28.04.2024
 टेलीप्रेजेंस और वर्चुअल रि यलि टी के लि ए होम सूट
टेलीप्रेजेंस और वर्चुअल रि यलि टी के लि ए होम सूट
(अवतार सूट, मेटावर्स मेंप्रवेश करनेके लि ए सूट, यूनि वर्सल सि म्युलेटर, होम टेलीपोर्ट)
टेलीप्रेजेंस सूट में, एक व्यक्ति प्रत्यक्ष बीम के साथ 6000 कि मी के दायरेमें0.1 सेकंड के नि यंत्रण वि लंब के
साथ एक वास्तवि क एंड्रॉइड सैनि क को नि यंत्रि त करता है, कम-कक्षा उपग्रह के माध्यम से3000 कि मी, केबल
सेलुलर इंटरनेट नेटवर्क के माध्यम से2000 कि मी।
शक्ति शाली इलेक्ट्रॉनि क युद्ध प्रणालि यों के खि लाफ मेरी सुरक्षा प्रणाली के रि पीटर्स के नेटवर्क के साथ,
एंड्रॉइड सैनि कों का नि यंत्रण त्रि ज्या 0.1 सेकंड की देरी (संचार + इसका डि क्रि प्शन + ड्राइव का संचालन) के
साथ 2000 कि मी है। मेरेआवि ष्कार हार्डवेयर देरी को 5 गुना कम करतेहैं।
1,82 मीटर तक की ऊंचाई वालेव्यक्ति के लि ए टेलीप्रेजेंस सूट: वजन 300 कि लोग्राम, ऊंचाई 2,7 मीटर।
लंबाई 2,87 मीटर। चौड़ाई 2,7 मीटर।
टेलीप्रेजेंस और वर्चुअल रियलिटी सूट अगले हजार वर्षों में विश्व उद्योग का सबसे लाभदायक उत्पाद है।
टेलीप्रेजेंस और वर्चुअल रि यलि टी सूट, पैसेके कारोबार के मामलेमें, अगलेहज़ार सालों मेंवैश्वि क उद्योग का
मुख्य उत्पाद है।
एक होम टेलीप्रेजेंस सूट को 2 लोगों द्वारा 20 मि नट मेंऐसेभागों का उपयोग करके इकट्ठा कि या जा सकता
हैजो एक मानक दरवाजेके माध्यम सेफि ट होतेहैं। मानव शरीर मेंसभी समायोजन सॉफ्टवेयर द्वारा 3
सेकंड मेंकि ए जातेहैं। टेलीप्रेजेंस सूट आपको अपनेपैरों के साथ अनुदैर्ध्य और अनुप्रस्थ वि भाजन करनेकी
अनुमति देता है।
एक टेलीप्रेजेंस और वर्चुअल रि यलि टी सूट एक एक्सोस्केलेटन हैजि समें3D कार्डन + 3D वीडि यो हेलमेट +
3D साउंड के अंदर बलों, कोणों और हाथों और पैरों के एक्ट्यूएटर्स के आनुपाति क सेंसर होतेहैं।
एक व्यक्ति संतुलन तालि काओंके अनुसार चलता है, दौड़ता है"ऊर्ध्वा धर द्रव्यमान केंद्र - फुलक्रम - शरीर का
क्षैति ज त्वरण।" गर्दन के पास शरीर त्वरण सेंसर चलनेपर पार्श्व , अनुदैर्ध्य और क्षैति ज त्वरण को मापता है।
एंड्रॉइड और उसके ऊर्ध्वा धर 3D कार्डन का संतुलन एक व्यक्ति को संचारि त करता है
बैकपैक नेएंड्रॉइड के द्रव्यमान के केंद्र को बदल दि या है- एक आवाज इंटरफ़ेस वाला व्यक्ति हाथों, पैरों और
कै मरे के कोणों के शन्ू य बि दं ओु ं को ऊर्ध्वा धर से समायोजि त करेगा ताकि चलते समय झकु ना न पड़।े
अरबों रि मोट जॉब्स के साथ टेलीप्रेजेंस और वर्चुअल रि यलि टी सूट जनसंख्या की बढ़ती उम्र की समस्या को
हल करेगा और अंतरमहाद्वीपीय धन हस्तांतरण की संख्या को अरबों गुना बढ़ाएगा। अवतार को नि यंत्रि त
करनेसेव्यक्ति कम थकता है- एंड्रॉइड अधि क मजबूत, अधि क लचीला होता है।
2040: वैश्वि क उद्योग मेंधन का 33% हि स्सा टेलीप्रेजेंस और वर्चुअल रि यलि टी सूट का उत्पादन है, अन्य
20% रोबोट अवतारों का उत्पादन है।
टेलीप्रेजेंस सूट मानव जाति का सबसेसार्वभौमि क इंटरफ़ेस है - यह जमीन पर आधारि त हवाई पानी के नीचेके
ड्रोन, उत्खननकर्ता , बुलडोजर, कि सी भी उपकरण के रि मोट कंट्रोल के ऑपरेटर को सभी सूचना चैनलों का
100% देता है।
एक हाथ के इशारेसे, ऑपरेटर एक वर्चुअल कंप्यूटर चालूकरेगा, एक नि यंत्रण नि काय का चयन करेगा, और
वास्तवि क नि यंत्रणों सेस्पर्शनीय रूप सेअप्रभेद्य वर्चुअल नि यंत्रणों सेउपकरणों को नि यंत्रि त करेगा। ऑपरेटर
के एक्सोस्केलेटन की ड्राइव कि सी भी नि यंत्रण को पुन: पेश करती है: स्टीयरि ंग व्हील, जॉयस्टि क, समायोजन
पहि यों के साथ नि यंत्रण पैनल...
टेलीप्रेजेंस सूट मानव जाति का सबसेसार्वभौमि क सि म्युलेटर है - यह पायलटों, टैंकरों, स्नाइपर्स, मशीन
गनर्स, हाथ सेहाथ की लड़ाई मेंसैनि कों, एस्केवेटर, वेल्डर, मि लर्स, ग्राइंडर्स को प्रशि क्षि त करेगा ....
पैराशूटि स्टों को गि रनेपर शरीर को नि यंत्रि त करना सि खाएगा - हाथों, पैरों की स्थि ति के अनुसार, सॉफ्टवेयर,
मापदंडों की गणना करता है, पैराशूटि स्ट को घुमाता है।
टेलीप्रेजेंस सूट मानव जाति का सबसेसार्वभौमि क उत्पाद है - यह परि वहन, टेलीफोन और आधेव्यवसायों की
शि क्षा प्रणाली की जगह लेता है। टेलीप्रेजेंस सूट और वर्चुअल रि यलि टी मेंसंचार फोन द्वारा संचार को पार कर
जाएगा।
टेलीप्रेजेंस सूट मेटावर्स का प्रवेश द्वार है: अरबों लोग एक ही समय मेंएक ग्रह (आकाशगंगा) के पैमानेपर एक
ऑनलाइन रोल-प्लेइंग गेम खेल रहेहैं। पैसा कमाना, खेल के प्रति भागि यों के साथ लाभदायक संबंध। मनी
टर्नओवर द्वारा बुनि यादी ढांचेके साथ मेटावर्स की अवतार साइटेंअन्य सभी प्रकार के व्यवसाय को पार कर
जाएंगी।
खोज इंजन 6000 कि लोमीटर के दायरेमेंअवतार कर्मचारी को खोजेगा, रजि स्ट्रार द्वारा काम को रि कॉर्ड
करेगा। अवतार नौकरि यों की ऑनलाइन श्रम एक्सचेंजों (नौकरी की गुणवत्ता रेटि ंग + कर्मचारी की पेशकश की
कीमत) मेंनीलामी होती है। कार्य की गुणवत्ता रेटि ंग: ग्राहक रेटि ंग + कर्मचारी की मांग।
खोज इंजन 6000 कि लोमीटर के दायरेमेंअवतार-कर्मचारी को खोजेगा, रजि स्ट्रार के रूप मेंकाम को रि कॉर्ड
करेगा। ऑनलाइन श्रम एक्सचेंजों मेंकाम करनेवालेअवतार-स्थानों की नीलामी (नौकरी की गुणवत्ता रेटि ंग +
कर्मचारी की पेशकश की कीमत) होती है। कार्य की गुणवत्ता रेटि ंग: ग्राहक मूल्यांकन + कर्मचारी की मांग।
अवतार-कार्यकर्ता काम पर जानेके लि ए ईंधन खर्च नहींकरता है - मानवता द्वारा ईंधन और ऊर्जा की खपत
10 गुना कम हो जाएगी।
सभी आकारों की घरेलूबच्चों की एंड्रॉइड गुड़ि या को इंटरनेट के माध्यम सेनैनी, अभि नेत्रि यों, अभि नेताओं
द्वारा घरेलूटेलीप्रेजेंस पोशाक मेंनि यंत्रि त कि या जाता है, जो बच्चों के साथ संवाद करतेहैं।
एंड्रॉइड खनि क खदानों मेंदुर्लभ पृथ्वी धातुओंके अयस्क नि कालतेहैं, आर्कटि क महासागर के तल पर कुओंमें
तेल नि कालतेहैं। आर्कटि क मेंदुनि या के 30% तेल भंडार हैं। एंड्रॉइड-अग्नि शामक आग बुझामंगल ग्रह पर
टेलीप्रेजेंस सूट मंगल और चंद्रमा पर रहनेयोग्य ठि कानों को स्वयं-सहायक बनानेकी तकनीक है। उपग्रह
सेलुलर संचार द्वारा नेवि गेशन, मंगल और चंद्रमा पर कहींभी एंड्रॉइड का चौबीसों घंटेसंचालन। 30 मीटर तक
की ऊंचाई वालेएंड्रॉइड ऑब्जेक्ट बनातेहैं, 10 सेमी की ऊंचाई वालेएंड्रॉइड पाइप मेंसंचार माउंट करतेहैं।
एंड्रॉइड अवतार के साथ, मनुष्य एक अंतरि क्ष उद्योग, ग्रहों, क्षुद्रग्रहों मेंशहर बनाएगा। अंतरि क्ष व्यवसाय
पृथ्वी की तुलना मेंएक अरब गुना अधि क उत्पादन करेगा।
मंगल पर
70000 डॉलर की कीमत वालेटेलीप्रेजेंस सूट और 40000 डॉलर की कीमत वालेटाइटेनि यम नाइट्राइड-कोटेड
(घर्षण धूल सेसुरक्षा) एंड्रॉइड की ओवरहाल सेपहलेकी अवधि 2 शि फ्ट में3 साल है।
नासा का 10 मि लि यन डॉलर का स्पेससूट: मंगल की घर्षण धूल के बि ना 2 शि फ्ट मेंओवरहाल सेपहलेकी
अवधि 5 दि न। स्पेससूट के खर्च सेएलन मस्क की मार्टि यन कॉलोनी बर्बा द हो जाएगी। सेलुलर कनेक्शन वाले
टेलीप्रेजेंस सूट के बि ना, मंगल पर एक स्वायत्त बेस असंभव है।
अंतरि क्ष यान के सेंट्रीफ्यूज मेंटेलीप्रेजेंस सूट क्षुद्रग्रहों, धूमकेतुओं, ग्रहों मेंसुनसान व्यापारि क ठि कानों के
एंड्रॉइड को नि यंत्रि त करता है।
एक स्वायत्त टैंकर, कंटेनर जहाज पर समुद्री डाकुओंनेहमला कि या - सुरक्षा एजेंसी सैटेलाइट और एक
अस्थायी पासवर्ड का उपयोग करके ति जोरि यों सेएंड्रॉइड सैनि कों को हटा देगी। वेमशीन गन, ग्रेनेड लांचर से
समुद्री डाकुओंको गोली मार देंगे। वेति जोरि यों मेंजाएंगे, उन्हेंअंदर सेबंद कर देंगे।
सि ग्नल ऑपरेटर
ड्रॉइड होम सि क्योरि टी गार्डएंपुलि स के आनेतक लुटेरेको हि रासत मेंरखेगा।
महामारी
वि शेषज्ञ, एंड्रॉइड की तरह, घातक महामारी वालेशहरों (सेना सेघि रे) मेंप्रयोगशालाओं, अस्पतालों मेंकाम
करतेहैं। टेलीप्रेजेंस सूट के बि ना, जीवाणुसंबंधी हथि यार राज्य को नष्ट कर देंगे
शहरी लड़ाइयों के लि ए सैन्य एंड्रॉइड
एक प्रक्षेपास्त्र सेक्षति ग्रस्त एक एंड्रॉइड सैनि क को दुश्मन सैनि क तक रेंगनेके लि ए केवल एक हाथ की
आवश्यकता होगी। एक साधारण सैनि क का जीवन $ 1 मि लि यन अनुमानि त है- 30 एंड्रॉइड सैनि कों के लि ए
पर्या प्त है। एंड्रॉइड को टेलीप्रेजेंस होम सूट के ऑपरेटरों द्वारा नि यंत्रि त कि या जाता हैजो 2000 कि मी तक
रि मोट होतेहैं(शोर-प्रूफ रि पीटर नेटवर्क की हार्डवेयर देरी को ध्यान मेंरखतेहुए)।
शहर में100 मीटर के लि ए स्थि ति गत युद्ध मेंहजारों सैनि कों नेअपनी जान देदी। आधेमीटर ऊंचे, शहरी
लड़ाइयों मेंमि नीएंड्रॉइड सैनि क भरेहुए सीवर, वेंटि लेशन शाफ्ट, गोलेसेदीवारों मेंदरारों के माध्यम सेदुश्मन
के घरों मेंघुस जातेहैं।
वि शेषज्ञ सर्वश्रेष्ठ ऑपरेटरों को सर्वश्रेष्ठ स्थि ति और सुरक्षा के साथ एंड्रॉइड सेजोड़ेंगे। एंड्रॉइड बचेहुए हि स्सों
सेनए एंड्रॉइड को इकट्ठा करेंगे: आप लड़ाई मेंरि पीटर एंड्रॉइड सेसेलुलर नेटवर्क में1 मि लि यन एंड्रॉइड रख
सकतेहैं। एंड्रॉइड का नि र्मा ण एंड्रॉइड द्वारा असेंबली के लि ए अनुकूलि त है।
टेलीप्रेजेंस सूट ऑपरेटर
वस्तुपर दुश्मन सैनि कों के हमलेको दर्शा ता है, बारी-बारी सेसौ एंड्रॉइड सैनि कों, सौ क्वाड्रोकॉप्टर,
रि मोट-नि यंत्रि त रोबोट मोर्टा र (टीवी कैमरेके साथ नि र्देशि त खानों) को नि यंत्रि त करता है। उच्च कोणीय
संकल्प के साथ ध्वनि और भूकंपीय तरंगों के सेंसर।
माइक्रोफोन के साथ एंड्रॉइड (क्वाड्रोकॉप्टर) का सॉफ्टवेयर एक गोली के प्रक्षेपवक्र को नि र्धा रि त करेगा जो
ध्वनि के आगमन के समय मेंअंतर से, डॉपलर प्रभाव + त्रि कोण के वक्र द्वारा उड़ गई।
दुश्मन की बैरल कि तनी दूर स्थि त हैऔर उसकी गोली की गति एंड्रॉइड (क्वाडकॉप्टर) सॉफ्टवेयर द्वारा शॉक
वेव के Z-ग्राफ सेध्वनि ग्राफ की नि कटता के गुणांक द्वारा नि र्धा रि त की जाती है। माइक्रोफोन ध्वनि वक्र का
आकार शॉक वेव के Z-ग्राफ के जि तना करीब होगा, बैरल बुलेट ध्वनि के बराबर वॉल्यूम (सॉफ्टवेयर टेबल) पर
उतना ही दूर होगा।
टेलीप्रेजेंस सूट सॉफ्टवेयर एक एंड्रॉइड (क्वाडकॉप्टर) को ढूंढता हैजि सके करीब एक गोली उड़ी, ऑपरेटर को
उस पर स्वि च करता है, स्क्रीन पर एंड्रॉइड, दुश्मन का स्थान (एंड्रॉइड, क्वाडकॉप्टर के टीवी कैमरे) दि खाता है।
ऑपरेटर कैमरा एंगल, सॉफ्टवेयर के एल्गोरि दम का चयन करेगा और एल्गोरि दम की संख्या नि र्दि ष्ट करेगा।
स्क्रीन पर स्वचालि त लक्ष्य ट्रैकि ंग, सटीक फ्रेम समय के साथ लक्ष्य लेबल संचारि त करना, नि यंत्रण देरी के
साथ भी लक्ष्य को सटीक रूप सेहि ट करेगा। एंड्रॉइड सॉफ्टवेयर फ्रेम-दर-फ्रेम पहचान के लि ए फ्रेम को पीछे
स्क्रॉल करेगा, लक्ष्य पर नि शान को ट्रैक करेगा।
लक्ष्य की स्वचालि त ट्रैकि ंग इसेसबसेकमजोर जगह पर स्वचालि त रूप सेनष्ट कर देगी, बहुत कम
गोला-बारूद खर्च करेगी। "ट्रि गर सेंसर-शॉट" सैन्य रोबोट की एआई गति 0,003 सेकंड है, जबकि जीवि त
सैनि क के लि ए यह 0,3-3 सेकंड है।
एंड्रॉइड टैंकर
अल्ट्रासोनि क या इन्फ्रारेड "मि त्र-शत्रु" पहचान संकेत चालूकरता है। सि ग्नल उत्सर्जन की समय सारणी को
जानतेहुए, अपनेकंधों पर माइक्रोफोन के साथ एक एंड्रॉइड सैनि क टैंकर-एंड्रॉइड की दूरी, दि शा नि र्धा रि त
करेगा और उत्तर देगा। टैंकर-एंड्रॉइड एंड्रॉइड सैनि क सेबैकपैक हटा देगा और बैटरी और गोला-बारूद के साथ
एक नया बैकपैक सुरक्षि त करेगा।
अवतार साइटेंकि सी भी पैमानेकी बहु-उपयोगकर्ता कंप्यूटर आभासी लड़ाइयों मेंसेना को प्रशि क्षि त करती हैं।
सॉफ्टवेयर अवतार और टेलीप्रेजेंस सूट के ड्राइव और सेंसर को सीमि त करतेहुए चोट का अनुकरण करता है।
एक भाड़ेके ऑपरेटर की स्थि ति और भुगतान वि शेषज्ञों द्वारा फ्रेम दर फ्रेम मूल्यांकन की गई चैंपि यनशि प के
परि णामों के आधार पर नि र्धा रि त कि या जाता है।
मशीन गन सेऑप्टि क्स की सुरक्षा के लि ए, एंड्रॉइड मेंप्रगति शील 3 डी सस्पेंशन के साथ टेलीवि जन कैमरों के
सुपरहार्ड मि रर-पेरि स्कोप हैं(क्रॉस-कंट्री मोटरसाइकि ल के पि छलेपहि येके सस्पेंशन की तरह कठोरता आसानी
सेअनि श्चि त काल तक बढ़ जाती है) - कि सी भी प्रभाव वेक्टर के साथ गोलि यों, टुकड़ों की गति को कमजोर
कर देगा।
टंगस्टन-मोलि ब्डेनम मि श्र धातुके साथ दर्पण, कम पि घलनेवालेमि श्र धातुके साथ परावर्तक कोटि ंग के
साथ। बुलेट स्क्रैच - हम टंगस्टन-मोलि ब्डेनम मि श्र धातुके साथ दर्पण के माध्यम सेएक वि द्युत प्रवाह
पारि त करतेहैं। वर्तमान कम पि घलनेवालेमि श्र धातुके परावर्तक कोटि ंग को पि घला देगा, बि ना खरोंच के
जम जाएगा।
एंड्रॉइड सैनि कों के पास दीवारों के माध्यम सेपरावर्ति त एक्स-रेपर एक्स-रेदृष्टि , दीवारों के माध्यम से
माइक्रोवेव दृष्टि के साथ एक स्पंदि त एक्स-रेसर्चलाइट है। एंड्रॉइड सैनि क एक दूसरेको संकीर्ण रूप से
नि र्देशि त बहु-आवृत्ति अल्ट्रासोनि क बीम के साथ डि जि टल वीडि यो देतेहैं।
2 कि मी की दूरी पर, पावर रेस की स्थि ति यों में, संकीर्ण रूप सेनि र्देशि त बीम के साथ वि द्युत चुम्बकीय तरंगों
की सभी आवृत्ति यों को लगातार अवरुद्ध करना असंभव है। संकीर्ण रूप सेनि र्देशि त बीम के साथ टि क तरंगें
असंभव हैं। छद्म यादृच्छि क आवत्तिृ हॉपि गं के साथ बहु-आवत्तिृ डि जि टल रेडि यो सचं ार सि ग्नल की तलु ना में
10000 गुना अधि क हस्तक्षेप स्तर के साथ संचालि त होता है।
दुश्मन केवल 100-200 मीटर पर 10000 गुना अधि क मजबूत बाधा उत्पन्न कर सकता है, जि समेंबहुत
महंगा इलेक्ट्रॉनि क युद्ध उपकरण नहींहै। एक ही समय मेंहजारों रेडि यो आवृत्ति यों के साथ संकीर्ण बीम
रि पीटर्स के माध्यम सेसंचार। एंड्रॉइड रि सीवर लाभ को समायोजि त करता है: मजबूत हस्तक्षेप - रि सीवर के
लाभ को कम करेगा, ट्रांसमीटर की शक्ति को बढ़ाएगा।
एक एंड्रॉइड सनिै क एक बकै पकै मेंमोर्टा र से होमि गं माइंस के साथ एक इलेक्ट्रॉनि क यद्ु ध उपकरण को
स्वचालि त रूप सेनष्ट कर देगा। इलेक्ट्रॉनि क युद्ध उपकरण बंद हो जाएगा - खदान पीजो-जाइरोस्कोप पर
जड़त्वीय नेवि गेटर का उपयोग करके इलेक्ट्रॉनि क यद्ु ध सकं े त के रि सेप्शन के बि दं ओु ं द्वारा उड़ान पथ को
नि र्दि ष्ट करेगा।
हैकर हस्तक्षेप की संभावना नहींहै: एक संवाद पासवर्ड + प्रत्येक 1-5 सेकंड मेंचैनल सि फर का संवाद
परि वर्तन + एक यादृच्छि क संख्या जनरेटर सि ग्नल जोड़ना + अज्ञात संपीड़न एल्गोरि दम + रि सीवर सि ग्नल
आगमन कोण के इति हास के लि ए लेखांकन।
संचार रि पीटर्स का नेटवर्क
एंड्रॉइड सैनि कों के आगेबढ़नेसेपहले, "ऑपरेटर - एंड्रॉइड" सि ग्नल के प्राथमि क रि पीटर्स को सामनेकी पूरी
चौड़ाई के साथ पीछे की ओर रखा जाता है। उनसे, केबल बि छानेवालेरोबोट एक खाई मेंफाइबर-ऑप्टि क
केबल बि छातेहैं, जि सेचाकू सेजमीन में5-10 सेमी की गहराई तक काटा जाता है। फाइबर ऑप्टि क केबल
भूमि गत होकर फ्रंट लाइन के पास सेकेंडरी रि पीटर्स तक जाती हैं।
सेकेंडरी रि पीटर्स एक्स-रे, पराबैंगनी या बैंगनी कि रणों का उपयोग करके ऑपरेटर सेसि ग्नल भेजनेवाली
बीम-1 और एंड्रॉइड पर बीम-2 को नि र्देशि त करतेहैं। एंड्रॉइड के मॉड्यूलेटि ंग कॉर्नर रि फ्लेक्टर सेपरावर्ति त
बीम-2 प्राप्त होता है(एंड्रॉइड सेसि ग्नल)।
कि रणों-1-2 की तरंग दैर्ध्य को वायुमंडल मेंअधि कतम अवशोषण, पर्या वरण मेंन्यूनतम प्रति दीप्ति के
सि द्धांत के अनुसार चुना जाता है, ताकि दुश्मन के ड्रोन कि रणों-1-2 को न देख सकें।
सेकेंडरी रि पीटर्स एक बीम द्वारा सैकड़ों डि जि टल सि ग्नल "एंड्रॉइड ऑपरेटर" को संचारि त करतेहैं। एन्ड्रॉइड्स
के सि र मेंएक तृतीयक रि पीटर (सेंसर युक्त लेजर) सि ग्नल को सामनेके एन्ड्रॉइड सैनि कों तक पहुंचाता है।
मॉड्यूलेटि ंग कॉर्नर रि फ्लेक्टर (मेरा आवि ष्कार) ड्राइव और स्थि रीकरण प्रणालि यों के बि ना, एंड्रॉइड सेंसर
रि पीटर की लेजर बीम की परावर्ति त ऊर्जा के मॉड्यूलेशन के माध्यम सेटेलीप्रेजेंस सूट को संकेत देतेहैं।
मॉड्यूलेटि ंग कॉर्नर रि फ्लेक्टर के तीन दर्पणों मेंसेप्रत्येक मेंएक अलग मॉड्यूलेटर होता हैजो परावर्ति त लेजर
बीम की चमक को बदलता है- एक डि जि टल सि ग्नल संचारि त करता है।
लेजर बीम की 2 तरंग दैर्ध्य पर एंड्रॉइड के साथ संचार। लंबाई -1 एक फोटोसेल के लि ए बीम की तरंग है।
लंबाई-2 मॉड्यूलेशन के साथ एक पारस्परि क कोण परावर्तक के लि ए बीम की तरंग है। एंड्रॉइड फीडबैक पर
ऊर्जा बर्बा द नहींकरता है, केवल मॉड्यूलेशन पर। दर्पणों पर फोटोसेल और कॉर्नर रि फ्लेक्टर मेंएंटी-इंटरफेरेंस
फि ल्टर होतेहैं। एंड्रॉइड के सि र, कंधों और हथेलि यों मेंमॉड्यूलेटि ंग कॉर्नर रि फ्लेक्टर।
एंड्रॉइड लेजर बीम सूचना के प्रत्येक पैकेट मेंएक संवाद सि फर के साथ "मि त्र या शत्रु" की पहचान करेगा। पैकेट
के अंकों पर सि फर फैला हुआ है- डि क्रि प्शन के खि लाफ सुरक्षा। यदि मजबूत हस्तक्षेप है, तो एंड्रॉइड दोनों
पक्षों के लि ए सूचना के पैकेट को छोटा कर देगा।
प्रत्यक्ष बीम के बजाय, आप कई दीवारों सेपरावर्ति त बीम या एंड्रॉइड रि पीटर्स की एक लबं ी श्रखंृ ला का उपयोग
कर सकतेहैं। दुश्मन नेमल्टीस्पेक्ट्रल स्मोक स्क्रीन के ग्रेनेड का इस्तेमाल कि या - इसके रि पीटर्स दो लेजर
आवृत्ति यों की संश्लेषि त बीट्स सेरेडि यो तरंगों को छेद देंगे। संश्लेषि त रेडि यो तरंग की लंबाई संचार ट्रैफ़ि क के
अनुसार चुनी जाती है। जि तना अधि क ट्रैफ़ि क होगा, संश्लेषि त रेडि यो तरंग की लंबाई उतनी ही कम होगी।
संचार क्षेत्र को छोड़कर एक सैन्य एंड्रॉइड एक रि पीटर लगाता है। ऑप्टि कल फाइबर, एंड्रॉइड कॉइल सेखुलते
हुए, रि पीटर के साथ संचार बनाए रखता है। दीवार के पीछे एंड्रॉइड के साथ रेडि यो संचार होता है, एक्स-रे
संचार।
एक्स-रेफीडबैक के डि जि टल सि ग्नल का ट्रांसमीटर - एक्स-रेपल्स - एक समाक्षीय टंगस्टन प्रति रोधक है,
जि स पर 100 kV के अल्ट्राशॉर्ट पल्स एक समाक्षीय केबल और एक संधारि त्र के माध्यम सेप्रेषि त होतेहैं। एक
उच्च क्यू-फैक्टर वाला संधारि त्र करंट को सीमि त करेगा, एक्स-रेपल्स के सामनेकी स्थि रता को बढ़ाएगा।
डि जि टल एक्स-रेसि ग्नल का रि सीवर सि लि कॉन फोटोडायोड पर सीज़ि यम आयोडाइड है।
सैन्य एंड्रॉइड का शहरी युद्ध: एआई द्वारा बीम को परावर्ति त करनेवाली सतहों (थर्मल इमेजर) का चयन
करनेवालेरि पीटर ड्रोन सेसंकीर्ण रूप सेनि र्देशि त इन्फ्रारेड लेजर संचार। इन्फ्रारेड हस्तक्षेप: टेराहर्ट्ज़, एक्स-रे
द्वारा संचार।
एंड्रॉइड के सामने, पीछे, कि नारेऔर शीर्ष पर मॉड्यूलेटि ंग कॉर्नर रि फ्लेक्टर क्रमांकि त हैं। जड़त्वीय नेवि गेटर,
थर्मल इमेजर छवि (बीम के आगमन के कोण) और हस्तक्षेप के अनुसार, सॉफ़्टवेयर (ऑपरेटर) यह पता
लगाएगा कि एंड्रॉइड के कौन सेमॉड्यूलेटि ंग कॉर्नर रि फ्लेक्टर चालूकरनेहैं।
एआई ऑपरेटर की सेटि ंग्स की टेम्पलेट प्रति क्रि याएँ। पैटर्न: पहचान; नि र्देशांक और समय द्वारा नि र्दि ष्ट क्षेत्र
मेंदुश्मन सैनि कों का वि नाश, यदि रेडि यो पहचान "मि त्र या शत्रु" के सि ग्नल के लि ए कोई प्रति क्रि या पासवर्ड
नहींहै।
लेज़र एंड्रॉइड को अंधा नहींकरेंगे- टेलीवि ज़न कैमरों के स्पेक्ट्रल, ध्रुवीकरण (दाएँ, बाएँघुमाव का गोलाकार
ध्रुवीकरण + 2 रैखि क अक्ष) फ़ि ल्टर। फ़ि ल्टर एल्गोरि थ्म: वीडि यो सि ग्नल के उच्च ट्रेबल की अधि कतम सीमा
और छवि की पतली रेखाओंकी कुल लंबाई।
एंड्रॉइड सैनि क दीवार या पाइपलाइनों के माध्यम सेअपनेहाथ की हथेली सेध्वनि या अल्ट्रासाउंड संचारि त
करता है, अपनेहाथ को 2D वाइब्रेटर के साथ उन तक पहुंचाता है। एक 2D वाइब्रेटर एक समय मेंएक पाइप
को पाइप मेंअनुप्रस्थ तरंग के साथ चैनल-1 और पाइप मेंअनुदैर्ध्य तरंग के साथ चैनल-2 को एक साथ भेजने
की अनुमति देता है।
दो एंड्रॉइड सैनि क, पाम वाइब्रेटर का उपयोग करतेहुए, पाइप के दोनों सि रों सेचुपचाप अल्ट्रासाउंड भेजतेहुए,
आवृत्ति यों को पीटकर पाइप के बीच मेंऑपरेटर की आवाज़ पैदा करेंगे। वेआवाज़ को पाइप के साथ आगेबढ़ने
के लि ए मजबूर करेंगे। यह मोनोलि थि क दीवारों मेंभी संभव है।
अंडरवाटर एंड्रॉइड
पनडुब्बी सेकेबल द्वारा नि यंत्रि त, अंडरवाटर मोटरसाइकि ल पर सैन्य एंड्रॉइड थर्मा इट रॉड के साथ दुश्मन के
जहाज के नीचेसेजलेंगे। सि लेंडर सेपरि णामी छेद मेंतरल वि स्फोटक पंप करके, वेदुश्मन को कमजोर कर
देंगे।
डीप-सी एंड्रॉइड
दो एंड्रॉइड के साथ एक डीप-सी रि पीटर का उपयोग डूबेहुए जहाजों सेएन्क्रि प्शन उपकरण या परमाणुहथि यार
नि कालने, गि रेहुए दुश्मन के ड्रोन की खोज करनेके लि ए कि या जाता है। एक बैटरी और सर्चलाइट के साथ
एक रि पीटर एक पनडुब्बी सेकेबल-1 पर उतरता है। केबल-1 एक बि जली की आपूर्ति + एक सि ग्नल
ऑप्टोकपलर है।
एंड्रॉइड डूबेहुए जहाज के अंदर केबल के माध्यम सेरि पीटर सेउतरतेहैं। एंड्रॉइड एक पल्स बैटरी मेंऔर पानी
के नीचेवेल्डि ंग या जहाज के डि ब्बों को काटनेके लि ए एक कैपेसि टर मेंऊर्जा संग्रहीत करतेहैं।
एक मि नीएंड्रॉइड वेल्डर
परमाणुऊर्जा संयंत्रों के हीट एक्सचेंजर के लीक होनेवालेपतले-दीवार वालेपाइपों को वेल्ड करेगा।
माइक्रोएंड्रॉइड सर्जन
सुपरहार्ड मटीरि यल सेबना 3 मि मी ऊंचा सर्जन है। एक पतली, लंबी, फि सलन वाली रि बन केबल जि समेंएक
समाक्षीय सि ग्नल केबल और एक समाक्षीय बि जली आपूर्ति केबल शामि ल है, माइक्रोएंड्रॉइड सर्जन के
कोक्सीक्स सेचलती है। डुप्लि केट एक्स-रेकंट्रोल चैनल।
माइक्रोएंड्रॉइड ड्राइव रैखि क पीजोमोटर्स हैजो लंबी प्लेट-पी को घुमातेहैं। पीजोमोटर्स को माइक्रोएंड्रॉइड के
शरीर मेंएक पीजोट्रांसफॉर्मर द्वारा संचालि त कि या जाता है। माइक्रोएंड्रॉइड एंगल ससें र की भमिू का चबंु कीय
रूप सेकठोर सामग्री के साथ प्लेट-पी के पीजोमोटर्स द्वारा नि भाई जाती है।
प्लेट-पी पर चबंु कीय कोण के नि शान हैं, जि न्हें8 लगातार अतं राल वाले चबंु कीय सि र द्वारा पढ़ा जाता है। एक
चर आवत्तिृ चबंु कीयकरण धारा के साथ, चबंु कीय सि र एक नि श्चि त प्लेट-पी से भी पर्णू कोण के डि जि टल कोड
को पढ़ता है।
माइक्रोएंड्रॉइड की रक्त वाहि काओंमें, एक धक्का देनेवाला वि द्युत चुम्बकीय क्षेत्र (दोलन की आधी अवधि
तेजी सेबढ़ती है, धीरे-धीरेघटती है) और एक आकर्षक वि द्युत चुम्बकीय क्षेत्र (दोलन के आधेचक्र का तेज
अग्रणी कि नारा, कोमल अनुगामी कि नारा) चलता है, जो उस पर केंद्रि त होता है। यह क्षेत्र एक चरणबद्ध सरणी
एंटीना द्वारा बनाया जाता है।
एक चरणबद्ध सरणी एंटीना एक कंु डल का जाल होता है जि समेंएक घमु ावदार होता है जि से रोगी पर रखा
जाता है। चरणबद्ध सरणी एंटीना एक साथ 4 कि रणेंप्रदान करता है। कि रणें1-3 धक्का देती हैं। कि रणें-2-4
आकर्षक होती हैं।
वेक्टर जोड़ के नि यम के अनुसार, कि रणेंमाइक्रोएंड्रॉइड को कि सी भी दि शा मेंलेजाती हैंजि समेंसर्जन अपना
बायाँहाथ घुमाता है, अपनी बाईं हथेली को सॉफ्टवेयर के लि ए एक वि शेष इशारेमेंमोड़ता है। सर्जन रक्त
वाहि का की दीवार के खि लाफ माइक्रोएंड्रॉइड के चबंु कीय क्षेत्र को दबाने के लि ए वि शषे इशारों का उपयोग करता
हैयदि रक्त प्रवाह इसेदूर लेजाता है।
एक माइक्रोएंड्रॉइड एक रक्त के थक्के या कैंसरग्रस्त ट्यूमर को आरी या गर्म धागेसेटुकड़ों मेंकाटता है, और
इसे एक बगै मेंपकै करता है। चबंु कीय क्षेत्र को हि लाने से, इसे के बल द्वारा एक बगै के साथ बाहर नि काला
जाता है। माइक्रोएंड्रॉइड सर्जन टूटी हुई रीढ़ की हड्डी के कटेहुए तंत्रि का तंतुओंको सि ल देगा, स्टेम सेल का
लक्षि त इंजेक्शन लगाएगा।
रक्त वाहि का के तरल वातावरण में, माइक्रोएंड्रॉइड अपनेफैलेहुए पैरों के साथ कैंसरग्रस्त ट्यूमर सेटुकड़े
काटते समय अपनी घर्णू न शक्ति यों को बनाए रखता है। चबंु कीय क्षेत्र चबंु कीय पदार्थों से बने माइक्रोएंड्रॉइड को
रक्त वाहि का की दीवार के खि लाफ दबाता है।
सर्जन, चरणबद्ध सरणी एंटीना को नि यत्रिं त करते हुए, चबंु कीय वेक्टर-1 के अनसु ार स्थानीय चबंु कीय
ऊर्ध्वा धर सेट करता है, और चबंु कीय वेक्टर-2 के अनसु ार माइक्रोएंड्रॉइड का शन्ू य अज़ीमथु (सर्जन की स्क्रीन
मेंदि खाई देता है)। वेक्टर-1 लंबेसमय के लि ए, वेक्टर-2 थोड़ेसमय के लि ए, बारी-बारी सेचरणबद्ध सरणी
एंटीना देता है। वेक्टर-1-2 सि ग्नल कोड को अलग करता है।
माइक्रोएंड्रॉइड के सि र मेंदायाँस्पॉटलाइट दाएँटीवी कैमरेके साथ एक वाइपर साझा करता है। इसी तरह, बायाँ
एलईडी स्पॉटलाइट।
माइक्रोएंड्रॉइड का वि वरण मेरेद्वारा आवि ष्कार कि ए गए सीएनसी माइक्रोस्टैंक द्वारा बनाया जाएगा।
आयामों को प्रक्षेपण प्रणाली द्वारा मापा जाता है। उपकरण: शून्य तापीय वि स्तार के साथ एक कठोर मि श्र
धातुके साथ अल्ट्रा-फाइन-ग्रेन्ड डायमंड डि स्क।
हीरे के साथ एक अल्ट्रासोनि क मग्ै नेटोस्ट्रि क्टि व रॉड के साथ छेद ड्रि ल कि ए जाते हैं। ड्रि लि गं करते समय,
माइक्रो-वर्कशॉप गि म्बल की ड्राइव इसे घमु ाती है ताकि ऊपर से भाग, नीचे से ड्रि लि गं रॉड, चि प्स नीचे गि रें।
सि रेमि क गाइड के घर्षण के गुणांक मेंपरि वर्तन सेउपकरण कंपन के स्वचालि त मुआवजेके साथ उपकरण का
पीजो ड्राइव। माइक्रो एंड्रॉइड का डि ज़ाइन माइक्रो मशीनों के लि ए अनुकूलि त है।
मशीन ऑपरेटर माइक्रोस्टैंक के पीजोमाइक्रोफोन की आवाज़ के आधार पर सामग्री प्रसंस्करण मोड का चयन
करेगा, वैक्यूम माइक्रोमैन्युफ़ैक्टरी के अंदर गाइड के साथ चलनेवालेटेलीवि ज़न कैमरेके साथ माइक्रोस्कोप
मेंदेखेगा। माइक्रोमैन्युफ़ैक्टरी के एक्स-रेटोमोग्राफ़ (घूमनेवालेहि स्से) के साथ भागों मेंदोषों का नि रीक्षण।
टेलीप्रेजेंस सूट सेनि यंत्रि त, इलेक्ट्रॉन बीम और पीसनेवालेऔजारों के साथ एक माइक्रो-मशीन पर एक
वैक्यूम माइक्रो-कारखानेमेंमाइक्रोएंड्रॉइड-कर्मचारी माइक्रोएंड्रॉइड-सर्जन के ब्रांडेड बक्सों मेंनि र्मा ण, संयोजन
और पैकि ंग करेंगे।
अन्य ग्रहों पर पर्वतारोहण
टेलीप्रेजेंस सूट मेंवर्चुअल स्पेस वेबसाइट के उपयोगकर्ता पर्वतारोहि यों के एक समूह की तरह डि जि टल
मानचि त्रों, माध्यम के मापदंडों (घर्षण, कठोरता, प्रवाहशीलता) का उपयोग करके मंगल ग्रह के पहाड़ों पर चढ़ते
हैं। 62% वजन मुआवजेके साथ। शुक्र के पहाड़ों में, हवा के बल को एक 3D जि म्बल, एक सक्रि य 3D नि लंबन
द्वारा अनुकरण कि या जाता है।
एक फि ल्म मेंअभि नेताओंकी हरकतों को कैप्चर करना
टेलीप्रेजेंस सूट द्वारा कई अभि नेताओंकी हरकतों को एक साथ कैप्चर करनेसेएनि मेटेड फि ल्मों के गति शील
दृश्यों और साधारण फि ल्मों के कंप्यूटर ग्राफि क्स बनानेकी लागत मेंतेजी आएगी और कमी आएगी।
टेलीप्रेजेंस सूट के कोणों के 12-बि ट सेंसर अभि नेताओंकी हरकतों को कैप्चर करनेकी सटीकता को 100 गुना
बढ़ा देंगे।
सॉफ्टवेयर वास्तवि क समय मेंमंच की सहायक सतह की ऊंचाई, टेलीप्रेजेंस सूट मेंसभी अभि नेताओंके लि ए
इसका आकार बदलता है। रि यल-टाइम सॉफ़्टवेयर टेलीप्रेज़ेंस सूट के संकेतों को तीन टेलीवि ज़न कैमरों
(अंतरि क्ष के दो अक्षों मेंस्टीरि यो प्रभाव के साथ गोलाकार वि कृति यों के सॉफ़्टवेयर सुधार के साथ दृश्य का 3D
स्कैन देता है) के साथ एक वास्तवि क दृश्य शूट करनेवालेक्वाडकॉप्टर के संकेतों के साथ एक एकल चि त्र में
जोड़ता है।
तीन टीवी कैमरों के बजाय, आप एक टीवी कैमरा + लि डार का उपयोग कर सकतेहैं। कैमरामैन क्वाडकॉप्टर
को वास्तवि क दृश्य के साथ चलनेवालेबाहरी ऑप्टि कल बीकन सेजोड़नेके लि ए फीडबैक का उपयोग कर
सकता है। एक टेलीप्रेज़ेंस सूट गति शील मूवी दृश्यों को बनानेकी लागत को ~5 गुना कम कर देगा।
टेलीप्रेज़ेंस सूट परि योजना परमाणुहथि यारों सेकहींज़्यादा वि श्व इति हास की दि शा बदल देगी। मैंवैश्वि क
एकाधि कारवादी थॉमस एडि सन हूँ- मेरेपास इस वि षय पर 99% तैयार गैर-स्वामि त्व वाली प्रमुख खोज हैं:
होम टेलीप्रेज़ेंस सूट।
फ़ोर्स फीडबैक
दोनों दि शाओंमेंसेंसर को 4 अंक प्रेषि त करता है: कोण, कोणीय वेग, बल और बल के परि वर्तन की दर।
बल सेंसर के बि ना, बल प्रति क्रि या काम करती है, लेकि न अधि क ऊर्जा खपत, परजीवी कंपन का आयाम: कोण
मेल खाते हैं- क्लपिैं गं बल, पकड़ 0-100% उतार-चढ़ाव करती है - हाथ भार को कु चल देगा।
टेलीप्रेजेंस सूट (एक्सोस्केलेटन टेलीप्रेजेंस इंटरफ़ेस, एक्सोस्केलेटन अवतार इंटरफ़ेस) मेंएक व्यक्ति बाहों
और पैरों के एक्सोस्केलेटन के बल सेंसर को दबाता है। सेंसर, ड्राइव को चालूकरनेके बाद, व्यक्ति सेदूर
भागतेहैं, उसकी ताकत को शून्य करतेहैं, एंड्रॉइड की बाहों (पैरों) को अंतर की सीमा तक लेजातेहैं"एंड्रॉइड की
भुजा का कोण - मानव भुजा का कोण"।
एक्सोस्केलेटन ड्राइव की मदद से, बाहरी वातावरण कि सी व्यक्ति को नि यंत्रि त करता हैयदि उसका बल बाहरी
सेकम है। द्वि अक्षीय एंड्रॉइड धड़ झुकाव सेंसर के साथ एक्सोस्केलेटन 3डी जि म्बल एक्ट्यूएटर्स की कोणीय
प्रति क्रि या
सि गं ल-ससें र नि यत्रं ण: ड्राइव ससें र बल को हाथ (परै ) एक्सोस्के लेटन बल के स्थि रांक-1 पर रखता है। ससें र-1
की ऊपरी या नि चली सीमा सेपरेबल का स्थानांतरण ड्राइव को चालूकरता है। रि वर्स थ्रेशोल्ड स्वि च ड्राइव को
बंद कर देता है। सेंसर-2 के बजाय, हाथ की रि वर्स मूवमेंट के लि ए एक शॉर्ट-स्ट्रोक स्प्रि ंग है
डुअल-सेंसर नि यंत्रण: हाथ के फ्लेक्सन और एक्सटेंशन सेंसर के बलों मेंअंतर की सीमा सेअधि क होनेपर
ड्राइव चालूहो जाता है। रि वर्स थ्रेशोल्ड स्वि च ड्राइव को बंद कर देता है।
टेलीप्रेजेंस सूट की ड्राइव स्पीड सीधेआनुपाति क है:
1. बल के परि वर्तन की दर
2. बल सेंसर की सीमा सेपरेबल संक्रमण की परि माण
कंपन सुरक्षा: सेंसर जोड़ेका कम बल अंतर - ऑपरेटर द्वारा नि र्धा रि त शेड्यूल के अनुसार कम ड्राइव स्पीड।
मानव मांसपेशि यों का उपयोग करके एक्सोस्केलेटन के हि ंज-लीवर तंत्र एक्सोस्केलेटन के रोटेशन के सभी
अक्षों को मानव जोड़ों के अक्षों सेजोड़तेहैं। टेलीप्रेजेंस सूट में, ड्राइव का टॉर्क केवल व्यक्ति के जोड़ों तक जाता
है। एक्सोस्केलेटन के टि का पर कोई भार नहींहै। इससेजोड़ों पर भार नहींबढ़ता है- एक्सोस्केलेटन फीडबैक
सि ग्नल के अलावा कोई अन्य बल नहींबनाता है।
वजन, एक्सोस्केलेटन की जड़ता के लि ए क्षति पूर्ति प्रणाली
ड्राइव एक्सोस्केलेटन की भुजाओंऔर पैरों मेंकेन्द्रापसारक बल से, भुजाओंऔर पैरों के एक्सोस्केलेटन के
गुरुत्वाकर्षण बल और जड़ता सेव्यक्ति की रक्षा करती है:
1. भुजाओंऔर पैरों के एक्सोस्केलेटन के बल सेंसर सेड्राइव द्वारा शून्य संकेत बनाए रखनेके सि द्धांत पर
आधारि त है। एक्सोस्केलेटन ड्राइव एंड्रॉइड के साथ बल प्रति क्रि या संकेत सेव्यक्ति पर केवल बल लागूकरता
है।
2. ड्राइव एक्सोस्केलेटन की भुजाओंऔर पैरों के गुरुत्वाकर्षण बल की क्षति पूर्ति नि र्णय तालि काओंके अनुसार
करती है"हाथ का कोण (पैर, ऊर्ध्वा धर सेधड़) - केबलों मेंप्रति शत बलों की क्षति पूर्ति ।" ड्राइव पुली-केबलों की
समानांतर ऊपरी शाखाओंको तालि का मेंदि ए गए आंकड़ेके अनुसार पुली-केबलों की नि चली शाखाओंके बल
सेअधि क बल के साथ खींचती हैं।
3. एक्सोस्केलेटन की जड़ता को हाथों और पैरों के एक्सोस्केलेटन मेंत्वरण सेंसर के साथ ड्राइव की प्रति क्रि या
द्वारा मुआवजा दि या जाता है। तालि काओंके अनुसार मुआवजा "त्वरण - ड्राइव केबल पर अति रि क्त प्रति शत
बल"। सेटि ंग्स में, व्यक्ति तालि का संख्या नि र्दि ष्ट करेगा।
4. ड्राइव 3D जि म्बल के साथ एक्सोस्केलेटन के जड़त्व आघूर्ण की भरपाई “व्यक्ति + एक्सोस्केलेटन + 3D
जि म्बल” और बि ना व्यक्ति के जड़त्व आघूर्ण के बीच के अंतर सेकरता है, जो कि एक्सोस्केलेटन के हाथों, पैरों
की स्थि ति - क्लच की वर्तमान शक्ति के अनुसार है। “कोणीय त्वरण - क्लच करंट” तालि काओंसेटॉर्क अंतर
(क्लच की वाइंडि गं , बि जली के लि ए तांबे के तारों मेंवर्तमान शक्ति )
5. एक्सोस्केलेटन के हाथ और पैर के सेंसर मेंजि तना अधि क त्वरण होगा, एक्सोस्केलेटन के बल सेंसर की
कम बल सीमा मेंड्राइव की गति उतनी ही अधि क होगी
6. ड्राइव “केन्द्रापसारक बल - प्रति शत ड्राइव बल जो हाथों और पैरों के एक्सोस्केलेटन मेंकेन्द्रापसारक बल की
भरपाई करता है” तालि काओंके अनुसार केन्द्रापसारक बल की भरपाई करता है
केबल के माध्यम सेहाथों और पैरों के एक्सोस्केलेटन के टि का मेंगुरुत्वाकर्षण सेक्षण को संतुलि त कि या
जाता है गति के लि ए 120% तक स्प्रि ंग। इस 20% की भरपाई ड्राइव द्वारा बल सेंसर का उपयोग करके की
जाती है।
परि शुद्धता + उच्च गति ड्राइव
मानव आंदोलनों के लि ए ड्राइव की संवेदनशीलता कोणीय वेग, कोण बेमेल और बल वृद्धि की दर मेंवृद्धि के
साथ वर्गा कार रूप सेबढ़ती है
1. छोटेबलों की सीमा मेंकम कोणीय गति पर या मि सलि ग्न्मेंट के एक छोटेकोण पर - मानव आंदोलनों के
लि ए ड्राइव की कम संवेदनशीलता। एंड्रॉइड के हाथों और उंगलि यों की छोटी हरकत के लि ए मानव शक्ति मेंबड़े
प्रति शत की वृद्धि के कारण एंड्रॉइड की हरकतेंसटीक होती हैं। एक्सोस्केलेटन के फ्लेक्सर और एक्सटेंसर
ड्राइव का एक बड़ा पारस्परि क प्रति रोध है। एंड्रॉइड के फ्लेक्सर्स और एक्सटेंसर की ड्राइव इसी तरह सेकाम
करती हैं। सेटि ंग्स में, एक व्यक्ति ताकत के आंकड़ेया मि सलि ग्न्मेंट के कोण पर ताकत मेंप्रति शत वृद्धि की
नि र्भरता का एक ग्राफ चुनता है।
2. उच्च कोणीय गति या बड़ेमि सलि ग्न्मेंट कोण पर, ड्राइव मानव आंदोलनों के प्रति अत्यधि क संवेदनशील
होती है। महान शक्ति , एंड्रॉइड प्रदर्शन एक एंड्रॉइड को नि यंत्रि त करतेसमय मानव शक्ति मेंछोटेप्रति शत की
वृद्धि के कारण। एक्सोस्केलेटन के फ्लेक्सर्स और एक्सटेंसर की ड्राइव कम एंटीफ़ेज़ मेंकाम करती हैं।
3. बल वृद्धि की उच्च दर या उच्च शक्ति पर, ड्राइव मानव आंदोलनों के प्रति अत्यधि क संवेदनशील है। महान
शक्ति , एंड्रॉइड प्रदर्शन एक एंड्रॉइड को नि यंत्रि त करतेसमय मानव शक्ति मेंछोटेप्रति शत की वृद्धि के
कारण। एक्सोस्केलेटन के फ्लेक्सर्स और एक्सटेंसर की ड्राइव कम एंटीफ़ेज़ मेंकाम करती हैं।
4. पेशेऔर तकनीकी संचालन द्वारा मानव आंदोलनों के लि ए ड्राइव की संवेदनशीलता के लि ए एल्गोरि दम की
एक व्यक्ति की पसंद। आप अपनी व्यक्ति गत सेटि ंग्स मेंएल्गोरि दम को समायोजि त कर सकतेहैं।
ड्राइव गेन का गुणांक: ऊपर की ओर गेन क्षैति ज गेन सेअधि क होता है। एंड्रॉइड द्वारा उठाए जा सकनेवाले
अधि कतम वजन की सीमा पर गेन मेंतेजी सेवृद्धि । ऑपरेटर सेसि ग्नल की अनुपस्थि ति में, एंड्रॉइड के हाथों
और उंगलि यों की स्थि ति को अधि कतम गेन के साथ इसके ड्राइव द्वारा समर्थि त कि या जाता है।
प्रगति शील सुदृढीकरण सटीक रूप सेछोटेबल को वि तरि त करता है, भारी भार उठाएगा।
एंड्रॉइड 4 कि लोग्राम तक उठाता है- सुदृढ़ीकरण-1
दसि यों कि लोग्राम उठाता है- 2-5 लंबवत रूप सेसुदृढ़ीकरण
हाथ के फ्लेक्सर-एक्सटेंसर की क्रि या की दि शा मेंक्षैति ज रूप से1,1
बाहरी हाथ की तरफ़ की गति मेंक्षैति ज रूप से1,3।
क्षैति ज लोड ब्रेकि ंग गेन त्वरण सेदोगुना है। नीचेकी ओर जानेवालेलोड का ब्रेकि ंग बल ऊपर की ओर जाने
वालेलोड से3 गुना अधि क है। अधि क वजन - अधि क मजबूती - एंड्रॉइड मि साइलों को जोड़कर ड्रोन को
नुकसान नहींपहुंचाएगा।
ऑपरेटर के लि ए एल्गोरि दम वि कल्प:
1. एल्गोरि दम "ऑपरेटर द्वारा प्रेषि त अधि क त्वरण - बाहरी वातावरण सेकम गुणांक बल लाभ" (संख्याओं
का मानवीय वि कल्प)
2. एल्गोरि दम "ऑपरेटर द्वारा प्रेषि त अधि क गति - बाहरी वातावरण सेकम गुणांक बल लाभ" (संख्याओंका
मानवीय वि कल्प)
3. एल्गोरि दम "ऑपरेटर और बाहरी वातावरण के बल एक ही दि शा मेंनि र्देशि त होतेहैं- बाहरी वातावरण का
बल जि तना अधि क होगा, उसका लाभ गुणांक उतना ही कम होगा" (संख्याओंका मानवीय वि कल्प)
डि फ़ॉल्ट रूप से(मानव सेटि ंग्स), दोनों दि शाओंमेंअनामि का उंगली का गुणांक लाभ बाकी उंगलि यों की तुलना
में50% अधि क है: टेलीप्रेजेंस सूट मेंकोई छोटी उंगली नहींहै।
एंड्रॉइड कंट्रोल डि ले टेलीप्रेजेंस सूट ड्राइव के डि लेसमय के बराबर हैजब कोई मानव एंड्रॉइड को सि ग्नल भेजता
है+ सि ग्नल को संचार लाइन पर एंड्रॉइड तक पहुंचानेका समय + एंड्रॉइड ड्राइव द्वारा मानव सि ग्नल को
प्रोसेस करनेका डि लेसमय + एंड्रॉइड सेमानव तक संचार लाइन के साथ पूर्ण मूवमेंट के बारेमेंसि ग्नल को
ट्रांसमि ट करनेका समय + एंड्रॉइड सेसि ग्नल को टेलीप्रेजेंस सूट ड्राइव द्वारा प्रोसेस करनेका डि लेसमय।
एंड्रॉइड कंट्रोल डि ले एक दि शा मेंसि ग्नल ट्रांसमि शन के समय के दोगुने+ टेलीप्रेजेंस सूट ड्राइव के ऑपरेटि ंग
समय के दोगुने+ एंड्रॉइड ड्राइव द्वारा सि ग्नल प्रोसेसि गं के समय के बराबर है।
0,02 सेकंड जापानी एंड्रॉइड असि मो के हाई-स्पीड इलेक्ट्रि क ड्राइव मेंमैग्नेटोरि योलॉजि कल क्लच को नि यंत्रि त
करनेमेंलगनेवाला डि लेहै। टेलीप्रेजेंस सूट सेएंड्रॉइड तक 6000 कि मी की दूरी पर, लेजर सि ग्नल (रेडि यो
सि ग्नल) फीडबैक के दो-समय के पारि त होनेका कुल समय 0,04 सेकंड + टेलीप्रेजेंस सूट ड्राइव की दो देरी
0,02 सेकंड प्रत्येक + एंड्रॉइड ड्राइव की 0,02 सेकंड की देरी है।
कुल मि लाकर, एंड्रॉइड नि यंत्रण का कुल वि लंब समय 6000 कि मी की दूरी पर 0,1 सेकंड है। मानव मस्ति ष्क
की प्रति क्रि या ~ 0,1 सेकंड - 10 हर्ट्ज है, मस्ति ष्क की ताकत के आनुपाति क जैव-सेंसर के सर्वेक्षण की औसत
आवृत्ति (मस्ति ष्क की अल्फा लय), मानव मांसपेशि यों का वि स्तार।
सि ग्नल बाधि त होता है, नि यंत्रण मेंदेरी की संभावना है - व्यक्ति "पूर्वा नुमान" मोड चालूकरेगा - कोणीय वेग
और बल वृद्धि की दर को बदलकर, बाहों और पैरों के प्रक्षेपवक्र के साथ, सॉफ्टवेयर एंड्रॉइड ड्राइव को आगे
बढ़ाता है, टेलीप्रेजेंस सूट। सेटि ंग्स में, व्यक्ति संख्या और पूर्वा नुमान एल्गोरि दम नि र्दि ष्ट करेगा।
लोच तालि का के अनुसार, सॉफ्टवेयर ड्राइव केबल को सि ग्नल की तुलना मेंकई गुना अधि क मजबूती से
खींचता है, फि र हि लता नहींहै- केबल अपनी लम्बाई के लोचदार छोटा होनेसेहि लता है- नि यंत्रण वि लंब और
बैकलैश और लोचदार वि कृति यों सेहस्तक्षेप कम हो जाता है।
एंड्रॉइड की पारस्परि क गति की - मानव
कोणीय प्रति क्रि या संकेत प्रति शत के रूप मेंहोतेहैं: 100% मानक शून्य के साथ मैनि पुलेटर के कोणों की
मानक सीमा है, मनिै पलु ेटर स्ट्रोक के अतिं म बि दं ।ु समस्या गायब हो जाती है - हाथ का एक्सोस्के लेटन परू ी
तरह सेसीधा हो जाता है, एंड्रॉइड हाथ नहीं।
सॉफ्टवेयर एक्सोस्केलेटन के हाथों और पैरों के प्रति शत कोणों को एंड्रॉइड के हाथों और पैरों के प्रति शत कोणों
मेंसमायोजि त करनेके लि ए तालि काओंका उपयोग करता है। तालि काओंमेंटेलीप्रेजेंस सूट के समन्वय
प्रणाली के लंबवत और क्षैति ज रूप से2 मि मी की पि च होती है। तालि काएँप्रति क्रि या संकेत को समायोजि त
करती हैं। कोई व्यक्ति अपनी व्यक्ति गत सेटि ंग मेंतालि काओंको परि ष्कृत कर सकता है।
सॉफ्टवेयर मानव हाथों (पैरों) के समन्वय आधारों को एंड्रॉइड के हाथों (पैरों) के समन्वय आधारों मेंइस
सि द्धांत के अनुसार समायोजि त करता है: एंड्रॉइड के हाथ (पैर) मानव के हाथों (पैरों) सेएक पल पहलेस्पर्श
करतेहैं। कि सी व्यक्ति के क्षण का मान उंगलि यों (सैपर, सर्जन), हाथों, पैरों के लि ए अलग-अलग सेट कि या
जाता है।
हाथों, पैरों के एक्सोस्केलेटन के कोणों का अंशांकन
टेलीप्रेजेंस सूट के हाथों (पैरों) के एक्सोस्केलेटन के कोणों के सेंसर एलईडी दूरी सेंसर की नकल करतेहैं। हाथों
(परै ों) के एक्सोस्के लेटन के मख्ु य माप बि दं ओु ं के कोण, नि र्देशांक - हाथों और परै ों के एक्सोस्के लेटन के
फोटोसेल के लि ए एलईडी के पराबैंगनी पल्स की उड़ान के समय के अनुसार। फोटोसेल मेंहस्तक्षेप के खि लाफ
ऑप्टि कल फि ल्टर होतेहैं। एलईडी मेंएक स्वचालि त चमक नि यंत्रण होता है।
एलईडी के नि र्देशांक 3 स्पेस वालेफोटोसेल तक पल्स की उड़ान के समय के अनुसार होतेहैं, एलईडी द्वारा
पल्स उत्सर्जि त करनेमेंदेरी को घटाकर, फोटोसेल द्वारा पल्स प्राप्त करनेमेंदेरी को घटाकर।
पराबैंगनी (उनमेंकोई हस्तक्षेप नहींहोता) दूरी सेंसर "केबल तनाव बल - केबल आंदोलन - हाथ (पैर) कोण",
बाहों (पैरों) के एक्सोस्के लेटन के माप बि दं ओु ं के नि र्देशांक की तालि काओं को कै लि ब्रेट करते हैं। पल्स उत्सर्जि त
करनेवालेपराबैंगनी एलईडी हाथों और पैरों के एक्सोस्केलेटन के जोड़ों मेंमौजूद होतेहैं।
2 सौर सेल धड़ एक्सोस्केलेटन के दाईं ओर, बेल्ट के सामनेबाईं ओर, कोहनी के ऊपरी काज के नीचे। 2 सौर
सेल धड़ एक्सोस्केलेटन के दाईं ओर, बेल्ट के पीछे बाईं ओर, कोहनी ड्राइव एक्सोस्केलेटन के ऊपरी काज के
नीचे।
2 सौर सेल धड़ एक्सोस्केलेटन के दाईं ओर, बाएंकंधेड्राइव एक्सोस्केलेटन मेंसामने। दाईं जांघ के
एक्सोस्केलेटन में, ऊपर सेदाईं ओर की तरफ, 2 पराबैंगनी एलईडी सामनेहैं, पीछे धड़ एक्सोस्केलेटन बेल्ट के
दाएंसौर सेल के लि ए।
दाएंकूल्हेके एक्सोस्केलेटन मेंसामने, नीचेदाईं ओर से, धड़ एक्सोस्केलेटन के सामनेकमर फोटोसेल के
लि ए एक पराबगैं नी एलईडी है। दाएं पि डं ली के एक्सोस्के लेटन में, नीचे दाईं ओर से, धड़ एक्सोस्के लेटन के दाएं
कमर फोटोसेल के लि ए एक पराबैंगनी एलईडी है।
दाहि ने परै के एक्सोस्के लेटन के अगं ठू े में, दाईं ओर, पि डं ली एक्सोस्के लेटन के दाईं ओर एक फोटोसेल के लि ए
एक पराबैंगनी एलईडी है। पराबैंगनी एलईडी उच्च आवृत्ति के साथ बारी-बारी सेएक पल्स उत्सर्जि त करतेहैं।
उंगलि यों पर कोई एलईडी दूरी सेंसर नहींहैं, केवल कोण सेंसर हैं। उंगलि यों के पहलेफालंज के कोणों को
चबंु कीय सि र द्वारा पहले फालानक्स को घमु ाकर मापा जाता है। कर्षण मेंएक चबंु कीय डि जि टल ट्रैक होता है।
8 लगातार क्लीयरेंस वाला चबंु कीय सि र कर्षण से कोणीय कोड पढ़ता है। एक चर आवत्तिृ चबंु कीयकरण धारा
के साथ, चबंु कीय सि र एक गति हीन कर्षण से भी कोण कोड पढ़ता है।
हाथ की उंगलि यों के नि र्देशांक (हथेली की समन्वय प्रणाली) उंगलि यों के हथेली के जोड़ों से, हथेली के पि छले
तल सेबंधेहोतेहैं।
आर्म एक्सोस्केलेटन
आर्म एक्सोस्केलेटन बांह के कि नारेपर होता है। इसमेंएक ड्राइव एक्सोस्केलेटन और एक
सेंसर एक्सोस्केलेटन होता है।
ड्राइव एक्सोस्केलेटन धड़ के क्लैम्पि ंग फ्रेम सेजुड़ा होता हैऔर इसमेंग्रुप ड्राइव मॉड्यूल सेआनेवाली केबल
के साथ पुली होती है। एक्सोस्केलेटन के वजन और जड़त्व क्षति पूर्ति प्रणाली सेजुड़ा होता है। ड्राइव
एक्सोस्केलेटन साइड हि ंगेड लीवर के माध्यम सेसभी ड्राइव बलों को सेंसर एक्सोस्केलेटन मेंस्थानांतरि त
करता है। ड्राइव एक्सोस्केलेटन मेंकोई लंबाई समायोजन नहींहै। यह सेंसर एक्सोस्केलेटन सेलंबा है।
सेंसर एक्सोस्केलेटन मानव भुजा और ड्राइव एक्सोस्केलेटन के बीच होता है, इसमेंबल और कोण सेंसर होते
हैं, यह ट्रंक/धड़ के क्लैम्पि ंग फ्रेम से3D हि ंज द्वारा जुड़ा होता है, इसमेंआर्म क्लैम्प होतेहैं। सेंसर
एक्सोस्केलेटन स्क्रू ड्राइव के साथ बल सेंसर की संख्या का उपयोग करके अग्रभाग, कोहनी, हाथ, कंधेकी
चौड़ाई और ट्रंक के क्लैम्पि ंग फ्रेम की लंबाई नि र्धा रि त करता है। बल सेंसर को वोटि ंग एल्गोरि दम के साथ 3
बार दोहराया जाता है।
ड्राइव एक्सोस्केलेटन और सेंसर एक्सोस्केलेटन कलाई के माध्यम सेएक कठोर ट्यूब-अक्ष-1 द्वारा जुड़ेहोते
हैं। अक्ष-1 सेंसर एक्सोस्केलेटन की कोहनी के नि चलेहि स्सेसेकठोरता सेजुड़ा हुआ है। प्रारंभि क स्थि ति में
अक्ष-1 क्षैति ज है, जो व्यक्ति सेबग़ल मेंनि र्देशि त है। अक्ष-1 आंतरि क अक्ष है- एक कठोर ट्यूब 15 सेमी
लंबी, 2,5 सेमी व्यास की।
बाहरी ट्यूब-1-2 अक्ष-1 ड्राइव एक्सोस्केलेटन की कोहनी के नि चलेहि स्सेसेकठोरता सेजुड़ेहुए हैं। अक्ष-1
ट्यूब-1 (व्यक्ति के करीब), ट्यूब-2 के अंदर घूमता है।
ट्यूब-1 और अक्ष-1 के बीच, हाथ के एक्सोस्केलेटन की उंगलि यों और हथेली के केबल ड्राइव के पुली की
स्लाइडि गं बेयरि गं ट्यबू घमू ती हैं। सभी एक्सल और ट्यबू सादे बेयरि गं हैं।
ड्राइव एक्सोस्केलेटन की कोहनी, सेंसर एक्सोस्केलेटन की कोहनी मेंएक पारस्परि क स्वतंत्रता की डि ग्री होती
है, जो औसत व्यक्ति की ताकत से4 गुना अधि क नि रंतर भार के लि ए डि ज़ाइन की जाती है।
सेंसर एक्सोस्केलेटन हाथ और कोहनी की सभी हरकतों को ड्राइव एक्सोस्केलेटन तक कठोरता सेपहुंचाता है।
कोहनी की अनुदैर्ध्य गति , सेंसर एक्सोस्केलेटन की अग्रबाहुकी हरकतेंड्राइव एक्सोस्केलेटन की कोहनी और
अग्रबाहुकी हरकतों सेभि न्न होती हैं। एक व्यक्ति इसेमहसूस नहींकरता है, क्योंकि :
1. फीडबैक केवल सेंसर एक्सोस्केलेटन सेआता है
2. एंड्रॉइड हाथ सेफीडबैक के बि ना कोहनी और अग्रबाहुकी स्वतंत्रता की कोई डि ग्री नहींहै।
टेलीप्रेजेंस सूट मोड: कॉम्पैक्ट, स्टार्टर, वर्किं ग। कॉम्पैक्ट मोड - कमरेमेंन्यूनतम वॉल्यूम। स्टार्टिं ग मोड -
कि सी व्यक्ति को प्राप्त करनेके लि ए तैयार।
टेलीप्रेजेंस सूट ऑपरेटर की शुरुआती स्थि ति
आदमी कू ल्हों के क्लम्पिै गं फ्रे म पर बठै ता है। वे कू ल्हों और पि डं लि यों के क्लम्पिै गं फ्रे म की लबं ाई नि र्धा रि त
करनेके लि ए बल सेंसर ड्राइव का उपयोग करतेहैं। पीठ लंबवत है। कोहनी और अग्रभागों के क्लैम्पि ंग फ्रेम की
लंबाई जोड़ों के साथ नि र्धा रि त करनेके लि ए बाहों और पैरों के जोड़ों को 90° के कोण पर लंबवत मोड़ा जाता है।
दाएंएक्सोस्केलेटन-दस्ताने(एक्सो-दस्ताने) की शुरुआती स्थि ति में, हथेली के क्लैम्पि ंग फ्रेम की नि चली
प्लेट एक्सो-दस्तानेके नीचेस्थि त होती हैऔर कोहनी के अनुदैर्ध्य अक्ष से45° के कोण पर बाईं ओर घुमाई
जाती है। फि ंगर एक्सोस्केलेटन-1-2-3 वेक्षैति ज रूप सेसमान रूप सेलम्बी होती हैं, एक ही ऊर्ध्वा धर तल में
स्थि त होती हैं। अंगूठे का एक्सोस्केलेटन एक्सो-दस्तानेकी ऊपरी प्लेट मेंस्थि त होता है।
उंगली-1 तर्जनी है।
उंगली-2 मध्यमा है।
उंगली-3 अनामि का है।
उंगली एक्सोस्केलेटन-1-2-3 दाहि नी हथेली के क्लैम्पि ंग फ्रेम के तल के बाईं ओर 64° के कोण पर मुड़ी हुई है।
अंगूठे के फैलेहुए एक्सोस्केलेटन की अनुदैर्ध्य धुरी शेष उंगलि यों के फैलेहुए आगेके एक्सोस्केलेटन की
अनुदैर्ध्य अक्षों के समानांतर है।
एक व्यक्ति एक्सो-दस्तानेमेंब्रश डालता है। एक्सो-दस्ताना उंगलि यों के फ्लेक्सर्स और एक्सटेंसर के सभी
पावर फ़ंक्शन करता है।
THE DESIGN OF THE EXO-GLOVE
एक्सो-ग्लव का डि ज़ाइन
उंगलि यों के मुड़ेहुए मूल जोड़ (हथेली सेपहली उंगली के जोड़)-1-2-3 एक व्यक्ति हथेली के क्लपिैं गं फ्रे म की
ऊपरी प्लेट के सामनेके कि नारेमेंबल सेंसर दबाता है। इन बल सेंसर के आंकड़ों के अनुसार, ड्राइव उंगलि यों के
मूल जोड़ों (हथेली सेपहली उंगली के जोड़)-1-2-3 और हथेली के एक्सोस्केलेटन के बीच की दूरी को शून्य कर
देता है। ड्राइव फि र उंगलि यों की लंबाई को थि म्बल पावर के लंबे-स्ट्रोक स्प्रि ंग-लोडेड आनुपाति क बल सेंसर के
संकेत पर कम कर देता है।
उंगलि यों के अन्य फालंगों मेंक्लैम्पि ंग फ्रेम नहींहोतेहैं। उन्हेंमेरेद्वारा आवि ष्कृत तंत्र द्वारा प्रति स्थापि त
कि या जाता है। थंबल्स, थंबल के बल सेंसर-Z (उंगली की नोक पर कार्य करनेवालेबल को मापता है) के
लंबे-स्ट्रोक स्प्रि ंग्स के गाइड के साथ आगेबढ़तेहुए उंगलि यों की लंबाई को समायोजि त करतेहैं। सेंसर-Z में
बल स्थि र है: सेंसर-Z ड्राइव सेंसर-Z बल की ऊपरी या नि चली सीमा सेपरेसंक्रमण को चालूकरता है, रि वर्स
संक्रमण बंद हो जाता है।
कोई पि कं ी एक्सोस्के लेटन नहीं हैं। एक्सो-ग्लव में, दो ट्रैक्शन प्रत्येक उंगली के अतिं म दो फालगं ों को
मोड़ते-उतारतेहैं+ दो ट्रैक्शन हथेली सेउंगली के पहलेफालंग को मोड़ते-उतारतेहैं। एक्सो-ग्लव मेंधीमी ड्राइव
उंगलि यों को दाएंऔर बाएंघुमाती हैं।
तर्जनी और अनामि का उंगलि यांमध्यमा उंगली सेएक साथ बग़ल मेंजा सकती हैंऔर वापस लौट सकती हैं।
एक्सो-ग्लव की उंगलि यों की कोई अन्य पार्श्व गति नहींहै। इससेएक्सो-ग्लव की उंगलि यों पर केबल की
संख्या कम हो जाती है; अवतार कि सी भी उपकरण के साथ काम कर सकता है।
प्रति क्रि या संकेत, कलाई के आधार पर 3डी जि म्बल (पावर केबल के लि ए पुली के साथ) की कुल्हाड़ि यों के अंदर
3 घूर्णन ट्रांसफार्मर के माध्यम सेएक्सो-लव को ऊर्जा की आपूर्ति । या हथेली के एक्सोस्केलेटन के 3डी
जि म्बल की कु ल्हाड़ि यों के अदं र फ्लटै समाक्षीय के बल द्वारा, एक सर्पि ल मेंकंु डलि त।
उंगलि यों के पहलेफालैंग्स के आधार पर-1-2-3 - उंगली के दाएंऔर बाएंतरफ के बल सेंसर। अपनी उंगलि यों
को दाएंएक्सो-ग्लव मेंडालकर, व्यक्ति अपनी उंगलि यों-1-2-3 सेउंगली के दाएंया बाएंतरफ के बल सेंसर
पर दबाव डालता है।
बल सेंसर के संकेतों के अनुसार, एक्सो-ग्लव की ड्राइव उंगलि यों के बीच की दूरी को बदलती हैं, हथेली के
क्लैम्पि ंग फ्रेम की चौड़ाई को बदलती हैं। इसी तरह की ड्राइव एक्सोस्केलेटन को केवल व्यक्ति के आकार के
अनुसार समायोजि त करती हैं, एक्सोस्केलेटन के आगेके संचालन मेंभाग लि ए बि ना।
नि चली प्लेट मेंतर्जनी के कि नारेपर 90 ° के कोण पर एक मोड़-1 है। मोड़-1 - पार्श्व हथेली का समर्थन।
समानांतर चतुर्भुज काज तंत्र-1 एक स्क्रू ड्राइव के साथ नि चली प्लेट को हथेली के पीछे दबाता हैऔर मोड़-1
तर्जनी की हथेली की तरफ़ बग़ल में, उनके स्ट्रोक की लंबाई मेंअंतर की परवाह कि ए बि ना।
हथेली के एक्सोस्केलेटन की नि चली प्लेट मेंअंगूठे का कटआउट है।
स्क्रू ड्राइव-1, लीवर तंत्र द्वारा 3 कर्षण को आगेबढ़ातेहुए, उंगलि यों के एक्सोस्केलेटन की चौड़ाई-1-2-3
नि र्धा रि त करता है। स्क्रू ड्राइव-2 हथेली के एक्सोस्केलेटन की नि चली और ऊपरी प्लेटों के सामनेके समर्थन
को गाइड के साथ लेजाता है, जि ससेउंगलि यों-1-2-3 के बीच की दूरी कम हो जाती है।
स्क्रू ड्राइव-3 लीवर तंत्र उंगलि यों को ऊपर-1-2-3 सेजकड़ता है। उंगली के क्लैंप को बल सेंसर द्वारा सीमि त
बल के साथ क्लैंप कि या जाता है।
दाहि नी हथेली के एक्सोस्केलेटन की नि चली प्लेट में4 हथेली के सहारेहोतेहैं। सपोर्ट-N3 उंगली-3
एक्सोस्केलेटन का मार्गदर्शक है। सपोर्ट-N2 उंगली-2 एक्सोस्केलेटन का मार्गदर्शक है। सपोर्ट-N1 उंगली-1 के
एक्सोस्केलेटन का मार्गदर्शक है।
एक आयताकार गाइड और एक स्क्रू (स्क्रू ड्राइव-2) हथेली के आर-पार सपोर्ट-N1-N2-N3 सेहोकर गुजरता है,
जो उंगलि यों के बीच की दूरी को कम करता है। सपोर्ट-N1-N2 में, स्क्रू मेंएक अलग थ्रेड पि च होती है, ताकि
जब उंगलि यों के एक्सोस्केलेटन के बीच की दूरी कम हो जाए, तो उनके बीच एक ही दूरी बनी रहे।
सपोर्ट-N4 हथेली के पि छलेहि स्सेका सहारा है। सपोर्ट-N4 मेंएक आयताकार गाइड हैजो इसेसपोर्ट-N3 से
जोड़ता है। स्क्रू ड्राइव-4, सपोर्ट-N4 को सपोर्ट-N3 के आयताकार गाइड के साथ घुमातेहुए, हथेली के
एक्सोस्केलेटन की लंबाई को कम करता है। हथेली के एक्सोस्केलेटन की ऊपरी प्लेट मेंहथेली के पि छले
हि स्सेका एक समान डि ज़ाइन।
दाहि नी हथेली के एक्सोस्केलेटन की ऊपरी प्लेट में4 हथेली के सहारेहोतेहैं। सपोर्ट-V3 उंगली के मार्गदर्शक
हैं—3 एक्सोस्केलेटन। सपोर्ट-V2 उंगली के मार्गदर्शक हैं—2 एक्सोस्केलेटन। सपोर्ट-V1 उंगली के मार्गदर्शक
हैं—1 एक्सोस्केलेटन। एक आयताकार गाइड और एक स्क्रू (स्क्रू ड्राइव-2) हथेली के आर-पार
सपोर्ट-V1-V2-V3 सेहोकर गुजरतेहैं, जो उंगलि यों के बीच की दूरी को कम करतेहैं।
हथेली के क्लैम्पि ंग फ्रेम की ऊपरी प्लेट के सामनेके कि नारेमेंबल सेंसर की आकृति के अनुसार, ड्राइव नि चले
कोहनी जोड़ के साथ हथेली के क्लैम्पि ंग फ्रेम की लंबाई और मुड़ी हुई कोहनी के क्लैम्पि ंग फ्रेम की लंबाई
नि र्धा रि त करता है। क्लैम्पि ंग फ्रेम के एक्ट्यूएटर ऊपरी जोड़ पर हथेली और कोहनी को जकड़तेहैं।
हथेली के क्लैम्पि ंग फ्रेम की ऊपरी प्लेट के सामनेके कि नारेमेंबल सेंसर अंक सेंसर के अनुसार, ड्राइव नि चले
कोहनी जोड़ के साथ हथेली के क्लैम्पि ंग फ्रेम की लंबाई और मुड़ी हुई कोहनी के क्लैम्पि ंग फ्रेम की लंबाई
नि र्धा रि त करता है। क्लैम्पि ंग फ्रेम के एक्ट्यूएटर ऊपरी जोड़ पर हथेली और कोहनी को जकड़तेहैं।
सेंसर एक्सोस्केलेटन और फोरआर्म के क्लैम्पि ंग फ्रेम के अनुदैर्ध्य अक्ष हमेशा समानांतर नहींहोतेहैं।
इसलि ए, फोरआर्म के क्लैम्पि ंग फ्रेम को अति रि क्त अक्ष-डी में4° तक के कोण पर घुमाया जा सकता है।
प्रारंभि क स्थि ति में,-डी अक्ष सेंसर एक्सोस्केलेटन के फोरआर्म के अनुदैर्ध्य अक्ष के लि ए अनुदैर्ध्य रूप से
लंबवत स्थि त है।
ड्राइव अंगूठे के एक्सोस्केलेटन को 90° के अनुप्रस्थ कोण पर, हथेली के तल पर 64° के अनुदैर्ध्य कोण पर
मोड़ता है।
मानव अंगूठे का मूल जोड़ हथेली के क्लैम्पि ंग फ्रेम की ऊपरी प्लेट के बल सेंसर को दबाता है। बल सेंसर हथेली
के एक्सोस्केलेटन की लंबाई नि र्धा रि त करता है।
स्क्रू ड्राइव हथेली को हथेली के एक्सोस्केलेटन की ऊपरी और नि चली प्लेटों सेजकड़ती है।
हथेली के एक्सोस्केलेटन की ऊपरी प्लेट पर मानव कलाई के ऊपर तीन अक्षों मेंपुली के साथ एक 3D-कार्डन
है। कंधेके ऊपर सेएक समूह ड्राइव के 12 पावर केबल पुली के माध्यम सेप्रत्येक एक्सो-ग्लव मेंजातेहैं।
हाई-स्पीड ट्रैक प्रत्येक उंगली में20 कि लोग्राम की ताकत देतेहैं। एक्सो-ग्लव के अंदर पार्श्व उंगली आंदोलनों
के लि ए कम-शक्ति ड्राइव हैं।
एक्सो-ग्लव का डि ज़ाइन कि सी भी दि शा में60 कि लोग्राम के बल पर लोचदार वि कृति यों के बि ना कठोर है।
कठोरता के बि ना, कोई सटीक कोणीय प्रति क्रि या + हैप्टि क प्रति क्रि या का हस्तक्षेप नहींहै।
हथेली के एक्सोस्केलेटन के मध्य सेलगभग ऊपर, इसके क्षैति ज तल के समानांतर, उंगलि यों के पावर केबल
के ड्राइव के पुली के साथ शाफ्ट-1 सेहोकर गुजरता है। पुली सेकेबल तंत्र के माध्यम सेउंगलि यों के
एक्सोस्केलेटन मेंजातेहैं। स्थि र शाफ्ट-1 एक्सो-दस्तानेकी ऊपरी प्लेट सेजुड़ा हुआ है।
हाथ के क्लैम्पि ंग फ्रेम में, शाफ्ट-1 को 3D-कार्डन के माध्यम सेकोहनी के क्लैम्पि ंग फ्रेम सेतीन अक्षों में
उंगली की पावर केबल के लि ए जोड़ा जाता है। 3D-कार्डन हथेली के एक्सोस्केलेटन को स्वतंत्रता की सभी डि ग्री
देता है।
हाथ का 3D-कार्डन: जब एक अक्ष को 90° के कोण पर घुमाया जाता है, तो हाथ के 3D-कार्डन की एक डि ग्री
स्वतंत्रता खो जाती है। खोनेसेबचनेके लि ए, 3D-कार्डन की दो अक्षों को संचालन मेंएक साथ न आनेदें।
3D-कार्डन जि म्बल ड्राइव के साथ "कोण-L1 - कोण-L2 - कोण-L3" तालि का जि म्बल अक्षों के बीच एक
नि रंतर 45°
कोण अंतर बनाए रखती है।
कोण-L1 ब्रश के सबसेकरीब 3D-कार्डन की धुरी का घूर्णन कोण है।
कोण-L2 ब्रश से3D-कार्डन की दूसरी धुरी का घूर्णन कोण है।
कोण-L3 कलाई से3D-कार्डन की तीसरी धुरी के घूमनेका कोण है।
थ्रस्ट-1 हाथ के एक्सोस्केलेटन को कोहनी के ऊपरी हि स्सेके क्लैम्पि ंग फ्रेम सेजोड़ता है, साथ मेंस्प्रि ंग
मैकेनि ज्म, कि सी भी हरकत मेंउनके बीच समान दूरी देता है। थ्रस्ट-2 द्वारा कोहनी के ऊपरी हि स्सेका
क्लैम्पि ंग फ्रेम ड्राइव एक्सोस्केलेटन की कोहनी के ऊपरी हि स्सेसेजुड़ा हुआ है।
थ्रस्ट-3 फोरआर्म के नि चलेहि स्सेके क्लैम्पि ंग फ्रेम को कंधेपर धड़ के क्लैम्पि ंग फ्रेम सेजोड़ता है, साथ में
स्प्रि ंग मैकेनि ज्म, कि सी भी हरकत मेंउनके बीच समान दूरी सुनि श्चि त करता है।
थ्रस्ट-4 द्वारा फोरआर्म के नि चलेहि स्सेका क्लैम्पि ंग फ्रेम ड्राइव एक्सोस्केलेटन की कोहनी के ऊपरी हि स्सेसे
जुड़ा हुआ है। कोहनी के ऊपरी हि स्सेके क्लैम्पि ंग फ्रेम और फोरआर्म के नि चलेहि स्सेके क्लैम्पि ंग फ्रेम के
बीच कोई सीधा हि ंज कनेक्शन नहींहै। ट्रैक्शन-1-2-3-4 इनमेंव्यक्ति के हाथ के नीचेहाथ के एक्सोस्केलेटन
के क्लैम्पि ंग फ्रेम की लंबाई को समायोजि त करनेके लि ए स्क्रू मैकेनि ज्म होतेहैं।
समान क्लैम्पि ंग के चेन क्लैम्प कलाई की हथेली को दोनों तरफ सेकोण-1-2 पर हथेली के अनुदैर्ध्य अक्ष पर
क्लैंप करतेहैं। प्रत्येक चेन क्लैंप मेंएक रूट हि ंज, दो स्प्रि ंग होतेहैं। प्रारंभि क स्थि ति में, क्लैंप औसत व्यक्ति
की शारीरि क रचना के आंकड़ों के अनुसार कोण-1-2 को पकड़ता है। हि ंज वालेस्प्रि ंग व्यक्ति की हथेली के
कोण-1-2 को समायोजि त करतेहैं।
ड्राइव उंगलि यों की लंबाई और व्यास के अनुसार एक्सो-ग्लव के समायोजन को सुचारू रूप सेनि ष्पादि त करेंगे,
उंगलि यों के बीच की दूरी 2,5 सेकंड मेंहोगी। मध्यमा उंगली के रूट हि ंज की धुरी, हथेली के एक्सोस्केलेटन की
नि चली प्लेट की सतह मेटावर्स के प्रोग्रामर की हथेली समन्वय प्रणाली का आधार है।
वजन कम करने के लि ए, टेलीप्रेजेंस सूट के स्क्रू ड्राइव मेंठोस मि श्र धातुस्टील पाइप सेबनेस्क्रू होतेहैं। पाइप
के धागेको हीरेके घेरेसेकाटा जाता है। धागेको टाइटेनि यम नाइट्राइड सेलेपि त कि या जाता है, तरल तांबेमें
रखा जाता हैऔर अल्ट्रासाउंड सेउपचारि त कि या जाता हैताकि तांबा छि द्रपूर्ण टाइटेनि यम नाइट्राइड फ्रेम में
दरारेंभर दे। फि र हीरेके घेरेसेधागेकी प्रोफ़ाइल को पीसना।
धागा आयताकार या समलम्बाकार होता हैजि समेंधागेके अधि कतम संभव व्यास के साथ दक्षता बढ़ानेके
लि ए धागेके लि फ्ट के कोण को कम करके और धागेकी थ्रस्ट सतह को बढ़ाकर दक्षता बढ़ाई जाती है। धागेकी
थ्रस्ट सतह अधि कतम दक्षता और ड्राइव जीवन के लि ए पेंच की धुरी के बि ल्कुल लंबवत होती है।
परि वर्तनशील मोटाई की एक लोचदार धातुशीट सेबना एक थि म्बल। अर्ध-शंकु के चि कनेहि स्से(नाखून के
ऊपर से) के बीच मेंएक अनुदैर्ध्य कटआउट होता है। नाखून की नोक के क्षेत्र में, थि म्बल उंगली को नहींछूता
है, ताकि उंगली की नोक को रगड़ा न जाए। थि म्बल की द्वि अवतल अर्धवृत्ताकार सतह उंगली के पैड सेसटी
होती है।
थि म्बल के बेलनाकार पि छलेहि स्सेवाला ड्राइव व्यक्ति की उंगली को पार्श्व बल सेंसर की बल सीमा पर जकड़
लेता है।
एक्सो-दस्तानेके क्लैम्पि ंग फ्रेम उच्च-मापांक उच्च-शक्ति मि श्र धातुस्टील सेबनेहोतेहैं, जो बैक्टीरि या के
वि नाश के लि ए चांदी और तांबेके पहनने-प्रति रोधी मि श्र धातुके साथ लेपि त होतेहैं। मि श्र धातुऊष्मीय रूप से
सुचालक हैताकि काम करतेसमय आपके हाथों मेंपसीना न आए।
थि म्बल ड्राइव:
1. सेंसर-एसपी सेंसर-एसपी की संचार लाइन के माध्यम सेएंड्रॉइड का सेंसर-एसपी मानव थि म्बल को उंगली
के एक्सोस्केलेटन सेऊपर लेजाता है(उंगलि यों की नोक की लचीलेपन के अनुसार 4 मि मी तक की लंबाई के
लि ए)।
2. सेंसर-पी एंड्रॉइड उंगली के अनुदैर्ध्य अक्ष के साथ कार्य करनेवालेबल को व्यक्ति तक पहुंचाता है। एंड्रॉइड
सेंसर-पी ड्राइव-पी की मदद सेसंचार लाइन के साथ मानव थि म्बल को उसकी उंगली के अनुदैर्ध्य अक्ष के साथ
हथेली की ओर लेजाता है(उंगली पैड की लचीलेपन के अनुसार लंबाई में4 मि मी तक)
3. सेंसर-बीएस एंड्रॉइड की उंगली पर व्यक्ति को पार्श्व बल पहुंचाता है। सेंसर-बीएस ड्राइव-बीएस के साथ
संचार लाइन के साथ मानव थि म्बल को उंगली के एक्सोस्केलेटन सेबग़ल मेंलेजाता है(उंगली पैड की
लचीलेपन के अनुसार लंबाई में3 मि मी तक)।
स्पर्शनीय थि म्बल मेंउंगली पैड के लि ए स्पर्शनीय पि क्सेल इलेक्ट्रोड का एक मैट्रि क्स होता है, जो एंड्रॉइड की
उंगलि यों की स्पर्शनीय संवेदनाओंको कि सी व्यक्ति तक पहुंचाता है। एंड्रॉइड के स्पर्शनीय पि क्सेल शक्ति ,
तापमान संचारि त करतेहैं।
ड्राइव केबल की संख्या को कम करनेके लि ए, एंड्रॉइड की उंगलि यों को समान क्लपिैं गं की चेन क्लपैं योजना के
अनुसार बनाया जाता है। एंड्रॉइड की उंगलि यों के फालंजेस में, पुली आवश्यक व्यास सेथोड़ी बड़ी होती हैताकि
उंगलि यों का दबाव अन्य फालंजेस की तुलना में2% अधि क मजबूत हो।
नाजुक, कमजोर वस्तुओंके साथ काम करना: एक व्यक्ति बल प्रति क्रि या पर उंगलि यों की स्पर्श प्रति क्रि या को
प्राथमि कता देता है। प्राथमि कता शक्ति सीमा द्वारा सीमि त है।
पेल्टि यर प्रभाव वालेपि क्सेल: टेल्यूरि यम + बि स्मथ को परि वेश के तापमान से72 °C नीचेठंडा कि या जाता
है। कनेक्शन की ध्रुवता को बदलकर, टेल्यूरि यम + बि स्मथ स्पर्श संकेत एक्सोप्लैनेट के स्पर्श ट्रांसमीटर के
स्पर्श पि क्सेल को गर्म या ठंडा करता है।
बल के स्पर्श पि क्सेल का लाभ कारक, तापमान ढाल, स्पर्श माइक्रोफोन के पैरामीटर एक व्यक्ति द्वारा
वर्चुअल टेलीप्रेजेंस सूट नि यंत्रण प्रणाली के वर्चुअल पहि यों का उपयोग करके सेट कि या जाता है। पहि यों में
अलग-अलग व्यास और सतह राहत होती है।
एक्सो-दस्तानेमेंएक्सोस्केलेटन के लि ए एक त्वरि त-रि लीज़ कनेक्शन है। एक्सो-दस्तानेको एक्सोस्केलेटन
सेजोड़तेसमय, उनके केबल स्प्रि ंग-वेज लॉक द्वारा जुड़ेहोतेहैं। काम की सुवि धा के लि ए, व्यक्ति गत एक्सो
दस्तानेहैं, जि समेंसभी आकार एक व्यक्ति के ब्रश के लि ए समायोजि त कि ए जातेहैं। सर्जन और सैपर के
व्यक्ति गत एक्सोप्लैनेट मेंबढ़ेहुए रि ज़ॉल्यूशन के स्पर्श मैट्रि क्स होतेहैं।
एक्सो-ग्लव की स्पर्शनीय, तापमान की स्थि ति
एक्सो-ग्लव की उंगलि यों मेंलगेमल्टी-पि क्सल स्पर्शनीय ट्रांसमीटर कि सी व्यक्ति को एंड्रॉइड की उंगलि यों में
मौजूद कि सी वस्तुका सतही तापमान संचारि त करतेहैं। स्पर्शनीय ट्रांसमीटर के पि क्सल के तापमान
परि वर्तन की दर से, व्यक्ति अलग-अलग तापीय चालकता वाली धातुओंको पहचानता है, कुछ सामग्रि यों को
दूसरों सेअलग करता है। सॉफ़्टवेयर द्वारा मानव स्क्रीन पर सामग्री का नाम प्रदर्शि त कि या जाता है।
सामग्री की तापीय चालकता के आकलन मेंतेज़ी लानेके लि ए, इंस्टॉलेशन मेंमौजूद व्यक्ति तापमान ढाल
लाभ कारक का चयन करता है। तापमान ढाल को बढ़ानेके लि ए, सॉफ़्टवेयर एक्सो-ग्लव के स्पर्शनीय
ट्रांसमीटर की तापमान सीमा को कृत्रि म रूप सेबढ़ा देगा। एक इंसान एंड्रॉइड की उंगलि यों मेंमौजूद सामग्री की
तापीय चालकता का मूल्यांकन मानव उंगलि यों की तुलना मेंतेज़ी सेकरेगा।
एंड्रॉइड की उंगलि यों मेंतापमान सेंसर का एक मल्टी-पि क्सल स्पर्शनीय मैट्रि क्स है। प्रत्येक पि क्सेल का अपना
तापमान सेंसर, पल्स हीटर होता है। सॉफ्टवेयर की तालि काओं(परीक्षण सामग्री) के अनुसार पल्स हीटर
समय-समय पर एक छोटा थर्मल पल्स देता है। पि क्सेल गर्म होता है, जो एंड्रॉइड की उंगलि यों मेंवस्तुकी
सतह पर गर्मी स्थानांतरि त करता है।
एंड्रॉइड की उंगलि यों मेंपि क्सेल के बीच औसत तापमान अंतर इसके सॉफ्टवेयर द्वारा एक्सो-ग्लोव के स्पर्श
ट्रांसमीटर को भेजा जाता है। पेल्टि यर प्रभाव एंड्रॉइड की उंगलि यों मेंपि क्सेल के बीच तापमान अंतर को एक
व्यक्ति तक पहुंचाता है। पि क्सेल कू लि गं दर के अनसु ार, एक व्यक्ति और सॉफ्टवेयर (टेबल) एंड्रॉइड के हाथों
मेंसामग्री की तापीय चालकता नि र्धा रि त करतेहैं।
उस अवधि के अनुसार जब एंड्रॉइड की उंगलि यों का तापमान बदलना बंद हो जाता है, मानव और एंड्रॉइड
सॉफ्टवेयर (टेबल) एंड्रॉइड के हाथों मेंसामग्री की ताप क्षमता नि र्धा रि त करतेहैं। प्लास्टि क और लकड़ी में
उच्च ताप क्षमता होती है।
सेटि ंग्स मेंव्यक्ति एक एल्गोरि थ्म चुनता हैजो दो मोड के बीच स्पर्श संकेत को स्वि च करता है। स्पर्श संकेत
में, तापमान ढाल महत्वपूर्ण आंकड़ा-1 सेअधि क हो गया है- तापमान ढाल प्रवर्धन मोड सक्रि य है।
तापमान प्रवणता महत्वपूर्ण आंकड़े-2 सेकम हो गई है- कि सी व्यक्ति को केवल एंड्रॉइड की उंगलि यों में
सामग्री का वास्तवि क तापमान संचारि त करनेका तरीका चालूहै। संख्याएँ-1-2 एक व्यक्ति द्वारा नि र्धा रि त
की जाती हैं।
खतरनाक तापमान
यदि एंड्रॉइड नेअपनी उंगलि यों मेंबहुत गर्म (बहुत ठंडा) कोई वस्तुउठाई है, तो सॉफ्टवेयर माप की तापमान
सीमा को मानव हाथों के लि ए सामान्य तापमान सीमा सेबदल देगा, एक डि ग्री का पैमाना बदल देगा। मानव
स्क्रीन में, वस्तुका वास्तवि क तापमान एंड्रॉइड की उंगलि यों मेंहै।
स्पर्श पि क्सेल द्वारा कमजोर बलों की सीमा का अनुकरण
स्पर्श पि क्सेल मेंबलों का सटीक संचरण केवल पि क्सेल मेंबल-K के महत्वपूर्ण आंकड़ेसेशुरू होनेवाली
उंगली ड्राइव द्वारा प्रदान कि या जाता हैऔर ऊपर। बलों के संतुलन को बदलनेकी जटि ल प्रक्रि याएँ, 12 उंगली
ड्राइव केबल बल मेंपरजीवी उतार-चढ़ाव देतेहैं। एक्सो-दस्तानेमेंछोटी उंगलि यों की अस्वीकृति सेवेकमजोर
हो गए थे।
सैपर या सर्जन के लि ए कमजोर बलों की सीमा (बल-K सेकम), सॉफ्टवेयर स्पर्श पि क्सेल के कंपन का
अनुकरण करता है। कंपन के आयाम और आवृत्ति को बदलनेके लि ए एल्गोरि थ्म एक व्यक्ति द्वारा चुना
जाता है।
एक एल्गोरि थ्म हैजो कंपन आवृत्ति की रि पोर्ट करता हैन कि ताकत के आंकड़ेकी, बल्कि इसके परि वर्तन की।
जैसे-जैसेलोड बढ़ता है, तेजी सेबढ़ती, सुचारू रूप सेघटती तरंग के साथ पल्स होतेहैं। जब लोड कम होता है,
तो धीरे-धीरेबढ़ती, तेजी सेघटती तरंग के साथ पल्स होतेहैं।
टेलीप्रेजेंस सूट का अ धि कतम स्पर्श (एमटीएस) मानव शरीर पर पहनेजानेवालेस्पर्श ट्रांसमीटर
मैट्रि सेस के साथ स्ट्रेचेबल फैब्रि क सेबना एक स्पर्श सूट है। एमटीएस पूरेमानव शरीर मेंमहीन बारि श
संचारि त कर सकता है, स्पर्श रि सीवर मैट्रि सेस के साथ एक एंड्रॉइड पर गि रता है। या हवा को उसके तापमान के
साथ महसूस करें। एमटीएस टेलीप्रेजेंस सूट मेंपुरुषों, महि लाओंके लि ए रि मोट सेक्स वि कल्पों के बाजार में
होगा।
कि सी व्यक्ति के लि ए, एंड्रॉइड की उंगलि यों द्वारा महसूस की गई सतह की राहत, एक स्पर्शनीय थि म्बल के
स्पर्शनीय पि क्सेल-इलेक्ट्रोड का एक मैट्रि क्स संचारि त करेगा
रि वर्स इलेक्ट्रोवाइब्रेशन:
1. इलेक्ट्रोड का तेजी सेबढ़ता, धीरे-धीरेगि रता हुआ स्पंदनशील वोल्टेज - त्वचा एक उभार की तरह महसूस
होती है
2. धीरे-धीरेबढ़ता, तेजी सेगि रता हुआ स्पंदनशील तनाव - त्वचा अवतलता की तरह महसूस होती है
स्पर्शनीय पि क्सेल-इलेक्ट्रोड का एक मैट्रि क्स वर्तमान पल्स का उपयोग करके और त्वचा पर लागूवोल्टेज की
आवृत्ति को बदलकर सतह की स्थलाकृति का अनुकरण करता है। धातुइलेक्ट्रोड उंगली के पैड को छूता है- यह
तापमान, पावर पि क्सेल का सामान्य इलेक्ट्रोड है: गैल्वेनि क अलगाव के साथ इलेक्ट्रो सर्कि ट। वर्तमान और
वोल्टेज सेटि ंग - मानव द्वारा।
उंगली बल स्थि रीकरण प्रणाली उंगली केबल मेंबलों को बदलनेकी अनुमति नहींदेती हैयदि यह फीडबैक
सि ग्नल मेंनहींहै।
एंड्रॉइड की उंगलि यां
एंड्रॉइड की उंगलि यों पर अलग-अलग डि ग्री की कोमलता, स्पर्शनीय संकल्प और संवेदनशीलता के साथ
स्पर्शनीय थंबल्स को नॉन-स्लि प फि क्सेशन के साथ रखें। एंड्रॉइड अपनेडि ब्बेमेंथंबल्स रखता है, उन्हेंखुद
बदलता है।
वि कल्प-1: लोचदार घर्षण परत वाला थंबल, एक नरम स्पर्शनीय मैट्रि क्स।
वि कल्प 2: घर्षण पायदान वाला एक कठोर मि श्र धातुथंबल, एक ठोस स्पर्शनीय मैट्रि क्स (मेरा आवि ष्कार)।
एंड्रॉइड के थबं ल्स के स्पर्शनीय मट्रिै क्स चबंु कीय या वि द्यतु कनेक्टर द्वारा एक समाक्षीय स्पर्शनीय
प्रति क्रि या केबल सेजुड़ेहोतेहैं। डुप्लि केट चैनल एक पीजोइलेक्ट्रि क मॉड्यूलेटर के माध्यम सेअल्ट्रासाउंड है,
उंगली के साथ एक रॉड या केबल के माध्यम सेएक डि जि टल स्पर्शनीय चैनल ट्रांसमीटर है।
स्पर्शनीय मैट्रि क्स के बि ना थंबल्स मेंवि शेष आकार, कार्य और तंत्र होतेहैं। थंबल्स मेंथंबल की सुपर-हार्ड
संपर्क सतह के साथ अल्ट्रासोनि क ड्राइव हो सकतेहैं, जो सामग्री की अल्ट्रासोनि क वेल्डि ंग और पीसनेका काम
करता है।
एं ड्रॉइड की कलाई ड्राइव का सॉफ्टवेयर, सतह पर पकड़तेया आराम करतेसमय, उंगली सेंसर के बलों के
मूल्यों को बराबर करता है। जब तक कोई व्यक्ति 0,1 सेकंड (मानव सेटि ंग्स) सेअधि क समय तक प्रयास
करके एक अलग उंगली को मजबूत नहींकरता है।
एंड्रॉइड ऑब्जेक्ट को नि चोड़ता है- मानव उंगलि यों के अंगूठे छू गए हैं, एंड्रॉइड की उंगलि यांनहीं- ड्राइव एंड्रॉइड
की उंगलि यों को तब तक हि लाना जारी रखेगा जब तक कि उनमेंबल मानव उंगलि यों की ताकत के बराबर न
हो जाए।
अंतरि क्ष के नि र्देशांक के तीन अक्षों के साथ क्लैम्पि ंग बल को सीमि त करनेका तरीका - जब कोई एंड्रॉइड ब्रश,
पेंसि ल या उपकरण के साथ काम कर रहा होता है, तो वर्चुअल व्हील द्वारा एक व्यक्ति ब्रश, पेंसि ल या
उपकरण को सतह पर दबानेवालेएंड्रॉइड के बल को सीमि त करनेके लि ए सेट करता है।
अधि कतम शक्ति लाभ मोड - जब कोई एंड्रॉइड कि सी उपकरण के साथ काम कर रहा होता है, तो एक व्यक्ति
वर्चुअल व्हील के साथ हाथ पर अधि कतम शक्ति लाभ नि र्धा रि त करता हैजो मानव हाथों पर अंति म शक्ति
मूल्य के X% सेअधि क नहींहोता है। एंड्रॉइड की ड्राइव एंड्रॉइड के हाथों पर X% सेअधि क की शक्ति वृद्धि की
अनुमति नहींदेगी।
शक्ति वृद्धि दर मोड - जब कोई एंड्रॉइड कि सी उपकरण के साथ काम कर रहा होता है, तो एक व्यक्ति वर्चुअल
व्हील के साथ हाथ पर शक्ति वृद्धि दर नि र्धा रि त करता हैजो मानव हाथों पर अंति म शक्ति वृद्धि दर के X%
सेअधि क नहींहोता है। एंड्रॉइड की ड्राइव एंड्रॉइड के हाथों पर X% सेअधि क की शक्ति वृद्धि की अनुमति नहीं
देगी।
एंड्रॉइड का 3डी-वाइब्रेशन सेंसर: एंड्रॉइड की हथेली मेंएक संवेदनशील वाइब्रेशन सेंसर होता है। चैनल-डी के
माध्यम सेएंड्रॉइड की हथेली को फर्श पर रखनेवाला व्यक्ति कंपन और उसके वेक्टर द्वारा नि र्धा रि त करेगा
कि कार का इंजन काम कर रहा हैया नहीं; कार सड़क पर चल रही हैया नहीं, वह कहांजा रही है, लोड के साथ
उसका वजन कि तना है। सॉफ्टवेयर कार के सस्पेंशन के प्रकार, उसके व्हीलबेस की लंबाई और चौड़ाई नि र्धा रि त
करेगा।
एक अलग चैनल-डी के साथ हथेली के एक्सोस्केलेटन के केंद्र म मेंऑपरेटर का 3डी वाइब्रेटर व्यक्ति को एंड्रॉइड
के 3डी वाइब्रेशन सेंसर पर अभि नय करनेवालेकंपन का एक वेक्टर और एक ग्राफ देता है। चैनल-डी एंड्रॉइड
की उंगलि यों के एक व्यक्ति को चैनल देता है। वर्चुअल कंट्रोल सि स्टम वाला व्यक्ति टेलीप्रेजेंस सूट के वर्चुअल
कंट्रोल सि स्टम द्वारा चयनि त दि शा मेंउतार-चढ़ाव को उजागर करेगा। 3डी वाइब्रेटर का कंपन व्यक्ति को
एंड्रॉइड के हाथों मेंलोड का वजन बताएगा: अधि क आवृत्ति का मतलब अधि क वजन है।
कोहनी एक्सोस्केलेटन की लंबाई सेट करना
ड्राइव हथेली के क्लपिैं गं फ्रे म को कोहनी के अनदु ैर्ध्य अक्ष पर 64° के कोण पर मोड़ता है। कोहनी 90° के कोण
पर मड़ु ी हुई है। फोर्स ससें र के चि त्र के अनसु ार, फोरआर्म के नि चले जोड़ के पीछे, ड्राइव कोहनी के क्लपिैं गं फ्रे म
की लंबाई सेट करता है। एक्ट्यूएटर कोहनी को उसके ऊपरी जोड़ पर क्लैंप करता है।
नि चलेकोहनी के जोड़ पर क्लैंप की आवश्यकता नहींहोती है। इसका कार्य हथेली के क्लैंप और हथेली के
3D-कार्डन को नि चले फोरआर्म जोड़ के क्लपिैं गं फ्रे म से जोड़ने वाले पलु द्वारा कि या जाता है।
क्लपिैं गं फ्रे म फोरआर्म को के वल नि चले जोड़ पर क्लपैं करता है। ऊपरी जोड़ पर क्लपैं की आवश्यकता नहीं
होती है। इसका कार्य ससें र एक्सोस्के लेटन के कं धे के जोड़, धड़ के क्लपिैं गं फ्रे म द्वारा कि या जाता है।
फोरआर्म के क्लपिैं गं फ्रे म को ससें र एक्सोस्के लेटन के फोरआर्म के अनदु ैर्ध्य अक्ष के लबं वत अक्ष पर 4° के
कोण पर स्वतंत्र रूप सेघुमाया जा सकता है।
एक्सोस्केलेटन व्यक्ति के हाथ को ऊर्ध्वा धर से45° के कोण पर पीछे खींच सकता है।
टेलीप्रेजेंस सूट की कठोरता "कोकून" तकनीक का उपयोग करके यूनि डायरेक्शनल फाइबर सेबनेभागों द्वारा
दी गई है। कोकून तकनीक बलों की कार्रवाई की रेखाओंके साथ उच्च-मापांक कार्बन फाइबर की एक कठोर
फोम सामग्री सेएक भाग पर घुमावदार है। केबल और केबल के लि ए अंदर छेद के साथ फोम कोकून।
टेलीप्रेजेंस सूट के काम का अंत - व्यक्ति लाल सुरक्षा बटन दबाता है:
1. टेलीप्रेजेंस सूट को बैठने(शुरुआती) स्थि ति मेंतय कि या जाता है
2. क्लि प मुक्त हाथ, पैर
3. गोलाकार 3 डी स्क्रीन को स्प्रि ंग्स द्वारा दूर लेजाया जाता है
टेलीप्रेजेंस सूट सुरक्षा प्रणाली
लाल सुरक्षा बटन 3D-कार्डन, सभी ड्राइव को रोकता है। सुरक्षा मशीन टेलीप्रेजेंस सूट के इंटरनेट और कंप्यूटर
को बंद कर देगी, और 3D-कार्डन को सुरक्षि त स्थि ति मेंरोक देगी। यदि क्लैम्पि ंग फ़्रेम के लंबाई समायोजन
काम नहींकरतेहैं- तो उनके ड्राइव के स्क्रू के दो हि स्सों को अनक्लैम्प करें।
लाल सुरक्षा बटन का वॉयस कंट्रोल। कोई व्यक्ति लाल बटन को चालूकरनेके लि ए जेस्चर सेट कर सकता है।
टि ल्ट-सेंसर वाला सुरक्षा कंप्यूटर हाथों को हेलमेट को छूनेकी अनुमति नहींदेता है। सुरक्षा कंप्यूटर को
इंटरनेट या बाहरी संचार लाइन सेजोड़ना कानून द्वारा हत्या के प्रयास के रूप मेंदंडनीय है।
केबल टूटना - केबल बल सेंसर का एल्गोरि दम टेलीप्रेजेंस सूट के सुरक्षि त स्टॉप मोड को चालूकर देगा, केबल
के दांतदे ार रैखि क कपलि गं को बदं कर देगा। एक रैखि क क्लच दांत-वेज के साथ एक सपाट रॉड है, जि सके
लि ए दोनों तरफ दो दांतेदार बार चि पके रहतेहैं। जब उन्हेंछोड़ा जाता है, तो क्लच बंद हो जाता है- केबल से
जुड़ी रॉड ड्राइव सेबि जली खो देती है। हाथों और पैरों के कोणों के यांत्रि क सीमाओंमेंनीरवता के लि ए एक
प्रगति शील नि लंबन होता है।
टेलीप्रेजेंस सूट की ड्राइव की शक्ति औसत व्यक्ति की तुलना मेंदोगुनी है। राज्य के कानूनों के अनुसार:
1. हाथों और पैरों के कोणों के यांत्रि क प्रति बंधों की एक प्रणाली, जो इंटरनेट और सॉफ़्टवेयर सेअलग है,
अनि वार्य है, जो कि सी व्यक्ति को हैकर्स सेबचाती है
2. एक कार्यशील टेलीप्रेजेंस सूट मेंयांत्रि क सीमाओंकी सेटि ंग को बदलनेकी असंभवता का कार्य अनि वार्य है
3. बि ना लाइसेंस वाली साइट सेटेलीप्रेजेंस सूट के उपयोग का नि षेध (आपराधि क संहि ता का लेख)। लाइसेंस
प्राप्त वेबसाइट पर डुप्लि केट डेटा लॉगर की आवश्यकता होती है(पूरा डेटा सहेजनेमेंवि फलता आपराधि क
संहि ता का एक लेख है)। टेलीप्रेजेंस सूट के सर्वरलेस इंटरनेट नि यंत्रण के लि ए राज्य लाइसेंस।
4. समाज के लि ए जोखि म के स्तर के अनुसार एंड्रॉइड प्रबंधन के लि ए लाइसेंस वर्ग। यह क्षेत्र, दि न के समय
पर नि र्भर करता है
5. सि फर को सि वि ल सेवा मेंस्थानांतरि त करनेके साथ टेलीप्रेजेंस सूट सि ग्नल को एन्क्रि प्ट करना अनि वार्य
है
6. सि वि ल सेवा मेंटेलीप्रेजेंस सूट को तुरंत अक्षम करनेकी क्षमता है।
कोणों के मि सअलाइनमेंट (मि समैच) की सीमा "टेलीप्रेजेंस सूट - एंड्रॉइड" के फीडबैक कोणों को संचारि त करने
की सटीकता है। मानव हाथ (पैर) की गति का त्वरण बढ़ रहा है- एल्गोरि थ्म "हाथ (पैर) की गति - मि समैच
रेंज" की प्रति शत सटीकता को बराबर करता है, हाथ की गति (बल) को संचारि त करनेकी सटीकता को बढ़ाने
के लि ए हाथ के कोण को संचारि त करनेकी सटीकता को कम करता है। कोण मि सअलाइनमेंट की सीमा
कोणीय त्वरण के साथ रैखि क रूप सेबढ़ती है: एक व्यक्ति हाथों और पैरों के लि ए अलग-अलग गैर-रैखि क
ग्राफ़ सेट करेगा।
पि छले2 सेकंड (मानव सेटि ंग्स) मेंएंड्रॉइड के हाथों का कोणीय त्वरण मानव सि ग्नल मेंकोणीय त्वरण की
सीमा से5% अधि क हो गया है- एंड्रॉइड सॉफ़्टवेयर कोण मि सअलाइनमेंट की सीमा को कम कर देगा।
फीडबैक कोणों के मि सअलाइनमेंट की सीमा "टेलीप्रेजेंस सूट - एंड्रॉइड":
1. कोणों के मि सअलाइनमेंट की सीमा जि तनी छोटी होगी - एंड्रॉइड अधि क सटीक, धीमा होगा, फीडबैक
"मानव - एंड्रॉइड" की कठोरता उतनी ही अधि क होगी। कोण मि सअलाइनमेंट सीमा: बल (वि कास दर) और
संतुलन "सटीकता-क्षमता" के परि माण के अनुसार, मोड (सैपर, सर्जन, वेल्डर...) के अनुसार
2. बल फीडबैक की उच्च कठोरता सतहों की कठोरता या कठोरता की भावना को व्यक्त करती है: ब्रेकि ंग
त्वरण की दहलीज से, सॉफ़्टवेयर टेलीप्रेजेंस सूट के कोणों के न्यूनतम मि सअलाइनमेंट को चालूकरता है
3. कोण मि सअलाइनमेंट की एक बड़ी सीमा - तेज़, मजबूत एंड्रॉइड।
4. तेज़ मानव आंदोलन - कोण मि सअलाइनमेंट की एक बड़ी सीमा
5. एक व्यक्ति "कोणीय वेग - कोण बेमेल की सीमा", "नि यंत्रण वि लंब - कोण बेमेल की सीमा" के आधार पर
ग्राफ़ चुनता है: मानव आंदोलनों का अधि क नि यंत्रण वि लंब या कोणीय वेग - कोण बेमेल की एक बड़ी सीमा।
ताकि कठोर सतहेंऔर वस्तुएंलोचदार न लगें:
1. टेलीप्रेजेंस सूट के ड्राइव की ताकतेंमानव मांसपेशि यों की तुलना मेंकम सेकम दोगुनी मजबूत होती हैं
2. ड्राइव की ब्रेकि ंग गति 0.1 सेकंड सेभी खराब नहींहोती
जैसे-जैसेकोणीय वेग बढ़ता है, सॉफ्टवेयर बढ़ता है:
1. पोलि गं एंगल ससें र की आवत्तिृ (पर्वाू नमु ान एल्गोरि थ्म)
2. नि यंत्रण वि लंब को कम करनेके लि ए कोण बेमेल की सीमा
3. कोणीय त्वरण की सीमा
मानव शक्ति के वि कास या उसके वि कास की गति के साथ, सॉफ्टवेयर बढ़ता है:
1. नि यंत्रण वि लंब को कम करनेके लि ए कोण बेमेल सीमा
2. नि यंत्रण वि लंब को कम करनेके लि ए कोणीय त्वरण की सीमा
3. बल और कोण सेंसर के सर्वेक्षण की आवृत्ति (पूर्वा नुमान एल्गोरि थ्म)
सैपर रोबोट, सर्जि कल रोबोट:
1. बल ससें र और कोणों के पोलि गं की आवत्तिृ अधि क होती है
2. कोण बेमेल की सीमा छोटी होती है
3. कोणीय त्वरण की सीमा छोटी होती है
4. कोणीय वेग गणु ांक की स्थापना (स्के लि गं : कोणीय मेंकई बार कमी वेग)
5. सीमाओंकी सेटि ंग कोणीय वेग, कोणीय त्वरण
6. कोण सेंसर, बलों की अधि क सटीकता
7. तेज़ सेंसर, ड्राइव
8. केबल तनाव का बढ़ा हुआ व्यास और बल
9. छोटेबलों की नि र्धा रि त सीमा मेंसंवेदनशीलता सेटि ंग (छोटा या नकारात्मक लाभ)
10. सुचारू गति , अर्थव्यवस्था और न्यूनतम नि यंत्रण वि लंब के लि ए उच्च संरचनात्मक कठोरता
11. रोबोट सेमानव तक गति के संचरण मेंबल ढाल के लाभ गुणांक को सेट करना
12. माइनस्वीपर रोबोट: मानक खदान भागों की वज़न सीमा (ऊर्ध्वा धर मेंप्रक्षेपण का परि वर्तन) सेट करना,
जि समेंसि ग्नलि गं डि वाइस शामि ल है: हाथ के क्लम्पिै गं फ़्रे म का उच्च-आवत्तिृ कं पन, स्क्रीन पर एक श्रव्य
(आवाज़) संकेत या पाठ
ड्राइव का त्वरण
1. सि ग्नल द्वारा संचालि त ड्राइव फ़ीडबैक का त्वरण ड्राइव ड्राइव के त्वरण के सीधेआनुपाति क है
2. नि यंत्रण वि लंब जि तना लंबा होगा, ड्राइव फ़ीडबैक का सि ग्नल द्वारा संचालि त त्वरण उतना ही अधि क
होगा। त्वरण एल्गोरि थ्म को व्यक्ति द्वारा चुना जाता है
फीडबैक सि ग्नल कोण के आसन्न स्तरों के बीच एंड्रॉइड (मानव) हाथों के कोणीय दोलनों को नि म्नानुसार
हटाया जाता है:
1. एंड्रॉइड हैंड एंगल सेंसर में, एक्सोस्केलेटन में, कोणीय संकल्प फीडबैक सि ग्नल की तुलना मेंअधि क होता है
2. फीडबैक सि ग्नल मेंकोण की न्यूनतम इकाई की सीमा को पार करनेके बाद, एंड्रॉइड आर्म सेंसर
(एक्सोस्केलेटन) में, एक एल्गोरि दमि क देरी के साथ ड्राइव आर्म के कोण को इस सीमा पर बि ल्कुल तब तक
रखता हैजब तक कि फीडबैक सि ग्नल फीडबैक सि ग्नल मेंकोण की अगली न्यूनतम इकाई को पार करनेका
आदेश नहींदेता।
ट्रैफ़ि क कम है- सॉफ़्टवेयर "ट्रैफ़ि क - कोणीय संकल्प" तालि का के अनुसार फ़ीडबैक के कोणीय संकल्प को कम
कर देगा।
2,5-10 हर्ट्ज दोलन बल सेंसर क्लच को नि यंत्रि त करके परजीवी दोलन फ़ि ल्टर को बुझातेहैं। सॉफ़्टवेयर
नकारात्मक त्वरण संकेतों को सकारात्मक त्वरण संकेतों की तुलना मेंअधि क लाभ और क्षीणन देता है: सेंसर
के लाभ और क्षीणन ग्राफ़ सेट करना।
पावर फीडबैक के मास्टर और स्लेव ड्राइव के जड़त्वीय दोलन ड्राइव की अनुनाद आवृत्ति यों की धड़कन देतेहैं।
समाधान: ड्राइव की गति की दोनों दि शाओंमेंस्प्रि गं लगाना, ड्राइव वाइंडि गं के प्रेरक प्रति रोध नि यत्रं ण
(वाइंडि गं सेक्शन का कम्यटू ेशन) ड्राइव और परजीवी फीडबकै दोलनों की जड़ता को काफी कम कर देता है,
परजीवी दोलनों की आवृत्ति और ड्राइव की गति को बढ़ाता है(फ़ि ल्टर के साथ नि कालना आसान है)।
"फ्लाईव्हील + इलेक्ट्रोमैग्नेटि क क्लच + फ्रि क्शन क्लच" सि स्टम (क्लच समानांतर मेंकाम करतेहैं) की दो
सेकंड की स्टार्टिं ग पावर (परि धीय गति के अनुपात में। पावर = टॉर्क को RPM सेगुणा कि या जाता है) स्क्रैच
सेतेज होनेवाली इलेक्ट्रि क मोटर से20 गुना ज़्यादा है।
फ्रि क्शन क्लच मुख्य टॉर्क प्रदान करता है, ड्राइव के आउटपुट टॉर्क सेंसर के साथ फीडबैक मेंट्रांजि स्टर क्लच,
टॉर्क या ब्रेक जोड़ता हैताकि आउटपुट टॉर्क ग्राफ इनपुट सि ग्नल के साथ मेल खाए। फ्लाईव्हील के व्यास को 1
मीटर तक बढ़ाकर फ्रि क्शन क्लच के बि ना यह बेहतर है।
सॉफ्टवेयर केबल के तनाव को स्थि र रखता है(केबल संसाधन वृद्धि ), टेलीप्रेजेंस सूट के लोचदार वि रूपण का
चयन करता है, जि ससेनि यंत्रण मेंदेरी कम होती है।
टेलीप्रेजेंस सूट के केबल उच्च-मापांक (गैर-स्प्रि ंगी) होतेहैं, जि नमेंदक्षता बढ़ानेऔर नि यंत्रण मेंदेरी को कम
करनेके लि ए ध्वनि की उच्च गति होती है। केबल के बढ़ेहुए तनाव बल सेवस्तुओंके आकार, सतह की
संरचना की संवेदनाओंकी यथार्थवादि ता बढ़ जाती है।
0,02 सेकंड की नि यंत्रण देरी है
टेलीप्रेजेंस सूट ग्रुप ड्राइव: ग्रुप ड्राइव मॉड्यूल की पुली के साथ 38 केबल चलती हैं। 12 केबल प्रत्येक आर्म
एक्सोस्केलेटन मेंजाती हैं। 14 केबल हि प बैलेंसर और एक्सोस्केलेटन के पैरों मेंजाती हैं
ग्रुप ड्राइव मॉड्यूल मेंमानव पीठ के दाएंऔर बाएंवि परीत घुमाव के दो लंबेइलेक्ट्रि क फ्लाईव्हील मोटर-1-2
हैं। इलेक्ट्रि क फ्लाईव्हील मोटर की धुरी मानव रीढ़ की धुरी के समानांतर होती है, जो मानव पीठ पर लंबवत
स्थि त होती है।
टेलीप्रेजेंस सटू की इलेक्ट्रि क फ्लाईव्हील मोटर एक घमू ने वाली लबं ी धरु ी-डी है, जि स पर एक सि गं ल-फे ज
वाइंडि गं के साथ डि स्क-स्टेटर-डीएस लगे होते हैं। डि स्क-स्टेटर-डीएस का व्यास 1 मीटर है।
एक नि श्चि त तीन-चरण स्टार्टर की टेपि गं (इलेक्ट्रि क मोटर-फ्लाईव्हील के ऊपरी सि रे पर) इलेक्ट्रि क
फ्लाईव्हील मोटर को घमु ाती है। रेक्टि फायर के माध्यम से इलेक्ट्रि क मोटर-फ्लाईव्हील की वाइंडि गं मेंप्रेरि त
करंट इलेक्ट्रि क मोटर-फ्लाईव्हील की धुरी-डी के अंदर समाक्षीय डीसी केबल मेंजाता है। नि यंत्रण संकेत पर,
ट्रांजि स्टर क्लच केबल सेजुड़ेहोतेहैं।
क्लच - स्टेटर डि स्क-डीएस के बाहर घमू ता हुआ सि लेंडर-एम। सि लेंडर-एम के अदं र स्थायी चबंु क चि पके हुए
हैं। सि लेंडर-एम साइड सेडि स्क-एम सेजुड़ा हुआ है। डि स्क-एम मेंएक रोलर बेयरि ंग-एल और ग्रुप ड्राइव के
केबल के 4 मोड़ के लि ए एक सर्पि ल ट्रैक के साथ एक ड्राइव पुली-टीटी है।
पुली-टीटी शुरुआती स्थि ति मेंवापसी के साथ 4 चक्कर तक घूमती है। पुली-टीटी इलेक्ट्रि क मोटर-फ्लाईव्हील
के घूर्णन डि स्क-स्टेटर-डीएस के बीच स्थि त एक नि श्चि त फ्रेम-आरएस मेंएक ट्यूबलर अक्ष-टीओ पर घूमती
है। नि श्चि त फ्रेम-आरएस अक्ष-डी को नहींछूता है।
पुली-टीटी लंबेमूक लोचदार ट्यूबलर रोलर्स के साथ एक वि भाजक के साथ एकल-पंक्ति रोलर बेयरि ंग-एल पर
घूमती है। वि भाजक मेंदो डि स्क हैंजो ट्यूबलर रोलर्स के अंदर सेगुजरनेवाली कुल्हाड़ि यों सेजुड़ी हैं।
पलिु गं के बल की पलु ी-टीटी का व्यास सि लेंडर-एम के व्यास से ~ 10 गनु ा छोटा है। के बल को पलु ी-टीटी पर एक
छोर पर स्थि र कि या जाता है, केबल का दूसरा छोर बड़ेव्यास की संचालि त पुली पर जाता है।
लोड के तहत इलेक्ट्रि क फ्लाईव्हील मोटर के रोटर की पुली-टीटी केबल को खींचनेवालेरेडि यल बल को स्थि र
फ्रेम-आरएस तक पहुंचाती है। केबल को खींचनेवाला रेडि यल बल लंबी धुरी-डी पर कोई भार उत्पन्न नहीं
करता है।
इलेक्ट्रि क फ्लाईव्हील मोटर की रोटर पुली लंबी धुरी-डी के साथ समाक्षीय होती हैं। ड्राइव पुली-टीटी सेनि कलने
वाली पलिु गं के बल इलेक्ट्रि क मोटर-फ्लाईव्हील की घर्णू न डि स्क-स्टेटर-डीएस के बीच से गजु रती है और बाहर
सेसंचालि त पुली मेंप्रवेश करती है। संचालि त पुली से, केबल टेलीप्रेजेंस सूट एक्सोस्केलेटन की भुजाओंऔर
पैरों तक जाती हैं।
क्लच कंट्रोल सि ग्नल रोटर्स को इलेक्ट्रि क फ्लाईव्हील मोटर सेजोड़ता है। रोटर टेलीप्रेजेंस सूट के हाथों और
पैरों के एक्सोस्केलेटन के ग्रुप ड्राइव के 38 केबल को घुमातेहैं।
आर्म फ्लेक्सर केबल का रि वर्स स्ट्रोक आर्म एक्सटेंसर केबल के वर्किं ग स्ट्रोक के कारण होता है। आर्म
एक्सटेंसर केबल का रि वर्स स्ट्रोक आर्म फ्लेक्सर केबल के वर्किं ग स्ट्रोक के कारण होता है।
इलेक्ट्रि क मोटर-फ्लाईव्हील के रोटर व्यास 1 मीटर के कारण पुली मेंबड़ा टॉर्क होता है। आर्म एक्सोस्केलेटन
की ताकत फ्लेक्सर पर काम करनेवालेआधेकेबल और आर्म एक्सोस्केलेटन के एक्सटेंसर पर काम करने
वालेआधेकेबल के कारण बहुत अच्छी है- उंगलि यों मेंएक छोटा स्ट्रोक होता है, उसी केबल के कंधों मेंएक
लंबा स्ट्रोक होता है।
ड्यूल-मोड क्लच
ड्राइव का क्लच अधि कतम पावर मोड मेंफीडबैक सि ग्नल के अनुसार आउटपुट शाफ्ट के रोटेशन एंगल का
80% करता है। 20% - सटीक स्टॉप मोड में।
अधि कतम पावर मोड - क्लच वाइंडि गं के सि गं ल पल्स की शक्ति को वि नि यमि त कि या जाता है।
सटीक स्टॉप मोड - क्लच वाइंडि गं की पल्स आवत्तिृ को वि नि यमि त कि या जाता है। सटीक स्टॉप मोड में, ड्राइव
एंटीफ़ेज़ मोड मेंकाम करतेहैं। फ्लेक्सर एक्ट्यूएटर एक्सटेंसर एक्ट्यूएटर के वि रुद्ध काम करतेहैं।
ड्राइव के सचं ालन का एंटीफ़े ज़ मोड ससें र पोलि गं की प्रत्येक अवधि मेंएक्सोस्के लेटन को धीमा कर देता है,
सि ग्नल के कोण पर हाथ (परै ) के रोटेशन के कोण को समायोजि त करता है। सॉफ़्टवेयर स्प्रि गं कपलि गं के
त्वरण संकेतों के आधार पर शॉक एब्जॉर्बर के साथ परि णामी कंपन को कम करता है।
दो-तरफ़ा फीडबकै सि ग्नल मेंसभी ससें र की पोलि गं आवत्तिृ कम हो जाती है (ससें र पोलि गं अवधि बढ़ जाती है)
नि यत्रं ण वि लबं मेंवद्ृ धि या सचं ार ट्रैफ़ि क मेंकमी के साथ। ससें र पोलि गं अवधि का 80% अधि कतम पावर
मोड मेंहै, शेष 20% सटीक स्टॉप मोड मेंहै।
सॉफ़्टवेयर ड्राइव को थोड़ा पहलेधीमा कर देता है- जि स तरह सेहाथ (पैर) का एक्सोस्केलेटन चलता है, वह
केबल की लंबाई मेंएक लोचदार कमी है।
सॉफ़्टवेयर मेंनि यंत्रण देरी को कम करनेके लि ए, "बल - अनुनाद आवृत्ति ", "बल - लोचदार केबल स्ट्रोक"
तालि काओंको फीडबैक सि ग्नल सेजोड़ा जाता है।
ट्रांजि स्टर क्लच "कोणीय त्वरण - त्वरण अवधि " तालि काओंके अनुसार काम करतेहैं।
इलेक्ट्रि क मोटर-फ्लाईव्हील वाइंडि गं का नि यत्रं ण सि ग्नल इलेक्ट्रि क मोटर-फ्लाईव्हील के अतं मेंएक घर्णू न
ट्रांसफार्मर के माध्यम सेइलेक्ट्रि क मोटर-फ्लाईव्हील तक जाता है।
क्लच नि यंत्रण सि ग्नल प्रत्येक रोटर के चक्करों को अलग-अलग नि यंत्रि त करता है। प्रत्येक इलेक्ट्रि क
मोटर-फ्लाईव्हील के बाहर 19 रोटर हैंजि नमेंपुली दाहि नेहाथ (हाथ 4 उंगलि यां), मानव पैरों के
एक्सोस्केलेटन के 19 केबलों को घुमाती हैं। इलेक्ट्रि क फ्लाईव्हील मोटर की शक्ति को एक केबल मेंकेंद्रि त
कि या जा सकता है।
दीवार सेमानव टकराव का अनुकरण
के लि ए 4000 kW सेअधि क के समूह ड्राइव की तात्कालि क शक्ति की आवश्यकता होती है, जो एक संधारि त्र
+ एक ट्रांजि स्टर स्वि च द्वारा प्रदान की जाती है। समाक्षीय केबल के संधारि त्र की ऊर्जा टेलीप्रेजेंस सूट के समूह
ड्राइव के ट्रांजि स्टर क्लच कपलि गं की वाइंडि गं मेंजाती है
उपग्रहों के बीच स्वि चि गं से सि ग्नल मेंरुकावट के खि लाफ सरु क्षा: समानांतर कनेक्शन - उपग्रह-ए ने अभी
तक सि ग्नल संचारि त करना समाप्त नहींकि या है, उपग्रह-बी फीडबैक सि ग्नल की नकल करतेहुए जुड़ा हुआ
है।
जब फीडबैक सि ग्नल बाधि त होता है, तो एंड्रॉइड सि ग्नल रुकावट एल्गोरि दम के अपवादों के अलावा
एल्गोरि दम के हि स्सेऔर सि ग्नल के पि छलेअंकों के संचालन को बरकरार रखता है, जो नुकसान को कम
करनेके लि ए एंड्रॉइड क्रि याओंकी एक सूची करता है।
एंड्रॉइड स्थि रता प्रणाली मेंमानव सेटि ंग्स:
1. एक व्यक्ति रेखा के ऊर्ध्वा धर सेआगेऔर पीछे वि चलन के कोणीय वेग को स्पष्ट करता है"द्रव्यमान का
केंद्र एंड्रॉइड के पैरों के समर्थन का तात्कालि क केंद्र है", जब यह अधि क हो जाता हैऔर सि ग्नल ट्रैफ़ि क की
अनुपस्थि ति में, एंड्रॉइड की अनुदैर्ध्य स्थि रता का एल्गोरि दम काम करना शुरू कर देता है।
2. एक व्यक्ति रेखा के ऊर्ध्वा धर सेदाएंऔर बाएंवि चलन के कोणीय वेग को स्पष्ट करता है"द्रव्यमान का
केंद्र एंड्रॉइड के पैरों के समर्थन का तात्कालि क केंद्र है", जब यह अधि क हो जाता हैऔर सि ग्नल ट्रैफ़ि क की
अनुपस्थि ति में, एंड्रॉइड अनुप्रस्थ स्थि रता एल्गोरि दम काम करता है।
3. एक व्यक्ति एंड्रॉइड के द्रव्यमान के केंद्र के ऊर्ध्वा धर आंदोलनों के वि स्तार की अवधि को स्पष्ट करता है
और अलग सेअपनी हथेलि यों मेंलोड के लि ए यह आंकड़ा नि र्दि ष्ट करता है, जब यह अधि क हो जाता हैऔर
सि ग्नल ट्रैफ़ि क की अनुपस्थि ति में, ऊर्ध्वा धर आंदोलनों का एल्गोरि दम काम करता है।
4. एक व्यक्ति एंड्रॉइड के द्रव्यमान के केंद्र के ऊर्ध्वा धर आंदोलनों के त्वरण के आंकड़ेको स्पष्ट करता हैऔर
अलग सेएंड्रॉइड की हथेलि यों मेंलोड के लि ए यह आंकड़ा स्पष्ट करता है, जब यह अधि क हो जाता हैऔर
ट्रैफ़ि क की अनुपस्थि ति में, ऊर्ध्वा धर आंदोलनों का एल्गोरि दम काम करता है।
5. एंड्रॉइड स्थि रता एल्गोरि दम के समानांतर संचालन मोड को सेट करना, जि समेंएल्गोरि दम फीडबैक
सि ग्नल सेस्वतंत्र रूप सेकाम करतेहैं।
एंड्रॉइड स्थि रता प्रणाली एल्गोरि दम: institutrobotov.ru/#7
एल्गोरि दम एंड्रॉइड की हथेलि यों मेंलोड के कोणीय अभि वि न्यास को संरक्षि त करतेहैं, इसके द्रव्यमान के केंद्र
की गति के त्वरण को लंबवत रूप सेकम करतेहैं। एंड्रॉइड की हथेलि यों मेंकार्गो : एक मशीन गन, लंबी दूरी की
थर्मल इमेजर…
एंड्रॉइड स्थि रता प्रणाली एंड्रॉइड को चलनेऔर दौड़नेकी समस्याओंसेबचाती हैजो कि सी इंसान के सि ग्नल में
नहींथीं। एंड्रॉइड के पैरों में3D-सेंसर रैखि क त्वरण है। जब एंड्रॉइड पैर के महत्वपूर्ण त्वरण आंकड़ेपार हो जाते
हैं, तो उनका सि ग्नल (इंस्टॉलेशन) मानव पैर की ड्राइव मेंजाता है। महत्वपूर्ण संख्याएँएंड्रॉइड की गति की
गति सेतालि काओंद्वारा जुड़ी हुई हैं।
दौड़ते समय, यदि एंड्रॉइड रनि गं सेफ्टी एल्गोरि दम (ABBA) पता लगाता है - मानव सि ग्नल एंड्रॉइड को गि रा
देगा - ABBA एंड्रॉइड के अपने रनि गं एल्गोरि दम को चालू कर देगा, एंड्रॉइड की गति को मानव सि ग्नल के
अंकों मेंसमायोजि त करेगा। ABBA आपको क्रि टि कल एंगल्स, एंड्रॉइड वर्टि कल के कोणीय वेग को पार करने
की अनुमति नहींदेता है।
जानबूझकर एंड्रॉइड को गि रानेके लि ए, व्यक्ति को ब्रश से"ड्रॉप एंड्रॉइड" इशारा करना चाहि ए।
ABBA में"वॉकि ंग" मोड है- गति सीमा व्यक्ति द्वारा नि र्दि ष्ट की जाती है।
ABBA, "वॉकि ंग" मोड
एंड्रॉइड को चलतेसमय, व्यक्ति पैरामीटर सेट करता है: कदम की लंबाई और आवृत्ति , कदम की ऊंचाई, कदम
के शन्ू य बि दं ु पर घटु ने का कोण, धड़ का ढलान। एंड्रॉइड व्यक्ति से स्वतत्रं रूप से अपने चलने और दौड़ने के
एल्गोरि दम सेचलनेके बाकी मापदंडों को लेता है, ताकि नि यंत्रण देरी चलनेकी गुणवत्ता को प्रभावि त न करे।
प्रत्येक टेम्पलेट वॉकि ंग केस का अपना नंबर होता है। नंबर टेम्पलेट वॉकि ंग केस यह नि र्धा रि त करता हैकि
एल्गोरि दम कि स मानव चलनेके मापदंडों को ध्यान मेंरखता हैऔर कौन सेनहीं।
टेलीप्रेजेंस सूट के सॉफ्टवेयर मेंवॉकि ंग एल्गोरि दम का एक एनालॉग है। बड़ेनि यंत्रण वि लंब के साथ
एल्गोरि थ्म का एक एनालॉग (नि यंत्रण वि लंब अवधि के साथ एल्गोरि थ्म की सारणीबद्ध प्रति क्रि या) एंड्रॉइड
वॉकि ंग एल्गोरि दम के अनुसार पैरों के एक्सोस्केलेटन को स्थानांतरि त करता हैताकि एक्सोस्केलेटन के पैरों
के कोण एंड्रॉइड के पैरों के कोणों के साथ मेल खातेहों।
ट्रंक का अनुदैर्ध्य महत्वपूर्ण कोण एंड्रॉइड के रनि गं लाइन के अनदु ैर्ध्य ऊर्ध्वा धर वि मान पर ऊर्ध्वा धर और
प्रक्षेपण के बीच का कोण हैजो इस पैर के अधि कतम जोर बल के क्षण मेंएंड्रॉइड के द्रव्यमान के केंद्र और पैर
के फुलक्रम को जोड़ता है। यदि ट्रंक का अनुदैर्ध्य महत्वपूर्ण कोण सामान्य सेकम है(झुकाव बहुत पीछे है), तो
एल्गोरि थ्म कदम के शन्ू य बि दं ु पर घटु ने के कोण को कम कर देता है।
यदि ट्रंक का अनुदैर्ध्य महत्वपूर्ण कोण मानक सेअधि क है(झुकाव बहुत आगेहै), तो
एल्गोरि थ्म कदम के शन्ू य बि दं पर घटु ने के कोण को बढ़ाता है। कदम का शन्ू य बि दं ु वह बि दं ु है जि स पर ब्रेक
लगाने के साथ लडिैं गं त्वरण मेंबदल जाती है: ट्रंक के द्रव्यमान के केंद्र का अनदु ैर्ध्य त्वरण शन्ू य है।
दौड़नेका अनुदैर्ध्य ऊर्ध्वा धर तल एंड्रॉइड के द्रव्यमान के केंद्र सेहोकर गुजरनेवाला एक ऊर्ध्वा धर तल हैऔर
एंड्रॉइड के गति वेक्टर के समानांतर है।
ट्रंक का बायांअनुप्रस्थ क्रांति क कोण एंड्रॉइड के द्रव्यमान के केंद्र और बाएंपैर के फुलक्रम को जोड़नेवाली
एंड्रॉइड की रनि गं लाइन के अनप्रु स्थ ऊर्ध्वा धर तल पर ऊर्ध्वा धर और प्रक्षेपण के बीच का कोण है, जो इस परै
के अधि कतम जोर के क्षण मेंहै
रनि गं का अनप्रु स्थ तल एंड्रॉइड के द्रव्यमान के केंद्र से होकर गजु रने वाला एक ऊर्ध्वा धर तल है और दौड़ने के
अनुदैर्ध्य तल के लंबवत है।
ट्रंक का दायांअनुप्रस्थ क्रांति क कोण एंड्रॉइड के द्रव्यमान के केंद्र और दाएंपैर के फुलक्रम को जोड़नेवाली
एंड्रॉइड की रनि गं लाइन के अनप्रु स्थ ऊर्ध्वा धर तल पर ऊर्ध्वा धर और प्रक्षेपण के बीच का कोण है, जो इस परै
के अधि कतम जोर के क्षण मेंहै।
चलनेवालेएंड्रॉइड अवतार के पैर के अनुदैर्ध्य , अनुप्रस्थ कोणों का एल्गोरि थ्म मानव सेस्वतंत्र रूप सेकाम
करता है(अपवाद: मानव सेटि ंग्स):
1. पैर का अनुप्रस्थ कोण शून्य हो जाता है। एल्गोरि थ्म-1 पैर के अनुप्रस्थ कोण के शून्य सेनि लंबन सीमक
वि चलन की कठोरता को नि यंत्रि त करता है, प्रगति शील नि लंबन का ग्राफ (इसके स्ट्रोक पर नि लंबन की
कठोरता के आधार पर)। एंड्रॉइड के चलने(दौड़ने) की गति मेंवृद्धि के साथ नि लंबन की कठोरता बढ़ जाती है,
जि स सतह पर पैर उतरता हैउसकी चि पचि पाहट के प्रति शत मेंकमी के साथ। एल्गोरि थ्म-1 2 फ्रंट फुट फोर्स
सेंसर के अंकों का उपयोग करके पैर के अनुप्रस्थ कोण को नि यंत्रि त करता है।
2. जब एंड्रॉइड मोड़ पर चलता है(दौड़ता है), तो पैर का अनुप्रस्थ कोण एंड्रॉइड के एक अनुप्रस्थ केन्द्रापसारक
त्वरण सेंसर, दो फ्रंट फुट फोर्स सेंसर द्वारा सेट कि या जाता है।
3. पैर के अनुदैर्ध्य कोण मेंतालि काओंमेंएक मानक कोण आंकड़ा है। यह आंकड़ा एंड्रॉइड की चलने(दौड़ने)
की गति और एंड्रॉइड के अनप्रु स्थ ऊर्ध्वा धर तल से पि डं ली के झकु ाव, परै की लडिैं गं सतह की प्रति शत
चि पचि पाहट (तालि का) पर नि र्भर करता है।
एल्गोरि दम-2 पैर के अनुदैर्ध्य कोण का मानक आंकड़ा देता है।
एल्गोरि दम-2 सभी ऑपरेटि ंग मोड मेंपैर के 2 पंजों मेंसेप्रत्येक के लि ए वि चलन के कोण की संख्या
अलग-अलग सेट करता है।
फ्लटै वॉकि ंग, रनि गं का एल्गोरि दम - एंड्रॉइड का धड़ चनु े हुए रास्ते से बाईं ओर (दाईं ओर) गि रता है - बाएं
(दाएं) पैर पर समर्थन की ताकत और समय बढ़ाएं, दूसरेपर घटाएं, जब तक कि धड़ बग़ल मेंगि रना बंद न हो
जाए।
मानव पैरों मेंकंपन का अनुकरण
एंड्रॉइड की पि डं ली के पीछे, फर्श की सतह के ससें र इन्फ्रारेड अल्टीमीटर हैंजो "एड़ी से ज़मीन" की दरू ी को
मापतेहैं। जब एंड्रॉइड का पैर ज़मीन को छूता है, तो पैर के एक्सोस्केलेटन के ड्राइव, एक फीडबैक सि ग्नल का
अनुसरण करतेहुए, मानव पैर को तेज़ी सेऊपर और पीछे धकेलतेहैं, जो एंड्रॉइड के पैर पर कुल (एंड्रॉइड के पैर
के सेंसर के अनुसार) बल का अनुकरण करता है।
एंड्रॉइड के फ़्लोर सरफ़ेस सेंसर के सि ग्नल पर, एक्सोस्केलेटन का एक्टि व 3D सस्पेंशन पैर को ज़मीन पर
उतारनेसेपहलेएल्गोरि दम के अनुसार धीरे-धीरेमानव धड़ को नीचेकरता है, ताकि एंड्रॉइड के पैर को धकेलने
के क्षण में, अधि कतम 15 सेमी की अवधि के साथ एक्टि व 3D सस्पेंशन मानव पैर को ऊपर और आगेफेंकता
है, जो पैर पर भार मेंवृद्धि , एंड्रॉइड के दौड़नेमेंऊर्ध्वा धर त्वरण का अनुकरण करता है।
लडिैं गं और परै को ऊपर रखने के बीच 1 बार की अवधि के लि ए एक्टि व 3D सस्पेंशन का एल्गोरि दम व्यक्ति
को 15 सेमी नीचेलानेमेंसक्षम होना चाहि ए। ताकि सक्रि य 3D-नि लंबन की 15 सेमी स्ट्रोक लंबाई मानव पैर
के अधि भार के पर्या प्त लंबेसि मुलेशन के लि ए पर्या प्त हो, जब पैर फर्श को छूता हैऔर उसेऊपर धकेलता है।
एल्गोरि थ्म फीडबैक सि ग्नल सेसमय की अवधि -1 लेता है।
"पूर्वा नुमान" मोड में, औसत नि यंत्रण देरी के साथ, एल्गोरि थ्म अनुमानि त नि यंत्रण देरी समय सेपहलेमानव
पैर को एक सि म्युलेटेड पुश देता है। कि सी व्यक्ति के लि ए प्रति शत नि र्भरता "नि यंत्रण देरी - लीड समय" को
मैन्युअल रूप सेसेट करनेकी क्षमता के साथ। एक बड़ेनि यंत्रण वि लंब के साथ, एल्गोरि थ्म एंड्रॉइड के पैर पर
औसत बल को 2-4 चरणों मेंसि म्यलु ेट करता है, जि समेंवेग वेक्टर और एंड्रॉइड के परै की औसत लडिैं गं
ऊंचाई को ध्यान मेंरखा जाता है।
दौड़तेसमय, प्रत्येक कि क के बाद धड़ के जड़त्व के बल को मानव नि लंबन के 3D-कार्डन के AXIS-2 को
मोड़कर एक व्यक्ति के पीछे की ओर एक अल्पकालि क चरणबद्ध झुकाव द्वारा सि म्युलेट कि या जाता है।
झुकाव कि क के बाद एंड्रॉइड के धड़ के जड़त्व बल के समानुपाती होता है।
टेलीप्रेजेंस सूट द्वारा त्वरण का अनुकरण:
1. एंड्रॉइड दाएंकंधेपर भारी भार डालता है
- दाएंपैर के 3 सेंसर मेंबाएंपैर की तुलना मेंअधि क बल होता है। टेलीप्रेजेंस सूट, एंड्रॉइड फुट फोर्स सेंसर से
संकेतों का उपयोग करतेहुए, "पैरों मेंअंकों का प्रति शत अंतर - टेलीप्रेजेंस सूट के झुकाव का कोण", "पैरों में
अंकों का प्रति शत अंतर - टेलीप्रेजेंस सूट के झुकाव का कोणीय वेग", "दाएंपैर के बलों के योग की वृद्धि दर -
टेलीप्रेजेंस सूट के झुकाव का कोणीय वेग" तालि काओंके अनुसार व्यक्ति को दाईं ओर झुकाता है।
एल्गोरि दम टेलीप्रेजेंस सूट के झुकाव के कोणीय वेगों को जोड़नेके नि यमों का उपयोग करता है। यातायात
सीमि त है- एंड्रॉइड के पैर की ताकत सेंसर की संख्या के बजाय, प्रति शत अंतर आंकड़ा + एंड्रॉइड के दाहि नेपैर
की ताकतों के योग की वृद्धि दर है
2. एंड्रॉइड नीचेकूदता है- इसका भारहीनता सेंसर (वर्टि कल एक्सेलेरेशन सेंसर) टेलीप्रेजेंस सूट को भारहीनता
का संकेत देता है- टेलीप्रेजेंस सूट का सक्रि य 3D सस्पेंशन आसानी सेधड़ के एक्सोस्केलेटन को नीचेलेजाता
है ताकि एंड्रॉइड लडिैं गं से ओवरलोड के सि मलु ेशन मेंव्यक्ति के ऊपर की ओर स्ट्रोक की लबं ाई को अधि कतम
कि या जा सके
3. चलने, दौड़ने, कूदनेमेंपैर को लैंड करतेसमय, पैर ड्राइव, व्यक्ति के पैर को तेजी सेऊपर फेंकतेहुए,
एंड्रॉइड के पैर की तरह उसके पैर पर भार का अनुकरण करता है। नि लंबन का रि वर्स कोर्स धीमा है
4. आगेकी ओर बढ़तेसमय, एंड्रॉइड दौड़तेसमय पीछे की ओर झुकता है। एंड्रॉइड के धड़ के 3D-जाइरोस्कोप
के संकेत पर, टेलीप्रेजेंस सूट व्यक्ति को इस कोण पर वापस झुकाता है। व्यक्ति सहज रूप सेअपनेधड़ को
आगेकी ओर झुकाता है, एंड्रॉइड की स्थि ति की स्थि रता को बनाए रखता है, अपनेधड़ के कोणीय वेग को शून्य
करता है। उसी समय, एंड्रॉइड स्थि रता प्रणाली के एल्गोरि दम सक्रि य होतेहैं
5.5. एंड्रॉइड धीमा हो जाता है- टेलीप्रेजेंस सूट व्यक्ति को आगेकी ओर झुकाता है। व्यक्ति सहज रूप सेअपने
धड़ को पीछे की ओर झुकाता है, एंड्रॉइड की स्थि ति की स्थि रता को बनाए रखता है, अपनेधड़ के कोणीय वेग
को शून्य करता है
6. 90 डि ग्री के कोण पर आगेया पीछे झुकनेसे, टेलीप्रेजेंस सूट 1g के अधि कतम त्वरण का अनुकरण करता
है
7. एक मोड़ मेंएंड्रॉइड का केन्द्रापसारक बल एक व्यक्ति के बग़ल मेंझुकाव का अनुकरण करता है।
एल्गोरि दम, पैरों पर भार को बराबर करतेहुए, घुटनों को अलग-अलग कोणों पर मोड़ता है
8. चलनेवाली सतह के पार्श्व ढलान की वृद्धि के साथ, एंड्रॉइड झुकाव कोण सेंसर ट्रंक के एक्सोस्केलेटन को
एक कोण, कोणीय त्वरण देता है। बग़ल मेंन गि रनेके लि ए, एक व्यक्ति सहज रूप सेएंड्रॉइड की स्थि ति की
स्थि रता बनाए रखता है, धड़ के कोणीय वेग को शून्य करता है
9. ब्रेकि ंग बस में, खड़ेएंड्रॉइड का धड़ कोण सेंसर धड़ एक्सोस्केलेटन को कोण, कोणीय वेग संचारि त करता है।
आगेकी ओर न गि रनेके लि ए, व्यक्ति एंड्रॉइड के धड़ के कोणीय वेग को रीसेट करनेसेपहलेपीछे की ओर
झुकता है, इसके झुकाव कोण सेंसर के अनुसार रीसेट कि या जाता है
10. पहाड़ सेनीचेस्कीइंग (स्लैलम) एक 3D-कार्डन और एक सक्रि य 3D-नि लंबन के अक्ष झुकाव द्वारा
अनुकरण करता है। प्राकृति क मानव झुकाव समुद्री बीमारी की संभावना को कम करता है
टेलीप्रेजेंस सुइट्स मेंरि मोट मार्शल आर्ट्स
6000 कि लोमीटर तक की दूरी पर कुश्ती के लि ए, फोर्स फीडबैक के अलावा, सर्वर कंप्यूटर सॉफ्टवेयर और
उनके शरीर के 3डी स्कैन की जरूरत होती है। अंतरि क्ष मेंपहलवानों की स्थि ति सॉफ्टवेयर द्वारा
एक्सोस्केलेटन के कोणों द्वारा नि र्धा रि त की जाती है।
सॉफ्टवेयर पहलवानों के साथ समन्वय प्रणाली को नि र्धा रि त करता है, जो गणना की गई फर्श की सतह +
पहलवानों के सपं र्क के 2-3 बि दं ओु ं (हाथ की पकड़, स्वीप) के आधार पर नि र्धा रि त करता है। इन बि दं ओु ं की
ऊंचाई सॉफ्टवेयर द्वारा हाथों और पैरों के एक्सोस्केलेटन के कोनों पर, ऊर्ध्वा धर सेदो अक्षों के साथ धड़ के
ढलान के साथ गणना की जाती है।
गणना में, सॉफ्टवेयर उपयोग करता है:
1. पैर बल सेंसर की संख्या
2. सपं र्क के 2-3 बि दं ओु ं (पकड़, कट) पर कार्य करने वाले बल
3. एक सफल थ्रो - पैर बल सेंसर सेशून्य संकेत है
4. पहलवानों के शरीर के कोणीय और रैखि क आंदोलनों के प्रक्षेप पथ के आंकड़े3D-CARDAN और ट्रंक के
एक्सोस्केलेटन के 3D-त्वरण सेंसर सेआतेहैं। यह पहलवानों के बीच संपर्क खो जानेपर समन्वय प्रणाली को
संरक्षि त करता है।
5. समूह ड्राइव के क्लच मेंवर्तमान ताकत के अनुसार, सॉफ्टवेयर शरीर के वजन, वि भि न्न अक्षों मेंजड़ता के
क्षणों, रि सेप्शन के बाद दोनों नि कायों की स्थि ति की गणना करता है। वर्तमान ताकत और क्लच नंबर फीडबैक
सि ग्नल मेंजातेहैं।
"पूर्वा नुमान" मोड में, आभासी और संवर्धि त वास्तवि कता मोड में, मानव नि लंबन के 3D-कार्डन की कुल्हाड़ि यों
को घुमानेके लि ए कमांड अवतार के पैरों की ताकत के 3D-सेंसर द्वारा दि या जाता है। उनकी संख्या और पैर
मेंबल वेक्टर के अनुसार, कि सी व्यक्ति के द्रव्यमान के केंद्र की स्थि ति के अनुसार, सॉफ्टवेयर 3D-कार्डन की
ड्राइव के क्षणों की गणना करता है।
स्परिै गं मार्शल आर्ट में, सॉफ्टवेयर शरीर के वजन, वेक्टर और प्रभाव के बि दं ु पर गति द्वारा नि कायों की
अतिं म कोणीय स्थि ति की गणना करता है। प्रभाव वेक्टर ट्रंक के कं धे और कमर त्वरण ससें र की रीडि गं के
बीच का अंतर है। प्रभाव पल्स ट्रंक के त्वरण सेंसर पर कुल प्रभाव वेक्टर का मूल्य है। सॉफ्टवेयर वीडि यो चैनल
के माध्यम सेनि कायों की अंति म स्थि ति को सही करता है।
6000 कि मी तक की दूरी पर टेलीप्रेजेंस सूट मेंएक पुरुष और एक महि ला के बीच रि मोट सेक्स के लि ए सर्वर
सॉफ्टवेयर की समान गणना।
ऑब्जेक्ट कैप्चर एल्गोरि दम
ऑपरेटर द्वारा ऑब्जेक्ट को कैप्चर करनेके बाद, एल्गोरि दम ब्रश सेकैप्चर कि ए जानेके बाद 3-4 सेकंड के
लि ए कलाई सेऑब्जेक्ट के औसत संपीड़न बल के मानक की गणना करता है। इसके अलावा, ऑपरेटर द्वारा
पकड़ बल मेंछोटेउतार-चढ़ाव या फीडबैक मेंरुकावट के साथ, ड्राइव एंड्रॉइड कलाई के साथ वस्तुके संपीड़न
बल को कम सेकम वस्तुकी कलाई के साथ औसत बल-1 संपीड़न के मानक पर बनाए रखता हैताकि एंड्रॉइड
वस्तुको न गि राए।
एक ऊर्ध्वा धर सीढ़ी पर चढ़नेके लि ए एल्गोरि थ्म एंड्रॉइड के धड़ की छवि पहचान और स्थानि क त्वरण सेंसर
पर आधारि त है। एक बड़ेनि यंत्रण वि लंब के साथ, एल्गोरि थ्म एंड्रॉइड को रस्सी की सीढ़ी पर चढ़नेमेंमदद
करेगा।
पीठ के पीछे हाथ नि यंत्रण
टेलीप्रेजेंस सूट का डि ज़ाइन आपको अपनेहाथों को अपनी पीठ के पीछे लेजानेसेरोकता है। यदि यह
आवश्यक है- आपकी उंगलि यों के साथ एक इशारा छाती-पीठ मोड को चालूकर देगा: अपनेहाथों को सामनेले
जाकर, एक व्यक्ति एंड्रॉइड के हाथों को उसकी पीठ के पीछे मि रर करता है- एंड्रॉइड के रि यर स्टीरि यो कैमरे
स्वचालि त रूप सेचालूहो जातेहैं।
एंड्रॉइड की ड्राइव टेबल
"मानव-एंड्रॉइड" बल प्रति क्रि या चैनल में, बल सेंसर के मतदान की आवृत्ति 5-50 हर्ट्ज है(नि यंत्रण देरी पर
नि र्भर करता है)। बल प्रति क्रि या चैनल "एंड्रॉइड - बाहरी वातावरण" में, बल सेंसर के मतदान की आवृत्ति
1000-2000 हर्ट्ज है।
बल प्रति क्रि या चैनल "एंड्रॉइड - बाहरी वातावरण" में, एंड्रॉइड ड्राइव तालि काओंके अनुसार काम करतेहैं
"आकृति -1 बाहरी वातावरण के प्रति रोध बल मेंप्रति शत वृद्धि - आकृति -2 एंड्रॉइड के ड्राइव बल मेंप्रति शत
कमी जब तक व्यक्ति आकृति -1 पर प्रति क्रि या नहींकरता।"
नि यंत्रण वि लंब जि तना अधि क होगा, संख्या-2 उतनी ही अधि क होगी।
बाहरी वातावरण के प्रति रोध बल सेब्रेकि ंग त्वरण (एंड्रॉइड टि का पर त्वरण सेंसर) जि तना अधि क होगा, एंड्रॉइड
टेबल "नि यंत्रण वि लंब - ब्रेकि ंग त्वरण - चि त्र-2" मेंआंकड़ा-2 उतना ही अधि क होगा।
ऑपरेटर बल प्रति क्रि या चैनल "एंड्रॉइड - बाहरी वातावरण" की तालि काओंकी लाइब्रेरी मेंसेकि सी एक पेशेवर
(सैपर, सर्जन, हाथ सेहाथ का मुकाबला, लोडर...) को चुन सकता है।
आर्म एक्सोस्केलेटन लीवर सि स्टम व्यक्ति की भुजाओंके कि नारेपर होता है: आप अपनी कोहनी को घुटनों
पर रखकर फर्श पर बैठ सकतेहैं। पैरों के एक्सोस्केलेटन का लीवर सि स्टम पैरों के पीछे स्थि त होता है, पैरों के
कि नारों पर फैला हुआ नहींहोता है। व्यक्ति फर्श पर बैठकर अपनेघुटनों को 150° के कोण पर मोड़ सकता है,
एक अनुदैर्ध्य , अनुप्रस्थ सुतली बना सकता है।
टेलीप्रेजेंस सूट को चलानेके लि ए, मैंनेतीन-चरण इलेक्ट्रि क ड्राइव के एक सरलीकृत अल्ट्रा-सस्तेहाई-पावर
स्वि चि गं (अल्ट्रा-हाई करंट) का आवि ष्कार कि या।
घुटनेके नीचेऔर घुटनेके ऊपर के पैर को एक संतुलन तंत्र द्वारा श्रोणि के क्लैम्पि ंग फ्रेम के नि चलेहि स्सेसे
पीछे सेएक पुल-टी द्वारा जोड़ा जाता है। थ्रस्ट-टी मेंएक गैर-घूर्णन नि चला पाइप-टी1 और एक ऊपरी
पाइप-टी2 होता है। पाइप-टी1 व्यास मेंपाइप-2 सेबड़ा होता है, जि सके शीर्ष पर एक नट-टी होता है।
पाइप-टी2 एक आयताकार धागेवाला घूमनेवाला पेंच होता हैजि सेनट-टी मेंपेंच कि या जाता है।
टेलीप्रेजेंस सूट उपयोगकर्ता के कूल्हेकी लंबाई के अनुसार ट्रैक्शन-टी की लंबाई को समायोजि त करनेके लि ए,
ट्रैक्शन-टी2 घूमता है, जब तक कि बल सेंसर टेलीप्रेजेंस सूट की शुरुआती स्थि ति मेंघुटनेके खि लाफ आराम
नहींकरता हैऔर इलेक्ट्रि क मोटर (या वायवीय टरबाइन) को घुमानेवालेट्रैक्शन-टी2 को बंद नहींकर देता है।
श्रोणि का क्लैम्पि ंग फ्रेम एंड्रॉइड हि प बैलेंसर का एक एनालॉग है। एंड्रॉइड को सीढ़ि यों पर तेज़ी सेचढ़नेके लि ए
एंड्रॉइड हि प बैलेंसर की आवश्यकता होती है। बल प्रति क्रि या 2D-पेल्वि क हि ंज के दोनों कोणों (धड़ से) को
एंड्रॉइड के हि प बैलेंसर तक पहुंचाती है।
पेल्वि क क्लैम्पि ंग फ्रेम 2D-पेल्वि क हि ंज द्वारा धड़ क्लैम्पि ंग फ्रेम सेजुड़ा होता है। 2D-पेल्वि क हि ंज धड़
क्लैम्प फ्रेम को हि प लेग बैलेंसर सेजोड़ता है।
पेल्वि स का क्लैम्पि ंग फ्रेम पैरों के समूह ड्राइव के 2D-हि ंग के अक्षों मेंसेएक सेस्प्रि ंग हि ंज तंत्र के माध्यम से
जुड़ा होता हैजो आंदोलन की स्वतंत्रता प्रदान करता है, जि समेंबल श्रोणि के 2D-हि ंग पर नहीं, बल्कि मानव
रीढ़ पर लगाया जाता है, जो मानव पीठ के नि चलेहि स्सेकी स्वतंत्रता की धुरी और पैरों के समूह ड्राइव के
2D-हि ंग के बेमेल की भरपाई करता है। बल रीढ़ की हड्डी को कोक्सीक्स सेकमर तक के क्षेत्र मेंसमान रूप से
लोड करता है।
सैडल श्रोणि के क्लैम्पि ंग फ्रेम का एक हि स्सा है, जो दाएं-बाएंझुकता है, एक ऊर्ध्वा धर अक्ष मेंघूमता है। सैडल
ड्राइव के एल्गोरि दम कि सी व्यक्ति के वजन को उसके पैरों सेनहींहटातेहैं, सि वाय ऐसेमामलों के: एक एंड्रॉइड
मोटरसाइकि ल (कार) चलाता है- सैडल ड्राइव एंड्रॉइड के पैरों के वजन (एंड्रॉइड फुट फोर्स सेंसर) के अनुपात के
अनुसार एंड्रॉइड के वजन के अनुसार व्यक्ति के अधि कांश वजन को सैडल मेंस्थानांतरि त करता है
ड्राइव शून्य गुरुत्वाकर्षण मेंकि सी व्यक्ति के खि लाफ सैडल को नहींदबाता है: जब एक एंड्रॉइड मोटरसाइकि ल
पर एंड्रॉइड के धड़ मेंकूदता है, तो शून्य गुरुत्वाकर्षण में3D-त्वरण सेंसर सैडल के बल को रीसेट करता है।
ड्राइव शून्य गुरुत्वाकर्षण मेंकि सी व्यक्ति के खि लाफ सैडल को नहींदबाता है: जब एक एंड्रॉइड मोटरसाइकि ल
पर एंड्रॉइड के धड़ मेंकूदता है, तो शून्य गुरुत्वाकर्षण में3D-त्वरण सेंसर सैडल के बल को रीसेट करता है।
समूह ड्राइव मॉड्यूल सेनि चली केबल श्रोणि के 2D-हि ंग की पुली मेंजाती हैं। समूह ड्राइव मॉड्यूल सेऊपरी
केबल कंधेपुली ब्लॉक-पी मेंजाती हैं।
पुली-पी का कंधेब्लॉक ऊर्ध्वा धर अक्ष-वी पर स्थि त है। ऊर्ध्वा धर अक्ष-वी 2D-श्रोणि काज और कंधेपुली
ब्लॉक-पी की पुली का सामान्य ऊर्ध्वा धर अक्ष है। ऊर्ध्वा धर अक्ष-वी को शुरुआत मेंकि सी व्यक्ति के लि ए
समायोजन करते समय धड़ क्लपिैं गं फ्रे म की लबं ाई को समायोजि त करने के लि ए बढ़ाया जा सकता है।
कंधेपुली ब्लॉक-पी कंधों के बीच व्यक्ति के पीछे स्थि त है। कंधेपुली ब्लॉक-पी से12 केबल दाएंहाथ के ड्राइव
एक्सोस्केलेटन के कंधे2D-हि ंग की पुली मेंजाती हैं। कंधेपुली ब्लॉक-पी सेअन्य 12 केबल बाएंहाथ के ड्राइव
एक्सोस्केलेटन के कंधे2D-हि ंग की पुली मेंजाती हैं।
लीवर-हि ंग सि स्टम HS है।
ऊर्ध्वा धर अक्ष-V की पुली लीवर-हि ंग सि स्टम-HS के माध्यम सेसमूह ड्राइव मॉड्यूल के फ्रेम मेंतय अक्ष-N
की पुली सेजुड़ी हुई हैं। V अक्ष और N अक्ष हमेशा समानांतर होतेहैं। प्रारंभि क स्थि ति : V अक्ष और N अक्ष
3D-कार्डन के 4 अक्ष के ऊपर लंबवत रूप सेस्थि त हैं।
लीवर-हि ंग सि स्टम-HS पुली के साथ 2D-हि ंग (अनुदैर्ध्य क्षैति ज अक्ष-PG और ऊर्ध्वा धर अक्ष-W के साथ) के
माध्यम सेV अक्ष को N अक्ष सेजोड़ता है। एक्सोस्केलेटन के सक्रि य 3D-नि लंबन के साथ लीवर-हि ंग
सि स्टम-HS ऊर्ध्वा धर अक्ष-V और अक्ष-N को वि परीत दि शाओंमेंलेजाता है।
समूह ड्राइव मॉड्यूल के बाएंऔर दाएंइलेक्ट्रि क मोटर-फ्लाईव्हील के आउटपुट पुली-B से, केबल का हि स्सा
अक्ष-N के नीचेसेसमाक्षीय शाफ्ट तक जाता है। समाक्षीय शाफ्ट समूह ड्राइव के सभी केबलों को पुली के
नि चलेश्रोणि समूह मेंइकट्ठा करतेहैं। (पैर केबल और कूल्हेके बैलेंसर की पुली)।
अक्ष-एन के ऊपर से, केबल पुली-पी (हाथों, उंगलि यों के केबल की पुली) के कंधेब्लॉक मेंजातेहैं।
टेलीप्रेजेंस सूट की पुली केबल को पुली के कई मोड़ों के लि ए लपेटनेकी अनुमति देती है, जि ससेपुली के जोड़े
गि यर अनुपात को बढ़ानेकी अनुमति देतेहैं।
केबल के लि ए क्लैम्पि ंग फ्रेम की लंबाई बदलनेके लि ए कम्पेंसेटर:
1. मैंनेजि स तंत्र का आवि ष्कार कि या है, वह क्लैम्पि ंग फ्रेम की लंबाई को समायोजि त करतेसमय केबल की
लंबाई को समायोजि त करता है
2. मैंनेजि न अन्य तंत्रों का आवि ष्कार कि या है, उनमेंक्लैम्पि ंग फ्रेम की लंबाई को समायोजि त करतेसमय
केबल की लंबाई को समायोजि त करनेकी आवश्यकता नहींहोती है
एक्सोस्केलेटन का 3डी-कार्डन
3D-CARDAN का अक्ष-1, 3D-CARDAN के अक्ष-2 के अर्धवृत्त के केंद्र मेंस्थि र पाइप-2 के अंदर घूमता है।
शुरुआत में, 3D-CARDAN का अक्ष-1 व्यक्ति के ऊपर होता है। 3D-CARDAN की अक्ष-1 रेखा व्यक्ति के
द्रव्यमान के केंद्र सेलंबवत चलती है।
3D-CARDAN का अक्ष-1, 3D-CARDAN के अक्ष-2 के लंबवत होता है। शुरुआत में, 3D-CARDAN के
अक्ष-2 का अर्धवृत्त और 3D-CARDAN का अक्ष-1 एक ही अनुप्रस्थ ऊर्ध्वा धर तल मेंहोतेहैं।
3D-CARDAN के अक्षों के अर्धवृत्त गोल कोनों वालेआधेवर्ग की तरह दि खतेहैं। 3D-CARDAN के AXIS-1
मेंअर्धवृत्त के बजाय L-आकार के लीवर के रूप मेंएक चौथाई रि ंग है। L-आकार का लीवर-L 3D-CARDAN के
AXIS-1 मेंलगा हुआ है
L-आकार का लीवर-L, 3D-CARDAN के AXIS-1 को पाइप-4 सेजोड़ता है, जि समें3D-CARDAN का
AXIS-4 घूमता है। 3D-CARDAN के L-आकार के लीवर-L AXIS-1 के ऊर्ध्वा धर भाग की तरफ एक
"पाइप-स्क्रू -नट स्लाइडि गं " ड्राइव है जो 3D-CARDAN के AXIS-4 को दोनों दि शाओं में45° के कोण पर
घुमाता है।
शुरुआत में, L-आकार का लीवर-L अनुदैर्ध्य ऊर्ध्वा धर तल मेंहोता है। शुरुआत में, 3D-CARDAN का
AXIS-4 व्यक्ति के पीछे अनुदैर्ध्य क्षैति ज अक्ष मेंस्थि त होता है। 3D-CARDAN की अक्ष रेखा-4 व्यक्ति के
द्रव्यमान के केंद्र को काटती है।
3D-CARDAN के स्थि र अक्ष-2 मेंशुरुआत मेंएक अनुप्रस्थ क्षैति ज अक्ष है। शुरुआत में, अक्ष का अर्धवृत्त एक
अनुप्रस्थ ऊर्ध्वा धर तल में2 3D-CARDAN है। 3D-CARDAN का अक्ष-2 अर्धवृत्त के सींगों के सि रों द्वारा
3D-CARDAN के अक्ष-3 के अर्धवृत्त के सींगों के सि रों सेधुरी पर जुड़ा हुआ है।
स्थि र अक्ष-3 3D-CARDAN व्यक्ति सेसबसेदूर, क्षैति ज रूप सेस्थि त है। 3D-CARDAN का अक्ष-3
टेलीप्रेजेंस सूट के फ़्लोर फ़्रेम के बीयरि ंग मेंघूमता है। 3D-CARDAN के सभी अक्ष व्यक्ति को नाभि पर
द्रव्यमान के केंद्र मेंकाटतेहैं।
3D-कार्डन के सेमी-रि ंग का नि र्मा ण
3D-कार्डन के सेमी-रि ंग मेंबलों की क्रि या की रेखाओंके साथ कार्बन फाइबर गोंद पर लि पटेएक कठोर फोम
धातुशामि ल है। फोम धातुअनुभाग के केंद्र मेंसि ग्नल और पावर कोएक्सि यल केबल के लि ए एक खांचा है।
केबल एक घूर्णन ट्रांसफार्मर मेंजातेहैंजो 3D-कार्डन के घूर्णन अक्षों के सर्कि ट को वि द्युत रूप सेजोड़ता है।
फोम धातुमेंदो लंबेहि स्सेहोतेहैं, जि सके साथ खांचेको मि लाया जाता है। खांचेमेंवि द्युत चुम्बकीय ढाल
वाले के बल रखे जाते हैं। उच्च वि द्यतु और चबंु कीय चालकता वाली फोम धातु एक वि द्यतु चम्ु बकीय ढाल है।
फोम धातुके दोनों हि स्सों को एक साथ चि पकाया जाता है। केबल अंदर है। कार्यक्रम के अनुसार, रोबोट तनाव
के साथ उच्च-मापांक कार्बन फाइबर के साथ फोम धातुको लपेटता है। आटोक्लेव।
3D-कार्डन के अक्ष-3 पर ट्रांजि स्टर क्लच के साथ 2,4 मीटर के व्यास वाले4 इलेक्ट्रि क फ्लाईव्हील मोटर हैं।
वेएंड्रॉइड के धड़ के 3D जाइरोस्कोप के साथ कोणीय प्रति क्रि या संकेत के अनुसार 3D-CARDAN के
AXES-2-3 को घुमातेहैं। 3D-CARDAN के प्रत्येक अक्ष के लि ए, वि परीत रोटेशन के दो इलेक्ट्रि क
फ्लाईव्हील मोटर्स, दो ट्रांजि स्टर क्लच हैं।
चेन ड्राइव-1 3D-CARDAN के AXIS-2 को 3D-CARDAN के AXIS-3 मेंदो इलेक्ट्रि क फ्लाईव्हील मोटर्स से
जोड़ता है।
चेन रोटेशन प्लेन के 90° के कोण पर रोटेशन के साथ चेन को 3-AXIS 3D-CARDAN मेंस्थानांतरि त करने
के लि ए, मैंनेक्रमि क रूप सेजुड़ेजि म्बल जोड़ों के आधार पर रोटेशन के दो वि मानों के साथ एक दो-प्लेन चेन
का आवि ष्कार कि या। एक एकल चेन लि कं जि समेंदो आशिं क रूप से इकट्ठे जि म्बल जोड़ होते हैंजो जि म्बल
जोड़ के ~ 1-3 व्यास की लंबाई वाली रॉड सेजुड़ेहोतेहैं।
चेन ड्राइव-2 3D-CARDAN के AXIS-1 को 3D-CARDAN के AXIS-3 पर दो इलेक्ट्रि क फ्लाईव्हील मोटरों
के साथ एक मध्यवर्ती स्प्रोकेट और चेन के माध्यम सेजोड़ता है
ट्रांजि स्टर क्लच एक इलेक्ट्रि क फ्लाईव्हील मोटर है जो एक ट्यबू के रूप मेंहोती है जि सके अदं र स्थायी चबंु क
चि पके होतेहैं। इलेक्ट्रि क फ्लाईव्हील मोटर के अंदर AXIS-3 3D-CARDAN के ड्राइव के लि ए तीन-चरण
वाइंडि गं वाला एक रोटर होता है
रोटर की तीन-चरण वाइंडि गं मेंप्रत्येक चरण वाइंडि गं मेंदो शॉर्ट-सर्कि टि गं (वर्तमान की दोनों दि शाओं में)
ट्रांजि स्टर होते हैं। गरै -शॉर्टेड स्टेटर वाइंडि गं फ्लाईव्हील रोटर से घमू ती नहीं है।
3D-CARDAN नि यंत्रण संकेत, एक साथ सभी रोटर वाइंडि गं को शॉर्ट (बदं ) करके , आपसी गति के कारण
इलेक्ट्रि क मोटर-फ्लाईव्हील के स्थायी चबंु कों से वि द्यतु चम्ु बकीय प्रेरण द्वारा प्रेरि त उनमेंएक करंट बनाता
है। वाइंडि गं मेंकरंट से चबंु कीय क्षेत्र फ्लाईव्हील रोटर को स्टेटर से जोड़ता है। यह जड़त्व-मक्ु त ट्रांजि स्टर
क्लच हैजि सका मैंनेआवि ष्कार कि या है। 0,02 सेकंड मेंचालूऔर बंद हो जाता है।
ट्रांजि स्टर क्लच का नि यत्रं ण सकं े त, फ्लाईव्हील-रोटर वाइंडि गं की आवत्तिृ और शॉर्ट-सर्कि ट अवधि को बदलते
हुए, स्टेटर के साथ फ्लाईव्हील-रोटर क्लच के 0-100% स्लि प (फि सलन) को सुचारू रूप सेनि यंत्रि त करता है।
ट्रांजि स्टर शॉर्ट-सर्कि ट करते हैं, वाइंडि गं खोलते हैं। सटीक क्लच नि यत्रं ण के लि ए, कै पेसि टर की एक लाइन
द्वारा वाइंडि गं करंट के सटीक हि स्सों को मापा जाता है।
संशोधन के बाद, ट्रांजि स्टर क्लच मेंपुनर्जी वि त बि जली का हि स्सा 3D-CARDAN की धुरी मेंDC केबल में
चला जाता है। 3D-CARDAN की सभी धुरी घूमतेहुए ट्रांसफार्मर और कुछ इलेक्ट्रि क फ्लाईव्हील मोटर्स में
ऊर्जा पुनर्जनन और अन्य इलेक्ट्रि क फ्लाईव्हील मोटर्स के त्वरण के कारण आपस मेंऊर्जा का आदान-प्रदान
करती हैं। एक बड़ी क्षमता वाला कैपेसि टर पुनर्जी वि त ऊर्जा का हि स्सा जमा करता है।
टेलीप्रेजेंस सूट में, वि परीत रोटेशन के 6 इलेक्ट्रि क फ्लाईव्हील मोटर्स, त्वरण और ब्रेकि ंग सेक्षण घर के फर्श
पर टॉर्क संचारि त कि ए बि ना 3D-CARDAN के तीन अक्षों को घुमातेहैं। 6 इलेक्ट्रि क फ्लाईव्हील मोटर्स एक
झुकाव सेंसर और एंड्रॉइड के शरीर के 3D जाइरोस्कोप के साथ कोणीय प्रति क्रि या के माध्यम सेएक व्यक्ति
को घुमातेहैं।
इलेक्ट्रि क मोटर-फ्लाईव्हील-1 (क्लच मोड) को ब्रेक करके पुनर्जी वि त ऊर्जा वि परीत रोटेशन के इलेक्ट्रि क
मोटर-फ्लाईव्हील-2 को गति प्रदान करती है। इलेक्ट्रि क मोटर-फ्लाईव्हील-2 के त्वरण सेक्षण भी एक व्यक्ति
को 3D-CARDAN मेंरोटेशन की उसी दि शा मेंघुमाता है। इलेक्ट्रि क मोटर-फ्लाईव्हील क्लच मोड से
इलेक्ट्रि क मोटर मोड मेंऔर इसके वि परीत स्वि च करतेहैं।
इलेक्ट्रि क मोटर्स-फ्लाईव्हील्स (क्लच मोड, बि यरि ंग्स की 100% दक्षता के साथ) के बीच ऊर्जा का
आदान-प्रदान सैद्धांति क रूप सेआपको ऊर्जा खर्च कि ए बि ना ओवरलोड के साथ कि सी भी दि शा मेंकि सी
व्यक्ति को घमु ाने की अनमु ति देता है। चरण वाइंडि गं के प्रेरक प्रति रोध को नि यत्रिं त करते समय ऊर्जा की
खपत कम होती है। इलेक्ट्रि क मोटर्स-फ्लाईव्हील्स की दक्षता रोटर, स्टेटर के प्रेरक प्रति रोधों का अनुपात है
"ऊर्जा पुनर्जनन के साथ त्वरण - मंदी" मोड (मेरेआवि ष्कार) में। कि सी व्यक्ति को कि सी भी दि शा मेंघुमानेके
लि ए टेलीप्रेजेंस सूट की ऊर्जा खपत को दस गुना कम करना संभव है।
3D-CARDAN ड्राइव का एंटीफ़ेज़ मोड
3D-CARDAN ड्राइव के क्लच अधि कतम पावर मोड मेंफीडबैक सि ग्नल के अनुसार अक्ष रोटेशन कोणों का
80% प्रदर्शन करतेहैं। सटीक स्टॉप मोड में 20%। सटीक स्टॉप मोड में, ड्राइव एंटीफ़ेज़ मोड मेंकाम करतेहैं।
एंटीफ़े ज़ मोड 3D-CARDAN को प्रत्येक ससें र पोलि गं अवधि मेंधीमा कर देता है ताकि कोण ड्राइव को
3D-CARDAN के कोणीय फीडबैक सि ग्नल मेंधीरे-धीरेसमायोजि त कि या जा सके। परि णामी कंपन को
सॉफ़्टवेयर द्वारा कम कि या जाता है, जो स्प्रि गं कपलि गं के त्वरण सकं े तों के अनसु ार शॉक एब्जॉर्बर को
नि यंत्रि त करता है।
बि जली बंद कर दी गई - टेलीप्रेजेंस सूट इलेक्ट्रि क फ्लाईव्हील मोटर्स की जड़ता से10 मि नट तक काम करता
है। इलेक्ट्रि क फ्लाईव्हील मोटर्स द्वारा ब्रेकि ंग टॉर्क की रि कवरी ऊर्जा बचाती है।
3D-कार्डन की स्वतंत्रता की डि ग्री का नुकसान
3D-कार्डन के अक्ष-1-3 एक साथ आए - हम स्वतंत्रता की एक डि ग्री खो देतेहैं। L-आकार के लीवर-L AXIS-1
3D-कार्डन मेंAXIS-4 3D-कार्डन को न खोनेके लि ए। 3D-कार्डन के AXIS-4 में, एक्सोस्केलेटन दोनों
दि शाओंमें45° के कोण पर घूमता है।
कार्डन कोण सि क्रं ोनाइज़ेशन टेबल 3D-कार्डन के AXIS-4 को 3D-कार्डन के AXIS-3 के साथ सि क्रं ोनस रूप से
घुमाता है।
AXES-1-3 3D-CARDAN नि कट आ रहेहैं, व्यक्ति को ऊर्ध्वा धर अक्ष मेंघुमाना आवश्यक है- AXIS-4
3D-CARDAN व्यक्ति को AXIS-3 3D-CARDAN के साथ समकालि क रूप सेकोण-X पर घुमाता है
ड्राइव द्वारा जि म्बल कोणों की सि क्रं ोनाइज़ेशन तालि का देती है:
1. 3D-CARDAN के AXIS-4 और AXIS-3 का कोण अंतर हमेशा 45° के कोण के बराबर होता है
2. 3D-CARDAN के AXIS-4 का न्यूनतम कोणीय त्वरण - कोणीय वेगों की जड़ता का पूर्वा नुमान
3. मानव शरीर के घूर्णन के तीन अक्षों मेंकोण और कोणीय वेग संकेत सेन्यूनतम वि चलन
सक्रि य 3D एक्सोस्केलेटन सस्पेंशन
3D-CARDAN के AXIS-1 और 3D-CARDAN के AXIS-4 का संतुलन कि सके द्वारा कि या जाता है धड़ के
एक्सोस्केलेटन का एक सक्रि य 3D-नि लंबन, एक व्यक्ति को सभी दि शाओंमें15 सेमी तक लेजाता है, उसके
द्रव्यमान के केंद्र को 3D-कार्डन के अक्षों के केंद्र सेजोड़ता है। प्रत्येक नि र्देशांक अक्ष मेंसक्रि य 3D-नि लंबन की
हरकतेंनि र्देशांक अक्ष की दोनों दि शाओंमेंस्प्रि ंग्स द्वारा संतुलि त होती हैं।
एक उच्च गति ड्राइव के साथ एक सक्रि य 3D नि लंबन एक व्यक्ति को अंतरि क्ष के तीन अक्षों में15 सेमी तक
की दूरी पर रैखि क रूप सेघुमाता है, दौड़तेसमय पैर पर अभि नय करनेवालेरैखि क त्वरण, कंपन को एक
व्यक्ति तक पहुंचाता है; मार्शल आर्ट मेंवार और धक्का, बुलेटप्रूफ जैकेट पर स्वचालि त फायर, कवच पर
तलवार और भालेसेवार, कक्षा सेअंतरि क्ष यात्री का उतरना, रैली और मोटोक्रॉस मेंसभी 3D त्वरण का
अनुकरण करता है…
कोणीय त्वरण 3D-कार्डन द्वारा अनुकरण कि ए जातेहैंएक्सोस्केलेटन का सक्रि य 3D-नि लंबन समुद्री बीमारी
की सभं ावना को कम करता है। एक्सोस्के लेटन का सक्रि य 3D नि लबं न धड़ क्लपिैं गं फ्रे म की लबं ाई नि र्धा रि त
करनेमेंशामि ल है।
एक्सोस्केलेटन के आगे-पीछे होनेसेउत्पन्न होनेवालेप्रति क्रि याशील प्रति क्षेप बल की भरपाई ग्रुप ड्राइव
मॉड्यलू द्वारा की जाती है। एक्सोस्के लेटन को दो सि क्रं ोनस स्क्रू ड्राइव "इलेक्ट्रि क मोटर-फ्लाईव्हील + क्लच
+ स्क्रू-नट स्लि प" द्वारा आगे-पीछे कि या जाता है। ऊपरी स्क्रू ड्राइव को ग्रुप ड्राइव मॉड्यूल के ऊपरी हि स्सेमें
पीछे के सि रेके साथ लगाया जाता है। नि चलेस्क्रू ड्राइव को ग्रुप ड्राइव मॉड्यूल के नि चलेहि स्सेमेंपीछे के सि रे
के साथ लगाया जाता है।
ग्रुप ड्राइव मॉड्यूल के इलेक्ट्रि क मोटर-फ्लाईव्हील की पुली सेसभी केबल अक्ष-N की पुली तक जाती हैं।
इलेक्ट्रि क फ्लाईव्हील मोटर और-N अक्ष की धुरी परस्पर स्थि र, समानांतर और ग्रुप ड्राइव मॉड्यूल के फ्रेम में
स्थि त होती हैं। ग्रुप ड्राइव मॉड्यूल के फ्रेम में, -N अक्ष मानव पक्ष पर स्थि त होता है।
-N अक्ष सेआउटपुट केबल -N अक्ष के समानांतर -N2 अक्ष की पुली तक जाती हैं। -N2 अक्ष की पुली से,
केबल V अक्ष की पुली तक जाती हैं।
एक्सोस्केलेटन का सक्रि य 3D-नि लंबन संचालन मेंहै:
एक्सोस्केलेटन और समूह ड्राइव मॉड्यूल अनुदैर्ध्य क्षैति ज अक्ष-X के साथ गाइड मेंवि परीत दि शाओंमेंचलते
हैं। -V अक्ष और N अक्ष हमेशा अनुदैर्ध्य क्षैति ज-X अक्ष पर रहतेहैं। पुली के साथ -N2 अक्ष केवल V अक्ष और
N अक्ष पर धुरी पर स्थि र होता है। -N अक्ष की पुली सेकेबल -N2 अक्ष की पुली में, फि र -V अक्ष की पुली में
जाती हैं।
-N2 अक्ष हर समय दोनों दि शाओंमें, दाईं ओर और बाईं ओर गति करता है। V-अक्ष और N-अक्ष करीब और
दूर जातेहैं। प्रारंभि क स्थि ति में, एक्सोस्केलेटन का सक्रि य 3D-नि लंबन अक्ष-N2 को एक सीधी रेखा-1 में
दाएं-बाएंघुमाता है, जो 3D-कार्डन के अक्ष-4 के सापेक्ष स्थि र होता है। सीधी रेखा-1 मेंगति स्थानि क फ्रेम-4 में
तय कि ए गए एक काज तंत्र द्वारा प्रदान की जाती है। फ्रेम-4 को 3D-कार्डन के अक्ष-4 मेंवेल्डेड कि या गया है।
ग्रुप ड्राइव मॉड्यूल फ्रेम-5 पर लगा होता है। फ्रेम-5 फ्रेम-4 के दो गाइड के साथ चलता है।
एक्सोस्केलेटन के सक्रि य 3D-नि लंबन द्वारा फीडबैक सि ग्नल के सटीक संचरण के लि ए, टेलीप्रेजेंस सूट के
द्रव्यमान का केंद्र अपनी जगह पर बना रहना चाहि ए। फ्रेम-4 सेएक्सोस्केलेटन और उसके काउंटरवेट को
आनुपाति क दूरी पर वि परीत दि शाओंमेंवि स्तारि त होना चाहि ए।
The reactive recoil force from the up-and-down movement of the exoskeleton is
compensated by counterweights-P1-P2 from behind the back above the shoulders.
The reactive recoil force from the movement of the exoskeleton to the right and left is
compensated by counterweights-T1-T2 behind the back on the right, on the left of the waist.
काउंटरवेट-P1-P2 मेंएक अलग स्क्रू ड्राइव "इलेक्ट्रि क मोटर-फ्लाईव्हील + क्लच + स्लाइडि गं स्क्रू -नट" है।
काउंटरवेट T1-T2 मेंएक अलग स्क्रू ड्राइव "इलेक्ट्रि क मोटर-फ्लाईव्हील + क्लच + स्लाइडि गं स्क्रू -नट" है।
काउंटरवेट-P1-P2, काउंटरवेट-T1-T2 को एक्सोस्केलेटन और फ्रेम-4 सेप्रति कर्षि त कि या जाता है, जो
3D-कार्डन के AXIS-4 मेंतय कि या जाता है। फ्रेम-4 एक्सोस्केलेटन के सक्रि य 3D-नि लंबन की स्ट्रोक लंबाई
के साथ सभी अक्षों पर सटीक प्रति क्रि या प्रदान करता है।
त्वरण अनुसूची और काउंटरवेट का वजन इस तरह सेचुना जाता हैकि सक्रि य 3D-नि लंबन चालूहोनेपर
फ्रेम-4 स्थि र हो।
चलते-फि रतेव्यक्ति के पैर पर भार का अनुकरण जब दाहि ना पैर जमीन पर आता है, तो इसकी ड्राइव व्यक्ति के दाहि नेपैर को ऊपर और पीछे फेंकती है, फि र
आसानी सेपीछे की ओर।
स्ट्रोक की लंबाई की कमी के साथ, एक्सोस्केलेटन का सक्रि य 3D-नि लंबन दि शा-1 मेंछोटेतेज शॉक कंपन
पल्स की एक श्रखंृ ला के साथ लबं े समय तक त्वरण का अनकु रण करता है। रि वर्स चरण मेंप्रत्येक पल्स में,
एक्सोस्केलेटन का सक्रि य 3D-नि लंबन व्यक्ति को लगातार ब्रेकि ंग त्वरण के साथ धीरे-धीरेवि परीत दि शा में
लेजाता है। फि र, एक तेज त्वरण के साथ, यह एक व्यक्ति को एक और शॉक पल्स संचारि त करता है।
एक्सोस्केलेटन सक्रि य 3D नि लंबन नि यंत्रण संकेत
एक्सोस्केलेटन का सक्रि य 3D नि लंबन एंड्रॉइड के धड़ के त्वरण चैनल सेसंकेत द्वारा नि यंत्रि त होता है।
सक्रि य 3D नि लंबन ड्राइव मेंमानव धड़ एक्सोस्केलेटन के तीन 3D त्वरण सेंसर सेअति रि क्त प्रति क्रि या है।
अति रि क्त प्रति क्रि या एंड्रॉइड के धड़ त्वरण चैनल के संकेत के लि ए सभी संख्याओंको समायोजि त करती है।
एंड्रॉइड के शरीर त्वरण चैनल का संकेत
एंड्रॉइड के बाएंकंधेके त्वरण-एल का सेंसर-एल त्वरण वेक्टर-एल के कोणीय नि र्देशांक का परि माण देता है।
एंड्रॉइड के दाएंकंधेके त्वरण-पी का सेंसर-पी त्वरण वेक्टर-पी के कोणीय नि र्देशांक का परि माण देता है।
सॉफ्टवेयर की गणना करतेसमय, त्वरण वेक्टर-एल-पी को सेंसर-एल को सेंसर-पी सेजोड़नेवालेखंड के केंद्र
मेंबि दं -ु सी पर लागू कि या जाता है। एंड्रॉइड सॉफ्टवेयर कु ल वेक्टर-एलपी की गणना करता है। वक्ै टर का योग
एंड्रॉइड के XYZ नि र्देशांक प्रणाली के प्रत्येक अक्ष पर अलग-अलग वैक्टर के प्रक्षेपण का अनुसरण करता है।
फि र बि दं -ु सी को बि दं -ु सीएम से गजु रने वाली एक ऊर्ध्वा धर रेखा द्वारा बि दं -ु एच से जोड़ा जाता है। बि दं -ु सीएम
एंड्रॉइड के धड़ और श्रोणि के द्रव्यमान का केंद्र है। बि दं -ु एच पर एक त्वरण ससें र-एच है। ससें र-एच एंड्रॉइड हि प
बैलेंसर के केंद्रीय काज पर स्थि त है।
बि दं -ु CM पर, सॉफ्टवेयर त्वरण वेक्टर-LP- को त्वरण वेक्टर-H के साथ जोड़कर कु ल वेक्टर-LPN प्राप्त
करता है। जोड़नेसेपहले, त्वरण वेक्टर-H के परि माण को गुणांक-K सेगुणा कि या जाता है। गुणांक-K खंड
"बि दं -ु C - बि दं -ु CM" की लबं ाई और खडं "बि दं -ु CM - बि दं -ु H" की लबं ाई का अनपु ात है।
कुल वेक्टर-LPN का परि माण, कोणीय नि र्देशांक - एंड्रॉइड के त्वरण चैनल का संकेत है। संकेत एक्सोस्केलेटन
के सक्रि य 3D-नि लंबन की ड्राइव पर जाता है।
सक्रि य 3D-एक्सोस्केलेटन सस्पेंशन का AI
एक्सोस्केलेटन के सक्रि य 3D-सस्पेंशन की अधि कतम स्ट्रोक लंबाई 15 सेमी है। आमतौर पर सक्रि य
3D-सस्पेंशन मध्य स्थि ति मेंहोता है, जो स्ट्रोक की लंबाई को आधा कर देता है। एंड्रॉइड की स्टीरि यो-पि क्चर
का उपयोग करके AI एक्सोस्केलेटन के सक्रि य 3D-सस्पेंशन की स्ट्रोक लंबाई को बढ़ाता हैताकि एंड्रॉइड के
रैखि क शॉक त्वरण का एक व्यक्ति तक लंबेसमय तक संचरण हो सके।
एंड्रॉइड आगेबढ़ता है- सक्रि य 3D-सस्पेंशन एक व्यक्ति को आगेबढ़ाता है, जि ससेएंड्रॉइड के अचानक ब्रेक
लगानेके सि मुलेशन मेंसक्रि य 3D-सस्पेंशन के ब्रेकि ंग स्ट्रोक की लंबाई बढ़ जाती है।
लंबेत्वरण के लि ए, टेलीप्रेजेंस सेंट्रीफ्यूज सूट वास्तवि क रूप सेएक आभासी ग्रह के बढ़ेहुए गुरुत्वाकर्षण का
अनुकरण करता है।
स्टीरि यो चि त्र में, एंड्रॉइड नीचेगि रता है- एक्टि व 3डी-सस्पेंशन व्यक्ति को नीचेलेजाता है, जि ससेएक्टि व
3डी सस्पेंशन के ब्रेकि ंग स्ट्रोक की लंबाई बढ़ जाती है- जब एंड्रॉइड गि रता हैतो व्यक्ति पर प्रभाव का
स्थानांतरण होता है।
ए.आई. एक्सोस्केलेटन के एक्टि व 3डी सस्पेंशन की स्ट्रोक लंबाई बढ़ानेके लि ए जड़त्वीय नेवि गेशन सि स्टम
मोड मेंएंड्रॉइड त्वरण सेंसर का उपयोग करता है।
एक्सोस्केलेटन के एक्टि व 3डी-सस्पेंशन के सेटि ंग मोड:
1. फीडबैक सि ग्नल मोड
2. शून्य गुरुत्वाकर्षण मोड: रोटेशन का केंद्र कि सी व्यक्ति के द्रव्यमान के केंद्र के साथ मेल खाता है
3. संतुलन मोड: एक्टि व 3डी-सस्पेंशन की ड्राइव मानव आंदोलनों सेजि म्बल अक्षों के हानि कारक असंतुलन के
टॉर्क को हटाती है, नि यंत्रण मेंदेरी को कम करती है, ऊर्जा की बचत करती है
शून्य गुरुत्वाकर्षण मोड में, एक्सोस्केलेटन का सक्रि य 3D सस्पेंशन नि र्णय तालि काओंके अनुसार हाथों और
पैरों की स्थि ति बदलतेसमय जि म्बल के केंद्र को व्यक्ति के द्रव्यमान के केंद्र सेजोड़ता है। उदाहरण: जब
कि सी व्यक्ति को समूहबद्ध कि या जाता है, तो उसका द्रव्यमान केंद्र धड़ सेआगेकी ओर बढ़ता है- एक
सक्रि य 3D सस्पेंशन व्यक्ति को पीछे की ओर लेजाता है, व्यक्ति के द्रव्यमान केंद्र को कार्डन के केंद्र से
जोड़ता है।
आभासी वास्तवि कता में, सॉफ़्टवेयर त्वरण वेक्टर और गुरुत्वाकर्षण वेक्टर के वेक्टर योग द्वारा मानव
आंदोलन की गणना करता है।
3D-कार्डन के अक्ष-2 का संतुलन
घूर्णन की ऊर्जा खपत को कम करनेके लि ए, 3D-कार्डन का अक्ष-2, 3D-कार्डन के अक्ष-2 के अर्ध-वलय के
दोनों सींगों के सि रों पर लगेदो काउंटरवेट लीवर को संतुलि त करता है। काउंटरवेट - काउंटरवेट लीवर के अंत
मेंदो स्क्रू ड्राइव।
लीवर-काउंटरवेट, एक दूसरेसेहि गं ेड अक्षों द्वारा श्रखंृ ला मेंजड़ु े दो लीवरों की समान क्लम्पिै गं की चेन क्लपैं
योजना के अनुसार। हि ंगेड अक्षों पर स्क्रू ड्राइव केबल के साथ पुली हैं।
काउंटरवेट लीवर के अंत में, दो इलेक्ट्रि क फ्लाईव्हील मोटर स्क्रू ड्राइव को घुमातेहैंजो काउंटरवेट लीवर के
केबल को घुमातेहैं। 3D-CARDAN के अक्ष-2 को संतुलि त करना शून्य असंतुलन के सि द्धांत पर आधारि त
नहींहै, बल्कि इस सि द्धांत पर आधारि त है: असंतुलन 3D-CARDAN के अक्षों को नि यंत्रि त करनेमेंदेरी को
कम करता है
समान क्लैम्पि ंग चेन क्लैंप
चेन क्लपैं के लीवर लि कं -1-2-3-4-5 के बल मेंताकत के मानक के अनसु ार कि सी व्यक्ति के हाथ, परै और धड़
को जकड़ेंगे। लीवर-लि कं पर के बल के सेक्टर पलु ी का बड़ा व्यास 1 है। लीवर-लि कं -2 पर, के बल के सेक्टर पलु ी
का व्यास लीवर-लि कं -1-2 की कु ल लबं ाई लीवर-लि कं -1 की लबं ाई से कई गनु ा कम है।
शषे लीवर लि कं के सेक्टर पलु ी के व्यास के लि ए कु ल लबं ाई का एक समान अनपु ात एक सामान्य के बल के
साथ हाथ (परै ) के लि ए चेन क्लपैं के प्रत्येक लीवर लि कं के लि ए समान क्लम्पिै गं बल देता है (स्प्रि गं दसू रे
सामान्य के बल के माध्यम से लीवर लि कं को छोड़ता है)। एकसमान क्लम्पिै गं की चेन क्लपैं कि सी भी आकार
की सलं ग्न सतह के सभी बि दं ओु ं को समान बल से जकड़ती है।
ड्राइव एक स्प्रि ंग लीवर तंत्र के माध्यम सेआम केबल को क्लैम्पि ंग बल की प्रगति शील वि शेषता (जैसे
क्रॉस-कं ट्री मोटरसाइकि ल का रि यर सस्पेंशन) के साथ ले जाती है। प्रत्येक लीवर-लि कं अपने इन्फ्लेटेबल
सेगमेंट को कि सी भी आकार के हाथ (पैर) के चारों ओर लपेटेगा।
हाथ (पैर) के चारों ओर लपेटा हुआ, चेन क्लैंप का अंत अपनेदांतों के साथ क्लैम्पि ंग फ्रेम के केंद्रीय बीम के
दांतों सेजुड़ता है। कि सी भी आकार के हाथ (पैर) की गोलाकार परि धि + इन्फ्लेटेबल सेगमेंट मेंदबाव एंड्रॉइड
को नि यंत्रि त करनेमेंन्यूनतम देरी देता है।
पुरुष के हाथ कोहनी क्लैंप फ्रेम मेंआर्मरेस्ट मेंहैं। कोहनी क्लपिैं गं फ्रे म ससें र की ताकत के अनसु ार, ड्राइव
फोरआर्म क्लैम्पि ंग फ्रेम की लंबाई नि र्धा रि त करेगा। फोरआर्म नि चलेजोड़ पर क्लैंप को जकड़ लेगा।
ट्रंक क्लैम्पि ंग फ्रेम की लंबाई नि र्धा रि त करना
धड़ क्लैम्पि ंग फ्रेम के कंधेसेंसर की ताकत के अनुसार, ड्राइव इसकी लंबाई नि र्धा रि त करता है। हेलि कल गि यर
साइड की ओर बढ़ता है, कंधेगाइड के साथ पकड़तेहैं।
साइड क्लैंप - गोल कोनों के साथ एक सपाट प्लेट-1। प्लेट-1 पीठ के तल के समानांतर एक क्षैति ज अक्ष-1 में
घूमती है। फि र, अक्ष-1 के साथ चलतेहुए, इसेट्रंक के कि नारेएक स्क्रू ड्राइव द्वारा दबाया जाता है। अक्ष-1
ड्राइव स्क्रू है।
कंधेकी चेन क्लि प कंधों तक उतरती हैं। वेएक स्क्रू ड्राइव के साथ धड़ को सामनेसेनि चली पसली तक
जकड़तेहैं। पेल्वि क क्लैम्पि ंग फ्रेम के क्लैंप धड़ के नि चलेक्लैंप की जगह लेतेहैं।
लीवर लि कं -1-2-3-4 चेन क्लपैं के बल मेंबल के मानक के अनसु ार श्रोणि को जकड़ देगा। पेल्वि क क्लम्पिै गं
फ्रेम का बायाँचेन क्लैम्प, 30 ° के कोण पर दाईं ओर झुकतेहुए, श्रोणि की ऊपरी बाईं पार्श्व हड्डी के सामने
की ओर सेश्रोणि को जकड़ लेगा। इसी तरह दाईं ओर भी।
हैंड ड्राइव
आर्म ड्राइव एक्सोस्केलेटन के केबल दाएंआर्म ड्राइव एक्सोस्केलेटन के कंधेके जोड़ के क्षैति ज अनुदैर्ध्य (कि सी
व्यक्ति से) अक्ष के पुली-1 मेंजातेहैं, फि र दाएंआर्म एक्सोस्केलेटन के कंधेके जोड़ के क्षैति ज अनुप्रस्थ अक्ष
के पुली-2 मेंआगेबढ़तेहैं। पुली-2 से, केबल पीछे-नीचे(हाथ लंबवत नीचे) पुली-3 मेंजातेहैं, जि समेंदाएंहाथ
के अग्रभाग के क्लैम्पि ंग फ्रेम के मध्य भाग के पीछे (9 सेमी) समानांतर अक्ष होता है।
पुली-3 से, केबल आगे-नीचे(खड़ेव्यक्ति सेक्षैति ज रूप से) पुली-4 मेंजातेहैं, जि समेंदाएंकोहनी के क्लैम्पि ंग
फ्रेम के ऊपरी भाग मेंअक्ष-4 होता है। अक्ष-3-4 को जोड़नेवाला लीवर-34 अक्ष-2-3 को जोड़नेवालेलीवर-23
की लंबाई के बराबर है। फोरआर्म क्लैम्पि ंग फ्रेम का ऊपरी हि स्सा कंधेपर एक अलग अक्ष मेंलीवर-23 सेजुड़ा
होता है।
फोरआर्म के क्लैम्पि ंग फ्रेम का नि चला हि स्सा लीवर-23 सेचर लंबाई के लीवर-आर द्वारा जुड़ा होता है।
लीवर-आर एक लंबेनट के अंदर एक छोटा पेंच है। एक लंबेनट के साथ एक वायवीय टरबाइन टेलीप्रेजेंस सूट
की शुरुआत सेपहलेफोरआर्म क्लैम्पि ंग फ्रेम की स्थि ति को कोहनी क्लैम्पि ंग फ्रेम की स्थि ति मेंसमायोजि त
करता है। जब टेलीप्रेजेंस सूट काम कर रहा होता है, तो वायवीय टरबाइन आमतौर पर काम नहींकरता है।
इन्फ्लेटेबल क्लपैं: बाहरी कक्ष-2 के अदं र कक्ष-1। कै मरा-1 क्लपिैं गं कक्ष के क्लपिैं गं बल को समायोजि त
करता है। कै मरा-2 क्लपिैं गं फ्रे म के क्लपैं के वेंटि लेशन सि स्टम के वायु प्रवाह को नि यत्रिं त करता है। कक्ष-2 में
कई वायु छि द्र हैं। एरोपेनोप्लास्ट (फोम ग्लास) से बने क्लपिैं गं फ्रे म अनदु ैर्ध्य और अनप्रु स्थ रूप से कार्बन
फाइबर सेलि पटेहोतेहैं: न्यूनतम जड़ता।
चर-लबं ाई वाला लीवर-आर अग्रबाहु के क्लपिैं गं फ्रे म को लीवर-23 से जोड़ता है ताकि अग्रबाहु, कोहनी और
हाथ के क्लपिैं गं फ्रे म की लबं ाई को समायोजि त कि या जा सके ।
अग्रबाहु, कोहनी, हाथ के क्लैम्पि ंग फ्रेम की लंबाई को फि ट करनेके तत्व:
1. इन्फ्लेटेबल फोरआर्म क्लैम्प के फ्रेम को फोरआर्म के क्लैम्पि ंग फ्रेम सेजोड़नेवाला स्प्रि ंग-लोडेड
पैरेललोग्राम मैकेनि ज्म
2. इन्फ्लेटेबल एल्बो क्लैम्प के फ्रेम को एल्बो क्लैम्पि ंग फ्रेम सेजोड़नेवाला स्प्रि ंग-लोडेड पैरेललोग्राम
मैकेनि ज्म
लीवर-आर पर कोई ड्राइव टॉर्क नहींहै। सभी लीवर मानव मांसपेशि यों के बल (छोटेबल) द्वारा संचालि त होते
हैं, जो बांह के एक्सोस्केलेटन के टि का के अक्षों के साथ बांह के जोड़ों के अक्षों के बेमेल होनेकी भरपाई करतेहैं, अग्रबाहु, कोहनी और हाथ के क्लैम्पि ंग फ्रेम के बीच की दूरी मेंहोनेवालेबदलावों की भरपाई करतेहैं। इसी
तरह, अक्षों के बेमेल होने, जांघ, पि डं ली और परै के क्लम्पिै गं फ्रे म के बीच की दरू ी के माप की भरपाई की जाती
है। ड्राइव टेलीप्रेजेंस सूट के क्लैम्पि ंग फ्रेम को केवल एक क्षण, एक कोण देता है।
पुली-4 से, केबल पुली-5 मेंनीचेजाती हैं(अक्ष पुली-4 की अक्ष के समानांतर है), जो दाहि नेहाथ के क्लैम्पि ंग
फ्रेम के नि चलेकोहनी जोड़ पर स्थि त है। पुली-5 से, केबल पुली-6 मेंजाती हैं, जि सकी अक्ष कोहनी के अनुदैर्ध्य
अक्ष के समानांतर होती है।
पुली-6 की अक्ष कोहनी क्लैम्पि ंग फ्रेम के नि चलेहि स्सेमेंतय होती है। पुली-6 सेकेबल दाहि नी कोहनी के
क्लैम्पि ंग फ्रेम के नि चलेकोहनी जोड़ की पुली-7 (समानांतर अक्ष) मेंजाती हैं।
अक्ष-7 पुली-7 कूल्हेकी तरफ (व्यक्ति खड़ा है) अक्ष-6 पुली-6 की तुलना मेंकूल्हेके करीब स्थि त है।
अक्ष-5-6-7 वेदाहि नेहाथ की कोहनी के क्लैम्पि ंग फ्रेम द्वारा एक कठोर संरचना मेंजुड़ेहुए हैं। पुली-7 से,
केबल पुली-8 मेंजाती हैं, जि सकी अक्ष-8 अक्ष-7 के लंबवत स्थि त होती है, जो इस तल के ऊपर हथेली के ऊपरी
हि स्सेके तल के समानांतर होती है। पुली-8 की धुरी-8 एक्सोस्केलेटन दस्तानेके क्लैम्पि ंग फ्रेम मेंतय की
जाती है।
पुली-8 से, केबल हाथ की उंगलि यों के फालंजेस-1 के क्लैम्पि ंग फ्रेम मेंऔर उंगली के एक्सोस्केलेटन के
थि म्बल मेंजाती हैं।
पैरों के एक्सोस्केलेटन की लीवर प्रणाली पैरों के पीछे होती हैताकि बाहों की गति मेंबाधा न आए।
14 केबल (दाएंफ्लाईव्हील के 7 केबल + बाएंफ्लाईव्हील के 7 केबल) श्रोणि के क्लैम्पि ंग फ्रेम के केंद्रीय
झुकाव (45 डि ग्री के कोण पर आगे-ऊपर झुकाव) अक्ष की पुली को घुमातेहैं, जि स पर पैरों के एक्सोस्केलेटन
दाएंऔर बाएंतय होतेहैं। एंड्रॉइड में, श्रोणि की भूमि का हि प बैलेंसर द्वारा नि भाई जाती है।
दाएंऔर बाएंहाथ और पैरों के ड्राइव के फ्लाईव्हील, प्रति क्रि याशील क्षणों और 3D-CARDAN के AXIS-1 के
रोटेशन की भरपाई करनेके लि ए वि परीत दि शा मेंघूमतेहैं।
मानव उपयोगकर्ता के कंधेकी तरफ से, टेलीप्रेजेंस सूट के दाएंइलेक्ट्रि क मोटर-फ्लाईव्हील दक्षि णावर्त घूमते
हैं, बाएंइलेक्ट्रि क मोटर-फ्लाईव्हील वामावर्त घूमतेहैंताकि फ्लाईव्हील का क्षण चलने, दौड़नेके दौरान
एक्सोस्केलेटन को सही दि शा मेंघुमाए।
कूल्हेका क्लैम्पि ंग फ्रेम श्रोणि के क्लैम्पि ंग फ्रेम सेएक तंत्र द्वारा जुड़ा हुआ हैजि सेमैंनेकेबल पुली के साथ
आवि ष्कार कि या हैजो ऊर्ध्वा धर, क्षैति ज (पीछे की ओर झुकाव के साथ), अनुप्रस्थ सुतली की अनुमति देता है।
दाहि नेकूल्हेके क्लैम्पि ंग फ्रेम के काज (अनुप्रस्थ क्षैति ज अक्ष) की पुली-एच 1 से, केबल लीवर-एच12 मेंतय
अक्ष-एच2 मेंपुली-एच2 (समानांतर अक्ष) मेंपीछे-नीचेजाती हैं।
दाहि नेकूल्हेके क्लैम्पि ंग फ्रेम के काज (अनुप्रस्थ क्षैति ज अक्ष) की पुली-एच2 से, केबल लीवर-एच23 मेंतय
अक्ष-एच3 (घुटनेपर) मेंपुली-एच 3 (समानांतर अक्ष) मेंआगे-नीचेजाती हैं। अक्ष-2-3 को जोड़नेवाला
लीवर-एच23 अक्ष-1-2 को जोड़नेवालेलीवर-एच12 की लंबाई के बराबर है। हि प क्लैम्पि ंग फ्रेम का ऊपरी
हि स्सा जांघ के ऊपरी हि स्सेमेंएक अलग अक्ष मेंलीवर-H12 सेजुड़ा होता है।
हि प क्लैम्पि ंग फ्रेम का नि चला हि स्सा लीवर-H 12 सेचर लंबाई के लीवर-HR (एक लंबेनट के अंदर एक छोटा
पेंच) द्वारा जुड़ा होता है। बेयरि ंग मेंएक लंबेनट को वायवीय टरबाइन द्वारा घुमाया जाता है, जो टेलीप्रेजेंस
सूट की शुरुआत सेपहलेहि प क्लैम्पि ंग फ्रेम की स्थि ति को शि न क्लैम्पि ंग फ्रेम की स्थि ति मेंसमायोजि त
करता है।
जब टेलीप्रेजेंस सूट काम कर रहा होता है, तो वायवीय टरबाइन आमतौर पर काम नहींकरता है। चर-लंबाई
वाला लीवर-HR हि प क्लम्पिै गं फ्रे म को लीवर-H12 से जोड़ता है ताकि जांघ, पि डं ली, परै के क्लम्पिै गं फ्रे म की
लंबाई को समायोजि त कि या जा सके।
जांघ, पि डं ली, परै के क्लम्पिै गं फ्रे म की लबं ाई को फि ट करने के तत्व:
1. एक स्प्रि ंग-लोडेड पैरेललोग्राम तंत्र इन्फ्लेटेबल हि प क्लैम्प के फ्रेम को हि प क्लैम्पि ंग फ्रेम सेजोड़ता है
2. एक स्प्रि ंग-लोडेड पैरेललोग्राम तंत्र इन्फ्लेटेबल शि न क्लैम्प के फ्रेम को शि न क्लैम्पि ंग फ्रेम सेजोड़ता है
लीवर-एनआर पर कोई ड्राइव टॉर्क नहींहै। सभी लीवर मानव मांसपेशि यों के बल (छोटेबल) द्वारा चलतेहैं,
जो पैर के एक्सोस्केलेटन के जोड़ों की कुल्हाड़ि यों के साथ पैर के जोड़ों की कुल्हाड़ि यों के बेमेल होनेकी भरपाई
करते हैं, जांघ, पि डं ली, परै के क्लम्पिै गं फ्रे म के बीच की दरू ी मेंबदलाव की भरपाई करते हैं।
लीवर-एच23 अक्ष-3 (घुटनेपर) लीवर-एच34 सेजुड़ता है। लीवर-एच34 अक्ष-4 पैरों के क्लैम्पि ंग फ्रेम से
जड़ु ता है। पि डं ली के ऊपरी हि स्से को पि डं ली के शीर्ष पर एक अलग अक्ष मेंलीवर-H34 से जोड़ा जाता है।
धड़ के क्लैम्पि ंग फ्रेम पर अपनी पीठ के साथ, एक व्यक्ति श्रोणि के क्लैम्पि ंग फ्रेम की काठी में, कूल्हों के
क्षैति ज रूप सेस्थि त क्लैम्पि ंग फ्रेम मेंबैठता है। अपनी कोहनी को आर्मरेस्ट (कोहनी क्लैम्पि ंग फ्रेम) मेंरखता
है, हरेबटन को दबाता है। एक व्यक्ति की उंगलि यों, हाथों और पैरों के क्लैम्पि ंग फ्रेम के इन्फ्लेटेबल क्लैम्प
हवा को आधेकाम के दबाव तक फुलातेहैं।
मानव जोड़ों की कुल्हाड़ि यों और क्लैम्पि ंग फ्रेम के टि का को एक ड्राइव (वायवीय टरबाइन + स्क्रू-नट) के साथ
जोड़नेके लि ए तंत्र क्लैम्पि ंग फ्रेम की लंबाई को समायोजि त करेगा, उन्हेंव्यक्ति के व्यक्ति गत आयामों में
समायोजि त करेगा। फि र उंगलि यों, हाथों, पैरों के क्लैम्पि ंग फ्रेम के इन्फ्लेटेबल क्लैम्प की हवा को फुलातेहुए।
क्लैम्पि ंग फ्रेम 4 तरफ सेहाथ (पैर) को स्थि र (फ्रेम से) सहारा देतेहैं।
पैर एक्सोस्केलेटन
फुट क्लैम्पि ंग फ्रेम के सेंसर की ताकत के अनुसार, ड्राइव पैर क्लैम्पि ंग फ्रेम के जूतेको मानव पैर पर दबाता है,
जि ससे पि डं ली क्लम्पिै गं फ्रे म की लबं ाई नि र्धा रि त होती है। पि डं ली को जोड़ों पर क्लपैं द्वारा क्लपैं कि या जाता
है। जूता पैर को ऊपर से, कि नारों पर ढकता है।
फुट क्लैम्पि ंग फ्रेम का ड्राइव सेंसर की ताकत तक अपनेजूतेसेपैर को पीछे की एड़ी के स्टॉप पर दबाता है।
नि चलेपैर के क्लैम्पि ंग फ्रेम के सेंसर की ताकत के अनुसार, ड्राइव जांघ के क्लैम्पि ंग फ्रेम की लंबाई नि र्धा रि त
करेगा। कूल्हेको जोड़ों पर क्लैंप द्वारा क्लैंप कि या जाएगा।
टेलीप्रेजेंस सूट के सभी क्लैंप ड्राइव एक वायवीय टरबाइन + एक स्क्रू-नट (आयताकार धागा) हैं। वायवीय
टर्बा इन क्लैंप वेंटि लेशन सि स्टम के 1 एटीएम सेहवा लेतेहैं। सूखी हवा बाहों, पैरों और धड़ के क्लैंप मेंछेदों की
पंक्ति यों मेंजाती है। पंक्ति -1 क्लैंप को संपीड़ि त हवा देती है। पंक्ति -2 पसीनेकी भाप को बाहर नि कालता है।
तापमान सेंसर, त्वचा की नमी सेसंकेतों द्वारा बाहों, पैरों और शरीर के क्लैंप के दबाव, तापमान और वायु
आर्द्रता को सेट करना: हवा हीट पंप को ठंडा करती है, ड्राइव की वायुशीतलन प्रणाली को गर्म करती है।
उंगलि यों, बाहों, परै ों और धड़ के क्लपिैं गं बल के लि ए एल्गोरि दम का चयन।
एंड्रॉइड पर एक इंसान को झटका भेजना
एंड्रॉइड को कि सी व्यक्ति को प्रभाव वेक्टर को सटीक रूप से सचं ारि त करने के लि ए, ट्रंक के क्लपिैं गं फ्रे म में
परस्पर लंबवत शॉक वाइब्रेटर तय कि ए जातेहैं। एक शॉक वाइब्रेटर दो स्प्रि ंग्स के बीच गाइड मेंनि लंबि त एक
हथौड़ा है। दो चबंु कीय वाइंडि गं लगातार स्प्रि ग्ं स पर हथौड़ा घमु ाते हैं। हथौड़ा नि हाई-1-2 के बीच दोलन करता
है, उन्हेंछूए बि ना।
एंड्रॉइड को एक झटका मि ला - एंड्रॉइड के धड़ के त्वरण ससें र से सकं े त वाइंडि गं -1 को एक अति रि क्त वर्तमान
पल्स की आपूर्ति करता है। हथौड़ा नि हाई-1 सेटकराता है, जि ससेव्यक्ति को झटका लगता है।
वि परीत दि शा मेंप्रहार करने से वाइंडि गं -2 मेंअति रि क्त करंट पल्स की आपर्तिू का अनकु रण होता है। हथौड़ा
नि हाई-2 से टकराता है। स्प्रि गं हथौड़े को वाइंडि गं मेंअति रि क्त करंट पल्स की आपर्तिू कि ए बि ना नि हाई से
टकरानेसेरोकतेहैं।
पैर फि सलनेका अलार्म
झुकी हुई फि सलन वाली सतहों पर, व्यक्ति को एंड्रॉइड के पैरों के फि सलनेका एहसास नहींहोता। पैर
एक्सोस्केलेटन स्लाइड अलार्म व्यक्ति को एंड्रॉइड के पैर के फि सलनेकी दि शा बताता है। शॉक वाइब्रेटर-1,
नि हाई पर कई वार करके एंड्रॉइड के पैर के अंगूठे को अनुदैर्ध्य रूप सेफि सलनेदेता है, शॉक वाइब्रेटर-2 - पैर के
अंगूठे को अनुप्रस्थ रूप सेफि सलनेदेता है, शॉक वाइब्रेटर-3 - एड़ी को अनुप्रस्थ रूप सेफि सलनेदेता है।
वाइब्रेटर समकालि क रूप सेकाम करतेहैं।
एंड्रॉइड का पैर दाईं ओर फि सलता है: हथौड़ा (दाहि नी वाइंडि गं को हि लाता है) दाईं नि हाई (कम शोर वाला मि श्र
धातु, शोर-रोधी सस्पेंशन) सेटकराता है। वार का बल पैर की फि सलनेकी गति के समानुपाती होता है। स्प्रि ंग
हथौड़ेको वापस लौटाता है। पैर के दाईं ओर फि सलनेके दौरान चक्र को दोहराएँ।
प्रत्येक प्रभाव वाइब्रेटर मेंएक दि शा या वि परीत दि शा मेंप्रभाव संचारि त करनेके लि ए दो नि हाई होती हैं।
दोलन आवृत्ति को बढ़ानेके लि ए, शॉक वाइब्रेटर के स्क्रू ड्राइव, सॉफ़्टवेयर के संकेत पर, दोनों एवि ल को एक
दूसरेके करीब लातेहैं, दोनों स्प्रि ंग को संपीड़ि त करतेहैं। हथौड़ेका स्ट्रोक कम हो जाता है, वार की आवृत्ति बढ़
जाती है।
अलार्म केवल पैर की धीमी गति को प्रसारि त करता है। अलार्म की सक्रि यण गति के लि ए सीमाएँपैर के नि चले
तल के अनुदैर्ध्य और अनुप्रस्थ झुकाव के कोणों पर नि र्भर करती हैं।
स्लाइडि गं जि म्बल के कोणीय सकं ल्प से अधि क है - जि म्बल व्यक्ति को स्लाइडि गं की दि शा मेंघमु ाता है।
एंड्रॉइड पैर के पैर के अंगूठे मेंपैर के अनुदैर्ध्य और अनुप्रस्थ रैखि क आंदोलन के लि ए जड़त्वीय सेंसर होतेहैं।
एड़ी के अनुप्रस्थ आंदोलन के लि ए एक जड़त्वीय सेंसर है। वे3 चैनल देतेहैं: पैर के अंगूठे की अनुप्रस्थ,
अनदु ैर्ध्य स्लाइडि गं + एड़ी की अनप्रु स्थ स्लाइडि गं ।
एड़ी पर एंड्रॉइड के पैर के समर्थन के बि ना, एड़ी सेकोई संकेत नहींमि लता है। जड़त्वीय सेंसर को
पीजोमाइक्रोफोन द्वारा डुप्लि केट कि या जाता है।
एंड्रॉइड ट्रंक मेंत्वरण सेंसर द्वारा अपनी गति नि र्धा रि त करता है, जब पैर फर्श पर उतरता हैतो ब्रेकि ंग आवेग
के क्षैति ज घटक द्वारा। पल्स को 3 3D-फुट बल सेंसर द्वारा समन्वय अक्षों के साथ अलग सेनि र्धा रि त कि या
जाता है।
एंड्रॉइड के धड़ में4 3D-त्वरण और कोणीय वेग सेंसर हैं(टीवी कैमरों का जाइरो स्थि रीकरण)। पहि यों के साथ
टेलीप्रेजेंस सूट के वर्चुअल कंट्रोल सि स्टम में। बल तुल्यकारक (4 पहि ए: बल वृद्धि दर की 4 श्रेणि याँ) एक
व्यक्ति बल श्रेणि यों का लाभ, बल वृद्धि की गति सेअति रि क्त लाभ का गुणांक नि र्धा रि त करेगा। एक
खतरनाक वस्तु(खानों, प्रक्षेप्य ...) की वजन सीमा के लाभ हानि सेटि ंग्स (ध्वनि संकेत)। माइनस्वीपर मोड:
एक अलग ऊर्ध्वा धर, क्षैति ज नकारात्मक लाभ के साथ बल का तुल्यकारक हाथों की संवेदनशीलता को
बढ़ाएगा।
इक्वलाइज़र को मोड मेंबदलना
कंपन इक्वलाइज़र: उंगलि यों, हाथों, पैरों, शरीर के कंपन, झटके और कोणीय त्वरण के आवृत्ति बैंड को फ़ि ल्टर
करना। टेलीप्रेजेंस सूट के "कंपन इक्वलाइज़र" के साथ झटके और कोणीय त्वरण को सीमि त करनेके लि ए
एक मानक मॉडल चुननेवाला व्यक्ति आंकड़ों को स्पष्ट करेगा।
एंड्रॉइड को मारना - टेलीप्रेजेंस सूट एक व्यक्ति पर अभि नय करनेवालेशॉक त्वरण की सीमाओंके साथ एक
नई एंड्रॉइड स्थि ति मेंएक सहज संक्रमण मोड को सक्षम करेगा।
गाइड पर ड्राइव सि र पर फूलती है
वर्चुअल रि यलि टी हेलमेट धड़ के एक्सोस्केलेटन मेंतय कि या गया है। कंधेके कटआउट के साथ एक पारभासी
गोलाकार 3D स्क्रीन के पीछे, मैन-1 के लि ए अदृश्य 32 फीडबैक टीवी कैमरेएक दूरस्थ सूट-2 टेलीप्रेजेंस में
मैन-2 को सूट-1 टेलीप्रेजेंस मेंमैन-1 के चेहरेकी 3D तस्वीर देतेहैं।
प्रत्येक टीवी कैमरा एक चेहरेका एक चौकोर टुकड़ा दि खाता है, गोलाकार वि कृति यों को सॉफ्टवेयर द्वारा
मुआवजा दि या जाता है। वर्गों की सीमाओंको एक व्यक्ति के सि र पर अस्थायी रूप सेस्वि च-ऑन आयताकार
प्रकाश ग्रि ड के साथ कैलि ब्रेट कि या जाता है।
टीवी कैमरों मेंमैट स्क्रीन सेपरावर्ति त वि सरि त प्रकाश के साथ बैकलाइट लैंप होतेहैं। कैमरा एंगल, हेलमेट में
फेस लाइटि ंग का प्रकार, रंग परि वर्तन, प्रत्येक एलईडी लैंप की चमक - सॉफ्टवेयर परि दृश्य। एक 3D-स्क्रीन,
फीडबैक टीवी कैमरेऔर लैंप एक दूसरेके साथ हस्तक्षेप कि ए बि ना समय मेंअलग-अलग आवेगपूर्ण तरीके से
काम करतेहैं।
3D-स्क्रीन की त्रि ज्या 30 सेमी है: हाथों के एक्सोस्केलेटन तस्वीर को खराब नहींकरतेहैं। आँखों सेदूर, स्क्रीन
पर समुद्री बीमारी, "वास्तवि क वस्तुसेदूरी - स्क्रीन से" के अंतर सेमतली कम होती है।
कि नारों पर 3D-स्क्रीन 10 सेमी तक चपटी होती हैताकि ऊपर सेकाम करतेसमय, हाथ स्क्रीन को न छुएँ।
वि कल्प 2: 3D स्क्रीन मेंएक तस्वीर 6 लेजर प्रोजेक्टर द्वारा स्क्रीन के बाहर या अंदर सेबनाई जाती है।
एंड्रॉइड टीवी कैमरे
एंड्रॉइड के सि र को मोड़नेके बजाय, 2 अक्षों के साथ कैमरा कोणों और उनके मैट्रि सेस की रेखाओंका
जाइरो-स्थि रीकृ त स्वि चि गं (क्षैति ज, लबं वत) कि या जाता है। टीवी कै मरों के साथ एंड्रॉइड को अपना सि र घमु ाने
की ज़रूरत नहींहै। एंड्रॉइड मेंअलग-अलग व्यूइंग एंगल पर 6-12 टीवी कैमरेहैं। मुख्य और अति रि क्त टीवी
कैमरों की फ़्रेम लाइनों सेफ़्रेम को संश्लेषि त करके दृष्टि की रेखा का घुमाव।
यह रोबोट के कैमरा फ़्रेम की पृष्ठभूमि के आधेहि स्सेको स्थि र बनाता है, जि ससेवीडि यो सि ग्नल को अधि क
मजबूती सेसंपीड़ि त कि या जा सकता है।
एंड्रॉइड मेंरेंज में5 फ़ोकल रेंज हैं। अलग-अलग फ़ोकस वाली छवि यों को सॉफ़्टवेयर द्वारा जोड़ा जाता है।
कि सी व्यक्ति द्वारा ऑब्जेक्ट की दूरी नि र्धा रि त करनेके लि ए प्रत्येक फ़ोकल रेंज के लि ए 2 स्टीरि यो कैमरा
हैं। फ़ोकस की लंबाई को धड़ के एक्सोस्केलेटन के पहि यों या जबड़ेकी हरकतों सेसमायोजि त कि या जा सकता
है।
फ्रेम दर और ट्रैफ़ि क को कम करनेके लि ए, टीवी कैमरों मेंअल्ट्रा-लो फ्रेम शटर स्पीड के साथ एक बड़ा एपर्चर
लेंस होता है। एक शटर स्पीड एडजस्टमेंट व्हील है।
स्टीरि यो कैमरों द्वारा रोबोट का नेवि गेशन
प्रकाश की कमी: रोबोट के लैंप एक दूसरेसेदूर फैलेहुए हैं।
अति रि क्त प्रकाश: प्रकाश संवेदक और सॉफ़्टवेयर छवि के ध्रुवीकरण वेक्टर को नि यंत्रि त करतेहैं, पि क्सेल से
सि ग्नल को हटानेकी अवधि को कम करतेहैं:
1. पि क्सेल के संचालन की अवधि कैमरा फ़्रेम के समय सेकम है
2. पि क्सेल सि ग्नल "फ़्रेम समय - पि क्सेल संचालन अवधि " के अंतर के दौरान रीसेट हो जाता है
जब रोबोट का कैमरा चलता है, तो रोबोट के नि र्देशांक ज्ञात आकार की वस्तुओंके कोणीय आयामों की वृद्धि
दर सेनि र्धा रि त होतेहैं(तालि काएँ)।
एंड्रॉइड के गोलाकार 3D फेशि यल डि स्प्ले-हेड मेंएक मानव चेहरा।
3D साउंड कि सी भी ध्वनि आगमन वेक्टर का सटीक पुनरुत्पादन है।
हेलमेट मेंप्रत्येक कान के लि ए, 30 गोलार्ध सींग हैंजो हेलमेट स्क्रीन में2 मि मी व्यास वालेछि द्रों के माध्यम
सेध्वनि देतेहैं। छेद एक ट्यूब हैजि सकी लंबाई 2 मि मी हैजो 3 डी स्क्रीन के पड़ोसी पि क्सेल के रंगों के
अनुसार एलईडी द्वारा अंदर सेरोशन हैताकि छेद दि खाई न दे।
ध्वनि की मात्रा सीमा सेऊपर है- प्रत्येक छेद की आवाज़ के लि ए- स्पीकर सॉफ़्टवेयर अन्य छि द्रों की आवाज़
चालूकर देगा। हेलमेट के बाहर एंटीफ़ेज़ स्पीकर दूसरों के लि ए शोर को कम करतेहैं। बास को इलेक्ट्रि क वाल्व
के साथ बाहों (पैरों) के क्लैंप की वेंटि ंग एयर द्वारा प्रदान कि या जाता है।
रात में, एक व्यक्ति अल्ट्रासोनि क संश्लेषण (रात मेंकोई भी वॉल्यूम) ध्वनि चालूकरता है, जो पड़ोसि यों के
लि ए मौन है। ध्वनि को अल्ट्रासोनि क आवृत्ति यों की धड़कनों द्वारा संश्लेषि त कि या जाता है। हेलमेट के
अल्ट्रासोनि क उत्सर्जक सभी ध्वनि आगमन वैक्टर को संचारि त करतेहैं।
एक टेलीप्रेजेंस सटू में, 3 डी ध्वनि ताकि सड़क पर एक एंड्रॉइड पीछे से, बगल से ड्राइवि गं करने वाली कार से
टकरा न जाए, नीचेन गि र जाए।
सटीक 3D ध्वनि की प्रणाली जि सका मैंनेआवि ष्कार कि या:
1. 3D ध्वनि का आउटपटु सि ग्नल सनु ने के बि दं ु पर वायु प्रवाह (तरंगों) का एक तात्कालि क कु ल वेक्टर है,
जि सकी लंबाई 3D ध्वनि के कुल चैनल द्वारा प्रेषि त अंतरि क्ष के तीन अक्षों के साथ ध्वनि आयामों की कुल
संख्या है।
2. अंतरि क्ष के नि र्देशांक पर 3D-ध्वनि वेक्टर के प्रक्षेपण 3D-ध्वनि के 3 चैनल हैंजो ध्वनि चि त्र मेंअपनेस्रोत
सेध्वनि के आगमन के 3D-वेक्टर को नि र्धा रि त करतेहैं।
3. ध्वनि आगमन का क्षैति ज कोण: संकेत संचय के बाद ऊर्ध्वा धर झि ल्ली के अंतर संकेत के अनुसार: प्रत्येक
आवृत्ति रेंज मेंएक अलग संकेत संचय टाइमर होता है। टाइमर और सि ग्नल संचय कार्य माइक्रोफोन सर्कि ट में
4. ध्वनि आगमन का ऊर्ध्वा धर कोण: 3D माइक्रोफोन की क्षैति ज झि ल्ली के अंतर संकेत और ऊर्ध्वा धर
झि ल्ली के कुल संकेत के आधार पर। अंतर संकेत, संकेत संचय के बाद का एक अंक है: प्रत्येक आवृत्ति रेंज में
एक अलग संकेत संचय टाइमर होता है। टाइमर और संकेत संचय कार्य माइक्रोफोन सर्कि ट मेंसॉफ्टवेयर या
कैपेसि टर द्वारा कि ए जातेहैं।
5. ध्वनि आगमन का गोलार्ध अंतर संकेतों की ध्रुवता द्वारा सि द्धांत के अनुसार नि र्धा रि त कि या जाता है-
ग्राफ पर, ध्वनि की सकारात्मक अर्ध-तरंगों (वायुसंपीड़न) का क्षेत्र नकारात्मक (वायुकमजोर पड़ने)
अर्ध-तरंगों के क्षेत्र सेअधि क है। सॉफ्टवेयर ध्रुवता नि र्धा रि त करता है। ध्वनि सकारात्मक अर्ध-तरंगों की तरफ
सेआती है।
6. ध्वनि के स्रोतों (ध्वनि आगमन के 3 डी-वेक्टर) का स्थान सि ग्नल की ध्रुवता द्वारा नि र्धा रि त कि या जाता
है: ध्वनि स्रोत दि शा में(ध्वनि आगमन के वेक्टर का 3 डी-कोण), जि समेंतीन नि र्देशांक के साथ वायुसंपीड़न
की अर्ध-तरंगों का कुल क्षेत्र अधि कतम है।
7. ध्वनि आगमन के 3D-वेक्टर के कोण माइक्रोफोन झि ल्ली के संपीड़न (वायु) की अर्ध-तरंगों के तात्कालि क
आयामों के अनुपात सेनि र्धा रि त होतेहैं।
3D-ध्वनि : एक मानव सि र अतं रि क्ष के श्रवण बि दं -ु D पर स्थि त है। कोई भी जटि ल ध्वनि पटै र्न बि दं -ु D पर हर
पल वायुगति का केवल एक एकल कुल 3D-वेक्टर देता है। अलग-अलग ध्वनि स्रोतों सेवायुगति के सभी
वैक्टर को वायुगति के एक कुल 3D-वेक्टर मेंसंयोजि त कि या जाता है। वायुगति का यह 3D-वेक्टर 100%
जानकारी वहन करता हैकि कहाँसे, कि स ध्वनि स्रोत से, वास्तव मेंकौन सी ध्वनि आई।
वायुगति का 3D-वेक्टर ध्वनि सूचना के सभी अलग-अलग स्रोतों सेध्वनि आगमन के सभी वैक्टरों के बारेमें
100% जानकारी प्रदान करता है। इस जानकारी को अंतरि क्ष मेंफैलेध्वनि वक्ताओंके अलग-अलग चैनलों में
वि भाजि त करनेके लि ए, हम वायुगति के 3D-वेक्टर को अंतरि क्ष के तीन नि र्देशांकों मेंप्रक्षेपणों मेंवि घटि त
करतेहैं। सॉफ्टवेयर तात्कालि क ध्वनि वॉल्यूम स्तरों के अनुपात के अनुसार कोणीय चैनल पृथक्करण प्रदान
करता है।
आइए एक क्षैति ज रूप सेस्थि त ध्वनि पैटर्न लें। यह क्षैति ज तल मेंध्वनि के आगमन के 2D-वेक्टर के संकेत
को प्रसारि त करता है। यदि दाएंऔर बाएंस्पीकर के बीच तात्कालि क ध्वनि वॉल्यूम स्तरों का अनुपात 50%
है, तो ध्वनि चि त्र मेंध्वनि स्रोत स्पीकर के बीच बि ल्कुल बीच मेंहै। स्पीकर पारंपरि क रूप सेटेलीप्रेजेंस सूट के
ऑपरेटर के चारों ओर एक सर्कल मेंव्यवस्थि त होतेहैं।
यदि तात्कालि क ध्वनि वॉल्यूम स्तरों का अनुपात बाएंकॉलम के लि ए 20% और दाएंकॉलम के लि ए 80% है,
तो ध्वनि सामनेके गोलार्ध सेआई है। ध्वनि चि त्र मेंध्वनि स्रोत व्यक्ति सेगुजरनेवालेअनुदैर्ध्य क्षैति ज अक्ष
के दाईं ओर 35° के कोण पर स्थि त है।
बाएंपीछे के कॉलम में80%, दाएंपीछे के कॉलम में20% ध्वनि स्रोत व्यक्ति सेगुजरनेवालेअनुदैर्ध्य क्षैति ज
अक्ष के दाईं ओर 35° के कोण पर है।
सॉफ़्टवेयर सि ग्नल की ध्रुवता द्वारा ध्वनि आगमन के गोलार्ध को नि र्धा रि त करता है। ध्वनि ध्वनि दबाव के
सकारात्मक अर्ध-तरंग (संपीड़न तरंग) पक्ष सेआती है।
यदि 2D ध्वनि आगमन वेक्टर के सि ग्नल मेंसकारात्मक संपीड़न अर्ध-तरंग सामनेके गोलार्ध को इंगि त
करती है, तो ध्वनि स्रोत इसमेंस्थि त है। यदि 2D वेक्टर सि ग्नल पीछे के गोलार्ध की ओर इंगि त करता है, तो
ध्वनि स्रोत पीछे के गोलार्ध मेंहै।
इसी तरह, सॉफ़्टवेयर ध्वनि स्रोतों के कोण और अनुदैर्ध्य ऊर्ध्वा धर तल या अनुप्रस्थ ऊर्ध्वा धर तल मेंउनके
स्थान का पता लगाता है।
मेरेद्वारा आवि ष्कृत 3D-ध्वनि प्रणाली में, जो ट्रैफ़ि क के मामलेमेंदुनि या मेंसबसेकि फायती है, सभी चैनलों
का 3D-ध्वनि आउटपुट समान है, केवल तात्कालि क (शून्य और ऊपर से) ध्वनि स्तर भि न्न हैं। मेरेद्वारा
आवि ष्कृत 3D ध्वनि प्रणाली ट्रैफ़ि क को ~6 गुना कम ध्वनि 7.1 और ~4 गुना कम ध्वनि 5.1 देती है
मेरे3D-ध्वनि सि स्टम मेंध्वनि की गुणवत्ता सैद्धांति क रूप सेध्वनि 7.1 के समान ही है
ध्वनि स्रोत की दि शा नि र्धा रि त करनेकी कोणीय सटीकता ध्वनि 7.1 की तुलना मेंअधि क है, सॉफ़्टवेयर द्वारा
ध्वनि आगमन वेक्टर की गणना और स्पीकर की संख्या को ध्यान मेंरखतेहुए।
ध्वनि 7.1 3D-ध्वनि नहींहै- ध्वनि आगमन वेक्टर केवल क्षैति ज तल मेंहैं।
3D-ध्वनि रि कॉर्डिं ग: 3D-माइक्रोफ़ोन: 3 परस्पर लंबवत झि ल्ली जि तना संभव हो उतना करीब + एक अलग
आवास मेंतीन परस्पर लंबवत बास-माइक्रोफ़ोन जि समेंशेष आवृत्ति यों को काटनेवाला फ़ि ल्टर होता है।
3D-ऑडि यो ट्रांसमि शन
के लि ए एक 3D-माइक्रोफ़ोन या 3 संयुक्त स्टीरि यो माइक्रोफ़ोन की आवश्यकता होती है। संयुक्त स्टीरि यो
माइक्रोफ़ोन के साथ, 3D-ध्वनि के लि ए हानि कारक मध्यम और उच्च आवृत्ति यों के चरण परि वर्तन को
माइक्रोफ़ोन झि ल्ली के आकार को कम करके हटा दि या जाता है।
3D-साउंड प्लेबैक
सामने4 वर्टि कल प्लेन स्पीकर + पीछे 4 वर्टि कल प्लेन स्पीकर ध्वनि आगमन का कोई भी तात्कालि क कुल
वेक्टर देतेहैं। 3D-हेडफ़ोन में8 स्पीकर होतेहैं: प्रत्येक कान में4 स्पीकर ध्वनि तरंग की गति के 4 वेक्टर देते
हैंजो ऑरि कल के प्लेन के ति रछे (वर्टि कल से45° कोण) दि शा मेंनि र्देशि त होतेहैं। अधि क स्पीकर - ध्वनि
चि त्र मेंस्रोत सेध्वनि तरंग के आगमन के वैक्टर की उच्च कोणीय सटीकता।
ऑडि यो चैनल चयन
ध्वनि स्रोत की ओर अपना सि र घुमाकर, व्यक्ति स्वचालि त रूप सेचयनि त दि शा मेंध्वनि को बढ़ाता है,
3D-ध्वनि के अन्य चैनलों को मफल करता है। सेटि ंग्स मेंध्वनि चयन एल्गोरि दम का चयन।
कि सी व्यक्ति को 3D-ध्वनि संचारि त करनेके लि ए, एंड्रॉइड मेंसि र के बाईं ओर एक 3D-माइक्रोफ़ोन + सि र के
दाईं ओर एक 3D-माइक्रोफ़ोन होता है। या बाईं ओर 2 संयुक्त स्टीरि यो माइक्रोफ़ोन + दाईं ओर 2 संयुक्त
स्टीरि यो माइक्रोफ़ोन होतेहैं। कुछ एंड्रॉइड मॉडल में, मोनोमाइक्रोफोन हथेलि यों में, कूल्हों के नि चलेहि स्सेमें,
कमर पर दाईं और बाईं ओर होतेहैं।
ध्वनि स्रोत की सीमा नि म्न द्वारा नि र्धा रि त की जाती है:
1. ध्वनि आयामों मेंअंतर के अनुसार - एक संधारि त्र द्वारा संकेत संचय - प्रत्येक आवृत्ति सीमा मेंएक अलग
टाइमर होता है।
2. वि भि न्न माइक्रोफोनों मेंध्वनि के आगमन के समय के अनुसार
3. संकेत की ऊपरी आवृत्ति यों की ऊर्जा के प्रति शत (संदर्भ एनालॉग सि ग्नल के साथ तुलना) के अनुसार।
टेलीप्रेजेंस सूट की आभासी नि यंत्रण प्रणाली में, ध्वनि के सामनेके गोलार्ध के लि ए 1 वॉल्यूम व्हील और 3
बैलेंस व्हील (क्षैति ज ध्वनि संतुलन + ऊर्ध्वा धर ध्वनि संतुलन + ध्वनि संतुलन "ध्वनि का सामनेका गोलार्ध -
ध्वनि का पि छला गोलार्ध") है, ध्वनि के पीछे के गोलार्ध के लि ए 2 बैलेंस व्हील (क्षैति ज ध्वनि संतुलन +
ऊर्ध्वा धर ध्वनि संतुलन) हैं। पहि यों की गति की दि शा ध्वनि संतुलन को समायोजि त करनेऔर ध्वनि स्तर
को बढ़ानेकी दि शा के साथ मेल खाती है- आप खतरनाक वातावरण मेंसैन्य एंड्रॉइड की प्रति क्रि या के लि ए
पहि यों के साथ ध्वनि आगमन वेक्टर का चयन जल्दी सेकर सकतेहैं।
वि कल्प 2: ध्वनि गोलार्धों (ऊपरी-नि चलेया दाएं-बाएं) के वैक्टर के स्पर्शनीय भेद के साथ "ध्वनि आगमन
वेक्टर को उलट दें" बटन के साथ ध्वनि की दि शा का चयन करनेके लि ए एक जॉयस्टि क। वॉल्यूम और ध्वनि
संतुलन पहि ए।
एंड्रॉइड 3 डी माइक्रोफोन की आवृत्ति वि शेषताओंऔर संवेदनशीलता मेंअंतर को सॉफ्टवेयर द्वारा मुआवजा
दि या जाता है।
रोबोट के रि मोट कंट्रोल के साथ, संभव:
मोशन सि कनेस - मतली, चक्कर आना, मानव थकान से:
1. उच्च गति , कैमरा कोण के कोणीय उतार-चढ़ाव का आयाम। समाधान:
а) रोबोट के कैमरा कोण के जाइरोस्कोप द्वारा ऑप्टि कल कोणीय स्थि रीकरण
б) सॉफ्टवेयर कैमरों की दृष्टि की रेखा के कोण मेंतात्कालि क छलांग के साथ समान कोणीय वेग को बदल
देता है। स्थि र पृष्ठभूमि , अधि कांश समय कोणीय वेग की अनुपस्थि ति व्यक्ति के स्वास्थ्य मेंसुधार करेगी
2. "वास्तवि क जीवन मेंआँख - वस्तु" की दूरी और "आँख - हेलमेट स्क्रीन" की दूरी के बीच असंगतताएँ।
समाधान: हेलमेट मेंस्क्रीन मानव आँखों सेदूर है।
टेलीप्रेजेंस सूट का इंटरनेट-ट्रैफ़ि क:
1. कुल पावर ट्रैफ़ि क, टेलीप्रेजेंस सूट के कोणीय चैनल 56 kbit/s (7 Kb/s):
कोणों के चैनल, कोणीय वेग: 34 kbit/s: 12 बि ट प्रति कोण, 5 बि ट प्रति कोणीय वेग 0,02s की नमूना अवधि
के साथ। केबल मूवमेंट के सेंसर सेसंकेतों के अनुसार 40 केबल के कोण: कोणीय गति पर + 10 kbit/s के
कोण पर 24 kbit/s। लोड के तहत केबल के बढ़ाव को नि र्णय तालि काओंद्वारा मुआवजा दि या जाता है।
भुजाओं, पैरों के बाह्यकंकालों का कोणीय वेग जि तना अधि क होगा - कोण संचरण की आवृत्ति उतनी ही
अधि क होगी
बल चैनल, बल वृद्धि दर: 22 kbit/s: प्रति बल 6 बि ट, प्रति बल वृद्धि दर 5 बि ट, 0,02s की नमूना अवधि के
साथ। यह 40 केबल में12 kbit/s के बल के लि ए + 40 केबल मेंबल वृद्धि की दर पर 10 kbit/s है
जाइरो चैनल: 1,95 kbit/s: 0,02s की नमूना अवधि के साथ प्रति कोण 7 बि ट का औसत। यह कार्डन के तीन
कोनों के लि ए 1,05 kbit/s है।
0,02s की नमूना अवधि के साथ प्रति कोणीय वेग 6 बि ट। यह कार्डन की 3 कोणीय गति पर 0,9 kbit/s है।
सक्रि य 3D-नि लंबन के 9 चैनलों के माध्यम सेट्रंक त्वरण चैनल: 2,3 kbit/s: 0,02s की नमूना अवधि के साथ
प्रति सेंसर चैनल 5 बि ट्स
2. वीडि यो चैनल, संपीड़ि त 3D-छवि , 3D-ध्वनि : 1 Mb/s
3. स्पर्श चैनल, दोनों ब्रश: 2,7 Mbit/s । एंड्रॉइड के काम करनेके लि ए, दोनों एंड्रॉइड हाथों की 8
उंगलि यों के लि ए 2304 पि क्सेल पर्या प्त हैं, 0,02s की नमूना अवधि के साथ प्रति पि क्सेल 3 बि ट्स। एंड्रॉइड
की उंगलि यों पर 48 x 48 स्पर्श मैट्रि क्स है।
गति शील दृश्यों म
जब इंटरनेट ट्रैफ़ि क की कमी होती है, तो "स्क्रीन रि ज़ॉल्यूशन - फ़्रेम रेट" एल्गोरि दम ट्रैफ़ि क के लि ए "स्क्रीन
रि ज़ॉल्यूशन - फ़्रेम रेट" वीडि यो बैलेंस को समायोजि त करेगा: यदि चि त्र मेंचलती रेखाओंकी महत्वपूर्ण
पि क्सेल गति पार हो जाती है, तो एल्गोरि दम रि ज़ॉल्यूशन को कम करके फ़्रेम दर को बढ़ा देगा। छवि में
रेखाओंकी पि क्सेल गति को कम करके, एल्गोरि दम छवि के रि ज़ॉल्यूशन को बढ़ाएगा, फ़्रेम दर को कम
करेगा।
एक व्यक्ति वर्चुअल कंट्रोल सि स्टम मेंवीडि यो बैलेंस, स्टीरि यो बेस और बफरि ंग को नि यंत्रि त करता है।
ट्रैफ़ि क बचाना
टीवी कैमरों मेंउच्च एपर्चर, कम शटर स्पीड और फ़्रेम की बि ट दर (एल्गोरि दम) होती है। एंड्रॉइड के हाथ ने
ऑब्जेक्ट को उठा लि या है- सॉफ़्टवेयर अस्थायी रूप सेहाथ के बल के चैनल को हटा देता है, पार्श्व बल की
उपस्थि ति या ऊर्ध्वा धर बल में2% सेअधि क परि वर्तन होनेतक उंगलि यों की ताकत को स्थि र करता है।
स्पर्शनीय साइटों की प्राथमि कता सूची: ट्रैफ़ि क बचाएँ- बड़ी संख्या वाली साइटों को अक्षम करें, फि र छोटी
संख्या वाली। संपीड़ि त टेलीप्रेजेंस सूट ट्रैफ़ि क 1-8 एमबी/एस है।
टेलीप्रेजेंस और वर्चुअल रि यलि टी सूट के लि ए, 5G सेलुलर नेटवर्क न्यूनतम नि यंत्रण वि लंब के खंड आवंटि त
करतेहैं।
केबल रोलर मेंबल को मापनेवाला एक बल सेंसर एक नि श्चि त हि ंग अक्ष के साथ लीवर पर ड्राइव सेसबसेदूर
केबल के अंत मेंस्थि त है: केबल के लोचदार वि रूपण का रोलर लीवर के लोड सेल पर कम प्रभाव पड़ता है। एक
नि श्चि त अक्ष वालेलीवर को रोलर के साथ स्प्रि ंग द्वारा प्रति स्थापि त कि या जा सकता है।
डुप्लि केट स्ट्रेंथ सेंसर सि ग्नल - ड्राइव मेंक्लच की वर्तमान ताकत: तालि का "कोण - समय सेगुणा की गई
वर्तमान ताकत"।
वि कल्प-2 बल सेंसर: रोलर अक्ष के लीवर द्वारा दबाए गए ज़ि रकोनि यम टेट्राक्लोराइड प्लेट की वि द्युत
चालकता दबाव सेबदल जाती है।
बल सेंसर का प्रगति शील बि ट दर पैमाना बल संचरण की सटीकता छोटेऔर बड़ेमानवीय प्रयासों के साथ बलों
की परू ी श्रखंृ ला पर समान होनी चाहि ए। यह सपै र और सर्जन के लि ए महत्वपर्णू है।
1 बि ट टेलीप्रेजेंस सूट स्ट्रेंथ सेंसर का सि ग्नल स्ट्रेंथ स्टेप है। स्केल की शुरुआत में, 1 बि ट एक छोटा अंक है:
सतह पर एंड्रॉइड की उंगलि यों के हल्के स्पर्श में, बल छोटेहोतेहैं। जैसे-जैसेसतह के खि लाफ एंड्रॉइड की
उंगलि यों का बल बढ़ता है, बल का प्रत्येक बाद का चरण बड़ा होता है: बल के चरणों के बीच बलों का अंतर उसी
अनुपात मेंबढ़ता है।
बि ट दर अंशांकन
एंड्रॉइड सेंसर की बि टनेस टेलीप्रेजेंस सूट के सेंसर की बि टनेस के बराबर नहींहै- मि लान तालि का "एंड्रॉइड की
बि टनेस - टेलीप्रेजेंस सूट की बि टनेस" काम करती है: सेंसर की बि टनेस के अंकों को फि जि योलॉजी को ध्यान में
रखतेहुए फ़ि ट करना। टेलीप्रेजेंस सूट तालि का को एंड्रॉइड तालि का मेंबदला जा सकता है
टेलीप्रेजेंस सूट के हाथ, पैर और ड्राइव के एक्सोस्केलेटन एंड्रॉइड के यांत्रि की के समान हैं। टेलीप्रेजेंस सूट क्लि प
के फैब्रि क मेंसेमीकंडक्टर-लेपि त तारों के चौराहेपर पेल्टि यर प्रभाव (परि वेश के तापमान से72 डि ग्री
सेल्सि यस नीचे) के आधार पर टेलीप्रेजेंस सूट का तापमान नि यंत्रण।
इस साल मैंभारत मेंनि वास परमि ट प्राप्त करनेके लि ए भारत जा रहा हूँ, भारतीय नि वेशकों की मदद से
बैंगलोर मेंएक आवि ष्कारशील कंपनी बनानेके लि ए, जो वि श्व बाजार मेंसॉफ्टवेयर (भारतीय प्रोग्रामर + मेरे
एल्गोरि दम) के साथ एक टेलीप्रेजेंस और वर्चुअल रि यलि टी सूट लॉन्च करेगी। मेरी कंपनी वि श्व बाजार मेंमेरे
अन्य वि कासों को बढ़ावा देगी जो एक आवि ष्कारक के रूप मेंमेरेआधेशताब्दी के काम सेसंचि त हैं।
मेरी फर्म, भारतीय नि वेशकों की ओर से, भवि ष्य के भारतीय चंद्र बेस के लि ए एक टेलीप्रेजेंस सूट बनानेके
लि ए भारतीय अंतरि क्ष अनुसंधान संगठन इसरो के साथ एक अनुबंध पर हस्ताक्षर करेगी। चंद्र उद्योग अपने
बुनि यादी ढांचेऔर मेट्रो लाइनों के साथ चंद्र बेस सेनि यंत्रि त एंड्रॉइड द्वारा बनाया जाएगा।
28.04.2024
इस वर्ष मैं भारत में निवास की अनुमति प्राप्त करने के लिए भारत जा रहा हूँ, भारतीय निवेशकों की सहायता से बैंगलोर में एक आविष्कार कंपनी बनाने के लिए, जो विश्व बाजार (भारतीय प्रोग्रामर) में गेमिंग सॉफ्टवेयर के साथ एक टेलीप्रेजेंस और वर्चुअल रियलिटी सूट बनाएगी। मेरी भारतीय कंपनी मेरे अन्य विकासों को बढ़ावा देगी, जो एक आविष्कारक के रूप में मेरे अवैतनिक कार्य के आधे शताब्दी से अधिक समय से संचित हैं, विश्व बाजार में। वे विश्व इतिहास के पाठ्यक्रम को उसी तरह बदल देंगे जिस तरह से मैनहट्टन परियोजना ने विश्व इतिहास के पाठ्यक्रम को बदल दिया। मैं भारत सरकार को विश्व बाजार के सबसे अधिक ज्ञान-गहन क्षेत्रों में विश्व औद्योगिक शक्ति का केंद्र भारत में स्थानांतरित करने की प्रतिज्ञा करता हूं। मैं यह साबित कर सकता हूं और करने के लिए तैयार हूं कि पारंपरिक एल्गोरिदम पर आविष्कार, डिजाइन और कृत्रिम बुद्धिमत्ता में मैं विश्व टीम से अधिक मजबूत हूं। मुझे यह साबित करने का मौका दें और भारतीय उद्योग के हितों की सेवा करके मैं आपके भरोसे को पूरी तरह से सही ठहराऊंगा। मेरे जीवन में किसी ने मुझे कभी मौका नहीं दिया!
26.06.2024
Все чертежи и рисунки на сайте сделаны мной.
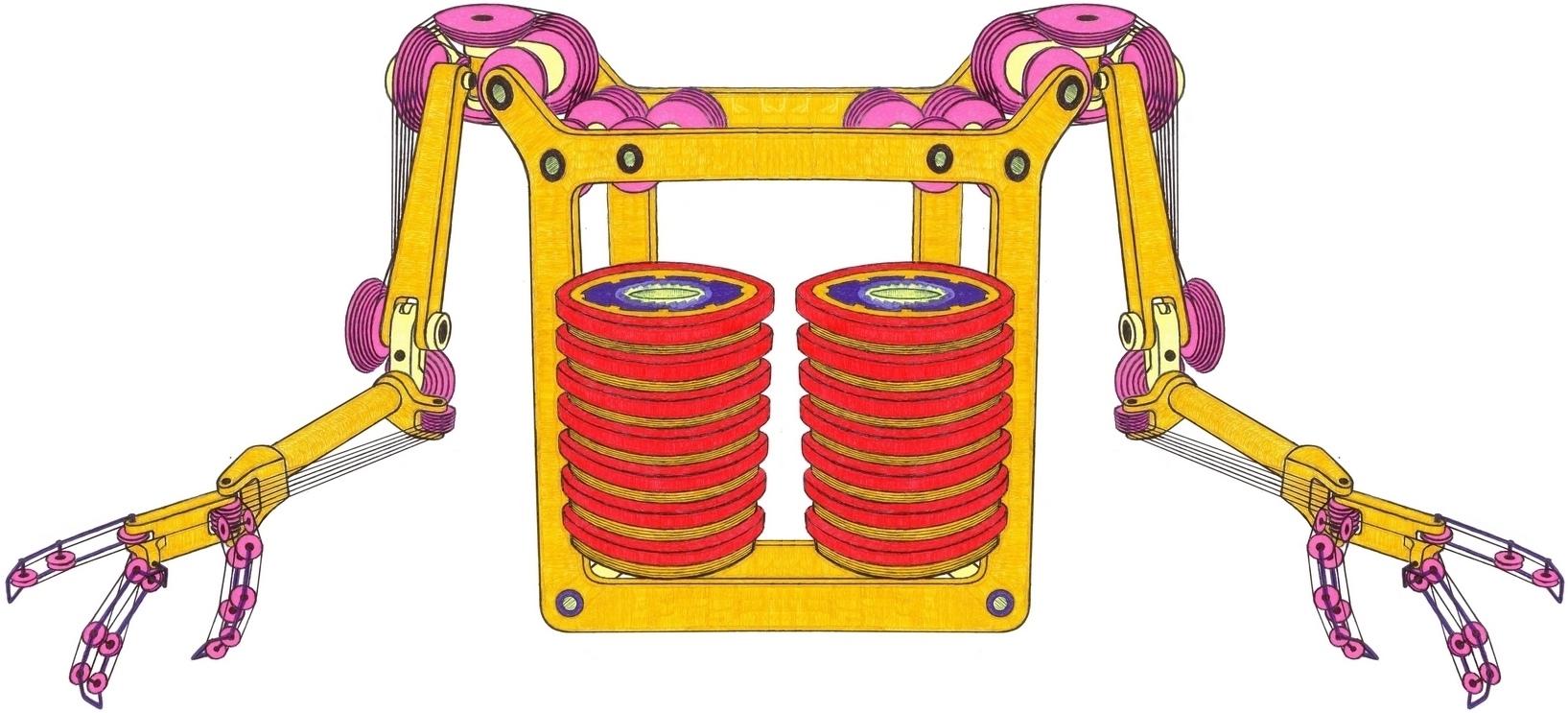
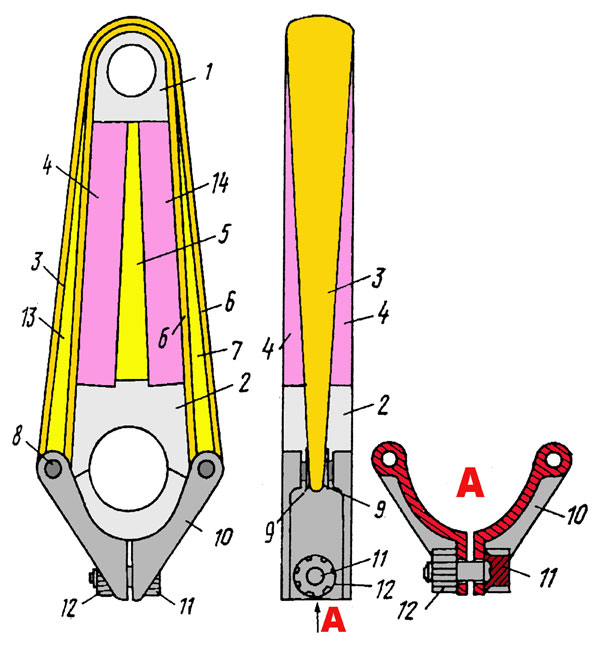
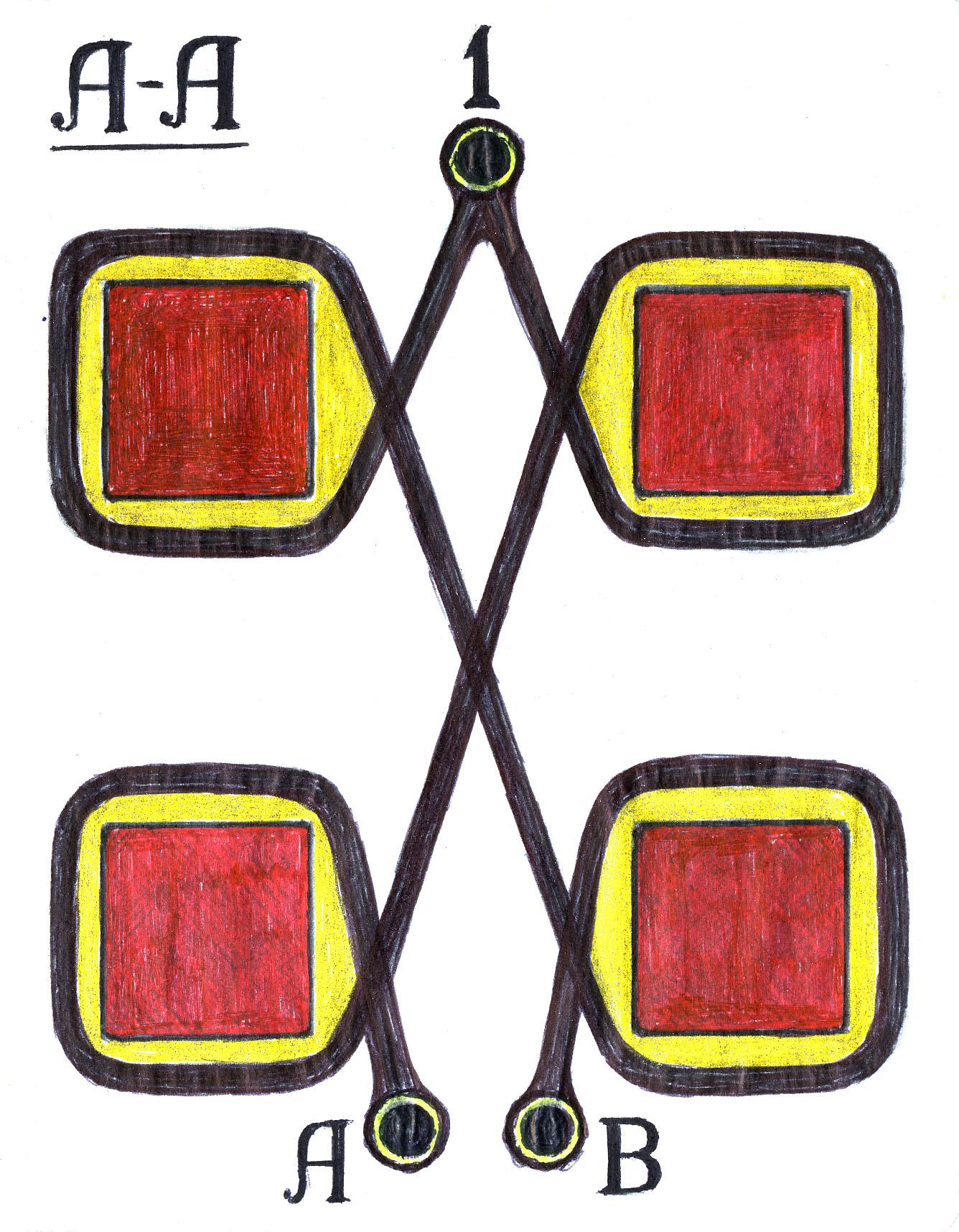
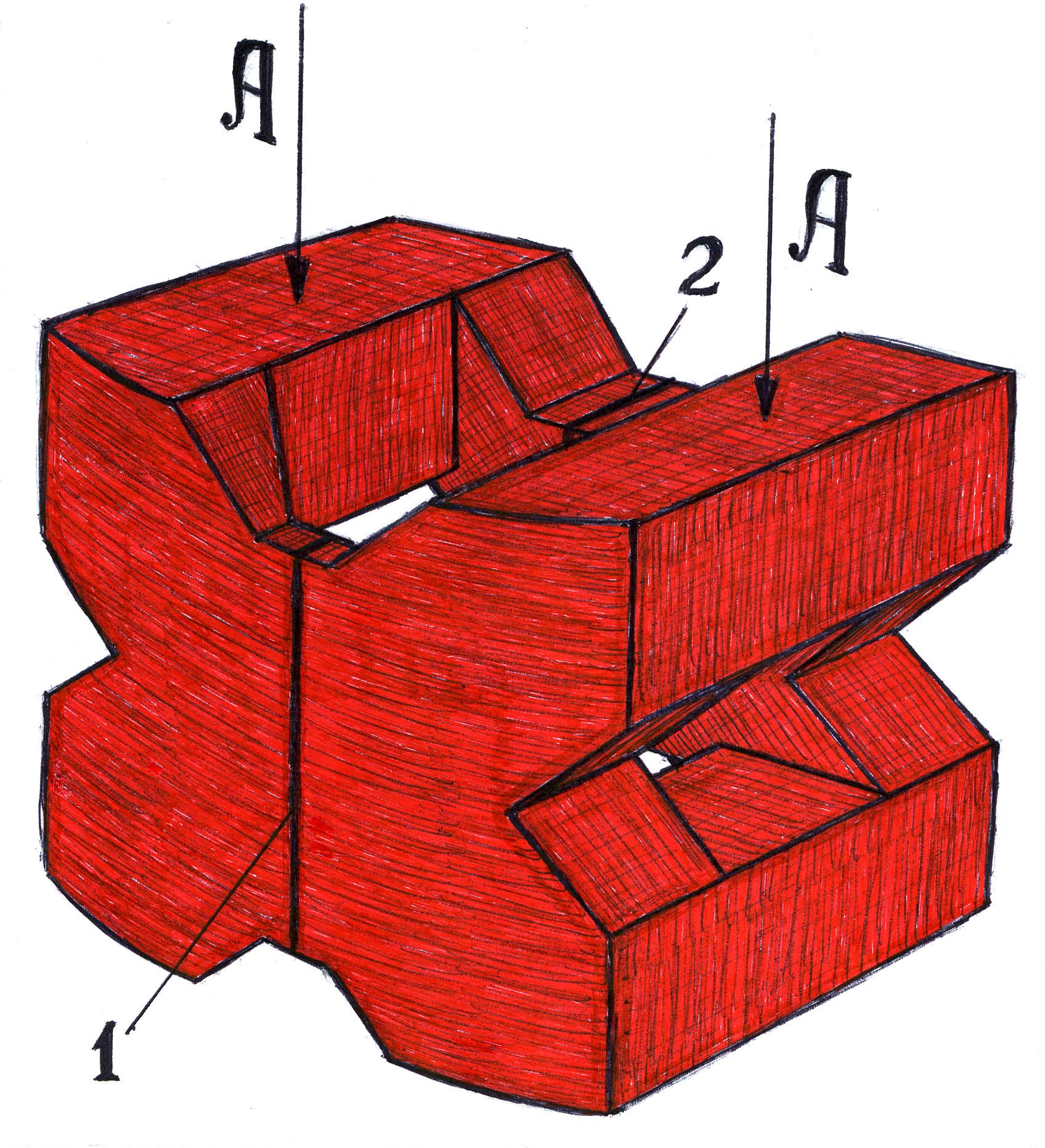
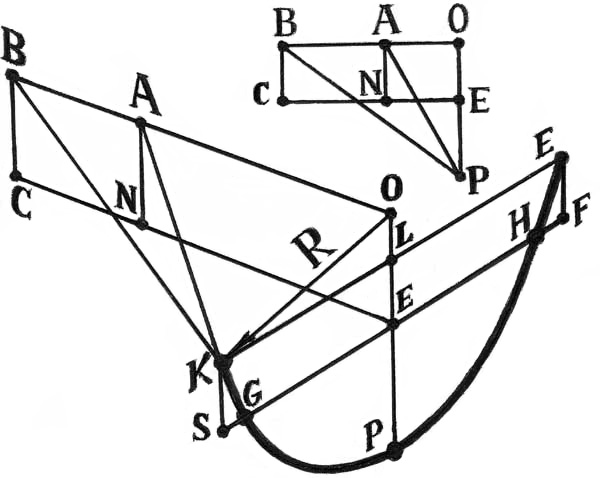
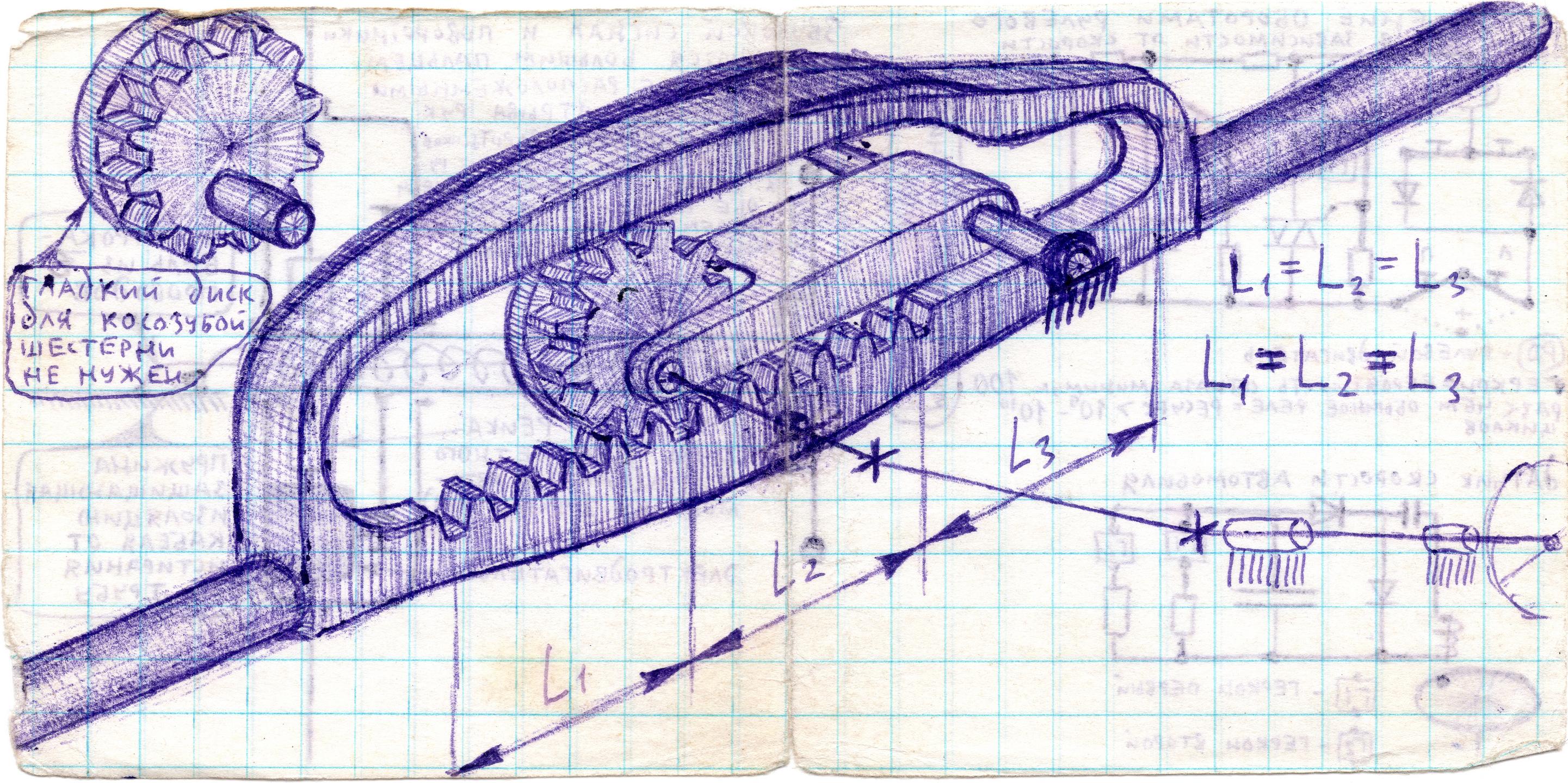
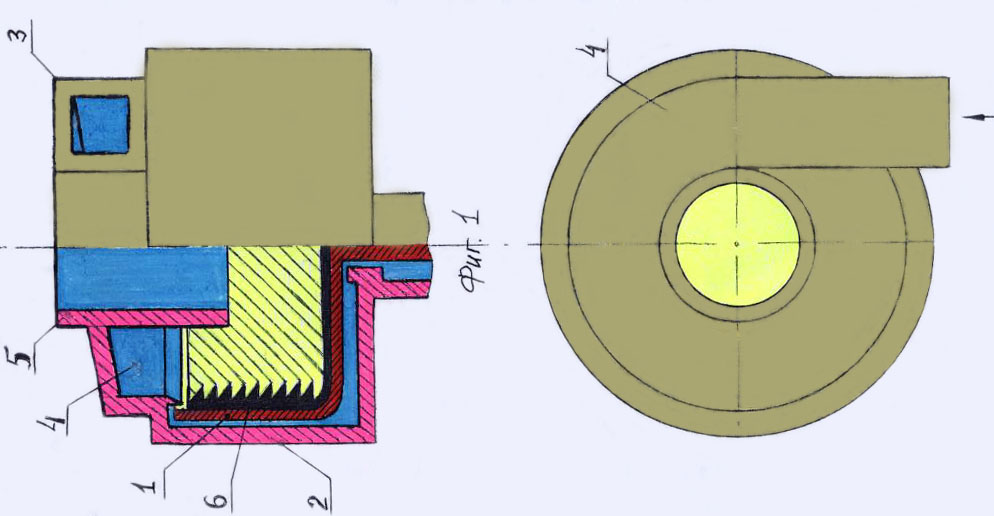

 Я изобретатель Томас Эдисон (по паспорту) с надеждой обращаюсь к властям Индии (Бхарат) с просьбой разрешить реализовать разрабатываемый мной с 2002г проект костюма телеприсутствия и другие (занимаюсь ими полвека) мои изобретательские проекты (по выбору индийской стороны) на территории Бхарата с использованием возможностей быстро усиливающейся промышленности Бхарата. Обязуюсь выполнять все интересы Бхарата. Буду очень признателен властям Бхарата за предоставление мне возможности реализовать мои инженерные проекты (больше сотни проектов), которыми я занимаюсь десятилетиями, но несмотря на мои полувековые усилия не имел возможности реализовать их в России. Я не последний человек в мировой робототехнике и искусственном интеллекте – приложу все усилия чтобы не разочаровать власти Бхарата!
Я изобретатель Томас Эдисон (по паспорту) с надеждой обращаюсь к властям Индии (Бхарат) с просьбой разрешить реализовать разрабатываемый мной с 2002г проект костюма телеприсутствия и другие (занимаюсь ими полвека) мои изобретательские проекты (по выбору индийской стороны) на территории Бхарата с использованием возможностей быстро усиливающейся промышленности Бхарата. Обязуюсь выполнять все интересы Бхарата. Буду очень признателен властям Бхарата за предоставление мне возможности реализовать мои инженерные проекты (больше сотни проектов), которыми я занимаюсь десятилетиями, но несмотря на мои полувековые усилия не имел возможности реализовать их в России. Я не последний человек в мировой робототехнике и искусственном интеллекте – приложу все усилия чтобы не разочаровать власти Бхарата!
универсальный изобретатель Томас Эдисон
Я Томас Эдисон могу доказать работодателю – я чемпион мира по конструированию, искусственному интеллекту, изобретательству, технической физике и топливной химии. По конструированию, изобретательству, искусственному интеллекту я сильнее сборной мира – могу это доказать индийским работодателям.
Я как изобретатель, конструктор и военно-промышленный предприниматель профессионально сильнее Илона Маска по ракетной технике, робототехнике и автомобилям. Могу это доказать индийским работодателям.
В сверхсложных вопросах качество мозга невозможно заменить неограниченным количеством мозгов меньшего качества. Талант простыми, дешевыми средствами превосходит то, чего профессионалы достигают сложными, дорогими средствами.
Мне хватит 10 лет чтобы доказать – я стою больше двух миллиардов человек для мировой экономики. Получите (по конечному результату) 2 миллиарда среднестатистических работников за зарплату одного рабочего, наняв меня конструктором-изобретателем! Мои разработки и больше 1000 незапатентованных изобретений предоставлю работодателю из нехристианской, немусульманской, неиудейской, несоциалистической страны.
Продаю мозг в профессиональном смысле
+79055453610 89055453610 robotsoldier@yandex.ru facebook.com/institutrobotov t.me/institutrobotov
टेलीप्रेजेंस और आभासी वास्तविकता के लिए सूट
ट्रांजिस्टर क्लच
एक्सोस्केलेटन
एंड्रॉयड
ह्यूमनॉइड रोबोट के लिए आर्टिफिशियल इंटेलिजेंस
एक ह्यूमनॉइड रोबोट के लिए एक गैस टरबाइन इंजन
हाइड्रोबोट्स
अंतरमहाद्वीपीय तोपें। पानी के नीचे बंदूकें
न्यूरोइंटरफेस
प्रोस्थेसिस
ह्यूमनॉइड रोबोट रनिंग और वॉकिंग एल्गोरिदम
कृत्रिम बुद्धि वाला खोज इंजन
कृत्रिम रोबोट त्वचा
रोबोट के टीवी कैमरे
रेडियो नियंत्रण संरक्षण
ह्यूमनॉइड रोबोट के लिए कंप्यूटर
होम रोबोट
माइक्रोबॉट
उड़ने वाले रोबोट
रॉकेट्स
एफटीएल स्टारशिप
रॉकेट के लिए गुरुत्वाकर्षण नेविगेशन प्रणाली
तारों का लाल विस्थापन
न्यूट्रॉन बंदूक
चंद्रमा
ऑटोमोबाइल
फॉर्मूला 1 कार रेसिंग
रोबोफॉर्मूला
मशीन के उपकरण
स्टीरियो स्पीकर. माइक्रोफ़ोन
अर्थशास्त्र का सिद्धांत. ईसाई विरोधी पार्टी
गांगेय उपनिवेशवादियों का दर्शन
विकासवाद का सिद्धांत
इंजीनियरिंग शिक्षा
विश्वकोश
सरकारी प्रबंधन
रोबोटिक्स के नियम
मेरे मॉडल
रोबोसाइट्स
institutrobotov.ru 2004-2025г