한 별도의 고정 프레임-RS에 장착된 롤러 베어링-L로 케이블을 당기는 반경 방향 힘을 감지합니다- 전기 모터 플라이휠의 DS. 두 개의 롤러 베어링 VK는 고정 프레임 RS에 고정된 관형 축 TO에서 회전합니다. 고정 프레임-RS는 축-D에 닿지 않습니다.
긴 축-D에서 케이블을 당기는 반경 방향 힘은 부하를 생성하지 않습니다. 로프의 모든 방사형 힘 하중은 고정 프레임-RS의 롤러 베어링-L에 의해 유지됩니다. 전기 모터-플라이휠의 로터 풀리는 장축-D와 정확히 정렬됩니다. 구동 풀리-TT에서 나온 풀 로프는 전동기-플라이휠의 회전 고정자 디스크-DS 사이를 통과하여 외부에서 종동 풀리로 들어간다. 구동 도르래에서 케이블은 텔레프레즌스 슈트 외골격의 팔과 다리로 이동합니다.
제어 신호에 의해 전기 모터-플라이휠에 클러치로 연결된 로터는 텔레프레즌스 수트의 팔과 다리 외골격 그룹 드라이브의 42개 케이블을 움직입니다.
클러치 모드에서 전기 모터-플라이휠의 고정자 디스크-DS의 권선은 정전류이지만 인접한 권선에서는 전류가 반대 방향입니다. 클러치가 작은 양의 토크를 생성하면 홀수 권선에 DC가 있습니다. 각 고른 권선은 신호 제어 에너지 재생 모드에서 작동합니다.
듀얼 모드 클러치
Drive Clutch 피드백 출력 각도의 95%는 최대 속도에서 정상적으로 수행됩니다. 크립 모드에서 나머지 5%는 피드백에서 샤프트를 정확하게 중지합니다. 자동 그룹 드라이브 케이블 장력 안정화로 클러치에서 발생하는 소음이 줄어듭니다.
액추에이터의 정밀도 + 속도
손, 손가락의 드라이브에서 정확성과 속도를 모두 결합하기 위해 드라이브의 2차 특성이 사용됩니다. 증가, 각도의 불일치 또는 힘 증가율. 다음과 같이 작동합니다.
1. 작은 힘 범위의 낮은 각속도 또는 작은 불일치 각도에서 작업자의 동작에 대한 드라이브 감도가 작습니다. 저속에서 손, 안드로이드 손가락의 작은 움직임에 대한 작업자의 힘이 크게 증가하기 때문에 움직임이 정확합니다. 이 모드에서는 작업자 외골격의 손가락 인 팔의 굴곡근과 신근의 드라이브에 큰 상호 저항이 있습니다. 마찬가지로, 안드로이드의 굴근 및 신근 드라이브는 부분적으로 역상으로 작동합니다.
2. 높은 각속도 또는 큰 불일치 각도에서 운전자의 행동에 대한 드라이브의 감도가 더 커집니다. 속도나 추진력을 높이기 위해 안드로이드의 손과 손가락의 움직임에 조작자의 힘을 약간 증가시키는 것이 사용됩니다. 이 모드에서 조작자의 외골격에 있는 굴근 및 신근 드라이브는 거의 제로 역위상에서 작동하여 외골격의 손과 손가락 움직임의 고속 및 강도를 달성합니다. Android Flexor 및 Extensor 드라이브는 유사하게 작동합니다. 이동 정확도가 감소합니다.
3. 힘 증가율이 높거나 힘이 크면 운전자의 행동에 대한 드라이브의 민감도가 더 커집니다. 속도나 추진력을 높이기 위해 안드로이드의 손과 손가락의 움직임에 조작자의 힘을 약간 증가시키는 것이 사용됩니다. 이 모드에서 굴근의 드라이브, 조작자의 외골격 신근은 거의 제로 역 위상으로 작동하여 외골격의 손과 손가락의 움직임의 고속과 강도를 달성합니다. 안드로이드의 굴근과 신근의 드라이브도 비슷하게 작동합니다.
전기 모터 플라이휠의 모든 권선에 대한 디지털 제어 신호는 전기 모터 플라이휠 끝에 있는 회전 변압기를 통해 전기 모터 플라이휠로 이동합니다.
옵션-2 플라이휠 모터 제어 신호: 디지털 플라이휠 제어 신호 대신 회전 변압기에서 플라이휠 모터의 각 권선은 발진 회로의 공진 주파수에서 자체 플라이휠 모터 제어 신호를 수신합니다.
클러치 제어 신호는 각 로터의 속도를 개별적으로 제어합니다. 각 전기 모터 플라이휠 외부에는 오른손(손 - 손가락 4개), 사람의 다리 및 ACTIVE 3D SUSPENSION의 외골격 케이블 21개를 움직이는 도르래가 있는 21개의 로터가 있습니다. 전기 모터 플라이휠의 동력은 하나의 케이블에 집중될 수 있습니다.
케이블의 부하가 감소하면 전기 모터 플라이휠의 케이블 힘 센서 신호에 따라 자기장이 뒤로 이동하여 로터와 케이블을 반대 방향으로 0 위치로 회전시킵니다. 전기 모터 플라이휠의 로터 직경이 1m이기 때문에 풀리에 큰 모멘트가 있습니다. 손 외골격의 강도는 굴근을 위해 작동하는 케이블의 절반과 손 외골격의 신근을 위해 작동하는 케이블의 절반으로 인해 큽니다. 손가락에는 짧은 스트로크, 긴 스트로크는 동일한 케이블의 어깨.
위성 간 전환으로 인한 신호 중단 방지: 병렬 연결 - 위성 A는 아직 신호 전송을 완료하지 않았고 위성 B는 피드백 신호를 복제하여 연결되었습니다.
피드백 신호가 중단되면 안드로이드는 손상을 최소화하기 위해 안드로이드에 필요한 조치 목록을 수행하는 신호 중단 알고리즘의 예외를 제외하고 일부 알고리즘의 작업과 신호의 이전 숫자를 저장합니다.
안드로이드가 불안정해지거나 피드백 신호가 중단되면 안드로이드는
알고리즘이 있는 ANDROID RESISTANCE SYSTEM:
1. 안드로이드 종방향 안정성 알고리즘 : 질량중심과 관성벡터에 따라 안드로이드 질량중심의 종방향 수직면에서 안드로이드 움직임의 안정성을 유지하고 별도의 하중 손바닥. 안드로이드의 걷기 및 달리기 매개변수(가속, 하강, 상승 설정)를 저장하고 작업자의 설정에 따라 정지합니다. 안드로이드의 머리와 손에 있는 카메라의 세로-수평 가속도를 제한합니다.
2. 안드로이드 측면 안정성 알고리즘: 안드로이드 질량 중심의 가로 수직면과 별도로 손바닥에 가해지는 하중의 움직임 안정성. 보행, 역기 들기에서 안드로이드의 옆으로 움직이는 양(가속에 대한 반응 설정, 경사진 보행면)을 제한합니다. 안드로이드의 머리와 손 카메라의 가로-수평 가속도를 제한합니다.
3. 수직 이동 알고리즘: 안드로이드 질량 중심의 수직 방향 움직임의 안정성과 별도로 손바닥에 가해지는 하중. Android 카메라를 수직으로 안정화하고 Android 헤드 및 손바닥 카메라의 수직 가속도를 제한합니다.
Android 저항 시스템의 오퍼레이터 설정:
1. 작업자는 "무게 중심 - 안드로이드 발의 순간적인 지지 중심" 선의 수직으로부터 앞뒤로 편차의 각속도를 설정하고, 이를 초과하고 신호 트래픽이 없을 때, 안드로이드의 세로 안정성 알고리즘 작동하기 시작합니다.
2. 작업자는 "질량 중심-안드로이드 발의 즉각적인 지원 중심"선의 수직에서 오른쪽-왼쪽으로 편차의 각속도를 설정합니다. 측면 안정성 알고리즘이 작동합니다.
3. 조작자는 안드로이드 질량 중심의 신호 교번 수직 이동 범위를 설정하고 이를 초과하여 신호 트래픽이 없으면 수직 이동 알고리즘이 작동하는 손의 하중에 대해 별도로 이 수치를 설정합니다.
4. 조작자는 안드로이드 질량 중심의 수직 이동 가속도를 설정하고 안드로이드 손바닥에 가해지는 하중에 대해 별도로 이 수치를 설정합니다. 이를 초과하고 트래픽이 없으면 수직 이동 알고리즘이 작동합니다.
5. 알고리즘이 피드백 신호의 트래픽과 독립적으로 작동하는 Android 안정성 알고리즘의 병렬 작동 모드 설정.
ANDROID STABILITY SYSTEM의 알고리즘: institutrobotov.ru/#7 알고리즘은 안드로이드 손바닥에 있는 하중의 각도 방향을 유지하고 수직을 따라 질량 중심의 움직임 가속을 줄입니다. 안드로이드 손바닥 안의 화물: 기관총, 장거리 열화상 카메라...
ANDROID의 안정성 시스템은 작업자의 신호에 없는 걷기 및 달리기 문제에 대해 안드로이드를 지속적으로 보장합니다. 이를 위해 안드로이드 발에는 3D 선형 가속 센서가 있으며, 그 신호(조작자의 설정)는 안드로이드 발의 임계 가속 수치를 초과할 때 조작자의 발 드라이브로 이동합니다. 중요한 수치는 표로 안드로이드의 속도와 연결되어 있습니다.
RUNNING ALGORITHM은 달리는 동안 안드로이드의 수직 위치의 임계 각속도 및 안정성 각도를 초과하는 것을 허용하지 않습니다. 따라서 조작자가 달리면서 안드로이드를 바닥에 눕히려면 오른손이나 왼손으로 표준 동작을 수행하거나 무릎을 강하게 구부립니다. 가장 중요한 임계각은 몸통의 종방향 임계각, 몸통의 좌우 횡방향 임계각이다.
몸통의 종방향 임계각은 최대 힘의 순간에 안드로이드의 질량 중심과 발의 받침점을 연결하는 선의 안드로이드 실행의 종방향 수직면에 대한 투영과 수직 사이의 각도입니다. 이 발을 밀어.
몸통의 종방향 임계 각도가 표준보다 작은 경우(너무 뒤로 기울어짐) 알고리즘은 스텝의 영점에서 무릎 각도를 줄입니다.
신체의 종방향 임계 각도가 표준보다 크면(너무 앞으로 기울어짐) 알고리즘은 스텝의 영점에서 무릎 각도를 증가시킵니다.
스텝의 영점은 감속 착륙이 가속으로 바뀌는 지점입니다. 몸체 질량 중심의 종 방향 가속도는 0입니다.
종방향 수직 실행 평면 - Android의 질량 중심을 통과하고 Android의 모션 벡터와 평행한 수직 평면입니다.
몸통의 왼쪽 횡방향 임계각은 최대 미는 순간에 안드로이드의 질량 중심과 왼발의 받침점을 연결하는 선의 안드로이드 실행의 횡방향 수직면에 대한 투영과 수직 사이의 각도입니다. 이 발의 힘.
달리기의 가로 평면은 안드로이드의 질량 중심을 통과하고 달리기의 세로 평면에 수직인 수직 평면입니다.
몸통의 오른쪽 횡방향 임계각은 최대 미는 순간에 안드로이드의 질량 중심과 오른발의 받침점을 연결하는 선의 안드로이드 실행의 횡방향 수직면에 대한 투영과 수직 사이의 각도입니다. 이 발의 힘.
걷는 안드로이드 아바타의 길이 방향, 횡단 발 각도에 대한 알고리즘은 다음과 같이 조작자와 독립적으로 작동합니다(예외: 조작자 설정).
1. 발의 가로 각도가 0이 되는 경향이 있습니다. 알고리즘-1은 프로그레시브 서스펜션의 그래프(이동 중 서스펜션 강성의 의존성)인 발의 가로 각도의 0으로부터의 편차에 대해 리미터 서스펜션의 강성을 제어합니다. 서스펜션의 강성은 안드로이드 아바타의 보행(달리기) 속도가 증가함에 따라 증가하고 발이 착지하는 표면의 백분율 점도는 감소합니다. Algorithm-1은 2개의 앞발 힘 센서의 수에 따라 발의 가로 각도를 제어합니다.
2. 안드로이드의 걷기(달리기) 코너링에서 발의 측면 각도는 안드로이드 측면 원심 가속도 센서, 두 개의 전면 발 힘 센서를 설정합니다.
3. 발의 종방향 각도(안드로이드의 가로 수직면에서)는 안드로이드 아바타의 보행(달리기) 속도와 발에서 아래쪽 다리의 기울기에 따라 (표에서) 표준 각도 수치를 갖습니다. 안드로이드의 가로 수직면. 또한 발이 착지하는 표면의 백분율 점도(표)에 따라 달라집니다. 알고리즘-2는 발의 세로 각도에 대한 표준 수치를 제공합니다.
안드로이드의 발에는 두 개의 넓은 발가락이 위쪽으로 향하고 있습니다. Algorithm-2는 발의 모든 작동 모드에서 편차 각도의 표준 수치를 발 발가락의 두 발가락 각각에 대해 개별적으로 설정합니다.
4. 수직에서 아래쪽 다리의 기울기에 따라 알고리즘 2에 의해 설정된 표준 수치에서 안드로이드 발의 세로 편차 리미터의 점진적 정지가 있습니다.
안드로이드 풋 피치 리미터의 프로그레시브 서스펜션은 위쪽으로 튀어나온 장애물과 발의 종방향 충돌이 발생할 경우 수직 서스펜션 트래블과 리어 서스펜션 종방향 트래블에 대해 별도로 조정됩니다. 안드로이드 발 구속 펜던트는 한국에서 특허를 받을 것입니다.
강한 걷기, 달리기의 알고리즘: 안드로이드의 몸은 선택한 경로에서 옆으로 왼쪽(오른쪽)으로 떨어집니다.
조작자의 발에서 밀기 시뮬레이션: 안드로이드 정강이 뒤, 바닥 표면 센서 - 거리 "뒤꿈치-지상"을 측정하는 적외선 고도계. 안드로이드 발이 땅에 닿을 때 다리 외골격의 액추에이터는 피드백 신호에 따라 작업자의 발을 위아래로 날카롭게 밀어서 (안드로이드 발 센서에 따라) 전체 힘을 시뮬레이트합니다. 안드로이드 발.
텔레프레즌스 슈트의 ACTIVE 3D SUSPENSION은 안드로이드 바닥면 센서의 신호에 따라 착지 후 알고리즘에 따라 천천히 작업자의 상체를 하강시켜 안드로이드가 발을 미는 순간 ACTIVE 3D SUSPENSION이 최대 스윙(모두 15cm)으로 작업자의 발을 위아래로 던지면서 발에 가해지는 하중 증가, 달리는 동안 작업자 신체의 수직 가속도를 시뮬레이션합니다.
ACTIVE 3D SUSPENSION의 알고리즘은 착지와 발끝 사이의 period-1 시간 동안 작업자를 15cm 아래로 내릴 시간이 있어야 ACTIVE 3D SUSPENSION의 이동(15cm)이 충분히 발이 바닥에 닿는 순간 작업자 발의 과부하에 대한 긴 시뮬레이션 . 알고리즘이 피드백 신호에서 취하는 시간의 주기-1.
평균 제어 지연이 있는 "PREDICTION" 모드에서 알고리즘은 제어 지연 시간만큼 더 일찍 작업자의 발에 시뮬레이션된 푸시를 제공합니다. 운영자가 백분율 종속성 "제어 지연 - 리드 타임"을 수동으로 설정할 수 있습니다. 제어 지연이 큰 경우 알고리즘은 안드로이드 발의 평균 착지 높이와 속도 벡터를 고려하여 안드로이드 발의 2-4단계에 대한 평균 힘을 시뮬레이션합니다.
달리기에서 발로 밀 때마다 신체의 관성력은 작업자 서스펜션의 3D 짐벌의 AXIS-2를 돌려서 작업자가 뒤로 단계적으로 단기적으로 기울어지는 방식으로 시뮬레이션됩니다. 기울기는 발차기 후 안드로이드 몸통의 관성력에 정비례합니다.
달리는 동안 ABBA의 Android Running Safety Algorithm이 오퍼레이터의 신호가 안드로이드를 떨어뜨리는 것을 감지하면 ABBA는 안드로이드의 자체 실행 알고리즘을 켜고 안드로이드의 속도를 오퍼레이터의 신호 수에 맞게 조정합니다. 의도적으로 안드로이드를 떨어뜨리기 위해서는 작업자가 브러시로 "DROP ANDROID" 제스쳐를 수행해야 합니다. ABBA에서 운전자는 속도 범위를 설정하여 "WALK" 모드를 켤 수 있습니다.
무중력 시뮬레이션 알고리즘: 동작 범위의 약 10% 거리에서 움직임의 부드러운 감속으로 팔과 다리의 움직임 벡터를 보존한 다음 팔, 다리의 무게, 메커니즘의 모든 순간을 소프트웨어로 완전히 보상합니다. . 몸통 움직임의 회전 각속도가 유지됩니다.
Telepresence 슈트에 의한 가속 시뮬레이션:
1. 안드로이드는 오른쪽 어깨에 무거운 짐을 싣습니다. 오른발은 왼발보다 3개의 센서에서 더 많은 힘을 가집니다. 안드로이드 발 힘 센서의 신호에 따라 텔레프레즌스 슈트는 "발의 숫자의 백분율 차이 - 텔레프레즌스 슈트의 기울기 각도", "발의 숫자의 백분율 차이"표에 따라 사람을 오른쪽으로 기울입니다. - 텔레프레즌스 수트 기울기의 각속도", "오른발 힘의 합 증가율 - 각속도 텔레프레즌스 수트 기울기.
알고리즘에서 텔레프레전스 슈트의 기울기 각속도를 추가하는 규칙. 트래픽이 제한됩니다. 안드로이드 발 강도 센서의 숫자 대신 백분율 차이 숫자 + 안드로이드의 오른발 힘의 합의 성장률만 있습니다.
2. 안드로이드 점프 - 무중력 센서(수직 가속도 센서)가 텔레프레즌스 슈트에 무중력 신호를 제공합니다. 힘 시뮬레이션
3. 걷기, 뛰기, 뛰기에서 발을 착지할 때 사람의 발을 날카롭게 위로 던지는 다리의 드라이브는 안드로이드의 발에서와 같이 발에 가해지는 부하를 시뮬레이션합니다. 서스펜션 리턴 이동이 느립니다. 서스펜션 복귀 속도 - 매개변수 결정표에서: 속도, 무중력 시간, 제동 가속도
4. 달리면서 앞으로 가속하면 안드로이드가 뒤로 젖혀집니다. 안드로이드 몸통의 3D 자이로스코프 신호에서 텔레프레즌스 슈트는 사람을 이 각도로 다시 기울입니다. 남자는 본능적으로 몸을 앞으로 기울여 안드로이드의 위치를 안정적으로 유지하고 몸통의 각속도를 0으로 만듭니다. 동시에 ANDROID STABILITY SYSTEM의 알고리즘이 트리거됩니다.
5. 안드로이드 속도가 느려짐 - 텔레프레즌스 수트가 사람을 앞으로 기울입니다. 인간은 본능적으로 몸통을 뒤로 기울여 안드로이드를 안정적으로 유지하고 몸통의 각속도를 0으로 만듭니다.
6. 텔레프레즌스 슈트는 앞뒤로 90° 기울임으로써 최대 1g의 가속도를 시뮬레이트합니다. 더 높은 가속도는 텔레프레즌스 원심 분리기 슈트만 시뮬레이션합니다.
7. 회전할 때 안드로이드의 원심력은 사람이 옆으로 기울어지는 것으로 시뮬레이트됩니다. 발에 가해지는 하중의 균형을 맞추는 알고리즘은 다리의 무릎을 다른 각도로 구부립니다.
8. 보행면의 측면 기울기가 증가함에 따라 안드로이드 경사각 센서는 몸통 클램프 프레임에 각도, 각 가속도를 부여합니다. 옆으로 넘어지지 않기 위해 본능적인 움직임을 가진 사람은 몸통의 각속도를 무효화시켜 안드로이드의 위치를 안정되게 유지한다.
9. 제동 버스에서 서있는 안드로이드 몸통 각도 센서는 몸통 클램프 프레임에 각도, 각속도를 전송합니다. 앞으로 넘어지지 않기 위해 안드로이드 몸통의 각속도가 경사각 센서에 따라 0이 될 때까지 사람은 몸통을 뒤로 기울인다. 마찬가지로 버스를 가속할 때
10. 슬라롬 스키는 3D 짐벌 틸트 및 3D ACTIVE SUSPENSION을 시뮬레이션합니다. 운전자의 머리가 자연스럽게 기울어지기 때문에 멀미를 할 가능성이 줄어듭니다.
텔레프레즌스 슈트의 원격 레슬링
텔레프레즌스 수트에서 레슬링 스파링은 최대 6000km 거리에서 수행할 수 있습니다. 포스 피드백 외에도 서버 컴퓨터의 컴퓨팅 리소스, 신체의 3D 스캔이 필요합니다. 컴퓨터는 팔, 다리, 몸통의 클램핑 프레임 모서리로 공간에서 사람의 위치를 결정합니다.
컴퓨터는 인체 표면 분쇄의 표준 모델로 힘 센서(우선 순위가 있음)의 피드백을 보완합니다. 뼈, 세 가지 좌표에서 표면 붕괴 수준이 다른 신체 부위(깊이 붕괴, 세로 이동, 신체 연조직의 가로 이동).
컴퓨터는 계산된 바닥 표면 + 레슬러의 2-3개 접촉점(핸드 그립, 스윕)에 따라 두 레슬러의 일반 좌표계를 결정합니다. 컴퓨터는 팔과 다리의 클램핑 프레임 각도, 수직에서 두 축을 따라 레슬링 선수의 몸 기울기에 의해이 2-3 개의 접촉점 높이를 결정합니다. 컴퓨터는 다음을 사용합니다.
1. 발 근력 센서 숫자
2. 2-3개의 접촉점에 작용하는 힘(그랩, 스윕)
3. 컴퓨터는 레슬링 선수 중 한 명의 발 힘 센서의 제로 신호를 기반으로 성공적인 던지기를 결정합니다.
4. 컴퓨터는 몸통 클램프 프레임의 3D 각도 센서 및 3D 가속도 센서에서 수신하는 레슬링 선수 신체의 각도 및 선형 움직임의 궤적 수치를 통해 접촉이 끊어진 경우 공통 좌표계를 저장할 수 있습니다. 씨름꾼들 사이.
5.그룹 드라이브의 제어된 클러치에 있는 전류의 강도에 따라 컴퓨터는 신체의 무게, 서로 다른 축을 따른 관성 모멘트, 수신 후 두 신체의 위치를 계산합니다. 클러치의 현재 수치는 피드백 신호에 포함됩니다.
유사한 서버 컴퓨터 계산을 통해 최대 6000km 거리에서 텔레프레즌스 수트를 입은 남성과 여성 간의 원격 섹스가 가능합니다.
OBJECT GRIP ALGORITHM: 작업자가 물체를 잡은 후 브러시로 물체를 잡은 후 3-4초 후에 알고리즘이 물체의 평균 그립력 기준을 계산합니다. 또한, 작업자에 의한 파지력의 작은 변동이나 피드백 중단에도 불구하고 안드로이드 브러시로 물체를 파지하는 힘은 브러시로 물체를 파지하는 중간 힘-1 기준 이상을 유지하므로 android는 객체를 삭제하지 않습니다. 물체에서 손가락을 풀기 위해 작업자는 힘-1과 같은 힘-2를 손가락에 적용해야 합니다. 작업자는 힘-2를 힘-1보다 크거나 작게 백분율로 설정할 수 있습니다. 이 알고리즘은 작업자의 손에 의해 움직이는 물체와 정지된 물체에 대해 서로 다른 백분율 계수를 가집니다. 운영자는 캡처 알고리즘 목록에서 개체 캡처 알고리즘을 선택하고 선택한 알고리즘의 숫자를 변경할 수 있습니다.
백핸드 컨트롤: 텔레프레즌스 수트의 디자인은 손을 등 뒤로 움직이는 것을 방지합니다. 필요한 경우 손가락 제스처로 "가슴 뒤로" 모드를 켤 수 있습니다. 손을 앞으로 움직이면 사람은 등 뒤에 있는 안드로이드의 손을 미러링합니다. 안드로이드의 후면 스테레오 카메라가 자동으로 켜집니다.
안드로이드 드라이브 테이블
"인간-안드로이드" 힘 피드백 채널에서 힘 센서의 폴링 주파수는 5-50Hz입니다(제어 지연에 따라 다름). 힘 피드백 채널 "android - 외부 환경"에서 힘 센서의 폴링 주파수는 1000-2000Hz입니다.
"안드로이드 - 환경" 포스 피드백 채널에서 안드로이드 드라이브는 "환경의 저항력 증가 비율 1번-드라이브에 의한 안드로이드 포스 감소 비율 2번" 표에 따라 작동합니다. 운영자는 숫자 1에 반응합니다."
제어 지연이 클수록 숫자 -2가 커집니다.
외부 환경의 저항력으로 인한 제동 가속도(안드로이드 경첩의 가속 센서)가 클수록 안드로이드 테이블 "제어 지연 - 제동 가속도 - 2번"의 숫자 2가 커집니다.
운영자는 안드로이드 데이터베이스에서 안드로이드 환경 힘 피드백 채널 테이블의 전문 라이브러리(공병, 외과의, 백병전, 로더...)를 선택할 수 있습니다.
인간 팔의 측면에 있는 팔 외골격 시스템 활용: 바닥에 앉아 팔꿈치를 무릎에 기대어 앉을 수 있습니다. 다리 외골격의 레버 시스템은 다리 뒤에 위치하며 측면 다리 너머로 돌출되지 않습니다. 작업자는 바닥에 앉아 무릎을 150 ° 각도로 구부리고 세로 및 가로 분할을 할 수 있습니다.
텔레프레즌스 수트를 구동하기 위해 3상 전기 구동의 단순화되고 매우 저렴한 고전력 스위칭(초고전류)을 발명했습니다. 나는 한국의 다른 발명품으로 특허를 낼 것입니다.
로프용 클램핑 프레임의 길이 변경을 위한 보상기:
1. 내가 발명한 메커니즘은 클램핑 프레임의 길이를 조정할 때 케이블의 길이를 조정합니다.
2. 내가 발명한 다른 메커니즘은 클램핑 프레임의 길이를 조정할 때 케이블 길이를 조정할 필요가 없습니다.
머리에 있는 두 개의 파이프 가이드를 통한 드라이브가 낮아집니다.
머리 방향 각도 센서 2개를 제거하기 위해 몸통의 클램핑 프레임에 고정하는 가상 현실 헬멧은 머리 움직임 때문에 초당 150프레임만 구동하지 않습니다. man-1에게는 보이지 않는 컷아웃이 있는 어깨 부분이 있는 반투명 3D 구형 스크린 뒤에는 32개의 피드백 카메라가 원격 텔레프레즌스 슈트-2를 입은 man-2에게 텔레프레즌스 슈트-1을 입은 man-1의 얼굴 3D 사진을 제공합니다.
각 TV 카메라는 얼굴의 정사각형 조각을 보여주고 구형 왜곡은 소프트웨어에 의해 보정됩니다. 사각형의 경계는 사람의 머리에 일시적으로 켜진 직사각형 조명 그리드로 보정됩니다. 그리드 셀은 정사각형 조각보다 10배 작습니다.
텔레비전 카메라에는 무광택 화면에서 반사되는 확산광이 있는 백라이트 램프가 있습니다. 각도, 헬멧의 안면 조명 유형, 색상 변경, 각 LED 램프의 밝기는 소프트웨어 시나리오입니다. 120-180Hz 스캔의 3D 화면, 피드백 카메라, 램프는 서로 간섭하지 않고 시간에 따라 개별적으로 펄스 작동합니다.
3D 화면의 반경은 최대 ~30cm입니다. 손의 외골격이 화면을 망치지 않습니다. 눈에서 멀어지면 헬멧 화면-멀미가 적고 "실제 물체까지의 거리-화면까지"의 차이로 인한 메스꺼움.
구형 3D 스크린은 측면을 10cm 평평하게 만들어 위에서 작업할 때 손이 스크린에 닿지 않도록 했다. 3D 화면 측면의 픽셀 밀도는 전면보다 높습니다.
화면의 그림에서 가까운 물체의 왜곡은 물체가 떨어진 카메라의 초점 범위 설정 숫자에 따라 소프트웨어에 의해 보정됩니다.
옵션-2 3D 스크린: 6개의 레이저 프로젝터가 스크린 외부 또는 내부에서 구형 3D 스크린에 이미지를 생성합니다.
다른 회사의 텔레프레즌스 슈트를 다른 회사의 안드로이드와 동기화하려면:
1. 피드백 신호에서 힘과 촉각 피드백의 모든 수는 백분율입니다.
2. 세계 표준 각도 숫자가 계산되는 매니퓰레이터(손가락, 손, 발)의 기본 영점.
3. 촉각 힘 피드백 신호의 힘 숫자에 대한 세계 표준 참조 영점. 기본 영점은 종종 신호에서 피드백 수치를 얻기 위해 초과해야 하는 힘의 수치입니다.
4. 매니퓰레이터의 최대 편향의 세계 표준 베이스 상부(전면) 지점.
5. 매니퓰레이터 최대 편향의 세계 표준 베이스 하부(후면) 지점.
다른 회사의 소프트웨어와 텔레프레즌스 수트, 비표준 운동학의 안드로이드와의 호환성을 위해 "텔레프레전스 수트 운동학 - 안드로이드 운동학"이라는 테이블(팔, 다리의 클램핑 지점에 따름)이 있습니다.
스테레오 카메라로 로봇 탐색
빛 부족: 로봇의 램프를 더 멀리 떨어뜨립니다.
과도한 빛: 빛 센서와 소프트웨어는 사진의 편광 벡터를 제어하고 픽셀에서 신호 제거 기간을 줄입니다.
1. 픽셀의 작동 기간이 카메라의 프레임 시간보다 짧습니다.
2. "프레임 시간 - 픽셀 동작 기간"의 차이의 시간에 대한 픽셀 신호는 0으로 리셋된다.
로봇의 카메라가 움직일 때 로봇의 좌표는 알려진 크기의 물체의 각 치수의 성장 속도에 의해 결정됩니다.
3D 구형 안드로이드 헤드 디스플레이의 오퍼레이터 얼굴.
3D SOUND는 모든 사운드 도착 벡터를 정확하게 재현합니다.
헬멧의 구형 스크린에 직경 2mm의 구멍을 통해 소리를 내는 반구형 30개의 뿔이 있는 헬멧의 각 귀에 대해. 구멍 - 작업 화면의 구멍이 보이지 않도록 3D 화면의 인접 픽셀 색상에 따라 LED로 내부에서 조명되는 2mm 길이의 튜브.
사운드 볼륨이 임계값을 초과합니다. 각 홀 스피커의 사운드에 대해 소프트웨어는 다른 홀의 사운드를 켭니다. 베이스는 전자 밸브에 의해 팔(다리) 클램프의 환기 공기에 의해 제공됩니다.
헬멧의 밤에는 이웃을 깨우지 않도록 소리가 초음파 주파수 (밤에는 모든 볼륨)의 비트에서만 작동합니다.
텔레프레즌스 수트에서 거리에서 수천 킬로미터 떨어진 운영자가 제어하는 안드로이드가 옆에서 운전하는 자동차에 부딪히지 않도록 3D 사운드는 소리 도착의 모든 벡터를 인식하여 떨어지다.
내가 발명한 정확한 3D 사운드 시스템:
1. 3D 사운드의 출력 신호는 전체 3D 사운드 채널에 의해 전송되는 공간의 세 축을 따라 총 사운드 진폭의 총 수인 길이인 기류(파동)의 순간 총 벡터가 청취 지점에 있습니다.
2. 공간 좌표에 대한 3D 사운드 벡터의 프로젝션 - 이는 사운드 그림의 소스에서 사운드 도착의 3D 벡터를 결정하는 3D 사운드의 3채널입니다.
3. 소리 도달의 수평 각도: 신호 축적 후 수직 멤브레인의 차이 신호에 따라: 각 주파수 범위에는 별도의 신호 축적 타이머가 있습니다. 타이머 및 신호 축적 기능은 마이크로폰 회로의 소프트웨어 또는 커패시터에 의해 수행됩니다.
4. 소리 도달의 수직 각도: 3D 마이크의 수평 막의 차이 신호와 수직 막의 전체 신호에 의해. 차이 신호 - 신호 누적 후 그림: 각 주파수 범위에는 별도의 신호 누적 타이머가 있습니다. 타이머의 기능, 신호 축적은 마이크 회로의 소프트웨어 또는 커패시터에 의해 수행됩니다.
5. 소리 도착 반구는 원리에 따라 차이 신호의 극성에 의해 결정됩니다. 그래프에서 양의 반파장 영역(공기 압축)이 음의 영역(공기 희박) 반파. 극성은 소프트웨어에 의해 결정됩니다. 소리는 양의 반파 쪽에서 나옵니다.
6. 소리의 소스(3D 사운드 도달 벡터)의 위치는 신호 극성에 의해 결정됩니다. 사운드 소스는 공기 압축 절반의 전체 영역이 있는 방향(소리 도달 벡터의 3D 각도)에 있습니다. -세 좌표의 파동이 최대입니다.
7. 3D 사운드 도달 벡터의 각도는 마이크 멤브레인의 압축 반파(공기)의 순간 진폭 비율에 의해 결정됩니다.
(텍스트 3D 사운드가 러시아를 2번 파괴함)
3D 사운드: 오퍼레이터의 머리는 공간의 청취 지점-D에 있습니다. 모든 복잡한 사운드 사진은 매 순간 D 지점에서 단 하나의 전체 3D 공기 움직임 벡터를 제공합니다. 개별 음원의 모든 공기 움직임 벡터는 하나의 전체 3D 공기 움직임 벡터에 추가됩니다. 이 공기 이동의 3D 벡터는 어디에서, 어떤 소리의 출처에서, 정확히 어떤 소리에서 왔는지에 대한 모든 정보를 100% 전달합니다.
3D 에어 모션 벡터는 모든 별도의 사운드 정보 소스에서 모든 사운드 도착 벡터에 대한 100% 정보를 제공합니다. 이 정보를 공간에서 떨어져 있는 사운드 스피커의 개별 채널로 분리하려면 공기 이동의 3D 벡터를 공간의 3개 좌표에서 3개의 투영으로 분해해야 합니다. 소프트웨어는 순간 음량 레벨의 비율에 따라 채널의 각도 분리를 수행합니다.
수평 사운드 사진을 찍습니다. 수평면에서 2D 사운드 도달 벡터 신호로 전송됩니다. 오른쪽과 왼쪽 스피커 사이의 순간 음량 레벨의 비율이 각각 50%이면 사운드 그림의 음원은 스피커 사이의 정확히 중간에 있습니다. 스피커는 일반적으로 텔레프레즌스 수트의 작동자 주위에 원형으로 배열됩니다.
순간 음량 레벨의 비율이 왼쪽 스피커에서 20%이고 오른쪽 스피커에서 80%이면 소리는 전방 반구에서 들립니다. 사운드 사진의 음원은 작업자를 통과하는 가로 세로 축의 오른쪽으로 35° 각도에 있습니다.
왼쪽 후면 스피커에 80%, 오른쪽 후면 스피커에 20%인 경우 - 사운드 그림의 음원은 작업자를 통과하는 가로 세로 축 뒤에서 오른쪽으로 35° 각도에 있습니다.
소프트웨어는 소리가 앞쪽에서 나온 것인지 뒤쪽 반구에서 나온 것인지 어떻게 결정합니까? 소리가 어느 방향에서 들렸습니까? 오퍼레이터 앞이나 뒤입니까? 작업자 앞 또는 뒤의 위치에서 소프트웨어는 신호의 극성에 따라 결정합니다. 음압의 양의 반파(압축파) 쪽에서 소리가 납니다.
2차원 음도달 벡터 신호의 양압축 반파가 전방 반구를 가리키면 그 안에 음원이 있는 것이다. 2D 벡터 신호가 후방 반구를 가리키는 경우 음원은 후방 반구에 있습니다.
유사하게, 소프트웨어는 음원에 대한 각도와 종방향 수직면 또는 횡방향 수직면에서의 위치를 찾습니다.
내가 발명한 세계에서 가장 트래픽 효율적인 3D 사운드 시스템에서 모든 채널의 3D 사운드 출력 신호는 동일하고 순간적인(0 이상에서) 사운드 레벨만 다릅니다. 내가 교통을 발명한 3D 사운드 시스템은 ~ 7.1 사운드보다 ~ 6배 적고 ~ 5.1 사운드보다 ~ 4배 적음<
내 3D 사운드 시스템의 음질은 이론적으로 7.1 사운드와 동일합니다.
음원에 대한 방향을 결정하는 각도 정확도는 사운드 도달 벡터 및 화자 수의 소프트웨어 계산을 고려하여 7.1 사운드보다 높습니다.
3D 사운드 녹음: 3D 마이크: 가능한 한 근접한 3개의 상호 수직 멤브레인 + 나머지 주파수를 차단하는 필터가 있는 별도의 하우징에 있는 3개의 상호 수직 베이스 마이크.
시스템 시대를 초월한 스피커
텔레프레즌스 수트의 스피커가 고가의 정전기 스피커와 같은 고품질의 소리를 내기 위해서는 방출기의 관성이 소프트웨어에 의해 보상됩니다.
내 소프트웨어 알고리즘: 오디오 신호를 12개의 정현파 오디오 주파수로 분해합니다. 이는 소프트웨어 또는 하드웨어로 수행할 수 있습니다.
그래프의 오름차순 분기에서 공기 압축의 양의 반파의 각 주파수에서 계수 N1만큼 부드러운 것은 더 가파른 상승 각도를 제공합니다. 공기 압축의 양의 반파 그래프의 하강 지점은 계수 N2에 의해 부드러워집니다.
양의 반파의 두 분기를 차트에 맞추기 위해 소프트웨어는 반파 차트의 상승 분기 기간을 줄이고 하강 분기의 기간을 늘립니다. 사운드 반파의 정현파 모양은 파면이 급격히 상승하고 완만하게 떨어지는 거의 삼각형의 반파로 바뀝니다.
오디오 신호에서 음의 반파 희박화를 사용하는 유사한 작업입니다.
수정된 양의 반파로 사운드를 스피커에 적용하고 부드러운 그래픽 인터페이스를 귀로 부드럽게 조정하여 계수 N1 및 N2를 선택한 다음 12개 주파수 각각에 대해 음의 반파에 대해 동일한 계수를 개별적으로 선택해야 합니다. . 참조 음악 파일의 출력 사운드와 귀로 이 작업을 수행할 수 있습니다.
이러한 작업의 결과 스피커는 고가의 정전기 스피커와 동일한 고품질로 소리를 냅니다. 디지털 형식의 모든 설정은 사운드 파일 자체로 만들거나 그 과정에서 개별 진폭-주파수 특성을 소프트웨어와 정렬하여 사운드 재생 시스템 자체에 도입할 수 있습니다.
이 소프트웨어는 측정을 따르고 충분한 사운드 처리 경험이 있으며 사운드가 재생될 사운드 재생 시스템 유형을 이해하는 경우 모든 사운드 신호의 음질을 향상시킬 수 있습니다.
SOUND CHANNEL SELECTION: 조작자가 머리를 음원 쪽으로 돌리면 선택한 방향으로 소리가 자동으로 증폭되고 나머지 3D 사운드 채널은 음소거됩니다. 운영자는 설정에서 미리 사운드 추출 알고리즘을 선택합니다.
드라이브가 없는 MODULATING CORNER REFLECTORS (내 발명품) 안정화 시스템은 리피터 레이저 빔의 반사 에너지를 변조하여 텔레프레즌스 슈트에 안드로이드 센서 신호를 제공합니다. 모듈레이팅 코너 리플렉터의 3개 거울은 각각 별도의 모듈레이터로 짧은 시간 동안 여러 번 감소합니다.
2개의 레이저 빔 길이에서 안드로이드와 통신합니다. 광전지용 길이 1 빔. 길이 - 변조가 있는 왕복 코너 리플렉터용 빔 2개. Android는 피드백에 에너지를 낭비하지 않고 변조에만 에너지를 낭비합니다. 광전지, 모서리 반사경에는 거울에 필터가 있습니다. 안드로이드의 머리, 어깨, 손바닥에 있는 모서리 반사경을 조절합니다.
귀하 또는 다른 사람의 레이저 빔 안드로이드는 각 정보 패키지의 대화 암호로 서명하여 결정합니다. 서명은 암호 해독을 방지하기 위해 패키지의 숫자에 분산되어 있습니다. 강한 간섭으로 안드로이드는 피드백 양쪽에 대한 정보 패킷을 단축합니다.
직접 빔, 많은 벽에서 반사되는 빔 대신 긴 리피터 안드로이드 체인을 사용할 수 있습니다. 적이 다중 스펙트럼 연막이 있는 수류탄을 사용하면 중계기가 두 개의 레이저 주파수 비트로 합성된 전파를 뚫습니다. 알고리즘은 피드백 신호의 트래픽 숫자에 따라 합성된 전파의 길이를 선택합니다.
원칙에 따라 자동 이득 제어 기능이 있는 좁은 빔 중계기를 통한 통신: 간섭이 증가하면 수신기의 이득을 줄이고 송신기의 이득을 높입니다. 간섭 센서의 게인을 제어합니다. 간섭 센서는 수신기의 신호를 사용하는 소프트웨어입니다.
안드로이드 공병, 안드로이드 특수 부대에는 반사된 엑스레이에 대한 엑스레이 비전이 있는 펄스 엑스레이 탐조등이 있습니다.
군용 안드로이드의 도시 전투: AI가 빔을 반사하는 (열화상 카메라) 표면을 선택하는 리피터 드론의 좁은 초점 적외선 레이저 통신. 적외선 간섭: 테라헤르츠, X선 통신.
안드로이드의 앞, 뒤, 측면, 상단에 있는 변조 코너 리플렉터에는 번호가 매겨져 있습니다. 관성 내비게이터, 열화상 카메라의 이미지(빔 도달 각도) 및 간섭을 사용하여 소프트웨어(운영자)는 어떤 변조 안드로이드 코너 리플렉터를 켤지 찾습니다.
운영자의 피드백이 없습니다. 안드로이드가 실행을 멈추고 타이머 후에 잠자리에 듭니다. AI 템플릿 반응 - 사용자 기본 설정. 패턴: 레이저 또는 라디오 식별자 "친구 또는 적"에 대한 응답 없이 좌표, 시간으로 지정된 구역에서 적군 병사의 인식, 파괴.
TELEPRESENCE SUIT - 100명의 안드로이드 병사와 12개의 쿼드로콥터로 물체를 방어하는 원격 병사의 텔레포트. 안드로이드(쿼드콥터) 소프트웨어는 소리 도착 시간의 차이, 충격파의 Z-플롯에 대한 근접 수준에 따른 도플러 효과 곡선 + 삼각 측량 + 총알 속도에 의해 마이크에서 가장 가까운 비행 총알의 궤적을 결정합니다. . 내 알고리즘이 있습니다.
텔레프레즌스 수트의 소프트웨어는 총알이 가장 가까이 날아간 안드로이드 또는 쿼드로콥터를 찾아 운영자를 전환하여 안드로이드(쿼드콥터)의 위치(컴퓨터 + 안드로이드 카메라 + 쿼드로콥터 카메라의 전투 다이어그램)를 화면에 표시하고 적. 운영자는 카메라의 각도, 소프트웨어의 알고리즘을 선택하고 선택한 알고리즘의 숫자를 지정합니다.
콘크리트로 부서진 안드로이드 - 왼쪽 팔꿈치 안쪽에는 유압 실린더가 있으며 막대의 매우 단단한 끝이 손등까지 뻗어 있습니다. 콘크리트 블록이나 바위에 손등을 대면 안드로이드는 진공 방전기를 통해 유압 실린더 유체 내부의 전극에 20,000-100,000V를 제공합니다. 전기 유압 효과 - 수백 톤의 힘을 가진 막대의 끝이 콘크리트 블록이나 암석에 틈 없이 부딪혀 콘크리트의 긴 균열을 100분의 1초 만에 뚫고 콘크리트 다리를 부수었습니다.
유압 실린더의 후면 부분은 단단하고 단단하며 15kg의 질량을 가지며 자기 유변 적응 형 충격 흡수 장치가있는 스프링 서스펜션입니다. 유압 실린더의 유체는 비탄성이며 소리의 속도가 빠릅니다. 저전력에서 주파수 비트를 사용하여 안드로이드는 벽에 손을 대고 1미터 길이의 콘크리트 벽을 통해 큰 소리로 음성을 전달할 수 있습니다(고기를 포기하십시오!). 초음파 주파수의 비트는 음성의 음압 그래프를 정확하게 전달합니다.
Переводчик Владимир Пак.
Москва.
11.03.2023 institutrobotov.ru
20.10.2021
텔레프레전스 홈슈트 (TELEPRESENCE HOME SUIT) 는 반경 6000km이내의 가상 현실 (VR)의 아바타인 실제 안드로이드 로봇을 제어한다. 텔레프레전스 홈 슈트 (TELEPRESENCE HOME SUIT) 없이는 화성, 달, 행성 식민화 자급자족 사업은 불가능하다. 이것은 수십 억 일자리를 만들어 주고, 대륙간 이체 횟수를 수십억 배로 증가시키며 우주사업은 지구에서 생산하는 것보다 수십억 배로 더 많은 것을 생산할 수 있게 할 것이다.
텔레프레전스 홈 슈트 (TELEPRESENCE HOME SUIT) 는 물리력 감지장치, 팔, 팔의 각도와 액추에이터, 각도센서와 구동기 들어 있는 3D 구동축 내의 발+ 3D비디오 헬멧 + 3D사운드가있는 외골격 옷이다 (exosceleton).
전염병: 텔레프레전스 홈 수트는 수백명의 인구가 사는 도시내에 구조 역할을 한다. 최고 안드로이드형 전문가들이 도시 내 연구소, 병원에서 일한다.
사람은 사람이 입는 팔이나 발의 외골격 로봇의 물리력 센서를 누른다. 센서들이 구동기를 작동시켜 나가면서 사람의 힘을 제로화 시키고, «안드로이드 팔의 각도 – 사람 팔의 각도» 차이의 임계값까지 안드로이드의 팔 (다리)을 움직이게 한다.
외부보다 힘이 약한 경우 외부는 외골격 로봇을 착용한 사람을 제어한다.
단일 센서 제어: 구동기는 텔레프레전스 수트의 팔 (다리)의 힘 센서의 일정한 전기력를 유지한다. 구동기는 힘 센서의 상 (하) 임계값을 넘게 한다. 임계값이 역반전되면 구동기는 꺼진다. 팔 (다리)의 역방향 동작에는 2째 힘센서가 필요 없다.
듀얼 센서 제어 (two sensor control): 구동기는 슬관절 (족관절) flexion\ extension 힘 차이 임계값을 넘게 작동시킨다. 임계값이 반전되면 구동기가 꺼진다.
텔레프레전스 수트의 구동속도는 아래 값과 직접으로 비례한다:
힘 성장의 속도;
텔레프레전스 수트의 팔 (다리) 센서 임계값을 넘는 값.
단일센서 제어: 슬관절 (족관절 flexion 센서가 증가함에 따라 extentsion 센서가 0 (낮음)된다. No: 센서 미작동. Flexion 센서도 마찬가지다.
듀얼 센서 제어 실패 (failure): 단일센서가 켜진다.
2 모드에서 작업하기: flextion 센서 2개+ extension 센서 2ro = 텔레프레전스 슈트 센서의 4배 복제.
검토: 소프트웨어가in/out 그리고 서로 다른 코드/프로토콜로 4개 루트를 접속과 음성 체크한다
쌍 센서의 힘 차이가 작으면 진동은 «물리력 차이 – 구동기 속도» 알고리즘에 의해 감소된다. 차이가 작을수록 구동속도도 적어진다.
소프트웨어는 안드로이드 손바닥의 촉각 픽셀의 힘을 제한한다. 안드로이드 손바닥의 촉각 매트릭스의 강도 범위 설정 : 깨지기 쉽고 부서지기 쉬운 물체 관련 작업. 범위 초과 경우: 우선순위가 강제 피드백으로 전환.
힘 센서 없이는 에너지 소비가 더 많아진다. 기생진동 (parasitic oscillation) 폭 : 각도 일치 – 클램핑 힘; 클램핑 힘은 0~100%이며, 손이 부하를 부수게 한다.
안전규칙에 의해 텔레프레전스 수트 (출장) 입고 부부의 업무를 할 때 전력 센서가 필요하다. 팔, 다리 웨어러블 로봇의 무게는 스프링에 의해 보상된다. 소프트웨어는 드라이브의 피드백으로 돌아오는 숫자를 인식하여 수직에 대한 팔, 다리의 외골격의 2개 경사각의 사인 (수학: sine)을 따라 스프링 힘의 수를 뺀다.
팔과 다리의 외골격 무게는 드라이브에 의해 보상된다. Output 숫자 - K에 따라 도르래 (pulley) 의 공통 축에 있는 2축(수직에서 2축)의 전력센서; 구동기는 하부 도르래 * K* «케이블 – 수직»의 코사인을 곱한 값보다 초과되는 전력으로 상부 풀리의 평행 케이블을 당긴다.
팔, 다리의 외골격의 관성과 중량에 대하여는 뉴턴의 법칙-2 «F=ma» 에 따라 낮아지게 한다. M(중량) 대신 «K* «케이블 – 수직»각도의 코사인» 곱한 숫자를 대입해서 구동기는 중량과 외골격 관성력을 보상 시키는 최종 상부 풀리의 케이블의 전력을 얻는다.
3D절구공이 관절 (ball and socket joint, cardan) 외골격 관성의 모멘트는 «인간 + 외골격 + 3D ball- and- socket joint» 의 관성 모멘트와 사람 없이 관성 모멘트의 차이 (트랜지스터 커플리의 전류 강도)에 의해 보상 시킨다.
«외골격 – 안드로이드» («Exosceleton – android») 캘리브레이션 표는 오퍼레이터의 손과 안드로이드의 손바닥이 동시에 터치하도록 오퍼레이터의 손 각도 이동의 스케일을 안드로이드에게 바꾼다. 오퍼레이터의 손은 더 일찍 터치한 경우 – 손바닥이 움직이지 않고 그의 센서들이 안드로이드의 손을 오퍼레이터와 접촉할 때까지 움직이게 한다.
안드로이드 제어 딜레이 (ANDROID CONTROL DELAY): «오퍼레이터 동작 – 안드로이드가 동작하는 것을 보거나 느낀다 – 오퍼레이터가 동작 수정 – 안드로이드 동작 따라하기» 주기에 따른 안드로이드 움직임을 조정하는 시간이다. 이는 «텔레프레전스 슈트- 안드로이드»간의 거리를 3회 전송 시간 + 기기의 3개 딜레이이다.
텔레프레전스 슈트에서 안드로이드까지 거리가 6000 km이면 레이저 신호 (무선 신호)의 3회 전송 총 시간이 0,04초 + 기기의 지연 (delay) 0,02초, 3번; 합하면 제어 지연 시간은 0,1초 된다.
«텔레프레전스 슈트+ 안드로이드» 전력 피드백 : 완복 : 각도, 각속도, 강도, 강도 증가율.
강도 증가율이 높을수록 이득계수가 높아진다. 제어 딜레이 줄이기 위해 드라이브가 신호보다 케이블을 몇 배(강도 증가율 신호에 따름))로 더 세게 당긴다; 그 후 움직이지 않는다. 케이블이 길이의 탄성 단축에 의해 움직인다.
각도 불일치 범위 (mismatch): «텔레프레전스 슈트 – 안드로이드»의 피드백의 각도 전송 정확도이다. 오퍼레이터 손의 속도가 빨라진다- «각도 – 손의 속도» 백분율 정확도를 동일하게 한다. 즉 손 각도 전달의 정확도를 줄여 손속도 (전력) 전달의 정확도를 높인다. 각도 불일치 범위는 각도 가속도에 따라 선형으로 증가된다. 오퍼레이터가 비선형 플롯을 선택한다.
오퍼레이터(안드로이드) 손 움직임의 제동 가속도가 증가되며 – 알고리즘이 «손각도 전송 정확도 – 손 속도»의 전송 정확도를 증가시킨다.
«안드로이드- 오퍼레이터»방향일 경우 «손 각도 전송 정확도 – 손 속도»의 표는 손 각도 전송 정확도를 급격히 올려준다. 다른 직업 – 다른 차트.
안드로이드손의 각가속도는 마지막 2초동안 각가속도의 범위를 급격히 올렸다. 오퍼레이터 신호에는 이런 것이 없다 -> 소프트웨어가 각도 불일치 범위를 줄인다. «각속도 – 제어 지연 – 각도 불일치 범위» 알고리즘 선택.
«텔레프레전스 슈트 – 안드로이드 간의 피드백 각도 불일치 범위:
각도 불일치 범위가 낮을수록 안드로이드 정확히 느려지고 «오퍼레이터- 안드로이드» 패드백의 경직이 높아지다. 각도 불일치 범위 : 전력 (증가율 속도) 및 균형 값과 «정확도 – 전력» 균형 값, 모드 (지회제거자, 외과의사, 용접기사…) 값으로 되어 있다.
피드백 경직의 힘이 높은 경우 표면의 경도 또는 딱딱함을 느끼게 한다. 제동 가속의 임계값에서 소프트웨어는 텔레프레전스 수트의 각도 불일치 최소화 모드를 켠다.
각도 불일치 범위가 큰 경우 안드로이드가 더 빠르고 힘이 세다.
오퍼레이터 움직임이 빠르면 각도 불일치 범위가 커진다.
오퍼레이터는» 각속도 – 각도불일치범위, «제어 지연 – 각도 불일치 범위» 차트를 선택한다. 제어 지연이 또는 오퍼레이터 움직임의 각속도가 클수록 각도 불일치 범위도 커진다.
단단한 표면이나 물체가 딱딱하게 느끼지 않으려면:
텔레프레전스 슈트의 구동력은 인간의 근육보다 2배 강하다.
구동기의 제동속도는 0,1초이다.
오퍼레이터의 각속도가 증가하면 소프트웨어는 타이머로 아래 값을 올린다:
각도 센서의 폴링 레이트 (polling rate) (트래픽별);
제어 지연 줄이기 위한 각도 불일치 범위;
각가속도의 범위.
오퍼레이터 전력 또는 전력의 속도 증가되면 소프트웨어는 타이머로 아래 값을 올린다:
각도 센서의 폴링 레이트 (polling rate) (트래픽별);
제어 지연 줄이기 위한 각도 불일치 범위;
각가속도의 범위.
안드로이드 각도센터 조정: «외골격 – 안드로이드» 조정표는 안드로이드의 손의 각도 움직임의 스케일을 변경하여 오퍼레이터와 안드로이드의 손바닥이 동시에 만지도록 한다. 오퍼레이터의 손은 더 일찍 터치한 경우 – 손바닥이 움직이지 않고 그의 센서들이 안드로이드의 손을 오퍼레이터와 접촉할 때까지 움직이게 한다.
트랜지스터 드라이브 (Transistor drive) 에 의해 제어 지연은 0,02초 된다. 모터는 3상권선 플라이휠 로터를 회전한다. 플라이휠 로터 외부에는 자석이 있다.
플라이휠 로터의 권선이 쇼트 (not short out the winding) 되지 않은 경우 로터가 회전 불가능하다.
제어 신호는 플라이휠 로터 권선을 쇼트하여 그 안에 자석에서 전자기 유도 전류를 생성한다. 자기장은 플라이휠 로터와 스테이터 (stator, 고정자)를 결합시킨다. 권선의 2개의 트랜지스터 (교류)가 쇼트 (short)되면 클러치의 출력 토크는 1개의 트랜지스터의 출력 토크의 2배로 더 크다. 3상권선 – 트랜지스터6개; 클러치 출력 토크 옵션이 6개
트랜지스터 클러치 제어 신호는 트랜지스터 수, 주파수, 플라이휠 로터 권선의 쇼트 기한을 변경하여 플라이휠 로터와 스테이터의 0-100% 슬립을 제언한다.
단면 (sectional control) 제어: 로터의 위상 권선은 섹션으로 나뉜다. 소프트웨어는 단면 (sectional) 권선을 트렌지스터 직병렬 스위치로 인해 로터 권선의 전류 리액턴스 변경시키 최대 효율로 전기 재활성의 클러치의 출력 토크를 제어한다. 소프트웨어는 회전자와 고정자의 유도 저항이 같을 때 최대 출력 토크를 제공한다. 소프트웨어는 회전자의 위상 권선 유도 저항을 증가 (재생 효율 증가)하여 출력 토크를 줄인다.
트랜지스터 드라이브의 출력 토크 (torque output) 제어는 섹션 제어부터 시작하고 권선 쇼트로 끝낸다. 트랜지스터에 대한 신호는 회전하는 변압기이다. 3상 권선의 플라이휠 로터의 역전환온 (후진)에 의한 스테이터 (고정자)로 복귀: 전환( reverse) 필드가 플라이휠 로터의 움직임에 대해 반대방향으로 더 빨리 회전하며 스테이터를 복귀 시킨다.
"플라이휠 + 트랜지스터 클러치" 드라이브의 속도는 전기 모터의 3배로 더 높다. 플라이휠이 빠를수록 뉴턴의 법칙-2, 유도는 트랜지스터 클러치의 힘인 토크를 증가시킨다.
트랜지스터 클러치의 2초 시동 전력 (주변 속도에 비례)은 1에서 가속하는 전기 모터보다 5배 더 크다.
텔레프레전스 슈트 비동기식 드라이브 옵선 은 영구 자석이 필요 없다. 더 간단하다. Non 쇼트 (non short) 권선에 대한 자석 작용으로 인한 작은 공회전이 없다. 권선 회전수가 많아질수록 공회전이 더 높아진다. 농형 유도 전동기 (squirrel cage rotor). 비동기식 드라이브의 경우 나는 고전력 (초고전류)의
3상 비동기식 드라이브의 단순화된 정류를 발명했다. 다른 발명품과 같이 한국에서 특허를 받을 계획이다.
텔레프레전스 슈트는 트랜지스터 클러치를 통합하기 위해 최적화 되어있다. 피드백 소프트웨어는 케이블의 장력을 일정하게 유지하고 텔레프레전스 슈트의 탄성 변형을 선택하여 제어의 지연시간을 줄인다. 2Hz보다 신호의 변동이 더 높으면 클러치 (clutch)에 의해 그것을역 위상 (reverse-phase) 방식으로 없애게 한다. 소프트웨어는 양가속도보다 음가속도 신호에 대해 더 큰 이득, 감쇠를 전달한다 : 센서의 강화/ 감쇠 차트 설정.
드라이브 이득계수 (Drive gain ratio): XYZ최표에서 별도로 강화 차트 옵션 : 수평보다 위로 강화되는 것이 더 높다.
점진적 증폭은 작음 힘을 정확하게 가하고 무거운 짐을 들어 올린다 : 안드로이드가4키로까지 들어 올릴 경우 비례 이득은 1이고; 수직으로 수십 키로 들어 올릴 경우 – 강화율이 2~5이며, 수평으로는1.1이다. 부하를 수평으로 제동할 때 이득계수는 가속보다 2배로 더 높다. 무게가 많을수록 강화도 올라간다. 안드로이드는 비행장을 폭격할 때 미사일을 고정하여 비행기를 손상 시키지 않는다.
드라이브 덤핑 계수 (Drive gain ratio) - 드라이브 부분과 관련 질량의 관성 모멘트에 대한 드라이브 토크의 비율이다. 포스 피드백의 마스터 드라이브와 슬레이브 드라이브의 기생 관성 진동은 서로를 공명하게 증폭한다. 드라이브의 공진 주파수 비트이다.
덤핑 계수 증가 : 양쪽 드라이브에 스프링(드라이브 움직임의 양방향)을 설치하고 트랜지스터 드라이브 권선의 유도 저항을 몇 배까지 제어하면 드라이브 관성과 기생 피드백 진동을 감소하고 기생진동 주파수 (필터로 제거하기 더 쉬움)와 구동 효율을 증가시킨다. 유도 리액턴스 제어: 권선 섹션 스위치 (switch).
외골격 3D-cardan (카아던, 구동축):
카아던 축 -1 에다가 외골격이 부착된다. 시작 시 축은 수직과 등 (허리)에 대해 45° 기울어진다. 축의 가까운 끝은 아래쪽, 먼 쪽은 위쪽에 있다. 카아던 축-1 외부는 카아던 축-2의 하프링으로 (half-ring) 덮는다.
카아던의 외부 축-1(파이프)은 구동 상자의 일부이며 인체와 함께 회전한다. 카아던의 내부 축 1은 평면에서 카아던의 축 2의 하프 링 중앙에 대칭적으로 고정되어 있다.
카아던 축-1의 레이디얼 롤러 베어링은 레이디얼 하중을 유지한다. 축의 하중은 원주형 롤러베어링 2개가 유지하며 카아던 축1과 가로지르는 90° 각도로 공통 회전 축이 있다.
2개의 롤러베어링들이 엔드 형식 트랙에서 직경이 다른 2개의 디스크 사이에서 반대 방향으로 회전한다. 카아던 축-1 외부 뒤쪽끝에 여러 디스크가 있다.
프로그레시브 펜던트 (pendant) 는 롤러 베어링에 대해 더 작은 디스크를 눌러 틈을 없애준다 (소음). 카아던 축-1에 평행한 조립 축에 있는 이중 스러스트 롤러 베어링의 캔틸레버 축.
카아던 축-2의 세미 링에서 어셈블리 축이 왼쪽에 있다. 분해 : 스프링 클립을 풀고 이중 원두형 스러스트 롤러 베어링의 축을 조립 축에서 140° 돌리고 원두형 조인트의 외부 축-1을 뺀다.
카아던 축-2 는 시작 시 사람 뒤에 있는 하프 링은 방의 수직과 바닥에 대해 45° 기울어진다. 축의 가까운 끝은 아래쪽, 먼 쪽은 위쪽에 있다. 카아던 축-2는 하프 링의 뿔이 카아던 축-3 하프 링의 뿔과 연결되어 있다.
카아던 축 3 은 사람에서 가장 멀리 떨어져 있으며 축은 수직으로 45° 기울어져 있다. 축의 가까운 끝은 아래쪽, 먼 쪽은 위쪽에 있다. 텔레프레전스 수트가 방 구석에 있는 경우 카아던 축-3은 벽과 바닥(방의 큰 대각선을 따라)에 대해 45°의 각도로 돼 있다. 시작 시 하프 링의 평면은 방의 바닥과 등(허리)에 대해 45 ° 각도로 길어져 있다. L 자형 바닥 프레임의 모서리에 고정 된 축-K3안에 회전된다.
카아던의 모든 축들이 중량 중심에서 사람을 가로지른다. 카아던 축의 하프링들은 모서리가 둥근 사각형의 반쪽과 같다.
손, 다리의 구동기는 카아던 축-1 오른쪽과 왼쪽에 있는 서로 반대로 회전하는 2개의 전기 플라이휠 모터 (사람의 등 뒤에)에 의해 움직이게 된다.
카아던 기계적 자유 축의 고장 (failure of the axis of mechanical freedom; loss of mechanical freedom): 카아던 축 1-3이 일치되면 자유 1도잃게 된다. 그것을 막기 위해 외골격의 Active 3D-suspension 는 힌지 메카니즘을 통해 각도 센서의 수에 따라 가상 축-4를 시뮬레이션 한다. 축-4에서 축-1을 기준으로 한 트렁크의 클램핑 프레임은 최대 45°까지 양방향으로 회전된다.
시작 시 가상 축-4는 사람의 척추를 통과하는 수직면에서 축-1에 대한 90o도로 위치한다. 가상 축-4는 카아던 축들의 교차점을 통과한다.
각도 동기화 차트는 축-4를 카아던 축과 동시에 횐전한다. 카아던 축 1-3이 접근 시 사람을 수평 축에서 회전해야 한다. 가상 축4는 축 1-2-3과 동기적으로 X각도로 사람을 회전시킨다.
반대 회전의 3쌍의 전기 플라이휠 모터 (대직경; 축은 서로 수직임)는 플라이휠의 가속과 감속으로부터의 순간이 3D 카아던에서 사람을 회전시킨다. 변압기가 회전하며 3D 카아던 에너지 발생.
사람 등에 카아던 축1에는 드라이브 박사 안에 한 케이스에 3쌍의 전기 플라이휠 모터가 들어 있다 (3D카아던의 강성에 대한 요구 사항이 적음).
3D 카아던 각도센서(회전하는 변압기에서 폴링)가 있는 플라이휠 전기 모터의 피드백에 의해 사람이 각도 인식 시킨다.
시계 방향을 사람 회전: 틀레프레전스 슈트의 카아던 축1에는 소프트웨어는오른 발, 오른 다리에 관한 구동기의 플라이휠-1을 제동 토크 모드 (전기의 고정 축으로 플라이휠: 고정자는 내부에, 회전자는 외부에 있음)로 스위치 하며 사람을 카아던 축-1의 시계방향으로 회전시킨다.
플라이휠-1 전기 모터 (트랜지스터 클러치 모드)의 제동으로 재생된 에너지는 왼 팔과 다리의 구동기를 제어하는 반대 방향인 팔리이휠-2 전기 모터를 가속시킨다. 플라이휠-2 로터의 가속 순간은 또한 카아던 축-1에서 사람을 시계 방향으로 회전시킨다. 플라이휠 로터는 트랜지스터 클러치 모드에서 모터 모드로 또는 그 반대로 전환한다.
시계 반대 방향으로 사람 회전: 소프트웨어는 왼팔, 왼 다리의 구동기 관련 플라이휠 로터-2를 제동 토크 모드 (고정 축으로)로 전환하여 사람을 카아던 축-1에서 시계 반대 방향으로 회전시킨다.
플라이휠-2 전기 모터 (트랜지스터 클러치 모드)의 제동으로 재생된 에너지는 오른 팔과 다리의 구동기를 제어하는 반대 방향인 팔리이휠-1 전기 모터를 가속시킨다. 플라이휠-1 로터의 가속 순간은 또한 카아던 축-1에서 사람을 시계 반대 방향으로 회전시킨다. 전기 플라이휠 모터 (트랜지스터 클러치모드 베어링의 100% 효율) 간의 에너지 교환은 이론적으로 사람의 에너지 소비 없이 큰 과부하로 모든 방향으로 회전할 수 있도록 한다.
3D 카아던 축에서 일어나는 이러한 효과는 틀레프레전스 수트에 의해서 사람을 모든 방향으로 회전시키는 에너지를 수십 배로 줄이는 것이다. 이론적으로 에너지 소비는 0로 만들 수 있다. 에너지 소비 감소하기 위해 위상 권선의 유도 저항을 제어하면 된다. 전기 플라이휠 모터의 효율은 «가속 – 에너지 재생하는 감속» 모드인 로터와 스테이터의 유도 저항 비율에 달려 있다. 카아던 축1의 구동기 박스 안에 들어 있는 반대 방향으로 회전하는 플라이휠 전기 모터의 제동과 가속 모멘트로 인해 집 바닥으로 모멘트 없이 3D 카아던을 회전시킨다.
카아던 축-2 균형 : 회전 에너지 소비 감소하기 위해 카아던 축 -2는 하프 링의 뿔 끝에 있는 더블 위시본의 균형을 맞춘다. 대하중 (추)은 핸들링 (handling mechanism) 기기 끝에 있는 구동이다. 핸들링 (알고리즘)은 전기 플라이휠 모터가 카아던 축-2를 회전하도록 도와준다. 카아던의 제로 불균형.
카아던 축-1 균형 을 잡아주는 것은 인체의 클램핑 프레임의 Active 3D-suspension 이다. 사람의 질량 중심은 왼쪽으로 이동하면 액티브 3D펜던트가 구동기로 인해 사람의 몸을 오른쪽으로 움직이게 한다. 전기 없을 경우 텔레프레전스 수트가 전기 플라이휠 모터의 관성으로 최대 0,5 시간 동안 작동할 수 있다.
인체 클램핑 프레임의액티브 3D 펜던트 (Active 3D-suspension) 는 3개의 축 안에서 최대15cm의 진폭으로 안드로이드의 각가속과 선형 가속도, 진동을 시뮬레이션한다. 가상현실에서 궤도에서 우주 비행사의 하강, 렐리 레이서; 칼, 창으로 공격하기 등…
아드로이드가 방향 1을 향한 충격을 받은 경우 3D 펜던트는 사람에게 일련의 잛고 날카로운 진동같은 충격을 준다. 역 위상의 충격을 전달할 때마다 3D 펜던트는 일정한 제동 가속도로 사람을 반대 방향으로 천천히 이동시킨 다음 급격한 가속으로 사람에게 다음 충격을 전달하게 한다.
걷기, 달리기 : 오른발이 착지할 때 오른발의 드라이브가 오른발을 위로-뒤로 던지고 그다음 부드럽게 돌아간다.
인체 클램핑 프레임은 똑 같은3개의 펜던트 2단 레버 (lever)를 통해 구동기 박스와 연결되어 있다. 2단 레버 2개는 어깨 관절과 연결되어 있다. 2단 레버 1개는 3D 골반 관절과 연결되어 있다.
인체 클램핑 프레임의 2단 펜던트의 레버는 X 축 3개 + 구동기 박스의 고정된 축 Y – 1개 + 인체 클램핑 프레임의 고정된 축 Y 1개로 구성되어 있다.
인체 클램핑 프레임의 액티브 3D 펜던트는 (구동 박스에 있는) 케이블 구동 X-Y-Z으로 XYZ축 안에서 소포트웨어로 제어되는 거리 15cm까지 모든 방향으로 인체 클램핑 프레임을 이동 시킨다 (선형 가속 시뮬레이션 : 전력을 향한 급격한 동작 + 느린 후진).
클램핑 프레임의 X구동의 반동은 대하중 (추) X2으로 구동기 X2가 보상해 준다.
Y구동의 반동은 대하중 (추) Y2으로 구동기 Y2가 보상해 준다. Z구동의 반동은 대하중 (추) Z2으로 구동기 Z2가 보상해 준다. 대하중 (추) X2-Y2-Z2 구동기는 인체 클램핑 프레임의 3개의 3D센서로부터 피드백을 받아 가속을 보상하고 집의 바닥에 들어가는 것을 방지한다.
«밸런싱 모드» : 대하중 (추) X2-Y2-Z2 구동기는 인간의 움직임 때문에 발생되는 카아던 축의 불균형을 없애게 한다. 카아던 레이디얼 축 센서에서 불균형에 대한 신호.
액티브 3D 팬던트는 질량 중심 + 회전 중심 (CM + CR) 시스템의 기능을 시행한다. 이는 사람의 «질량 센터 + 회전 센터» 차트의 솔류션을 통해 팔, 다리 자세가 바뀜에 따라 변경 시킨다. 곡예(Acrobatics): 사람의 질량 센터 그룹에서 몸에서 앞으로 이동한다 – 3D 펜던트는사람을 뒤로 움직이게 하며, 사람의 질량 센터를 카아던 구동기와 연결시킨다.
오퍼레이터 발 클램핑 프레임에서 있는 발 미끄러짐 경보(Foot slip alarm)은 안드로이드 발의 동작을 오퍼레이터에게 전달한다. 자석이 모루에 동기적으로 타격하고 진동기-1은 안드로이드 발이 똑바로 움직이게 하고 진동기-2는 발가락이 옆으로 이동, 진동기-3은 발 뒤꿈치가 옆으로 이동하게 한다. 진동기 : 스틸링 파이프 안에 있는 자석 + 권선 2개+ 자석 좌우쪽의 스프링 2개 + 파이프 끝부분에 있는 모루로 구조되어 있다.
안드로이드 발이 오른쪽으로 움직이면 자석 (우측 권선에 의함)이 우측 모루를 타격한다. 타격의 힘은 슬라이등 속도에 비례한다. 권선 전류가 없으며 스프링은 자석을 파이프 중앙으로 되돌린다. 발이 오른쪽으로 슬라이딩하는 동안 같은 과정이 계속 이뤄진다.
안드로이드가 발뒷꿈치에 힘을 주지 않으면 뒷꿈치로부터 신호가 오지 않는다. 카아던 허용 각도보다 슬라이딩의 각도가 더 높으면 카아던이 오퍼레이터를 슬라이딩 방향으로 회전시킨다. 안드로이드 발가락에 세로, 가로 이동 센서와 뒷꿈치가 가로 이동 센서가 발 뒷꿈치에 설치되어 있다.
텔레프레전스 슈트를 사용한 선형 가속 시뮬레이션: 앞으로 달리면 Android가 뒤로 기울어진다. 안드로이드의 3D 자이로스코프 신호로 외골격은 오퍼레이터를 해당 각도로 다시 기울인다. 안드로이드를 제동할 때 외골격은 오퍼레이터를 앞으로 기울인다. 사람은 본능적으로 안드로이드의 올바른 자세를 유지하며, 몸의 각속도를 제로화 한다. 텔레프레전스 수트를 앞으로, 뒤소 900로 기울이면 수트는 최대 1g 가속도를 시뮬레이션을 한다. 원심 분리기 텔레프레전스 슈트는 장기간의 다양한 과부하, 큰 행성의 중력, 전투기 조종사가 느끼는 물리적. 열적. 정보적 과부하 그리고 궤도에서 우주선 하강의 시뮬레이션을 한다.
유턴할 때 안드로이드의 원심력을 시뮬레이션을 하는 것은 사람이 옆으로 기울이는 것이다. 무릎의 하부 각도 차이다.
보행 시 경사가 가파르지면 안드로이드의 수직 센서가 신호를 보낸다. 인체 클램핑 프레임의 각도 가속. 사람이 옆으로 넘어지지 않도록 본능적으로 안드로이드의 자세를 유지하고 인체의 각속도를 제로화 한다.
걷기, 뛰기, 점프 때 발이 바닥을 닿을 때 발의 구동기는 급격히 사람의 발을 위로 움직이게 해서 안드로이드처럼 발이 가해지는 하중을 느끼게 한다. 후진되는 펜던트의 속도가 느리다.
제동하는 버스에서 서 있는 안드로이드의 수직센서는 각도와 몸통 클램핑 프레임의 각속도를 전달한다. 앞으로 넘어지지 않기 위해 사람이 안드로이드 몸체의 각속도가 수직 센서에 따라 0 (영)이 될 때까지 자기 몸을 뒤로 기울인다. 버스가 가속할 때도 마찬가지다.
설정에 의해 각속도와 가속 범위는 제한된다. 소프트웨어는 안드로이드의 뛰는 속도가 증가되면 범위를 늘릴 것이다. 정확도 줄임 없이 피드백 속도 증가는 불가능하다. 인간의 가속. 반복성에 따른 «정확도 – 피드백» 균형.
텔레프레전스 슈트의 구동 그룹 은38개의 케이블을 제어한다. 2개의 긴 플라이휠이 사람 등과 평행한 수평 축 (카아던 축-1에 수직)으로 회전한다.
왼손, 왼발 드라이브의 플라이휠 축은 인간의 왼쪽 어깨 뒤에 있고, 오른 손과 오른발 드라이브의 플라이휠 축은 사람의 오른쪽 어깨 뒤에 있다. 오른쪽 플라이휠 내부에는 분할 구리 슬라이드 너트가 있는 고정 파이프- H가 있다.
레이디얼 틈 제로화 기기: 너트에는레이디얼 틈을 없애려면 컷을 따라 너트의 스피링 벤딩 시스템이 있는 컷이 있다. 그렇지 않으면 나사산이 축방향 힘에 의해 찢어진다.
너트 외부에는 영구 자석이 있다. 나사선과 축을 따라 움직이는 너트는 오른손의 케이블을 움직인다.
회전하는오른쪽 휠은 길이에 따른 3상 권선이 있는 19개 섹션으로 나뉘어 있다. 오른쪽 플라이휠의 3상 권선의 각 섹션에는 회전 시 쌍 너트의 영구 자석에서 유도 전류 생성; 권선이 트랜지스터로 쇼트된 경우.
«너트 – 3상 권선»의 각 쌍은 트랜지스터 클러치이다. 유도 전류는 링이 회전되지 않지만 너트 축을 따라 링을 밀어내어 나사를 회전시킨다. 너트의 축방향 변위력을 인간 어깨 외골격의 2D 힌지의 풀리 케이블에 전달하는 스러스트 베어링이다.
링에는 내부에 2개의 반대 방사형 융기가 있다. 2개의 케이블 (H 고정 파이프 내부 링의 돌출불에 부착됨)이 있는 H고정파이프의 길이 방향 짧은 (너트의 축방향 스트로크를 따름) 슬롯을 통한 이 돌출부는 사람 오른팔의 외골격의 2D 숄더 힌지의 풀리를 돌린다. 리버스 너트 (reverse nut)은 링이 후진한다. 구동기는 케이블이 짧은 이동인데 새 버전에서는 긴 이동 거리를 한다 (한국에서 특허 받을 계획).
제어 신호로 너트 회전 주파수를 제어하기 위해 권선을 트랜지스터로 쇼트시킨다.
트랜지스터 클러치 제어 신호는 3상 플라이휠 권선으로 클러치 너트 슬립을 0 – 100% 부드럽게 제어한다. 오른쪽 플라이휠 19개의 각 3상권선은 자기 진동 회로 고유하고 사람의 오른 손 (손가락 4개), 다리의 외골격의 19개 케이블을 움직이는 동축 (반대 픽업) 신호 케이블에서 들어오는 제어 신호를 고유한다.
트랜지스터 제어 신호(오른쪽 플라이휠 내부)는 회전하는 변압기에 의해 오른쪽 플라이휠로 전달된다.
케이블의 부하가 감소함에 따라 오른쪽 플라이휠의 3상 권선은 (플라이휠 DC 케이블에서 전원이 공급되는) 회전 반대 방향으로 회전 필드를 생성하여 너트를 되돌린다.
사람의 손 옆에 있는 손의 외골격 레버 시스템 : 팔꿈치를 무릎에 놓을 수 있다.
정류 후 트랜지스터 클러치의 권선에서 재생된 전기의 일부는 케이블을 0 위치로 되돌리는 역장 모드에서 트랜지스터 커플 링의 (플라이휠 DC 케이블) 권선으로 이동하며, 일부는 회전하는 변압기에서 에너지 텔레프레즌스 슈트로 간다.
핸드 드라이브 (손 구동기) : 구동기의 케이블은 오른쪽 외골격 어깨 관절의 수평 세로 (사람한테서) 축의 도르래 -1로 들어간 다음 외골격의 오른쪽 어깨 관절의 수평 – 가로 축의 도르래-2로 이동한다. 도르래-2에서 케이블이 도르래-3에 후진-아래로 (팔을 수직으로 아래로) 이동하며 오른쪽 어깨의 클램핑 프레임 중간에서 평행 이동된다.
도르래 3에서 케이블은 오른손 팔꿈치의 클램핑 프레임 상단에 축 4가 있는 도르래 4로 앞뒤로 (서있는 사람에서 수평으로) 이동한다. 액슬 3-4를 연결하는 레버 34는 액슬 2-3을 연결하는 레버 23과 길이가 같다. 팔뚝 클램핑 프레임의 상단 부분은 어깨의 별도 축에서 레버-23에 부착된다.
팔뚝 클램핑 프레임의 하부는 가변 길이 arm-R에 의해 arm-23에 연결된다. 레버-R은 긴 너트 내부의 나사이다. 긴 너트가 있는 공기 터빈은 텔레프레전스 수트를 시작하기 전에 팔뚝 클램핑 프레임의 위치를 팔꿈치 클램핑 프레임의 위치로 조정한다. 텔레프레전스 수트가 작동 중일 때 공기 터빈은 일반적으로 작동하지 않는다.
팔뚝, 팔꿈치, 손바닥 클램핑 프레임의 길이를 조정하기 위해 팔뚝 클램핑 프레임을 arm-23에 연결하는 가변 길이다.
팔, 팔꿈치, 손바닥의 클램핑 프레임의 길이를 맞추기 위한 요소:
1. 팽창식 팔뚝 클램프 프레임을 팔뚝 클램핑 프레임에 연결하는 스프링 장착 평행사변형 연결;
2. 팽창식 팔꿈치 클램프의 프레임을 팔꿈치의 클램핑 프레임에 연결하는 스프링 로드 평행사변형 연결.
레버-R에는 액츄에이터 토크가 없다. 모든 레버는 인간 근육의 힘(작은 힘)에 의해 움직이며, 손 외골격의 경첩 축과 손 관절 축의 오정렬을 보상하고, 클램핑 프레임 사이의 거리 변화를 보상한다. 팔뚝, 팔꿈치, 손바닥. 축의 오정렬, 허벅지, 다리 아래쪽, 발의 클램핑 프레임 사이의 거리 변화도 유사하게 보정된다. 드라이브는 텔레프레전스 수트의 클램핑 프레임에 순간 (모멘트)와 각도만 공급한다.
내가 발명한 클램핑 프레임의 길이를 조정하고 외골격의 힌지 축과 인간 관절의 축 정렬을 자동으로 조정하는 다른 다기능 메카니즘은 텔레프레전스 수트를 너무 단순화 하여 이에 대해서 한국에서 특허를 받을 계획이다.
풀리-4에서 케이블은 오른쪽 클램핑 프레임의 낮은 팔꿈치 힌지에 위치한 풀리-5(축은 풀리-4의 축과 평행)로 내려간다. 도르래 5에서 케이블은 도르래 6으로 이동하며 축은 팔꿈치의 세로 축과 평행하다.
풀리-6의 축은 팔꿈치 클램핑 프레임의 바닥에 고정된다. 도르래 6의 케이블은 오른손 팔꿈치의 클램핑 프레임의 팔꿈치 아래 관절의 도르래 7(평행축)으로 이동한다.
도르래-7의 축-7은 도르래-6의 축-6보다 허벅지에 더 가까운 허벅지 (사람이 서 있음)에 위치한다. Axes-5-6-7은 오른손 팔꿈치의 클램핑 프레임으로 하나의 견고한 구조로 연결된다. 도르래-7에서 케이블은 이 평면 위의 손바닥 위쪽 평면에 평행한 축-7에 수직으로 위치한 축-8이 있는 도르래-8로 이동한다. 도르래 8의 축 8은 외 장갑의 클램핑 프레임에 고정되어 있다.
도르래-8에서 케이블은 손바닥 손가락의 지골-1 클램핑 프레임으로 이동한다. 지골-1의 클램핑 프레임은 팔뚝과 팔꿈치의 클램핑 프레임을 연결하는 레버 시스템과 유사하게 지골-2의 클램핑 프레임에 연결되어 축의 오정렬과 클램핑 사이의 거리 변화를 보상한다. 팔을 움직이는 것을 방해하지 않도록 다리 뒤에 있는 다리 외골격의 레버 시스템, 수직, 수평, 가로 분할을 수행한다.
14개의 케이블(오른쪽 플라이휠의 케이블 7개 + 왼쪽 플라이휠의 케이블 7개)은 다리의 외골격이 있는 끝 부분에 골반 밸런서의 중앙 경사(앞으로 위쪽으로 45° 기울어짐) 축의 풀리를 회전시킨다.
힙 밸런서의 축 방향 하중은 공통 축에서 90° 각도로 교차하는 2개의 원두형 롤러 베어링을 유지한다. 그들은 끝 트랙에서 직경이 다른 2개의 디스크(골반 밸런서의 아래쪽 베어링에서) 사이에서 반대 방향으로 회전한다. 프로그레시브 스프링 펜던트는 롤러 베어링에 대해 더 작은 디스크를 눌러 방음 위한 틈을 제거한다.
골반 클램핑 프레임 (HIP CLAMPING FRAME) 은 내가 발명한 케이블 도르래 메커니즘에 의해 골반 클램핑 프레임에 연결되어 수직- 수평(뒤로 기울어진) 가로 꼬기를 수행할 수 있다. 오른쪽 허벅지의 클램핑 프레임의 힌지 (가로 수평 축)의 풀리-H1에서 케이블은 레버-H12에 고정 된 축-H2의 풀리-H2 (평행 축)로 앞뒤로 이동한다.
오른쪽 허벅지의 클램핑 프레임의 힌지(가로 수평축)의 도르래-H2에서 케이블은 고정된 축-H3(무릎에서)의 도르래-H3(평행축)으로 전진 및 하강한다. 레버-H23.
축-2-3을 연결하는 레버-H23은 축-1-2를 연결하는 레버-H12의 길이와 같다. 허벅지 클램핑 프레임의 상단 부분은 상단 허벅지에서 별도의 축으로 레버-H12에 부착된다.
허벅지 클램핑 프레임의 하부는 가변 길이의 레버-HR(긴 너트 내부의 나사)에 의해 레버-H12에 연결되어 있다. 베어링의 긴 너트는 공기 터빈에 의해 회전되어 시작하기 전에 허벅지 클램핑 프레임의 위치를 종아리 클램핑 프레임의 위치로 조정한다.
허벅지, 다리, 발의 클램핑 프레임 길이를 조절하기 위한 레버-H12와 허벅지의 클램핑 프레임을 연결하는 가변 길이 레버-HR로 한다.
허벅지. 종아리. 발의 클램핑 프레임 길이 조정 요소:
1. 스프링 장착(Spring-loaded) 평행사변형 연결은 팽창식 허벅지 클램프 프레임을 허벅지 클램프 프레임에 연결한다;
2. 스프링 장착(Spring-loaded) 평행사변형 연결은 팽창식 종아리 클램프 프레임을 종아리 클램핑 프레임에 연결한다.
HP 레버에는 액추에이터 토크가 없다. 모든 레버는 인간 근육의 힘(작은 힘)으로 움직여 다리 외골격 경첩 축과 허벅지, 종아리, 발 관절 축의 오정렬을 보상하고 클램핑 프레임 사이의 거리 변화를 보상한다.
레버-H23 축-3(무릎에서)은 레버-H34와 연결되어 있다. 레버-H34는 액슬-4를 발 클램핑 프레임에 연결한다. 종아리 클램핑 프레임의 상부는 종아리 상부에 있는 별도 축의 레버-H34에 부착된다.
몸통 클램핑 프레임에 등을 대고 수평으로 위치한 허벅지 클램핑 프레임의 골반 클램핑 프레임 안장에 앉는다. 팔걸이(팔꿈치 클램핑 프레임)에 팔꿈치를 놓고 녹색 버튼을 누른다. 사람의 손가락, 손, 발의 클램핑 프레임의 팽창식 클램프는 공기를 팽창시킨다다.
드라이브(공압 터빈 + 나사 너트)를 통해 인간 관절의 축과 클램핑 프레임의 힌지를 정렬하는 메커니즘은 클램핑 프레임의 길이를 조정하고 개인의 개별 치수에 맞게 조정해 준다. 그 다음 손가락, 손, 발의 클램핑 프레임의 팽창식 클램프를 공기로 팽창시킨다.
팽창식 클램프: 외부 카메라-2 안에 카메라-1 있다. 카메라-1은 클램핑 카메라의 클램핑력을 조정한다. 카메라 2는 클램핑 프레임 클램프의 환기 시스템의 공기 유량을 조절한다. 카메라 2에는 많은 공기 구멍이 있다.
균일한 압력 체인 클램프 (Uniform pressure chain clamp): 체인 클램프 레버 풀리-1-2-3-4-5-6은 팔 (다리)을 케이블의 표준 힘으로 고정시킨다. 레버-풀리크-1는 섹터 케이블 풀리의 직경이 크다. 레버 풀리-2의 경우 케이블의 부채꼴 풀리 직경은 레버 1-2의 총 길이가 레버 풀리-1의 길이보다 몇 배나 더 작다. 나머지 레버 풀리 직경에 대한 전체 길이의 유사한 비율은 체인 클램프의 각 레버 풀리가 하나의 공통 케이블로 핸드 (다리)에 동일한 가압력을 제공한다(스프링이 공통 2번째 케이블을 통해 레버를 해제).
구동기는 스프링 레버 메카니즘을 통해 점진적 설정으로 공통 케이블을 이동시킨다 (모토크로스 바이시클의 리어 서스펜션과 같음). 각 레버는 팽창식 부분으로 다양한 사이즈의 팔 (다리)을 붙잡을 수 있다.
팔(다리)을 감싸면 체인 클램프의 끝이 칼로 클램핑 프레임의 중앙 빔의 칼과 맞물린다. 모든 모양의 팔(다리)의 원형 둘레 + 팽창 가능한 부분의 압력은 제어 지연을 최소화 한다. 엘보에 있는 사람의 팔: 팔꿈치 클램핑 프레임. 팔꿈치 클램핑 프레임의 표준 힘 센서를 사용하여 액추에이터는 팔뚝 클램핑 프레임의 길이를 설정한다. 팔뚝은 관절에서 2개의 클램프로 고정된다.
발 외골격 : 발 클램핑 프레임의 표준 센서 힘으로 액추에이터는 발 클램핑 프레임의 슈를 사람의 발에 눌러 종아리 클램핑 프레임의 길이를 설정한다. 아래쪽 다리는 조인트에서 2개의 클램프로 고정된다. 신발은 발의 상단을 덮는다.
신발이 있는 풋 클램핑 프레임 드라이브는 센서 힘 표준에 대해 뒷꿈치 스톱에 대해 발을 누른다. 종아리 클램핑 프레임 센서의 힘 표준에 따라 액추에이터는 허벅지 클램핑 프레임의 길이를 설정한다. 허벅지는 관절에서 2개의 클램프로 고정된다.
텔레프레전스 수트 클램프의 모든 액추에이터: 공압 터빈 + 나사 너트. 공기 터빈은 클램프 환기 시스템에서 공기를 가져온다. 1 bar의 공기가 클램프의 구멍으로 들어간다. 팔, 다리, 몸통을 위한 클램프 구멍 열의 제습 공기. Row-1은 압축 공기를 클램프로 전달한다. Row-2는 땀을 뿜어낸다.
온도 센서, 피부 습도 센서에 따라 팔과 다리, 인체 클램핑의 압력, 온도, 공기 습도 설정 : 공기가 열 펌프를 냉각시키고 드라이브의 공기 냉각 시스템을 가열한다. 손가락, 팔, 다리, 몸통의 클램핑력에 대한 알고리즘 선택.
체인 클램프 레버 1-2-3-4는 골반을 케이블 강도 표준에 고정시킨다. 골반 클램핑 프레임의 왼쪽 체인 클램프는 30 ° 각도로 오른쪽 아래로 구부러져 왼쪽 상단 골반 뼈에서 앞쪽으로 골반을 클램핑한다. 오른쪽은 마찬가지다.
몸통 클램핑 프레임의 2- 팔 센서의 힘 표준에 따라 액추에이터가 길이를 설정한다. 몸통 클램프 프레임의 체인 클램프는 겨드랑이, 전면, 어깨 상단에 사람을 고정한다.
인체 클램핑 프레임 (TORSO CLAMPING FRAME) 은 중앙 3D 골반 경첩으로 골반 클램핑 프레임에 연결되어 있다. 골반 경첩의 수직 축: 인간 척추의 축과 평행하다. 중앙 골반 관절: 상부 골반 뼈의 상단 라인, 뒤쪽의 허리 근처. 중앙 골반 관절의 3축이 교차한다.
안장: 골반 클램핑 프레임의 몸체 부분. 중앙 골반 관절은 몸통 클램핑 프레임의 수직 축에서 오른쪽, 왼쪽, 앞쪽, 뒤쪽으로 기울어져 있다.
텔레프레전스 수트의 안장은 다음과 같은 경우를 제외하고 발에서 사람의 무게를 제거하지 않는다. 안드로이드가오토바이를 탄 경우 텔레프레전스 수트의 안장 액츄에이터는 발로 오는 안드로이드의 무게(발의 힘 센서)와 관련하여 사람의 무게 대부분을 안장으로 전달한다. 오토바이를 타는 안드로이드가 점프하면 무중력 상태의 3D 가속도 센서가 안장력을 0으로 만들다.
가상 제어 시스템 (virtual control system): 손의 일반 제스처는 인체에 대해 움직이지 않는 가상 테이블 (모든 것이 헬멧에 표시되고 촉각적으로 현실과 구별할 수 없음)에 있는 가상 컴퓨터를 켠다.
안드로이드 본체에는 가속도와 각속도 (TV 카메라의 자이로 안정화)에 대한 4개의 3D 센서가 있다. 파워 이퀄라이저 (POWER EQUALIZER) 휠 (4개 휠: 강도 증가율의 4개 범위)이 있는 텔레프레전스 수트의 가상 제어 시스템에서 오퍼레이터는 강도 범위의 증폭, 강도 증가율에서 추가 증폭 계수를 설정한다. 위험한 물체(지뢰, 발사체 ...)의 무게 범위에 대한 게인 손실 설정(음향 신호). "지뢰 찾기" 모드: 파워 이퀄라이저가 수직으로 분할되고 수평으로 음수 이득이 있으면 손의 감도가 증가된다. 이퀄라이저를 진동 (VIBRATION EQUALIZER) 모드로 전환: 진동의 주파수 대역 필터링, 손가락, 팔, 다리, 몸통의 충격 및 각도 가속.
안드로이드 타격 - 텔레프레전스 수트는 오퍼레이터에게 작용하는 충격 가속의 제한으로 안드로이드의 새로운 위치로 부드럽게 전환할 수 있게 해준다.
법적 청구로부터 제조업체 보호: 텔레프레전스 수트 레코더 (기록): 각도, 각가속도, 전력, 전력 증가율, 진동 진폭이 기록된다. 법률: 텔레프레전스 수트 관련하여 인증된 등록 사이트 사용.
택티파워 엑소 글러브 (tactile-power exo gloves): 드라이브는 클램핑 프레임을 팔꿈치와 비스듬히 구부린다. 외장갑의 클램핑 프레임 센서의 전력 표준에 따라 드라이브는 팔꿈치의 클램핑 프레임 길이를 설정한다. 팔꿈치는 조인트에서 2개의 클램프로 고정된다.
드라이브는 핑거 클램핑 프레임을 손바닥의 평면에 대해 비스듬히 구부린다. 손가락 지골-1의 클램핑 프레임 센서에 따르면 드라이브는 외 장갑의 클램핑 프레임 길이를 설정한다. 손바닥 클램핑.
드라이브는 손가락의 지골-2를 지골-1에 비스듬히 구부린다. 지골-2 클램핑 프레임의 센서 힘 표준으로 드라이브는 지골-1 클램핑 프레임의 길이를 지골-1 클램프로 설정한다.
드라이브는 손가락의 지골-3을 지골-2에 대한 각도로 구부린다. 지골-3 클램핑 프레임의 센서 힘 표준을 사용하여 드라이브는 지골x-2 클램핑 프레임 길이를 설정한다.
지골-2 클램핑. 지골-3에는 손가락 모양과 비슷하고 힘센서가 있는 택티 골무 (tactile thimble) 를 입힐 수 있다. 힘 표준에 따라 센서는 지골 프레임-3의 길이를 설정한다. 손가락으로 로드를 구부리고 케이블을 구부리면 오퍼레이터가 구동력 제한을 설정한다. 각 손가락에 대해 오퍼레이터의 손끝에 별도로 작용하는 외장갑의 장력 (늘림 메커니즘)은 자동 장력 안정화에 의해 조절된다.
지골-3의 택티 골무에는 핑거 패드용 촉각 픽셀 전극 매트릭스가 있어 안드로이드 손가락의 촉각 감각을 사람에게 전달한다. 안드로이드의 촉각 픽셀은 열 흐름(Sapper는 열 흐름에 따라 재료를 결정함), 힘 (압력)을 전달한다.
픽셀 온도: 펠티에 효과 때문이다. 안드로이드 손의 촉각 픽셀의 온도와 주변 온도의 변화율에 의한 열 흐름 기호이다.
전력, 온도, 열 흐름의 촉각 픽셀 증폭 수준은 가상 제어 시스템에서 직경이 다른 휠과 표면 릴리프를 사용하여 오퍼레이터가 설정한다.
텔레프레전스 수트의 오퍼레이터에게 안드로이드의 손가락이 느끼는 표면 기복을 전달한다. 촉각 픽셀의 매트릭스-촉각 골무의 전극에 의해 전달될 것이다.
역전 진동:
1. 전극의 맥동 전압이 급격히 상승하고 천천히 떨어지고 피부가 부풀어 오른 느낌
2. 천천히 상승하고 빠르게 하강하는 맥동 장력, 피부가 오목한 느낌
증가된 전류에 의한 촉각 픽셀-전극의 매트릭스는 피부에 공급되는 전압의 주파수를 변경함으로써 외부 환경의 힘의 경련성 근육 수축을 시뮬레이션한다. 전류 강도, 전압 설치.
손가락은 쐐기 모양의 촉각 골무로 인해 틈을 선택한다. 손톱 끝 부분에서는 골무가 손가락에 닿지 않는다. 촉각 골무의 반원 표면은 손가락 끝에 닿는다.
각 촉각 픽셀에서 상부 금속 전극 (손가락 패드에 닿음)은 온도 및 전력 픽셀의 공통 전극이다. 전기적으로 절연된 회로이다.
촉각 골무의 상부 (손톱) 부분은 촉각 골무의 하부에 평행 사변형 메커니즘에 의해 부착된다. 작업을 시작하기 전에 사람이 손가락을 촉각 골무에 삽입한다.
촉각 골무의 아래쪽 부분을 만질 때 액추에이터는 촉각 골무의 위쪽 부분을 손가락에 눌러 간격을 선택한다. 힘 센서는 드라이브를 멈추고 위치를 고정 시킨다.
엑소 장갑으로 손가락을 클램프하는 힘의 조정은 센서-Z (손가락 지골의 세로 축을 따라 손가락 끝에 작용하는 힘을 측정함)와 피드백으로 케이블에 의해 다음 원리에 따라 수행된다.
1. 센서-Z의 전력은 일정하다. 센서-Z의 구동은 센서-Z의 힘의 상한 또는 하한 임계값을 초과하는 전환을 켜고 역 전환은 꺼진다.
2. 액추에이터는 공통 케이블인 풀리를 통해 센서-Z의 신호에 따라 손가락의 측면 클램프의 가압력을 일정하게 유지한다.
3. 손가락이 닿으면 드라이브가 센서-Z를 끄는다. 일반적인 케이블인 도르래를 통해 횡력을 고정한다. 센서-Z 드라이브를 끄지 않았다. 손가락 사이의 각도 차이가 0인 신호를 끈다.
손바닥 클램핑 프레임은 3D 힌지로 팔꿈치 클램핑 프레임에 연결되어 있다. 안드로이드 손바닥의 드라이브는 표면을 쥐거나 쉴 때 오퍼레이터가 0,2초 이상 지속되는 노력으로 개별 손가락을 강화할 때까지 손가락의 모든 지골 센서의 힘 값을 동일하게 한다.
별도의 D 채널이 있는 손바닥 클램핑 프레임 3D 진동기는 오퍼레이터에게 손바닥에 작용하는 Android의 진폭, 주파수, 진동 벡터 (3D 가속도 센서)를 제공한다. Channel-D는 오퍼레이터에게 손가락의 촉각 채널보다 더 많은 비트 깊이, 진폭 및 주파수 범위를 전달한다. 오퍼레이터는 안드로이드 손바닥을 놓고 차량의 엔진, 공작 기계가 작동하는지 여부를 결정할 것이다. 자동차가 도로를 달리고 있는지 여부.
지뢰 찾는 군인 (Sappers) : 증가된 촉각, 온도 분해능의 매트릭스가 있는 외 장갑(exoglove): 지뢰 찾는 군인(Sapper)은 열 흐름 센서로 터치하여 금속 및 기타 재료를 구별해준다.
헤드 드라이브는 가상 현실 헬멧을 머리에 내리고 클램핑 프레임에 고정시킨다. 인간-1에게는 보이지 않는 어깨 부분이 잘린 반투명 구형 3D 화면 뒤에 32개의 피드백 카메라가 원격 텔레프레전스 수트-2를 입은 인간-2에게 인간-1의 얼굴를 3D 이미지로 전달한다.
각 TV 카메라는 얼굴의 정사각형 부분을 보여준다.
TV 카메라의 경우 반사된 산란광이 있는 백라이트 램프가 제공되어 있다. 각도, 헬멧의 얼굴 조명 유형, 색상 변경, 각 LED 램프의 밝기 - 소프트웨어 시나리오 갖추어 있다. 3D 화면, 피드백 카메라, 램프는 펄스 시간에 별도로 작동된다.
3D 화면의 반경은 30cm이다. 손의 외골격은 그림을 망치지 않는다. 헬멧 스크린은 눈에서 멀수록 "실제 물체까지의 거리 - 스크린까지"의 차이로 인한 배멀미가 적다.
측면의 구형 3D 스크린은 위에서 작업할 때 손이 스크린에 닿지 않도록 10cm 평평하게 만들어졌다.
고개를 돌리는 대신, 안드로이드는 앵글 카메라, 라인, 매트릭스의 픽셀의 자이로 안정화 스위칭(수평, 수직)을 가지고 있다: 비디오 압축을 위한 배경 픽셀의 위치는 일정하다. 각 초점 범위에 대한 한 쌍의 스테레오 카메라가 갖추어 있다.
3D 사운드 (3D-SOUND): 128개의 반구가 있는 헬멧의 각 귀에 관해 구형 헬멧 실드의 직경 2mm 구멍을 통해 소리가 들어간다. 구멍은 3D 화면의 LED 픽셀에 의해 내부에서 조명되는 2mm 길이의 튜브이다. 임계값보다 소리 볼륨이 클 경우 : 소프트웨어는 다른 홀의 사운드를 각 구멍의 사운드에 연결시킨다. 저음은 전자 밸브에 의해 팔(다리) 클램프의 환기 공기에 의해 나온다. 텔레프레전스 수트에서는 3D사운드 필요한 이유는 수천 킬로미터 떨어진 곳에 오퍼레이터가 조종하는 안드로이드가 옆이나 뒤에서 달리는 자동차에 치지 않도록, 또한 소리의 백터를 들어서 넘어지지 않도록 그러한 역할을 해 준다.
3D 사운드: 전면에 4개의 수직 스피커 + 후면에 4개의 수직 스피커가 사운드 전송하고 즉각적인 총 벡터를 알려 준다. 3D 헤드폰에서 8개의 스피커(각 귀에 4개)는 귀 평면의 반대 대각선 (수직에서 45°)으로 향하는 4개의 사운드 벡터를 알려준다.
3D 사운드를 전송(녹음)할 때 3D 마이크 1개 또는 스테레오 마이크 3개가 필요하다. 결합된 스테레오 마이크가 중간 고주파수의 위상 편이를 제거할 때: 모든 채널에서 3D 사운드의 출력 신호는 동일하고 순간적인 사운드 레벨만 다르므로 3D 사운드 시스템 트래픽은 7.1 사운드보다 ~6배, ~4 5.1사운드보다 4배 더 작다.
1개의 총 사운드 채널 + 3개의 차이 사운드 채널은 즉각적인 총 사운드 벡터를 제공한다.
사운드 소스 (사운드 전송 벡터)의 위치 - 신호 극성별: 공기 압축의 최대 반파 디지트의 측면 (3D 각도)에서 사운드 소스 (사운드 도달 벡터)이다. 극성은 소리 도착의 반구이다.
사운드 전송 벡터의 각도는 마이크의 멤브레인 (음향 전송 반구)의 압축 (공기) 반파장의 진폭 비율을 기반으로 한다.
3D 마이크: 최대한 가까운 3개의 상호 수직 진동판 + 별도의 모노 저주파 마이크로 구조되어 있다.
수평 사운드 전송 각도: 신호의 축적 (각 주파수 범위에서 별도의 타이머) 후 수직 멤브레인의 차동 신호를 기반으로 한다
소리의 수직 전송 각도: 3D 마이크의 수평 멤브레인 신호와 수직 멤브레인의 전체 신호 간의 차이다. 차이가 나는 신호는 사운드 벡터의 정확도에 따라 아래쪽에서 위쪽으로 잘린다.
안드로이드는 머리 왼쪽에 3D 마이크가 있고 머리 오른쪽에 3D 마이크가 있다. 또는 왼쪽에 결합된 2개의 스테레오 마이크 + 오른쪽에 결합된 2개의 스테레오 마이크도 가지고 있다. 신호에서 고주파 에너지의 진폭 차이 (음이 마이크에 전송하는 시간) 및 백분율 (2개 신호의 비교) 측면에서 음원의 범위이다.
텔레프레즌스 슈트의 가상 제어 시스템에서 소리의 전방 반구, 1개의 볼륨 휠 및 2개의 밸런스 휠(수평 사운드 밸런스 + 수직 사운드 밸런스 + 사운드 밸런스 "음의 전방 반구 - 소리의 후방 반구"), 후방용 소리의 반구 2 밸런스 휠(수평 사운드 밸런스 + 수직 사운드 밸런스)을 가지고 있다.
바퀴의 이동 방향은 사운드 밸런스 조정 방향 및 사운드 레벨 증가와 일치한다. 위험한 환경에 대한 군용 안드로이드의 반응을 위해 바퀴로 사운드 전송되는 벡터를 신속하게 선택할 수 있다.
안드로이드의 3D 마이크의 주파수 특성, 감도의 차이는 소프트웨어에 의해 보상되어 있다. 3D 마이크 오류: 다른 3D 마이크는 알려진 음원의 사운드 주파수 균형을 참조 표준과 비교하여 거리를 계산한다. 범위: 사운드 곡선의 모양에 따라 음원의 볼륨이 더 많은 경우 - 마이크 사운드의 사인 곡선 (개별 주파수)이 충격파의 Z-차트에 더 가깝다.
Z-차트에 대한 근접도는 커패시터-1에서 상위 주파수 사인파의 정류된 1/4-1-4의 누적, 커패시터-2에서 상위 사운드 주파수 정현파의 정류된 1/4-2-3의 누적을 결정한다. 반주기의 가장 높은 지점에서 정현파의 1/4 경계이다. 시간 t 이후 커패시터-1-2의 전하 차이는 음원까지의 거리에 비례된다.
로봇 텔레제어: 아래와 같은 사항 때문에 멀미, 메스꺼움, 현기증, 오퍼레이터 피로가 생길 수 있다:
1. 고속, 카메라 각도의 각진동의 진폭. 해결책은 아래와 같다 :
a) 로봇의 카메라 각도의 광학 각도 안정화 (자이로스코프에 의한) 시키기;
b) 소프트웨어는 균일한 각속도를 텔레비전 카메라의 시선 각도에서 순간적인 점프로 대체한다. 정지된 배경, 각속도 부족으로 오퍼레이터의 상태 향상
2. "눈 - 헬멧 화면" 거리와 "실제 눈 - 물체" 각도 거리의 불일치. 해결책은 다음과 같다: 헬멧의 화면이 오퍼레이터의 눈에서 멀리 하게 한다.
텔레프레전스 수트의 인터넷 트래픽:
1. 텔레프레전스 수트의 전력. 각도 채널의 총 트래픽은 56 Kbps(7 Kb/s) 이다.
각도 채널, 각 속도: 34 Kbps이며, 샘플링 주기 0,02초; 각 각도당 평균 7비트 및 각도당 5비트이다. 케이블 변위 센서의 신호에 따른 40개 케이블의 각도: 각도에서 24 Kbps + 각속도에서 10 Kbps. 하중을 받는 케이블의 신장은 결정 테이블에 의해 보상된다. 팔, 다리의 외골격의 각속도가 클수록 각도 전달의 빈도가 커진다.
강제 채널, 강제 증가율: 22 Kbps: 샘플링 주기 0,02초. 평균적으로 40개 케이블에서 강도 6비트 및 강도 증가 속도 5비트는 40개 케이블에서 강도 12 Kbps + 강도 증가 속도로 10 Kbps으로 되어 있다.
자이로스코프 채널: 1,95 Kbps: 3개의 카아던 각도, 샘플링 주기 0,02초. 평균적으로 모서리당 7비트는 세 모서리에 대해 1,05 Kbps으로 되어 있. 3 각속도(6비트) 카아던, 샘플링 주기 0,02초는 0,9 Kbps으로 나온다.
몸통 가속 채널 (액티브 3D 펜던트의 9개 채널): 2,3 Kbps: 9자리, 샘플링 주기 0,02초, 5비트
2. 비디오 채널 1 Mb/s: 압축된 3D 그림, 3D 사운드
3. 택티 (tactile)채널 :
양손: 38 Kb/s: 한 손바닥에 5000개의 촉각 픽셀, 3비트, 0,05초 샘플링 속도
양 발: 3,8 Kb/s: 500 촉각 픽셀, 3비트, 0,05초 샘플링 속도
나머지 본체: 1-1,5 Mb/s
화면 해상도 - 프레임 속도 ("SCREEN RESOLUTION - FRAME RATE") 알고리즘 은 인터넷 트래픽이 부족한 경우 화면 해상도 - 프레임 속도 ("SCREEN RESOLUTION - FRAME RATE") 비디오 균형을 트래픽에 맞게 조정한다. 해상도를 줄여 프레임 속도를 높인다. 그림에서 선의 픽셀 속도가 감소하면 알고리즘이 그림 해상도를 높이고 프레임 속도를 줄인다.
비디오 밸런스, 스테레오 베이스, 버퍼링이 가상 제어 시스템에 따르다.
텔레프레전스 및 가상 현실 수트의 경우 5G 네트워크는 지연 시간이 짧은 세그먼트를 할당한다.
작업이 끝나면 오퍼레이터는 빨간색 버튼을 누른다. 텔레프레전스 수트는 수직으로 고정되고 클램프는 풀려 3D 화면이 위아래로 움직인다
신호 차단 보호: 피드백이 중단되면 안드로이드 (Android) 는 다음에 의해 제어된.
질량 중심과 관성 벡터에 의한 세로 자동 조종 장치 (AUTOPILOT LONGITUDINAL) 는 안드로이드의 종방향 안정성을 유지하고, 안드로이드 보행의 매개변수(가속도, 하강, 상승 설정)를 유지하고 정지하며, 안드로이드의 머리와 손바닥에 있는 카메라의 종-수평 가속도를 제한한다.
크로스 자동 조종 장치 (AUTOPILOT TRANSVERSAL) 는 Android의 측면 안정성을 유지하고, 걷기, 부하 들을 때 안드로이드(Android)가 옆으로 기울어진 이동 (가속도에 대한 반응 설정, 경사진 보행 표면 설정)을 제한한다. 안드로이드 헤드와 손바닥 TV 카메라의 크로스-수평 가속을 제한한다.
수직 자동 조종 장치 (AUTOPILOT VERTICAL) 는 안드로이드의 TV 카메라를 수직으로 안정화 시키고 안드로이드의 머리와 손바닥의 TV 카메라의 수직 가속을 제한한다.
위성 간 전환으로 인한 신호 중단 방지: 병렬 연결: 위성 A는 아직 신호 전송을 완료하지 않았을 때 위성 B는 신호를 복제하여 연결해진다.
전력 (파워) 센서 : 케이블의 전력을 측정하는 롤러 베어링의 스프링이 없는 롤러는 케이블의 맨 끝에 위치한다. 케이블의 탄성 변형은 롤러 액슬 암의 로드 셀에 미치는 영향이 적다. 각 케이블에는 케이블 탄성 변형 지연 테이블이 있다.
복제된 전력 센서 신호 - 드라이브에 있는 트랜지스터 클러치의 현재 전류 강도: "각도 - 시간을 곱한 전류 강도" 차트.
중파워 센서 프로그레시브 배틀 스케일: 직관적으로 선형 스케일은 텔레프레전스 수트, 안드로이드의 프로그레시브 비트랄 스케일이 필요하다.
텔레프레전스 수트 강도 센서의 1비트 신호 강도 단계. 스케일의 시작 부분에서 1비트는 작은 숫자이다. 안드로이드(Android)의 손가락을 너트에 가볍게 터치하면 힘의 단계가 작다.
너트에 대한 손가락의 클램핑 력이 증가하면 각 후속 힘 단계는 더 커진다. 힘 단계 간의 힘 차이는 동일한 비율로 증가된다.
비트 보정: 안드로이드 센서의 비트가 텔레프레전스 수트 센서의 비트와 같지 않은 경우 "안드로이드 비트 - 텔레프레전스 수트 비트" 대응 차트가 작동시작된다 : 생리학 성질을고려하여센서의 비트 숫자를 조정한다.
좌표 보정: 텔레프레전스 수트는 작동하는 동안 자동으로 보정된다. 팔과 다리의 외골격의 광전지에 자외선 펄스가 통과하는 시간에 따라 각도, 주요 이동 지점 보정해 준다.
자외선 (간섭 없음) 거리 센서는 "케이블 장력 - 케이블 움직임 - 각도" 차트, 팔과 다리의 외골격 좌표 차트를 보정한다. 손가락, 손, 발의 클램핑 프레임 경첩에 있는 자외선 LED 방출기.
인체 오른쪽에 클램핑 프레임의 광전지 2개 있으며, 왼쪽에 있는 벨트 전면, 팔꿈치의 상부 경첩 아래에 있다. 인체 오른쪽에 클램핑 프레임 수신기의 2개 광전지가 있고, 등 뒤에 왼쪽, 팔꿈치 상부 관절 아래에 있다.
몸통 클램핑 프레임의 오른쪽, 왼쪽 어깨 전면에2개 광전지가 설치되어 있다. 오른쪽 허벅지의 클램핑 프레임에서 오른쪽 상단에서 앞에 2개의 UV LED, 뒤에 벨트의 오른쪽 광전지용 UV LED가있다.
허벅지 클램핑 프레임 앞 아래에 전면 벨트 광전지용 UV LED가 설치되어 있고 오른쪽 종아리의클램핑 프레임 밖에 밸트용 오른쪽 광전지 UV LED가있다.
풋 클램핑 프레임의 발가락에는 하단 레그 클램핑 프레임의 측면 중앙의 광전지용 UV LED 설치되어있으며 자외선 LED는 교대로 펄스를 방출한다.
최대 3개의 간격을 둔 광전지까지의 펄스 비행 시간에 따른 LED 좌표는 LED에 의한 펄스 방출 지연 값을 빼고, 광전지에 의한 펄스 접수 지연 값을 뺀다. 손가락의 좌표는 핸드 클램핑 프레임의 좌표계에서 가져온 것이다.
텔레프레전스 수트의 케이블, 제어 지연 및 텔레프레전스 수트 경제성을 줄이기 위한 고속 사운드의 Android 높은 모듈러스(탄력 없음) 가지고 있다. 케이블의 장력을 증가하면 물체의 모양, 표면 구조에 대한 감각은 높아진다.
집에서 15분 안에 사람이 컨테이너에서 가정용 텔레프레전스 수트를 조립할 수 있다. 모든 조정과 설정은 소프트웨어에 의해 4초 이내에 가능하다. 텔레프레전스 수트: 높이 2,42m, 길이 - 2,42m, 너비 2,42m, 최대 신장 1,82m. 어린이: 1,9m x 1,9m x 1,9m, 어린이 최대 신장 - 1,6m이다.
참호전 군용 안드로이드 (ANDROID – soldir of trench warfare): 전장에서 동등한 힘을 가진 국가. 도시 내 전쟁이 벌어지면 100미터를 통과하려면 수만 명의 군인이 희생된다. 군인 생명은 US $ 100만달러; 안드로이드으로 충분하다.
최대 6000km에 떨어져 있는 곳에 있는 텔레프레전스 수트를 입은 오퍼레이터들은 안드로이드를 제어한다. 해캥 당할 율은 거의 없다. 대화 암호 + 채널 암호화 + 알 수 없는 압축 알고리즘... 협소한 방향의 빔이 있는 전력 경쟁 조건에서 2km에서 의사 무작위 주파수를 감안할 때 전자파의 모든 주파수를 지속적으로 차단할 가능성은 낮음 송신기, 수신기의 호핑.
모듈레이팅 코너 리플렉터 (modulating corner reflectors) (나의 발명품) : 군용 안드로이드의 좁은 방향인 (narrow-directed) 적외선 레이저 빔에 의한 피드백으로 번호가 달린MCR(Modulating Corner Reflectors)은 전면, 후면, 측면, 상단에 있다.
액추에이터가 없는 MUO, 안정화 시스템은 중계기 레이저 빔의 반사 에너지를 변조하여 텔레프레전스 수트에 안드로이드 센서의 신호를 전달한다.
2개의 긴 레이저 빔으로 안드로이드와 통신한다. 빔-1 길이는 광전지용이며, 빔-2 길이는 변조 코너 반사기의 응답 신호용으로 한다. 안드로이드(Android)는 피드백에 에너지를 낭비하지 않고 변조에만 에너지를 낭비한다. 광전지, 모서리 반사경에는 필터가 있다.
직선 빔 대신에 많은 벽에서 반사된 빔인안드로이드(Android)중계기의 긴 체인을 사용할 수 있다. 통신 영역을 떠나는 군용 안드로이드는 배낭에서 리피터를 둔다. 안드로이드 벨트의 코일에서 풀린 광섬유는 리피터와의 통신을 유지한다. 10-20m 거리에서 벽 뒤에 안드로이드와 벽을 통한 무선 통신, 엑스레이 통신 한다.
피드백은 송신기 전력을 증가시키고 수신기 감도를 감소시켜 적의 전자기 방해 전파를 차단한다.
도시 속 군용 안드로이드의 전투: 빔을 반사하는 표면을 선택하는 AI가 있는 중계기 드론의 협빔 적외선 레이저 통신. 적외선 간섭: 테라헤르츠, X선 통신.
관성 내비게이터, 열화상 카메라의 이미지 (빔의 전달 각도)를 사용하여 소프트웨어는 포함할 안드로이드의 변조 코너 반사기를 찾는다. 적의 방해 - 텔레프레전스 수트를 입은 오퍼레이터는 변조 코너 반사경의 번호를 바꾼다.
인공 지능 (AI)이 있는안드로이드(Android): 오퍼레이터의와 피드백이 없을 경우안드로이드(Android)가 실행을 중지하고 타이머에 따라 잠자기 상태로 전환한다. 템플릿 반응 - 사용자 설정. 패턴: 인식, 주어진 좌표에서 적군 병사의 파괴, 레이저 또는 무선 인식기 "아군 또는 적군"에 응답이 없을 때 시간 섹터.
초강력 송신기에 전력을 공급하기 위해 출력에서 병렬로 연결된 저소음 가스 터빈 발전기 - 좁은 방향의 전자기파의 벽 메가와트를 통해 안드로이드에 공급된다. 군용 안드로이드들은 그것을 거부하지 않는다.
1. 고전압 마이크로 프로세서
2. 전선은 접지된 동축 케이블 또는 광섬유로 교체되어 있다 (단면적이 1sq.mm인 광섬유는 100kW의 전력을 전송함)
3. 네 개의 화면 (스크린) 뒤에 안드로이드의 마이크로프로세가 위치함한다. 구리로 만든 스크린-1-2. 구리 Screen-1과 Screen-2 사이에 100000V의 극성 정전압 (스크린 사이의 유전체를 극성화하기 위해)은 고도에서 열핵 폭발의 감마선에 의해 공기 분자에서 전자를 날려 버리는 고도 전위차로부터 보호된다. 500km의 거리에서 X선 피드백에 의해 원자의 전자를 날려 버린다. 스크린-1-2 사이에는 유전율이 높은 유전체가 전자기 폭탄 파동의 뾰족한 피크를 원만하게 한다.
스크린-3 - 페라이트 - 와전류 보호.
Screen-4 - erbium 167Er - 감마 및 X선으로부터 마이크로프로세서 보호.
스크린-5 - 가돌리늄 157Gd - 중성자 폭탄으로부터 마이크로프로세서 보호.
살아있는 군인은 오디오 정보 채널의 노이즈 내성에서 안드로이드(6개의 간격 마이크)에게 진다.
돌격 라이트는 안드로이드가 아닌 살아있는 군인의 눈을 멀게 한다. 편광(오른쪽, 왼쪽 회전 + 2개의 선형 축의 원형 편광), TV 카메라의 스펙트럼 필터. 필터 알고리즘: 비디오 신호의 고주파수의 최대값 + 그림의 가는 선의 전체 길이의 최대값.
기관총으로부터 광학 장치를 보호하기 위해 군용 안드로이드에는 초경질 거울 잠망경으로 된 텔레카메라가 있다. 표면 장력 계수가 높은 가용성 합금으로 반사 코팅된 텅스텐-몰리브덴 합금으로 만든 거울이다. 스크래치가 생긴 경우 전류를 거울을 통해 지나가게 한다. 가용성 코팅이 녹고 스크래치가 경화된다.
텔레카메라 잠망경의 상부 미러는 점진적이다 (모토크로스 오토바이의 뒷바퀴 펜던트와 같이 강성이 부드럽게 무한대로 증가함). 펜던트 (2개의 자유 축)는 총알과 파편의 충격을 약화 시킨다.
전쟁에서 전자기, 소리 센서, 지진파의 센서는 승리의 열쇠이다.
AI가 0,003초 (교환 거래 로봇의 주기) 이하인 군용 로봇의 "센서 트리거 - 무기에서 발사"의 성능, 0,3초에서 3초 사이의 살아있는 군인: 시간, 피로에 따라 다르다… 인간 군인과 군용 아드로이드가 갑작스럽게 맞대면 손실율은 100:1이다.
영상 전문가들은 현재 전투에서 최고 위치와 안전성이 높은 안드로이들을 찾아 관련 오퍼레이터와 연결 시킨다. 전투가 끝나면 남은안드로이드는 «죽은» 안드로이드를 수집해서 나중에 새로운 안드로이드를 다시 만든다. 전투에서 수백만 개의 안드로이드를 가질 수 있다. 안드로이드 디자인은 최적화되어 있어 안드로이들이 스스로 안드로이드를 조립할 수 있다.
안드로이드에게 에너지, 탄약을 공급하는 급유자인 안드로이드의 의무:
1. "급유자 안드로이드" 인식 신호, 응답 신호 수신
2. 군인 안드로이드에서 배터리가 있는 상자 배낭을 벗어주고 새 배터리, 탄약을 상자 배낭에 넣어 메는다.
현실과 가까운 환경 속에 아바타 군사 사이트는 실제 참가자 수만 제한되지만 모든 규모의 전투를 훈련시킬 수 있다 (집을 떠날 필요 없음). 소프트웨어는 액추에이터, 센서를 제한하여 부상을 시뮬레이션 한다.
멀티플레이어 온라인 전쟁/ 챔피언십 게이머-오퍼레이터. 전문가들이 각 플레이에 대한 평가해서 챔피언십 결과에 따라 용병 신분과 지급이 정해진다.
심해 작업 : 심해 5~6km에 희토류 매장량이 세계 매장량보다 1,000 배 더 많다. 일본은 희토류금속, 메탄 하이드레이트, 석유, 가스와 같은 해저 자원 개발을 위한 국가 프로그램을 채택했다.
21세기: 심해 기업 사이트에서 한국 근로자, 엔지니어들이 텔레프레전스 수트를 입고 위성 통신을 통해 선박의 광섬유 케이블로 수천 개인 안드로이들을 동시에 제어한다 (각각 1~2Mb/sec). 안드로이드 배터리, 1.5V 소캣, 비접촉 전자기 충전기.
여행사이트: 세계 어느 곳이든, 심지어 마리아나 해구까지 가는 리얼 여행. 타임 머신 : 역사에 일어난 모든 사건에서 참석 가능, 역사적 캐릭터와 의사 소통: 배우, 사이트의 봉사자, 캐릭터의 컴퓨터 설정들이 그 역할을 한다.
가상 세게 프로토콜 (Virtual world protocol) 은 개인의 시뮬레이터를 네트워크에 연결한다. 돈을 낸 사용자들이 유명인의 시물레이터와 의사소통 할 수 있고 여행이나 섹스를 할 수 있다.
은하제국의 멀티플레어 스타워즈 (Multiplayer Star Wars of the Galactic Empires) : 수십억의 사용자들이 동시에 같은 온라인 게임을 한다.
봉사자들은 인터넷으로 다양한 사이즈의 홈용 안드로이드 인형을 제어한다. 유료 여배우, 배우. 검색장에서 6000 km 내에서 아바타 근로자를 찾을 수 있다. 기록 장치.
세계 어디에서도 원격 근무 가능. 원자력 발전소와 위험 산업 분야 근무 가능, 전쟁. 재난이 일어난 곳에 외과수술을 할 수 있다.
자율 탱커, 컨테이너트럭 보호 : 해적이 여러 통신 위성의 협소한 광선을 통해 공격할 때 함선 경로에 가장 가까운 경비 사무소는 텔레프레전스 수트로 안드로이드 병사를 깨워 공격을 격퇴 시킨다.
시그널 : 홈보안 안드로이드의 아바타 운영자는 집에 들어간 강도를 때리고 경찰인 안드로이드 차가 도착할 때까지 히터 파이프에 강도를 수갑으로 감금 시킨다.
용접 안드로이드는 용접, 절단, 진공 속에서 전자선으로 고정밀 절단 관련 비용을 수십배로 절감한다. 레일 위 트롤리에 있는 용접할 물체는 에어록으로 이동한다. 밀폐도어 (hermetic doors)가 열리며, 트로리가 진공방에 들어간다. 나가는 것은 반대 순서로 수행된다. 옵션 : 아르곤 또는 이산화탄소 (배기 가스) 용접 공장.
열 안드로이드 (Thermal Android): 금속 제련, 고온 기술 과정이 열 (온도)이 교환되는 보온 출입구 있는 단열된 직업장에서 이뤄지면 매우 경제적이다. 근로자들은 단열 직업장에서 일하는 (금 + 이리듐 광택 합금으로 처리되어 광선의 에너지 반사) 안드로이드를 제어한다.
외과 – 마이크로 안드로이드 (Microandroid – surgeon) 은 팔, 다리 외에 꼬리가 있는 안드로이드이며 꼬리는 양방향 피드백 긴 안테나이다. 금도금 실이다.
마이크로 안드로이드 에너지 보급:
1. 엑스레이;
2. 테라헤르츠 빔;
3. 초음파
혈관 안에 마이크로 안드로이드 이동 :
1. 차트에 따라 이동된 지점에 초점을 맞춰 비대칭 (가파른 앞전, 진동 반주기의 완만한 뒷전)된 전자기장이 에너지를 공급하여 마이크로안드로이드를 움직이게 한다.
2. 차트에 따라 이동된 지점에 초점을 맞춰 비대칭 (가파른 앞전, 진동 반주기의 완만한 뒷전)된 초음파장이 에너지를 공급하여 마이크로안드로이드를 움직이게 한다. 외과 마이크로 안드로이드는 혈액응고, 암 종양을 제거하고 바이러스 또는 방사성 주사를 투입하여 암 종양을 제거하고 기타 수술을 한다. 또한 종양 분석 결과에 대해도 무선 메시지 (용해 나사가 혈관 벽에다 길고 유연한 안테나를 부착함)를 보내고 방사성 주사를 투입하고 줄기세포로 부러진 척추의 찢어진 신경근을 치료해 준다…
무선 전자 전투 수단에 대한 보안: Android 제어는 X선, 적외선, 테라헤르츠, 자외선 범위에서 복제되어 있다. 안드로이드 경비원의 엑스레이 피드백은 군사 시설을 보호할 수 있다. 홈 시큐리티 안드로이드는 스마트 홈의 AI를 제어한다.
법에 따라 텔레프레전스 수트 소유자는 «텔레프레전스 슈트 – 안드로이드» 에 대한 등록된 암호화 피드백 보안 통신을 사용한다. 피드백 팀은 의사난수 (pseudorandom)번호, 명령의 시작 표시와 명령 끝 코드를 갖는다. 다음 팀에는 다른 번호, 암호 + 명령의 시작과 끝의 표시를 가지고 있다. 신호 일부, 신호간 이동에 관한 허용 시간.
타임 레코더에서 안드로이드가 이전 메시지를 수신하는 방향.
동적 암호는 날짜, 시간에 연결되어 있다. 거짓 명령이 나오는 로봇의 안테나 섹션이 연결과 해제된다. 주파수 의사난수의 전환은 동적 암호로 이뤄진다. 다양한 방향에서 들어오는 신호의 중계소들은 신호 변수 지연의 동적 암호로 방위 측정기를 중단시킨다.
해킹 방지 : 텔레프레전스 수트 보안 컴퓨터는 해커가VR수트를 입은 사람에게 해칠 위험율 0로 하게 한다. 보안 컴퓨터는 어떤 다른 컴퓨터와 연결되어 있지 않고 피드백 또는 인터넷에 연결되어 있지 않으며, 텔레프레전스 수트의 정보 시스템은 서로 격리되어 있다. 형법에 대한 책임 : 영토를 벗어나는 행위 ; 불법 운영 ; 신분증 위조 ; 국가 암호 위조 ; 프록시 서버 사용 ; 경찰-안드로이드에 대해 전자기 간섭 사용과 너무나 밝은 라이트 (카메라 사진에 불을 밝힘) 사용.
안드로이드는 국가 기관이 알고 있는 통제 차단 코드로 제공되어 있다. 경찰인 안드로이드가 사용하는 무선 채널은 협소하게 표적화된 레이저 통신으로 인해 간섭으로부터 복제되어 있다.
텔레프레전스 수트덕분에 의사는 환자 있는 집에 업무하는 홈용 안드로이드 몸에 즉시 이동될 수 있다. 텔레프레전스 수트는 홈용 재활 (마비) 장치이다.
나는 트리거 컴퓨터를 발명한 게 아니다.
컴퓨터 IP시스템은 메머리 들 필요하다. 소프트웨어의 신뢰성은 기존 컴퓨터보다 높다. 소프트웨어 개발 시간이 10배 단축된다.
컴포터가 트리거 없기 때문에 금방 켜진다. 모든 솔류션의 아키텍처 갖추고 있다. 명령 세트가 최대 최소화되어 다양한 세대의 하드웨어와 소프웨어 호환성 문제를 없어지게 한다. 프로세서는 컴퓨터 폭탄 사용을 못하게 한다. 구조에서 무한히 반복되는 요소 그룹으로 반영된다. 소프트웨어 코드는 기능을 숨기지 않다.
코드로 인해 일어나는 작업이 모호하지 않으며, 기호의 단일 조합으로 이뤄진다. 그래서 해킹 당한 일도 줄어든다. 코드 버그의 확률은 1,000 배 적다. 프로세서는 0~2300oK의 온도 범위 내에 작동할 수 있다 (반도체 필요 없음). 운영 체제 시뮬레이터를 통해 기존 소프트웨어와의 호환성.
정보 처리하는 병령 채널의 수는 무제한이며, 소프트웨어로부터정해진다.
나는 발명, 디자인, 인공지능 분야에 세계 챔피언이다. 이 말에 대해서는 한국 정부와 한국 고용주에게 책임 질 수 있다.
토마스 에디슨.
institutrobotov.ru 2005-2023
20.10.2021г Перевод статьи на корейский язык с проверкой текста носителем языка выполнен агентством b2bperevod.ru
Это перевод старой версии статьи за 20.10.2021
Последняя версия статьи здесь: institutrobotov.ru
Old english version for 30.03.2021: androiduniversity.com
vk.com/cybersuit vk.com/kopea.rabota
저는 모스크바에 있는 일본-러시아 회사인 AAT에서 일합니다. 대한민국에 연락이 급히 필요합니다! 나는 이체에 대해 시장 가격으로 연락처를 지불할 것입니다. 연락 조건(계약)을 명시하십시오. robotsoldier@yandex.ru 로 이메일을 보내거나 +79055453610 으로 전화하세요. 최신 버전의 기사가 한국어로 번역된 직후인 2023년에 저는 대한민국에 옵니다.
Я работаю в японско-российской фирме ААТ в Москве. Мне крайне важно, срочно нужен контакт в республике Корея! Я буду оплачивать контакт по рыночным ценам за перевод. Изложите ваши условия контакта (контракта). Мне срочно нужен контакт!!! Напишите на robotsoldier@yandex.ru или позвоните на +79055453610
Не знаю кому звонить или писать, буду очень рад за звонок или письмо. Пока нет ни одного контакта. Если будет – уберу это сообщение. Я приезжаю в республику Корея в 2023г сразу (зависит от времени вылета в авиабилете) после перевода на корейский язык последней версии статьи.
The figures of the author. The author has 1000 unpatented and 5 patented inventions. The latter are as follows: patents for Invention No. 2159501RU - electrical follower drive, No. 2168640RU - Air-Cooling System of Internal - Combustion Engine Utility from Brighton's cycle, No. 2170372RU - Connecting Rod of Internal - Combustion Engine, No. 2171184RU - Vehicle Body Stabilization System; No. 2263814RU - Turbine. I am able to make up to 7 inventions a day.
Telephone: +79055453610 Email: robotsoldier@yandex.ru
Ниже русская версия переведенного на корейский язык текста (сверху):
ДОМАШНИЙ КОСТЮМ ТЕЛЕПРИСУТСТВИЯ управляет в радиусе 6000км реальным роботом-андроидом, аватаром сайта виртуальной реальности. Без костюма телеприсутствия невозможен самоокупаемый бизнес колоний Марса, Луны, планет. Он даст работу миллиардам человек, в миллиарды раз увеличит число межконтинентальных денежных переводов, позволит космическому бизнесу производить миллиарды раз больше чем на Земле.
Костюм телеприсутствия – экзоскелет с пропорциональными датчиками сил, углов и приводами рук, ног внутри 3D-кардана с датчиками углов, приводами + 3D-видео шлема + 3D-звук.
ЭПИДЕМИИ: костюм телеприсутствия – медпомощь миллионам людей городов смертельной эпидемии: лучшие специалисты в образе андроидов работают в лабораториях, больницах города.
Человек жмет датчики силы экзоскелетов рук (ног) человека. Датчики включив привод убегая обнуляют силу от человека, двигая руками (ногами) андроида до порога разности «угол руки андроида – угол руки человека».
Приводами экзоскелетов внешняя среда управляет человеком если его сила меньше внешней.
ОДНОДАТЧИКОВОЕ УПРАВЛЕНИЕ: привод держит постоянной силу датчика силы руки (ноги) костюма телеприсутствия. Привод включает переход за верхний (нижний) порог датчика силы. Обратный переход порога выключает привод. 2-й датчик силы обратному движению руки (ноги) не нужен.
ДВУХДАТЧИКОВОЕ УПРАВЛЕНИЕ: привод включает превышение порога разности сил датчика сгибания руки (ноги) и датчика разгибания руки (ноги) костюма телеприсутствия. Обратный переход порога выключает привод.
СКОРОСТЬ ПРИВОДА КОСТЮМА ТЕЛЕПРИСУТСТВИЯ ПРЯМО ПРОПОРЦИОНАЛЬНА:
1. скорости роста силы
2. величине перехода за порог датчика силы руки (ноги) костюма телеприсутствия
Однодатчиковое управление: с ростом силы датчика сгибателя руки (ноги) сила датчика разгибателя обнулится (мала). Нет: отказ датчика. Аналогично у сгибателя.
Отказ двухдатчикового управления: включится однодатчиковое управление.
Работа в обоих режимах: 2 датчика сгибателя + 2 датчика разгибателя = 4-кратное дублирование датчиков костюма телеприсутствия. Диагностика: софт прозвонит входы, выходы, голосуют 4 канала с разными кодом, протоколом.
Мала разность сил пар датчиков – колебания гасит алгоритм «разность сил – скорость привода»: меньше разность – меньше скорость привода.
Софт ограничит силу в тактильных пикселях ладони андроида. Установки диапазона приоритета силы тактильной матрицы ладони андроида: работа с хрупкими, непрочными предметами. Диапазон превышен: приоритет уйдет в силовую обратную связь.
Без датчиков силы больше расход энергии, амплитуда паразитных колебаний: совпали углы – сила прижима, захвата колеблется 0-100%: рука раздавит груз. Техника безопасности требует датчики силы в исполнении костюмами телеприсутствия (командировка) супружеских обязанностей.
Вес экзоскелетов рук, ног компенсируют пружины: с цифр обратной связи привода софт вычтет цифру датчика силы пружины по синусам 2-х углов наклона экзоскелетов рук, ног к вертикали.
Вес экзоскелетов рук, ног компенсируют приводы: по выходной цифре-К двухосевого (две оси от вертикали) датчика силы в общей оси шкивов, приводы натягивают параллельные верхние ветви тросов шкивов силой превышающей силу нижних ветвей тросов шкивов на цифру-К умноженную на косинус угла «трос – вертикаль».
Инерцию экзоскелетов рук ног компенсируют по закону-2 Ньютона F=ma Вместо массы-m подставляем цифру-К умноженную на косинус угла «трос – вертикаль» и получаем конечную силу верхних ветвей тросов шкивов, которой привод компенсирует массу, инерцию экзоскелета.
Момент инерции экзоскелета с 3D-карданом компенсируют по разности (по силе тока транзисторных муфт) момента инерции «человек + экзоскелет + 3D-кардана» и момента инерции без человека.
Калибровочная таблица «экзоскелет – андроид» меняет андроиду масштаб углового перемещения рук оператора чтоб ладони андроида, оператора соприкоснулись одновременно. Соприкосновение ладоней оператора раньше – его ладони стоят, их датчики двигают руки андроида до соприкосновения с силой оператора.
ЗАДЕРЖКА УПРАВЛЕНИЯ АНДРОИДОМ – время корректировки движений андроида по циклу «движение оператора – увидеть или тактильно почувствовать выполнение движения андроидом – корректирующее движение оператора – выполнение движения андроидом», равное времени трехкратного прохода сигналом расстояния «костюм телеприсутствия – андроид» + 3 аппаратные задержки.
6000км от костюма телеприсутствия до андроида суммарное время трехкратного прохода лазерного сигнала (радиосигнала) обратной связи 0,04сек + 3 аппаратные задержки по 0,02сек: задержка управления андроидом 0,1сек.
Силовая обратная связь «костюм телеприсутствия – андроид»: в обе стороны: угол, угловая скорость, сила, скорость роста силы. Больше скорость роста силы – больше коэффициент усиления. Для уменьшения задержки управления привод дергает трос в разы (по сигналу скорости роста силы) сильнее сигнала, затем не двигает: трос двигает упругое сокращение длины.
Диапазон рассогласования (несовпадения) углов – точность передачи углов обратной связи «костюм телеприсутствия – андроид». Ускорение движения руки оператора растет – алгоритм уравняет процентные точности «угол – скорость руки» – уменьшит точность передачи угла руки для роста точности передачи скорости (силы) руки. Диапазон рассогласования углов линейно растет с угловым ускорением: оператор выбирает нелинейные графики.
Тормозное ускорение движения руки оператора (андроида) растет – алгоритм увеличит точность передачи угла руки таблицей «точность передачи угла руки – скорость руки». В направлении «андроид – оператор» таблица «точность передачи угла руки – скорость руки» более резко увеличивает точность передачи угла руки: разные профессии – разные графики.
Угловое ускорение руки андроида резко превысило диапазон угловых ускорений за последние 2сек, в сигнале оператора такого нет – софт уменьшит диапазон рассогласования углов. Выбор алгоритмов «угловая скорость – задержка управления – диапазон рассогласования углов».
Диапазон рассогласования углов обратной связи «костюм телеприсутствия – андроид»:
1. меньше диапазон рассогласования углов – андроид точнее медленнее, больше жесткость обратной связи «оператор – андроид». Диапазон рассогласования углов: по величине силы (скорости роста) и балансу «точность – мощность», по режиму (сапер, хирург, сварщик…)
2. высокая жесткость силовой обратной связи передает ощущение твердости или жесткости поверхностей: с порога тормозного ускорения софт включает минимальное рассогласование углов костюма телеприсутствия
3. больше диапазон рассогласования углов – быстрее, сильнее андроид
4. быстрее движения оператора – больше диапазон рассогласования углов
5. оператор выбирает графики зависимости «угловая скорость – диапазон рассогласования углов», «задержка управления – диапазон рассогласования углов»: больше задержка управления или угловая скорость движений оператора – больше диапазон рассогласования углов
Чтоб твердые поверхности, предметы не ощущались упругими:
1. силы приводов костюма телеприсутствия вдвое сильнее мышц человека
2. быстродействие торможения приводов не хуже 0,1сек
С ростом угловой скорости оператора софт по таймеру увеличит:
1. частоту опроса (по трафику) датчиков угла
2. диапазон рассогласования углов для уменьшения задержки управления
3. диапазон угловых ускорений
С ростом силы оператора или скорости ее роста софт по таймеру увеличит:
1. частоту опроса (по трафику) датчиков сил, углов
2. диапазон рассогласования углов для уменьшения задержки управления
3. диапазон угловых ускорений для уменьшения задержки управления
КАЛИБРОВКА УГЛОВЫХ ДАТЧИКОВ АНДРОИДА: калибровочная таблица «экзоскелет – андроид» меняет андроиду масштаб углового движения рук чтоб ладони андроида, оператора соприкоснулись одновременно. Соприкосновение ладоней оператора раньше – его ладони стоят, их датчики двигают руки андроида до соприкосновения с силой оператора.
Задержку управления 0,02сек имеет ТРАНЗИСТОРНЫЙ ПРИВОД: мотор вращает маховик-ротор с 3-фазной обмоткой. Снаружи маховик-ротора статор с постоянными магнитами. Не закороченные обмотки маховик-ротора не вращают ротор.
Сигнал управления замыкая обмотки маховик-ротора создает в них ток электромагнитной индукции от магнитов статора. Магнитное поле сцепляет маховик-ротор с статором. При замыкании 2-х транзисторов (переменный ток) обмотки выходной момент муфты сцепления вдвое больше, чем при 1 транзисторе. 3-фазная обмотка – 6 транзисторов: 6 вариантов выходного момента муфты сцепления.
Сигнал управления транзисторной муфтой сцепления меняя число транзисторов, частоту, период короткого замыкания обмоток маховик-ротора управляет 0-100% пробуксовкой сцепления маховик-ротора с статором.
СЕКЦИОННОЕ УПРАВЛЕНИЕ: фазные обмотки ротора разделены на секции. Софт параллельно-последовательным транзисторным переключением секционированных фазных обмоток ротора меняет индуктивное сопротивление фазной обмотки ротора, управляя выходным моментом муфты сцепления с регенерацией электроэнергии с максимумом КПД. Максимум выходного момента софт дает при равенстве индуктивных сопротивлений ротора, статора. Софт уменьшает выходной момент ростом (растет КПД регенерации) индуктивного сопротивления фазной обмотки ротора.
Управление выходным моментом транзисторного привода начинают с управления секциями, затем замыкание обмоток. Сигналы транзисторам – вращающийся трансформатор. Возврат статора реверс-включением (задний ход) 3-фазных обмоток маховик-ротора: реверс-поле вращается против движения маховик-ротора быстрее его, возвратит статор.
Быстродействие привода «маховик + транзисторная муфта сцепления» втрое больше электромотора. Чем быстрее маховик тем больше закон-2 Ньютона, индукция усилят момент, мощность транзисторной муфты сцепления.
ДВУХСЕКУНДНАЯ СТАРТОВАЯ МОЩНОСТЬ (пропорциональна окружной скорости) транзисторной муфты 5 раз больше разгоняющегося с нуля электромотора.
ВАРИАНТ АСИНХРОННОГО ПРИВОДА КОСТЮМА ТЕЛЕПРИСУТСТВИЯ не требует постоянных магнитов; проще: нет небольшого мешающего холостого момента от действия магнитов на разомкнутые обмотки: больше витков обмотки – сильнее холостой момент. Ротор беличья клетка. Для асинхронного привода я изобрел упрощенную коммутацию большой мощности (сверхбольшие токи) трехфазного асинхронного привода. Буду с остальными изобретениями патентовать в Корее.
Костюм телеприсутствия оптимизирован на унификацию транзисторных муфт. Софт обратной связью держит постоянным натяжение тросов, выбирает упругие деформации костюма телеприсутствия, уменьшая задержку управления.
Датчиков силы колебания сигнала больше 2Гц противофазно гасят муфты сцепления. Софт дает сигналам отрицательного ускорения больше усиления, затухания чем сигналам положительного ускорения: установки графиков усиления, затухания датчиков.
КОЭФФИЦИЕНТ УСИЛЕНИЯ ПРИВОДА: выбор графика усиления раздельно в координатах XYZ: усиление вверх больше чем в горизонтали.
Прогрессивное усиление точно дозирует малую силу, поднимет тяжелый груз: андроид поднимает до 4кг – пропорциональное усиление 1; десятки килограммов по вертикали – усиление 2-5, по горизонтали 1,1. На торможении груза по горизонтали усиление вдвое больше, чем на разгон. Больше вес – больше усиление: андроид не повредит самолет крепя ракеты при бомбежке аэродрома.
ДЕМПИНГ-ФАКТОР ПРИВОДА – отношение момента привода к моменту инерции частей привода и связанных с ними масс. Паразитные инерционные колебания ведущего и ведомого приводов силовой обратной связи резонансно усиливают друг друга: биения резонансных частот приводов.
Увеличение демпинг-фактора: установка пружин (в обоих направлениях движения привода) в приводы обеих сторон, управление индуктивным сопротивлением обмоток транзисторного привода в разы уменьшает инерцию приводов и паразитные колебания обратной связи, повышает (легче убрать фильтром) частоты паразитных клебаний и КПД приводов. Управление индуктивным сопротивлением: коммутация секций обмотки.
3D-КАРДАН ЭКЗОСКЕЛЕТА:
ОСЬ-1 КАРДАНА: к ней крепится экзоскелет. На старте ось наклонена 45° к вертикали и плоскости спины. Ближний конец оси внизу, дальний вверху. Ось-1 кардана снаружи охватывает полукольцом ось-2 кардана.
Внешняя ось-1 (труба) кардана – часть коробки приводов, вращается вместе с туловищем человека. Внутренняя ось-1 кардана неподвижно симметрично закреплена в центре полукольца оси-2 кардана в его плоскости.
Радиальные роликоподшипники оси-1 кардана держат радиальную нагрузку. Осевую нагрузку держат 2 цилиндрических роликоподшипника с общей осью вращения углом 90° пересекающей ось-1 кардана. Оба роликоподшипника противоположно вращаются между 2 разного диаметра дисками в их торцевых дорожках. Диски в заднем конце внешней оси-1 кардана.
Прогрессивная подвеска жмет диск меньшего диаметра к роликоподшипнику, убирая зазоры: бесшумность. Консольная ось сдвоенного упорного роликоподшипника в сборочной оси параллельной оси-1 кардана.
Сборочная ось слева в полукольце оси-2 кардана. Разборка: отключить пружинный фиксатор, повернуть в сборочной оси на 140° ось сдвоенного цилиндрического упорного роликоподшипника, вынуть внешнюю ось-1 кардана.
ОСЬ-2 КАРДАНА на старте полукольцо сзади человека наклонено 45° к вертикали и полу комнаты. Ближний конец оси внизу, дальний вверху. Ось-2 кардана концами рогов полукольца соединена с концами рогов полукольца оси-3 кардана.
ОСЬ-3 КАРДАНА самая дальняя от человека, ось наклонена 45° к вертикали. Ближний конец оси вверху, дальний внизу. Если костюм телеприсутствия в углу комнаты, ось-3 кардана под углом 45° к стенам и полу (по большой диагонали комнаты). На старте плоскость полукольца под углом 45° к спине и полу комнаты. Вращается в неподвижной оси-К3 закрепленной в углу L-образной напольной рамы.
Все оси кардана пересекают человека в центре масс. Полукольца осей кардана как половинки квадрата с скругленными углами.
Приводы рук, ног двигают 2 электромотор-маховика (за спиной человека) противоположно вращающиеся справа, слева оси-1 кардана.
ПОТЕРЯ СТЕПЕНИ СВОБОДЫ КАРДАНА: совпали оси-1-3 кардана – теряем одну степень свободы. Чтобы не терять АКТИВНАЯ 3D-ПОДВЕСКА экзоскелета шарнирным механизмом по цифрам датчиков углов симулирует виртуальную ось-4 кардана. В оси-4 зажимная рама туловища относительно оси-1 поворачивается в обе стороны до 45°.
На старте виртуальная ось-4 кардана расположена перпендикулярно оси-1 в вертикальной плоскости, проходящей через позвоночник человека. Виртуальная ось-4 проходит в точке пересечения осей кардана.
Таблица синхронизации углов вращает ось-4 синхронно с осями кардана. Сближаются оси-1-3 кардана, надо вращать человека в горизонтальной оси – виртуальная ось-4 вращает человека на угол-Х синхронно осям-1-2-3 кардана.
3 пары электромотор-маховиков (большого диаметра; оси взаимно перпендикулярны) противоположного вращения, моментом от разгона и торможения маховиков вращают человека в 3D-кардане. Энергия в 3D-кардан вращающимся трансформаторами.
За спиной человека в оси-1 кардана в коробке приводов 3 пары электромотор-маховиков в одном (меньше требований к жесткости 3D-кардана) корпусе.
Угловая ориентация человека в 3D-кардане обратной связью электромотор-маховиков с датчиками (опрос с вращающегося трансформатора) угла 3D-кардана.
ВРАЩЕНИЕ ЧЕЛОВЕКА ПО ЧАСОВОЙ СТРЕЛКЕ: в оси-1 кардана костюма телеприсутствия софт переключает электромотор-маховик-1 группового привода правых рук, ног в режим тормозного момента (в неподвижную ось электромотор-маховика: статор внутри, ротор снаружи), вращающего человека по часовой стрелке оси-1 кардана.
Регенерированная торможением электромотор-маховика-1 (режим транзисторной муфты сцепления) энергия разгоняет электромотор-маховик-2 противоположного вращения, управляющий приводами левых рук, ног.
Момент разгона электромотор-маховика-2 тоже крутит человека по часовой стрелке в оси-1 кардана. Электромотор-маховики переключаются с режима транзисторной муфты сцепления в режим электромотора и наоборот.
ВРАЩЕНИЕ ЧЕЛОВЕКА ПРОТИВ ЧАСОВОЙ СТРЕЛКИ: софт переключает электромотор-маховик-2 приводов левых рук, ног в режим тормозного момента (в неподвижную ось), вращающего человека против часовой стрелки в оси-1 кардана.
Регенерированная торможением электромотор-маховика-2 (режим транзисторной муфты сцепления) энергия разгоняет электромотор-маховик-1 (противоположное вращение) приводов правых рук, ног. Момент от разгона электромотор-маховика-1 тоже крутит человека против часовой стрелки в оси-1 кардана.
Обмен энергией между электромотор-маховиками (при стопроцентных КПД режима транзисторной муфты сцепления, подшипников) теоретически позволяет с большими перегрузками вращать человека в любые стороны без затрат энергии. Этот эффект в осях 3D-кардана десятки раз уменьшает затраты энергии костюмом телеприсутствия на вращение человека в любых направлениях. Теоретически затраты энергии можно довести до нуля. Для уменьшения затрат управлять индуктивным сопротивлением фазных обмоток. КПД электромотор-маховиков – отношение индуктивных сопротивлений ротора и статора в режиме «разгон – торможение с регенерацией энергии».
В коробке приводов оси-1 кардана электромотор-маховики противоположного вращения за счет моментов торможения, разгона вращают 3D-кардан без моментов в пол дома.
БАЛАНСИРОВКА ОСИ-2КАРДАНА: для уменьшения энергозатрат вращения ось-2 кардана балансируют противовесы двухрычажных манипуляторов в концах рогов полукольца оси-2 кардана. Противовес – привод в конце манипулятора. Манипулятор помогает (алгоритм) электромотор-маховикам вращать ось-2 кардана. Сигнал дисбаланса с датчиков радиальной силы оси-2 кардана. Нулевой дисбаланс кардана.
БАЛАНСИРОВКУ ОСИ-1 КАРДАНА выполняет АКТИВНАЯ 3D-ПОДВЕСКА зажимной рамы туловища человека. Центр масс человека двигается влево – активная 3D-подвеска приводом двигает туловище человека вправо.
Нет электроэнергии: костюм телеприсутствия работает до 0,5ч с инерции электромотор-маховиков.
АКТИВНАЯ 3D-ПОДВЕСКА зажимной рамы туловища человека амплитудой до 15см в 3-х осях симулирует угловые и линейные ускорения, вибрации андроида. В виртуальной реальности: спуск космонавта с орбиты, гонщик авторалли; удары мечом, копьем…
Андроид получил импульс в направлении-1 – 3D-подвеска передает человеку серии коротких резких ударных колебательных импульсов в направлении-1. В каждом импульсе в фазе обратного хода 3D-подвеска медленно с постоянным тормозным ускорением двигает человека в обратном направлении, чтоб затем резким ускорением передать очередной ударный импульс человеку.
Ходьба, бег: при приземлении правой ноги привод правой ноги подбрасывает вверх-назад правую ступню, затем плавно идет обратно.
Корпус зажимной рамы туловища соединен с коробкой приводов через 3 одинаковых 2-звенных рычага подвески. Два 2-звенных рычага объединены с плечевыми шарнирами. Один 2-звенный рычаг объединен с тазовым 3D-шарниром. 2-звенный рычаг подвески зажимной рамы туловища имеет: 3 оси-X + 1 неподвижную ось-Y коробки приводов + 1 неподвижную ось-Y зажимной рамы туловища.
Активная 3D-подвеска зажимной рамы туловища тросовыми (от коробки приводов) приводами-X-Y-Z двигает в осях XYZ (симуляция линейных ускорений: резкое движение в направлении силы + медленное возвратное движение) зажимную раму туловища на управляемое софтом расстояние до 15см в все стороны.
Отдачу привода-X зажимной рамы туловища компенсирует привод-X2 противовесом-X2. Отдачу привода-Y компенсирует привод-Y2 противовесом-Y2. Отдачу привода-Z компенсирует привод-Z2 противовесом-Z2.
Приводы противовесов-X2-Y2-Z2 обратной связью с тремя 3D-датчиками ускорений зажимной рамы туловища компенсируют ускорения, не давая пройти в пол жилища.
Режим «балансировка»: приводы противовесов-X2-Y2-Z2 убирают моменты дисбаланса осей кардана от движений человека. Сигнал дисбаланса с датчиков радиальной силы осей кардана.
Активная 3D-подвеска выполняет функции системы ЦМ+ЦВ, по таблицам решений соединяющей ЦЕНТР МАСС + ЦЕНТР ВРАЩЕНИЯ человека при изменении положения рук, ног. Акробатика: в группировке центр масс человека идет вперед от туловища – 3D-подвеска двигает человека назад, соединяя центр масс человека с центром кардана.
В зажимной раме ступни оператора СИГНАЛИЗАТОР СКОЛЬЖЕНИЯ СТУПНИ передает оператору скольжение ступни андроида. Вибратор-1 синхронными ударами магнитов в наковальни дает продольное скольжение носка ступни андроида, вибратор-2 – поперечное скольжение носка, вибратор-3 – поперечное скольжение пятки. Вибратор: магнит в направляющей трубе + 2 обмотки + 2 пружины справа слева от магнита + наковальни в концах трубы.
Ступня андроида скользит вправо: магнит (двигает правая обмотка) бьёт правую наковальню. Сила ударов пропорциональна скорости скольжения ступни. Тока обмотки нет, пружина вернет магнит к центру трубы. Повтор цикла пока ступня скользит вправо.
Без опоры ступни андроида на пятку нет сигнала с пятки. Скольжение больше углового разрешения кардана – кардан вращает оператора в сторону скольжения. В носке ступни андроида инерционные датчики продольного, поперечного перемещения ступни, в пятке датчик поперечного перемещения пятки.
СИМУЛЯЦИЯ ЛИНЕЙНЫХ УСКОРЕНИЙ КОСТЮМОМ ТЕЛЕПРИСУТСТВИЯ: разгон вперед в беге наклоняет андроида назад. По сигналу 3D-гироскопа туловища андроида экзоскелет наклоняет оператора назад на тот угол. При торможении андроида экзоскелет наклоняет оператора вперед. Человек инстинктивными движениями сохраняет устойчивость положения андроида, обнуляя угловую скорость туловища. Наклоном вперед или назад на угол 90° костюм телеприсутствия симулирует максимальное ускорение 1g. Центрифуговый костюм телеприсутствия симулирует длительные перегрузки любого направления, силу тяжести крупной планеты; физические, температурные, информационные перегрузки боя летчиков-истребителей; спуск корабля с орбиты.
Центробежную силу андроида в повороте симулируют наклон человека вбок, разница нижних углов колен ног.
При росте бокового наклона поверхности ходьбы датчик вертикали андроида даст угол, угловое ускорение зажимной раме туловища. Чтоб не упасть вбок человек инстинктивными движениями сохраняет устойчивость положения андроида, обнуляя угловую скорость туловища.
При приземлении ступни в ходьбе, беге, прыжке привод ноги резко подбрасывая ступнёй вверх человека, симулирует нагрузку его ступне, как в ступне андроида. Обратный ход подвески медленный.
В тормозящем автобусе датчик вертикали туловища стоячего андроида передает угол, угловую скорость зажимной раме туловища. Чтоб не завалиться вперед человек наклоняет туловище назад до обнуления угловой скорости туловища андроида по его датчику вертикали. Аналогично при разгоне автобуса.
Диапазоны угловых скоростей, ускорений ограничены настройками: софт увеличит диапазоны при росте скорости бега андроида. Рост быстродействия обратной связи невозможен без снижения точности. Баланс «точность – быстродействие» по ускорениям человека, коэффициенту повторяемости.
ГРУППОВОЙ ПРИВОД КОСТЮМА ТЕЛЕПРИСУТСТВИЯ управляет 38 тросами: 2 длинных маховика вращаются в горизонтальных осях (перпендикулярны оси-1 кардана) параллельных плоскости спины человека.
Ось маховика привода левых руки, ноги – за левым плечом человека, ось маховика привода правых руки, ноги – за правым плечом.
Внутри правого маховика неподвижная труба-Н с упорной резьбой с 12 разрезными медными гайками скольжения.
АВТОМАТ ОБНУЛЕНИЯ РАДИАЛЬНОГО ЗАЗОРА: у гаек разрез с системой пружинящего изгиба гайки по разрезу чтоб убрать радиальный зазор, иначе резьбу сорвет осевая сила.
На внешней стороне гайки постоянные магниты. Гайки двигаясь вдоль своей оси по резьбе двигают тросы правой руки.
Вращающийся правый маховик разделен по длине на 19 секций с трехфазными обмотками. В трехфазной обмотке каждой секции правого маховика при вращении индукционный ток от постоянных магнитов парной гайки, если обмотки замкнуты транзисторами. Каждая пара «гайка – трехфазная обмотка» – транзисторная муфта сцепления.
Индукционный ток вращает гайку в резьбе, толкая невращающееся но скользящее по торцевой поверхности гайки кольцо вдоль оси гайки. Кольцо – упорный подшипник передающий силу осевого перемещения гайки на трос шкива 2D-шарнира экзоскелета плеча человека.
У кольца 2 противолежащих радиальных выступа внутри кольца. Эти выступы через продольные короткие (по длине осевого хода гайки) прорези неподвижной трубы-Н двумя тросами (прикреплены к выступам кольца внутри неподвижной трубы-Н) поворачивают шкив плечевого 2D-шарнира экзоскелета правой руки человека.
Задний ход гайки – кольцо идет назад. У привода короткий ход тросов, в новой версии (буду патентовать в Южной Корее) длинный ход.
Для управления частотой вращения гайки сигналом управления закорачиваем транзисторы обмоток.
Сигнал управления транзисторной муфтой сцепления плавно управляет 0-100% пробуксовкой сцепления гайки с трехфазной обмоткой маховика.
У каждой 19 трехфазных обмоток правого маховика свой колебательный контур, своя несущая частота сигнала управления с коаксиального (защита от наводок) сигнального кабеля, двигающая 19 тросами экзоскелетов правых рук (4 пальца), ног человека.
Вращающийся трансформатор передает сигнал управления транзисторам внутри маховика.
При уменьшении нагрузки на трос трехфазная обмотка правого маховика создает (питание с кабеля постоянного тока маховика) вращающееся поле противоположного направления вращения, возвращающее гайку назад.
Рычажная система экзоскелетов рук сбоку рук человека: можно опереться локтями об колени.
Часть регенерированной в обмотках транзисторных муфт сцепления электроэнергии после выпрямления идет на (кабель постоянного тока маховика) обмотки транзисторных муфт в режиме реверс-поля возврата троса в нулевое положение, часть энергии с вращающегося трансформатора идет в костюм телеприсутствия.
ПРИВОД РУКИ: тросы привода идут в шкивы-1 горизонтальной продольной (от человека) оси плечевого шарнира экзоскелета правой руки, затем вперед в шкивы-2 горизонтальной поперечной оси плечевого шарнира экзоскелета правой руки руки. С шкивов-2 тросы идут назад-вниз (руки вертикально вниз) в шкивы-3 с параллельной осью сзади середины зажимной рамы предплечья правой руки.
С шкивов-3 тросы идут вперед-вниз (горизонтально от стоящего человека) в шкивы-4 с осью-4 в верхней части зажимной рамы локтя правой руки. Рычаг-34 соединяющий оси-3-4 по длине равен рычагу-23, соединяющего оси-2-3. К рычагу-23 в отдельной оси у плеча крепится верхняя часть зажимной рамы предплечья.
Нижняя часть зажимной рамы предплечья соединяется с рычагом-23 рычагом-R переменной длины. Рычаг-R – винт внутри длинной гайки. Пневмотурбина длинной гайкой подгоняет положение зажимной рамы предплечья к положению зажимной рамы локтя перед стартом костюма телеприсутствия. При работе костюма телеприсутствия пневмотурбина обычно не работает.
Переменной длины рычаг-R соединяющий зажимную раму предплечья с рычагом-23 для подгонки длины зажимных рам предплечья, локтя, ладони.
ЭЛЕМЕНТЫ ПОДГОНКИ ДЛИНЫ ЗАЖИМНЫХ РАМ ПРЕДПЛЕЧЬЯ, ЛОКТЯ, ЛАДОНИ:
1. подпружиненный параллелограммный механизм соединяющий раму надувных зажимов предплечья с зажимной рамой предплечья
2. подпружиненный параллелограммный механизм соединяющий раму надувных зажимов локтя с зажимной рамой локтя
На рычаг-R нет момента приводов. Все рычаги двигает сила (сила мала) мышц человека, компенсируя несовпадение осей шарниров экзоскелета руки с осями суставов руки, компенсируя изменения расстояний между зажимными рамами предплечья, локтя, ладони. Аналогично компенсируются несовпадения осей, изменения расстояний между зажимными рамами бедра, голени, стопы. Привод дает в зажимные рамы костюма телеприсутствия только момент, угол.
Изобретенный мной другой полнофункциональный механизм подгонки длины зажимных рам и автоматической регулировки совмещения осей шарниров экзоскелетов с осями суставов человека, настолько упростил костюм телеприсутствия, что буду патентовать в Корее.
С шкивов-4 тросы идут вниз в шкивы-5 (ось параллельна оси шкивов-4), расположенные у нижнего локтевого шарнира зажимной рамы правой руки. С шкивов-5 тросы идут в шкивы-6, с осью параллельной продольной оси локтя.
Ось шкивов-6 закреплена в нижней части зажимной рамы локтя. Тросы с шкивов-6 идут в шкивы-7 (параллельная ось) нижнего локтевого шарнира зажимной рамы локтя правой руки.
Ось-7 шкивов-7 расположена с стороны бедра (человек стоит) ближе к бедру, чем ось-6 шкивов-6. Оси-5-6-7 соединены зажимной рамой локтя правой руки в одну жесткую конструкцию. С шкивов-7 тросы идут в шкивы-8 с осью-8, расположенной перпендикулярно оси-7 параллельно плоскости верхней части ладони над этой плоскостью. Ось-8 шкивов-8 закреплена в зажимной раме экзоперчатки.
С шкивов-8 тросы идут в зажимные рамы фаланг-1 пальцев ладони. Зажимные рамы фаланг-1 соединены с зажимными рамами фаланг-2 аналогично рычажной системе соединяющей зажимные рамы предплечья и локтя, компенсирующей несовпадение осей и изменение расстояний между зажимными рамами. Рычажная система экзоскелетов ног сзади ног чтоб не мешала двигать рукам, выполнять вертикальный горизонтальный поперечный шпагаты.
14 тросов (7 тросов правого маховика + 7 тросов левого маховика) вращают шкивы центральной наклонной (наклон вперед-вверх на 45°) оси тазобедренного балансира, в концах которого экзоскелеты ног.
Осевые нагрузки тазобедренного балансира держат пересекающие его углом 90° 2 цилиндрических роликоподшипника в общей оси. Они противоположно вращаются между 2 разного диаметра дисками (у нижнего подшипника тазобедренного балансира) в их торцевых дорожках. Прогрессивная пружинная подвеска жмет диск меньшего диаметра к роликоподшипнику, убирая зазоры для бесшумности.
ЗАЖИМНАЯ РАМА БЕДРА соединена с зажимной рамой таза изобретенным мной механизмом с шкивами тросов, позволяющих выполнять вертикальный горизонтальный (с наклоном назад) поперечный шпагаты. С шкивов-Н1 шарнира (поперечная горизонтальная ось) зажимной рамы правого бедра тросы идут назад-вниз в шкивы-Н2 (параллельная ось) в оси-Н2 закрепленной в рычаге-Н12.
С шкивов-Н2 шарнира (поперечная горизонтальная ось) зажимной рамы правого бедра тросы идут вперед-вниз в шкивы-Н3 (параллельная ось) в оси-Н3 (у колена) закрепленной в рычаге-Н23. Рычаг-Н23 соединяющий оси-2-3 по длине равен рычагу-Н12, соединяющего оси-1-2. К рычагу-Н12 в отдельной оси у верхней части бедра крепится верхняя часть зажимной рамы бедра.
Нижняя часть зажимной рамы бедра соединена с рычагом-Н12 рычагом-НR (винт внутри длинной гайки) переменной длины. Длинную гайку в подшипниках вращает пневмотурбина, подгоняя положение зажимной рамы бедра к положению зажимной рамы голени до старта.
Переменной длины рычаг-НR соединяющий зажимную раму бедра с рычагом-Н12 для подгонки длины зажимных рам бедра, голени, ступни.
ЭЛЕМЕНТЫ ПОДГОНКИ ДЛИНЫ ЗАЖИМНЫХ РАМ БЕДРА, ГОЛЕНИ, СТУПНИ:
1. подпружиненный параллелограммный механизм соединяет раму надувных зажимов бедра с зажимной рамой бедра
2. подпружиненный параллелограммный механизм соединяет раму надувных зажимов голени с зажимной рамой голени
На рычаг-НR нет момента приводов. Все рычаги двигает сила (сила мала) мышц человека, компенсируя несовпадения осей шарниров экзоскелета ноги с осями суставов ноги, компенсируя изменения расстояний между зажимными рамами бедра, голени, ступни.
Рычаг-Н23 ось-3 (у колена) соединяет с рычагом-Н34. Рычаг-Н34 ось-4 соединяет с зажимной рамой ступни. К рычагу-Н34 в отдельной оси у верхней части голени крепится верхняя часть зажимной рамы голени.
Спиной к зажимной раме туловища человек садится в седло зажимной рамы таза, в горизонтально расположенные зажимные рамы бедер. Ставит локти в подлокотники (зажимные рамы локтей), жмет зеленую кнопку. Надувные зажимы зажимных рам пальцев, рук, ног человека надует воздух.
Механизмы совмещения осей суставов человека и шарниров зажимных рам приводом (пневмотурбина + винт-гайка) настроят длину зажимных рам, подгонят к индивидуальным размерам человека. Затем надув воздухом надувных зажимов зажимных рам пальцев, рук, ног.
НАДУВНЫЕ ЗАЖИМЫ: камера-1 внутри внешней камеры-2. Камера-1 регулирует силу зажима зажимной камеры. Камера-2 регулирует расход воздуха системы вентиляции зажимов зажимных рам. В камере-2 много отверстий воздуха.
ЦЕПНОЙ ЗАЖИМ РАВНОМЕРНОГО ПРИЖИМА: рычаг-звенья-1-2-3-4-5-6 цепного зажима зажмут руку, (ногу) до стандарта силы в тросе. Большой диаметр секторного шкива троса у рычаг-звена-1. У рычаг-звена-2 диаметр секторного шкива троса меньше в столько раз, в сколько суммарная длина рычаг-звеньев-1-2 больше длины рычаг-звена-1.
Аналогичное отношение общей длины к диаметрам секторных шкивов остальных рычаг-звеньев дает одинаковую силу прижима каждого рычаг-звена цепного зажима к руке (ноге) одним общим тросом (разжимает рычаг-звенья пружина через второй общий трос).
Привод двигает общий трос через пружинный рычажный механизм с прогрессивной характеристикой (типа задней подвески кроссового мотоцикла) силы прижима. Каждое рычаг-звено своим надувным сегментом обхватит руку (ногу) любого размера.
Обвившись вокруг руки (ноги) конец цепного зажима, своими зубьями зацепляется с зубьями центральной балки зажимной рамы. Круговой обхват руки (ноги) любой формы + давление в надувных сегментах дают минимальную задержку управления.
Руки человека в подлокотнике: зажимной раме локтя. Стандартом силы датчика зажимной рамы локтя привод установит длину зажимной рамы предплечья. Предплечье зажмут 2 зажима у суставов.
ЭКЗОСКЕЛЕТ СТУПНИ: стандартом силы датчиков зажимной рамы ступней привод жмет к ступне человека башмак зажимной рамы ступни, установив длину зажимной рамы голени. Голень зажмут 2 зажима у суставов. Башмак закрывает ступню сверху, по бокам.
Привод зажимной рамы ступни башмаком прижмет ступню к заднему упору пятки до стандарта силы датчика. Стандартом силы датчиков зажимной рамы голени привод установит длину зажимной рамы бедра. Бедро зажмут 2 зажима у суставов.
Все приводы зажимов костюма телеприсутствия: пневмотурбина + винт-гайка. Пневмотурбины берут воздух системы вентиляции зажимов: воздух давлением 1 бар идет в отверстия зажимов. Осушенный воздух в ряды отверстий зажимов рук, ног, туловища. Ряд-1 дает сжатый воздух в зажимы. Ряд-2 откачивает пары пота.
Установки давления, температуры, влажности воздуха зажимов рук, ног, туловища по сигналам датчиков температуры, влажности кожи: воздух охлаждает тепловой насос, греет система воздушного охлаждения приводов. Выбор алгоритмов силы зажима пальцев, рук, ног, туловища.
Рычаг-звенья-1-2-3-4 цепного зажима зажмут таз до стандарта силы в тросе. Левый цепной зажим зажимной рамы таза загибаясь вправо-вниз углом 30° зажмет таз сбоку-спереди верхней левой боковой кости таза. Аналогично справа.
Стандартом силы 2-х плечевых датчиков зажимной рамы туловища, привод установит ее длину. Цепные зажимы зажимной рамы туловища зажмут человека в подмышках по бокам, спереди, плечи сверху, спереди.
ЗАЖИМНАЯ РАМА ТУЛОВИЩА соединена с зажимной рамой таза центральным тазовым 3D-шарниром. Вертикальная ось тазового шарнира: параллельно у оси позвоночника человека. Центральный тазовый шарнир: у верхней линии верхних костей таза, возле талии у спины. 3 оси центрального тазового шарнира пересекаются.
Седло: часть корпуса зажимной рамы таза. Центральный тазовый шарнир наклоняется право, лево, вперед, назад, поворачивается в вертикальной оси зажимной рамы туловища.
Седло костюма телеприсутствия не снимает веса человека с ступней, кроме случаев типа: андроид едет на мотоцикле (автомобиле) – привод седла костюма телеприсутствия переносит большую часть веса человека на седло по отношению веса андроида приходящей на его ступни (датчики силы на ступне) к весу андроида. При прыжке андроида на мотоцикле в туловище андроида 3D-датчик ускорений при невесомости обнуляет силу седла.
ВИРТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ: стандартный жест рукой включает виртуальный компьютер на виртуальном столе (все видно в шлеме, тактильно неотличимо от реальности) неподвижном для туловища человека.
В туловище андроида 4 3D-датчика ускорений и угловых скоростей (гиростабилизация телекамер). В виртуальной системе управления костюмом телеприсутствия колесиками ЭКВАЛАЙЗЕРА СИЛЫ (4 колесика: 4 диапазона скорости роста силы) оператор установит усиление диапазонов сил, коэффициент дополнительного усиления от скорости роста силы. Настройки потери усиления (звуковые сигналы) диапазона веса опасного предмета (мины, снаряда…). Режим «сапер»: эквалайзер силы раздельным по вертикали, горизонтали отрицательным усилением повысит чувствительность рук. Переключение эквалайзера в режим ЭКВАЛАЙЗЕР ВИБРАЦИЙ: фильтрация частотных полос вибраций, ударных и угловых ускорений пальцев, рук, ног, туловища.
Удар по андроиду – костюм телеприсутствия включит режим плавного перехода к новому положению андроида с ограничениями ударных ускорений действующих на оператора.
Защита производителя от судебных исков: регистратор костюма телеприсутствия записывает: углы, угловые ускорения, силы, скорости роста сил, амплитуды вибраций. Законы: для костюмов телеприсутствия сертифицированные сайты с регистраторами.
ЭКЗОПЕРЧАТКИ ТАКТИЛЬНО-СИЛОВОЙ зажимную раму привод согнет углом к локтю. Стандартом силы датчика зажимной рамы экзоперчатки привод установит длину зажимной рамы локтя. Локоть зажмут 2 зажима у суставов.
Привод сгибает углом к плоскости ладони зажимные рамы пальцев. По датчикам зажимных рам фаланг-1 пальцев привод установит длину зажимной рамы экзоперчатки: зажим плоскости ладони.
Привод сгибает фалангу-2 пальца углом к фаланге-1. Стандартом силы датчика зажимной рамы фаланги-2 привод установит длину зажимной рамы фаланги-1: зажим фаланги-1.
Привод согнет фалангу-3 пальца углом к фаланге-2. Стандартом силы датчика зажимной рамы фаланги-3 привод установит длину зажимной рамы фаланги-2: зажим фаланги-2.
На фалангу-3 наедет ТАКТИЛЬНЫЙ НАПЕРСТОК по форме кончика пальца с датчиком силы. Стандартом силы датчик установит длину рамы фаланги-3. Палец сгибает тяга, разгибает трос: предел силы привода установит оператор. Силу натяга экзоперчатки на кончики пальцев оператора раздельно (механизмы удлинения) на каждый палец регулирует автомат стабилизации силы натяга.
ТАКТИЛЬНЫЙ НАПЕРСТОК фаланги-3 имеет для подушечки пальца матрицу тактильных пикселей-электродов, передающую человеку тактильные ощущения пальцев андроида. Тактильные пиксели андроида передают теплопоток (сапер определит материал по теплопотоку), силу (давление).
Температура пикселя: за счет эффекта Пелтье. Знак теплопотока по скорости изменения температуры тактильного пикселя в руке андроида и температуре окружающей среды.
Уровень усиления тактильных пикселей силы, температуры, теплопотока устанавливает оператор колесиками разного диаметра и рельефа их поверхности в виртуальной системе управления.
Оператору костюма телеприсутствия рельеф поверхности, ощупываемой пальцами андроида, матрица тактильных пикселей-электродов тактильного наперстка передаст
ОБРАТНАЯ ЭЛЕКТРОВИБРАЦИЯ:
1. резко растущее медленно падающее пульсирующее напряжение электрода кожа ощущает как выпуклость
2. медленно растущее быстро падающее пульсирующее напряжение кожа ощущает как вогнутость
Матрица тактильных пикселей-электродов повышенными токами, изменением частоты подачи напряжения на кожу симулирует судорожным сжатием мышц силу внешней среды. Установки силы тока, напряжения.
Палец выбирает зазоры за счет клиновой формы тактильного наперстка. В районе кончика ногтя наперсток не касается пальца. К подушечке пальца прилегает полукруглая поверхность тактильного наперстка.
В каждом тактильном пикселе верхний металлический электрод (касается подушки пальца) – общий электрод температурного и силового пикселя: электроцепи с гальванической развязкой.
Верхняя (сторона ногтя) часть тактильного наперстка параллелограммным механизмом закреплена на нижней части тактильного наперстка. Перед началом работы человек вводит пальцы в тактильные наперстки.
При прикосновении к нижней части тактильного наперстка привод прижимает верхнюю часть тактильного наперстка к пальцу, выбирая зазоры. Датчик силы останавливает привод, фиксирует положение.
РЕГУЛИРОВКУ СИЛ ЗАЖИМОВ ПАЛЬЦА ЭКЗОПЕРЧАТКИ выполняют тросы в обратной связи с датчиком-Z (измеряет силу действующую на кончик пальца вдоль продольной оси фаланги пальца) по принципу:
1. сила в датчике-Z постоянная: привод датчика-Z включает переход за верхний или нижний порог силы датчика-Z, обратный переход выключает.
2. силу прижима боковых зажимов пальца привод держит постоянной по сигналу датчика-Z через общие трос, шкивы.
3. при соприкосновении пальцев их приводы выключит датчик-Z: он фиксирует боковую силу через общие трос, шкивы. Не выключил датчик-Z привод – выключит сигнал нулевой разности углов между пальцами.
ЗАЖИМНАЯ РАМА ЛАДОНИ 3D-шарниром соединена с зажимной рамой локтя. Привод ладони андроида при захвате или упоре об поверхность уравнивает значения сил датчиков всех фаланг пальцев, пока оператор усилием длящимся более 0,2сек не усилит отдельный палец.
3D-вибратор зажимной рамы ладони отдельным каналом-D дает оператору амплитуду, частоту, вектор вибрации действующей на ладонь (3D-датчик ускорения) андроида. Канал-D дает оператору больше битности, диапазона амплитуд и частот чем тактильные каналы пальцев. Оператор приложив ладонь андроида определит работает или нет двигатель транспортного средства, станка; едет ли по дороге машина.
Саперам: экзоперчатки с матрицами повышенного тактильного, температурного разрешения: сапер на ощупь датчиками теплопотока различит металлы, другие материалы.
Привод на голову опустит ШЛЕМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ фиксируя в зажимной раме. За полупрозрачным сферическим 3D-экраном с вырезами для плеч, невидимо человеку-1 32 телекамеры обратной связи дают человеку-2 в удаленном костюме-2 телеприсутствия 3D-картинку лица человека-1.
Каждая телекамера показывает квадратный фрагмент лица.
У телекамер лампы подсветки отраженным рассеянным светом. Ракурсы, тип подсветки лица в шлеме, изменение цвета, яркости каждой светодиодной лампы – сценарии софта. 3D-экран, телекамеры обратной связи, лампы работают импульсно раздельно в времени.
Радиус 3D-экрана 30см: экзоскелеты рук не портят картинку. Дальше от глаз экран шлема – меньше морской болезни от разницы «расстояние до реального объекта – до экрана».
Сферический 3D-экран по бокам сплющен на 10см чтоб выполняя работу сверху руки не задели экран.
У андроида вместо поворота головы гиростабилизированное переключение (по горизонтали, вертикали) ракурсных телекамер, строчек, пикселей их матриц: постоянное положение пикселей фона для сжатия видео. На каждый фокусный диапазон пара стереокамер.
3D-ЗВУК: для каждого уха в шлеме полусферой 128 рупоров дающих звук через отверстия диаметром 2мм сферического экрана шлема. Отверстие – трубка длиной 2мм подсвеченная изнутри светодиод-пикселями 3D-экрана.
Громкость звука выше порога – к звуку каждого отверстия софт подключит звук других отверстий. Басы дает вентилирующий воздух зажимов рук (ног) электроклапанами.
В костюме телеприсутствия 3D-звук чтоб управляемый оператором за тысячи километров андроид на улице не попал под машину едущей сбоку или сзади, слышал векторы прихода звуков чтоб не свалиться вниз.
3D-звук: 4 динамика вертикальной плоскости спереди + 4 динамика вертикальной плоскости сзади дают любой мгновенный суммарный вектор прихода звука. В 3D-наушниках 8 динамиков: 4 в каждом ухе дают 4 вектора звука направленных встречно по диагоналям (45° от вертикали) плоскости уха.
В передаче (записи) 3D-звука нужен один 3D-микрофон или 3 совмещенных стереомикрофона. При совмещенных стереомикрофонах убирают сдвиг фазы средних, высоких частот: выходной сигнал 3D-звука в всех каналах одинаков, отличаются только мгновенные уровни звука, давая системе 3D-звука трафик ~6 раз меньше звука 7.1 и ~4 раза меньше звука 5.1
1 суммарный канал звука + 3 разностных канала звука дают мгновенный суммарный вектор звука.
Расположение источника (вектор прихода звука) звука – по полярности сигнала: источник (вектор прихода звука) звука с стороны (3D-угла) максимальной цифры полуволны сжатия воздуха. Полярность – полусфера прихода звука. Угол вектора прихода звука – по отношениям амплитуд полуволн сжатия (воздуха) мембран (с стороны полусферы прихода звука) микрофона.
3D-микрофон: 3 максимально сближенные взаимно перпендикулярные мембраны + отдельный моно-микрофон низких частот.
Горизонтальный угол прихода звука: по разностному сигналу вертикальных мембран после накопления (в каждом диапазоне частот отдельный таймер) сигнала.
Вертикальный угол прихода звука: разность сигнала горизонтальной мембраны 3D-микрофона и суммарного сигнала вертикальных мембран. Разностные сигналы урезаны снизу, сверху по условиям точности вектора звука.
Андроид имеет 3D-микрофон слева головы + 3D-микрофон справа головы. Или 2 совмещенных стереомикрофона слева + 2 совмещенных стереомикрофона справа. Дальность источника звука по разности амплитуд (время прихода звука до микрофонов) и проценту (сравнение 2-х сигналов) энергии верхних частот в сигнале.
В виртуальной системе управления костюмом телеприсутствия для передней полусферы звука 1 колесико громкости и 2 колесика баланса (баланс звука по горизонтали + баланс звука по вертикали + баланс звука «передняя полусфера звука – задняя полусфера звука»), для задней полусферы звука 2 колесика баланса (баланс звука по горизонтали + баланс звука по вертикали). Направление движения колесиков совпадает с направлением регулировки баланса звука и роста уровня звука – можно быстро выделить колесиками вектор прихода звука для реакции военного андроида на опасную среду.
Разницу частотных характеристик, чувствительности 3D-микрофонов андроида компенсирует софт. Отказ 3D-микрофона: другой 3D-микрофон вычислит расстояние сравнив баланс частот звука известного источника звука с эталонами. Дальность: по форме кривой звука: больше мощность источника звука – ближе форма кривой синусоиды (отдельные частоты) звука микрофона к Z-графику ударной волны.
Уровень близости к Z-графику определит накопление выпрямленных четвертей-1-4 синусоиды верхней частоты звука в конденсаторе-1, накопление выпрямленных четвертей-2-3 синусоиды верхней частоты звука в конденсаторе-2. Границы четвертей синусоиды в высших точках полупериодов. Разность заряда конденсаторов-1-2 через время t пропорциональна расстоянию до источника звука.
ТЕЛЕУПРАВЛЕНИЕ РОБОТОМ – возможны морская болезнь, тошнота, головокружение, усталость оператора от:
1. большой скорости, амплитуды угловых колебаний ракурса картинки телекамер. Решение:
a)оптическая угловая стабилизация (по гироскопу) ракурса телекамер робота
b)софт заменяет равномерную угловую скорость мгновенными скачками угла линии взгляда телекамер. Неподвижный фон, отсутствие угловой скорости улучшают самочувствие оператора
2. несоответствие углового расстояния «глаз – объект в реале» расстоянию «глаз – экран шлема». Решение: экран в шлеме подальше от глаз оператора.
ИНТЕРНЕТ-ТРАФИК КОСТЮМА ТЕЛЕПРИСУТСТВИЯ:
1. общий трафик силовых, угловых каналов костюма телеприсутствия 56кбит/с (7Кб/с):
Каналы углов, угловых скоростей: 34кбит/с: период дискретизации 0,02с. В среднем 12 бит на угол и 5 бит на угловую скорость. Углы 40 тросов по сигналам датчиков перемещения троса: 243кбит/с на углы + 122кбит/с на угловые скорости. Удлинение тросов под нагрузкой компенсируем таблицами решений. Больше угловая скорость экзоскелетов рук, ног – больше частота передачи угла
Каналы силы, скорости роста силы: 22кбит/с: период дискретизации 0,02с. В среднем 6 бит на силу и 5 бит на скорость роста силы это в 40 тросах 12кбит/с на силы + 10кбит/с на скорости роста силы в 40 тросах
Канал гироскопа: 1,95кбит/с: 3 угла кардана, период дискретизации 0,02с. В среднем 7 бит на угол это 1,05кбит/с на три угла. 3 угловые скорости (6 бит) кардана, период дискретизации 0,02с это 0,9кбит/с
Канал ускорений туловища (9 каналов активной 3D-подвески): 2,3кбит/с: 9 цифр, период дискретизации 0,02сек, 5 бит
2. канал видео 1Мб/с: сжатая 3D-картинка, 3D-звук
3. канал тактильный:
Обе кисти: 300кбит/с (38Кб/с): 5000 тактильных пикселей в одной ладони, 3 бит, период дискретизации 0,05с
Обе ступни: 30кбит/с (3,8Кб/с): 500 тактильных пикселей, 3 бит, период дискретизации 0,05с
Остальное тело: 1-1,5Мб/с
В динамических (несжимаемых) сценах
АЛГОРИТМ «РАЗРЕШЕНИЕ ЭКРАНА – ЧАСТОТА КАДРОВ» при нехватке интернет-трафика подгонит видеобаланс «РАЗРЕШЕНИЕ ЭКРАНА – ЧАСТОТА КАДРОВ» к трафику: при превышении критической пиксельной скорости перемещения в картинке линий, алгоритм увеличит частоту кадров, уменьшив разрешение. При уменьшении пиксельной скорости движения линий в картинке, алгоритм увеличит разрешение картинки, уменьшит частоту кадров.
Видеобаланс, стереобаза, буферизация – по виртуальной системе управления.
Для костюмов телеприсутствия и виртуальной реальности сети 5G выделят сегменты малой задержки сигнала.
По окончании работы оператор жмет красную кнопку: костюм телеприсутствия фиксируется вертикально, разжим зажимов, 3D-экран уйдет вверх-назад.
ЗАЩИТА ОТ ПРЕРЫВАНИЯ СИГНАЛА: при прерывании обратной связи андроидом управляют:
АВТОПИЛОТ ПРОДОЛЬНЫЙ по центру масс и вектору инерции поддерживает продольную устойчивость андроида, сохраняет параметры (установки на ускорение, спуск, подъем) ходьбы андроида и останавливает его, ограничивает продольно-горизонтальное ускорение телекамер головы и ладоней андроида.
АВТОПИЛОТ ПОПЕРЕЧНЫЙ поддерживает боковую устойчивость андроида, ограничивает величину перемещения (установки реакции на ускорение, наклонную поверхность ходьбы) вбок андроида в ходьбе, поднятии тяжести; ограничивает поперечно-горизонтальное ускорение телекамер головы и ладоней андроида.
АВТОПИЛОТ ВЕРТИКАЛЬНЫЙ стабилизирует по вертикали телекамеры андроида, ограничивает вертикальное ускорение телекамер головы и ладоней андроида.
ЗАЩИТА ОТ ПРЕРЫВАНИЯ СИГНАЛА ОТ ПЕРЕКЛЮЧЕНИЯ МЕЖДУ СПУТНИКАМИ: паралельное подключение: ещё не кончил передачу сигнала спутник-А, подключается спутник-В дублируя сигнал.
ДАТЧИК СИЛЫ: измеряющие силу в тросе неподпружиненные ролики в роликоподшипниках расположены в дальних концах тросов: упругие деформации троса меньше влияют на тензодатчик в рычаге оси ролика. У каждого троса таблица задержек от упругих деформаций троса.
Дублирующего датчика силы сигнал – сила тока транзисторной муфты сцепления в приводе: таблица «угол – сила тока умножить на время».
ДАТЧИКА СИЛЫ ПРОГРЕССИВНАЯ ШКАЛА БИТНОСТИ: интуитивно линейная шкала требует ПРОГРЕССИВНУЮ ШКАЛУ БИТНОСТИ ДАТЧИКА СИЛЫ костюма телеприсутствия, андроида.
1 бит ступенька силы сигнала датчика силы костюма телеприсутствия. В начале шкалы 1 бит малая цифра: в легком прикосновении пальцев андроида к гайке ступеньки силы малы.
При росте силы зажима пальцами гайки каждая последующая ступенька силы крупнее: разность сил между ступеньками силы растет в одинаковой пропорции.
КАЛИБРОВКА БИТНОСТИ: битность датчиков андроида не равна битности датчиков костюма телеприсутствия – работает таблица соответствия «битность андроида – битность костюма телерисутствия»: подгонка цифр битности датчиков с учетом физиологии.
КАЛИБРОВКА СИСТЕМЫ КООРДИНАТ: костюм телеприсутствия автоматически калибруется в время его работы. Калибровка углов, ключевых подвижных точек по времени прохода ультрафиолетового импульса до фотоэлементов экзоскелетов рук, ног.
Ультрафиолетовые (нет помех) датчики расстояния калибруют таблицы «сила натяжения троса – перемещение троса – угол», таблицы координат экзоскелетов рук, ног. Ультрафиолетовые светодиоды излучатели у шарниров зажимных рам пальцев, рук, ног.
2 фотоэлемента зажимной рамы туловища справа, слева по бокам спереди пояса, ниже верхнего шарнира локтя. 2 фотоэлемента приемника зажимной рамы туловища справа, слева по бокам сзади пояса, ниже верхнего шарнира локтя.
2 фотоэлемента зажимной рамы туловища спереди в правом, левом плече. В зажимной раме правого бедра сверху сбоку справа 2 ультрафиолетовых светодиода спереди, сзади для правых фотоэлементов пояса зажимной рамы туловища.
В зажимной раме бедра спереди снизу ультрафиолетовый светодиод для передних поясных фотоэлементов зажимной рамы туловища. В зажимной раме правой голени сбоку снизу с внешней стороны сзади ультрафиолетовый светодиод для правых поясных фотоэлементов зажимной рамы туловища.
В носке зажимной рамы ступни ультрафиолетовый светодиод для фотоэлемента бокового центра зажимной рамы голени. Ультрафиолетовые светодиоды излучают импульс поочередно.
Координаты светодиода по времени пролёта импульса до 3 разнесенных фотоэлементов минус задержка излучения импульса светодиодом, минус задержка приема импульса фотоэлементом. Координаты пальцев от системы координат зажимной рамы кисти.
Тросы костюма телеприсутствия, андроида высокомодульные (не пружинят) с высокой скоростью звука для уменьшения задержки управления и экономичности костюма телеприсутствия. Повышенная сила натяжения тросов повышает реализм ощущений формы объектов, структуры поверхности.
Сборка домашнего костюма телеприсутствия с контейнера человеком за 15мин дома. Все регулировки, настройки за 4сек делает софт. Костюм телеприсутствия, человек ростом до 1,82м: высота 2,42м. длина 2,42м. ширина 2,42м. Детский, дети ростом до 1,6м: 1,9м x 1,9м x 1,9м.
АНДРОИД – СОЛДАТ ПОЗИЦИОННОЙ ВОЙНЫ: в поле боя равные по силе страны: позиционная война в которой чтоб пройти 100м в городе отдают жизни десятков тысяч солдат. Жизнь солдата $1млн, хватит на андроиды.
Управляют андроидами удаленные до 6000км операторы домашних костюмов телеприсутствия. Вмешательство хакера маловероятно: диалоговый пароль + шифровка канала + неизвестен алгоритм сжатия… На 2км в условиях гонки мощностей узконаправленными лучами непрерывно блокировать все частоты электромагнитных волн маловероятно учитывая псевдослучайный перескок частоты передатчика, приемника.
МОДУЛИРУЮЩИЕ УГОЛКОВЫЕ ОТРАЖАТЕЛИ (моё изобретение) без приводов, систем стабилизации дают сигналы датчиков андроида костюму телеприсутствия через модуляцию отраженной энергии лазерного луча ретранслятора. Каждое из трех зеркал модулирующего уголкового отражателя это отдельный модулятор, который многократно кратковременно уменьшает яркость отраженного лазерного луча для передачи цифрового сигнала.
Связь с андроидом на 2 длинах лазерного луча. Длина-1 луча для фотоэлемента. Длина-2 луча для ответного сигнала уголкового отражателя с модуляцией. Андроид не тратит энергии на обратную связь, только на модуляцию. У фотоэлемента, уголкового отражателя есть фильтры.
Вместо прямого луча можно отраженный от многих стен луч, длинную цепь андроидов-ретрансляторов. Военный андроид выходя с зоны связи с рюкзака ставит ретранслятор: оптоволокно сматываясь с катушки пояса андроида сохраняет связь с ретранслятором. С андроидом за стеной на расстоянии 10-20м радиосвязь сквозь стену, связь на рентгеновских лучах.
Электромагнитные генераторы помех противника обратная связь блокирует ростом мощности передатчика, уменьшением чувствительности приемника.
Городской бой военных андроидов: узконаправленная инфракрасная лазерная связь с беспилотников-ретрансляторов с ИИ выбирающим (тепловизор) поверхности отражающие луч. Инфракрасные помехи: связь терагерцовым, рентгеновским лучом.
По инерциальному навигатору, картинке тепловизора (углы прихода луча) софт найдет какие модулирующие уголковые отражатели андроида включить. Помехи противника – оператор костюма телеприсутствия переключит номера модулирующих уголковых отражателей.
Андроиды с искусственным интеллектом ИИ: нет обратной связи с оператором – андроид прекратит бег, ложится по таймеру… шаблонные реакции – установки пользователя. Шаблоны: распознавание, уничтожение солдат противника в заданном координатами, временем секторе при нет ответа на лазерный или радиоопознаватель «свой – чужой».
Для питания сверхмощного передатчика бесшумные газотурбогенераторы соединяемые на выходе параллельно – сквозь стену мегаваты узконаправленных электромагнитных волн к андроидам. От них андроиды-солдаты не откажут:
1. микропроцессоры высоковольтные
2. провода заменены заземленными коаксиальными кабелями или оптоволокном (оптоволокно сечением 1кв.мм передает мощность 100кВт)
3. микропроцессорный блок андроида за 4 экранами. Экраны-1-2 из меди. Между медными Экран-1 и Экран-2 поляризующее постоянное напряжение 100000В (для поляризации диэлектрика между экранами) – защита от высотной разности потенциалов от сдувания с молекул воздуха электронов гамма-лучами термоядерного взрыва на высоте 500км, сдувания электронов атомов рентгеновской обратной связью. Между экранами-1-2 диэлектрик с высокой диэлектрической проницаемостью сглаживает острые пики волн электромагнитных бомб.
Экран-3 – феррит – защита от вихревых токов.
Экран-4 – эрбий 167Er – защита микропроцессора от гамма и рентгеновских лучей.
Экран-5 – гадолиний 157Gd – защита микропроцессора от нейтронных бомб.
Живой солдат проигрывает андроиду (6 разнесенных микрофонов) в помехоустойчивости звукового канала информации.
Штурмовой фонарь ослепит живого солдата, не андроида: поляризационные (круговая поляризация правого, левого вращения + 2 оси линейной), спектральные фильтры телекамер. Алгоритм фильтров: максимум верхних частот видеосигнала + максимум суммарной длины тонких линий картинки.
Для защиты оптики от пулеметов у военного андроида сверхтвердые зеркала-перископы телекамер. Зеркала с вольфрам-молибденового сплава с отражающим покрытием с легкоплавкого сплава с высоким коэффициентом поверхностного натяжения. Появились царапины – пустим ток по зеркалу: легкоплавкое покрытие плавится, застынет без царапин.
Верхнего зеркала перископа телекамеры прогрессивная (жесткость плавно растет до бесконечности как в подвеске заднего колеса кроссового мотоцикла) подвеска (2 оси свободы) ослабит ударный импульс пуль, осколков.
Датчики электромагнитных, звуковых, сейсмических волн в войне – ключ к победе.
Быстродействие «сработал датчик – выстрел с оружия» военных роботов с ИИ не хуже 0,003сек (цикл работы торгового робота биржи), живого солдата от 0,3сек до 3сек: зависит от времени суток, усталости… При внезапной встрече соотношение потерь «андроиды – живые солдаты» 1:100.
Эксперты по видео найдут в бою ключевых андроидов с лучшей позицией и сохранностью, подключат лучших операторов. После боя андроиды соберут остатки андроидов для сборки новых андроидов: можно иметь в боях миллионы андроидов. Конструкция андроида оптимизирована на сборку андроидами.
Задачи андроид-заправщиков снабжающих андроидов энергоносителями, боеприпасами:
1. сигнал опознавания «андроид-заправщик», принять ответный сигнал
2. снять с андроид-солдата коробку-рюкзак с аккумулятором, закрепить свежую коробку-рюкзак с аккумулятором, боеприпасами
Аватарные военные сайты в условиях близких к реальным обучат военных (не выходя из дома) в сражениях любого масштаба, ограниченного только числом реальных участников. Ранения софт симулирует ограничивая приводы, датчики.
Операторы – геймеры многопользовательских онлайн-войн, чемпионатов. Статус, оплата наемника-оператора по результатам чемпионата, покадрово оцениваемых экспертами.
ГЛУБОКОВОДНОЕ ПРЕДПРИЯТИЕ: найдя в глубине 5,6км месторождение редкоземельных металлов 1000 раз больше мировых запасов, Япония приняла госпрограмму освоения ресурсов морского дна: редкоземельные металлы, гидрат метана, нефть, газ.
21 век: рабочие, инженеры республики Корея домашними костюмами телеприсутствия с сайта корейского глубоководного предприятия одновременно управляют тысячами андроидов (1-2Мбит/сек каждый) оптоволоконным электрокабелем с корабля по спутниковой связи. Бесконтактная электромагнитная зарядка аккумуляторов андроидов, розетки 1,5В.
Турсайты: реальные путешествия в любую точку планеты, хоть на дно Марианской впадины. Машина времени: участие в любом событии Истории, общение с её персонажами: играют актрисы, актеры, волонтеры с сайтов, компьютерные симуляторы личности.
ПРОТОКОЛ ВИРТУАЛЬНОГО МИРА соединит симуляторы личностей c сетью: платные пользователи общаются с симуляторами известных личностей, путешествуют с ними, занимаются с ними сексом.
Многопользовательские звездные войны Галактических империй: миллиарды пользователей-участников одновременно играют в одной онлайн-игре за/против других пользователей.
Домашними детскими куклами-андроидами всех размеров в интернете управляют волонтеры; платные актрисы, актеры. Поисковик найдет аватарного работника в радиусе 6000км, запись работы регистратором.
Дистанционная работа в любой точке планеты, в АЭС и опасных производствах, хирургические операции в районе катастрофы, военных действий.
ОХРАНА АВТОНОМНЫХ ТАНКЕРОВ, КОНТЕЙНЕРОВОЗОВ: при нападении пиратов через узконаправленные лучи с нескольких спутников связи ближайшее по курсу корабля агентство охраны через костюмы телеприсутствия оживят андроидов-солдат, отразят нападение пиратов.
Сигнал – аватарный оператор АНДРОИДНОЙ ОХРАНЫ ЖИЛИЩ домашним андроидом влепит грабителю, прикуёт наручниками к трубе отопления до приезда машины с полицейскими андроидами.
АНДРОИД-СВАРЩИК десятки раз удешевит сварку, резку, высокоточную раскройку электронным лучом в вакууме. Объект сварки в тележке на рельсах едет в шлюз-камеру. Откачка воздуха. Откроется гермодверь, тележка въедет в вакуумный цех. Выезд в обратном порядке. Вариант: аргоновый или углекислотный (на выхлопных газах) сварочный цех.
ТЕРМИЧЕСКИЙ АНДРОИД: выплавка металла, горячие техпроцессы сверхэкономичны в термоизолированном горячем цехе с средствами обмена температурами объектов в входном, выходном термошлюзах цеха. Андроидами (покрыты полированным сплавом золото+иридий: отражает энергию лучей) термоизолированного цеха с 1600-2000°С управляют рабочие.
МИКРОАНДРОИД-ХИРУРГ кроме рук, ног есть хвост – длинная антенны двухсторонней обратной связи: позолоченная нить.
ЭНЕРГОСНАБЖЕНИЕ МИКРОАНДРОИДА:
1. рентгеновскими лучами
2. терагерцовыми лучами
3. ультразвуком
ПЕРЕМЕЩЕНИЕ МИКРОАНДРОИДА В КРОВЕНОСНЫХ СОСУДАХ:
1. микроандроида перемещает сфокусированное в перемещаемой точке несимметричное (крутой передний фронт, пологий задний фронт полупериода колебания) по графику электромагнитное поле, снабжающее энергией
2. микроандроида перемещает сфокусированное в перемещаемой точке несимметричное (крутой передний фронт, пологий задний фронт полупериода колебания) по графику ультразвуковое поле, снабжающее энергией. Микроандроид-хирург удалит тромб, раковую опухоль, вирусом или радиоактивной инъекцией раковую опухоль, другие операции; отправит радиосообщение (длинную гибкую антенну крепит растворяющийся винт в стенке сосуда) о анализе опухоли, введет радиоактивную инъекцию; стволовыми клетками вылечит разорванные нервные волокна сломанного позвоночника…
ЗАЩИТА ОТ СРЕДСТВ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ: управление андроидом дублировано в рентгеновском, инфракрасном, терагерцовом, ультрафиолетовом диапазоне. Рентгеновская обратная связь андроидной охраны защитит военные объекты. Андроидами домашней охраны управляет ИИ умного дома.
Владелец костюма телеприсутствия по Закону использует зарегистрированную КРИПТОЗАЩИТУ ОБРАТНОЙ СВЯЗИ «КОСТЮМ ТЕЛЕПРИСУТСТВИЯ – АНДРОИД»: у команд обратной связи псевдослучайный номер, метки начала, окончания кода команды. В следующей команде другие номер, шифр + метки начала, конца команды. Допуски времени на части сигнала, переходы между ними.
В регистратор время, направление приема предыдущего сообщения андроидом. Динамический шифр привязан к дате, времени суток. Отключаются секторы диаграммы антенн робота откуда ложные команды.
Псевдослучайный перескок частоты по динамическому шифру. Ретрансляторы с нескольких азимутов направлений прихода сигнала динамическим шифром переменной задержки сигнала блокируют пеленгаторы.
ЗАЩИТА ОТ ХАКЕРОВ: компьютер безопасности костюма телеприсутствия сводит к нулю вероятность нанесения хакерами увечий пользователю костюма телеприсутствия: он не связан с любыми другими компьютерами, не подключен к линии обратной связи или интернету, информационные системы костюма телеприсутствия изолированы друг от друга.
Ответственность по УК: выход за пределы территории; незаконное управление; подделка идентификации; подделка госпароля; использование прокси-сервера; использование электромагнитных помех, сверхярких свеч (засвечивают картинку камер) против полицейских андроидов.
Андроиды законом снабжены известным госорганам госпаролем перехвата управления. Радиоканал полицейских андроидов дублирован от помех средствами узконаправленной лазерной связи.
Костюм телеприсутствия позволит врачам мгновенно оказаться в теле домашнего андроида в доме больного человека. Костюм телеприсутствия – домашний реабилитационный (паралич) аппарат.
Я ИЗОБРЕЛ НЕ ТРИГГЕРНЫЙ КОМПЬЮТЕР
Адресная система компьютера требует меньше памяти. Надежность работы софта выше существующих компьютеров. Создание софта требует 10 раз меньше времени.
В компьютере нет триггеров, мгновенно включается. Архитектура для любых задач. Сведенный к абсолютному минимуму набор команд исключает проблему совместимости софта железа разных поколений. Процессор не дает использовать компьютерную бомбу: отразится в структуре бесконечно повторяющихся групп элементов. Код софта не скроет функции: все действия кода однозначны, выполняются единственной комбинацией символов: меньше вероятность успеха хакера. Вероятность багов кода 1000 раз меньше. Процессор может работать (не нужны полупроводники) в температурном диапазоне 0-2300°К подбором материалов. Совместимость с существующим софтом через симуляторы операционных систем. Число параллельных каналов обработки информации процессора неограниченно, устанавливает софт.
Я чемпион мира по изобретательству, конструированию, искусственному интеллекту, отвечаю за эти слова перед работодателями-хангуками и властями Кореи.
Томас Эдисон
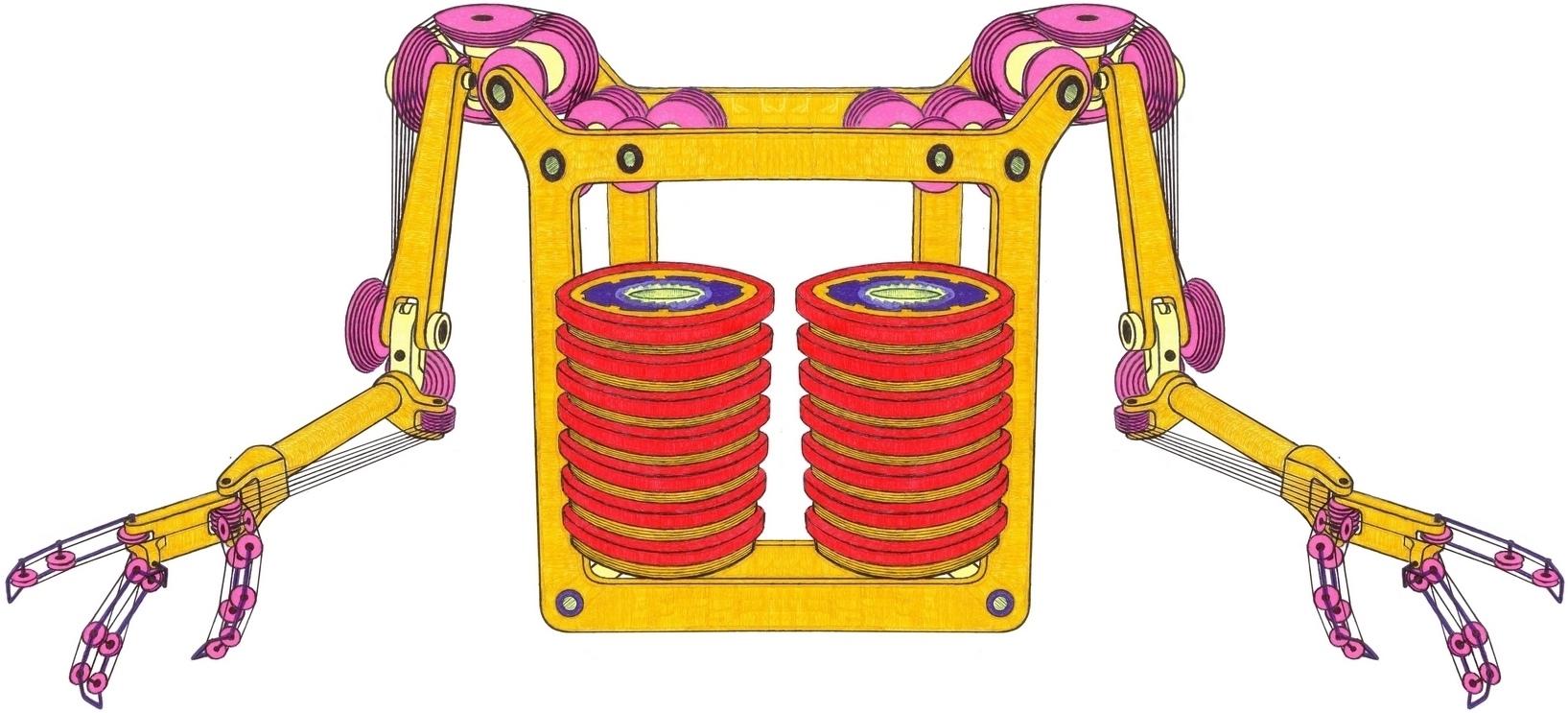
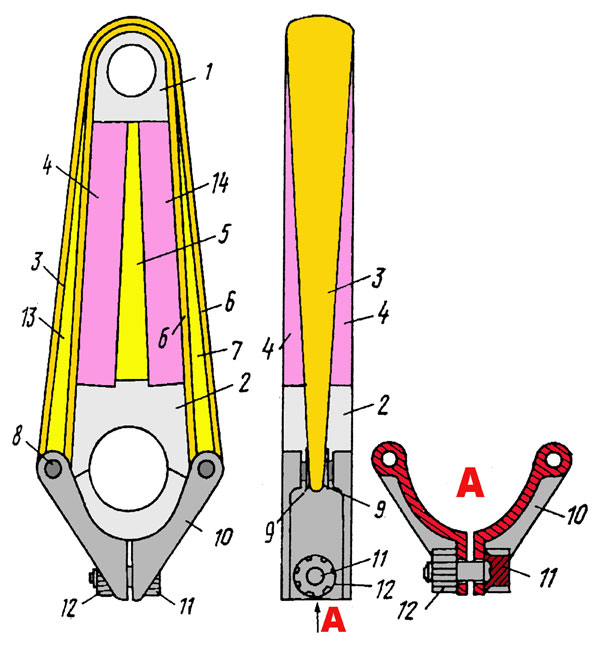
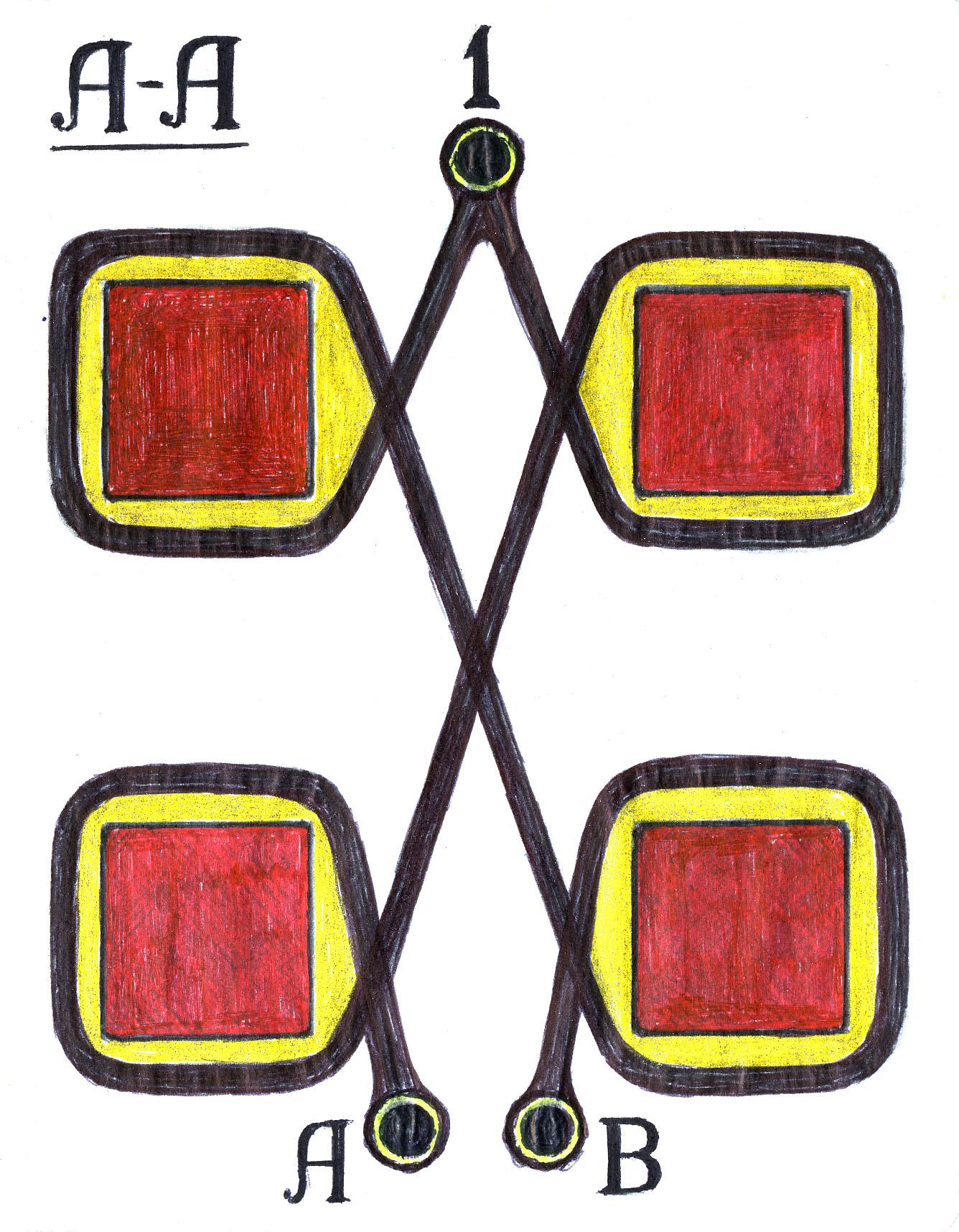
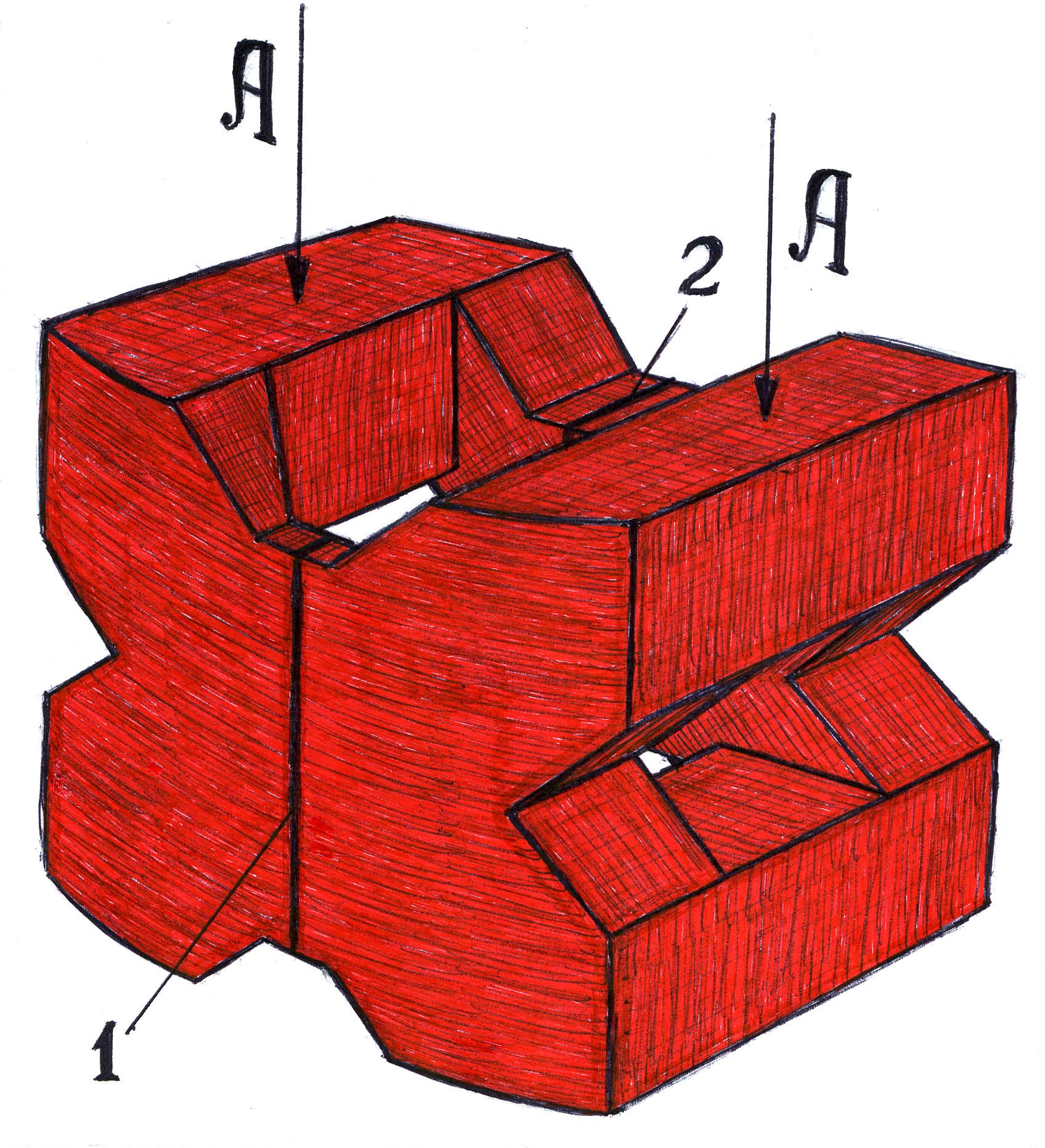
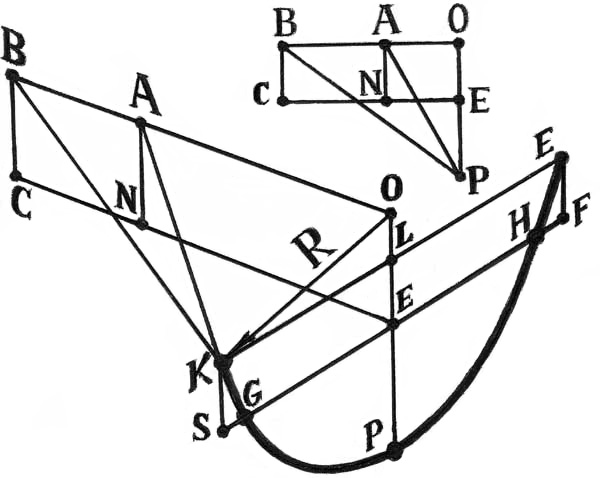
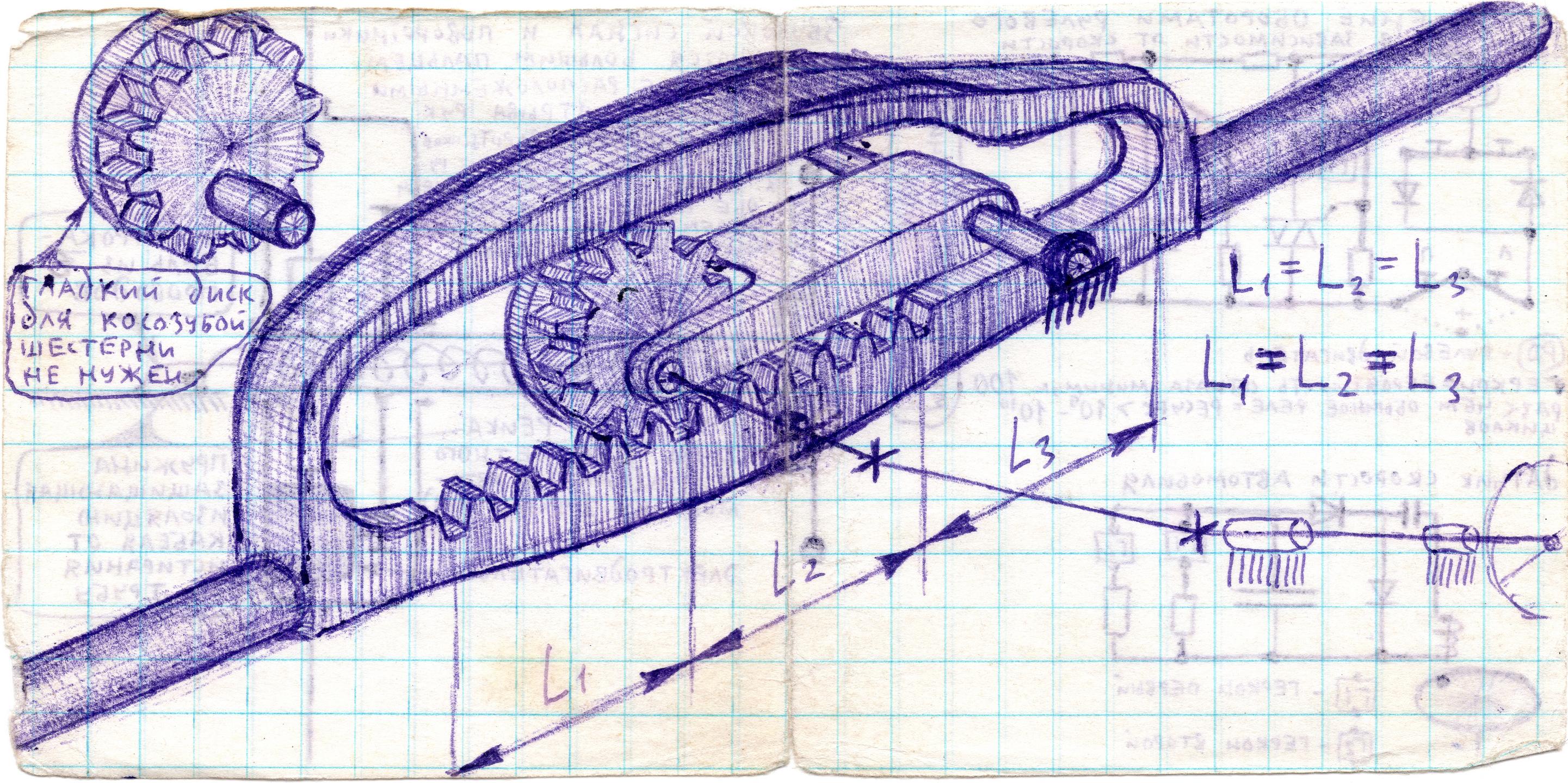
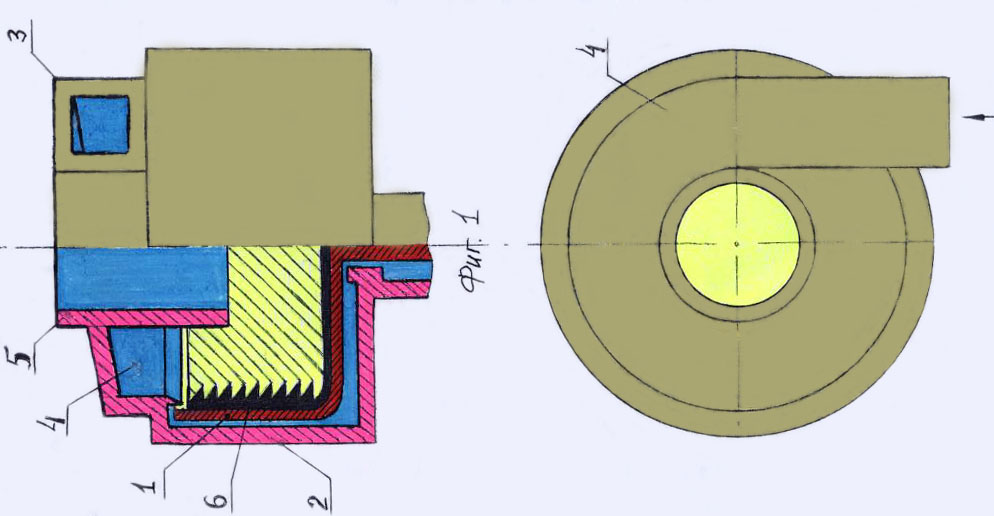
 institutrobotov.ru/1 литр бензина за 4 копейки.mp4 – видео
institutrobotov.ru/1 литр бензина за 4 копейки.mp4 – видео